A Theoretical Model with the Effect of Cracks in the Local Spalling of Full Ceramic Ball Bearings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Nonlinear Multi-Body Dynamic Modelling of a Defective Bearing
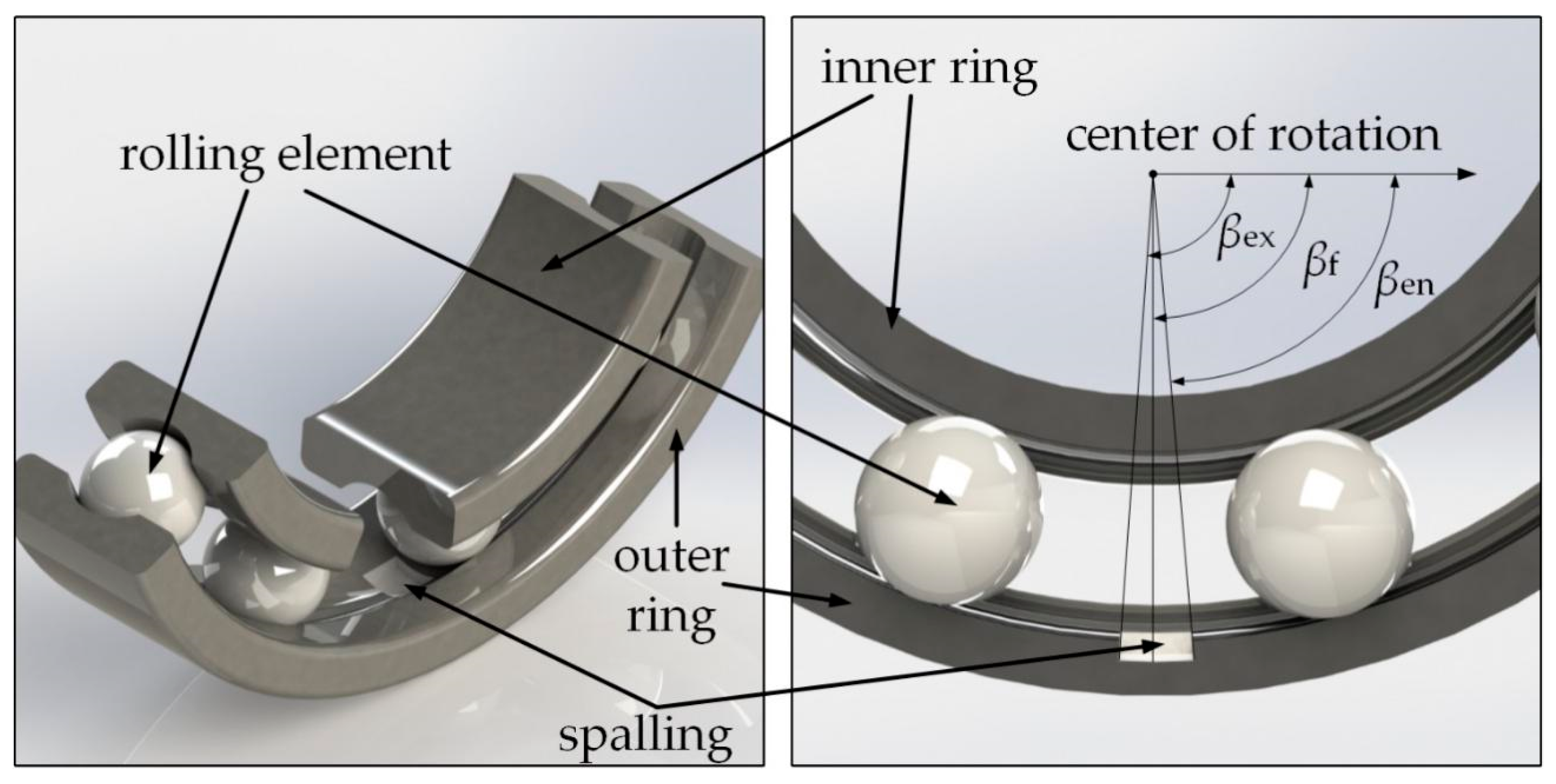
2.1. Kinematics of the Rolling Elements
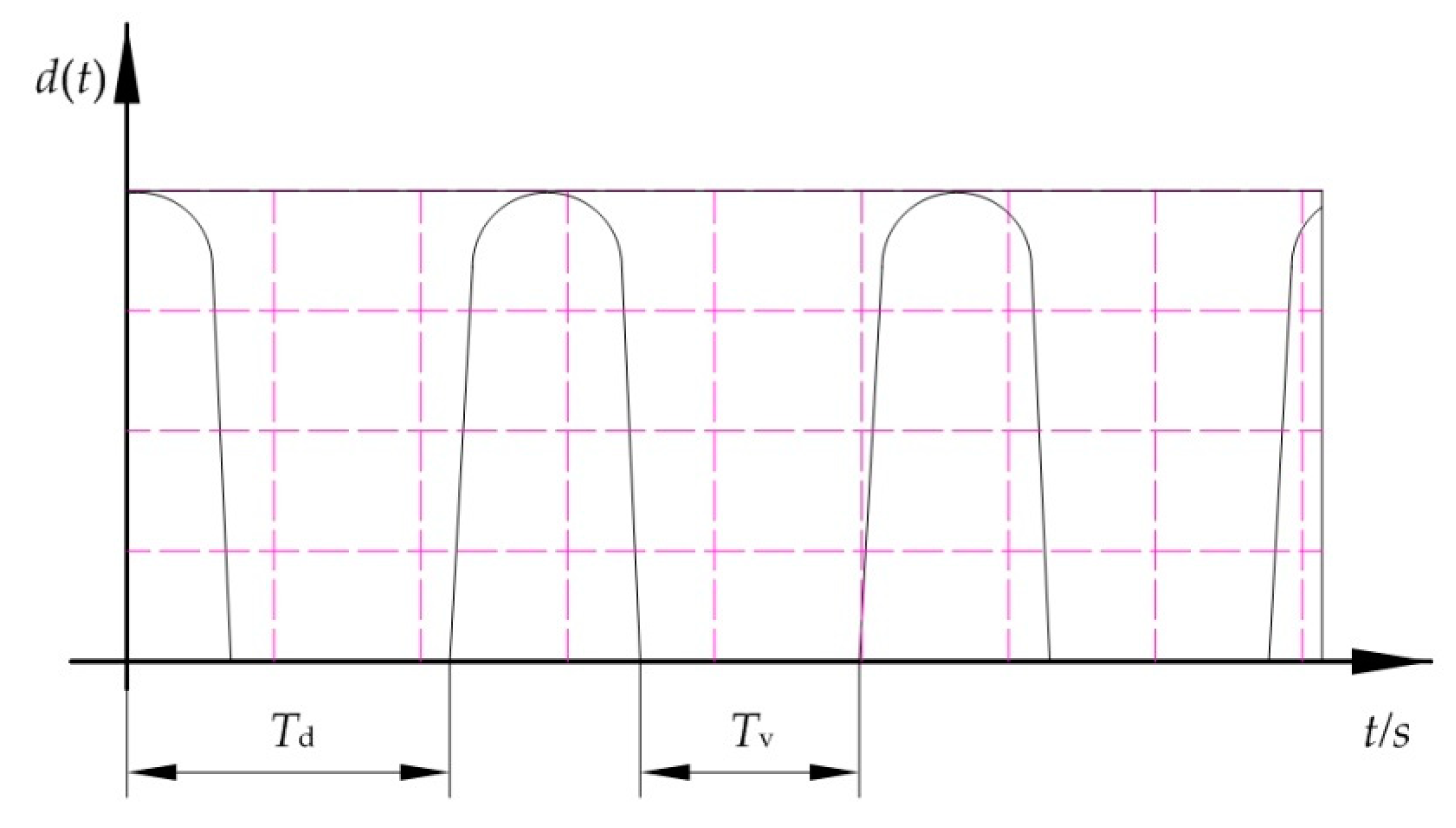
2.2. Modified Time-Varying Stiffness of Local Spalling Faults
2.3. Bearing Modulation of Local Fault Pulse Sequence
2.4. Nonlinear Dynamic Model
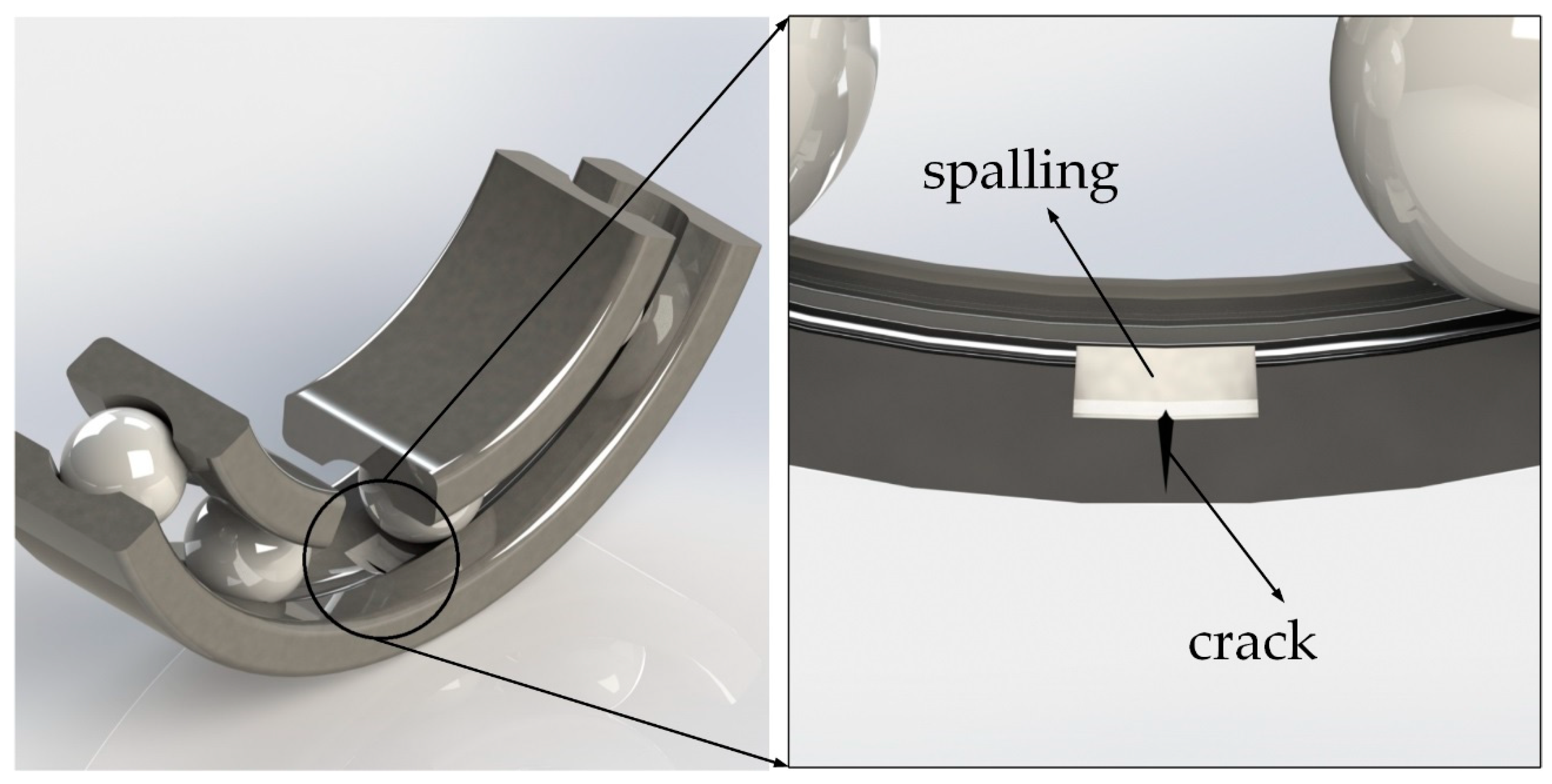
3. Time-Varying Stiffness of Outer Ring Crack Location
4. Model Validation
4.1. Analog Simulation
4.2. Effects of Different Relative Depths and Width
4.3. Influence of Crack Depth and Width
5. Discussion
6. Conclusions
- (1)
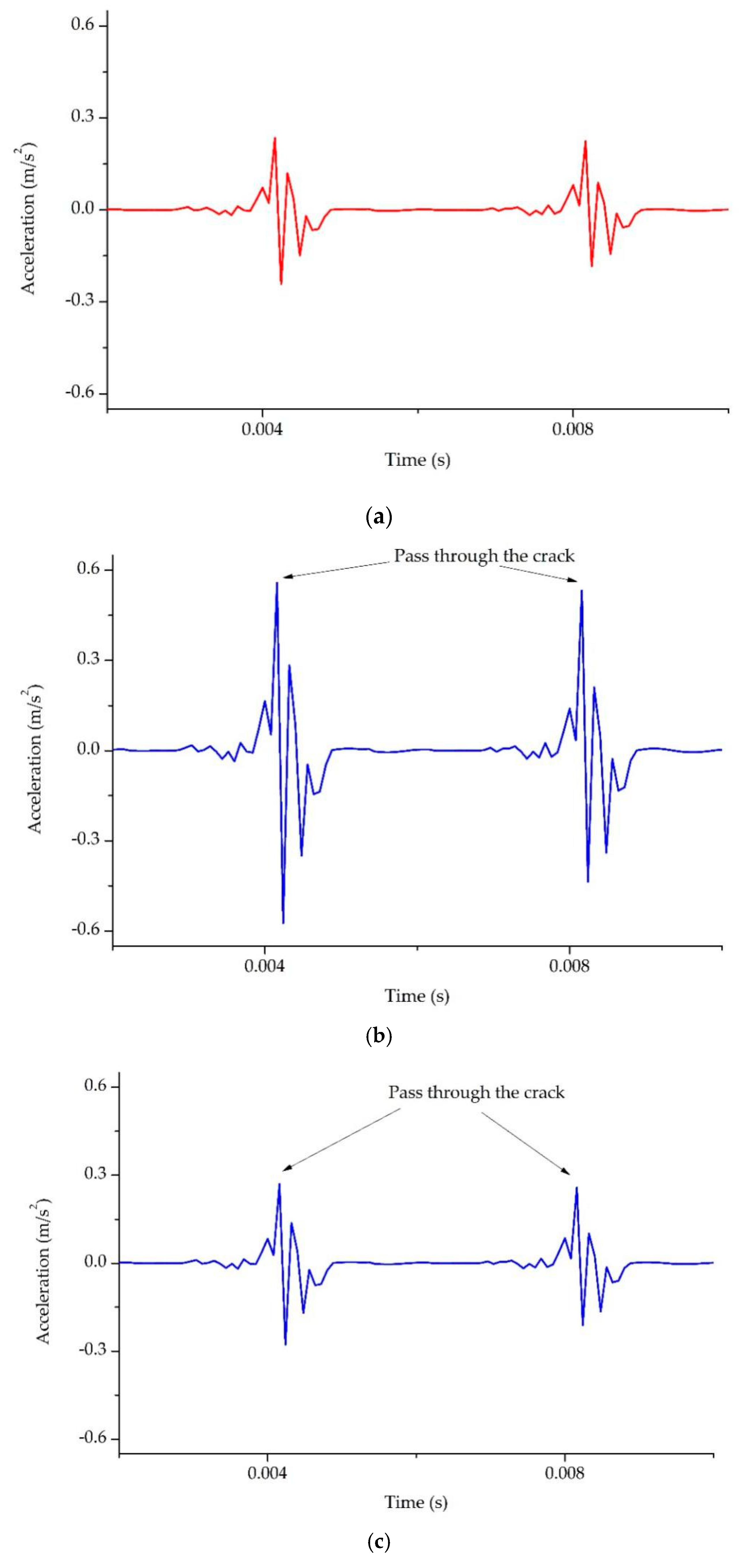
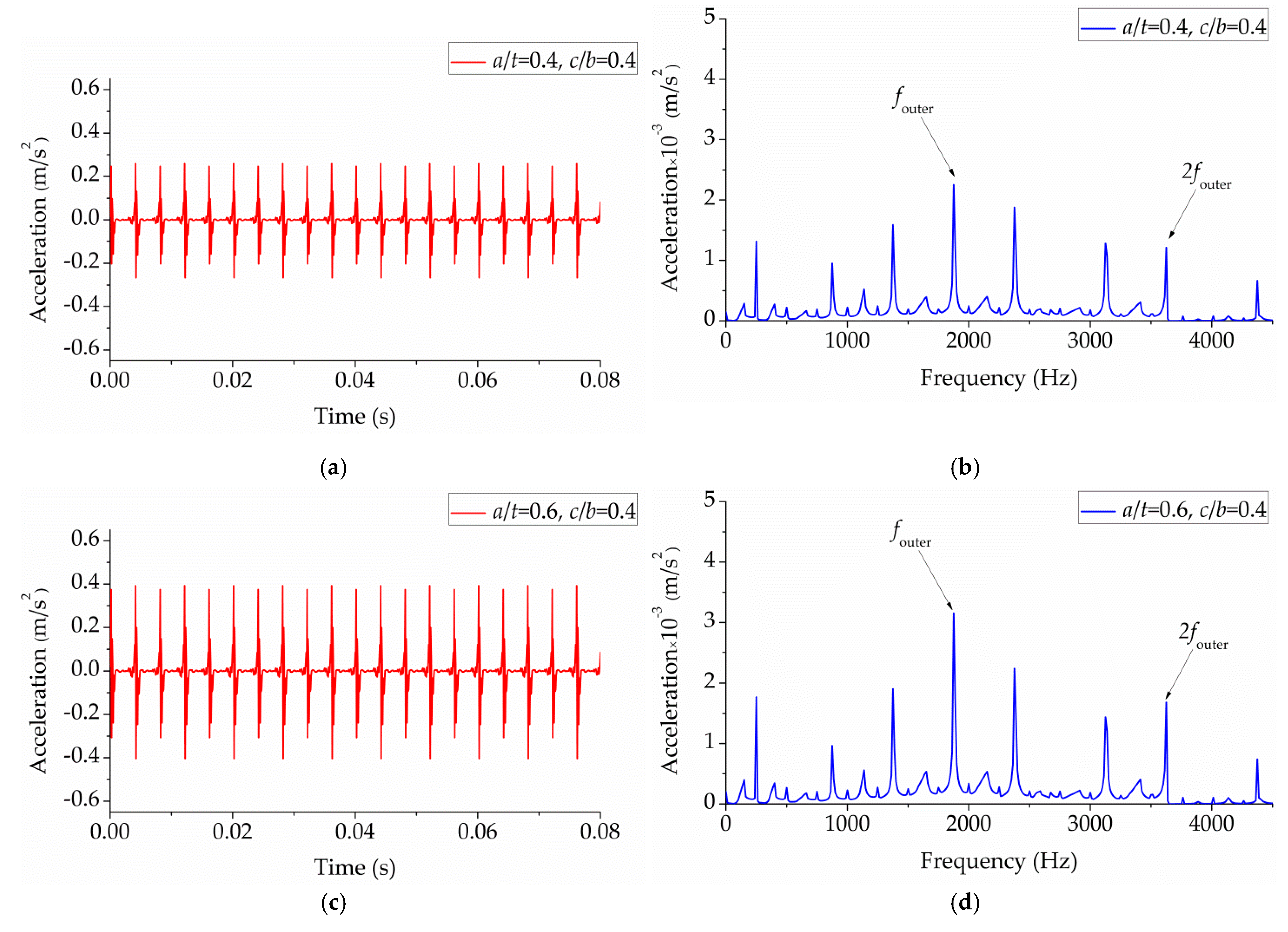
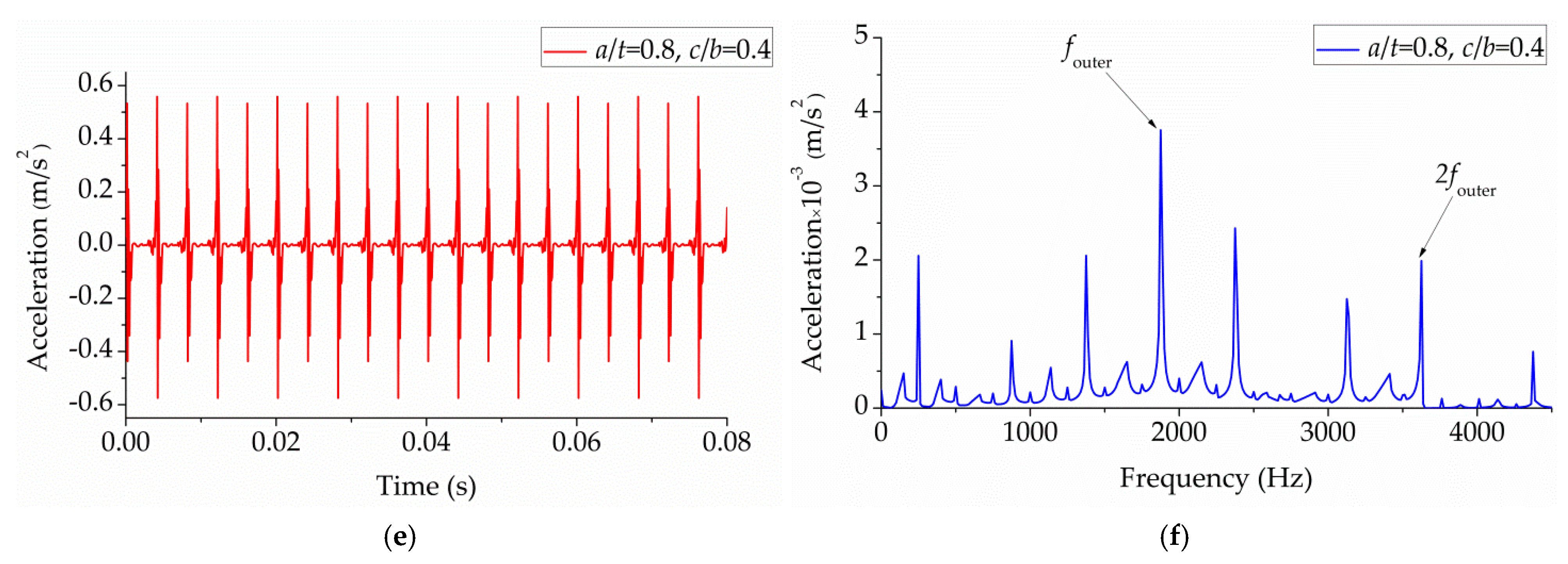
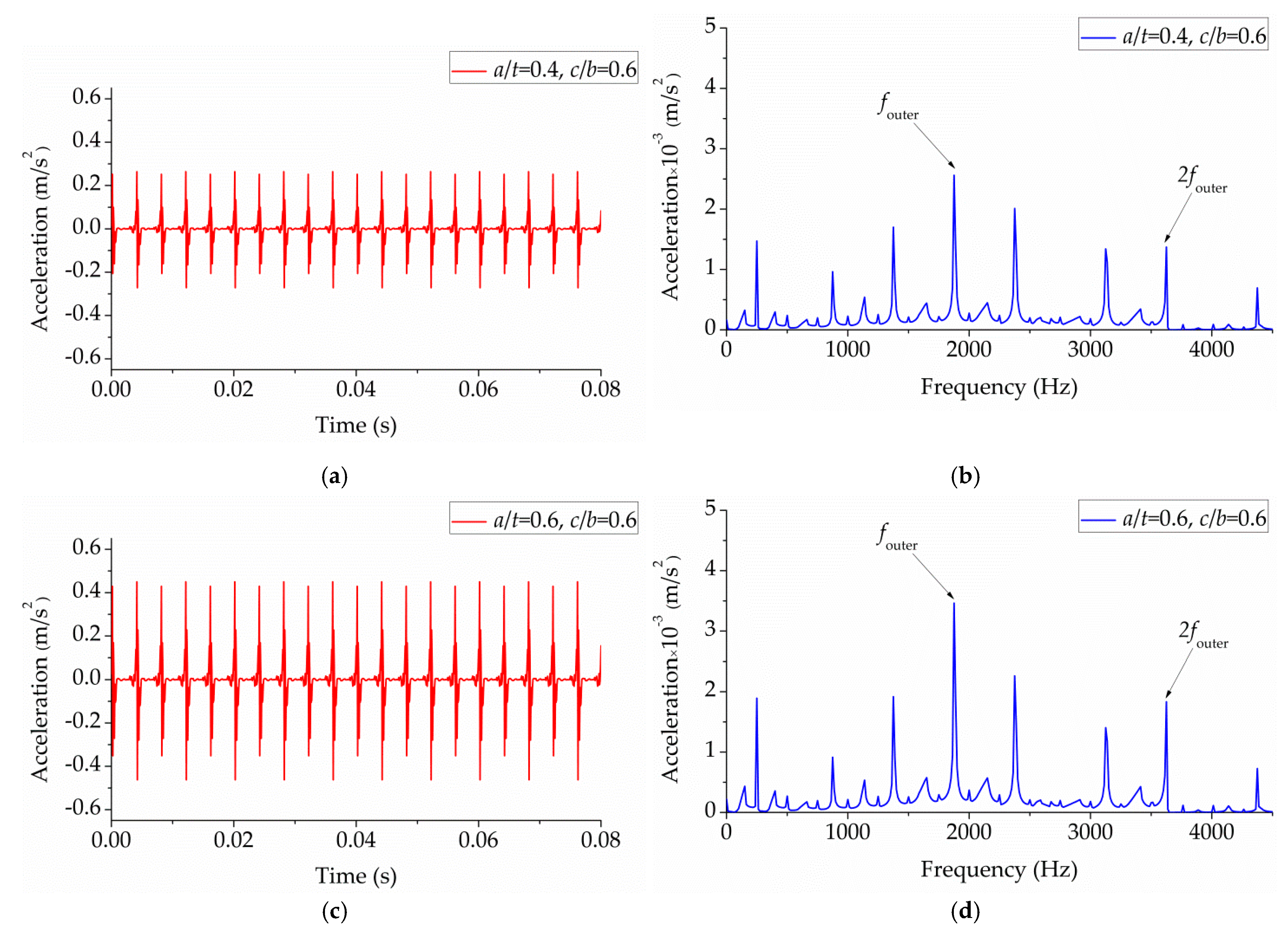
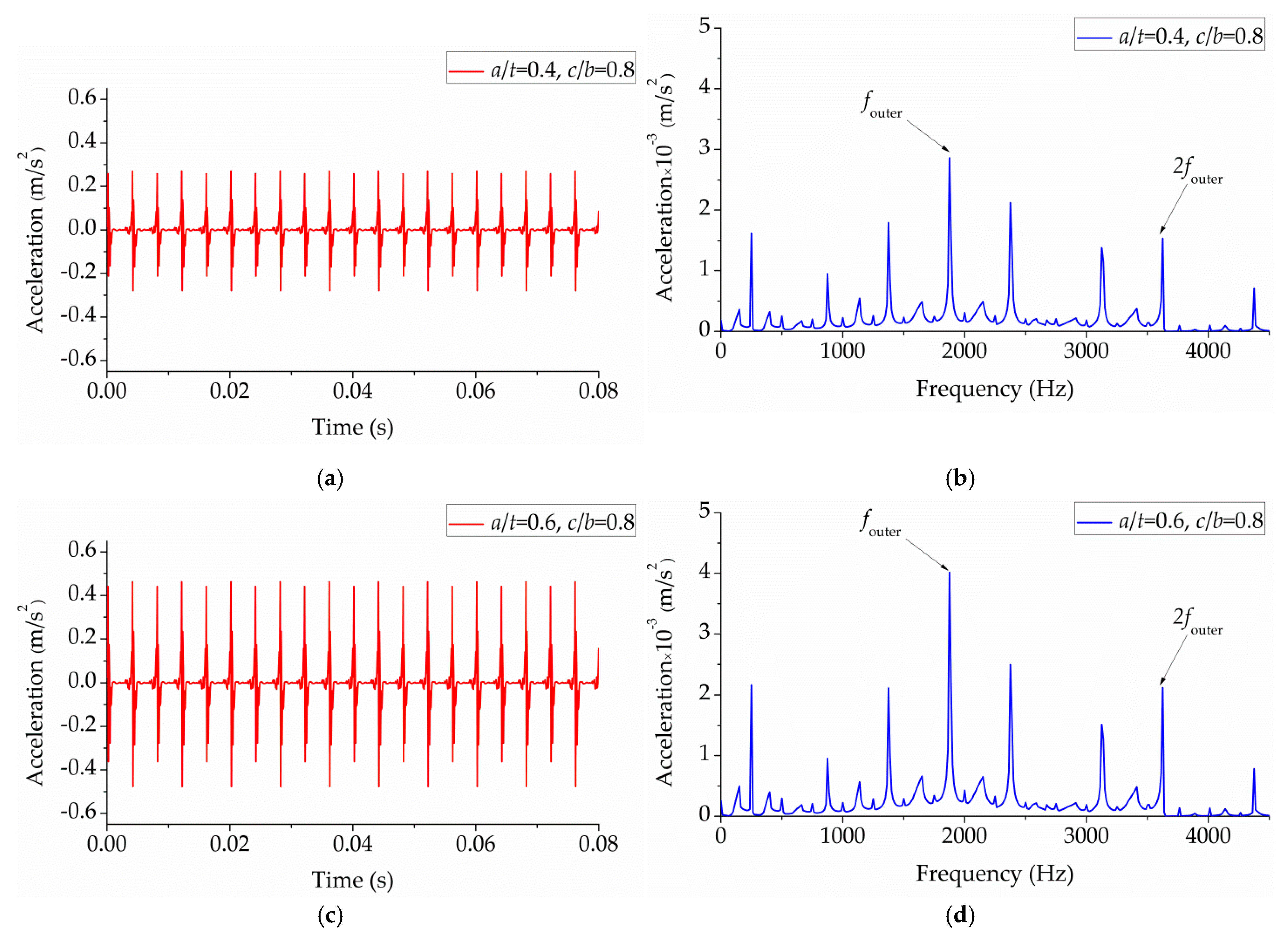
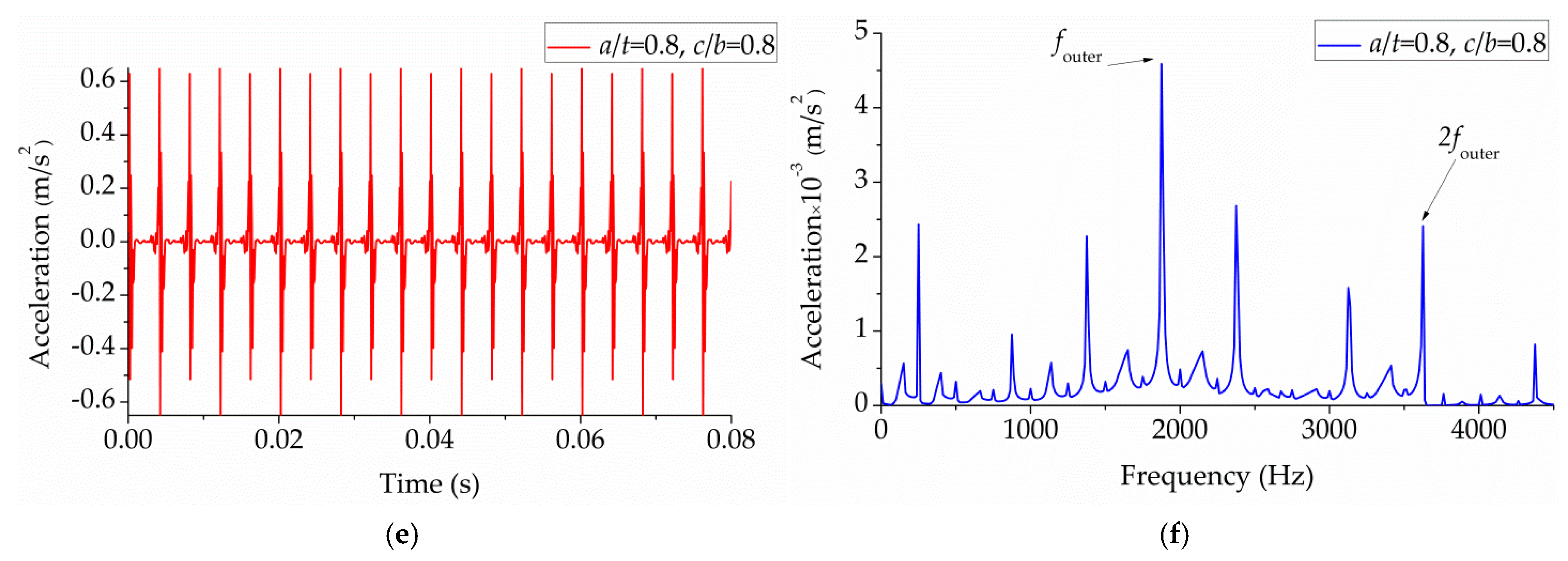
- With the appearance of the spalling fault on the outer ring, the vibration response signal of the faulty bearing will have more obvious periodic impact in the time domain, and the corresponding acceleration amplitude of the faulty feature of the outer ring will increase significantly in the frequency domain;
- (2)
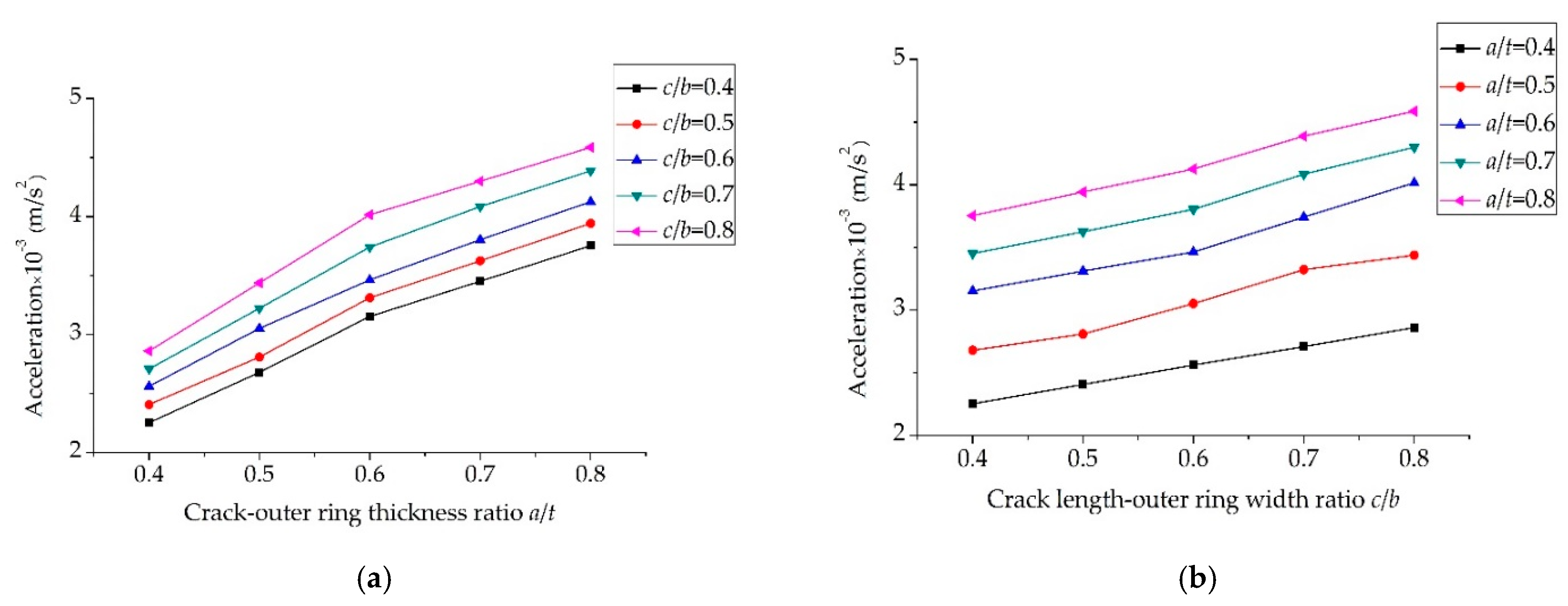
- Compared with the case where the outer ring has only spalling faults, the rigidity of the bearing outer ring will be weakened when there are cracks at the spalling position. Other influencing factors being equal, the rigidity of the bearing outer ring is weakened more obviously by the increase of the crack depth than by the increase of the crack width;
- (3)
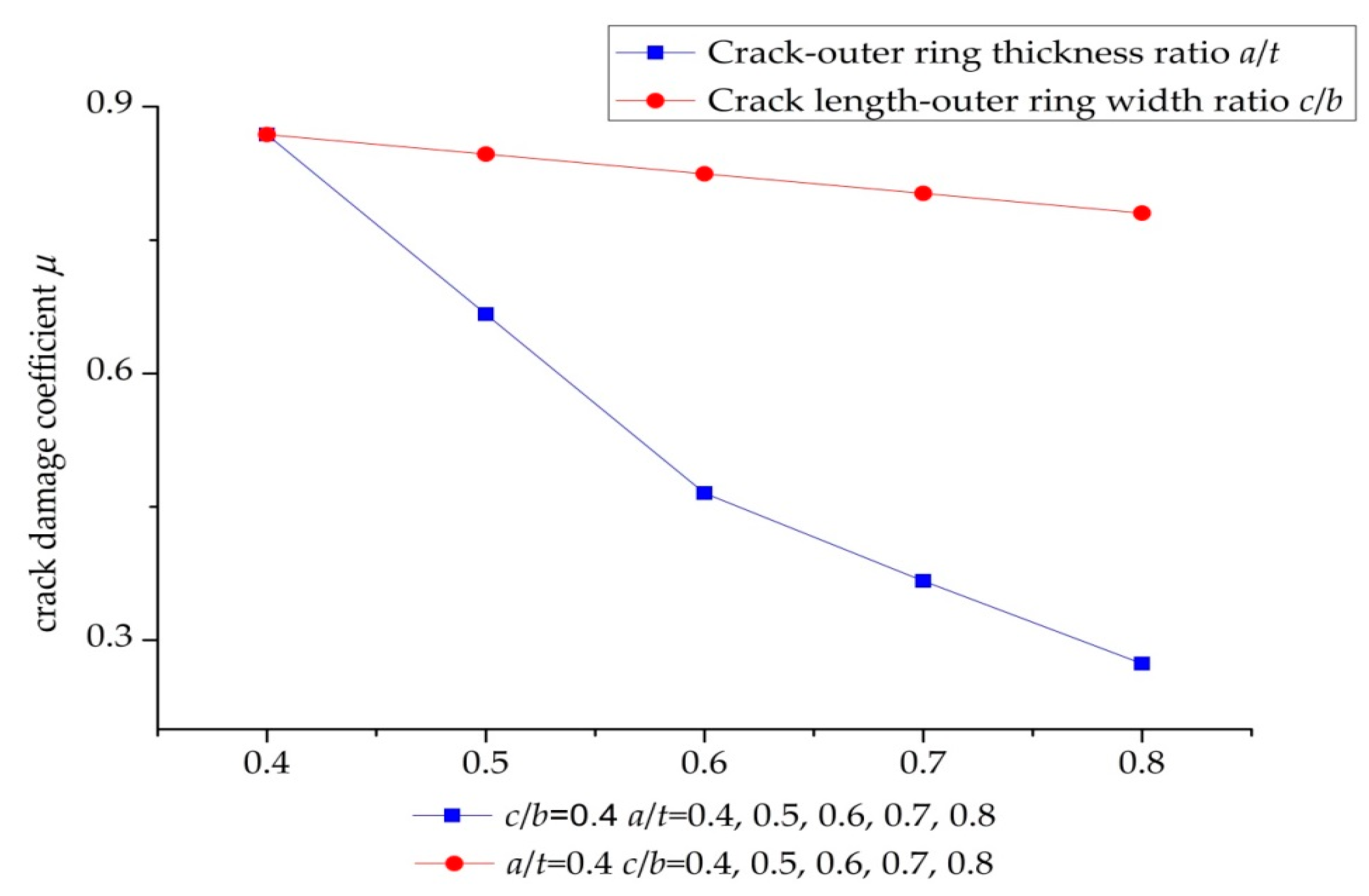
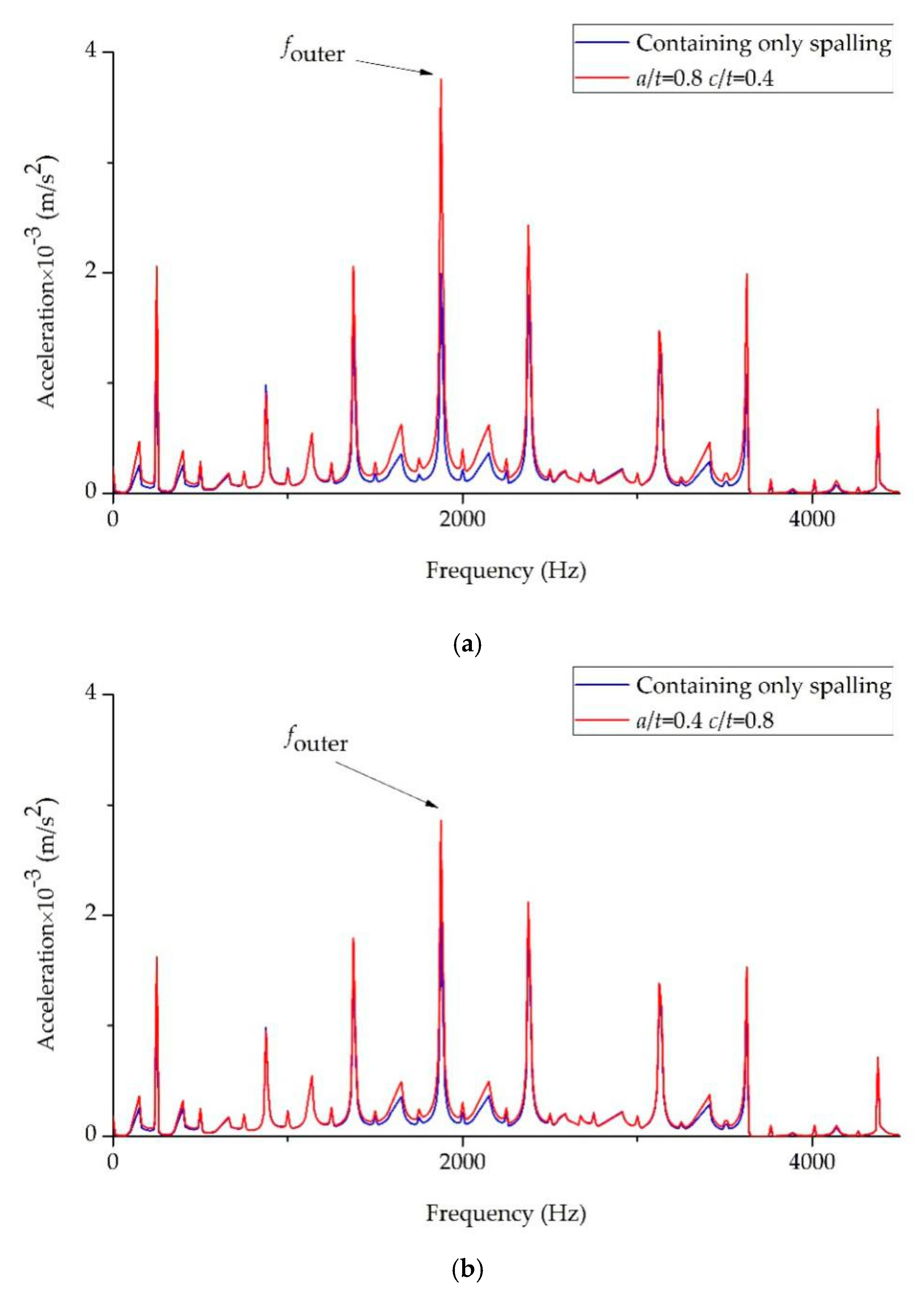
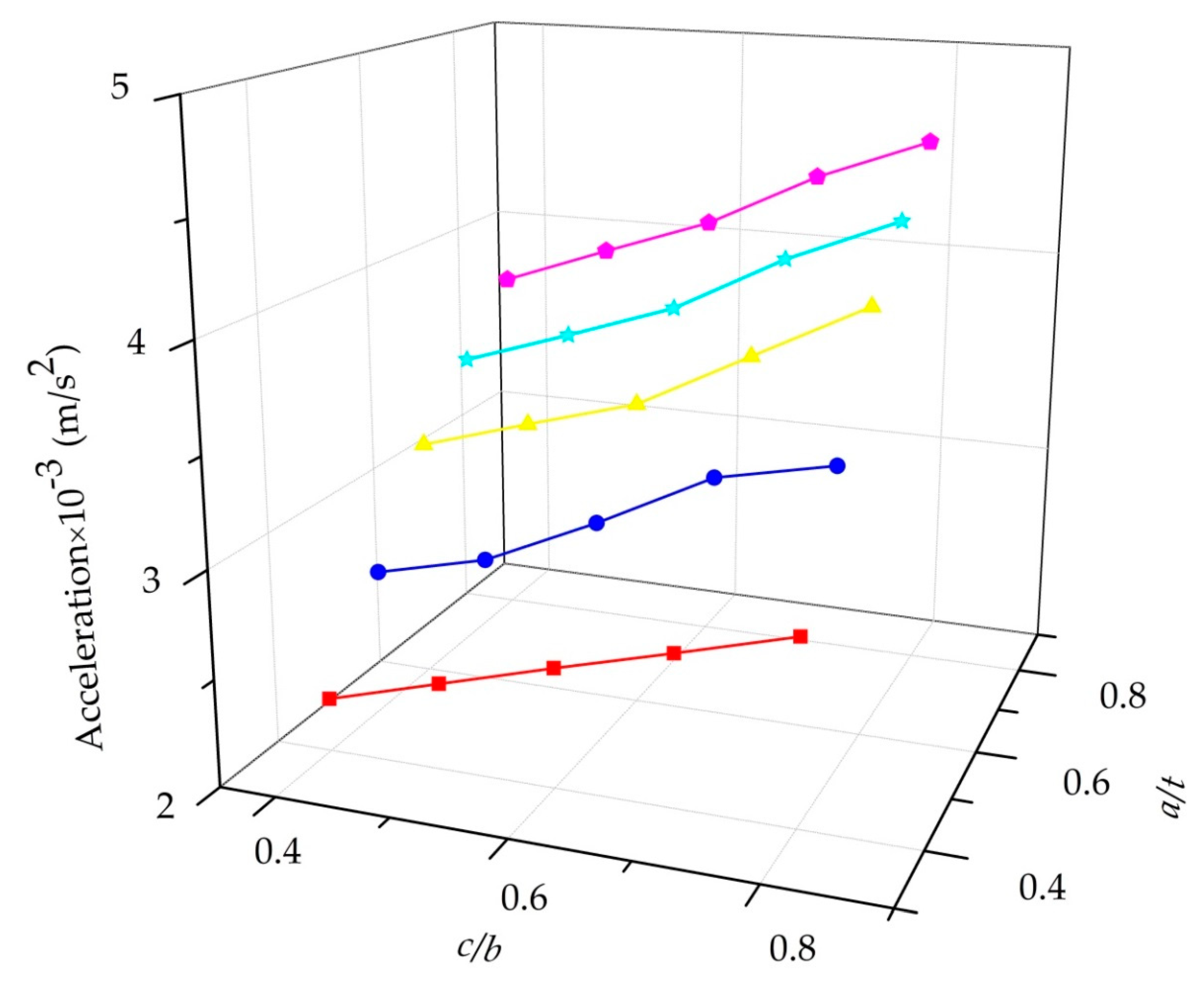
- The effect of crack depth on bearing vibration response is more significant when the crack–outer ring thickness ratio and the crack length–outer ring width ratio are less than 0.6, and the effect of crack depth on bearing vibration response is slower when the crack–outer ring thickness ratio and the crack length–outer ring width ratio are more than 0.6, while the effect of crack width on bearing vibration response is stable all the time;
- (4)
- In the process of health inspection of full ceramic bearing outer ring, the scale of crack can be estimated by the amplitude of different fault characteristic frequency.
Author Contributions
Funding
Conflicts of Interest
References
- Gloeckner, P.; Martin, M.; Flouros, M. Comparison of power losses and temperatures between an all-Steel and a direct outer ring–cooled, hybrid 133-mm-bore ball bearing at very high speeds. Tribol. Trans. 2017, 60, 1148–1158. [Google Scholar] [CrossRef]
- Wu, D.Y.; Wang, H.; Liu, H.X.; He, T.; Xie, T. Health monitoring on the spacecraft bearings in high-speed rotating systems by using the clustering fusion of normal acoustic parameters. Appl. Sci. 2019, 9, 3246. [Google Scholar] [CrossRef]
- Cui, L.L.; Wang, X.; Wang, H.Q.; Wu, N. Improved fault size estimation method for rolling element bearings based on concatenation dictionary. IEEE Access 2019, 7, 22710–22718. [Google Scholar] [CrossRef]
- Cui, L.L.; Wang, X.; Wang, H.Q.; Ma, J.F. Research on remaining useful life prediction of rolling element bearings based on time-varying kalman filter. IEEE Trans. Instrum. Meas. 2019. [Google Scholar] [CrossRef]
- Belinha, J.; Azevedo, J.M.C.; Dinis, L.M.J.S.; Natal, R.M. Simulating fracture propagation in brittle materials using a meshless approach. Eng. Comput. 2017, 34, 503–522. [Google Scholar] [CrossRef]
- Ma, D.J.; Wang, J.L.; Sun, L. Methodology for measuring fracture toughness of ceramicmaterials by instrumented indentation test with vickers indenter. J. Am. Ceram. Soc. 2017, 100, 2296–2308. [Google Scholar] [CrossRef]
- Vieillard, C. Observation of subsurface rolling contact fatigue cracks in silicon nitride and comparison of their location to Hertzian contact subsurface stresses. Int. J. Fatigue 2017, 96, 283–292. [Google Scholar] [CrossRef]
- Sun, L.; Ma, D.J.; Wang, L.Z.; Shi, X.Z.; Wang, J.L.; Chen, W. Determining indentation fracture toughness of ceramics by finite element method using virtual crack closure technique. Eng. Fract. Mech. 2018, 197, 151–159. [Google Scholar] [CrossRef]
- Li, B.Q.; Ma, H.; Yu, X.; Zeng, J.; Guo, X.M.; Wen, B.C. Nonlinear vibration and dynamic stability analysis of rotor blade system with nonlinear supports. Arch. Appl. Mech. 2019, 89, 1375–1402. [Google Scholar] [CrossRef]
- Cui, L.L.; Jin, Z.; Huang, Z.F.; Wang, H.Q. Fault severity classification and size estimation for ball bearings based on vibration mechanism. IEEE Access 2019, 7, 56107–56116. [Google Scholar] [CrossRef]
- Kida, K.; Koga, J.; Santos, E.C. Crack growth and splitting failure of silicon nitride ceramic balls under cyclic pressure loads. Mech. Mater. 2017, 106, 58–66. [Google Scholar] [CrossRef]
- Wang, W.; Wen, H.X.; He, N.R.; Chen, W. Effect of load on tribological properties of silicon nitride/steel under rolling-sliding contact condition. Tribol. Int. 2018, 125, 27–38. [Google Scholar] [CrossRef]
- Petersen, D.; Howard, C.; Prime, Z. Varying stiffness and load distributions in defective ball bearings: Analytical formulation and application to defect size estimation. J. Sound Vib. 2015, 337, 284–300. [Google Scholar] [CrossRef]
- Mishra, C.; Samantaray, A.K.; Chakraborty, G. Ball bearing defect models: A study of simulated and experimental fault signatures. J. Sound Vib. 2017, 400, 86–112. [Google Scholar] [CrossRef]
- Petersen, D.; Howard, C.Q.; Sawalhi, N.; Ahmadi, A.M.; Singh, S. Analysis of bearing stiffness variations, contact forces and vibrations in radially loaded double row rolling element bearings with raceway defects. Mech. Syst. Signal Process. 2015, 50–51, 139–160. [Google Scholar] [CrossRef]
- Moazenahmadi, A.; Petersen, C.D.; Howard, C.Q. A nonlinear dynamic vibration model of defective bearings-the importance of modelling the finite size of rolling elements. Mech. Syst. Signal Process. 2015, 52–53, 309–326. [Google Scholar] [CrossRef]
- Chang, B.Q.; Yan, C.F.; Yuan, H.; Kang, J.X.; Wang, K.; Wu, L.X. Dynamic modeling for rolling bearings under multi-event excitation. J. Vib. Shock 2018, 37, 16–24. [Google Scholar]
- Yan, Z.; Jiang, D.; Gao, X.M.; Hu, M.; Wang, D.S.; Fu, Y.L.; Sun, J.Y.; Feng, D.P.; Weng, L.J. Friction and wear behavior of TiN films against ceramic and steel balls. Tribol. Int. 2018, 124, 61–69. [Google Scholar] [CrossRef]
- Matej, R.; Gregor, Č.; Miha, B. A smooth contact-state transition in a dynamic model of rolling-element bearings. J. Sound Vib. 2018, 430, 196–213. [Google Scholar]
- Raga, R.; Khader, I.; Chlup, Z.; Kailer, A. Damage initiation and evolution in silicon nitride under non-conforming lubricated hybrid rolling contact. Wear 2016, 360–361, 147–159. [Google Scholar] [CrossRef]
- Kanematsu, W. A review of rolling contact fatigue behavior of silicon nitride focusing on testing practices and crack propagation analysis. Wear 2018, 400–401, 10–20. [Google Scholar] [CrossRef]
- Nazir, M.H.; Khan, Z.A.; Saeed, A. Experimental analysis and modelling of c-crack propagation in silicon nitride ball bearing element under rolling contact fatigue. Tribol. Int. 2018, 126, 386–401. [Google Scholar] [CrossRef]
- Härtelt, M.; Fünfschilling, S.; Schwind, T.; Riesch-Oppermann, H.; Fett, T.; Kruzic, J.J. Deducing the fatigue crack growth rates of natural flaws in silicon nitride ceramics: Role of R-Curves. J. Am. Ceram. Soc. 2013, 96, 2593–2597. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Feng, R.J.; Pang, X.; Wang, Q.B.; Wen, B.C. Review on dynamics of cracked gear systems. Eng. Fail. Anal. 2015, 55, 224–245. [Google Scholar] [CrossRef]
- Liu, Y.; Shen, Y. Influence of crack geometric properties on its propagation tendency of rail surface crack under rolling contact fatigue for the port machines. J. Coast. Res. 2015, 73, 188–192. [Google Scholar] [CrossRef]
- White, P.D.; Barter, S.A.; Medhekar, N. Comparison of fatigue crack growth stress ratio effects under simple variable amplitude loading using fractographic and strain measurements. Int. J. Fatigue 2018, 112, 240–252. [Google Scholar] [CrossRef]
- Wang, K.; Liu, M.L.; Su, Z.Q.; Yuan, S.F.; Fan, Z. Analytical insight into “breathing” crack-induced acoustic nonlinearity with an application to quantitative evaluation of contact cracks. Ultrasonics 2018, 88, 157–167. [Google Scholar] [CrossRef]
- Raga, R.; Khader, I.; Chlup, Z.; Kailer, A. Damage progression in silicon nitride undergoing non-conforming hybrid cyclic contact. Int. J. Fatigue 2017, 105, 97–110. [Google Scholar] [CrossRef]
- Saeedifar, M.; Ahmadi Najafabadi, M.; Mohammadi, K.; Fotouhi, M.; Toudeshky, H.H.; Mohammadi, R. Acoustic emission-based methodology to evaluate delamination crack growth under quasi-static and fatigue loading conditions. J. Nondestruct. Eval. 2018, 37, 1. [Google Scholar] [CrossRef]
- Strobl, S.; Supancic, P.; Lube, T.; Danzer, R. Corrigendum to”surface crack in tension or in bending-A reassessment of the Newman and Raju formula in respect to fracture toughness measurements in brittle materials” [J. Eur. Ceram. Soc. 32 (8) (2012) 1491-1501]. J. Eur. Ceram. Soc. 2018, 38, 355–358. [Google Scholar] [CrossRef]
- Wang, L.Z.; Ma, D.J.; Shi, X.Z.; Sun, L.; Gao, T.T. Determining the fracture toughness of silicon nitride by Vickers indenter. China Meas. Test. 2017, 43, 129–135. [Google Scholar]
- Niu, L.K.; Cao, H.R.; He, Z.J.; Li, Y.M. A systematic study of ball passing frequencies based on dynamic modeling of rolling ball bearings with localized surface defects. J. Sound Vib. 2015, 357, 207–232. [Google Scholar] [CrossRef]
- Zhao, M.; Lin, J.; Xu, X.Q.; Lei, Y.G. Tacholess envelope order analysis and its application to fault detection of rolling element bearings with varying speeds. Sensors 2013, 13, 10856–10875. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, Y.; Yan, K.; Wang, F.Z.; Hong, J. A novel method to model effects of natural defect on roller bearing. Tribol. Int. 2018, 122, 169–178. [Google Scholar] [CrossRef]
- Qiu, M.F.; Minson, B.R.; Raeymaekers, B. The effect of texture shape on the friction coefficient and stiffness of gas-lubricated parallel slider bearings. Tribol. Int. 2013, 67, 278–288. [Google Scholar] [CrossRef]
- Gong, J.H. Fracture Mechanics of Ceramics, 1st ed.; Tsinghua University: Beijing, China, 2001; pp. 34–37. [Google Scholar]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Liu, Z.; Bai, X.; Li, Y.; Wu, Y. A Theoretical Model with the Effect of Cracks in the Local Spalling of Full Ceramic Ball Bearings. Appl. Sci. 2019, 9, 4142. https://doi.org/10.3390/app9194142
Shi H, Liu Z, Bai X, Li Y, Wu Y. A Theoretical Model with the Effect of Cracks in the Local Spalling of Full Ceramic Ball Bearings. Applied Sciences. 2019; 9(19):4142. https://doi.org/10.3390/app9194142
Chicago/Turabian StyleShi, Huaitao, Zimeng Liu, Xiaotian Bai, Yupeng Li, and Yuhou Wu. 2019. "A Theoretical Model with the Effect of Cracks in the Local Spalling of Full Ceramic Ball Bearings" Applied Sciences 9, no. 19: 4142. https://doi.org/10.3390/app9194142
APA StyleShi, H., Liu, Z., Bai, X., Li, Y., & Wu, Y. (2019). A Theoretical Model with the Effect of Cracks in the Local Spalling of Full Ceramic Ball Bearings. Applied Sciences, 9(19), 4142. https://doi.org/10.3390/app9194142