A Robust Adaptive Trajectory Tracking Algorithm Using SMC and Machine Learning for FFSGRs with Actuator Dead Zones

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. System Dynamic Description
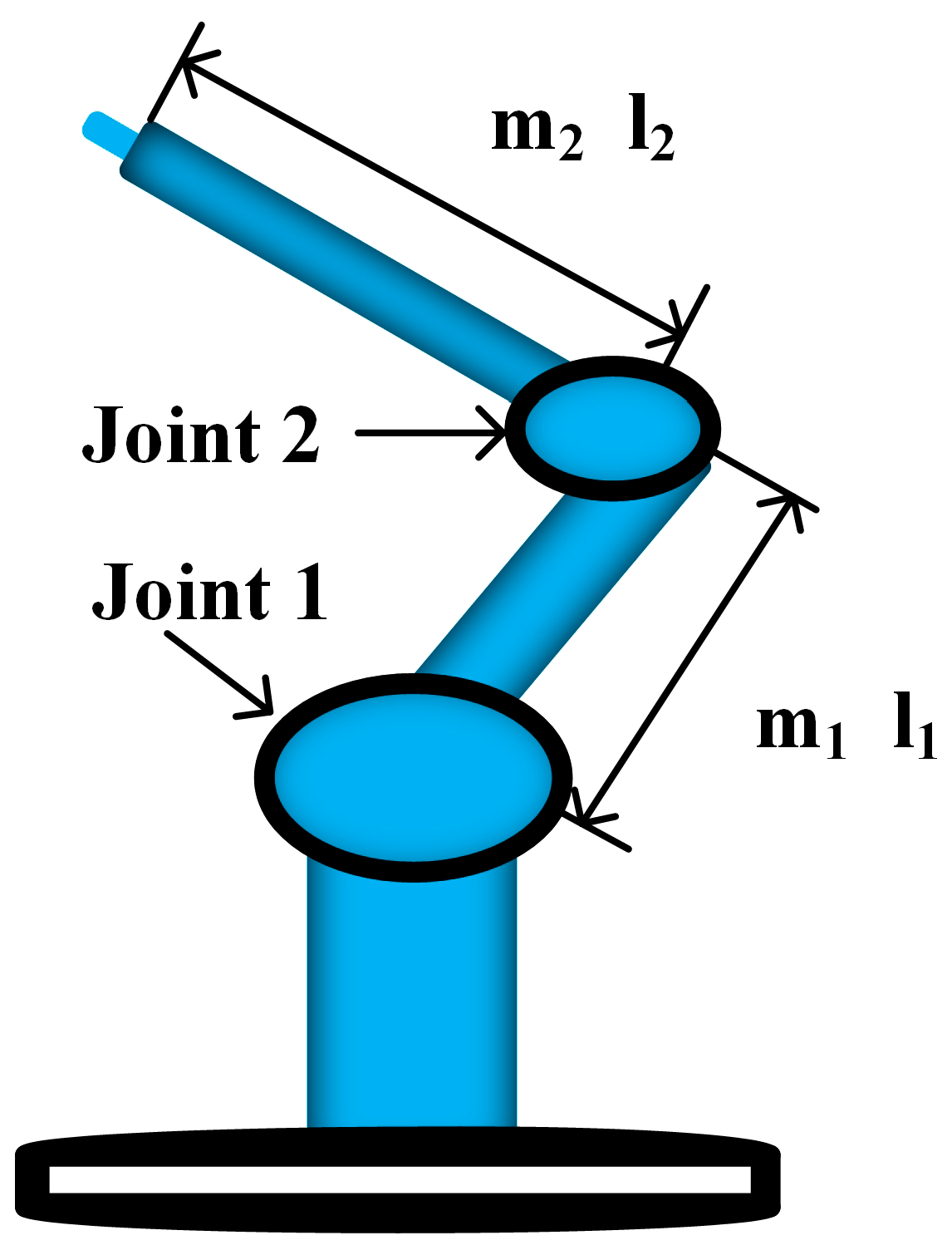
2.1. System Model of Free-Form Surface Grinding Robot
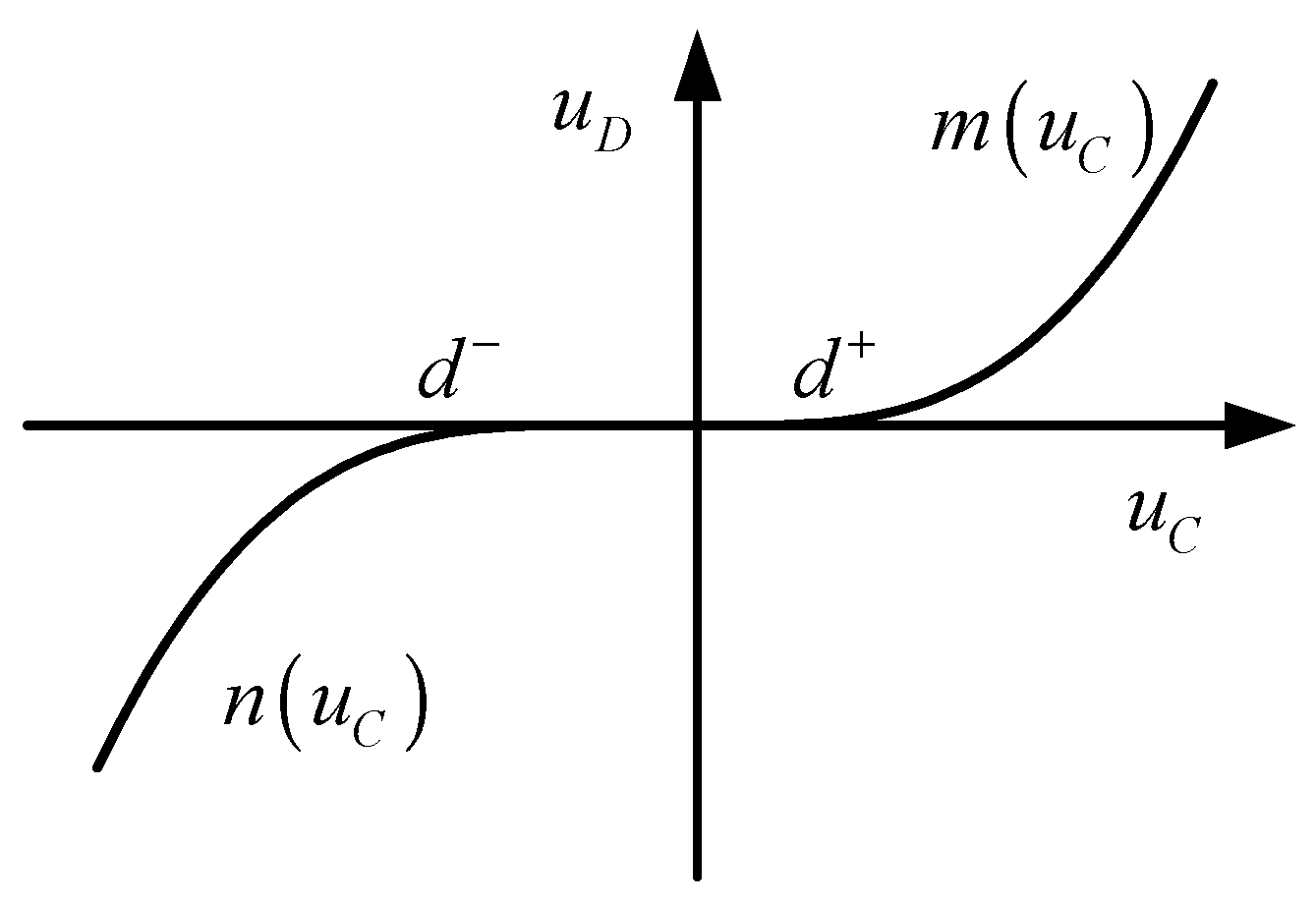
2.2. Dead Zone Non-Linearity Description
3. An Adaptive Robust Controller Using SMCs and RBFNNs
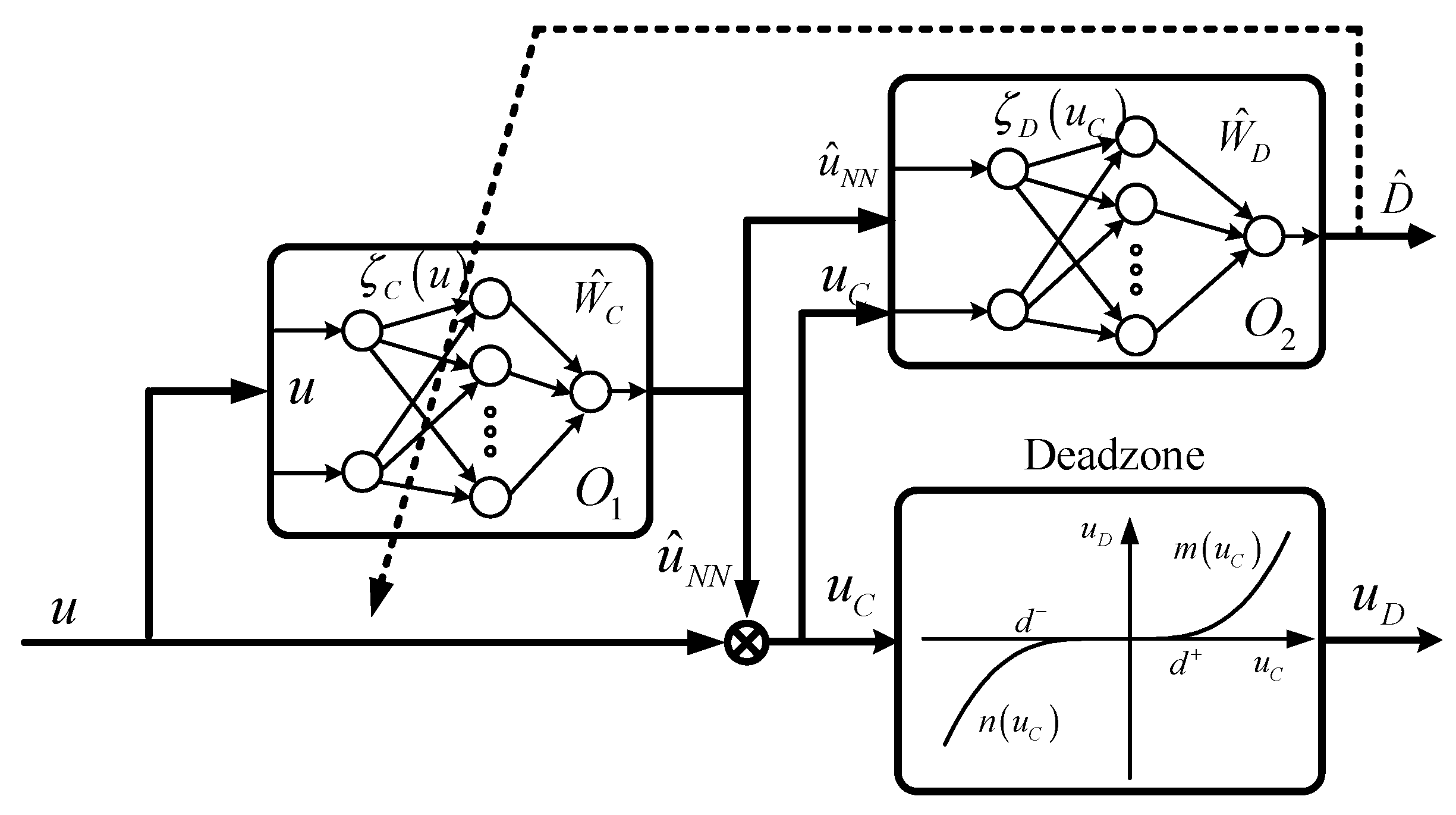
3.1. Dead Zone Compensation Algorithm
3.2. Controller Design and Stability Analysis
4. Simulation and Experimental Results
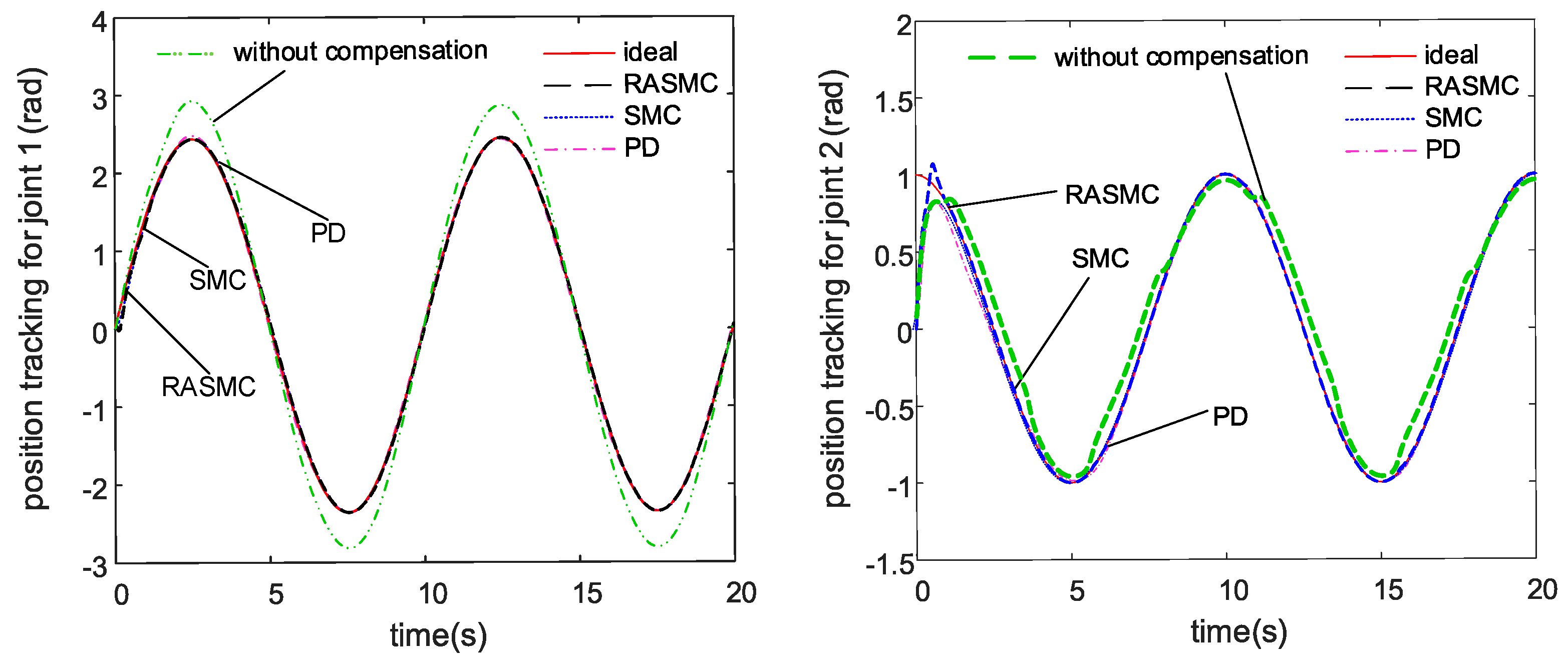
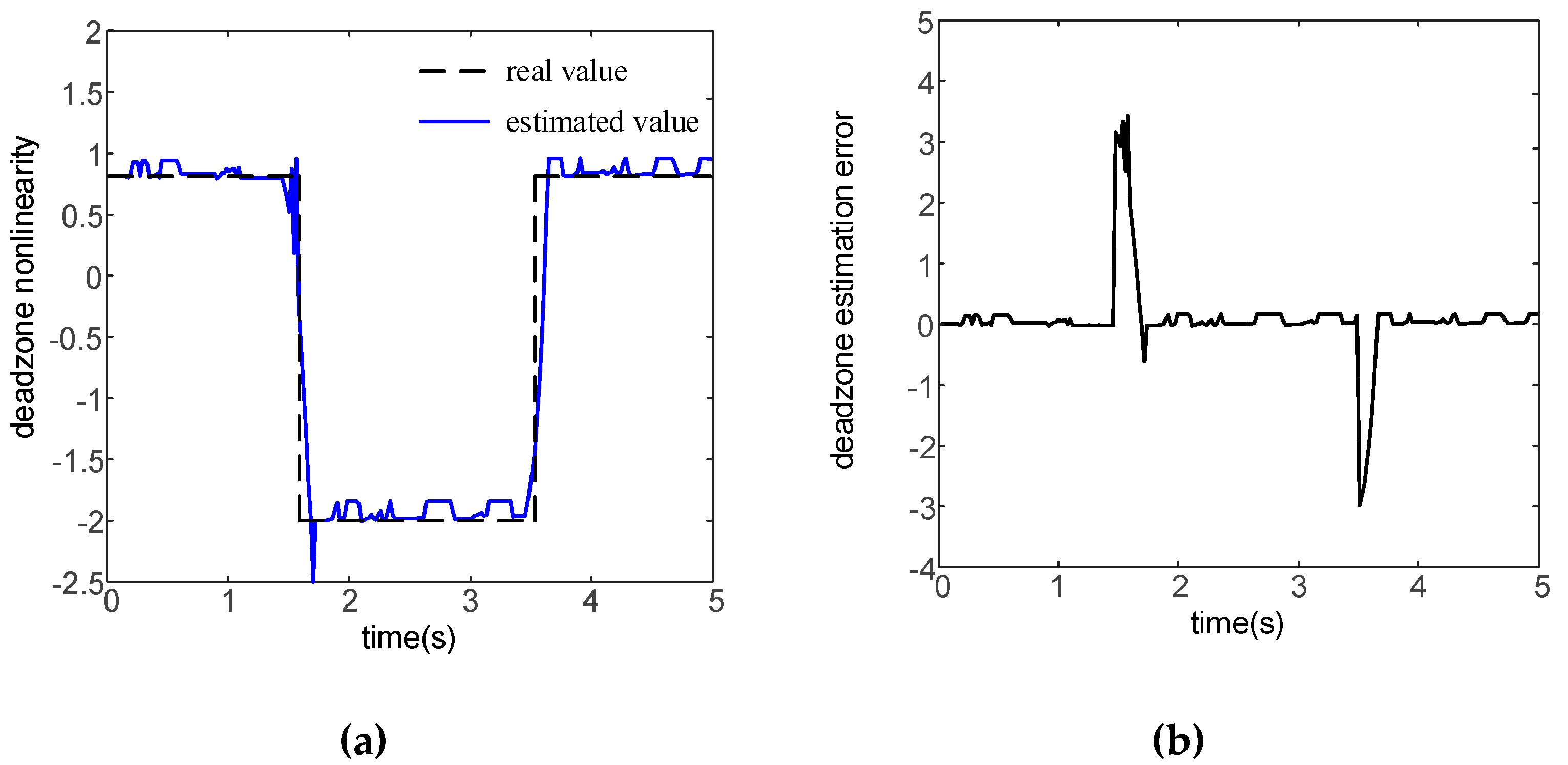
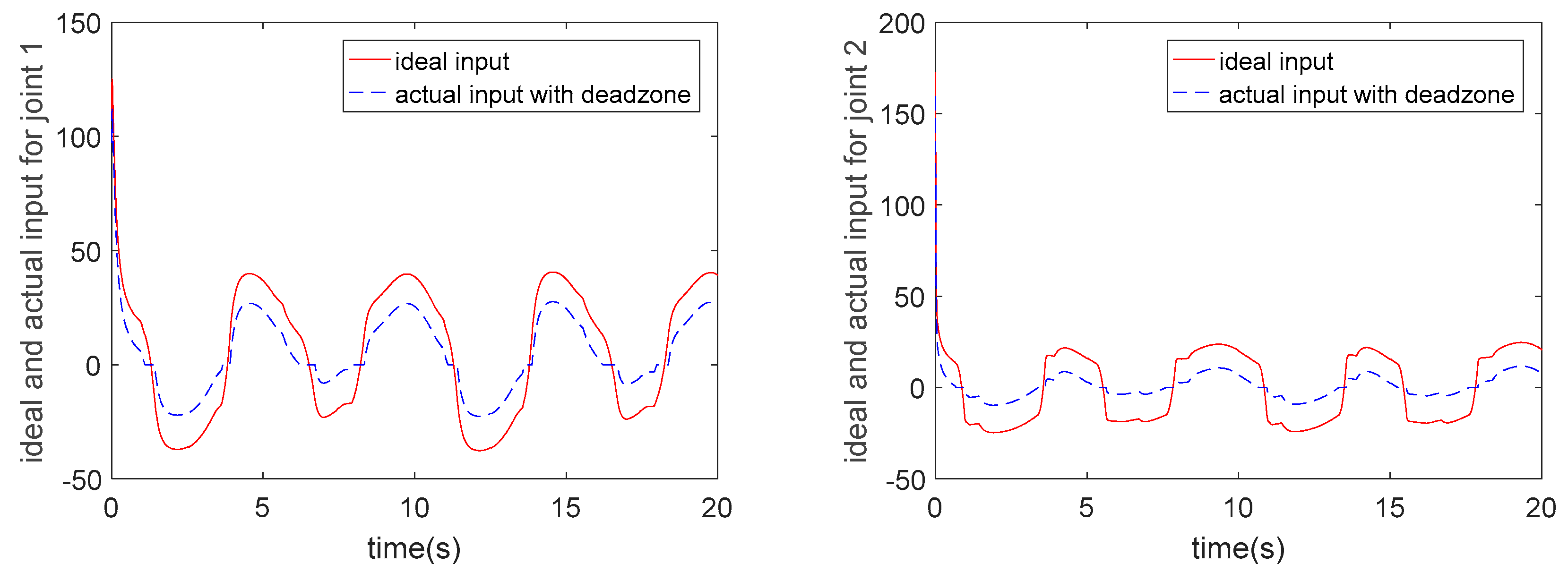
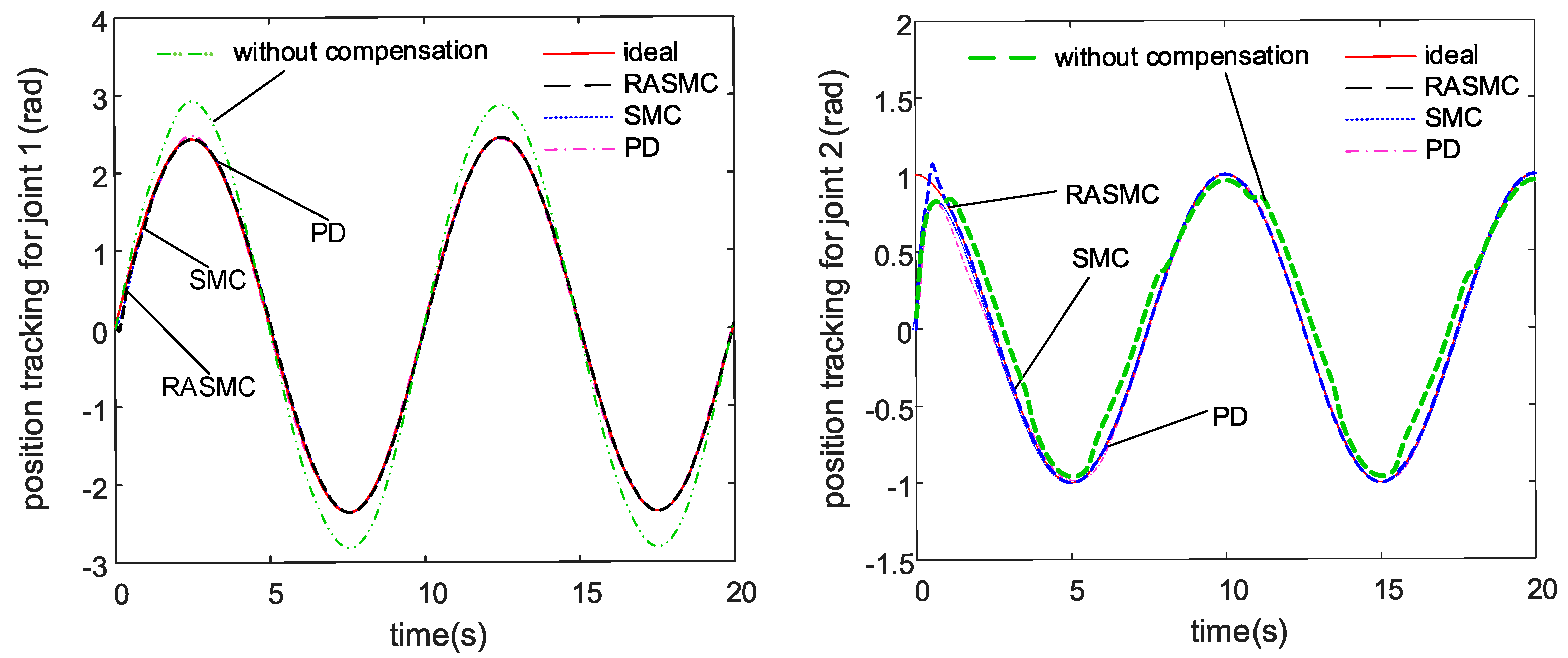
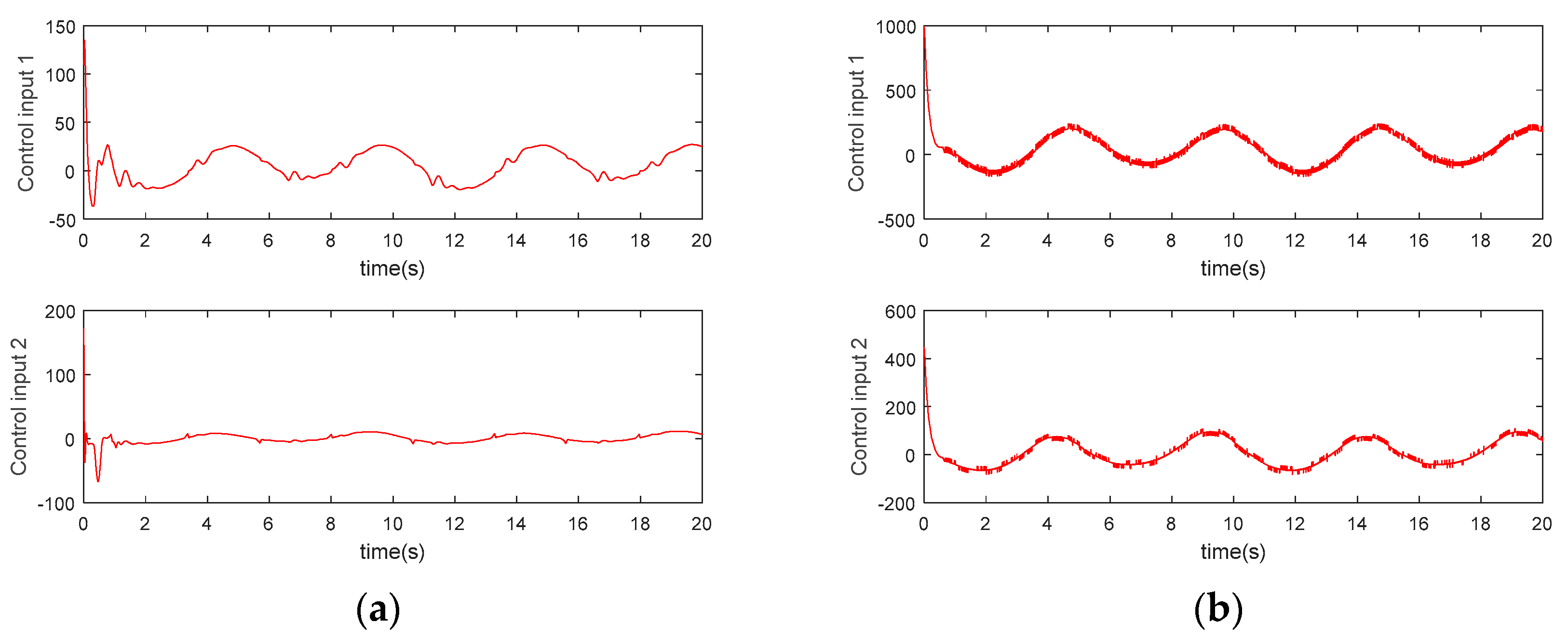
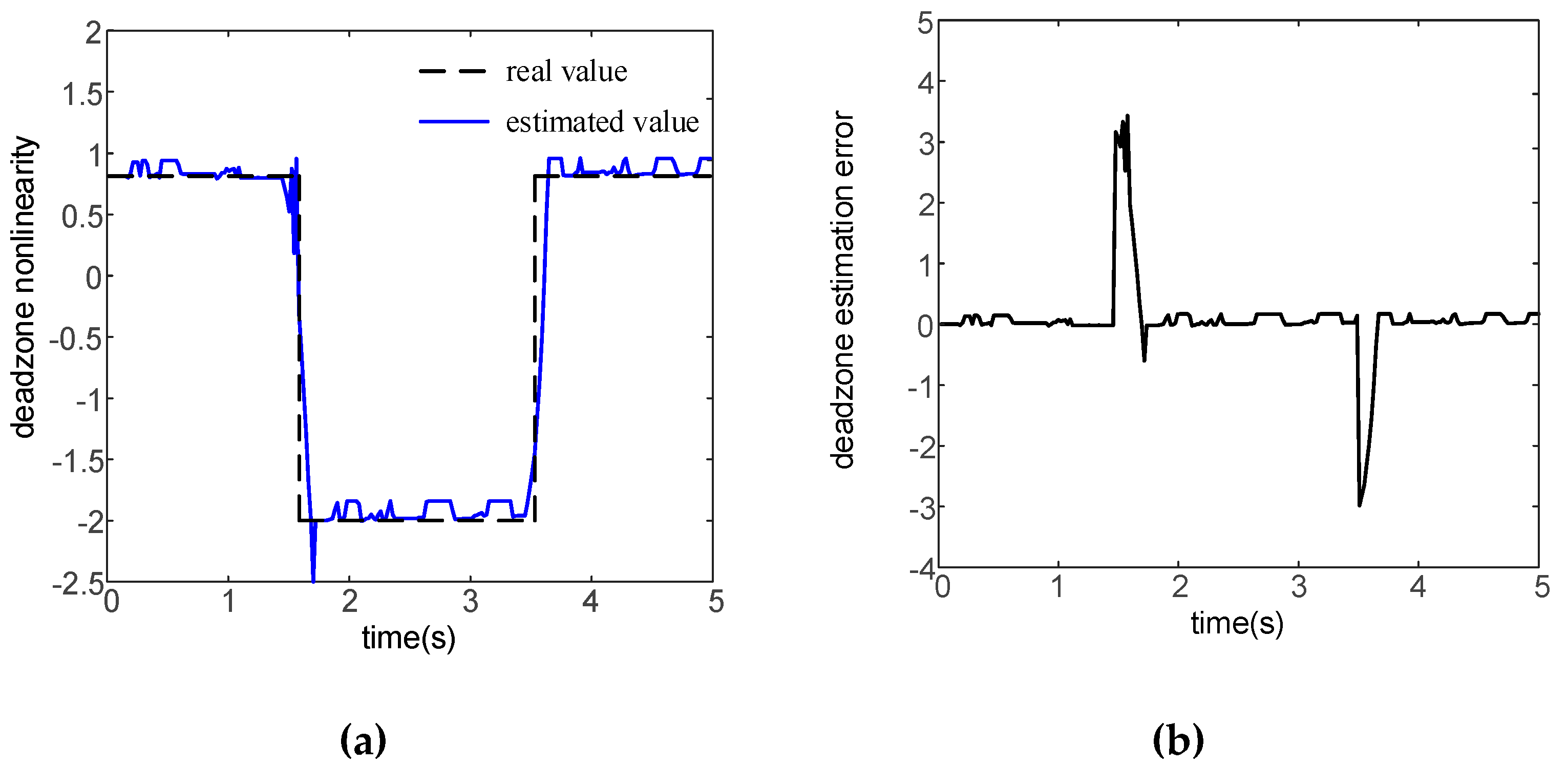
4.1. Simulation Analysis
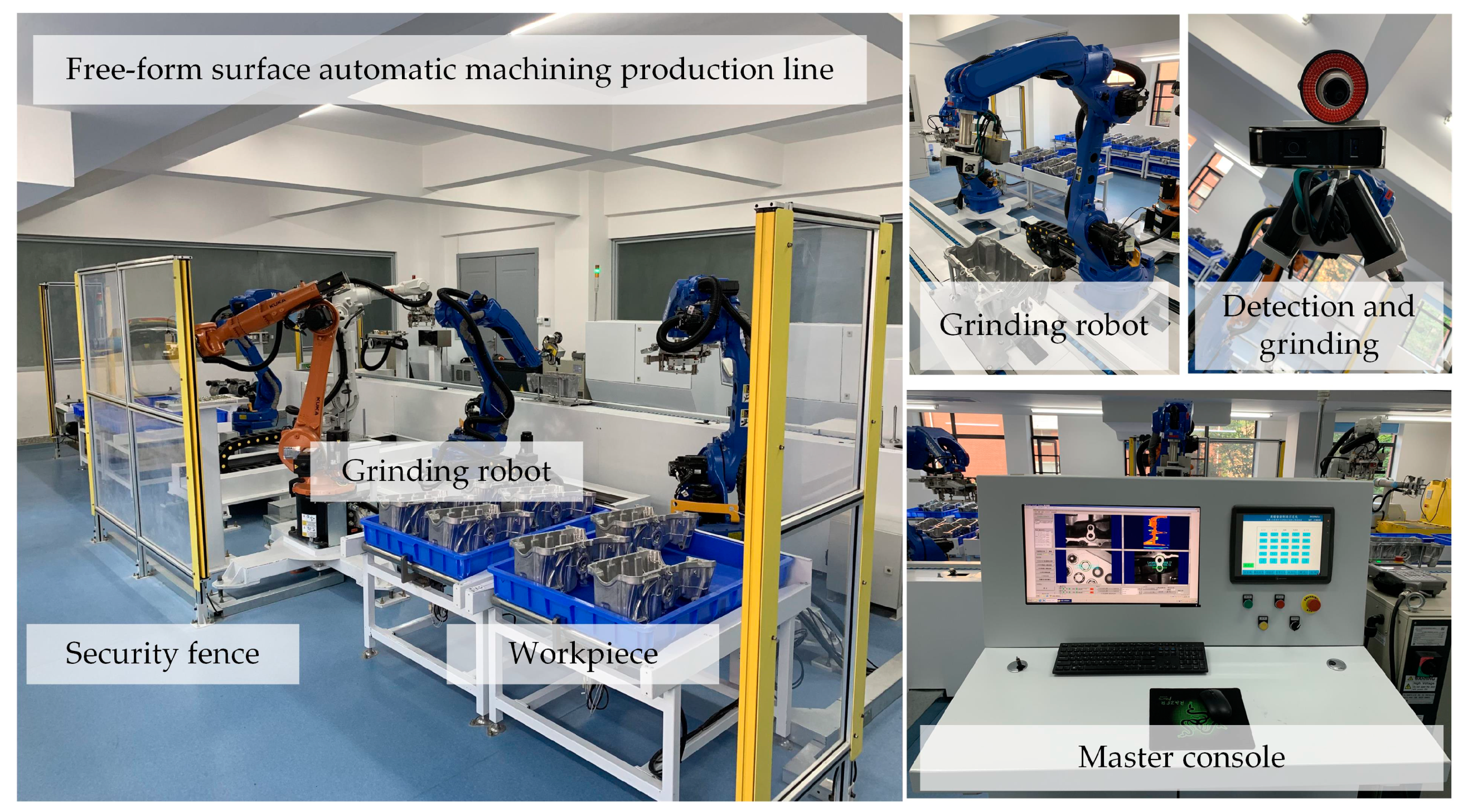
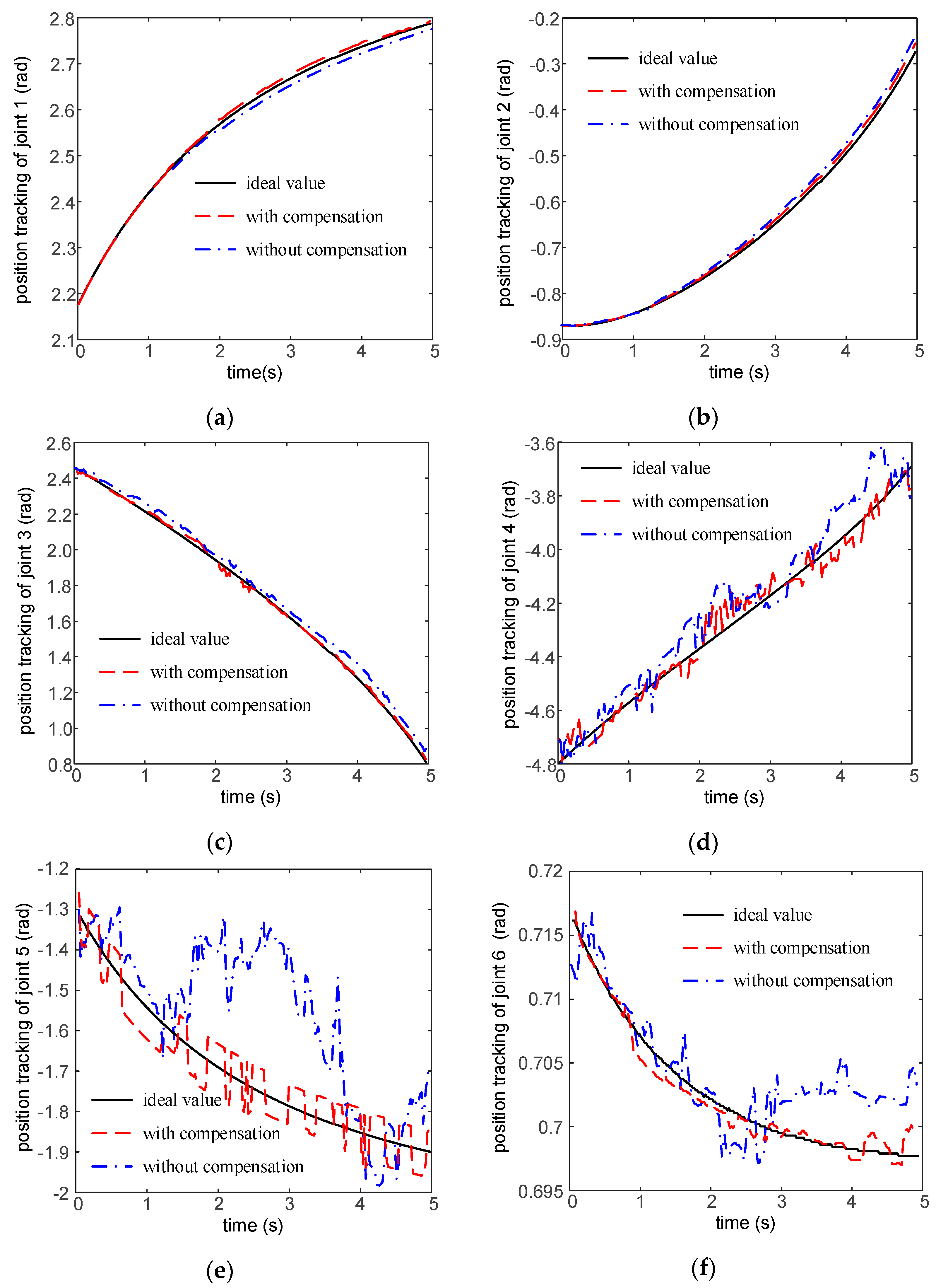
4.2. Experiment Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, W.L.; Xie, H.; Zhang, G.; Yan, S.J.; Yin, Z.P. 3-D Shape Matching of a Blade Surface in Robotic Grinding Applications. IEEE/ASME Trans. Mechatron. 2016, 21, 2294–2306. [Google Scholar] [CrossRef]
- Ng, W.X.; Chan, H.K.; Teo, W.K. Programming a robot for conformance grinding of complex shapes by capturing the tacit knowledge of a skilled operator. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1020–1030. [Google Scholar] [CrossRef]
- Jia, L.; Wang, Y.N.; Zhang, H.; Liu, L. Machine Learning-based Robust Adaptive Control for FFSGR with Actuator Dead zone. In Proceedings of the 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; IEEE: Washington, DC, USA, 2018; pp. 1349–1352. [Google Scholar]
- Hamelin, P.; Bigras, P.; Beaudry, J. Multiobjective optimization of an observer-based controller: Theory and experiments on an underwater grinding robot. IEEE Trans. Control Syst. Technol. 2014, 22, 1875–1882. [Google Scholar] [CrossRef]
- Li, W.L.; Xie, H.; Zhang, G. Hand–Eye Calibration in Visually-Guided Robot Grinding. IEEE Trans. Cybern. 2016, 46, 2634–2642. [Google Scholar] [CrossRef] [PubMed]
- Yu, P. Research and application of piping inside grinding robots in nuclear power plant. Energy Procedia 2017, 127, 54–59. [Google Scholar] [CrossRef]
- Friedl, B. Advanced Control System Design; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Zhonghua, W.; Bo, Y.; Lin, C.; Shusheng, Z. Robust adaptive dead zone compensation of DC servo system. IEE Proc. Control Theory Appl. 2006, 153, 709–713. [Google Scholar] [CrossRef]
- Park, S.H.; Han, S.I. Robust-tracking control for robot manipulator with dead zone and friction using backstepping and RFNN controller. IET Control Theory Appl. 2011, 5, 1397–1417. [Google Scholar] [CrossRef]
- Lewis, F.L. Dead zone compensation in motion control systems using neural networks. IEEE Trans. Autom. Control 2000, 45, 602–613. [Google Scholar]
- Tao, G.; Kokotovic, P.V. Adaptive control of plants with unknown dead-zones. IEEE Trans. Autom. Control 1994, 39, 59–68. [Google Scholar]
- Zhang, Z.; Xu, S.; Zhang, B. Exact tracking control of non-linear systems with time delays and dead-zone input. Automatica 2015, 52, 272–276. [Google Scholar] [CrossRef]
- Saeki, M.; Wada, N.; Satoh, S. Stability analysis of feedback systems with dead-zone non-linearities by circle and Popov criteria. Automatica 2016, 66, 96–100. [Google Scholar] [CrossRef]
- Cui, G.; Wang, Z.; Zhuang, G.; Li, Z.; Chu, Y. Adaptive decentralized NN control of large-scale stochastic non-linear time-delay systems with unknown dead-zone inputs. Neurocomputing 2015, 158, 194–203. [Google Scholar] [CrossRef]
- Gao, Y.; Tong, S.; Li, Y. Fuzzy adaptive output feedback DSC design for SISO non-linear stochastic systems with unknown control directions and dead-zones. Neurocomputing 2015, 167, 187–194. [Google Scholar] [CrossRef]
- Shi, W. Adaptive fuzzy control for multi-input multi-output non-linear systems with unknown dead-zone inputs. Appl. Soft Comput. 2015, 30, 36–47. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y. Neural-adaptive control of single-master–multiple-slaves teleoperation for coordinated multiple mobile manipulators with time-varying communication delays and input uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1400–1413. [Google Scholar] [PubMed]
- Li, Z.; Chen, Z.; Fu, J. Direct adaptive controller for uncertain MIMO dynamic systems with time-varying delay and dead-zone inputs. Automatica 2016, 63, 287–291. [Google Scholar] [CrossRef]
- Zuo, Z.; Li, X.; Shi, Z. L1 adaptive control of uncertain gear transmission servo systems with dead zone non-linearity. ISA Trans. 2015, 58, 67–75. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.B.; Yang, G.H.; Wang, H. Adaptive fuzzy asymptotic tracking control of uncertain nonaffine non-linear systems with non-symmetric dead-zone non-linearities. Inf. Sci. 2016, 348, 1–14. [Google Scholar] [CrossRef]
- Wu, B.; Cao, X.; Xing, L. Robust adaptive control for attitude tracking of spacecraft with unknown dead-zone. Aerosp. Sci. Technol. 2015, 45, 196–202. [Google Scholar] [CrossRef]
- Wu, L.B.; Yang, G.H. Robust adaptive fault-tolerant tracking control of multiple time-delays systems with mismatched parameter uncertainties and actuator failures. Int. J. Robust Non-Linear Control 2015, 25, 2922–2938. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Ma, D. Robust adaptive asymptotic tracking control of a class of non-linear systems with unknown input dead-zone. J. Frankl. Inst. 2015, 352, 5686–5707. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, S.; Zhang, B. Asymptotic tracking control of uncertain non-linear systems with unknown actuator non-linearity. IEEE Trans. Autom. Control 2014, 59, 1336–1341. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Liu, X. Robust adaptive fuzzy tracking control for pure-feedback stochastic non-linear systems with input constraints. IEEE Trans. Cybern. 2013, 43, 2093–2104. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Tong, S.; Li, T. Observer-based adaptive fuzzy tracking control of MIMO stochastic non-linear systems with unknown control directions and unknown dead zones. IEEE Trans. Fuzzy Syst. 2015, 23, 1228–1241. [Google Scholar] [CrossRef]
- Wu, L.B.; Yang, G.H. Adaptive fuzzy tracking control for a class of uncertain nonaffine non-linear systems with dead-zone inputs. Fuzzy Sets Syst. 2016, 290, 1–21. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S. Hybrid adaptive fuzzy control for uncertain MIMO non-linear systems with unknown dead-zones. Inf. Sci. 2016, 328, 97–114. [Google Scholar] [CrossRef]
- Wu, L.; Yang, X.; Lam, H.K. Dissipativity analysis and synthesis for discrete-time T–S fuzzy stochastic systemswith time-varying delay. IEEE Trans. Fuzzy Syst. 2014, 22, 380–394. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S. Adaptive fuzzy output-feedback control of pure-feedback uncertain non-linear systems with unknown dead zone. IEEE Trans. Fuzzy Syst. 2014, 22, 1341–1347. [Google Scholar] [CrossRef]
- Tong, S.; Wang, T.; Li, Y. Adaptive neural network output feedback control for stochastic non-linear systems with unknown dead-zone and unmodeled dynamics. IEEE Trans. Cybern. 2014, 44, 910–921. [Google Scholar] [CrossRef]
- Sui, S.; Tong, S.; Li, Y. Observer-based adaptive fuzzy decentralized control for stochastic large-scale non-linear systems with unknown dead-zones. Inf. Sci. 2014, 259, 71–86. [Google Scholar] [CrossRef]
- Wu, J.; Chen, W.; Yang, F. Global adaptive neural control for strict-feedback time-delay systems with predefined output accuracy. Inf. Sci. 2015, 301, 27–43. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, X.; Zhang, C. Neural network based boundary control of a vibrating string system with input deadzone. Neurocomputing 2018, 275, 1021–1027. [Google Scholar] [CrossRef]
- Zhao, X.; Shi, P.; Zheng, X. Adaptive tracking control for switched stochastic non-linear systems with unknown actuator dead-zone. Automatica 2015, 60, 193–200. [Google Scholar] [CrossRef]
- He, W.; Dong, Y.; Sun, C. Adaptive neural network control of unknown non-linear affine systems with input dead zone and output constraint. ISA Trans. 2015, 58, 96–104. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Gong, M.Z.; Liu, Y.J. Neural network-based adaptive control for a class of chemical reactor systems with non-symmetric dead-zone. Neurocomputing 2016, 174, 597–604. [Google Scholar] [CrossRef]
- Wang, H.Q.; Chen, B.; Lin, C. Adaptive neural tracking control for a class of stochastic non-linear systems with unknown dead-zone. Int. J. Innov. Comput. Inf. Control 2013, 9, 3257–3269. [Google Scholar]
- Hsu, C.F.; Lin, C.M.; Yeh, R.G. Supervisory adaptive dynamic RBF-based neural-fuzzy control system design for unknown non-linear systems. Appl. Soft Comput. 2013, 13, 1620–1626. [Google Scholar] [CrossRef]
- Han, S.I.; Lee, J.M. Backstepping sliding mode control with FWNN for strict output feedback non-smooth non-linear dynamic system. Int. J. Control. Syst. 2013, 11, 398–409. [Google Scholar] [CrossRef]
- Van, P.C.; Wang, Y.N. Robust Adaptive Trajectory Tracking Sliding mode control based on Neural networks for Cleaning and Detecting Robot Manipulators. J. Intell. Robot. Syst. 2015, 79, 101–114. [Google Scholar]
- Lu, Y.; Liu, J.K.; Sun, F.C. Actuator non-linearities compensation using RBF neural networks in robot control system. In Proceedings of the Multiconference on Computational Engineering in Systems Applications (IMACS), Beijing, China, 4–6 October 2006; Volume 1, pp. 231–238. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, L.; Wang, Y.; Zhang, C.; Zhao, K.; Liu, L.; Nguyen, X.Q. A Robust Adaptive Trajectory Tracking Algorithm Using SMC and Machine Learning for FFSGRs with Actuator Dead Zones. Appl. Sci. 2019, 9, 3837. https://doi.org/10.3390/app9183837
Jia L, Wang Y, Zhang C, Zhao K, Liu L, Nguyen XQ. A Robust Adaptive Trajectory Tracking Algorithm Using SMC and Machine Learning for FFSGRs with Actuator Dead Zones. Applied Sciences. 2019; 9(18):3837. https://doi.org/10.3390/app9183837
Chicago/Turabian StyleJia, Lin, Yaonan Wang, Changfan Zhang, Kaihui Zhao, Li Liu, and Xuan Quynh Nguyen. 2019. "A Robust Adaptive Trajectory Tracking Algorithm Using SMC and Machine Learning for FFSGRs with Actuator Dead Zones" Applied Sciences 9, no. 18: 3837. https://doi.org/10.3390/app9183837
APA StyleJia, L., Wang, Y., Zhang, C., Zhao, K., Liu, L., & Nguyen, X. Q. (2019). A Robust Adaptive Trajectory Tracking Algorithm Using SMC and Machine Learning for FFSGRs with Actuator Dead Zones. Applied Sciences, 9(18), 3837. https://doi.org/10.3390/app9183837