Thermal Infrared Small Ship Detection in Sea Clutter Based on Morphological Reconstruction and Multi-Feature Analysis

Abstract
1. Introduction
2. Morphological Reconstruction and Multi-feature Analysis for TIR Ship Images
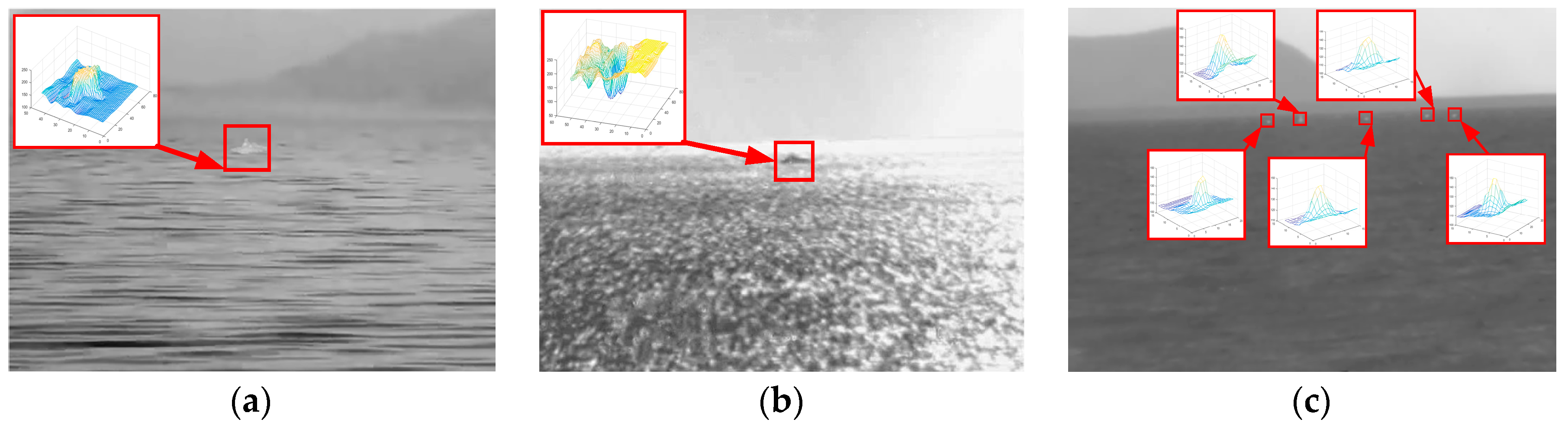
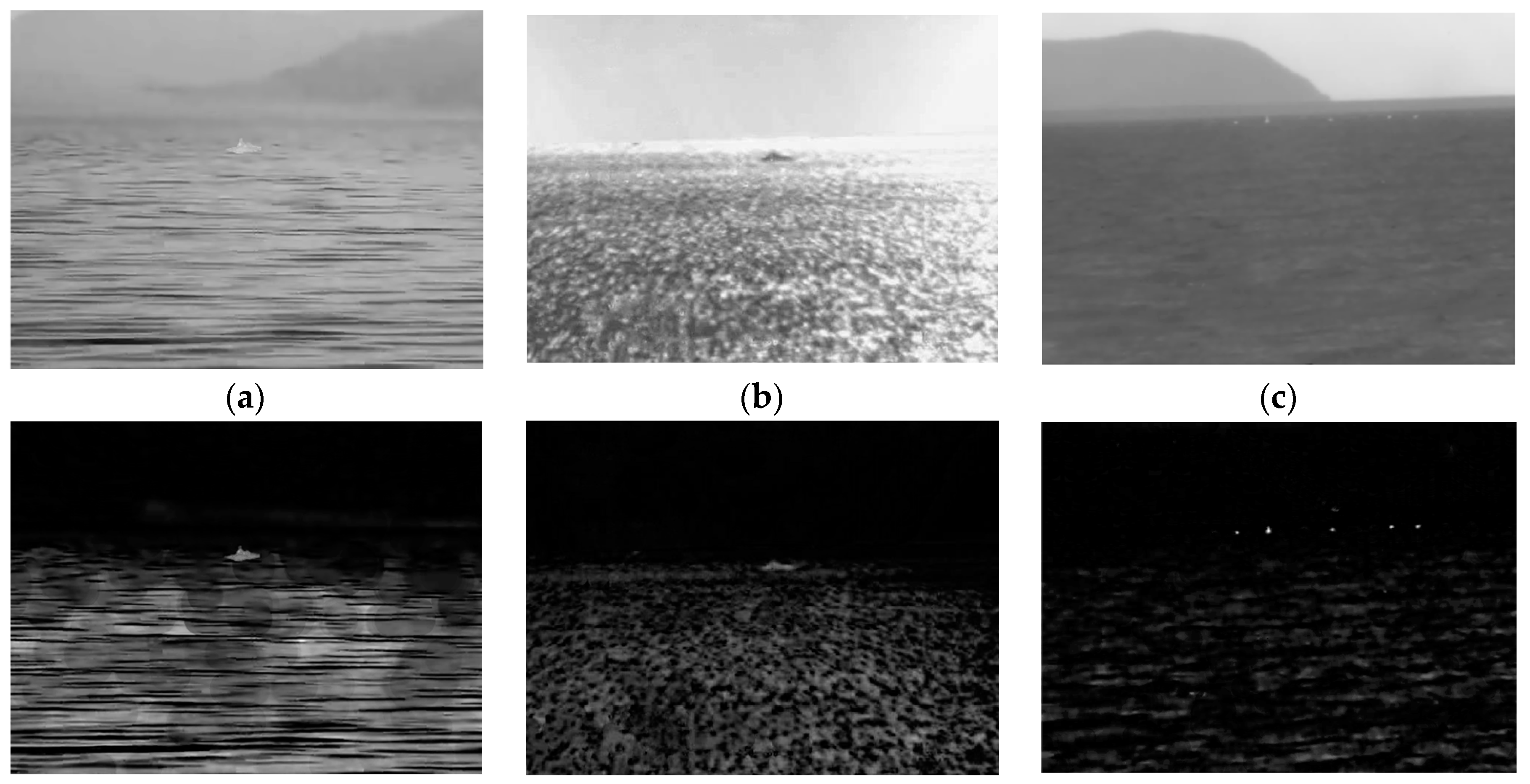
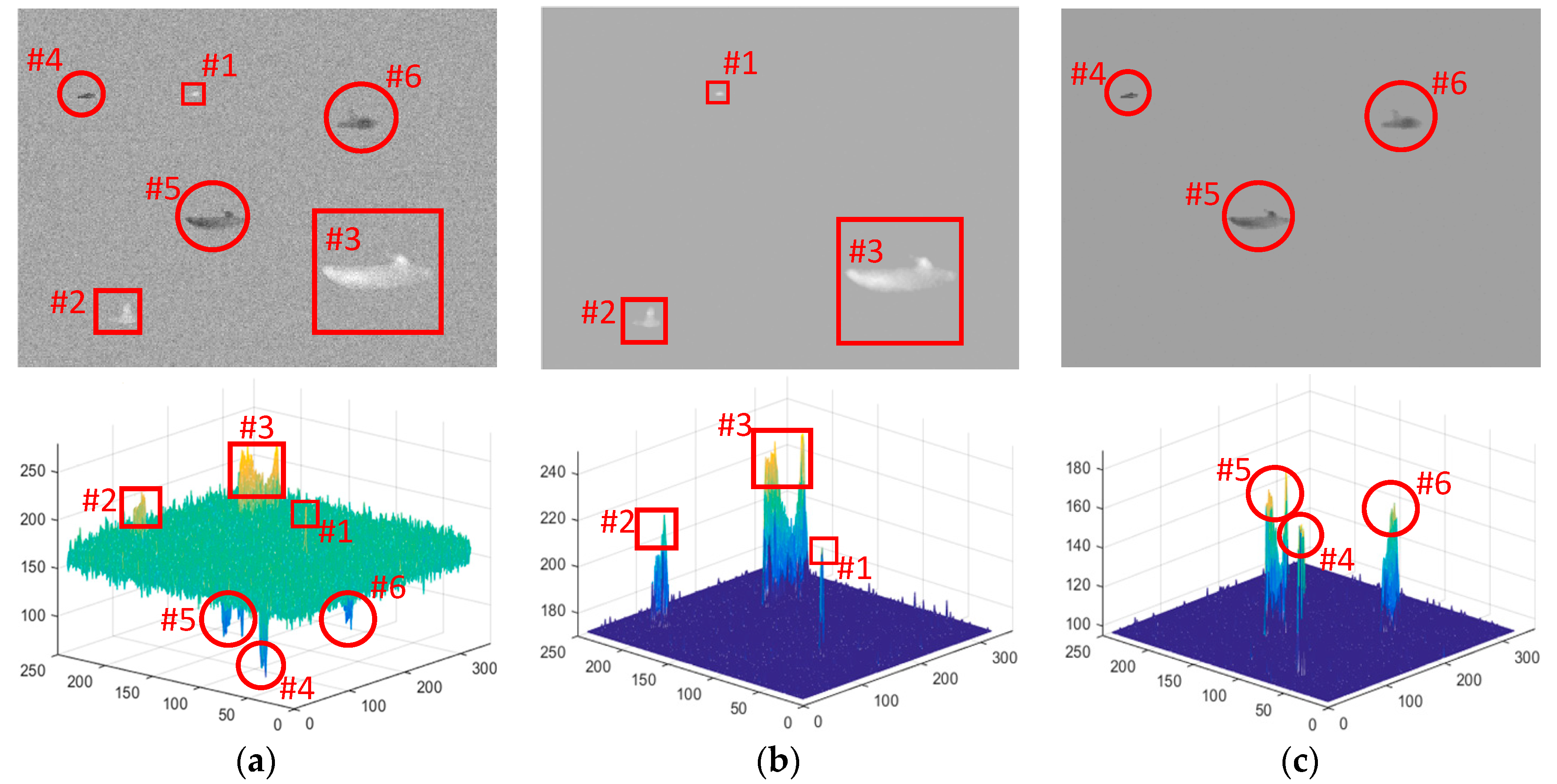
2.1. Characters of Small Ship Targets and Sea Clutter in TIR Image
2.2. Gray-Level Morphological Reconstruction for Sea Clutter Suppression and Saliency Detection
2.2.1. Application of Classical Mathematical Morphology in TIR Image Processing
2.2.2. Pre-Processing and Intensity Foreground Saliency Detection
2.2.3. Brightness Contrast Saliency Detection
2.3. Saliency Map Fusion Based on Gray-Level Morphological Reconstruction
2.4. Ship Target Verification Based on Contour Description and Shape Constraint
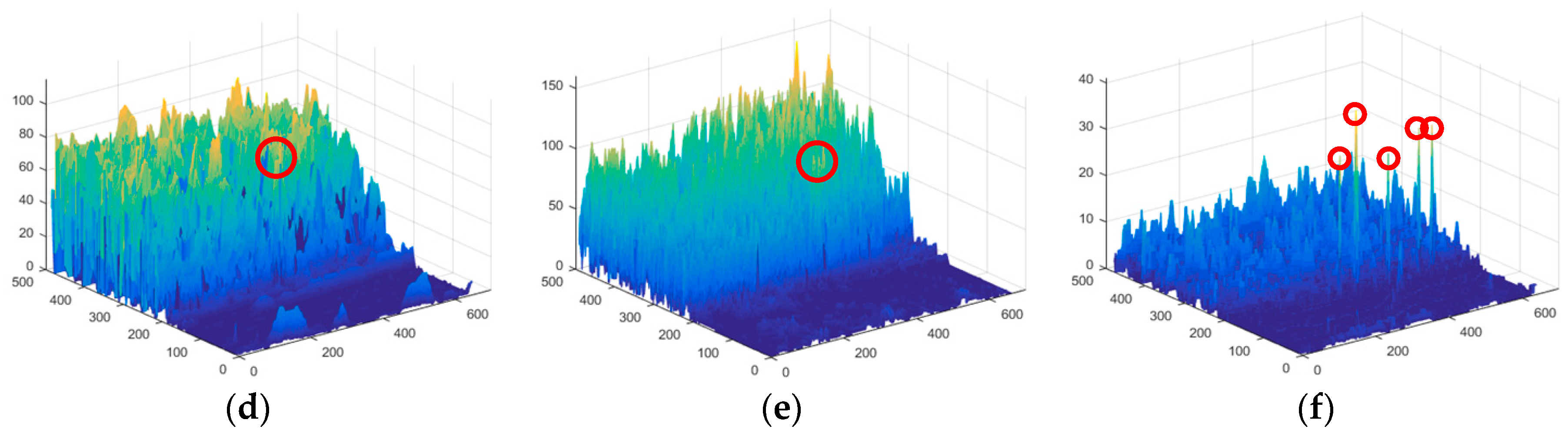
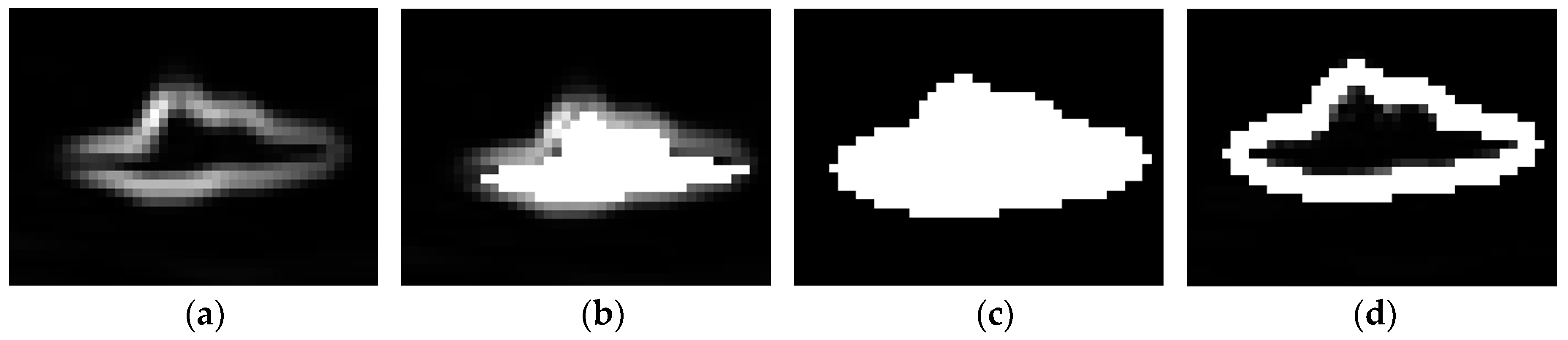
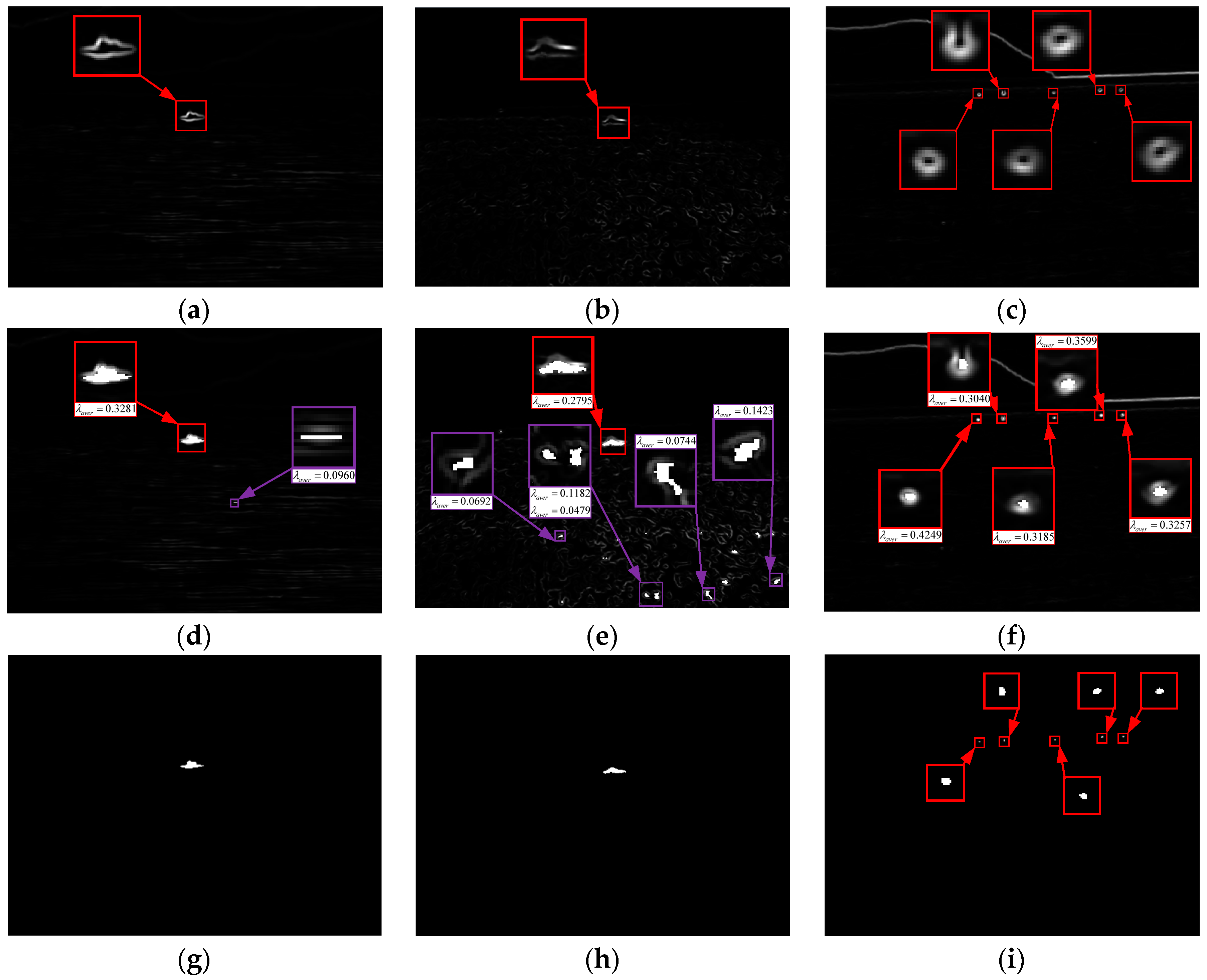
2.4.1. Contour Description of TIR Ship Based on Eigenvalue Analysis of Structure Tensor
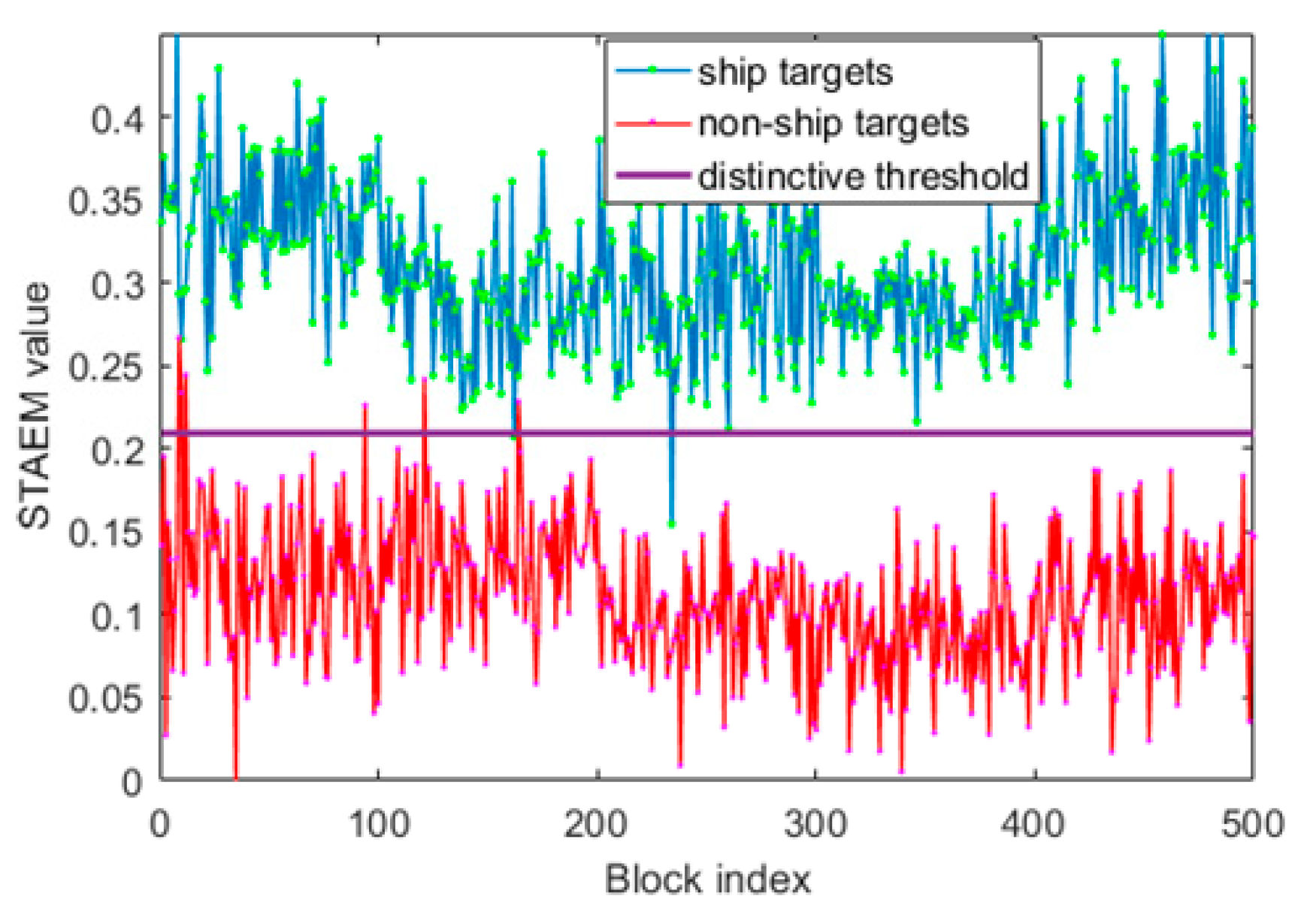
2.4.2. Shape Constraint for TIR Ship Identification Based on Statistical Knowledge
3. Ship Target Detection based on Morphological Reconstruction and Multi-feature Analysis
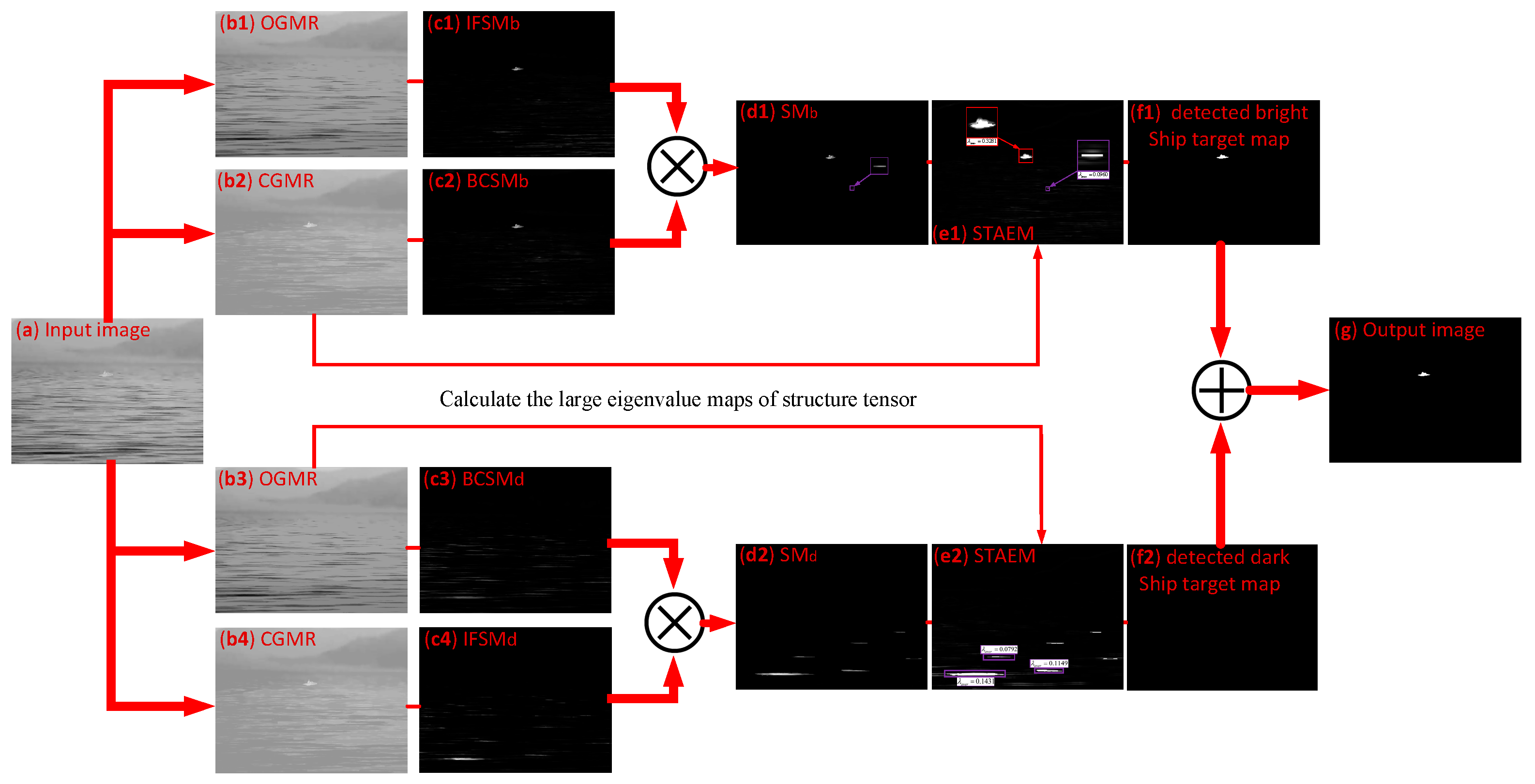
3.1. Proposed Bright Ship Target Detection in TIR Images
| Algorithm 1. Proposed saliency map fusion algorithm for TIR bright ship image |
| Input: TIR ship target image , structuring element . |
| Output: Binary final saliency map for bright ship target image . |
| Step 1: Perform the opening operation with structuring element on to acquire using (4). |
| Step 2: Compute the elementary geodesic dilation according to (9). |
| Step 3: Reconstruct from based on OGMR derived from (8). |
| Step 4: Obtain the intensity foreground saliency map of according to (10) |
| Step 5: Normalize the intensity foreground saliency map using (16). |
| Step 6: Perform the closing operation on to acquire using (5). |
| Step 7: Compute the elementary geodesic erosion according to (12). |
| Step 8: Acquire the pre-processing result by reconstructing from based on CGMR derived from (11). |
| Step 9: Calculate the brightness contrast saliency map on pre-processed image using (14). |
| Step 10: Normalize the brightness contrast saliency map according to (16). |
| Step 11: Generate the final saliency map based on pixel-wise multiplication fusion manner according to (17). |
| Step 12: Calculate the adaptive threshold according to (19). |
| Step 13: Acquire the binary segmentation result of the final saliency map according to (20) |
| Algorithm 2. Proposed two-step ship verification strategy for TIR ship image |
| Input: Pre-processed image , binary final saliency map for ship target image , and the distinctive threshold . |
| Output: Detected TIR ship target map. |
| Step 1: Compute the regularized structure tensor of pre-processed image according to (21). |
| Step 2: Calculate the normalized large eigenvalue map of matrix according to (22). |
| Step 3: Label the connected regions of with numbers, and obtain the total number of connected regions in . |
| Step 4: for label index k = 1: do |
| Compute the average eigenvalue measure of structure tensor (STAEM) of k-th connected region according to (23). |
| Eliminate the k-th connected region if the is smaller than distinctive threshold . |
| end for |
| Step 5: Obtain the map of candidate ship targets and acquire the total number of candidate ship targets. |
| Step 6: for candidate ship index t = 1: do |
| Compute the shape description parameters of t-th candidate region according to (24)–(26). |
| Exclude the non-ship targets if their computed shape description parameters are not within the ranges of Table 2. |
| end for |
| Step 7: Acquire the output detected ship target map and target position |
3.2. Proposed Small Ship Target Detection in TIR Images
4. Experimental Results
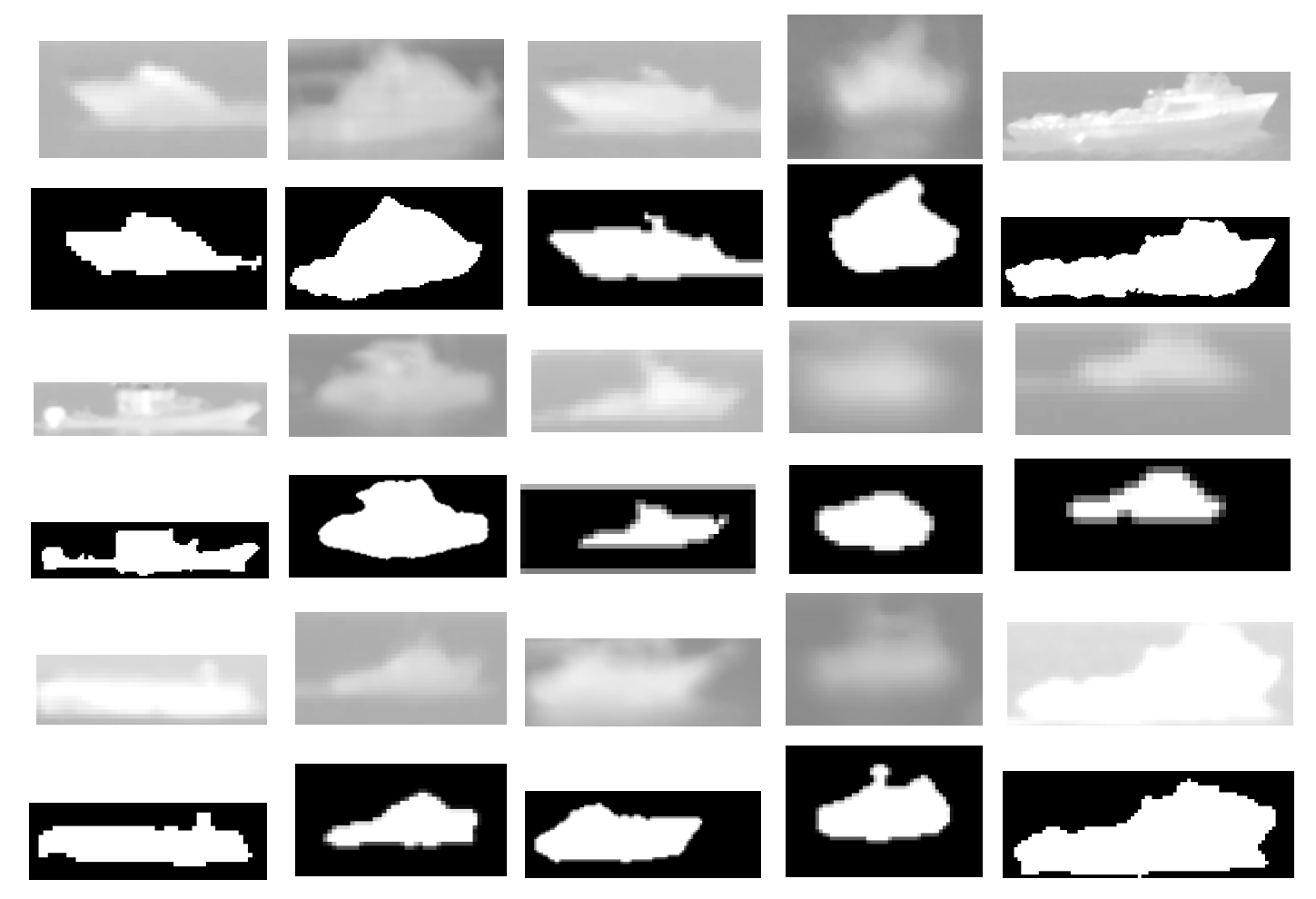
4.1. Test Dataset
4.2. Results of TIR Ship Detection
4.2.1. Effects of Parameters
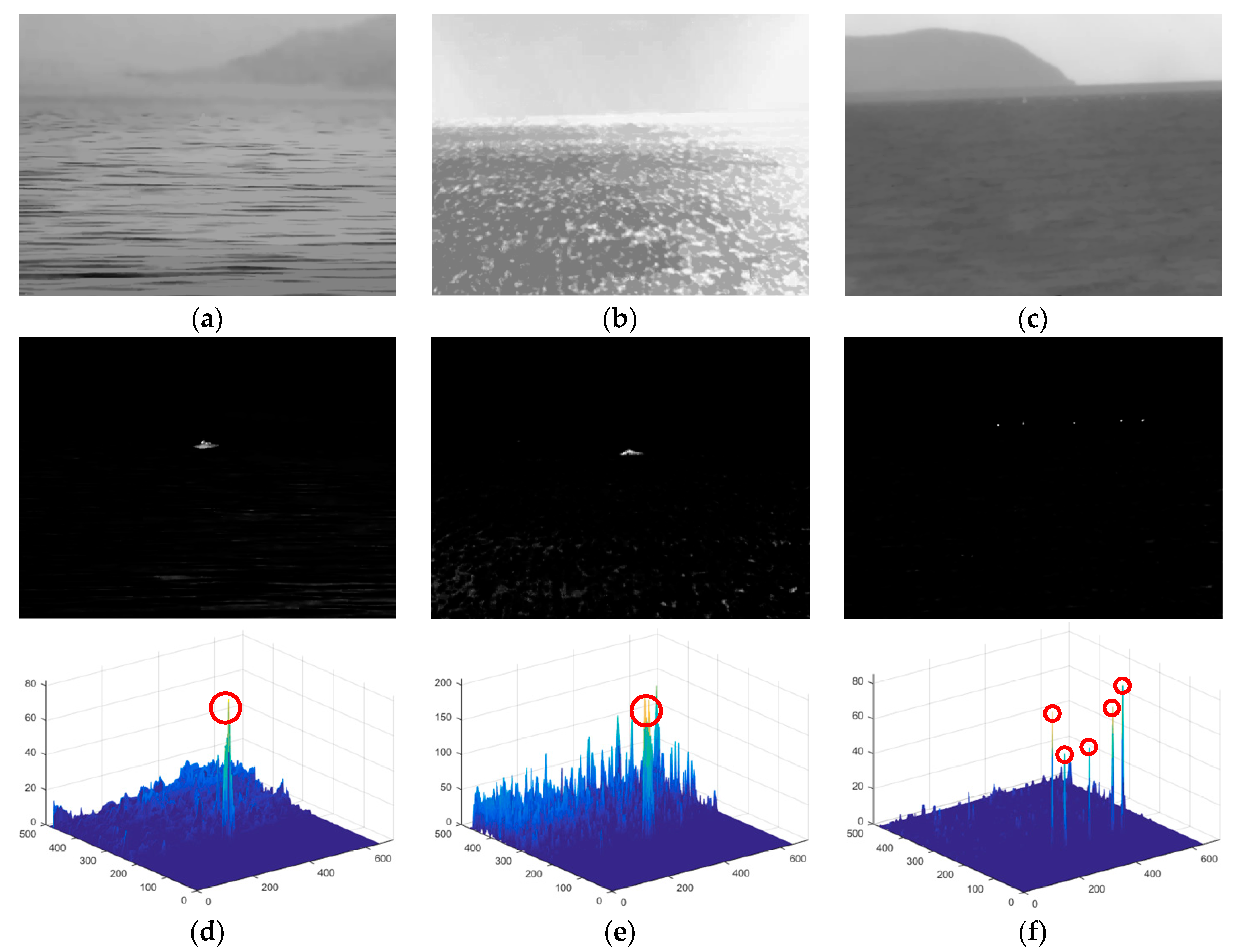
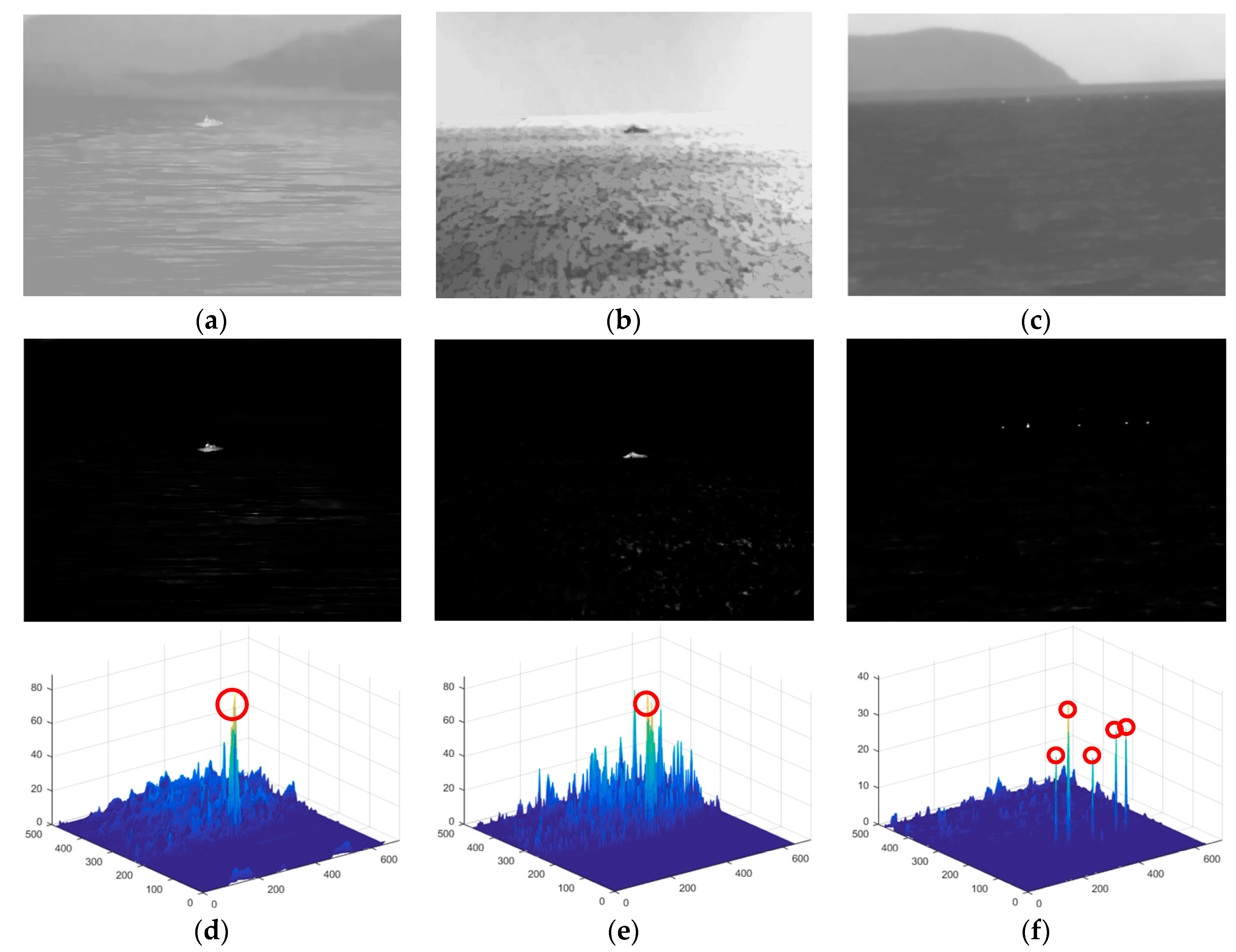
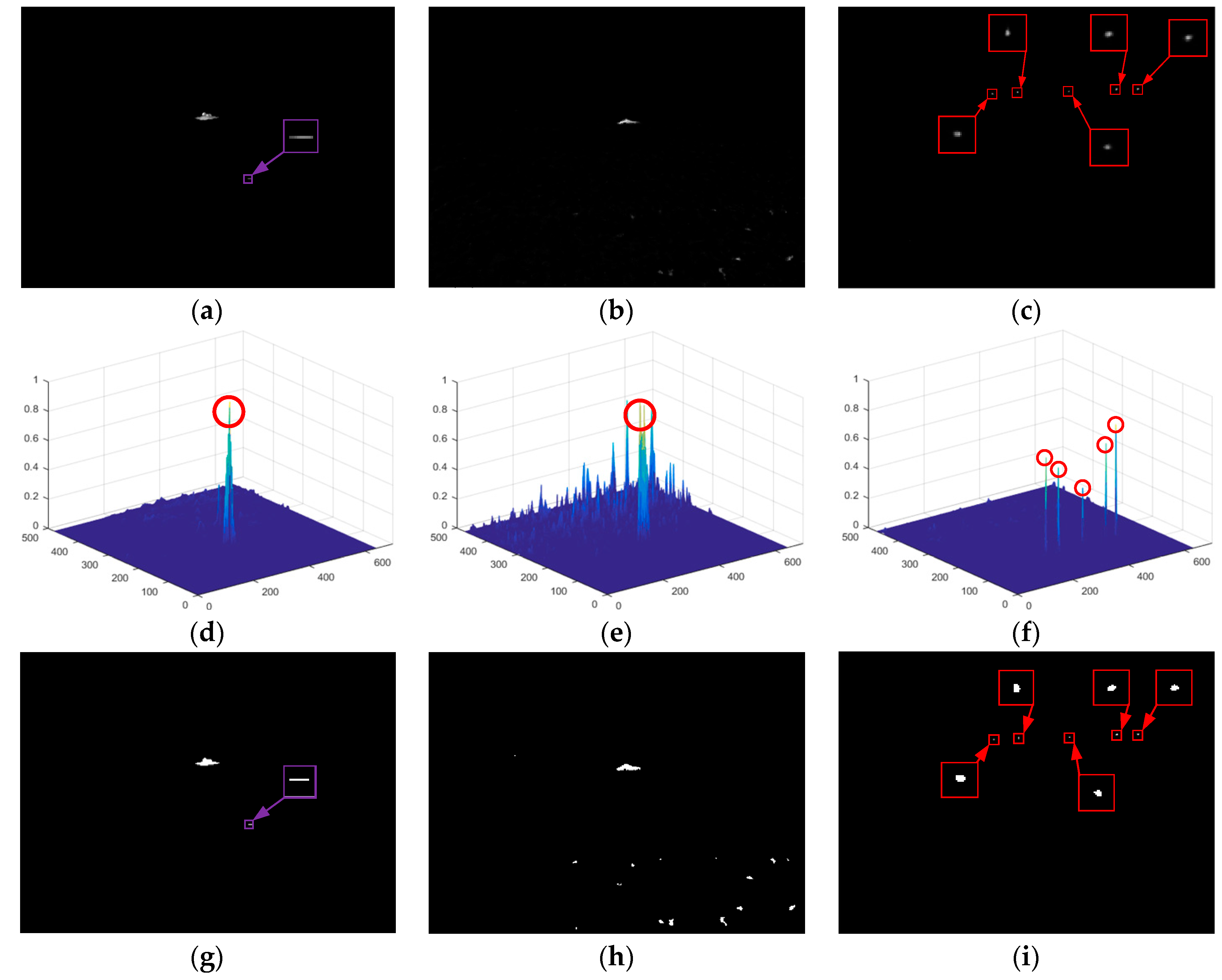
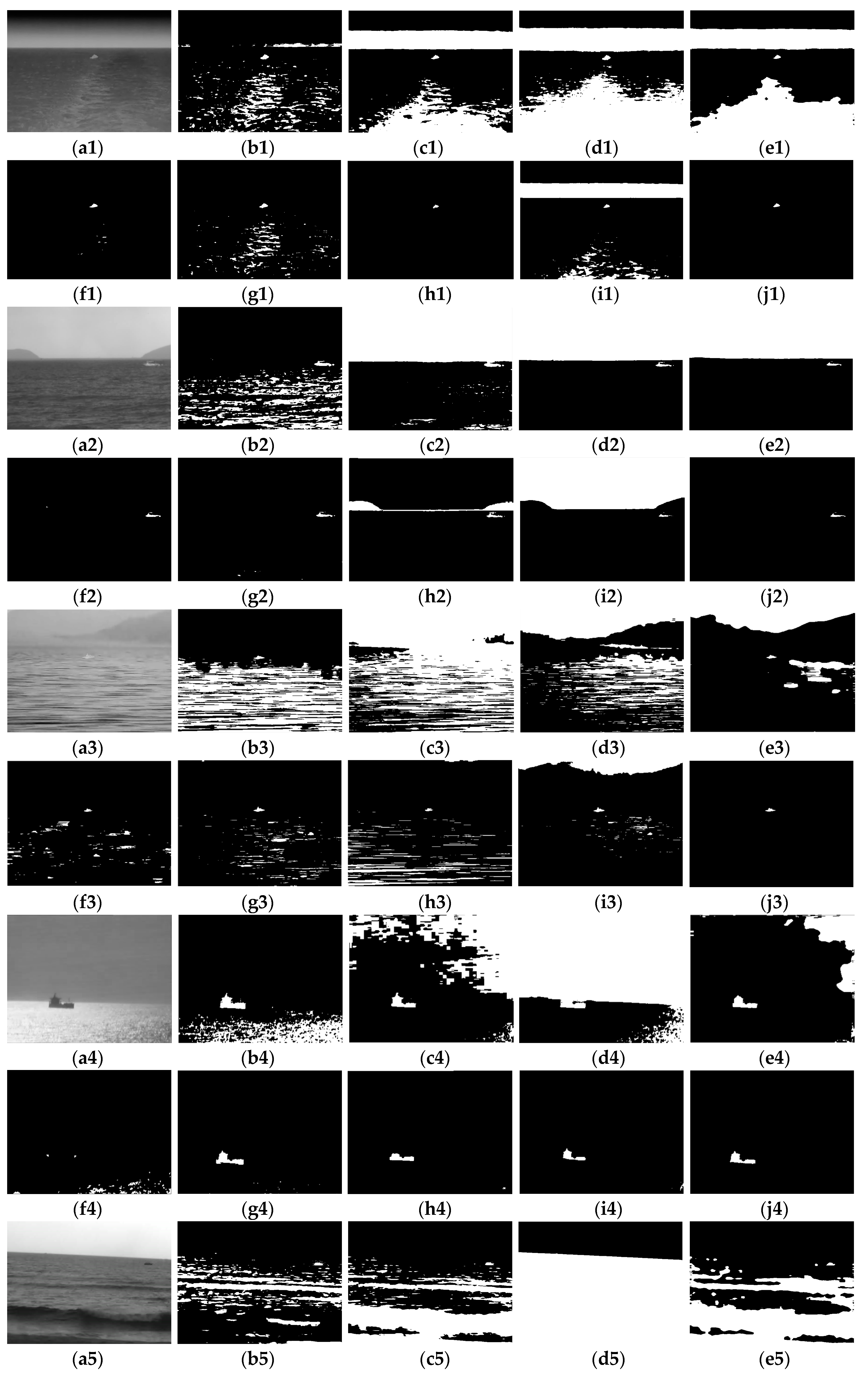
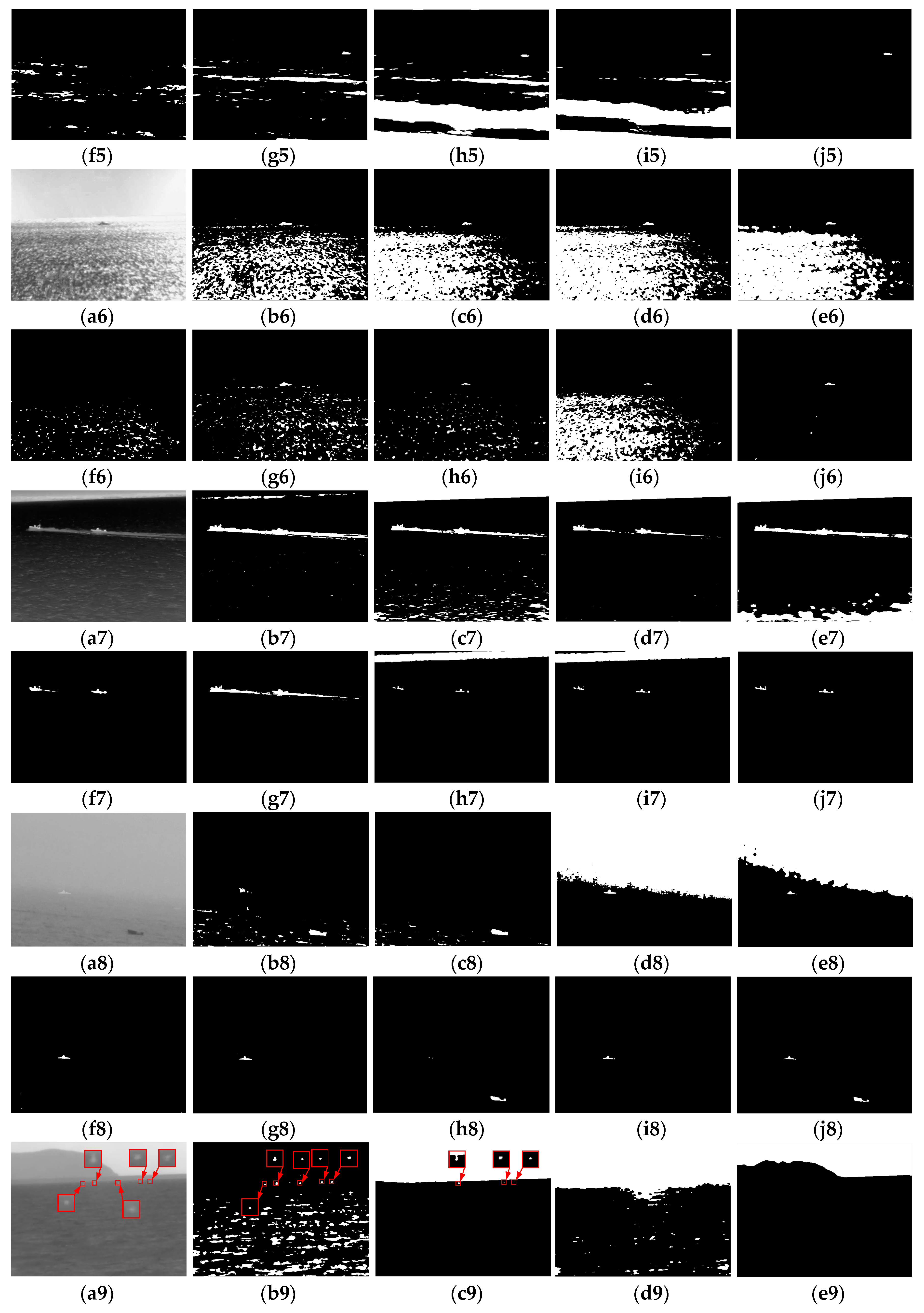
4.2.2. Visual Comparison to TIR Ship Target Detection Baseline Methods
4.2.3. Quantitative Comparison to TIR Ship Target Detection Baseline Methods
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Prasad, D.K.; Rajan, D.; Rachmawati, L.; Rajabally, E.; Quek, C. Video Processing from electro-optical sensors for object detection and tracking in a maritime environment: A survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1993–2016. [Google Scholar] [CrossRef]
- Prasad, D.; Krishna Prasath, C.; Rajan, D.; Rachmawati, L.; Rajabally, E.; Quek, C. Object detection in a maritime environment: Performance evaluation of background subtraction methods. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1787–1802. [Google Scholar] [CrossRef]
- Bai, X.; Chen, Z.; Zhang, Y.; Liu, Z.; Lu, Y. Infrared ship target segmentation based on spatial information improved FCM. IEEE Trans. Cybern. 2016, 46, 3259–3271. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Wang, B.; Zhao, M.; Xu, W. Robust infrared maritime target detection based on visual attention and spatiotemporal filtering. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3037–3050. [Google Scholar] [CrossRef]
- Wan, M.; Ren, K.; Gu, G.; Zhang, X.; Qian, W.; Chen, Q.; Yu, S. Infrared small moving target detection via saliency histogram and geometrical invariability. Appl. Sci. 2017, 7, 569. [Google Scholar] [CrossRef]
- Hu, W.H.; Xu, K.Y.; Shi, C.J. Target detection and tracking based on ship borne infrared imagery. Key Eng. Mater. 2010, 439, 546–551. [Google Scholar] [CrossRef]
- Kim, S.; Choi, B.; Kim, J.; Kwon, S.; Kim, K.-T. Three plot correlation-based small infrared target detection in dense sun-glint environment for infrared search and track. Signal Data Process. Small Targets 2012, 2012, 83930T. [Google Scholar]
- Rodriguez-Blanco, M.; Golikov, V. Multiframe GLRT-Based adaptive detection of multipixel targets on a sea surface. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5506–5512. [Google Scholar] [CrossRef]
- Lagaras, S.E.; Uzunoglu, N.K. A Model for the passive infrared detection of naval targets through FLIR: Model description and preliminary results applicable in the eastern Mediterranean Sea. Int. J. Infrared Millim. Waves 2008, 29, 596–607. [Google Scholar] [CrossRef]
- Wang, H.; Zou, Z.; Shi, Z.; Li, B. Detecting ship targets in spaceborne infrared image based on modeling radiation anomalies. Infrared Phys. Technol. 2017, 85, 141–146. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J. Small infrared target detection by region-adaptive clutter rejection for sea-based infrared search and track. Sensors 2014, 14, 13210–13242. [Google Scholar] [CrossRef] [PubMed]
- Kim, S. Double layered-background removal filter for detecting small infrared targets in heterogenous backgrounds. J. Infrared Millim. Terahertz Waves 2010, 32, 79–101. [Google Scholar] [CrossRef]
- Wang, B.; Dong, L.; Zhao, M.; Xu, W. Fast infrared maritime target detection: Binarization via histogram curve transformation. Infrared Phys. Technol. 2017, 83, 32–44. [Google Scholar] [CrossRef]
- Zhou, A.; Xie, W.; Pei, J. Infrared maritime target detection using the high order statistic filtering in fractional Fourier domain. Infrared Phys. Technol. 2018, 91, 123–136. [Google Scholar] [CrossRef]
- Tian-Xu, Z.; Guang-Zhou, Z.; Fei, W.; Xi, Z.G. Fast recursive algorithm for infrared ship image segmentation. J. Infrared Millim. Waves 2006, 25, 295. [Google Scholar]
- Hai-Ying, X.; Xiao-Feng, L.; Zai-Ming, L. Noise suppression and detection of infrared target based on region segmentation. J. Infrared Millim. Waves 2008, 27, 269–274. [Google Scholar]
- Feng, D.; Wenkang, S.; Liangzhou, C.; Yong, D.; Zhenfu, Z. Infrared image segmentation with 2-D maximum entropy method based on particle swarm optimization (PSO). Pattern Recognit. Lett. 2005, 26, 597–603. [Google Scholar] [CrossRef]
- Liu, Z.; Bai, X.; Sun, C.; Zhou, F.; Li, Y. Multi-Modal Ship Target Image Smoothing Based on Adaptive Mean Shift. IEEE Access 2018, 6, 12573–12586. [Google Scholar] [CrossRef]
- Tao, W.; Jin, H.; Liu, J. Unified mean shift segmentation and graph region merging algorithm for infrared ship target segmentation. Opt. Eng. 2007, 46, 127002. [Google Scholar] [CrossRef]
- Fang, L.; Wang, X.; Wan, Y. Adaptable active contour model with applications to infrared ship target segmentation. J. Electron. Imaging 2016, 25, 041010. [Google Scholar] [CrossRef]
- Fang, L.; Zhao, W.; Li, X.; Wang, X. A convex active contour model driven by local entropy energy with applications to infrared ship target segmentation. Opt. Laser Technol. 2017, 96, 166–175. [Google Scholar] [CrossRef]
- Mumtaz, A.; Jabbar, A.; Mahmood, Z.; Nawaz, R.; Ahsan, Q. Saliency based algorithm for ship detection in infrared images. In Proceedings of the 2016 13th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 12–16 January 2016; pp. 167–172. [Google Scholar]
- Liu, Z.; Zhou, F.; Chen, X.; Bai, X.; Sun, C. Iterative infrared ship target segmentation based on multiple features. Pattern Recognit. 2014, 47, 2839–2852. [Google Scholar] [CrossRef]
- Liu, Z.; Bai, X.; Sun, C.; Zhou, F.; Li, Y. Infrared ship target segmentation through integration of multiple feature maps. Image Vis. Comput. 2016, 48, 14–25. [Google Scholar] [CrossRef]
- Bai, X.; Liu, M.; Wang, T.; Chen, Z.; Wang, P.; Zhang, Y. Feature based fuzzy inference system for segmentation of low-contrast infrared ship images. Appl. Soft Comput. 2016, 46, 128–142. [Google Scholar] [CrossRef]
- Gray, G.J.; Aouf, N.; Richardson, M.; Butters, B.; Walmsley, R. Countermeasure effectiveness against an intelligent imaging infrared anti-ship missile. Opt. Eng. 2013, 52, 026401. [Google Scholar] [CrossRef]
- Khellal, A.; Ma, H.; Fei, Q. Convolutional neural network based on extreme learning machine for maritime ships recognition in infrared images. Sensors 2018, 18, 1490. [Google Scholar] [CrossRef] [PubMed]
- Hwang, J.-I.; Chae, S.-H.; Kim, D.; Jung, H.-S. Application of Artificial Neural Networks to Ship Detection from X-Band Kompsat-5 Imagery. Appl. Sci. 2017, 7, 961. [Google Scholar] [CrossRef]
- Kim, K.; Hong, S.; Choi, B.; Kim, E. Probabilistic Ship Detection and Classification Using Deep Learning. Appl. Sci. 2018, 8, 936. [Google Scholar] [CrossRef]
- Jiang, B.; Ma, X.; Lu, Y.; Li, Y.; Feng, L.; Shi, Z. Ship detection in spaceborne infrared images based on Convolutional Neural Networks and synthetic targets. Infrared Phys. Technol. 2018, 97, 229–234. [Google Scholar] [CrossRef]
- Zhang, M.M.; Choi, J.; Daniilidis, K.; Wolf, M.T.; Kanan, C. VAIS: A dataset for recognizing maritime imagery in the visible and infrared spectrums. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Boston, MA, USA, 8–10 June 2015; pp. 10–16. [Google Scholar]
- Stewart, S.M. Blackbody radiation functions and polylogarithms. J. Quant. Spectrosc. Radiat. Transf. 2012, 113, 232–238. [Google Scholar] [CrossRef]
- Valluri, S.R.; Jeffrey, D.J.; Corless, R.M. Some applications of the Lambert W function to physics. Can. J. Phys. 2000, 78, 823–831. [Google Scholar]
- Bai, X.; Zhou, F.; Jin, T. Enhancement of dim small target through modified top-hat transformation under the condition of heavy clutter. Signal Process. 2010, 90, 1643–1654. [Google Scholar] [CrossRef]
- Withagen, P.; Schutte, K.; Vossepoel, A.; Breuers, M.G.J. Automatic classification of ships from infrared (FLIR) images. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VIII, Proceedings of SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 5–9 April 1999; pp. 180–187. [Google Scholar]
- Ouma, Y.O.; Hahn, M. Pothole detection on asphalt pavements from 2D-colour pothole images using fuzzy c -means clustering and morphological reconstruction. Autom. Constr. 2017, 83, 196–211. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, Z.; Jiao, T.; Wang, M. Defect Detection of Aluminum Alloy Wheels in Radiography Images Using Adaptive Threshold and Morphological Reconstruction. Appl. Sci. 2018, 8, 2365. [Google Scholar] [CrossRef]
- Vincent, L. Morphological grayscale reconstruction in image analysis: Applications and efficient algorithms. IEEE Trans. Image Process. 1993, 2, 176–201. [Google Scholar] [CrossRef] [PubMed]
- Köthe, U. Edge and Junction Detection with an Improved Structure Tensor. Pattern Recognit. 2003, 2781, 25–32. [Google Scholar]
- Sertcelik, I.; Kafadar, O. Application of edge detection to potential field data using eigenvalue analysis of structure tensor. J. Appl. Geophys. 2012, 84, 86–94. [Google Scholar] [CrossRef]
- Guo, W.; Xia, X.; Xiaofei, W. A remote sensing ship recognition method based on dynamic probability generative model. Expert Syst. Appl. 2014, 41, 6446–6458. [Google Scholar] [CrossRef]
- Wang, B.; Dong, L.; Zhao, M.; Wu, H.; Ji, Y.; Xu, W. An infrared maritime target detection algorithm applicable to heavy sea fog. Infrared Phys. Technol. 2015, 71, 56–62. [Google Scholar] [CrossRef]
- Bartovský, J.; Dokládal, P.; Faessel, M.; Dokladalova, E.; Bilodeau, M. Morphological co-processing unit for embedded devices. J. Real-Time Image Process. 2015, 15, 775–786. [Google Scholar] [CrossRef]
- Quesada-Barriuso, P.; Arguello, F.; Heras, D.B.; Benediktsson, J.A. Wavelet-Based Classification of Hyperspectral Images Using Extended Morphological Profiles on Graphics Processing Units. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2015, 8, 2962–2970. [Google Scholar] [CrossRef]
- PETS 2016 Maritime Dataset. Available online: http://www.cvg.reading.ac.uk/PETS2016/a.html (accessed on 16 December 2018).
- Otsu, N.A. Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Ning, J.; Zhang, L.; Zhang, D.; Wu, C. Interactive image segmentation by maximal similarity based region merging. Pattern Recognit. 2010, 43, 445–456. [Google Scholar] [CrossRef]
- Yi, W.; Morelande, M.R.; Kong, L.; Yang, J. An Efficient Multi-Frame Track-Before-Detect Algorithm for Multi-Target Tracking. IEEE J. Sel. Topics Signal. Process. 2013, 7, 421–434. [Google Scholar] [CrossRef]
- Hwang, J.-N.; Jiang, X.; Zhou, Q.; Yang, Q.; Li, J.; Xing, J.; Chen, W. A maritime targets detection method based on hierarchical and multi-scale deep convolutional neural network. In Proceedings of the Tenth International Conference on Digital Image Processing (ICDIP 2018), Shanghai, China, 11–14 May 2018. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radiations | Wavelength (µm) | Temperatures of Blackbody (K) | Temperatures of Blackbody (°C) |
|---|---|---|---|
| VIS | 0.38~0.75 µm | 3865.07~7628.42 | 3591.92~7355.27 |
| NIR | 0.75~3 µm | 966.27~3865.07 | 693.12~3591.92 |
| TIR | 3~15 µm | 193.25~966.27 | −79.9~693.12 |
| Measure | Min | Average | Max |
|---|---|---|---|
| 1.1002 | 3.5105 | 8.7857 | |
| 11.2813 | 48.1344 | 118.6254 | |
| 0.3826 | 0.6025 | 0.8769 |
| Sequences | Seq1 | Seq2 | Seq3 | Seq4 | Seq5 | Seq6 | Seq7 | Seq8 | Seq9 |
|---|---|---|---|---|---|---|---|---|---|
| Image size | 640 × 480 | 640 × 480 | 640 × 480 | 320 × 240 | 640 × 480 | 640 × 480 | 640 × 480 | 640 × 480 | 640 × 480 |
| Sea clutter complexity | Medium | Medium | High | Medium | High | High | High | Low | High |
| Target area | 112~308 | 355~513 | 323~487 | 781~1557 | 95~291 | 246~767 | 195~304 | 279~1034 | 6~50 |
| Target brightness | Bright | Bright | Bright | Dark | Dark | Dark | Bright | Bright/dark | Bright |
| Target number | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 5 |
| Total images | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 |
| Metrics | Methods | Seq1 | Seq2 | Seq3 | Seq4 | Seq5 | Seq6 | Seq7 | Seq8 | Seq9 | Average |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ME | THF/BHF | 0.0826 | 0.1341 | 0.3606 | 0.0545 | 0.2172 | 0.2433 | 0.0383 | 0.0126 | 0.0882 | 0.1368 |
| 2DME | 0.3133 | 0.4516 | 0.6720 | 0.2610 | 0.5216 | 0.2858 | 0.0815 | 0.0097 | 0.1849 | 0.3090 | |
| 2DO | 0.4017 | 0.4194 | 0.3531 | 0.7029 | 0.7139 | 0.4183 | 0.0710 | 0.6084 | 0.2778 | 0.4729 | |
| MSS | 0.4589 | 0.4214 | 0.1508 | 0.0517 | 0.3813 | 0.3370 | 0.1094 | 0.5073 | 0.1365 | 0.2838 | |
| IMFS | 0.0048 | 0.0032 | 0.0191 | 0.0170 | 0.0243 | 0.0289 | 0.0030 | 0.0018 | 0.0009 | 0.0114 | |
| IFCM | 0.0405 | 0.0047 | 0.0522 | 0.0091 | 0.0462 | 0.0899 | 0.0217 | 0.0022 | 0.0014 | 0.0298 | |
| CVM | 0.0018 | 0.0257 | 0.0954 | 0.0105 | 0.2143 | 0.0523 | 0.0597 | 0.0016 | 0.0013 | 0.0514 | |
| HCST | 0.1285 | 0.3937 | 0.1069 | 0.0062 | 0.1635 | 0.2187 | 0.0315 | 0.0025 | 0.0011 | 0.1170 | |
| Proposed | 0.0016 | 0.0023 | 0.0031 | 0.0045 | 0.0104 | 0.0047 | 0.0018 | 0.0012 | 0.0005 | 0.0033 | |
| RAE | THF/BHF | 0.3978 | 0.6005 | 0.3553 | 0.3297 | 0.3099 | 0.4198 | 0.9341 | 0.3456 | 0.7458 | 0.4932 |
| 2DME | 0.1705 | 0.8735 | 0.9774 | 0.2953 | 0.1065 | 0.0064 | 0.8817 | 0.2447 | 0.9999 | 0.5062 | |
| 2DO | 0.2294 | 0.3887 | 0.8650 | 0.9629 | 0.9869 | 0.5350 | 0.8243 | 0.7093 | 1.0000 | 0.7224 | |
| MSS | 0.1152 | 0.1918 | 0.1198 | 0.1551 | 0.0856 | 0.1168 | 0.9049 | 0.7077 | 1.0000 | 0.3774 | |
| IMFS | 0.1731 | 0.1817 | 0.1905 | 0.9930 | 0.9962 | 1.0000 | 0.5285 | 0.6018 | 0.3077 | 0.5525 | |
| IFCM | 0.2196 | 0.2784 | 0.4267 | 0.2558 | 0.0208 | 0.0525 | 0.8772 | 0.5963 | 0.4223 | 0.3500 | |
| CVM | 0.2607 | 0.2865 | 0.1570 | 0.3008 | 0.1106 | 0.2683 | 0.2836 | 0.1527 | 0.5982 | 0.2687 | |
| HCST | 0.1667 | 0.2809 | 0.1878 | 0.1103 | 0.3830 | 0.3252 | 0.1175 | 0.6994 | 0.0217 | 0.2547 | |
| Proposed | 0.1203 | 0.1523 | 0.0992 | 0.0874 | 0.0213 | 0.0040 | 0.0204 | 0.0092 | 0.1112 | 0.0695 | |
| MAR | THF/BHF | 0.5220 | 0.0000 | 0.4620 | 0.3540 | 0.4480 | 0.5440 | 0.8900 | 0.5070 | 0.0000 | 0.4141 |
| 2DME | 0.2160 | 0.7560 | 1.0000 | 0.0460 | 0.4120 | 0.4320 | 0.6850 | 0.5320 | 0.6412 | 0.5245 | |
| 2DO | 0.4480 | 0.4740 | 0.7260 | 0.6640 | 1.0000 | 0.5120 | 0.6033 | 0.7870 | 1.0000 | 0.6905 | |
| MSS | 0.2020 | 0.3200 | 0.2480 | 0.0780 | 0.3340 | 0.3980 | 0.8233 | 0.6630 | 1.0000 | 0.4518 | |
| IMFS | 0.0000 | 0.0000 | 0.0640 | 1.0000 | 1.0000 | 1.0000 | 0.0000 | 0.5000 | 0.0200 | 0.3982 | |
| IFCM | 0.0014 | 0.0000 | 0.1040 | 0.0400 | 0.1060 | 0.1560 | 0.3216 | 0.5000 | 0.0014 | 0.1367 | |
| CVM | 0.0000 | 0.3480 | 0.1920 | 0.1240 | 0.2620 | 0.2800 | 0.0000 | 0.4190 | 0.0796 | 0.1894 | |
| HCST | 0.0420 | 0.0220 | 0.0780 | 0.1020 | 0.1460 | 0.1880 | 0.0000 | 0.5020 | 0.0000 | 0.1200 | |
| Proposed | 0.0000 | 0.0000 | 0.0760 | 0.0280 | 0.0720 | 0.0840 | 0.0000 | 0.0150 | 0.0010 | 0.0307 | |
| FAR | THF/BHF | 0.9688 | 0.8485 | 0.9661 | 0.9160 | 0.9574 | 0.9728 | 0.8925 | 0.9490 | 0.7959 | 0.9186 |
| 2DME | 0.8734 | 0.8913 | 1.0000 | 0.8077 | 0.8987 | 0.9123 | 0.8758 | 0.7895 | 0.7756 | 0.8694 | |
| 2DO | 0.8667 | 0.7500 | 0.9627 | 0.7143 | 1.0000 | 0.9225 | 0.6667 | 0.7917 | 1.0000 | 0.8527 | |
| MSS | 0.5455 | 0.6667 | 0.8285 | 0.7187 | 0.6875 | 0.8701 | 0.6364 | 0.8091 | 1.0000 | 0.7514 | |
| IMFS | 0.3750 | 0.1255 | 0.8433 | 1.0000 | 1.0000 | 1.0000 | 0.2568 | 0.1395 | 0.3406 | 0.5645 | |
| IFCM | 0.8990 | 0.3108 | 0.9190 | 0.5326 | 0.8724 | 0.9563 | 0.3529 | 0.4924 | 0.6058 | 0.6601 | |
| CVM | 0.0556 | 0.4167 | 0.9074 | 0.4647 | 0.8362 | 0.8964 | 0.3726 | 0.1512 | 0.6551 | 0.5284 | |
| HCST | 0.8592 | 0.4527 | 0.8571 | 0.2581 | 0.7742 | 0.9314 | 0.2863 | 0.1427 | 0.5739 | 0.5706 | |
| Proposed | 0.0579 | 0.0338 | 0.2007 | 0.0000 | 0.1853 | 0.6717 | 0.1959 | 0.0285 | 0.1638 | 0.1708 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, Z.; Zhu, Y.; Li, B.; Xiong, W.; Huang, Y. Thermal Infrared Small Ship Detection in Sea Clutter Based on Morphological Reconstruction and Multi-Feature Analysis. Appl. Sci. 2019, 9, 3786. https://doi.org/10.3390/app9183786
Li Y, Li Z, Zhu Y, Li B, Xiong W, Huang Y. Thermal Infrared Small Ship Detection in Sea Clutter Based on Morphological Reconstruction and Multi-Feature Analysis. Applied Sciences. 2019; 9(18):3786. https://doi.org/10.3390/app9183786
Chicago/Turabian StyleLi, Yongsong, Zhengzhou Li, Yong Zhu, Bo Li, Weiqi Xiong, and Yangfan Huang. 2019. "Thermal Infrared Small Ship Detection in Sea Clutter Based on Morphological Reconstruction and Multi-Feature Analysis" Applied Sciences 9, no. 18: 3786. https://doi.org/10.3390/app9183786
APA StyleLi, Y., Li, Z., Zhu, Y., Li, B., Xiong, W., & Huang, Y. (2019). Thermal Infrared Small Ship Detection in Sea Clutter Based on Morphological Reconstruction and Multi-Feature Analysis. Applied Sciences, 9(18), 3786. https://doi.org/10.3390/app9183786