An Accurate Probabilistic Model for TVWS Identification

 ,
,  , ,
, ,  and
and
Abstract
:
1. Introduction
2. Background
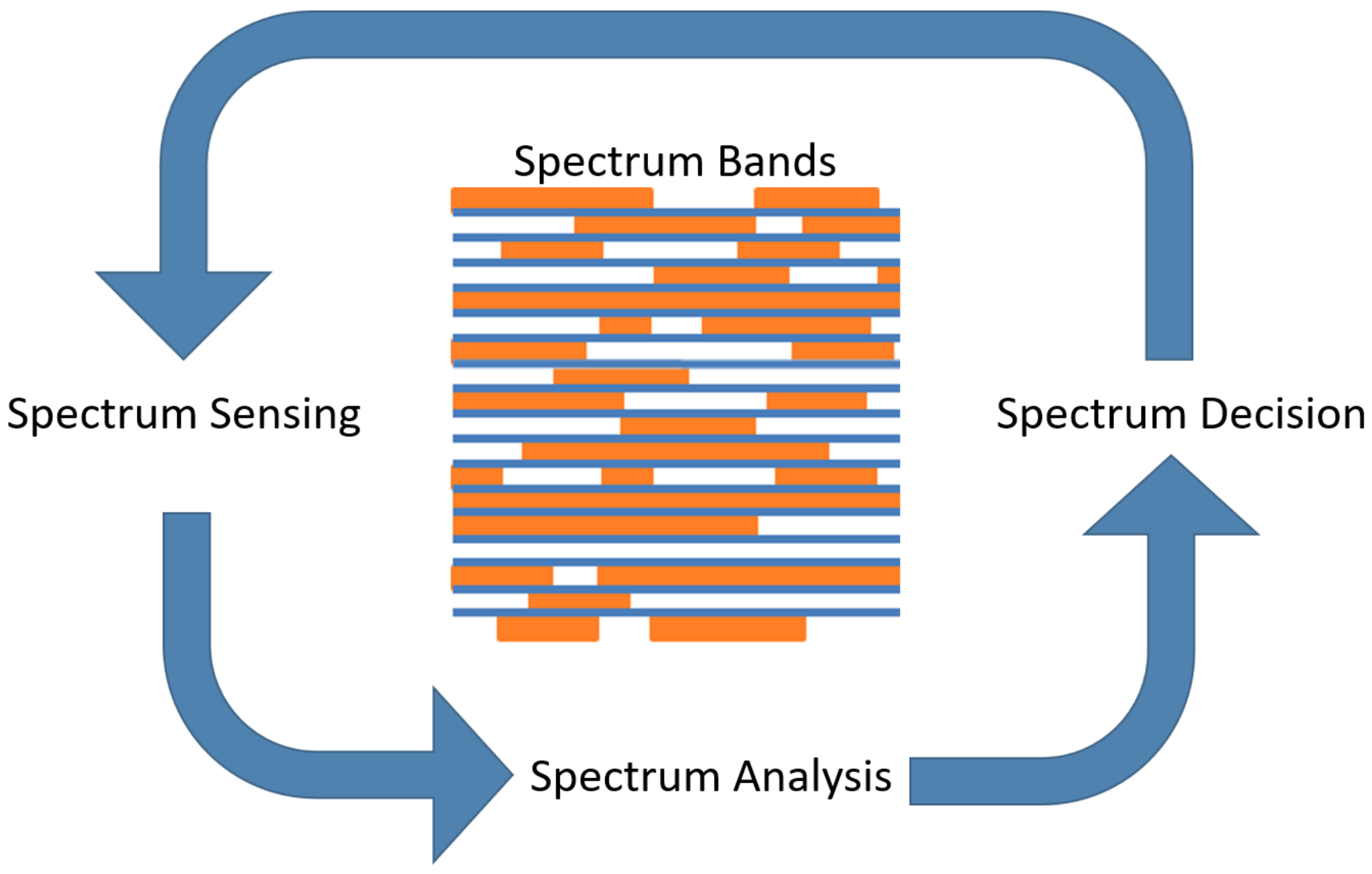
2.1. Cognitive Radio Fundamentals
2.2. TVWS Basics
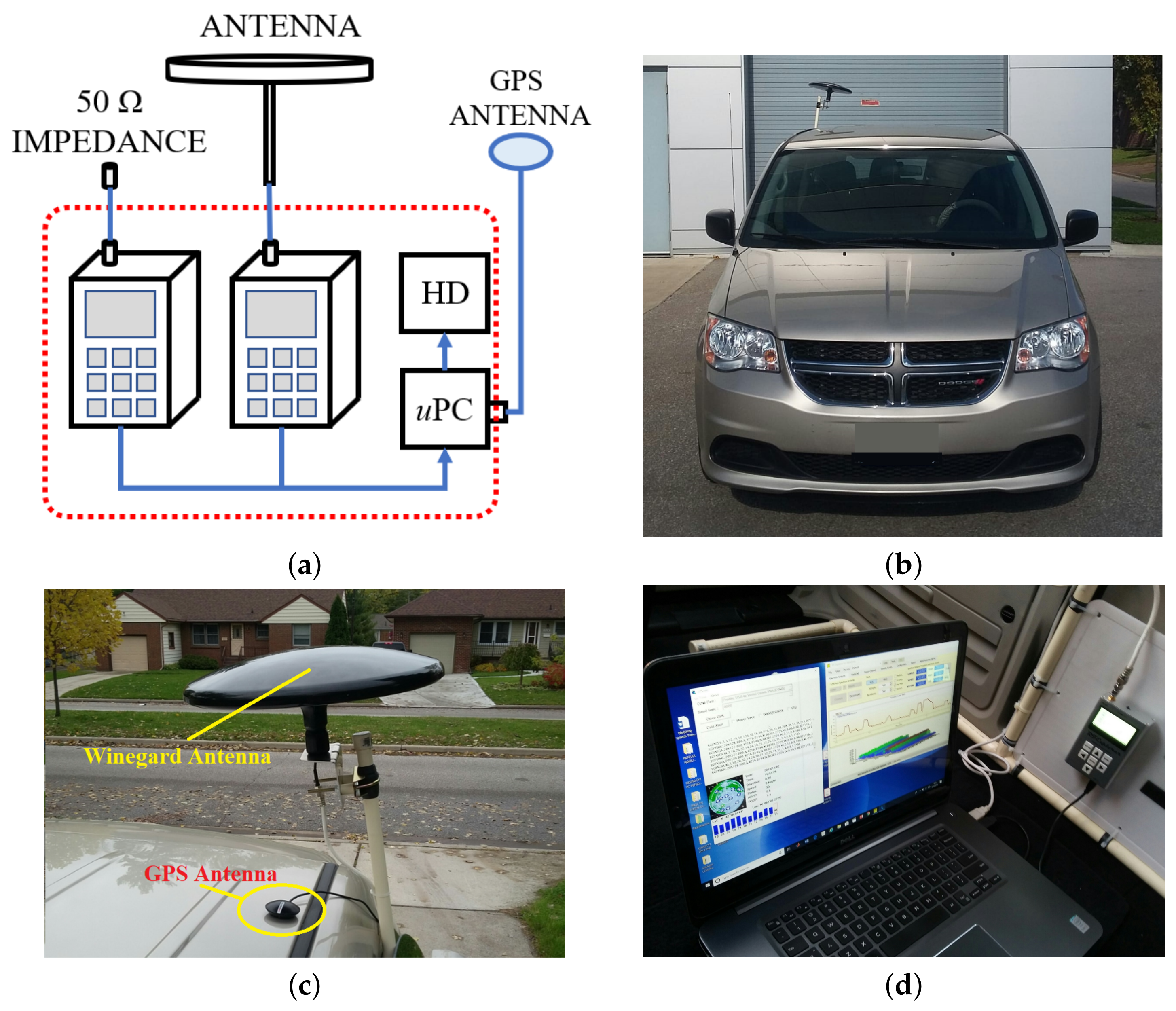
3. Prototype Description
- Frequency Range 240 MHz to 960 MHz.
- Span 0.112 MHz to 300 MHz.
- Frequency Resolution 1 KHz.
- Average Noise Level −115 dBm.
- Amplitude Resolution 0.5 dBm.
- Automatic RBW 2.6 KHz to 600 KHz.
- Frequency Range 50 KHz to 3 GHz.
- Bandwidth 500 MHz.
- Span 1 KHz to 3 GHz.
- Frequency Resolution 20 Hz to 10 MHz.
- Average Noise Level −115 dBm.
- Amplitude Resolution 0.5 dBm.
- Automatic RBW 2.6 KHz to 600 KHz.
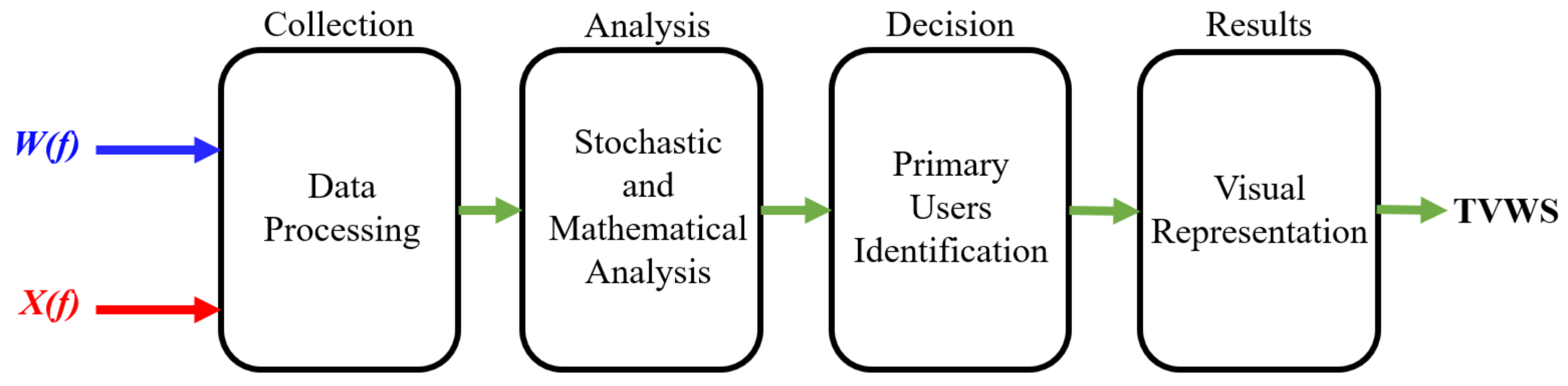
4. Proposed Probabilistic Model
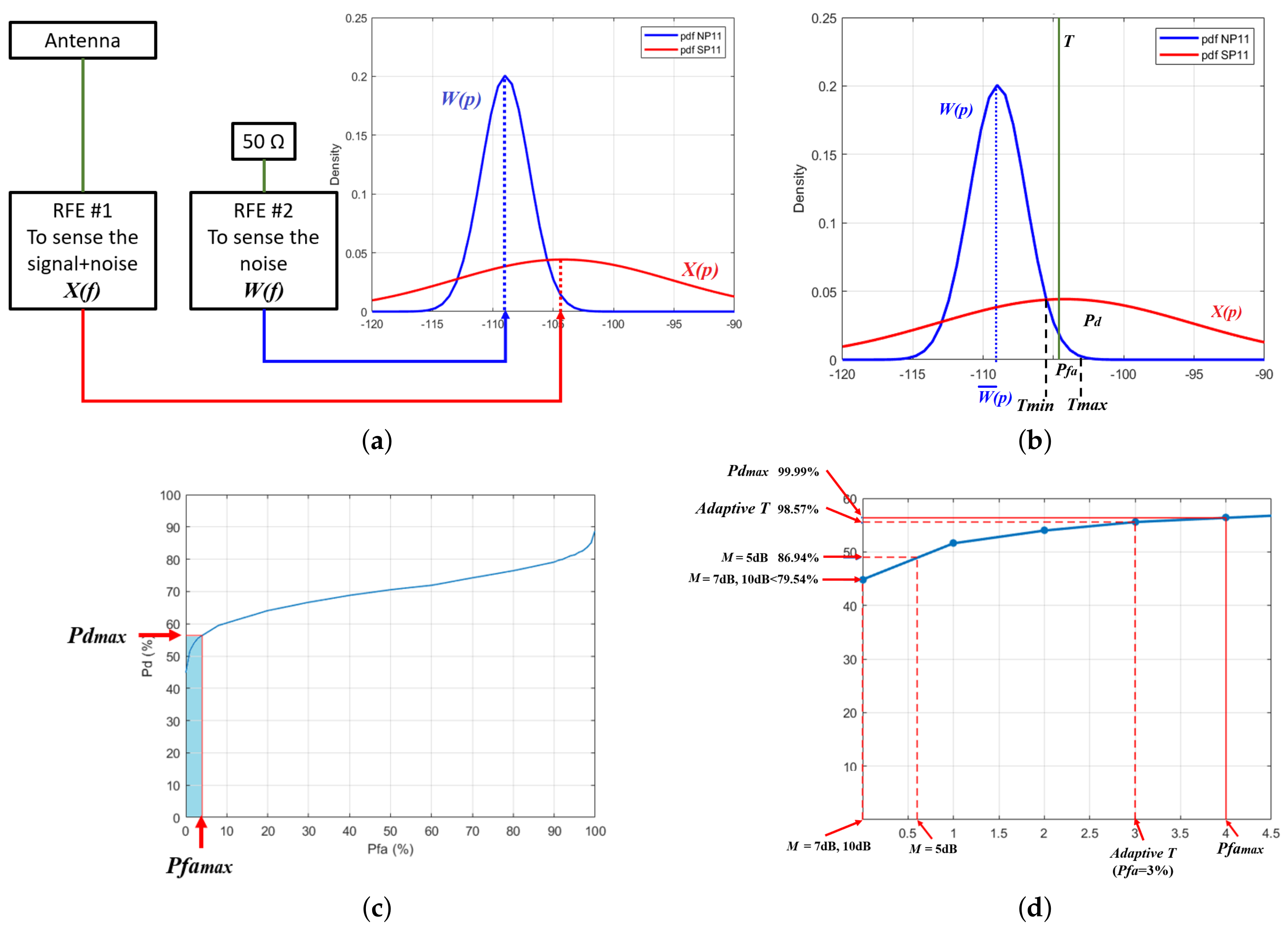
4.1. Sensing the TV Signal and the Noise
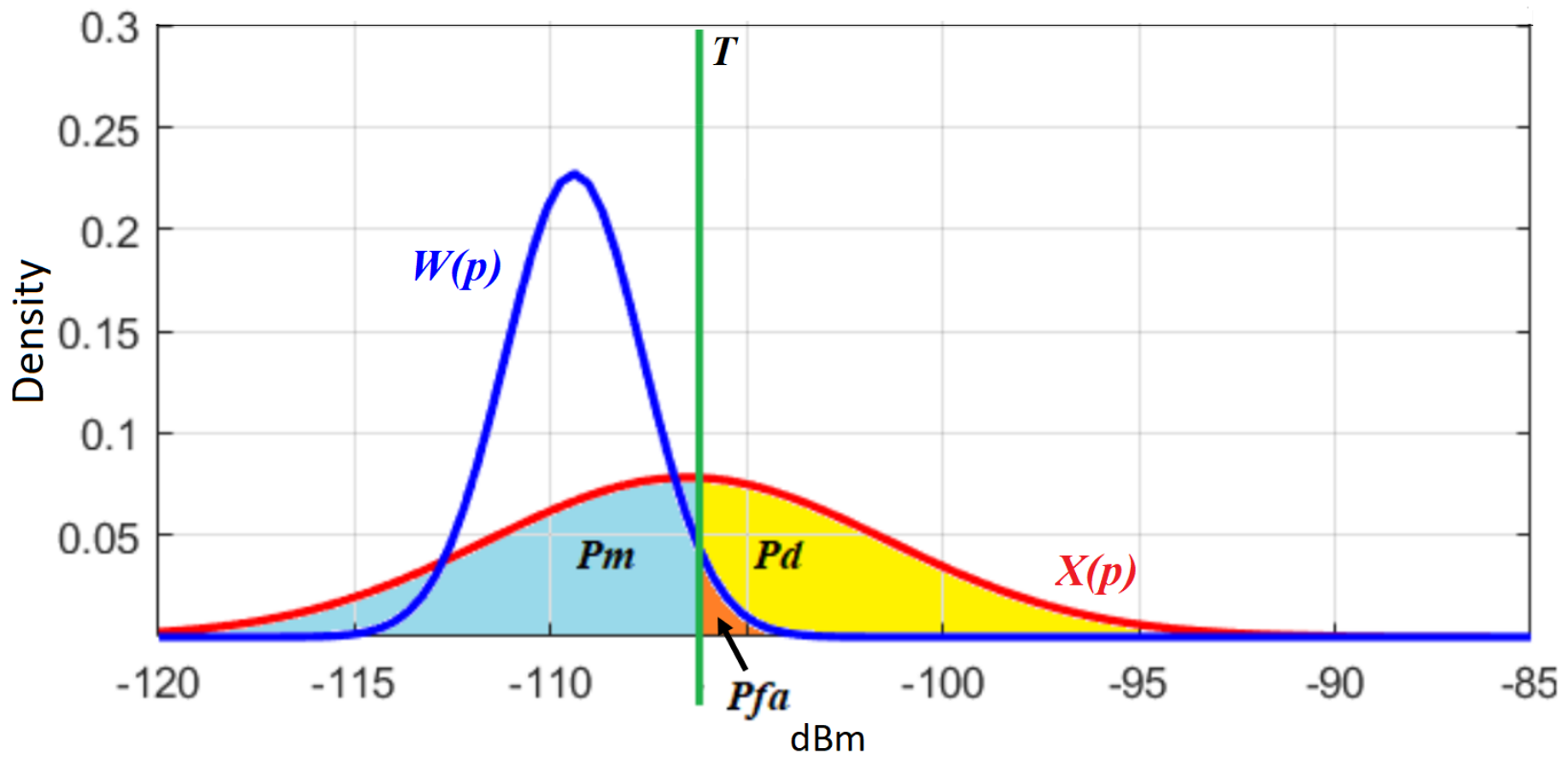
4.2. Threshold Considerations
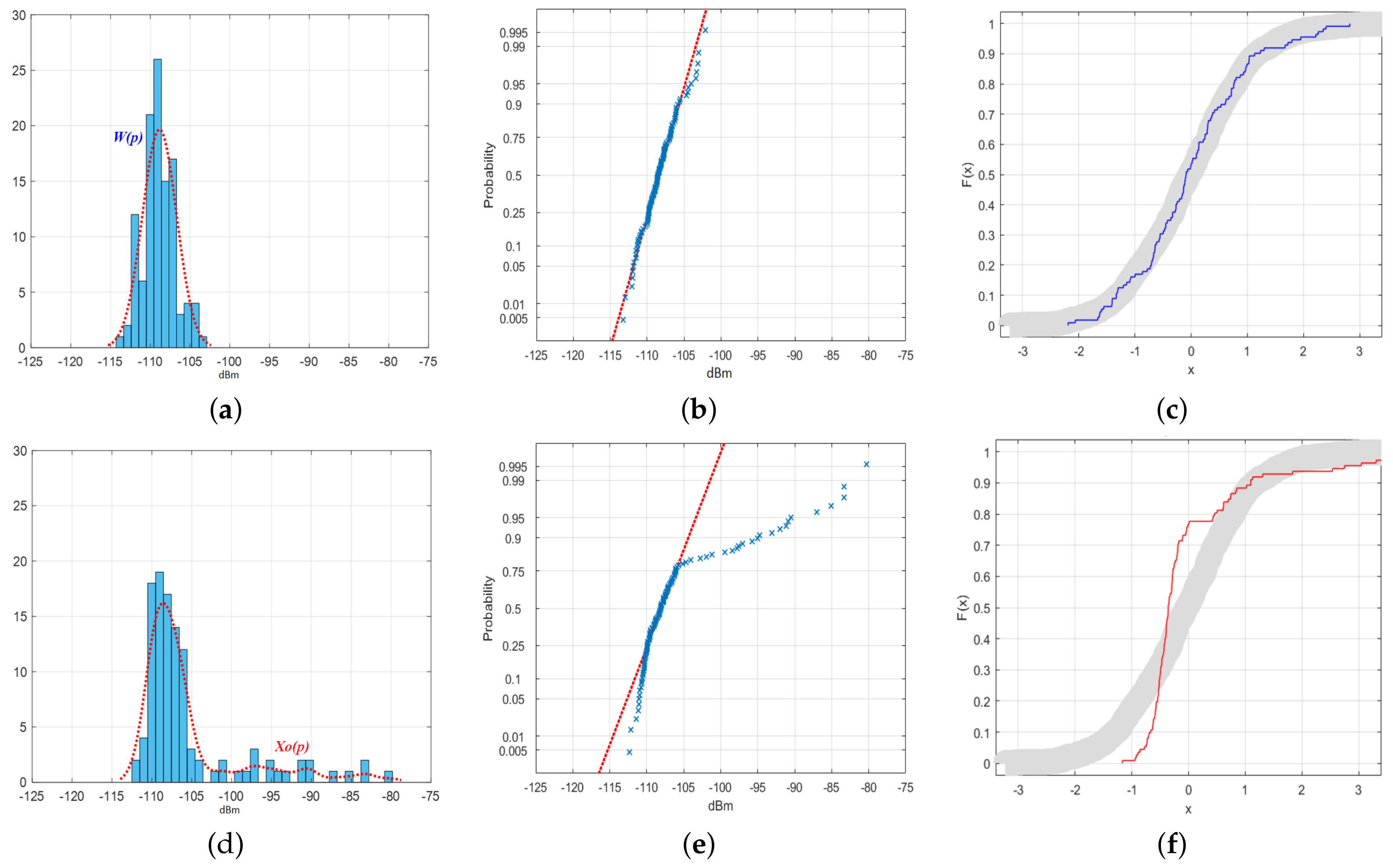
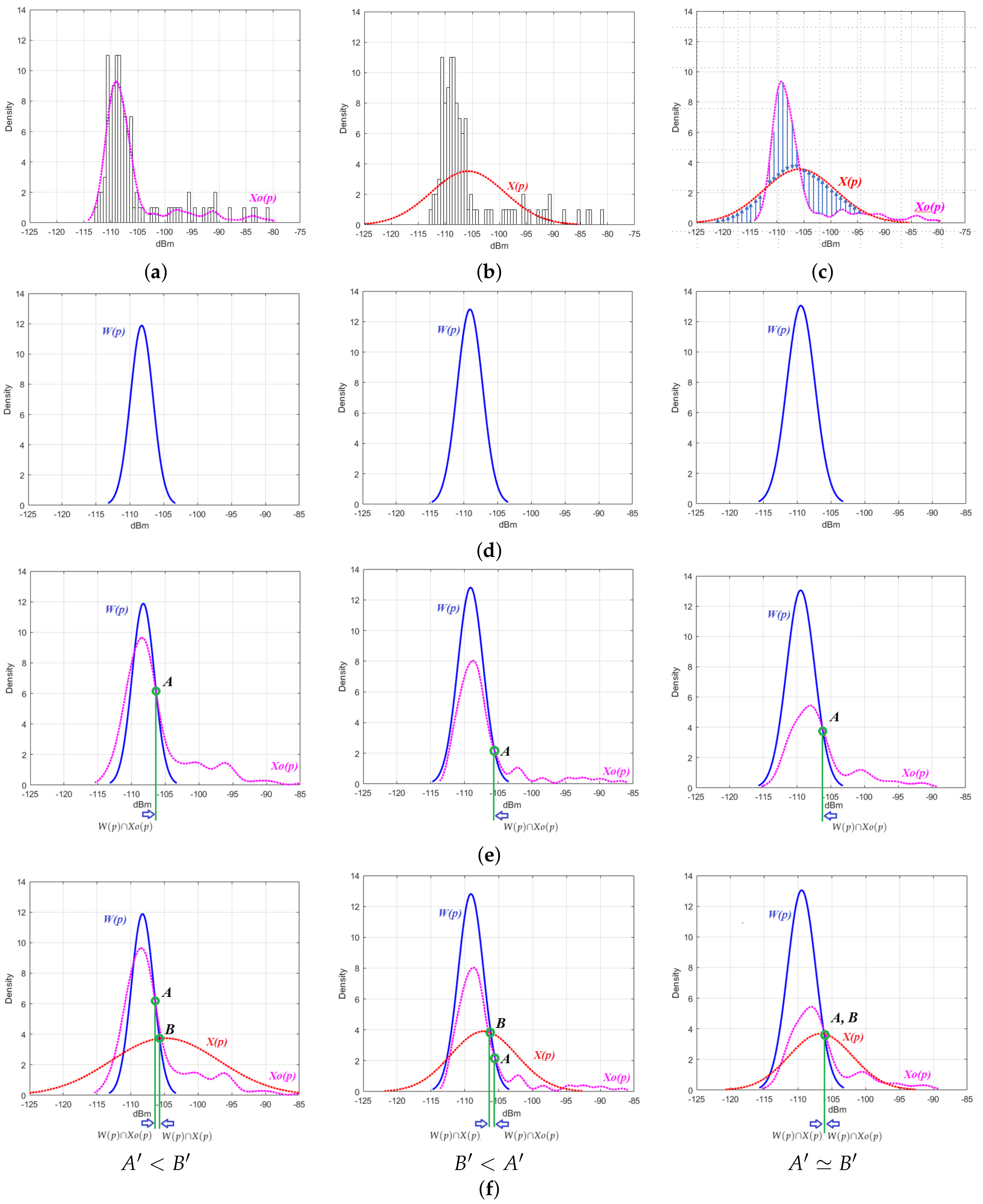
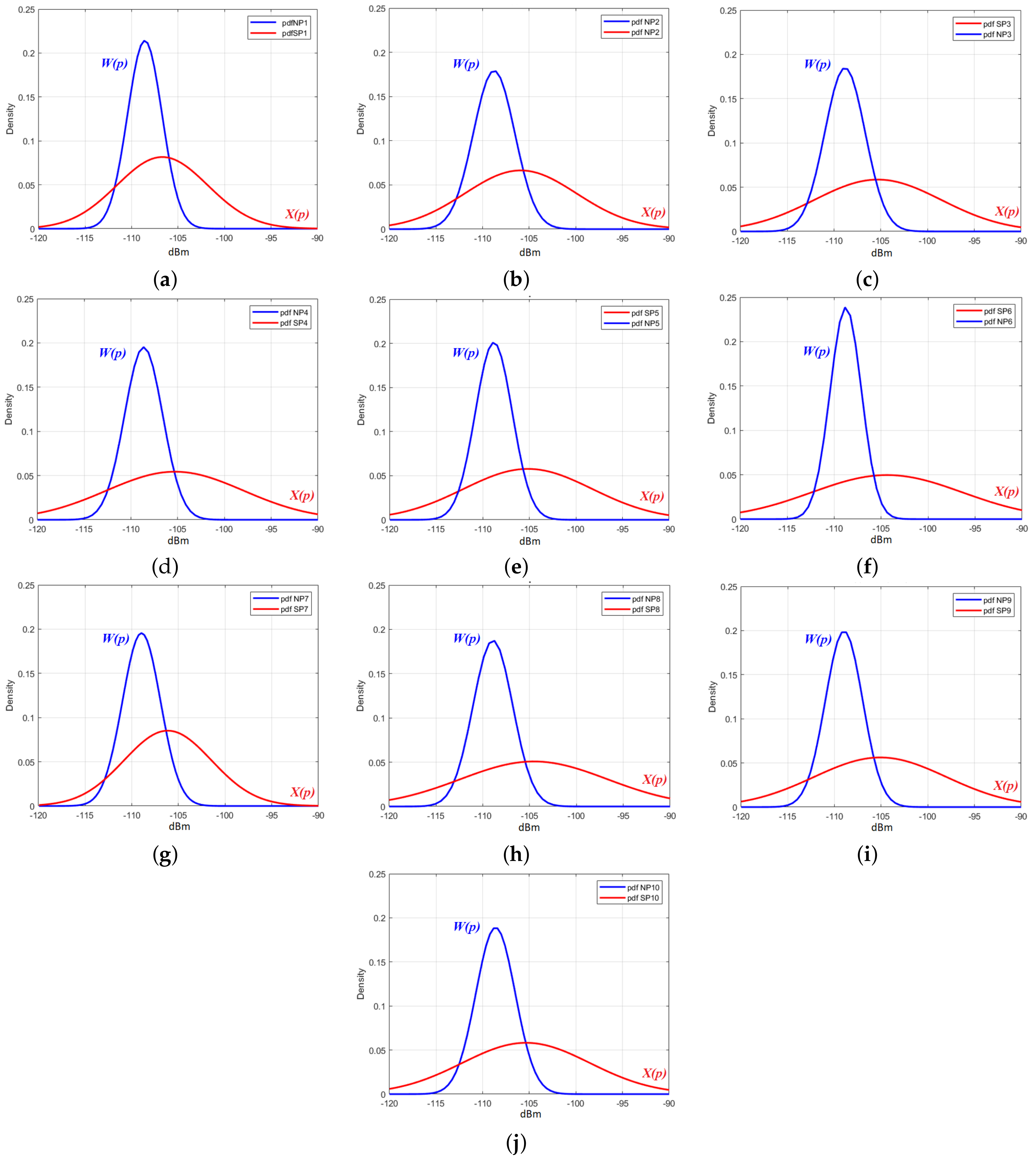
4.3. Working with Normal Distributions
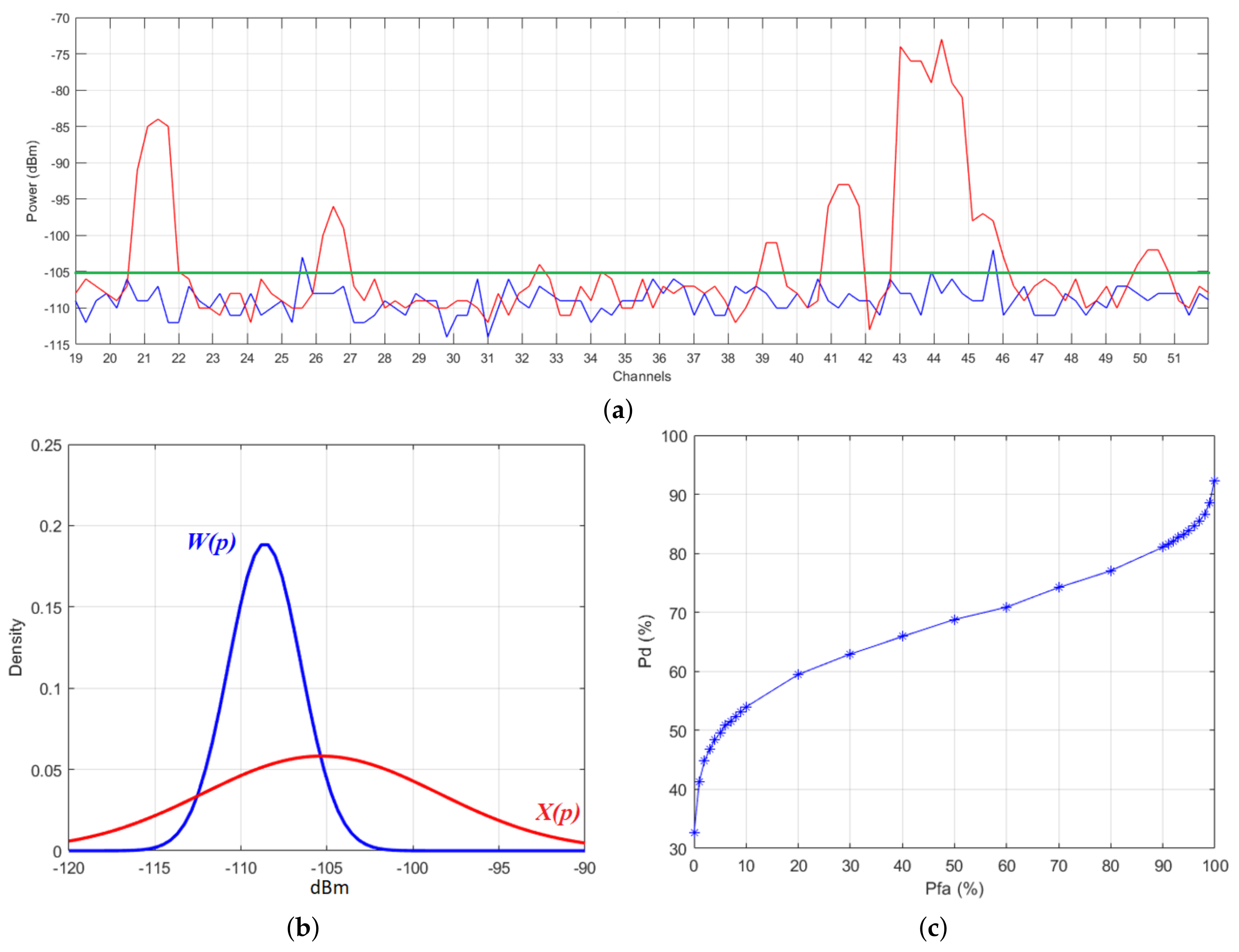
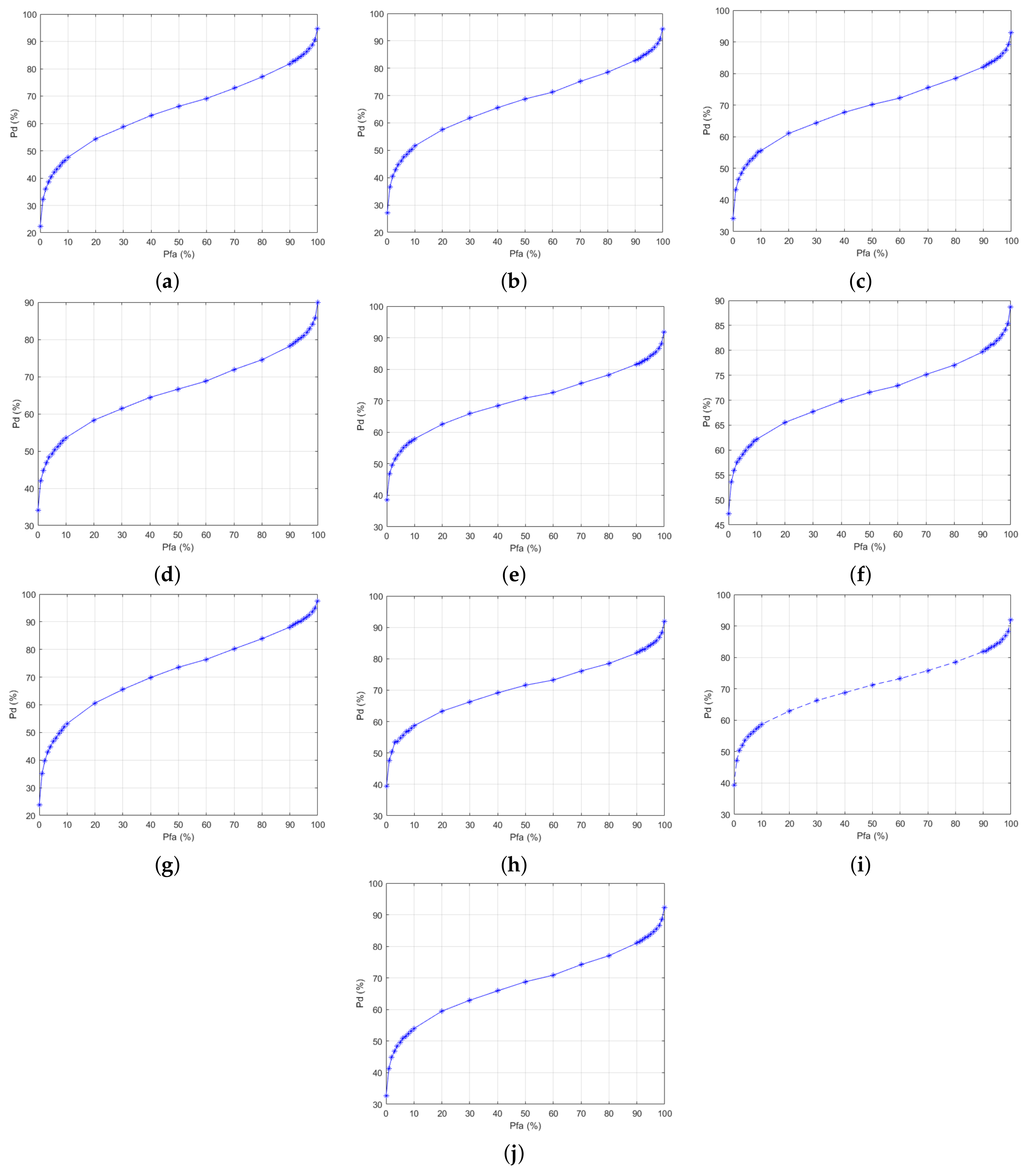
4.4. Obtaining pdf and Performance Metrics
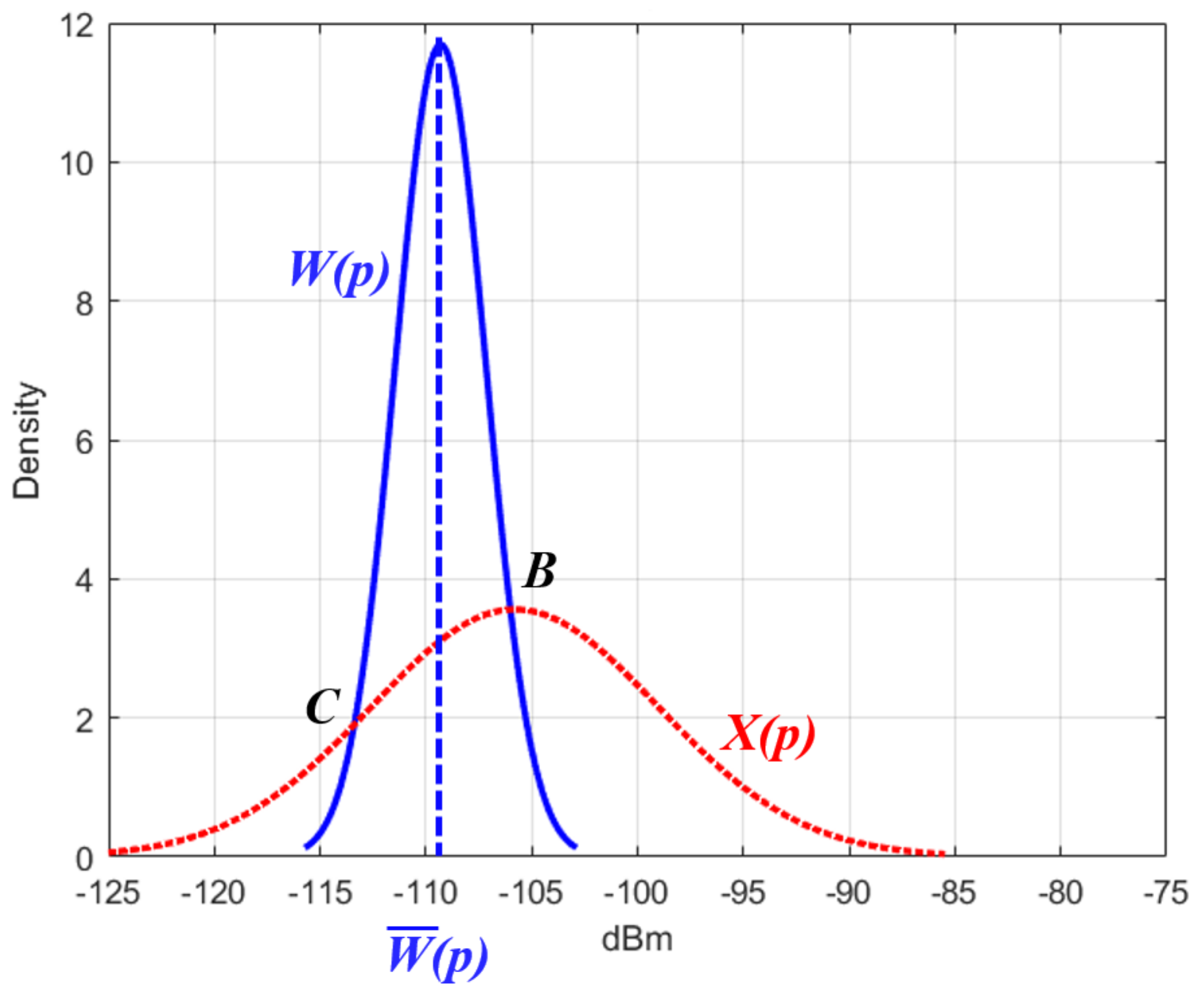
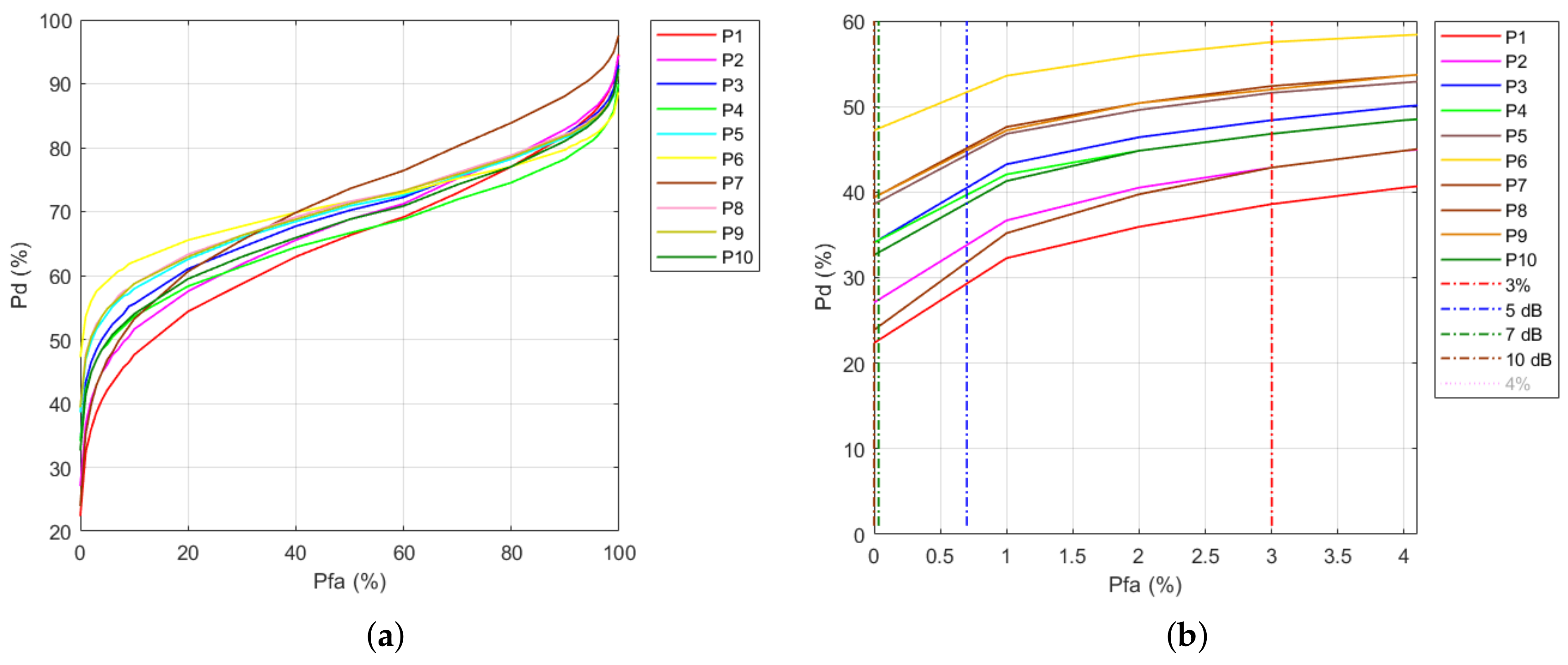
4.5. Calculation of Threshold T
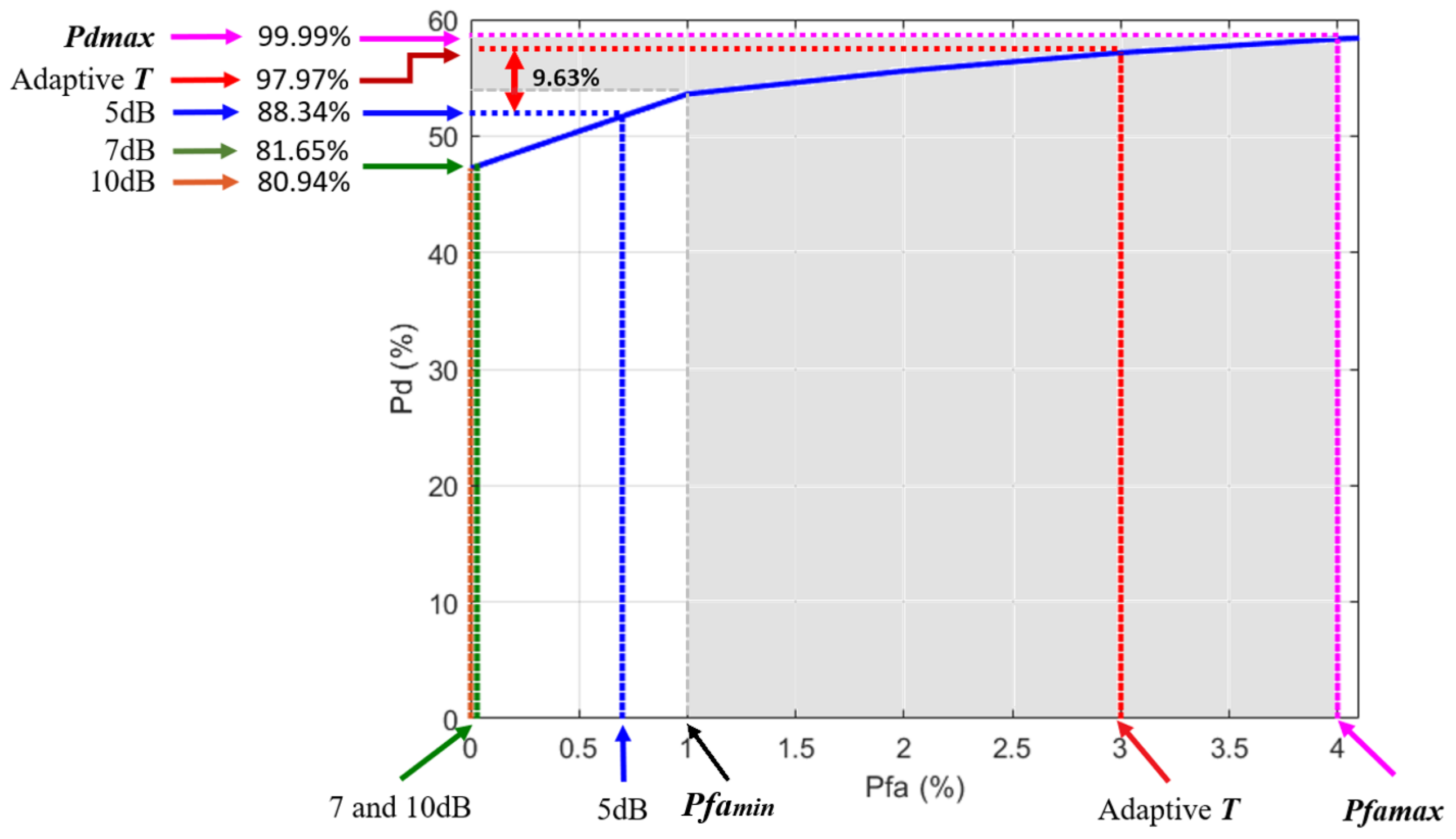
4.6. Adaptive Threshold
5. Experimental Results and Discussion
5.1. Data Characteristics
5.2. Discussing the Results
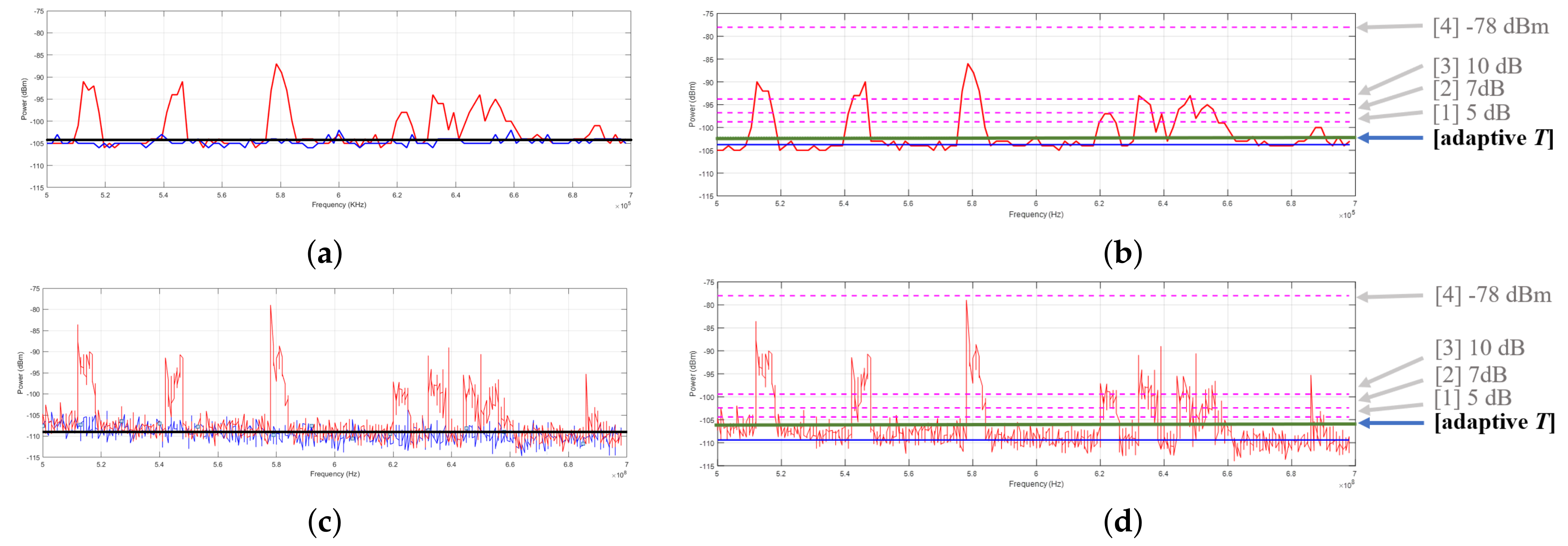
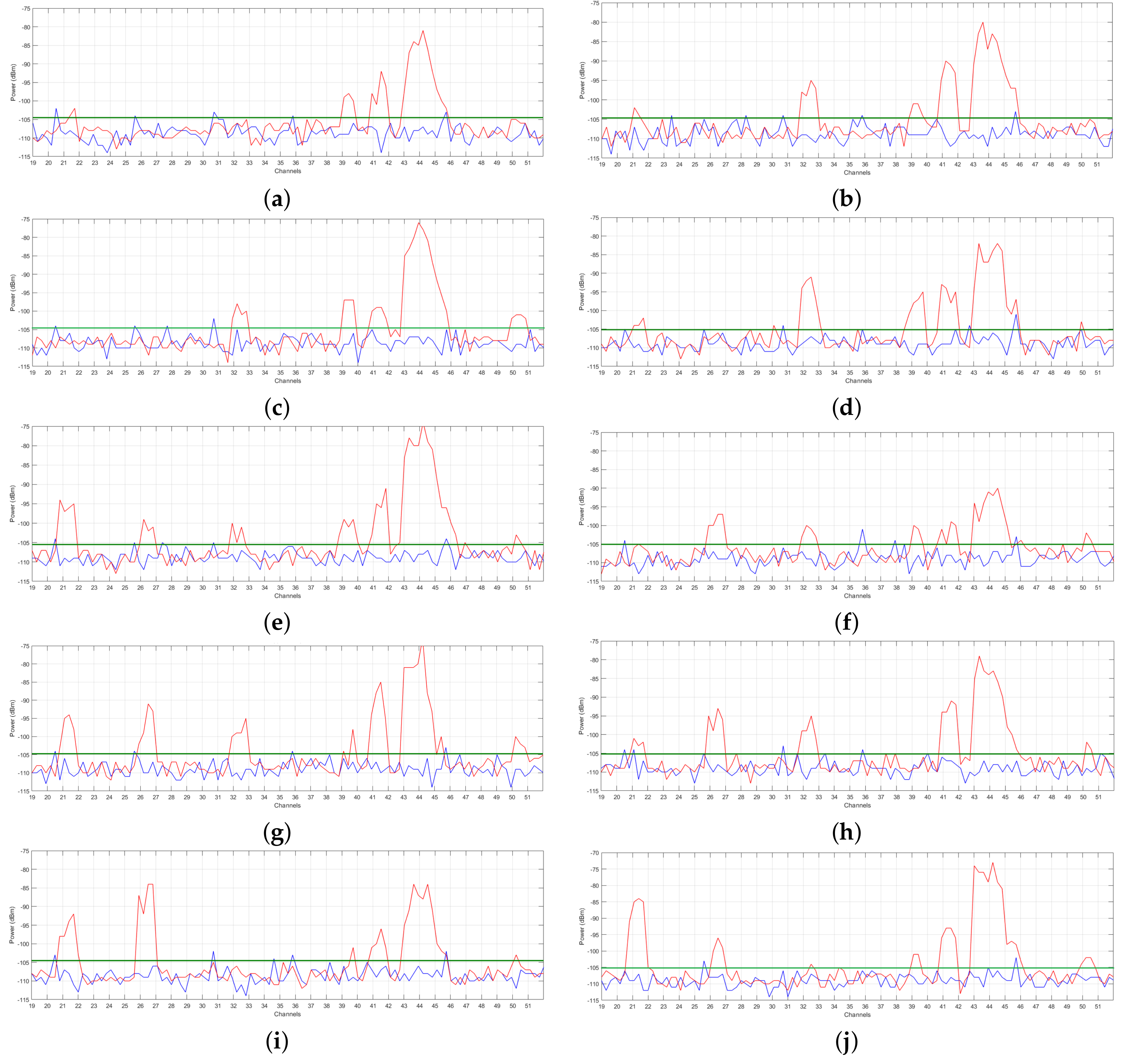
5.3. Spectrum Sensed Results
5.4. Variability of the Sensed Signals
5.5. Processing Time
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Liang, Y.C.; Chen, K.C.; Li, G.Y.; Mahonen, P. Cognitive radio networking and communications: An overview. IEEE Trans. Veh. Technol. 2011, 60, 3386–3407. [Google Scholar] [CrossRef]
- Datla, D.; Wyglinski, A.M.; Minden, G.J. A spectrum surveying framework for dynamic spectrum access networks. IEEE Trans. Veh. Technol. 2009, 58, 4158–4168. [Google Scholar] [CrossRef]
- Liu, Y.; Ding, Z.; Elkashlan, M.; Yuan, J. Nonorthogonal multiple access in large-scale underlay cognitive radio networks. IEEE Trans. Veh. Technol. 2016, 65, 10152–10157. [Google Scholar] [CrossRef]
- Brown, T.X.; Pietrosemoli, E.; Zennaro, M.; Bagula, A.; Mauwa, H.; Nleya, S.M. A survey of TV white space measurements. In International Conference on e-Infrastructure and e-Services for Developing Countries; Springer: Berlin/Heidelberg, Germany, 2014; pp. 164–172. [Google Scholar]
- Shellhammer, S.J. Spectrum Sensing in IEEE 802.22. In Proceedings of the IAPR Workshop on Cognitive Information Processing, Santorini, Greece, 9–10 June 2008; pp. 9–10. [Google Scholar]
- Mitola, J.; Maguire, G.Q. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Cordeiro, C.; Challapali, K.; Birru, D.; Shankar, S. IEEE 802.22: An introduction to the first wireless standard based on cognitive radios. J. Commun. 2006, 1, 38–47. [Google Scholar]
- Rusch, L.A. Indoor wireless communications: Capacity and coexistence on the unlicensed bands. Int. Technol. J. 2001, 3, 2001. [Google Scholar]
- IEEE. IEEE 802.22 Working Group on Wireless Regional Area Networks. Available online: http://www.ieee802.org/22/ (accessed on 31 March 2019).
- Zeng, Y.; Liang, Y.C. Eigenvalue-based spectrum sensing algorithms for cognitive radio. IEEE Trans. Commun. 2009, 57, 1784–1793. [Google Scholar] [CrossRef]
- Pietrosemoli, E.; Zennaro, M. TV White Spaces—A Pragmatic Approach. In Proceedings of the Sixth International Conference on Information and Communication Technologies and Development, Cape Town, South Africa, 7–10 December 2013. [Google Scholar]
- Chen, Y.; Oh, H.S. A survey of measurement-based spectrum occupancy modeling for cognitive radios. IEEE Commun. Surv. Tutor. 2016, 18, 848–859. [Google Scholar] [CrossRef]
- Manesh, M.R.; Subramaniam, S.; Reyes, H.; Kaabouch, N. Real-time spectrum occupancy monitoring using a probabilistic model. Comput. Netw. 2017, 124, 87–96. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. NeXt generation/dynamic spectrum access/cognitive radio wireless networks: A survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- Federal Communications Commission (FCC). Docket No 03-222 Notice of Proposed Rule Making and Order. Available online: https://web.cs.ucdavis.edu/~liu/289I/Material/FCC-03-322A1.pdf (accessed on 26 September 2019).
- Jing, X.; Raychaudhuri, D. Spectrum co-existence of IEEE 802.11 b and 802.16 a networks using the CSCC etiquette protocol. In Proceedings of the First IEEE International Symposium on New Frontiers in Spectrum Access Networks, Baltimore MD, USA, 8–11 November 2005; pp. 243–250. [Google Scholar]
- Akhtar, F.; Rehmani, M.H.; Reisslein, M. White space: Definitional perspectives and their role in exploiting spectrum opportunities. Telecommun. Policy 2016, 40, 319–331. [Google Scholar] [CrossRef]
- International Telecommunications Union (ITU). Frequency Bands allocated to Terrestrial Broadcasting Services. Available online: https://www.itu.int/en/ITU-R/terrestrial/broadcast/Pages/Bands.aspx (accessed on 26 September 2019).
- Corral-De-Witt, D.; Younan, A.; Fatima, A.; Matamoros, J.; Awin, F.A.; Tepe, K.; Abdel-Raheem, E. Sensing tv spectrum using software defined radio hardware. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Awin, F.; Younan, A.; Corral-De-Witt, D.; Tepe, K.; Abdel-Raheem, E. Real-Time Multi-Channel TVWS Sensing Prototype Using Software Defined Radio. In Proceedings of the 2018 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Louisville, KY, USA, 6–8 December 2018; pp. 212–217. [Google Scholar]
- RF Explorer. RF Explorer Spectrum Analyzer. Available online: http://j3.rf-explorer.com/40-rfe/article/48-introducing-rf-explorer (accessed on 29 March 2019).
- Tektronix. MDO 4000 Series Manual. Available online: https://www.tek.com/oscilloscopes/mdo4000-manual/mdo4000-series-0 (accessed on 29 March 2019).
- Lekomtcev, D.; Maršálek, R. Comparison of 802.11 af and 802.22 standards–physical layer and cognitive functionality. Elektro Revue 2012, 3, 12–18. [Google Scholar]
- Harrold, T.; Cepeda, R.; Beach, M. Long-term measurements of spectrum occupancy characteristics. In Proceedings of the 2011 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Aachen, Germany, 3–6 May 2011; pp. 83–89. [Google Scholar]
- Valenta, V.; Maršálek, R.; Baudoin, G.; Villegas, M.; Suarez, M.; Robert, F. Survey on spectrum utilization in Europe: Measurements, analyses and observations. In Proceedings of the 2010 Fifth International Conference on Cognitive Radio Oriented Wireless Networks and Communications, Cannes, France, 16–18 June 2010; pp. 1–5. [Google Scholar]
- Qaraqe, K.A.; Celebi, H.; Gorcin, A.; El-Saigh, A.; Arslan, H.; Alouini, M.S. Empirical results for wideband multidimensional spectrum usage. In Proceedings of the 2009 IEEE 20th International Symposium on Personal, Indoor and Mobile Radio Communications, Tokyo, Japan, 13–16 September 2009; pp. 1262–1266. [Google Scholar]
- Awin, F.; Abdel-Raheem, E.; Tepe, K. Blind spectrum sensing approaches for interweaved cognitive radio system: A tutorial and short course. IEEE Commun. Surv. Tutor. 2019, 21, 238–259. [Google Scholar] [CrossRef]
- Awin, F.A.; Alginahi, Y.M.; Abdel-Raheem, E.; Tepe, K. Technical Issues on Cognitive Radio-Based Internet of Things Systems: A Survey. IEEE Access 2019, 7, 97887–97908. [Google Scholar] [CrossRef]
- Chambers, J.M. Graphical Methods for Data Analysis: 0; Chapman and Hall/CRC: Boca Raton, FL, USA, 2017. [Google Scholar]
- Massey, F.J., Jr. The Kolmogorov–Smirnov test for goodness of fit. J. Am. Stat. Assoc. 1951, 46, 68–78. [Google Scholar] [CrossRef]
- Z Table. Z Score Table. Available online: http://www.z-table.com/ (accessed on 18 April 2019).
- Brown, C.D.; Davis, H.T. Receiver operating characteristics curves and related decision measures: A tutorial. Chemom. Intell. Lab. Syst. 2006, 80, 24–38. [Google Scholar] [CrossRef]
- International Telecommunications Union ITU. Handbook Spectrum Monitoring, Chapter 3. Available online: https://extranet.itu.int/brdocsearch/R-HDB/R-HDB-23/R-HDB-23-2002/R-HDB-23-2002-OAS-PDF-E.pdf (accessed on 29 March 2019).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Frequencies | Channels | Partial BW | ITU Regions |
|---|---|---|---|---|
| Band I | 54–72 | 2 to 4 | 18 MHz | R1, R2, R3 |
| Band I (Cont.) | 76–88 | 5 to 6 | 12 MHz | R2 |
| Band III | 174–216 | 7 to 13 | 42 MHz | R1, R2, R3 |
| Band IV | 500–644 | 19 to 42 | 144 MHz | R1, R2, R3 |
| Band V | 644–698 | 43 to 51 | 54 MHz | R1, R2, R3 |
| Ord | Device | Observation |
|---|---|---|
| 1 | External Antenna | Omni, 5 MHz to 1000 MHz range |
| 2 | GPS Antenna | USB connector |
| 3 | Attached Impedance | 50 |
| 4 | RF Explorer | Sub 1 G, 240 MHz to 960 MHz range |
| 5 | Spectrum Analyzer | High accuracy, 50 KHz–3 GHz |
| 6 | Portable Computer | Hardware and software needed |
| 7 | External Hard Disk | To save readings and information |
| Trajectory | Distance in Km | Readings | Noise Samples | Signal Samples |
|---|---|---|---|---|
| T1 | 16.05 | 5417 | 612,752 | 612,752 |
| T2 | 32.45 | 10,419 | 1,166,928 | 1,166,928 |
| T3 | 31.48 | 12,924 | 1,447,488 | 1,447,488 |
| T4 | 23.22 | 7362 | 824,544 | 824,544 |
| Total | 103.20 | 36,176 | 4,051,712 | 4,051,712 |
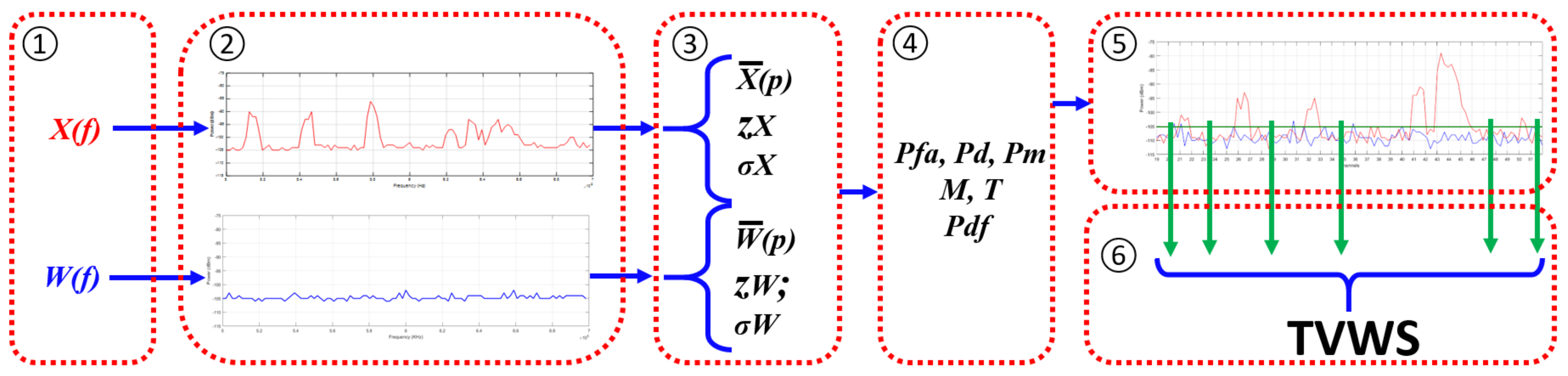
| Block | Action Performed | Observations | Time |
|---|---|---|---|
| ① | Spectrum sensing | Antenna/RFE collect samples , | 0.00 s |
| ② | Samples processing | Two RFE save samples in DB | 0.34 s |
| ③ | Statistical calculations | Matlab → calculates , , , and | 0.31 s |
| ④ | Probability calculations | With a selected , Matlab → calculates M and T | 0.24 s |
| ⑤ | ED performing | Matlab → is compared with T | 0.27 s |
| ⑥ | Results presentation | Channel’s energy lower than T are marked as TVWS | 0.29 s |
| Total | 1.45 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Corral-De-Witt, D.; Ahmed, S.; Awin, F.; Rojo-Álvarez, J.L.; Tepe, K. An Accurate Probabilistic Model for TVWS Identification. Appl. Sci. 2019, 9, 4232. https://doi.org/10.3390/app9204232
Corral-De-Witt D, Ahmed S, Awin F, Rojo-Álvarez JL, Tepe K. An Accurate Probabilistic Model for TVWS Identification. Applied Sciences. 2019; 9(20):4232. https://doi.org/10.3390/app9204232
Chicago/Turabian StyleCorral-De-Witt, Danilo, Sabbir Ahmed, Faroq Awin, José Luis Rojo-Álvarez, and Kemal Tepe. 2019. "An Accurate Probabilistic Model for TVWS Identification" Applied Sciences 9, no. 20: 4232. https://doi.org/10.3390/app9204232
APA StyleCorral-De-Witt, D., Ahmed, S., Awin, F., Rojo-Álvarez, J. L., & Tepe, K. (2019). An Accurate Probabilistic Model for TVWS Identification. Applied Sciences, 9(20), 4232. https://doi.org/10.3390/app9204232