Development of a Spherical Positioning Robot and Neuro-Navigation System for Precise and Repetitive Non-Invasive Brain Stimulation




Abstract
:1. Introduction
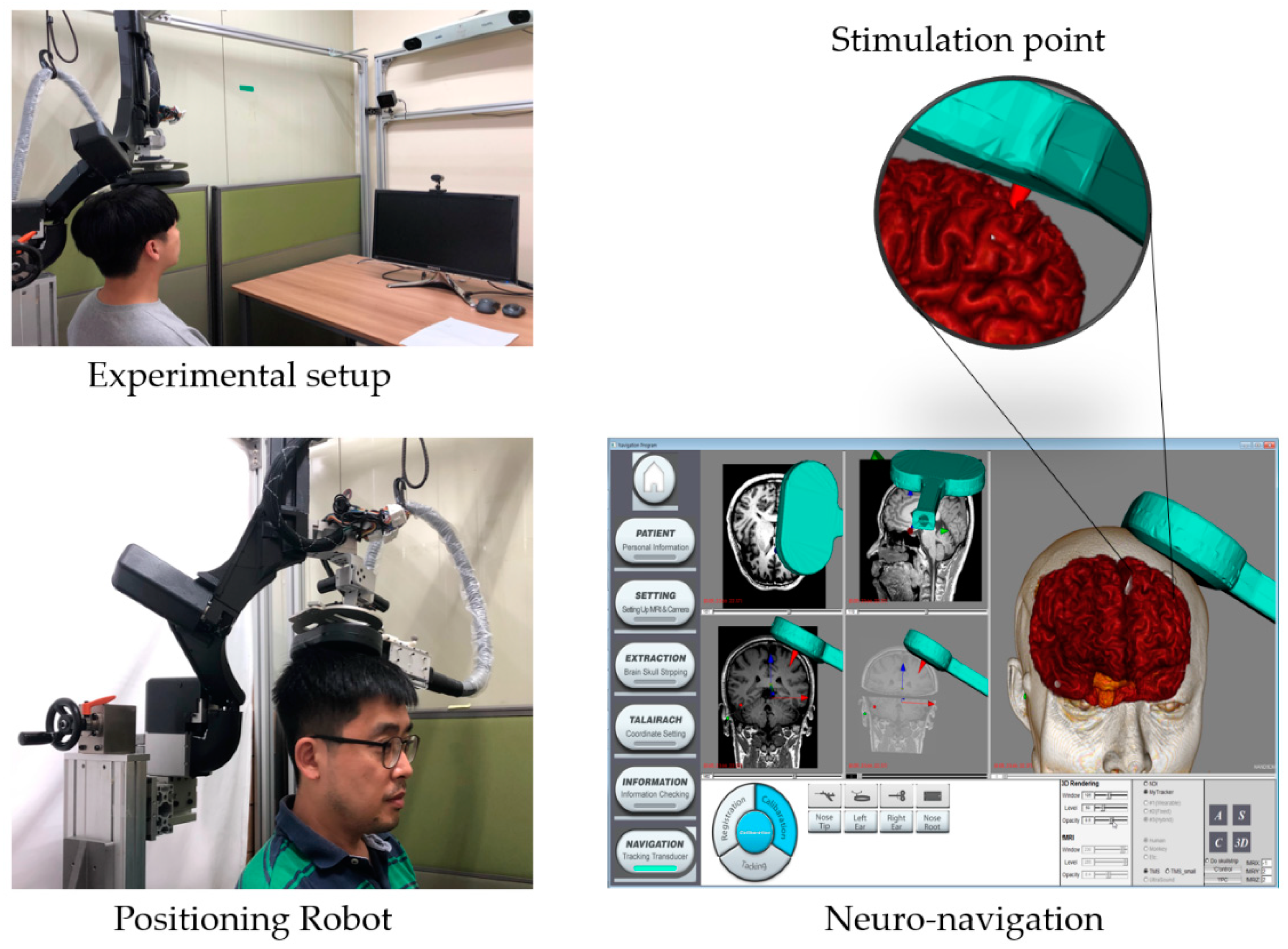
2. Overall System
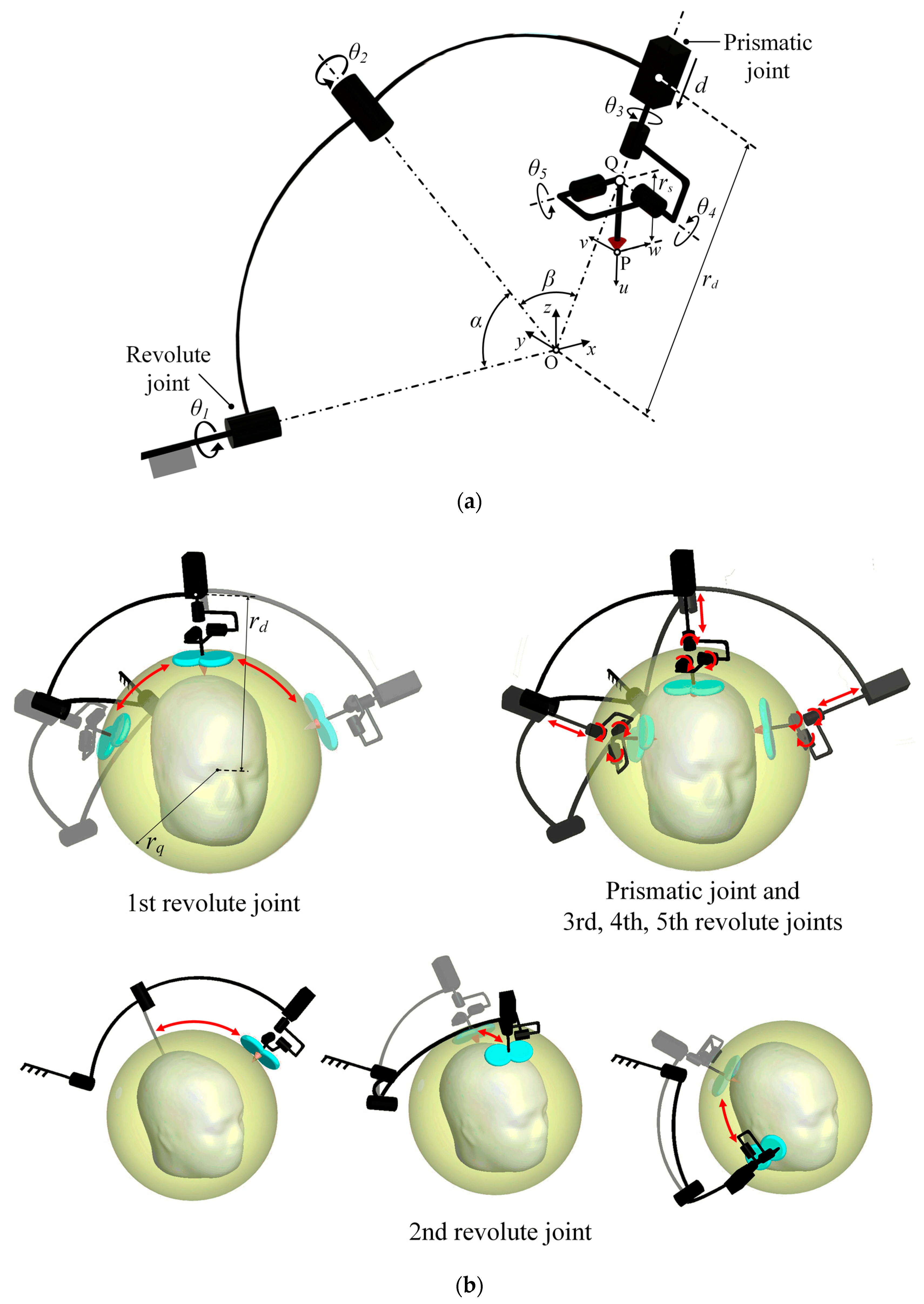
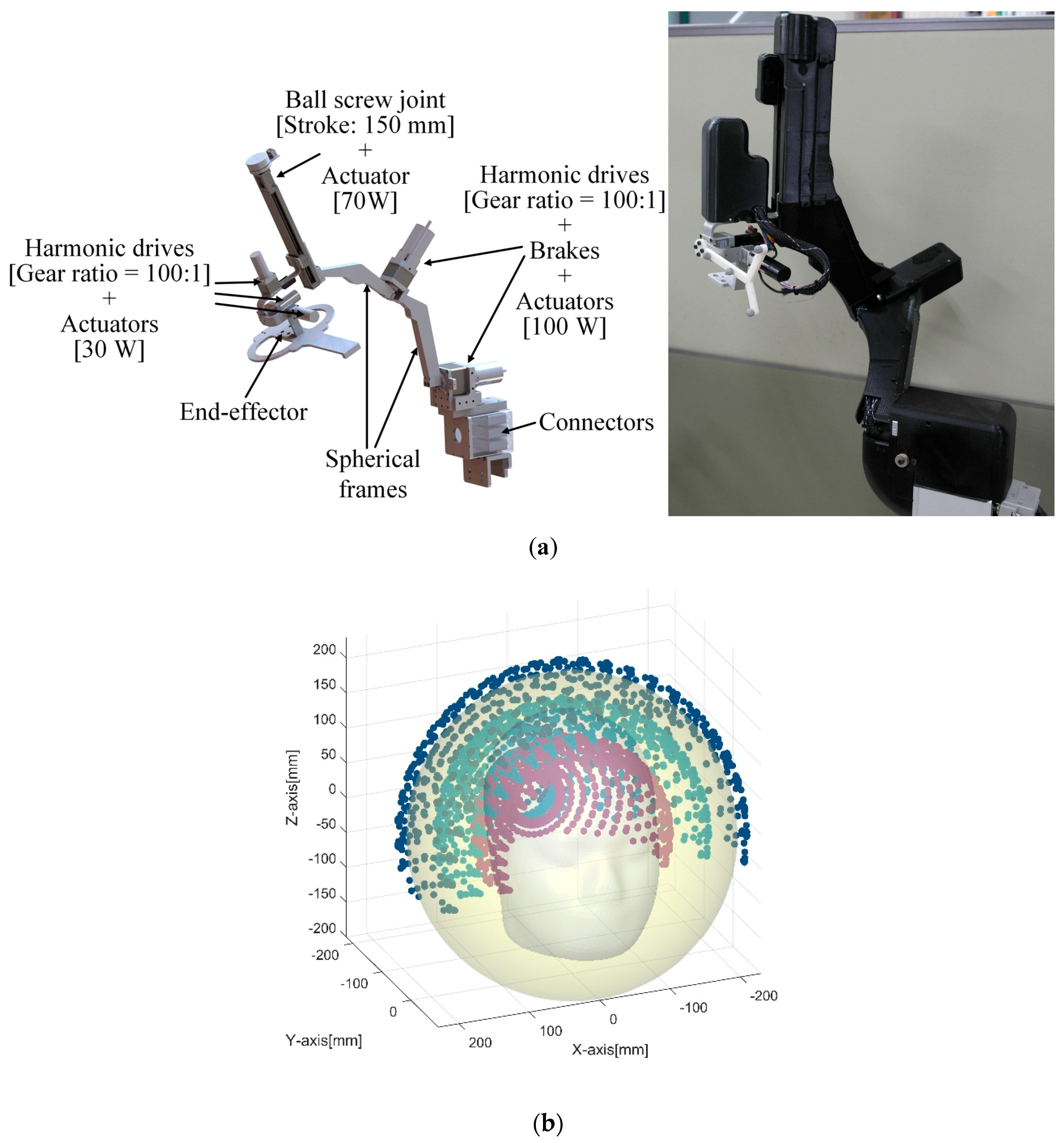
3. Spherical Robotic Positioning Device
3.1. Inverse Kinematic Analysis
3.2. 3D-Modeling
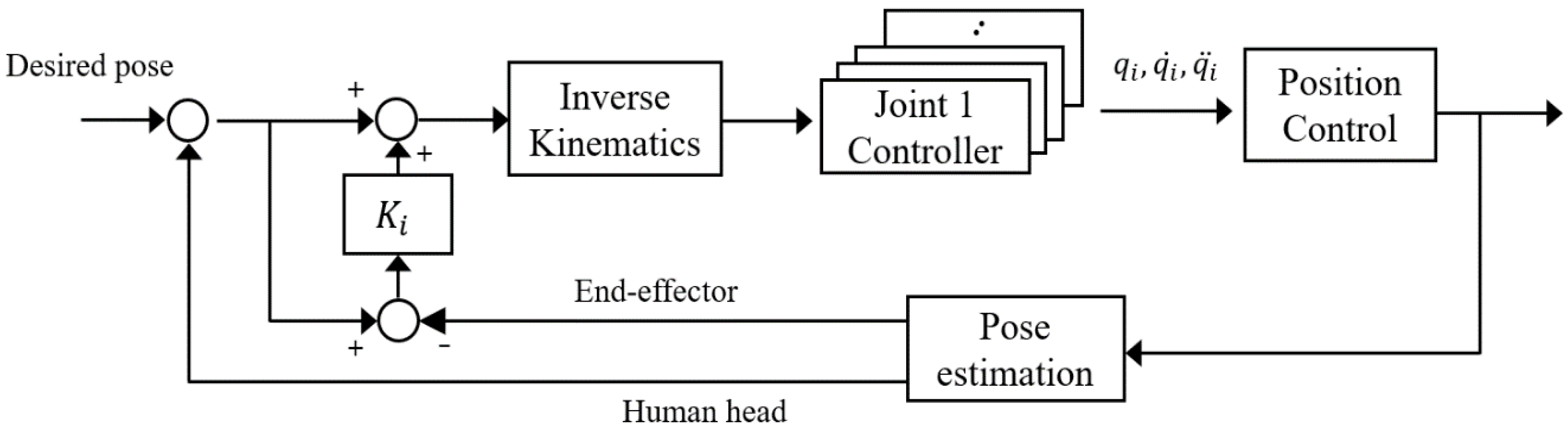
3.3. Control and Motion Compensation
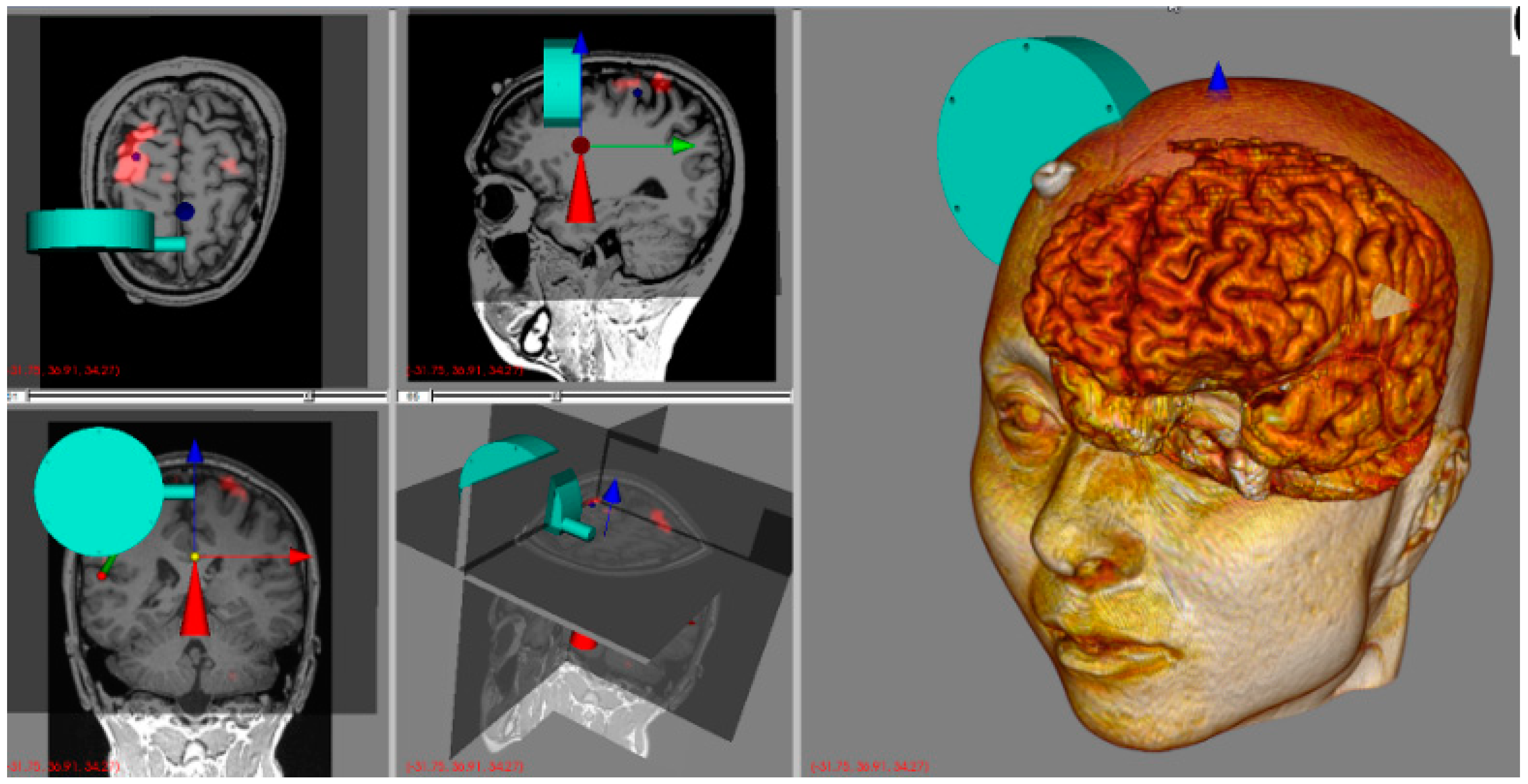
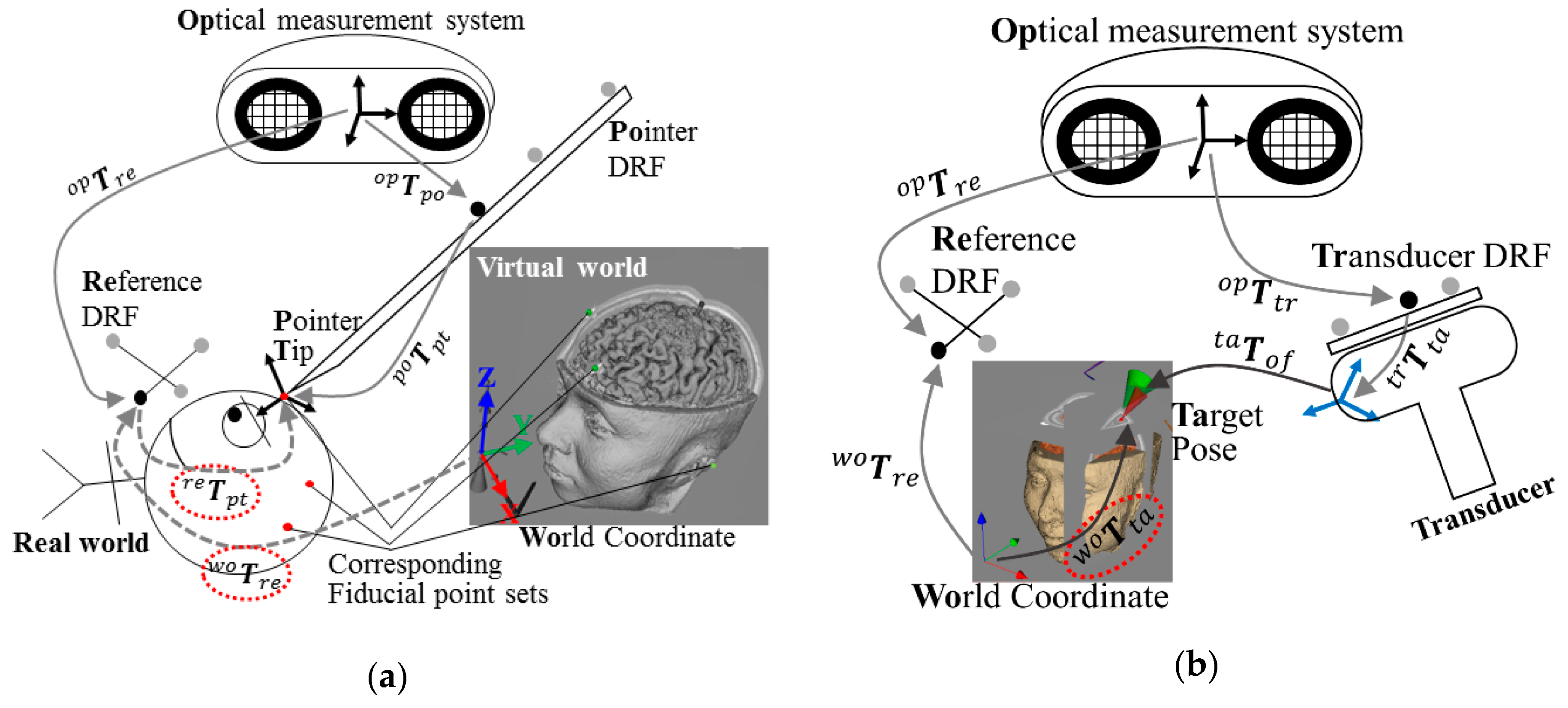
4. Neuro-Navigation System
5. Experiments and Results
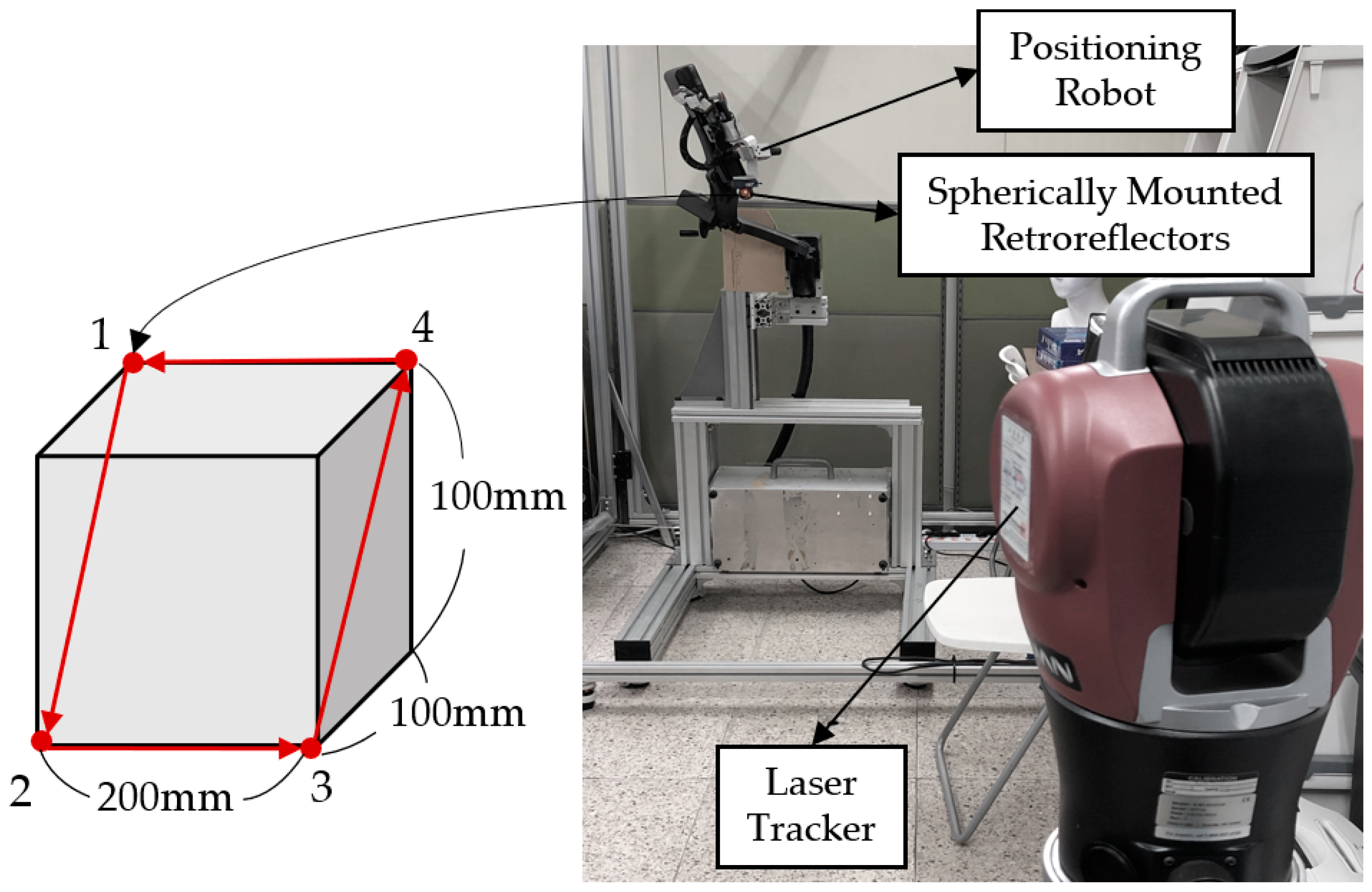
5.1. Repeatability Test
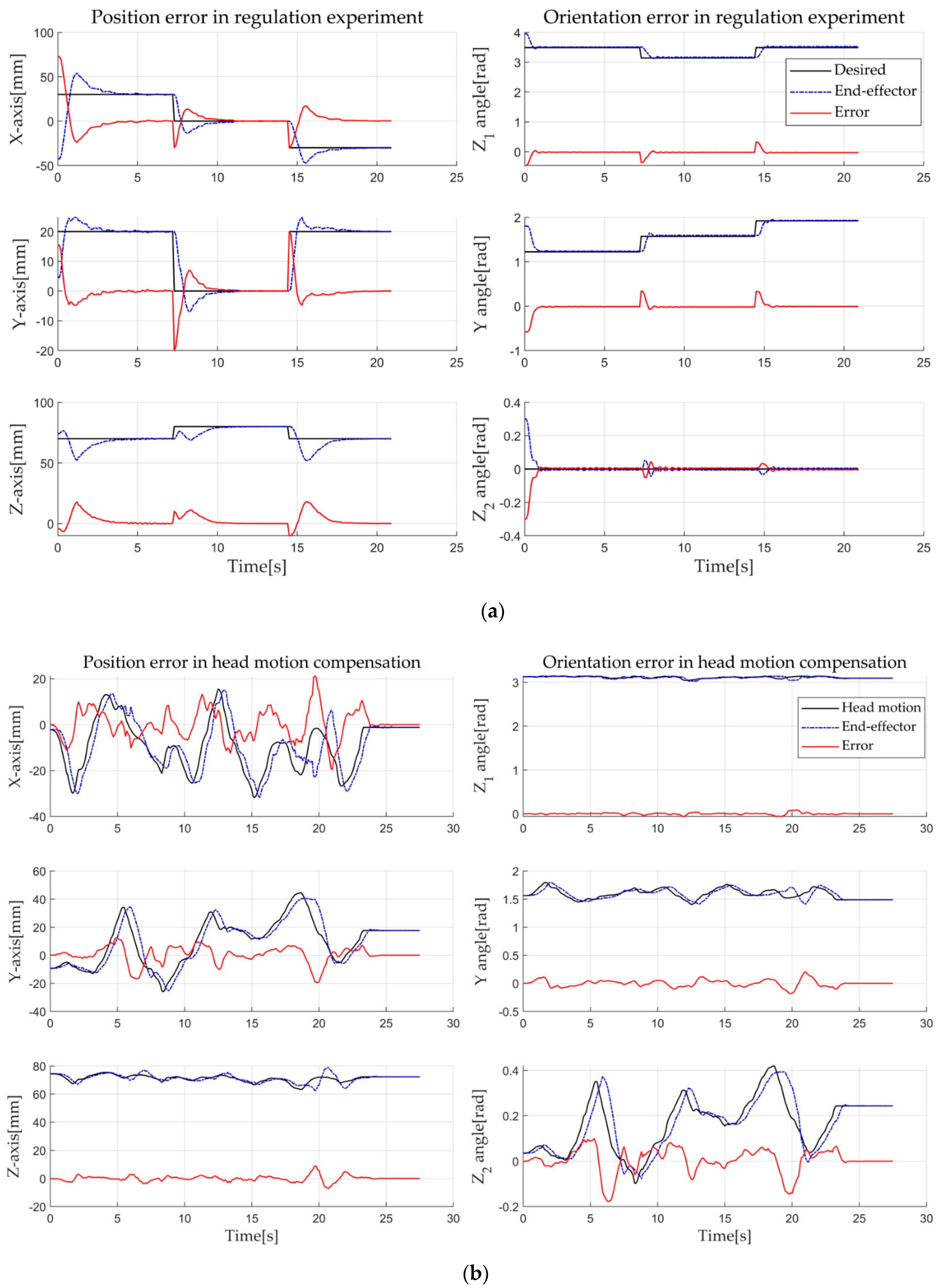
5.2. Regulation and Motion-Compensation Tests
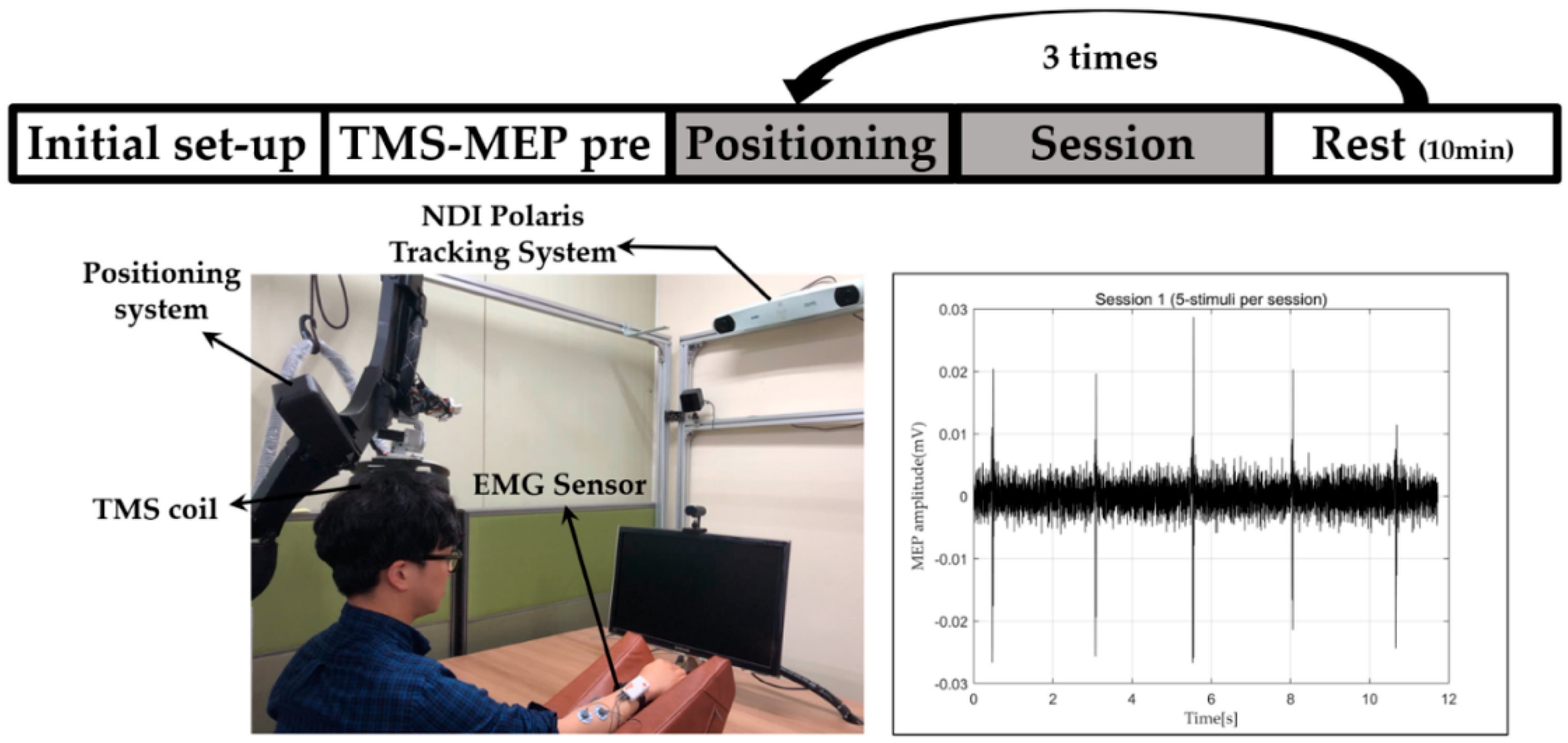
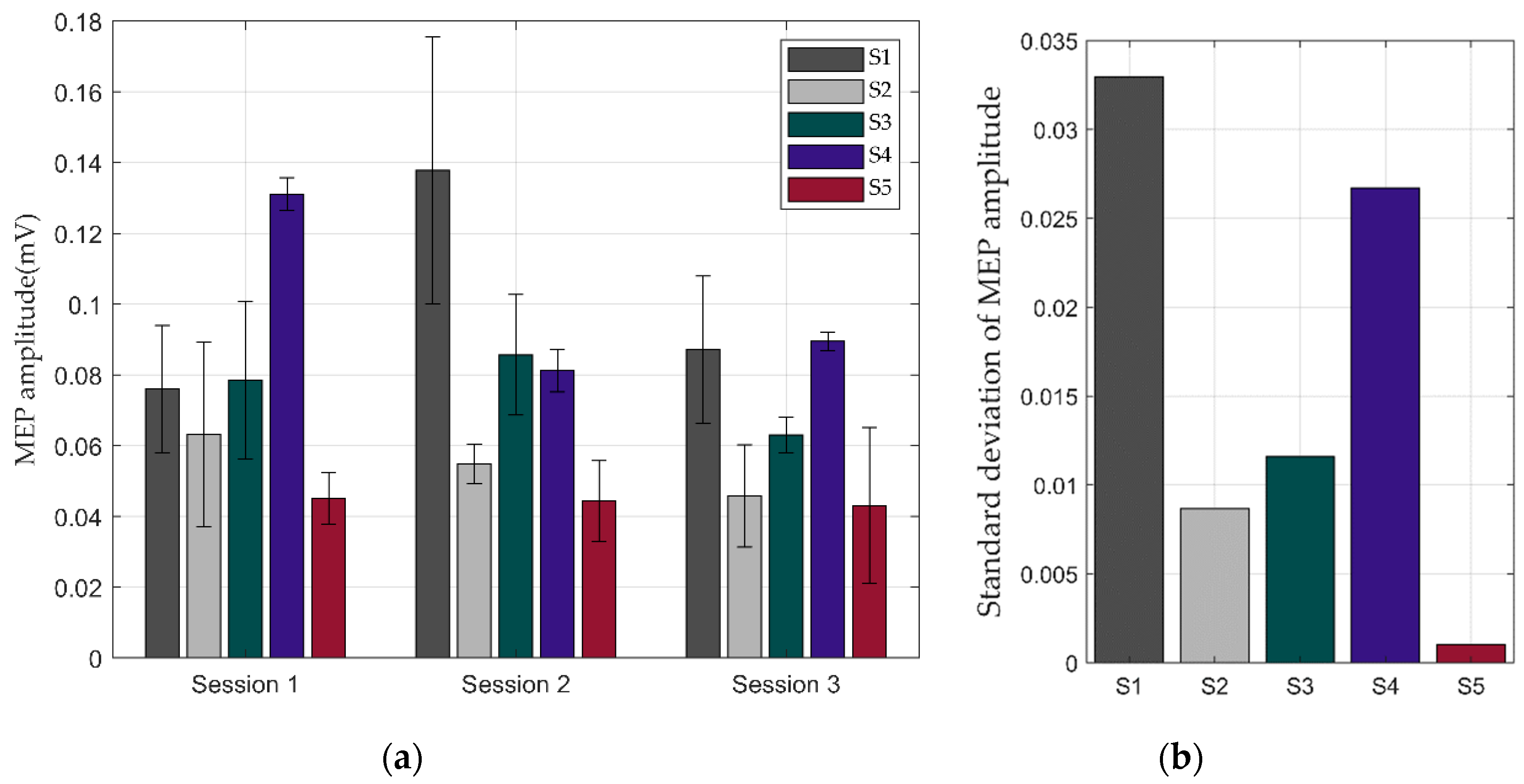
5.3. Repeated Response Experiment of Brain Stimulation
5.3.1. Subjects
5.3.2. Procedure
5.3.3. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Barker, A.T.; Jalinous, R.; Freeston, I.L. Noninvasive magnetic stimulation of human motor cortex. Lancet 1985, 325, 1106–1107. [Google Scholar] [CrossRef]
- Laakso, I.; Hirata, A.; Ugawa, Y. Effects of coil orientation on the electric field induced by TMS over the hand motor area. Phys. Med. Biol. 2013, 59, 203. [Google Scholar] [CrossRef] [PubMed]
- O’Reardon, J.P. Efficacy and safety of transcranial magnetic stimulation in the acute treatment of major depression: A multisite randomized controlled trial. Biol. Psychiatry 2007, 62, 1208–1216. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Lee, S. Development of a wearable robotic positioning system for noninvasive transcranial focused ultrasound stimulation. IEEE/ASME Trans. Mech. 2016, 21, 2284–2293. [Google Scholar] [CrossRef]
- Pheasant, S.; Haslegrave, C.M. Bodyspace: Anthropometry, Ergonomics and the Design of Wor; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Lum, M.J.H. Optimization of a spherical mechanism for a minimally invasive surgical robot: Theoretical and experimental approaches. IEEE Trans. Biomed. Eng. 2006, 53, 1440–1445. [Google Scholar] [CrossRef] [PubMed]
- Al Bassit, L.; Poisson, G.; Vieyres, P. Kinematics of a Dedicated 6 DOF Robot for Tele-echography. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003. [Google Scholar]
- Zorn, L. Design and evaluation of a robotic system for transcranial magnetic stimulation. IEEE Trans. Biomed. Eng. 2011, 59, 805–815. [Google Scholar] [CrossRef] [PubMed]
- Wilson, W.; Hulls, C.; Bell, G. Relative end-effector control using Cartesian position based visual servoing. IEEE Trans. Robot. Autom. 1996, 12, 684–696. [Google Scholar] [CrossRef]
- Luh, J.; Walker, M.; Paul, R. Resolved-acceleration control of mechanical manipulators. IEEE Trans. Autom. Control 1980, 25, 468–474. [Google Scholar] [CrossRef]
- Caccavale, F. Resolved-acceleration control of robot manipulators: A critical review with experiments. Robotica 1998, 16, 565–573. [Google Scholar] [CrossRef]
- Takahashi, S.; Vajkoczy, P.; Picht, T. Navigated transcranial magnetic stimulation for mapping the motor cortex in patients with rolandic brain tumors. Neurosurg. Focus 2013, 34, E3. [Google Scholar] [CrossRef] [PubMed]
- Cleary, K.; Cheng, P.; Enquobahrie, A.; Yaniv, Z. IGSTK: The Book; Signature Book Printing: Gaithersburg, MD, USA, 2007. [Google Scholar]
- Iglesias, J.E.; Liu, C.-Y.; Thompson, P.M.; Tu, Z. Robust brain extraction across datasets and comparison with publicly available methods. IEEE Trans. Med. Imaging 2011, 30, 1617–1634. [Google Scholar] [CrossRef] [PubMed]
- Horn, B.K. Closed-form solution of absolute orientation using unit quaternions. JOSA A 1987, 4, 629–642. [Google Scholar] [CrossRef]
- Slamani, M.; Nubiola, A.; Bonev, I. Assessment of the positioning performance of an industrial robot. Ind. Robot. 2012, 39, 57–68. [Google Scholar] [CrossRef]
- Nubiola, A.; Bonev, I.A. Absolute calibration of an ABB IRB 1600 robot using a laser tracker. Robot. Comput. Integr. Manuf. 2013, 29, 236–245. [Google Scholar] [CrossRef]
- Oldfield, R.C. The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologia 1971, 9, 97–113. [Google Scholar] [CrossRef]
- Rossini, P.M. Applications of magnetic cortical stimulation. Electroencephalogr. Clin. Neurophysiol. Suppl. 1999, 52, 171–185. [Google Scholar] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| Reference DRF transform in optical measurement system (OMS) coordinate | |
| Pointer DRF transform in OMS coordinate | |
| Transducer DRF transform in OMS coordinate | |
| Reference DRF transform in world coordinate of user interface (UI), result of registration | |
| Target pose in world coordinate of UI | |
| Pointer tip transform in reference DRF coordinate | |
| Offset from transducer DRF to target hot spot | |
| Offset to display transducer in UI | |
| Offset from pointer DRF to pointer tip |
| Point | Max. | Min. | Std. |
|---|---|---|---|
| 1 | 0.0350 | 0.0043 | 0.0097 |
| 2 | 0.0504 | 0.0058 | 0.0162 |
| 3 | 0.0467 | 0.0061 | 0.0115 |
| 4 | 0.0260 | 0.0059 | 0.0061 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, H.; Ryu, W.; Cho, S.; Yang, W.; Lee, S. Development of a Spherical Positioning Robot and Neuro-Navigation System for Precise and Repetitive Non-Invasive Brain Stimulation. Appl. Sci. 2019, 9, 4561. https://doi.org/10.3390/app9214561
Shin H, Ryu W, Cho S, Yang W, Lee S. Development of a Spherical Positioning Robot and Neuro-Navigation System for Precise and Repetitive Non-Invasive Brain Stimulation. Applied Sciences. 2019; 9(21):4561. https://doi.org/10.3390/app9214561
Chicago/Turabian StyleShin, Hyunsoo, Wooseok Ryu, Sungtaek Cho, Woosung Yang, and Sungon Lee. 2019. "Development of a Spherical Positioning Robot and Neuro-Navigation System for Precise and Repetitive Non-Invasive Brain Stimulation" Applied Sciences 9, no. 21: 4561. https://doi.org/10.3390/app9214561
APA StyleShin, H., Ryu, W., Cho, S., Yang, W., & Lee, S. (2019). Development of a Spherical Positioning Robot and Neuro-Navigation System for Precise and Repetitive Non-Invasive Brain Stimulation. Applied Sciences, 9(21), 4561. https://doi.org/10.3390/app9214561