Aerodynamic Damping Prediction for Turbomachinery Based on Fluid-Structure Interaction with Modal Excitation

Abstract
1. Introduction
2. Numerical Methods
2.1. Fluid Dynamics
2.2. Structural Dynamics
2.3. Fluid-Structure Interaction
2.4. Damping Calculation Method
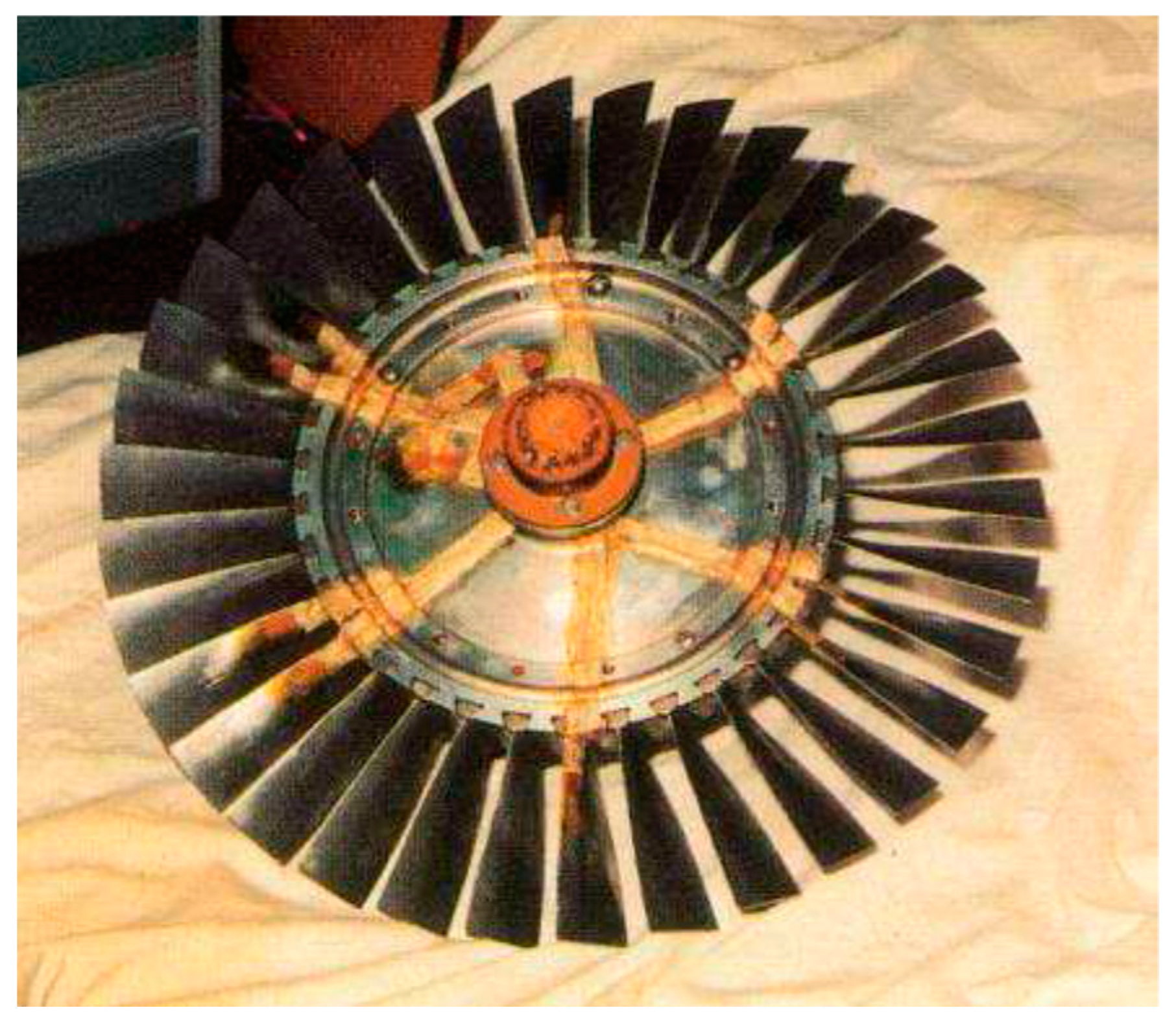
3. Computation Models
4. Results and Discussion
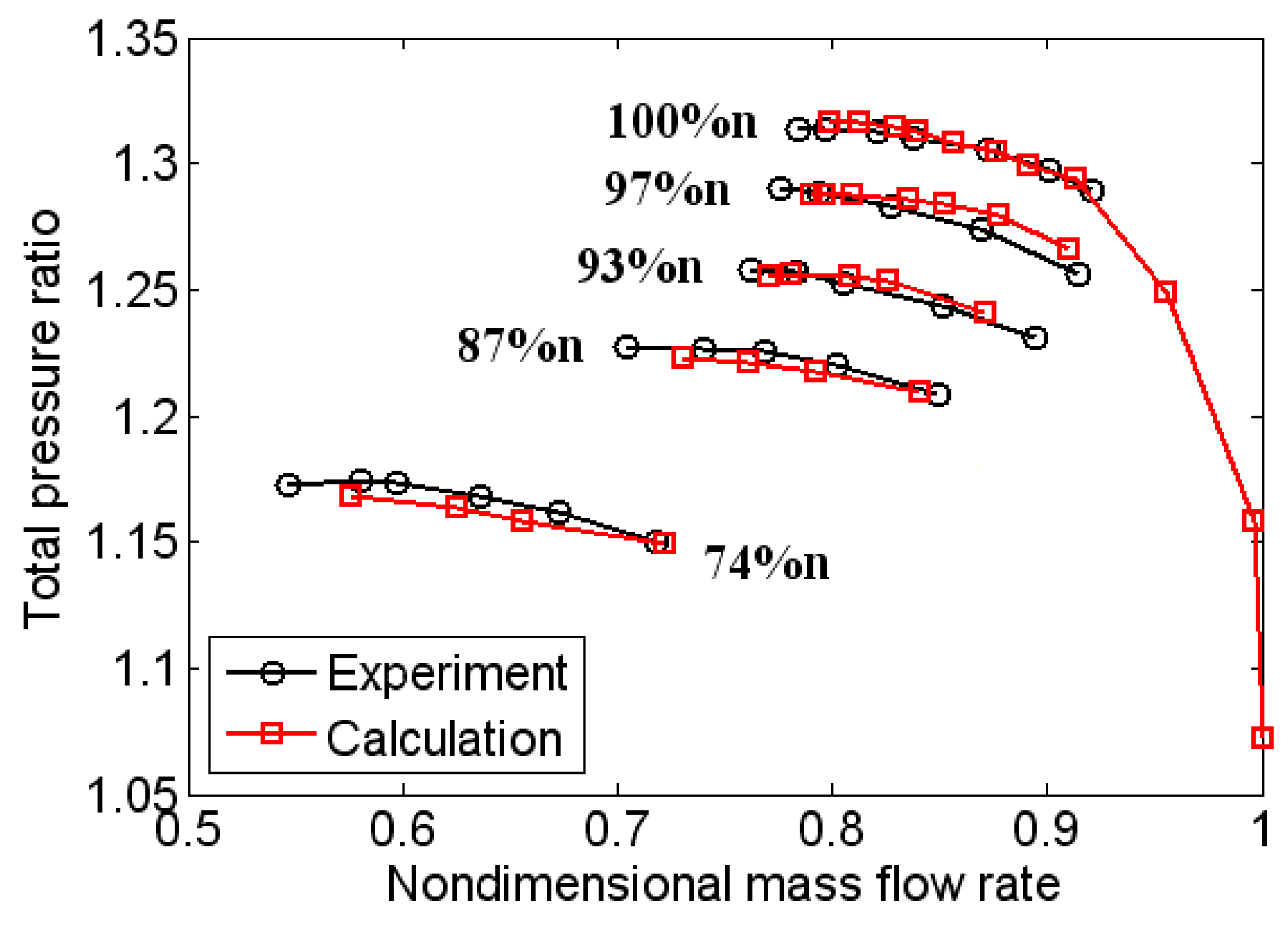
4.1. Aerodynamic Performance
4.2. Modal Analysis of the Rotor Blade
4.3. Aerodynamic Damping
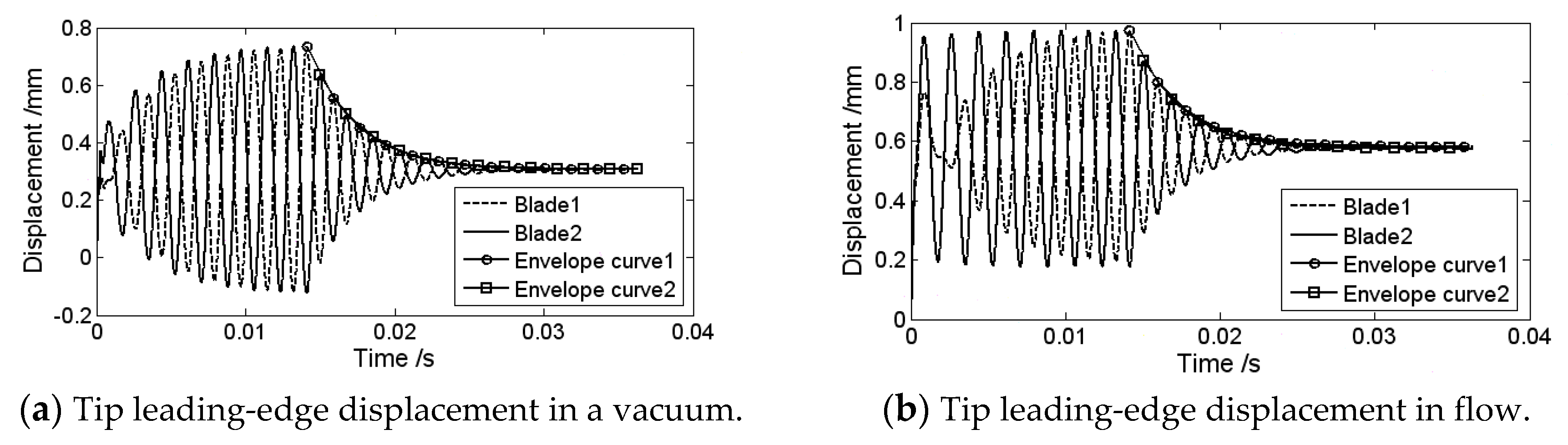
4.3.1. Modal Responses in the Vacuum
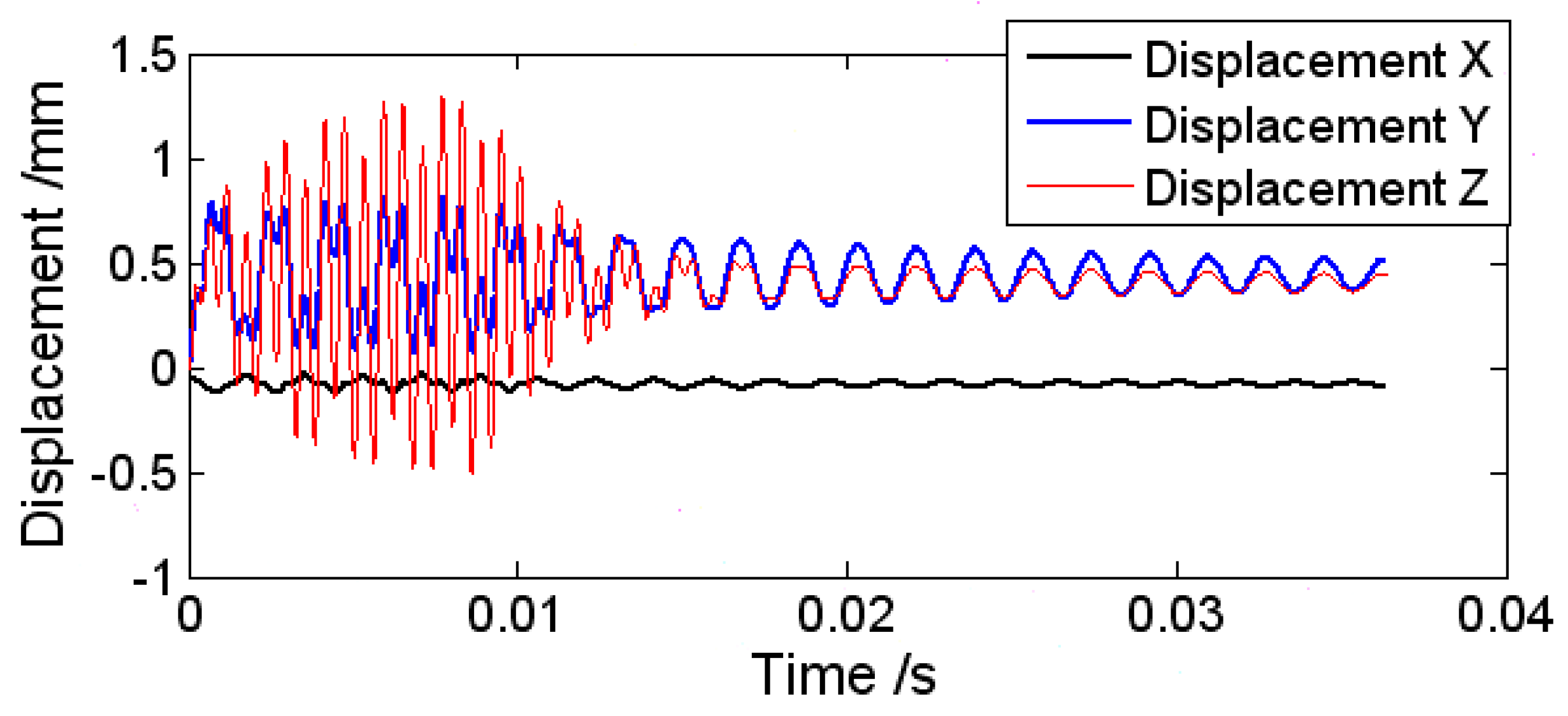
4.3.2. Modal Response in Flow
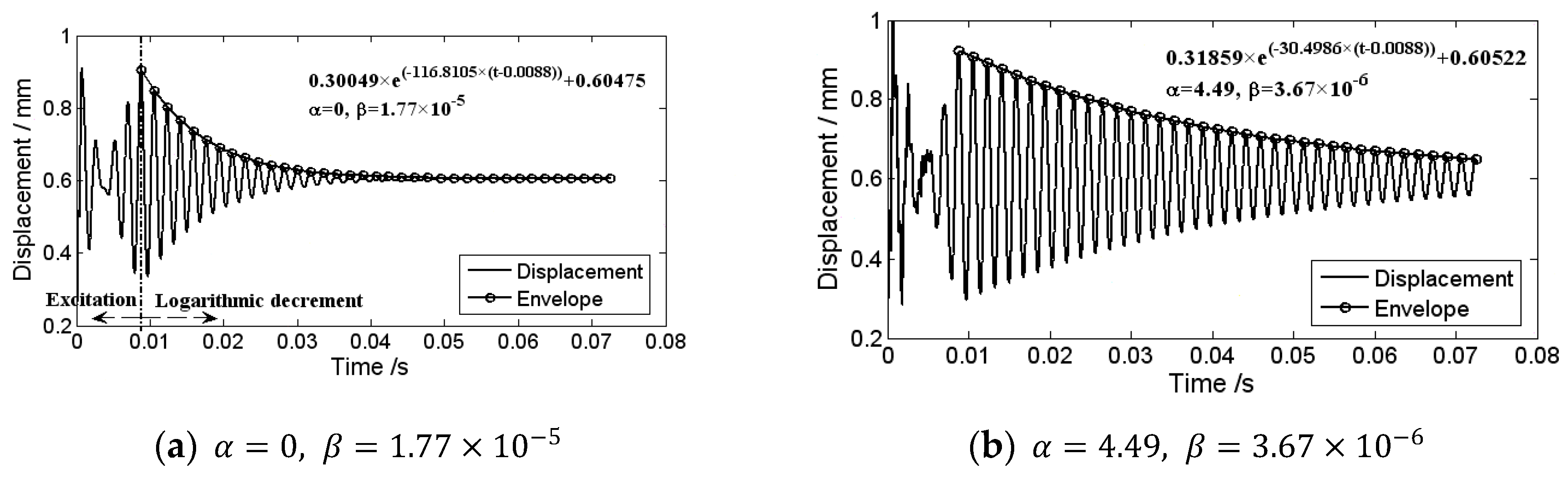
4.3.3. Aerodynamic Damping Calculation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mikolajczak, A.; Arnoldi, R.A.; Snyder, L.E.; Stargardter, H. Advances in fan and compressor blade flutter analysis and predictions. J. Aircr. 2008, 12, 325–332. [Google Scholar] [CrossRef]
- Chen, M.Z. Development of fan/compressor techniques and suggestions on further researches. J. Aerosp. Power 2002, 17, 1–15. (In Chinese) [Google Scholar]
- Lane, F. System Mode Shapes in the Flutter of Compressor Blade Rows. J. Aeronaut. Sci. 1956, 23, 54–66. [Google Scholar] [CrossRef]
- Carta, F.O. Coupled Blade-Disk-Shroud Flutter Instabilities in Turbojet Engine Rotors. J. Eng. Gas Turbines Power 1967, 89, 419–426. [Google Scholar] [CrossRef]
- Bendiksen, O. Aeroelastic problems in turbomachines. In Proceedings of the AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Long Beach, CA, USA, 2–4 April 1990; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1990; pp. 1736–1761. [Google Scholar]
- Cinnella, P.; De Palma, P.; Pascazio, G.; Napolitano, M. A Numerical Method for Turbomachinery Aeroelasticity. J. Turbomach. 2004, 126, 310–316. [Google Scholar] [CrossRef]
- Srivastava, R.; Bakhle, M.A.; Keith, T.G.; Hoyniak, D. Aeroelastic analysis of turbomachinery: Part II—Stability computations. Int. J. Numer. Methods Heat Fluid Flow 2004, 14, 382–402. [Google Scholar] [CrossRef]
- He, L.; Wang, D.X. Concurrent Blade Aerodynamic-Aero-elastic Design Optimization Using Adjoint Method. J. Turbomach. 2010, 133, 011–021. [Google Scholar] [CrossRef]
- Sisto, F.; Thangam, S.; Abdel-Rahim, A. Computational prediction of stall flutter in cascaded airfoils. AIAA J. 1991, 29, 1161–1167. [Google Scholar] [CrossRef]
- Hwang, C.J.; Fang, J.M. Flutter Analysis of Cascades Using an Euler/Navier-Stokes Solution-Adaptive Approach. J. Propuls. Power 2008, 15, 54–63. [Google Scholar] [CrossRef]
- Sadeghi, M.; Liu, F. Computation of cascade flutter by uncoupled and coupled methods. Int. J. Comput. Fluid Dyn. 2005, 19, 559–569. [Google Scholar] [CrossRef]
- Sadeghi, M.; Liu, F. Investigation of Mistuning Effects on Cascade Flutter Using a Coupled Method. J. Propuls. Power 2007, 23, 266–272. [Google Scholar] [CrossRef][Green Version]
- Zheng, Y.; Yang, H. Coupled fluid-structure flutter analysis of a transonic fan. Chin. J. Aeronaut. 2011, 24, 258–264. [Google Scholar] [CrossRef]
- Debrabandere, F.; Tartinville, B.; Hirsch, C.; Coussement, G. Fluid–Structure Interaction Using a Modal Approach. J. Turbomach. 2012, 134, 051–057. [Google Scholar] [CrossRef]
- Zhang, M.; Hou, A.; Zhou, S.; Yang, X. Analysis on Flutter Characteristics of Transonic Compressor Blade Row by a Fluid-Structure Coupled Method. In Proceedings of the ASME Turbo Expo 2012: Turbine Technical Conference and Exposition, Copenhagen, Denmark, 11–15 June 2012; American Society of Mechanical Engineers: New York, NY, USA, 2013; pp. 1519–1528. [Google Scholar]
- Cheng, Z.; Madsen, H.A.; Gao, Z.; Moan, T. Numerical study on aerodynamic damping of floating vertical axis wind turbines. J. Phys. Conf. Ser. 2016, 753, 102001. [Google Scholar] [CrossRef]
- Gottfried, D.A.; Fleeter, S. Aerodynamic Damping Predictions in Turbomachines Using a Coupled Fluid-Structure Model. J. Propuls. Power 2005, 21, 327–334. [Google Scholar] [CrossRef]
- Song, Z.H.; Feng, Y.C.; Wang, Y.W. The Experimental Research in the Flutter Characteristics of the BF-1 Series of Rotors. In Proceedings of the Fifth International Symposium on Unsteady Aerodynamics and Aeroelasticity of Turbomachines and Propellers, Beijing, China, 18–21 September 1989; pp. 301–311. [Google Scholar]
- ANSYS. Inc. ANSYS 17.2 Help Manual [R]; ANSYS: Canonsburg, PA, USA, 2016. [Google Scholar]
- Inman, D.J. Engineering Vibration, 4th ed.; Prentice Hall Press: Upper Saddle River, NJ, USA, 2013; pp. 215–220. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Flow (kg/s) | Ratio of Total Pressure | Rotating Speed (r/min) | Blade Number | Relative Mach Number of Blade Tip |
|---|---|---|---|---|
| 12.93 | 1.25 | 16,500 | 34 | 1.08 |
| Density (kg/m3) | Young’s Modulus (pa) | Poisson’s Ratio |
|---|---|---|
| 7800 | 2.2 × 1011 | 0.3 |
| Mode | Calculated Static Frequency (Hz) | Experimental Static Frequency (Hz) | Calculated Dynamic Frequency (Hz) | Error of Static Frequency (%) |
|---|---|---|---|---|
| 1 | 355.8 | 363.0 | 566.3 | 1.99 |
| 2 | 1470.9 | 1489.5 | 1664.7 | 1.25 |
| 3 | 2112.1 | 2149 | 2160.2 | 1.72 |
| 0 | 0 | 0 | |||
|---|---|---|---|---|---|
| 0.0317 | 0.0109 | 0.0084 | 0.0087 | 0.0073 | |
| 0.0328 | 0.0121 | 0.0097 | 0.0100 | 0.0086 | |
| 0.0011 | 0.0013 | 0.0013 | 0.0013 | 0.0013 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yang, X.; Hou, A.; Chen, Y.; Li, M. Aerodynamic Damping Prediction for Turbomachinery Based on Fluid-Structure Interaction with Modal Excitation. Appl. Sci. 2019, 9, 4411. https://doi.org/10.3390/app9204411
Li J, Yang X, Hou A, Chen Y, Li M. Aerodynamic Damping Prediction for Turbomachinery Based on Fluid-Structure Interaction with Modal Excitation. Applied Sciences. 2019; 9(20):4411. https://doi.org/10.3390/app9204411
Chicago/Turabian StyleLi, Jianxiong, Xiaodong Yang, Anping Hou, Yingxiu Chen, and Manlu Li. 2019. "Aerodynamic Damping Prediction for Turbomachinery Based on Fluid-Structure Interaction with Modal Excitation" Applied Sciences 9, no. 20: 4411. https://doi.org/10.3390/app9204411
APA StyleLi, J., Yang, X., Hou, A., Chen, Y., & Li, M. (2019). Aerodynamic Damping Prediction for Turbomachinery Based on Fluid-Structure Interaction with Modal Excitation. Applied Sciences, 9(20), 4411. https://doi.org/10.3390/app9204411