Separated Phase–Current Controls Using Inverter-Based DGs to Mitigate Effects of Fault Current Contribution from Synchronous DGs on Recloser–Fuse


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. Dynamic Model of Recloser–Fuse
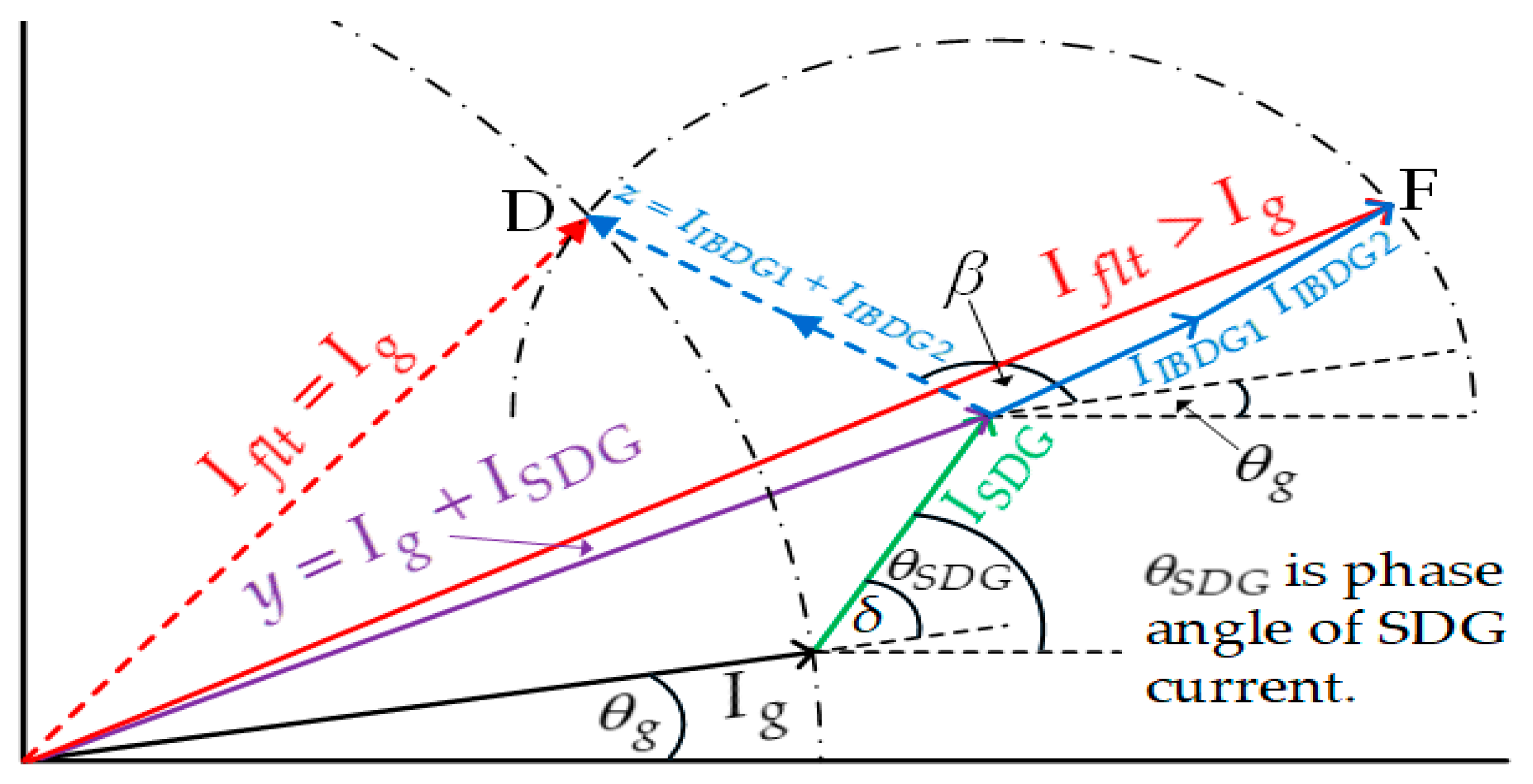
3. Modified Current Phase Angle Calculation
4. Separated Phase–Current Control Using IBDGs
5. Delay Caused by Using PMUs
6. Grid and SDG Current Estimations
6.1. Fault in the Section behind the SDG (Point C)
6.2. Fault in the Section between IBDG1 and the SDG (Point B)
6.3. Fault in the Section in Front of IBDG1 (Point A)
7. Simulation Assessment
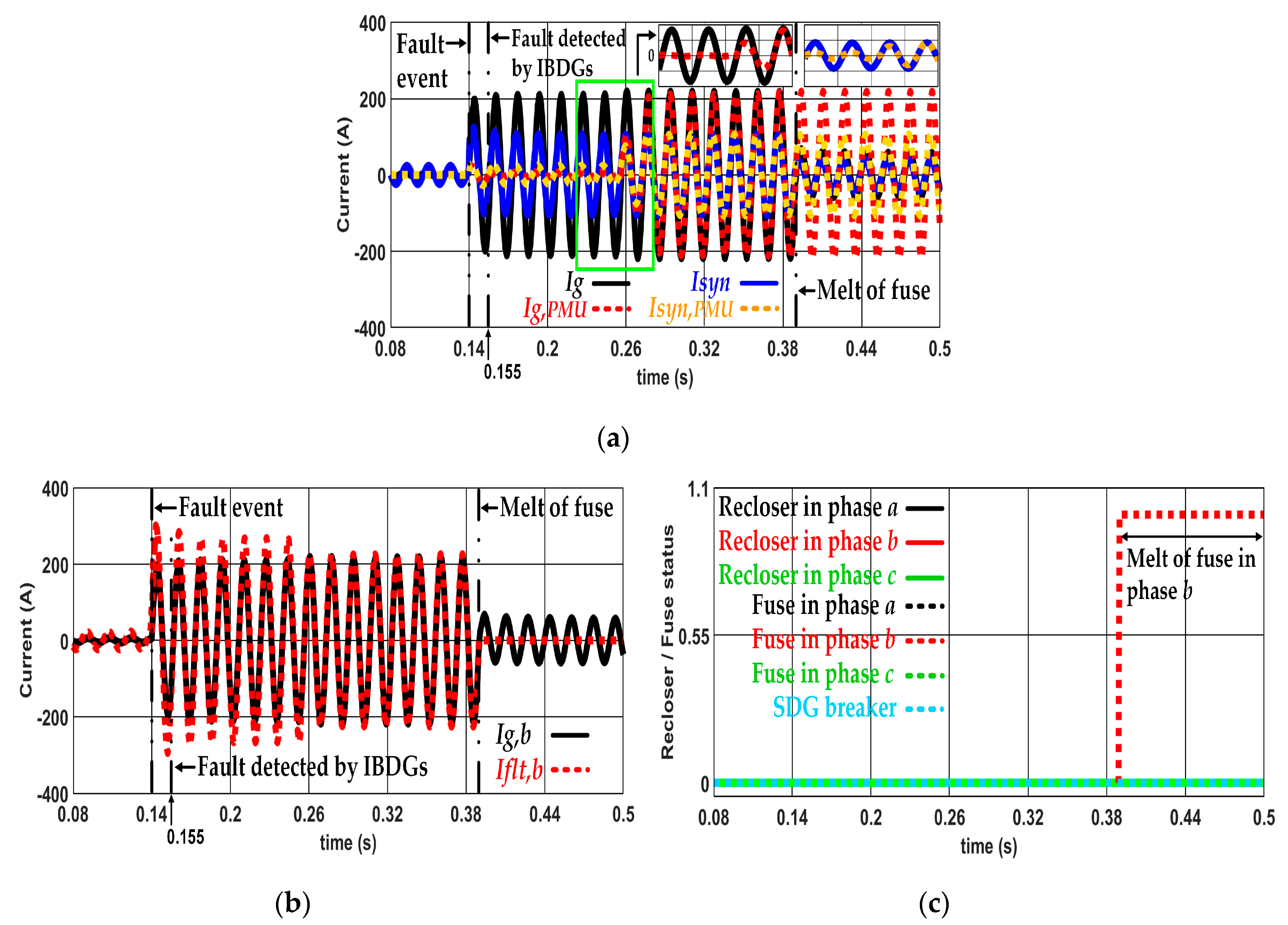
7.1. Effects of Delay Caused by PMUs
7.2. Performance of the Separated Phase–Current Controls Using IBDGs
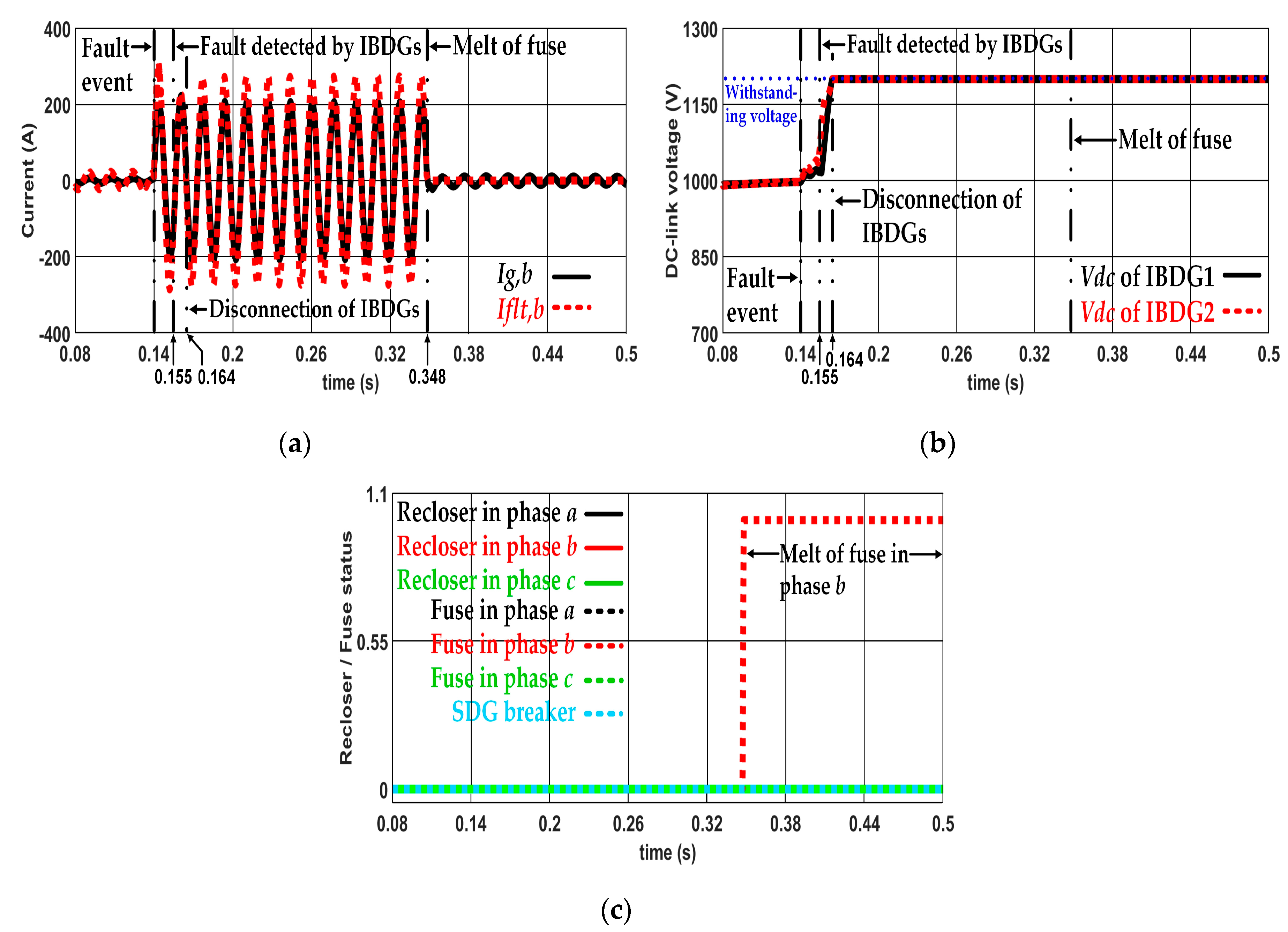
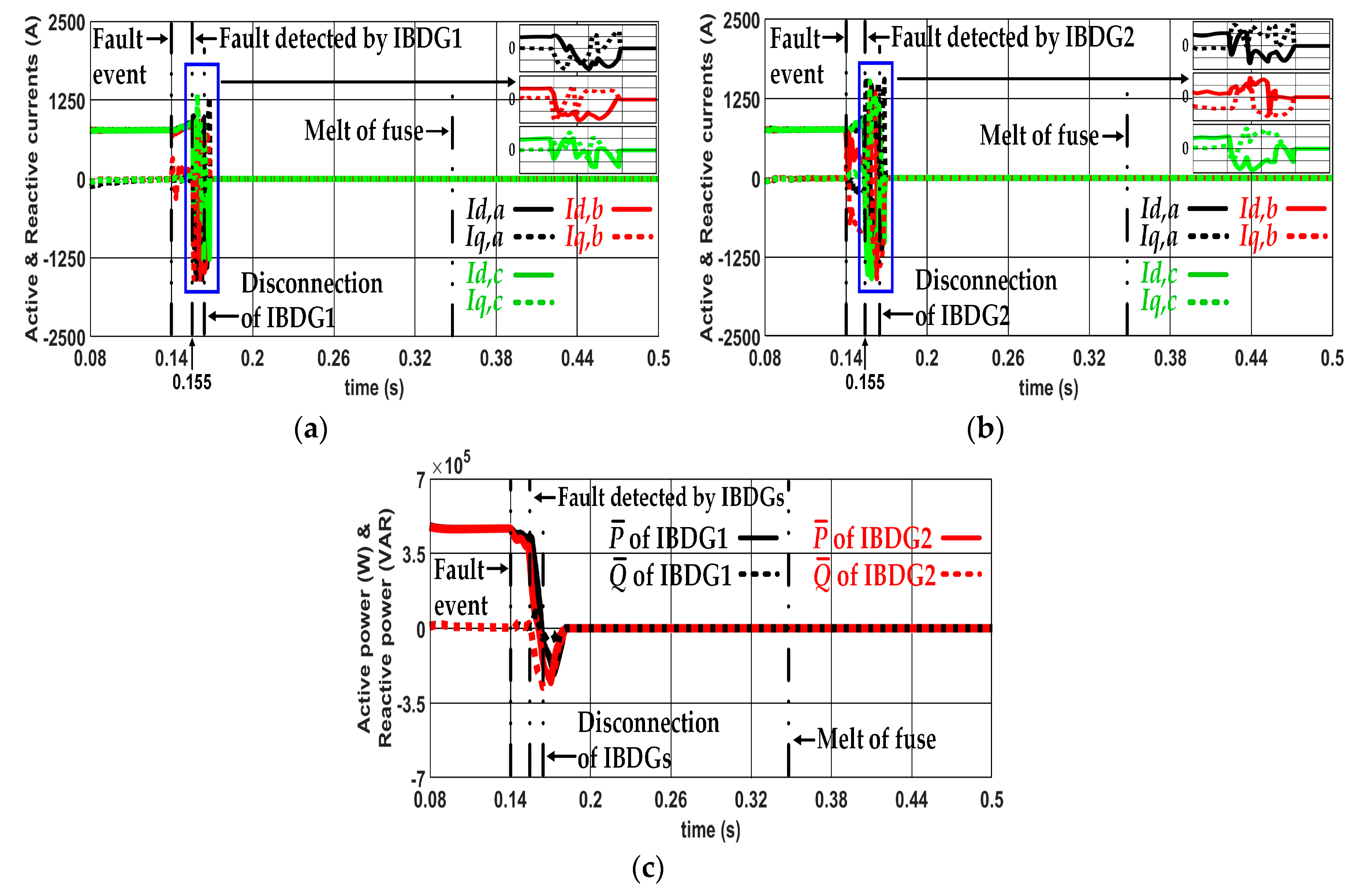
7.2.1. Temporary SLG Fault
7.2.2. Temporary LL Fault
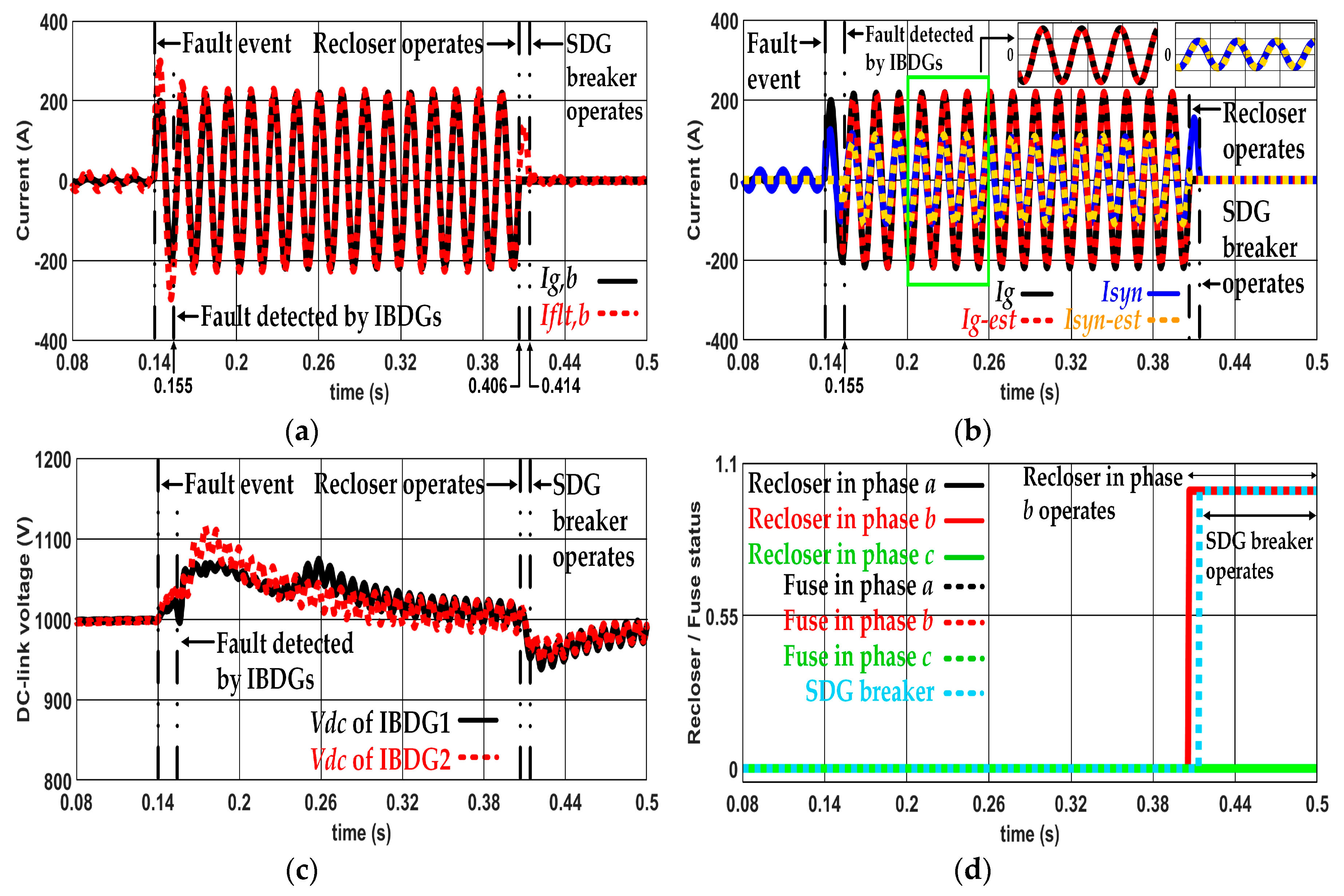
7.2.3. Permanent SLG Fault
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Strezoski, L.V.; Prica, M.D. Short-Circuit Analysis in Large-Scale Distribution Systems with High Penetration of Distributed Generators. IEEE/CAA J. Autom. Sin. 2017, 4, 243–251. [Google Scholar] [CrossRef]
- Girgis, A.; Brahma, S. Effect of Distributed Generation on Protective Device Coordination in Distribution System. In Proceedings of the 2001 Large Engineering Systems Conference on Power Engineering, Halifax, NS, Canada, 11–13 July 2001. [Google Scholar]
- Gers, J.M.; Holmes, E.J. Protection of Electricity Distribution Networks, 3rd ed.; IET: London, UK, 2011. [Google Scholar]
- Chaitusaney, S.; Yokoyama, A. Prevention of Reliability Degradation from Recloser-Fuse Miscoordination Due To Distributed Generation. IEEE Trans. Power Deliv. 2008, 23, 2545–2554. [Google Scholar] [CrossRef]
- Abdel-Ghany, H.A.; Azmy, A.M.; Elkalashy, N.I.; Rashad, E.M. Optimizing DG Penetration in Distribution Networks Concerning Protection Schemes and Technical Impact. Elect. Power Syst. Res. 2015, 128, 113–122. [Google Scholar] [CrossRef]
- Shah, P.H.; Bhalja, B.R. New Adaptive Digital Relaying Scheme to Tackle Recloser-Fuse Miscoordination during Distributed Generation Interconnections. IET Gener. Transm. Distrib. 2014, 8, 682–688. [Google Scholar] [CrossRef]
- Jamali, S.; Borhani-Bahabadi, H. Recloser Time-Current-Voltage Characteristic for Fuse Saving in Distribution Networks with DG. IET Gener. Transm. Distrib. 2017, 11, 272–279. [Google Scholar] [CrossRef]
- Liu, Z.; Su, C.; Høidalen, H.K.; Chen, Z. A Multiagent System-Based Protection and Control Scheme for Distribution System with Distributed-Generation Integration. IEEE Trans. Power Deliv. 2017, 32, 536–545. [Google Scholar] [CrossRef]
- Park, W.J.; Sung, B.C.; Park, J.W. The Effect of SFCL on Electric Power Grid with Wind-Turbine Generation System. IEEE Trans. Appl. Supercond. 2010, 20, 1177–1181. [Google Scholar] [CrossRef]
- Fereidouni, A.R.; Vahidi, B.; Mehr, T.H. The Impact of Solid State Fault Current Limiter on Power Network with Wind-Turbine Power Generation. IEEE Trans. Smart Grid 2013, 4, 1188–1196. [Google Scholar] [CrossRef]
- Yazdanpanahi, H.; Xu, W.; Li, Y.W. A Novel Fault Current Control Scheme to Reduce Synchronous DG’s Impact on Protection Coordination. IEEE Trans. Power Deliv. 2014, 29, 542–551. [Google Scholar] [CrossRef]
- Ustun, T.S.; Ozansoy, C.; Zayegh, A. A Central Microgrid Protection System for Networks with Fault Current Limiters. In Proceedings of the 2011 10th International Conference on Environment and Electrical Engineering, Rome, Italy, 8–11 May 2011. [Google Scholar]
- Liang, Z.; Lin, X.; Kang, Y.; Gao, B.; Lei, H. Short Circuit Current Characteristics Analysis and Improved Current Limiting Strategy for Three-phase Three-leg Inverter under Asymmetric Short Circuit Fault. IEEE Trans. Power Electron. 2018, 33, 7214–7228. [Google Scholar] [CrossRef]
- Yazdanpanahi, H.; Li, Y.W.; Xu, W. A New Control Strategy to Mitigate the Impact of Inverter-Based DGs on Protection System. IEEE Trans. Smart Grid 2012, 3, 1427–1436. [Google Scholar] [CrossRef]
- Rajaei, N.; Ahmed, M.H.; Salama, M.M.A.; Varma, R.K. Fault Current Management Using Inverter-Based Distributed Generators in Smart Grids. IEEE Trans. Smart Grid 2014, 5, 2183–2193. [Google Scholar] [CrossRef]
- Kou, W.; Wei, D. Fault Ride Through Strategy of Inverter-Interfaced Microgrids Embedded in Distributed Network Considering Fault Current Management. Sustain. Energy Grids Netw. 2018, 15, 43–52. [Google Scholar] [CrossRef]
- Ackermann, T.; Knyazkin, V. Interaction between Distributed Generation and the Distribution Network: Operation Aspects. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exhibition, Yokohama, Japan, 6–10 October 2002. [Google Scholar]
- Rajaei, N.; Salama, M.M.A. Management of Fault Current Contribution of Synchronous DGs Using Inverter-Based DGs. IEEE Trans. Smart Grid 2015, 6, 3073–3081. [Google Scholar] [CrossRef]
- Boonyapakdee, N.; Sangswang, A.; Konghirun, M. Modified Current Phase Angle Calculation of Inverter-Based DGs for Eliminating the Effects of Fault Current Contribution from Synchronous DGs in Smart Grid. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Mirhosseini, M.; Pou, J.; Agelidis, V.G. Single- and Two-Stage Inverter-Based Grid-Connected Photovoltaic Power Plants with Ride-Through Capability under Grid Faults. IEEE Trans. Sustain. Energy 2015, 6, 1150–1159. [Google Scholar] [CrossRef]
- Chabanloo, R.M.; Abyaneh, H.A.; Agheli, A.; Rastegar, H. Overcurrent Relays Coordination Considering Transient Behaviour of Fault Current Limiter and Distributed Generation in Distribution Power Network. IET Gener. Transm. Distrib. 2011, 5, 903–911. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Inverse-Time Characteristics Equations for Overcurrent Relays; IEEE Std C37.112-2018; IEEE: Piscataway, NJ, USA, 2019; pp. 1–23. [Google Scholar]
- Tian, W.; Lei, C.; Zhang, Y.; Li, D.; Fu, R.; Winter, R. Data Analysis and Optimal Specification of Fuse Model for Fault Study in Power Systems. In Proceedings of the 2016 IEEE PES General Meeting, Boston, MA, USA, 17–21 July 2016. [Google Scholar]
- Blackburn, J.L.; Domin, T.J. Protective Relaying Principles and Applications, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Sadeghkhani, I.; Golshan, M.E.H.; Mehrizi-Sani, A.; Guerrero, J.M.; Ketabi, A. Transient Monitoring Function-Based Fault Detection for Inverter-Interfaced Microgrids. IEEE Trans. Smart Grid 2018, 9, 2097–2107. [Google Scholar] [CrossRef]
- Mishra, S.; Mishra, Y. Decoupled Controller for Single-Phase Grid Connected Rooftop PV Systems to Improve Voltage Profile in Residential Distribution Systems. IET Renew. Power Gener. 2017, 11, 370–377. [Google Scholar] [CrossRef]
- Paz, M.C.R.; Ferraz, R.G.; Bretas, A.S.; Leborgne, R.C. System Unbalance and Fault Impedance Effect on Faulted Distribution Networks. Comput. Math. Appl. 2010, 60, 1105–1114. [Google Scholar]
- IEEE. IEEE Guide for Loading Mineral-Oil-Immersed Transformers and Step-Voltage Regulators; IEEE Std C57.91-2011; IEEE: Piscataway, NJ, USA, 2012; pp. 1–106. [Google Scholar]
- Naduvathuparambil, B.; Valenti, M.C.; Feliachi, A. Communication Delays in Wide Area Measurement Systems. In Proceedings of the 34th Southeastern Symposium on System Theory, Huntsville, AL, USA, 19 March 2002. [Google Scholar]
- Musleh, A.S.; Muyeen, S.M.; Al-Durra, A.; Kamwa, I.; Masoum, M.A.S.; Islam, S. Time-Delay Analysis of Wide-Area Voltage Control Considering Smart Grid Contingences in a Real-Time Environment. IEEE Trans. Ind. Inform. 2018, 14, 1242–1252. [Google Scholar] [CrossRef]
- Stahlhut, J.W.; Browne, T.J.; Heydt, G.T.; Vittal, V. Latency Viewed as a Stochastic Process and its Impact on Wide Area Power System Control Signals. IEEE Trans. Power Syst. 2008, 23, 84–91. [Google Scholar] [CrossRef]
- Chenine, M.; Nordstrom, L. Modeling and Simulation of Wide-Area Communication for Centralized PMU-Based Applications. IEEE Trans. Power Deliv. 2011, 26, 1372–1380. [Google Scholar] [CrossRef]
- The MathWorks, Inc. User’s Guide, MATLAB&SIMULINK; The MathWorks, Inc.: Natick, MA, USA, 2019. [Google Scholar]
- Radial Test Feeders-IEEE Distribution System Analysis Subcommittee. Available online: http://sites.ieee.org/pes-testfeeders/resources/ (accessed on 1 June 2019).
- Gungor, V.C.; Lambert, F.C. A Survey on Communication Networks for Electric System Automation. Comput. Netw. 2006, 50, 877–897. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Synchrophasor Data Transfer for Power Systems; IEEE Std C37.118.2-2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–43. [Google Scholar]
- Yang, Q.; Keckalo, D.; Dolezilek, D.; Cenzon, E. Testing IEC 61850 Merging Units. In Proceedings of the 44th Annual Western Protective Relay Conference, Washington, DC, USA, 17–19 October 2017. [Google Scholar]
- Golshani, M.; Taylor, G.A.; Pisica, I. Simulation of Power System Substation Communications Architecture Based on IEC 61850 Standard. In Proceedings of the 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014. [Google Scholar]
- Nie, S.X.; Nie, Z.L.; Wu, Y.H.; Zhu, J.J. Analysis of Over-voltage of DC-link Capacitor of Solid State Power Supply in Parallel Operation. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012. [Google Scholar]
- Yao, J.; Li, H.; Chen, Z.; Xia, X.; Chen, X.; Li, Q.; Liao, Y. Enhanced Control of a DFIG-Based Wind-Power Generation System with Series Grid-Side Converter under Unbalanced Grid Voltage Conditions. IEEE Trans. Power Electron. 2013, 28, 3167–3181. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boonyapakdee, N.; Konghirun, M.; Sangswang, A. Separated Phase–Current Controls Using Inverter-Based DGs to Mitigate Effects of Fault Current Contribution from Synchronous DGs on Recloser–Fuse. Appl. Sci. 2019, 9, 4311. https://doi.org/10.3390/app9204311
Boonyapakdee N, Konghirun M, Sangswang A. Separated Phase–Current Controls Using Inverter-Based DGs to Mitigate Effects of Fault Current Contribution from Synchronous DGs on Recloser–Fuse. Applied Sciences. 2019; 9(20):4311. https://doi.org/10.3390/app9204311
Chicago/Turabian StyleBoonyapakdee, Nattapon, Mongkol Konghirun, and Anawach Sangswang. 2019. "Separated Phase–Current Controls Using Inverter-Based DGs to Mitigate Effects of Fault Current Contribution from Synchronous DGs on Recloser–Fuse" Applied Sciences 9, no. 20: 4311. https://doi.org/10.3390/app9204311
APA StyleBoonyapakdee, N., Konghirun, M., & Sangswang, A. (2019). Separated Phase–Current Controls Using Inverter-Based DGs to Mitigate Effects of Fault Current Contribution from Synchronous DGs on Recloser–Fuse. Applied Sciences, 9(20), 4311. https://doi.org/10.3390/app9204311