A New Adaptive Fuzzy PID Controller Based on Riccati-Like Equation with Application to Vibration Control of Vehicle Seat Suspension


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. New Adaptive Fuzzy PID Controller
2.1. Interval Type 2 Fuzzy Neural Network Model
2.2. Adaptive Fuzzy PID Control
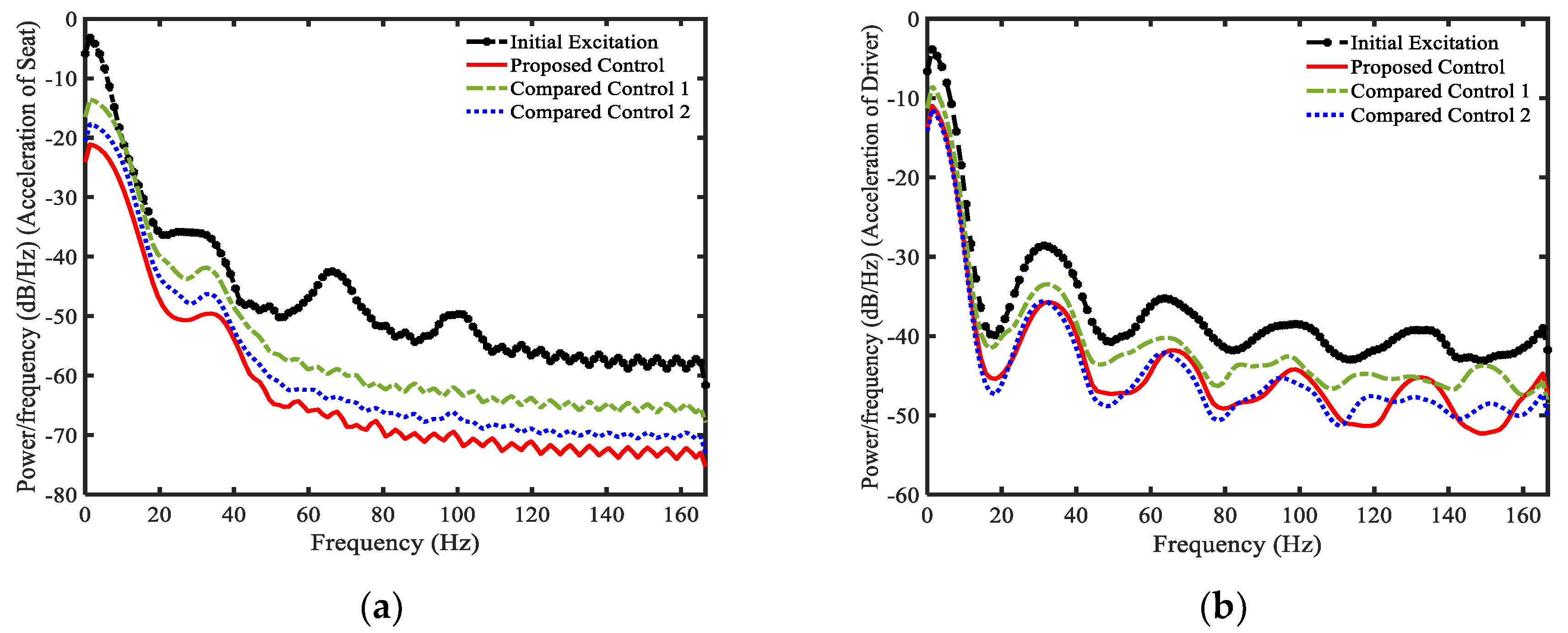
3. Application to Vibration Control
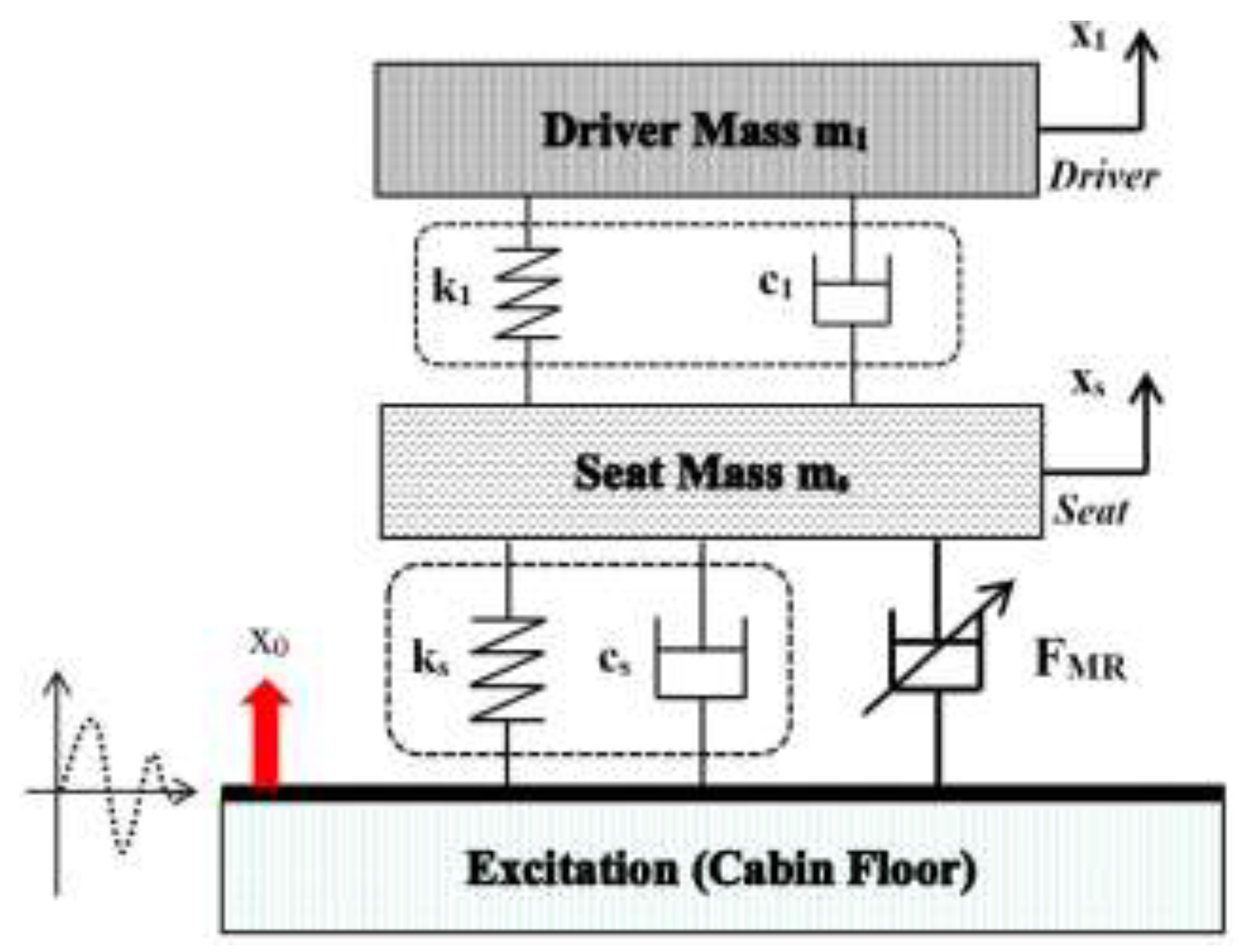
3.1. Seat Suspension Model
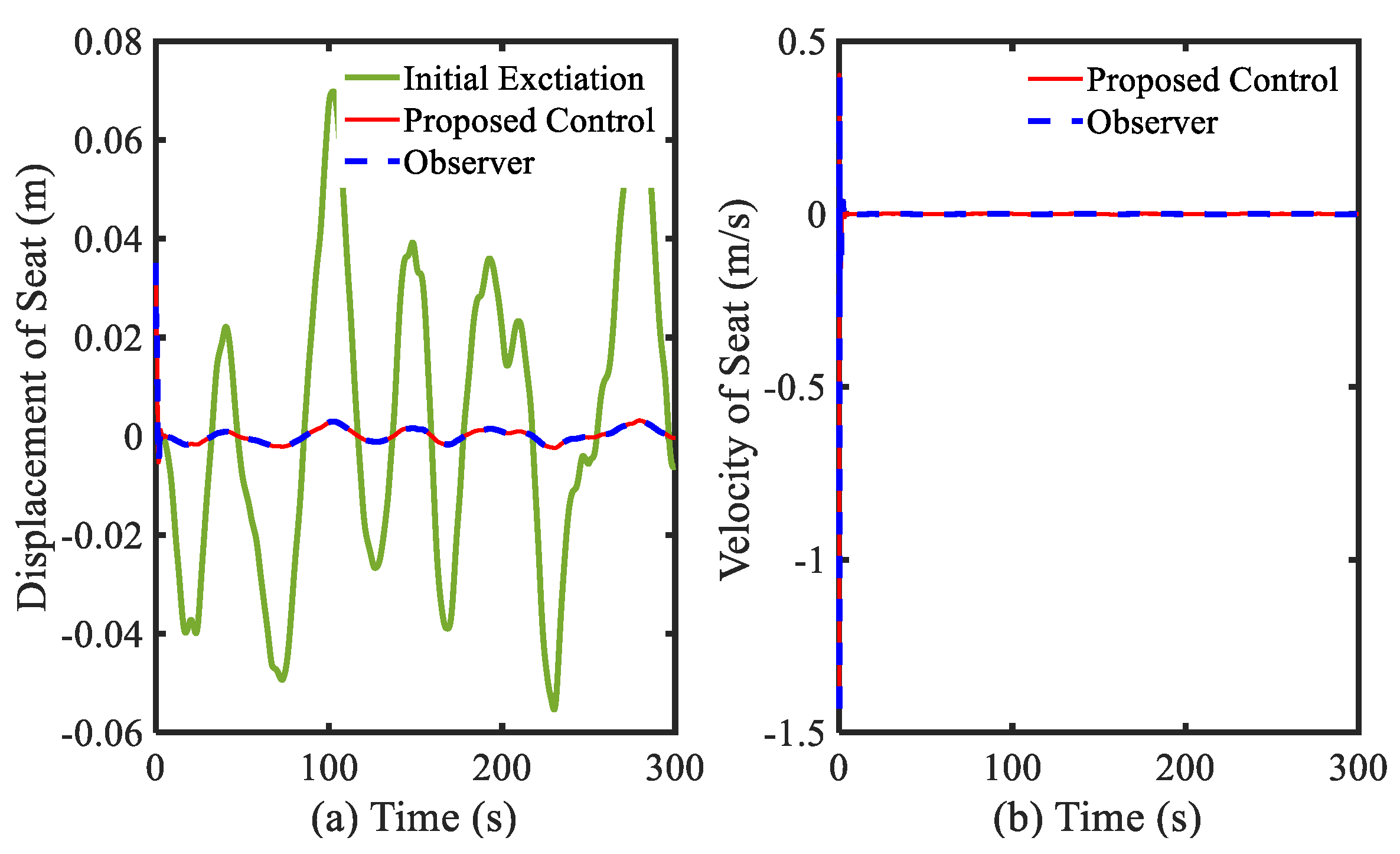
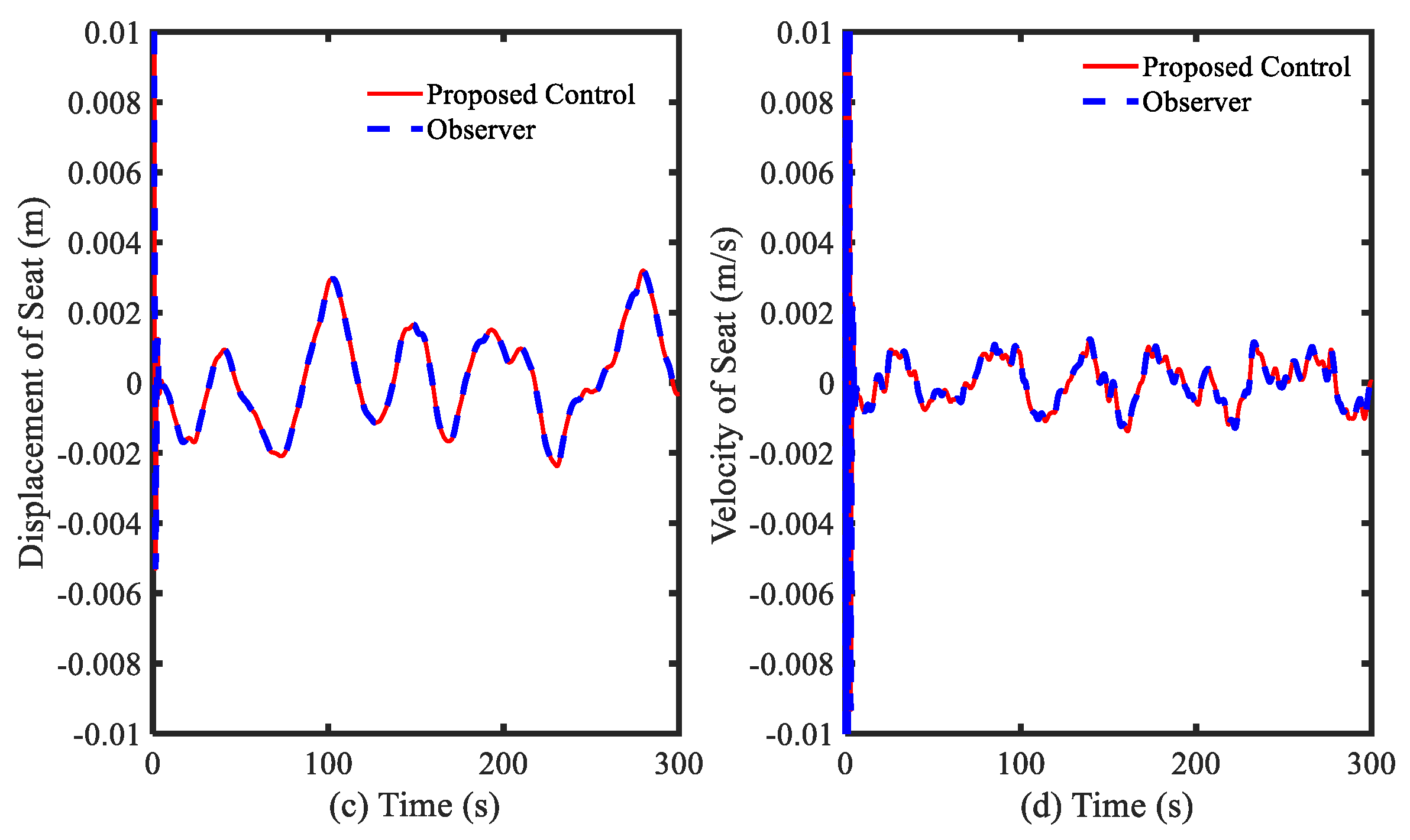
3.2. Computer Simulations
4. Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bounemeur, A.; Chemachema, M.; Essounbouli, N. Indirect adaptive fuzzy fault-tolerant tracking control for MIMO nonlinear systems with actuator and sensor failures. ISA Trans. 2018, 79, 45–61. [Google Scholar] [CrossRef] [PubMed]
- Davanipour, M.; Khayatian, A.R.; Dehghani, M.; Arefi, M.M. A solution for enhancement of transient performance in nonlinear adaptive control: Optimal adaptive reset based on barrier Lyapunov function. ISA Trans. 2018, 80, 169–175. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Su, H. Fuzzy adaptive control of nonlinear MIMO systems with unknown dead zone outputs. J. Frankl. Inst. 2018, 355, 5690–5720. [Google Scholar] [CrossRef]
- Moradi, M.; Fekih, A. Adaptive PID-sliding-mode fault-tolerant control approach for vehicle suspension systems subject to actuator faults. IEEE Trans. Veh. Technol. 2014, 63, 1041–1054. [Google Scholar] [CrossRef]
- Cao, K.; Gao, X.; Lam, H.-K.; Vasilakos, A. H∞ fuzzy PID control synthesis for Takagi–Sugeno fuzzy systems. IET Control. Theory Appl. 2016, 10, 607–616. [Google Scholar] [CrossRef]
- Chamsai, T.; Jirawattana, P.; Radpukdee, T. Robust adaptive PID controller for a class of uncertain nonlinear systems: An application for speed tracking control of an SI engine. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Mahmoodabadi, M.J.; Abedzadeh Maafi, R.; Taherkhorsandi, M. An optimal adaptive robust PID controller subject to fuzzy rules and sliding modes for MIMO uncertain chaotic systems. Appl. Soft Comput. 2017, 52, 1191–1199. [Google Scholar] [CrossRef]
- Subramanian, R.G.; Elumalai, V.K.; Karuppusamy, S.; Canchi, V.K. Uniform ultimate bounded robust model reference adaptive PID control scheme for visual servoing. J. Frankl. Inst. 2017, 354, 1741–1758. [Google Scholar] [CrossRef]
- Phu, D.X.; An, J.-H.; Choi, S.-B. A novel adaptive PID controller with application to vibration control of a semi-active vehicle seat suspension. Appl. Sci. 2017, 7, 1055. [Google Scholar] [CrossRef]
- Van, M.; Do, X.P.; Mavrovouniotis, M. Self-tuning fuzzy PID-nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. ISA Trans. 2019. [Google Scholar] [CrossRef]
- Phu, D.X.; Choi, S.-M.; Choi, S.-B. A new adaptive hybrid controller for vibration control of a vehicle seat suspension featuring MR damper. J. Vib. Control. 2017, 23, 3392–3413. [Google Scholar] [CrossRef]
- Phu, D.X.; Huy, T.D.; Mien, V.; Choi, S.-B. A new composite adaptive controller featuring the neural network and prescribed sliding surface with application to vibration control. Mech. Syst. Signal. Process. 2018, 107, 409–428. [Google Scholar] [CrossRef]
- Do, X.P.; Nguyen, Q.H.; Choi, S.-B. New hybrid optimal controller applied to a vibration control system subjected to severe disturbances. Mech. Syst. Signal. Process. 2019, 124, 408–423. [Google Scholar]
- Phu, D.X.; Hung, N.Q.; Choi, S.-B. A novel adaptive controller featuring inversely fuzzified values with application to vibration control of magnetorheological seat suspension system. J. Vib. Control. 2018, 24, 5000–5018. [Google Scholar]
- Li, Y.; Zhang, H.; Liang, X.; Huang, B. Event-triggered-based distributed cooperative energy management for multi-energy systems. IEEE Trans. Ind. Inform. 2019, 15, 2008–2022. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Gao, D.W.; Zhou, J. Distributed optimal energy management for energy internet. IEEE Trans. Ind. Inform. 2019, 13, 3081–3097. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Huang, B.; Han, J. A distributed Newton–Raphson-based coordination algorithm for multi-agent optimization with discrete-time communication. Neural Comput. Appl. 2018, 1–15. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Zhang, L. A rapid fuzzy rule clustering method based on granular computing. Appl. Soft Comput. 2014, 24, 534–542. [Google Scholar] [CrossRef]
- Mendel, J.M. Computing derivatives in interval type-2 fuzzy logic systems. IEEE Trans. Fuzzy Syst. 2004, 12, 84–98. [Google Scholar] [CrossRef]
- Juang, C.-F.; Chen, C.-Y. Data-driven interval type-2 neural fuzzy system with high learning accuracy and improved model interpretability. IEEE Trans. Cybern. 2013, 43, 1781–1795. [Google Scholar] [CrossRef]
- Liang, Q.; Mendel, J.M. Interval type-2 fuzzy logic systems: Theory and design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef]
- Ciccarella, G.; Dalla Mora, M.; Germani, A. A Luenberger-like observer for nonlinear systems. Int. J. Control. 1993, 57, 537–556. [Google Scholar] [CrossRef]
- Wu, T.-S.; Karkoub, M.; Wang, H.; Chen, H.-S.; Chen, T.-H. Robust tracking control of MIMO underactuated nonlinear systems with dead-zone band and delayed uncertainty using an adaptive fuzzy control. IEEE Trans. Fuzzy Syst. 2017, 25, 905–918. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phu, D.X.; Choi, S.-B. A New Adaptive Fuzzy PID Controller Based on Riccati-Like Equation with Application to Vibration Control of Vehicle Seat Suspension. Appl. Sci. 2019, 9, 4540. https://doi.org/10.3390/app9214540
Phu DX, Choi S-B. A New Adaptive Fuzzy PID Controller Based on Riccati-Like Equation with Application to Vibration Control of Vehicle Seat Suspension. Applied Sciences. 2019; 9(21):4540. https://doi.org/10.3390/app9214540
Chicago/Turabian StylePhu, Do Xuan, and Seung-Bok Choi. 2019. "A New Adaptive Fuzzy PID Controller Based on Riccati-Like Equation with Application to Vibration Control of Vehicle Seat Suspension" Applied Sciences 9, no. 21: 4540. https://doi.org/10.3390/app9214540
APA StylePhu, D. X., & Choi, S.-B. (2019). A New Adaptive Fuzzy PID Controller Based on Riccati-Like Equation with Application to Vibration Control of Vehicle Seat Suspension. Applied Sciences, 9(21), 4540. https://doi.org/10.3390/app9214540