Failure-Robot Path Complementation for Robot Swarm Mission Planning

Abstract
:1. Introduction
1.1. Background and Objectives
1.2. Related Works
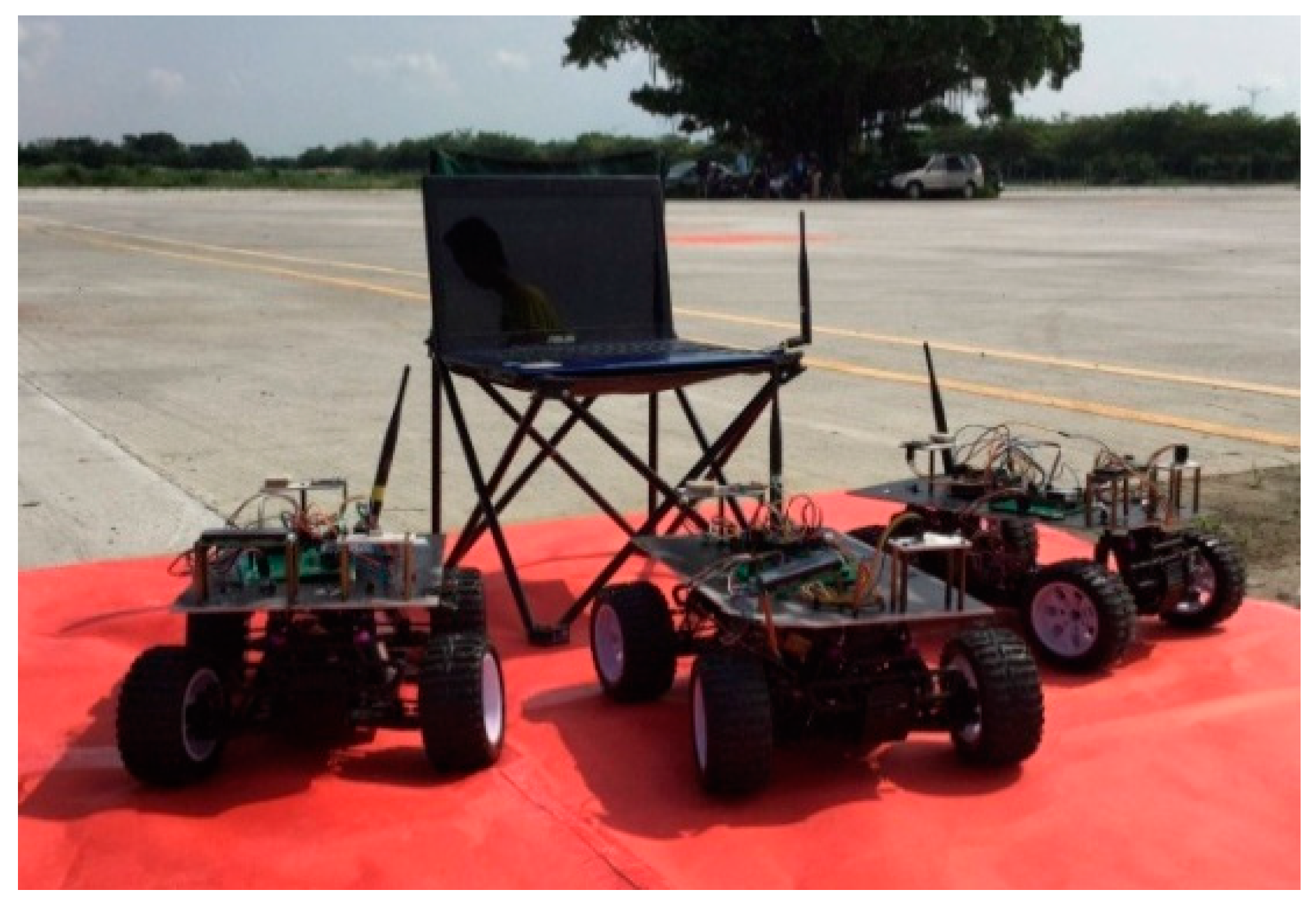
2. Experimental Vehicle and System Architecture
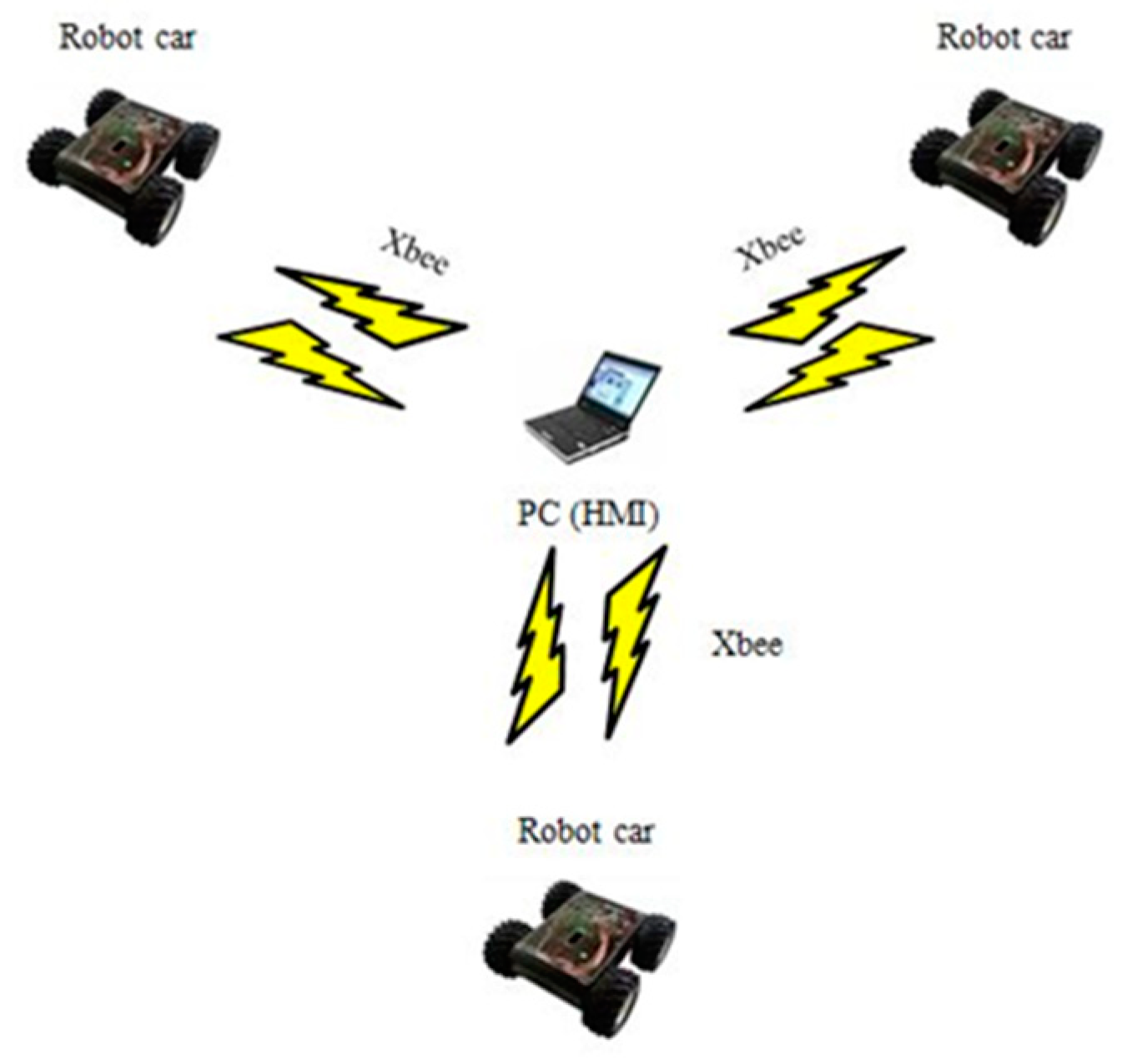
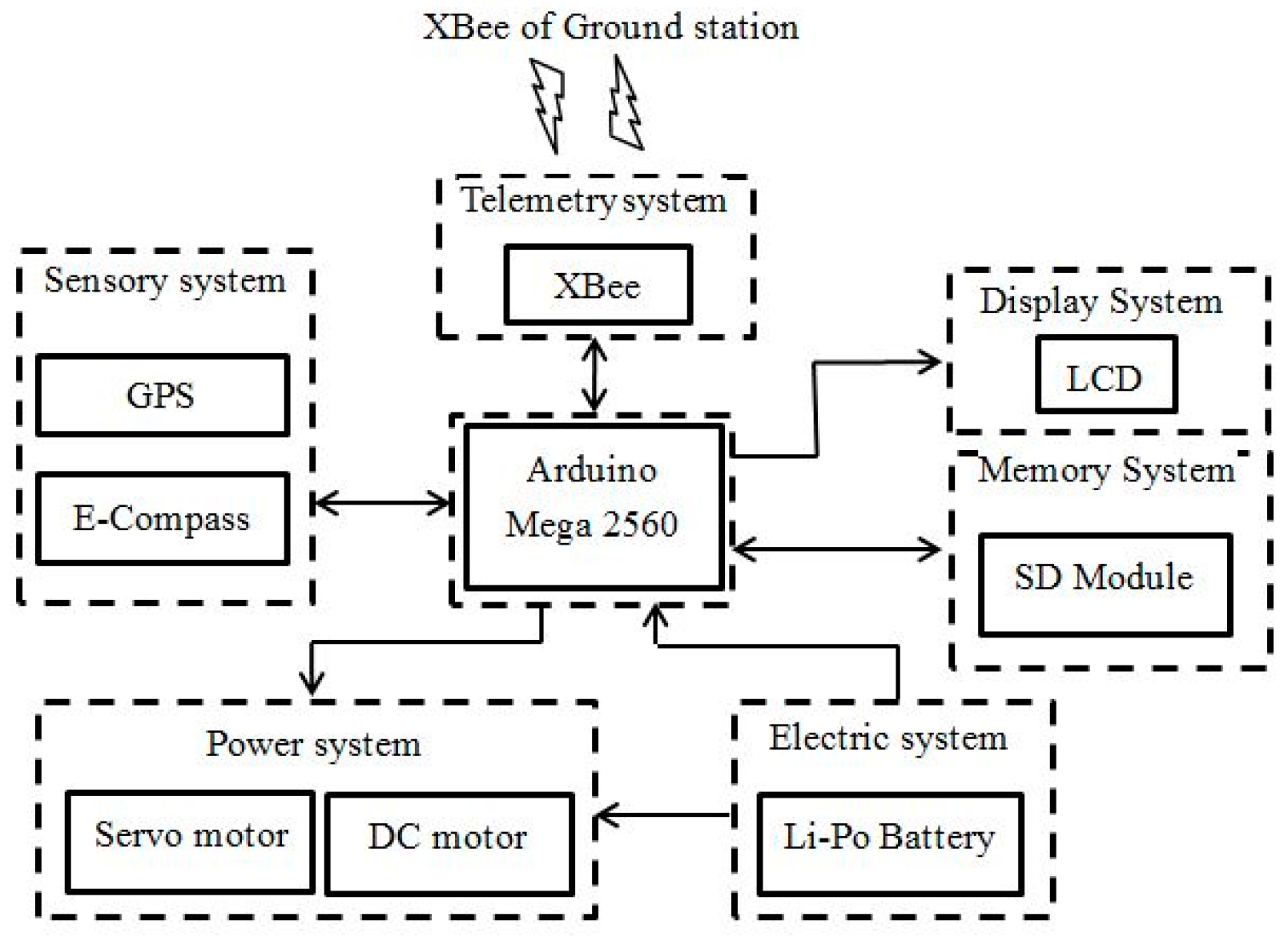
2.1. System Architecture
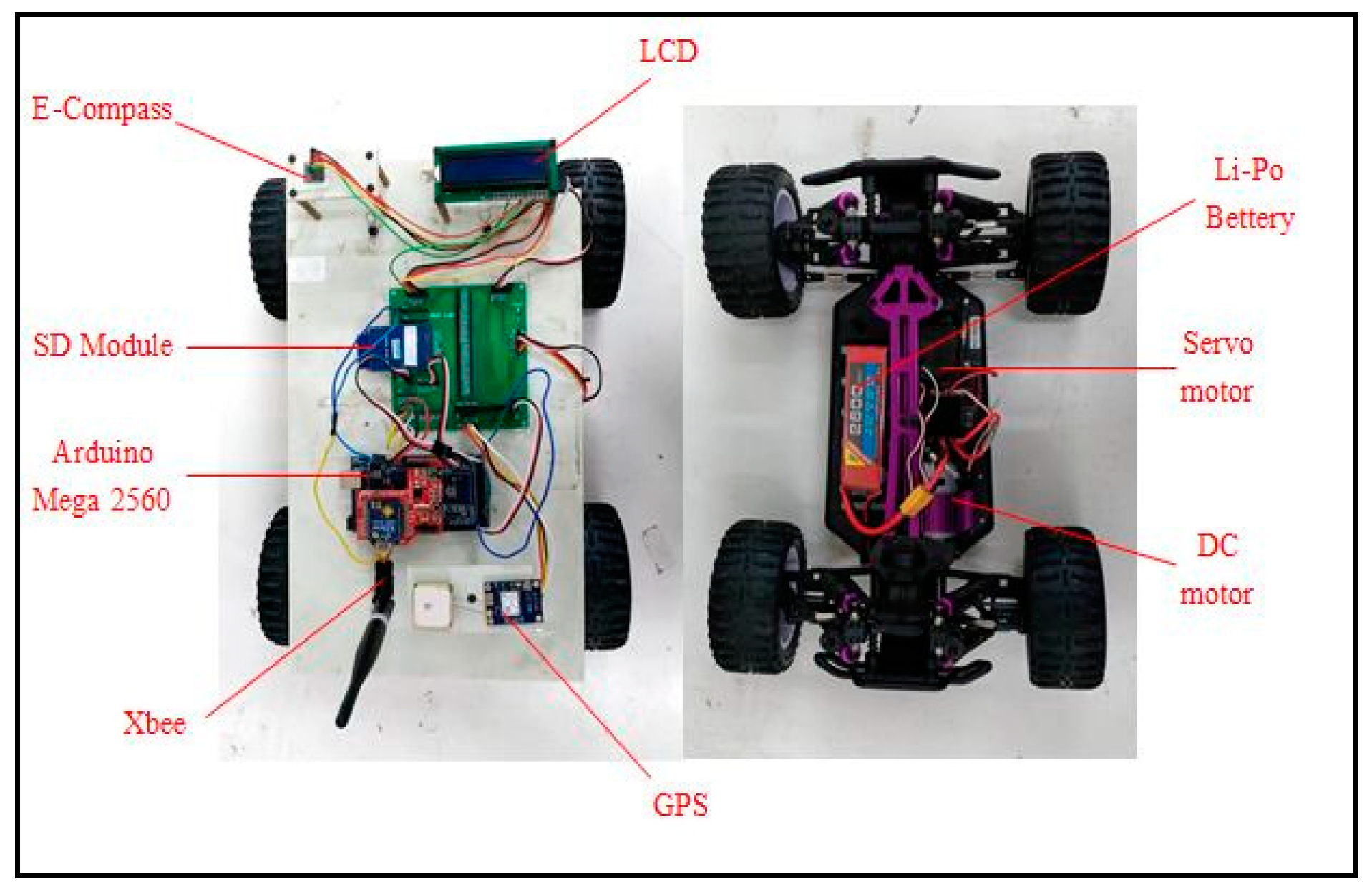
2.2. Experimental Vehicle
3. Design and Principle of Path Programming
3.1. A* Search Algorithm
3.2. Tabu Search (TS)
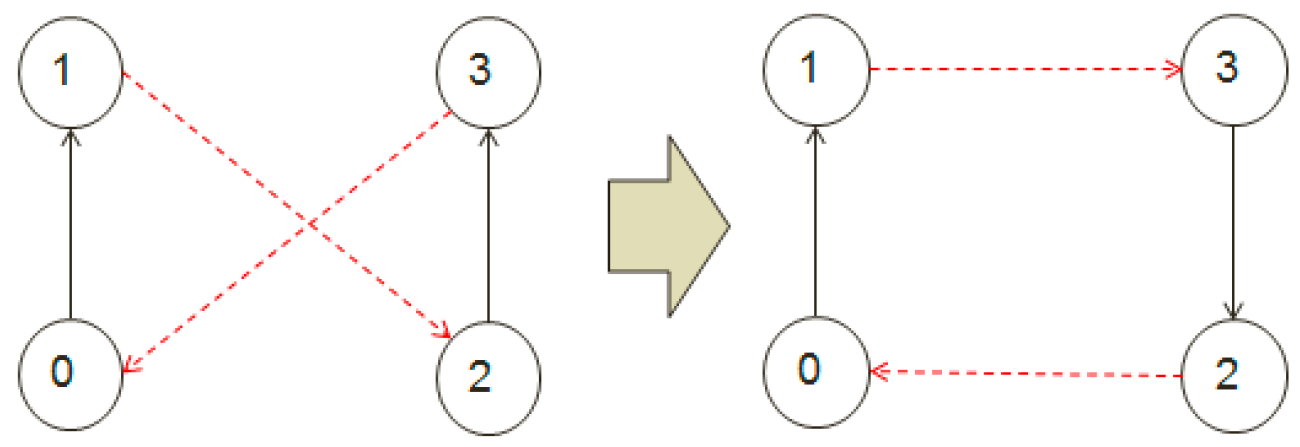
3.2.1. TS to Program the Single Path (In-Route)
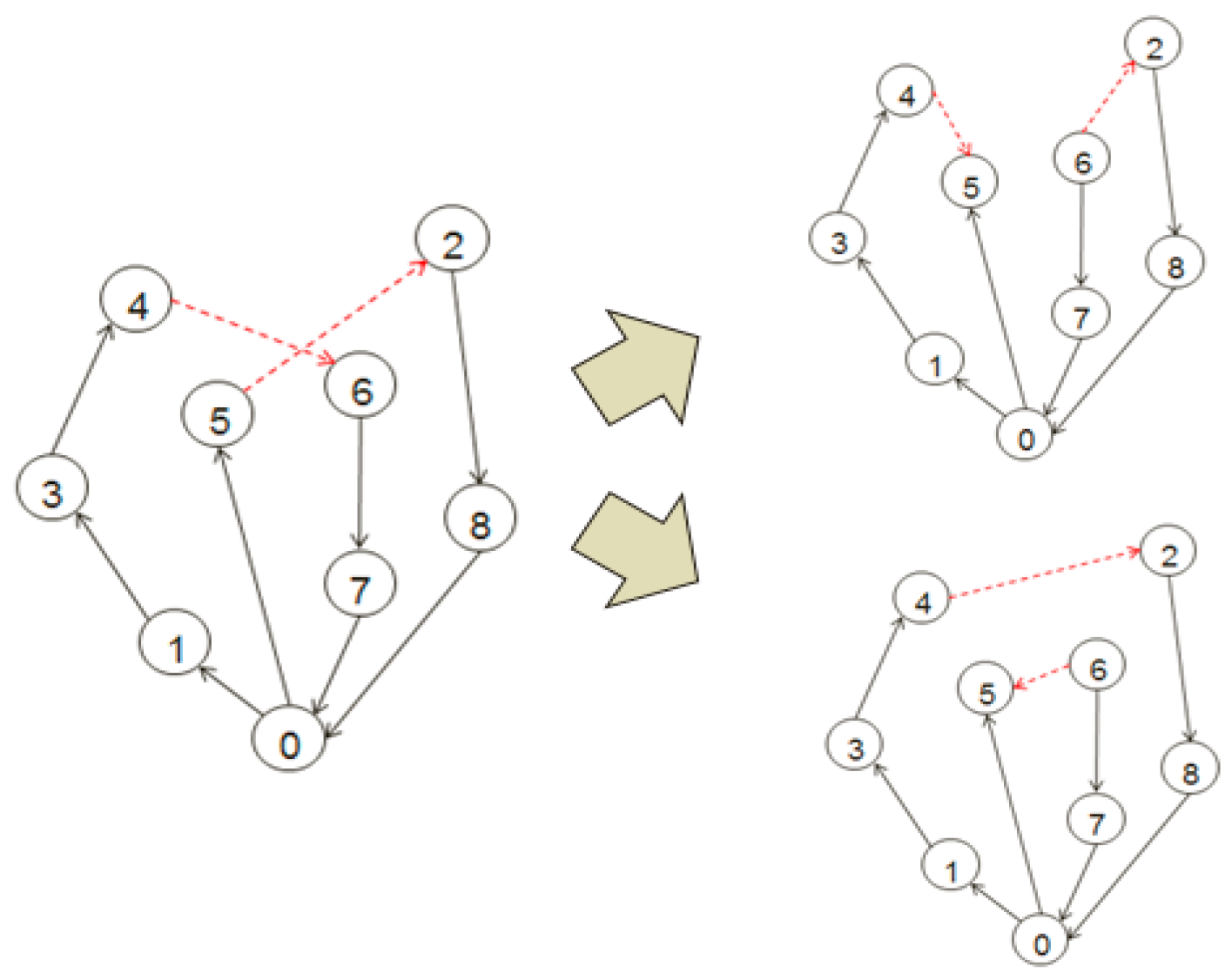
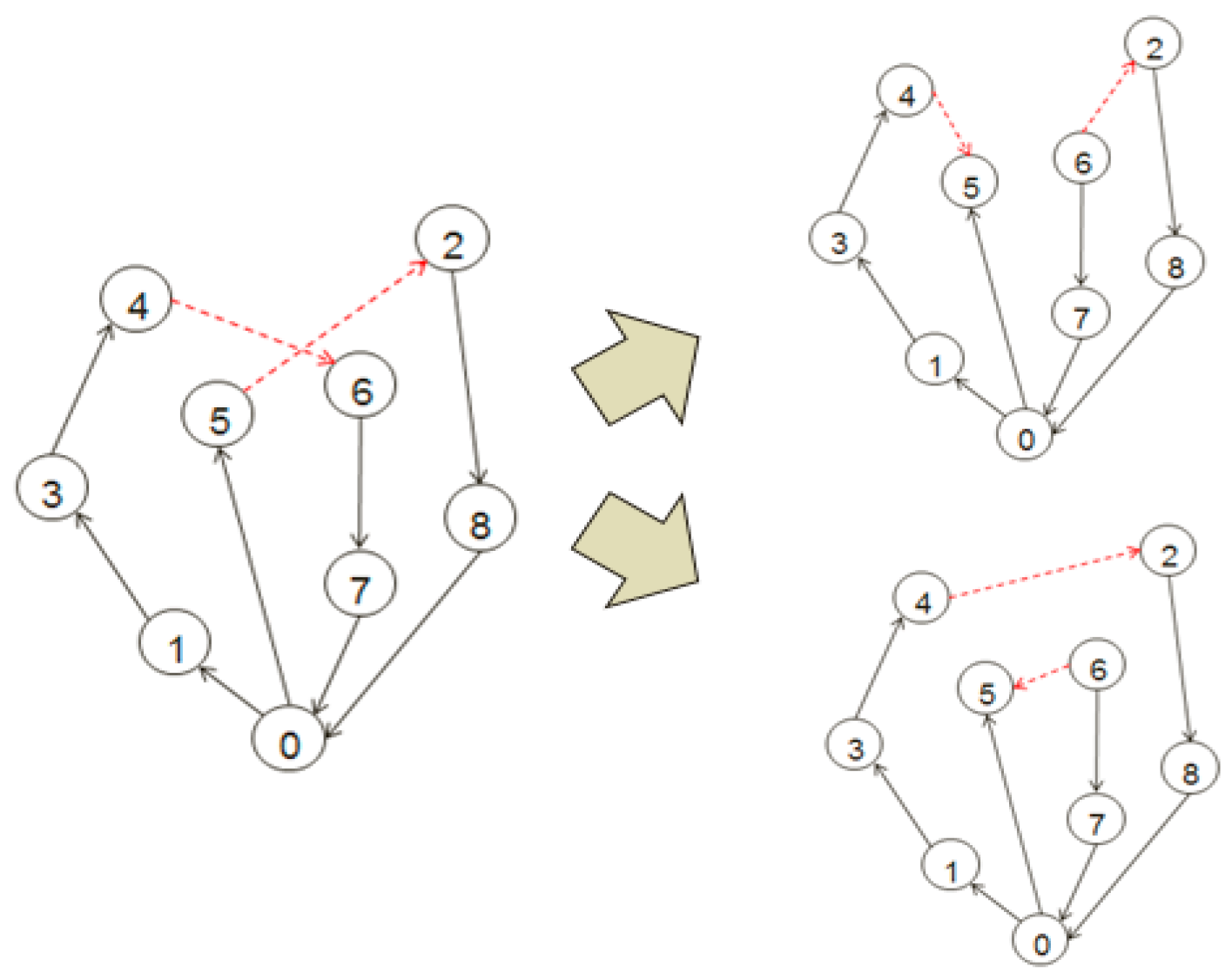
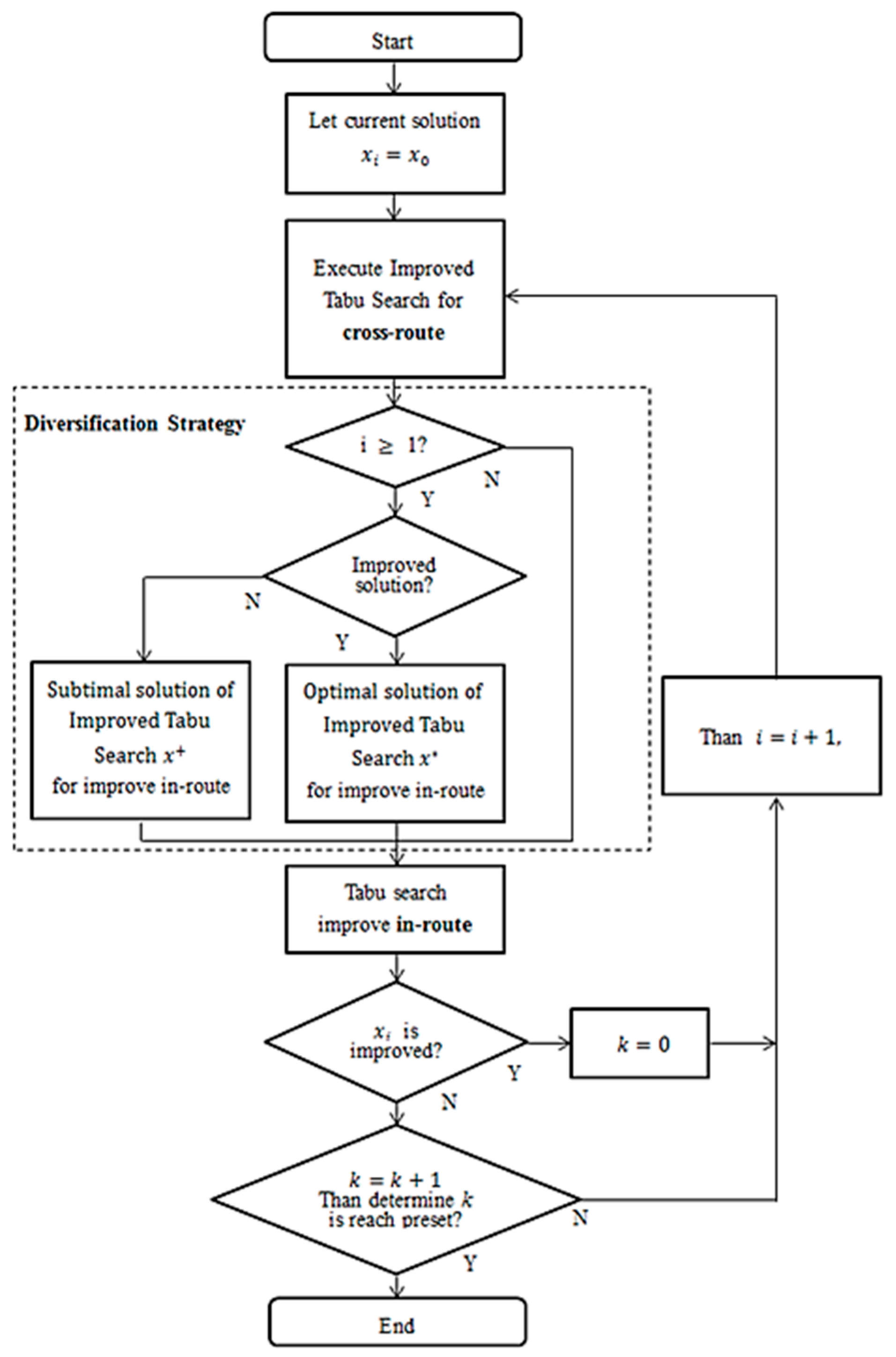
3.2.2. Improving TS to Improve the Cross-Route Path
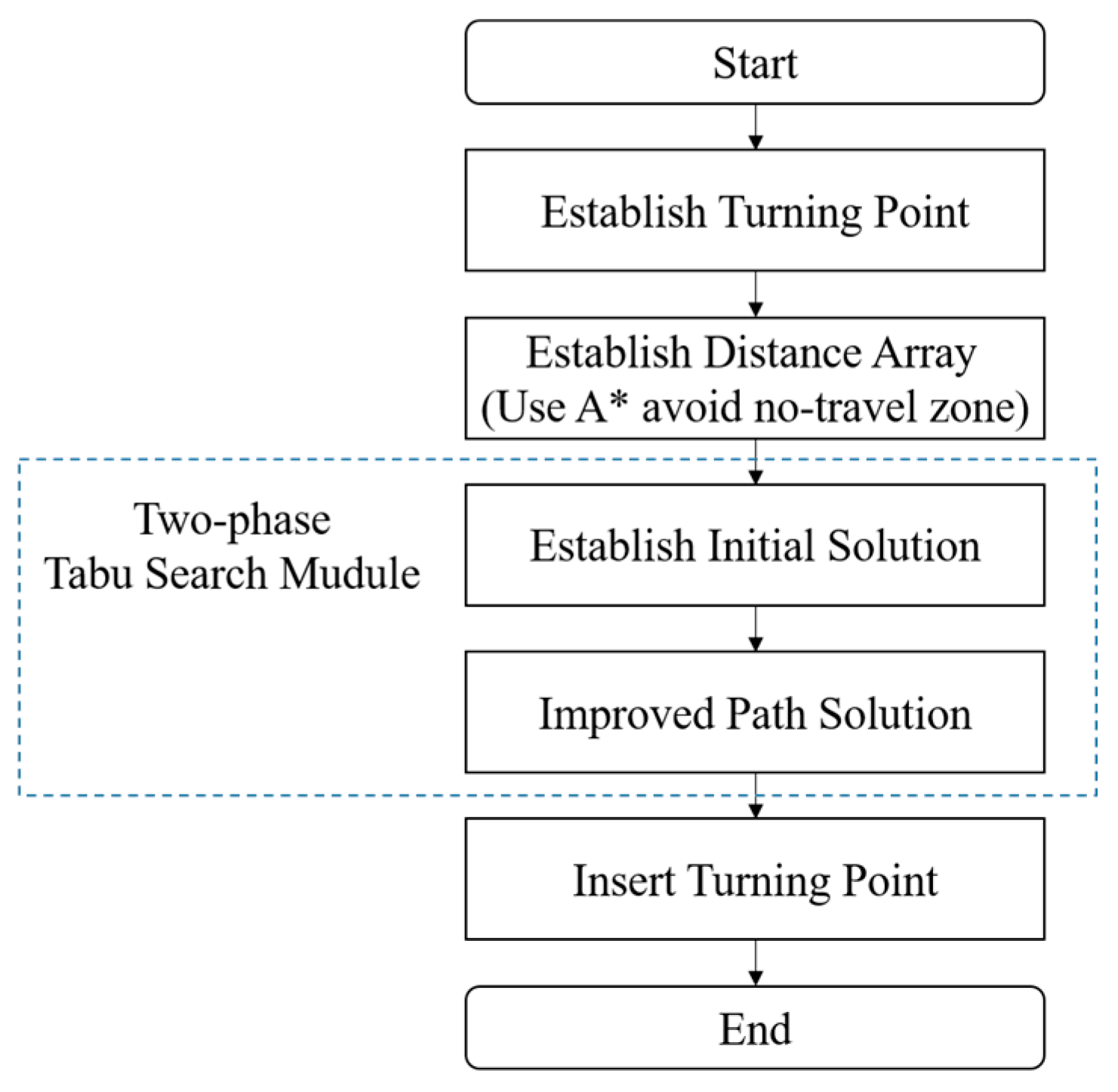
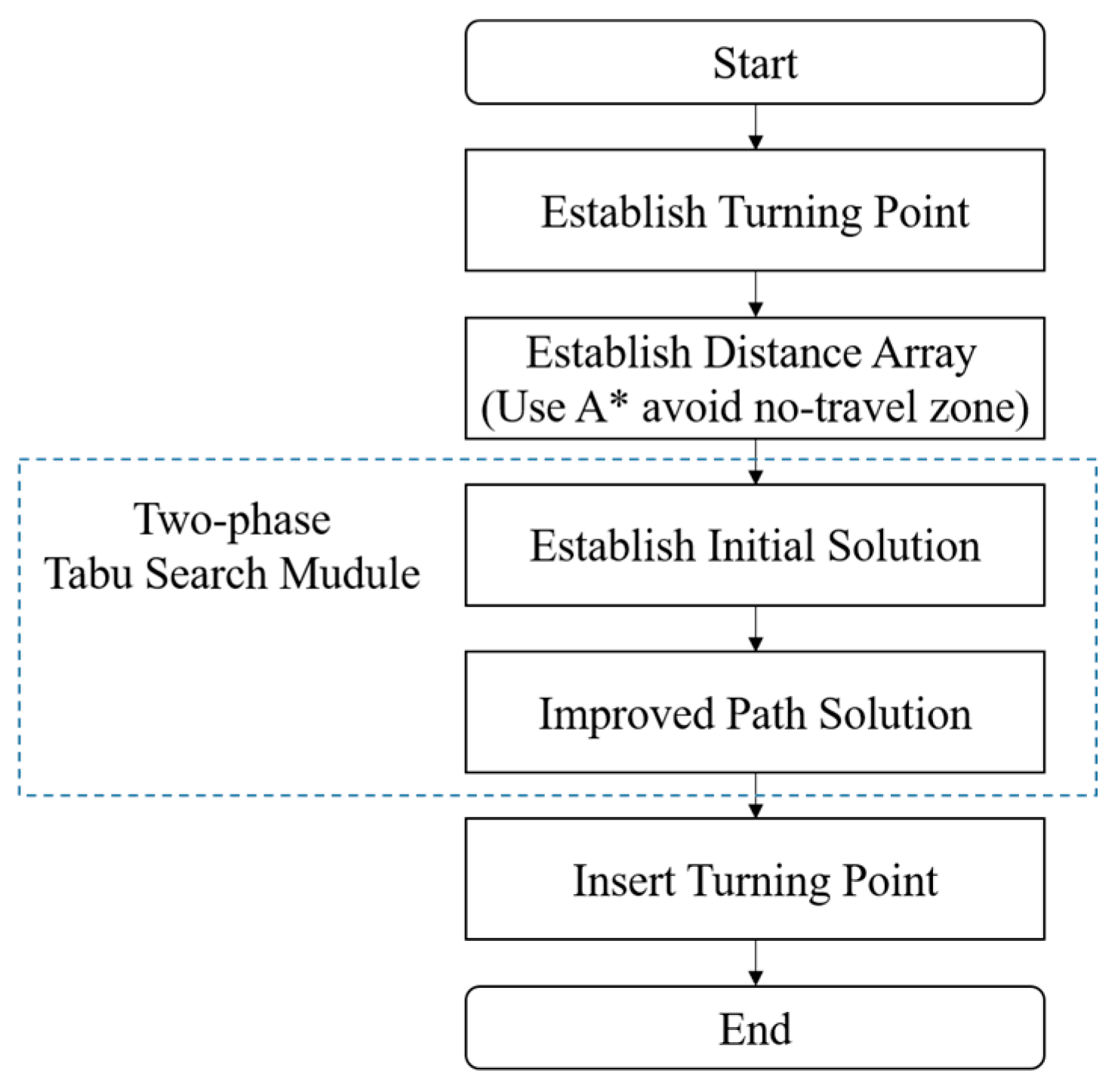
3.3. Workflow of Multi-Vehicle Path Programming
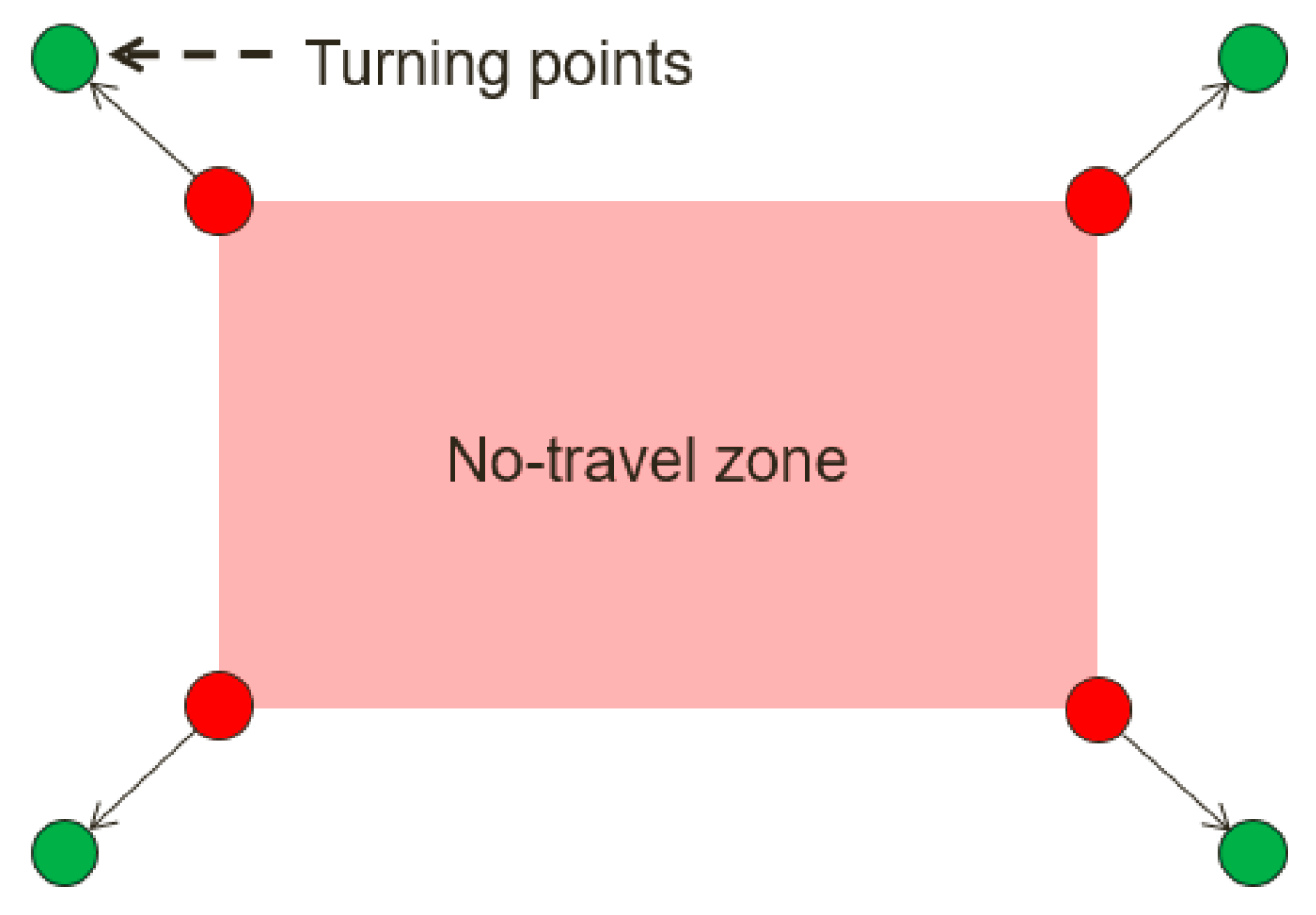
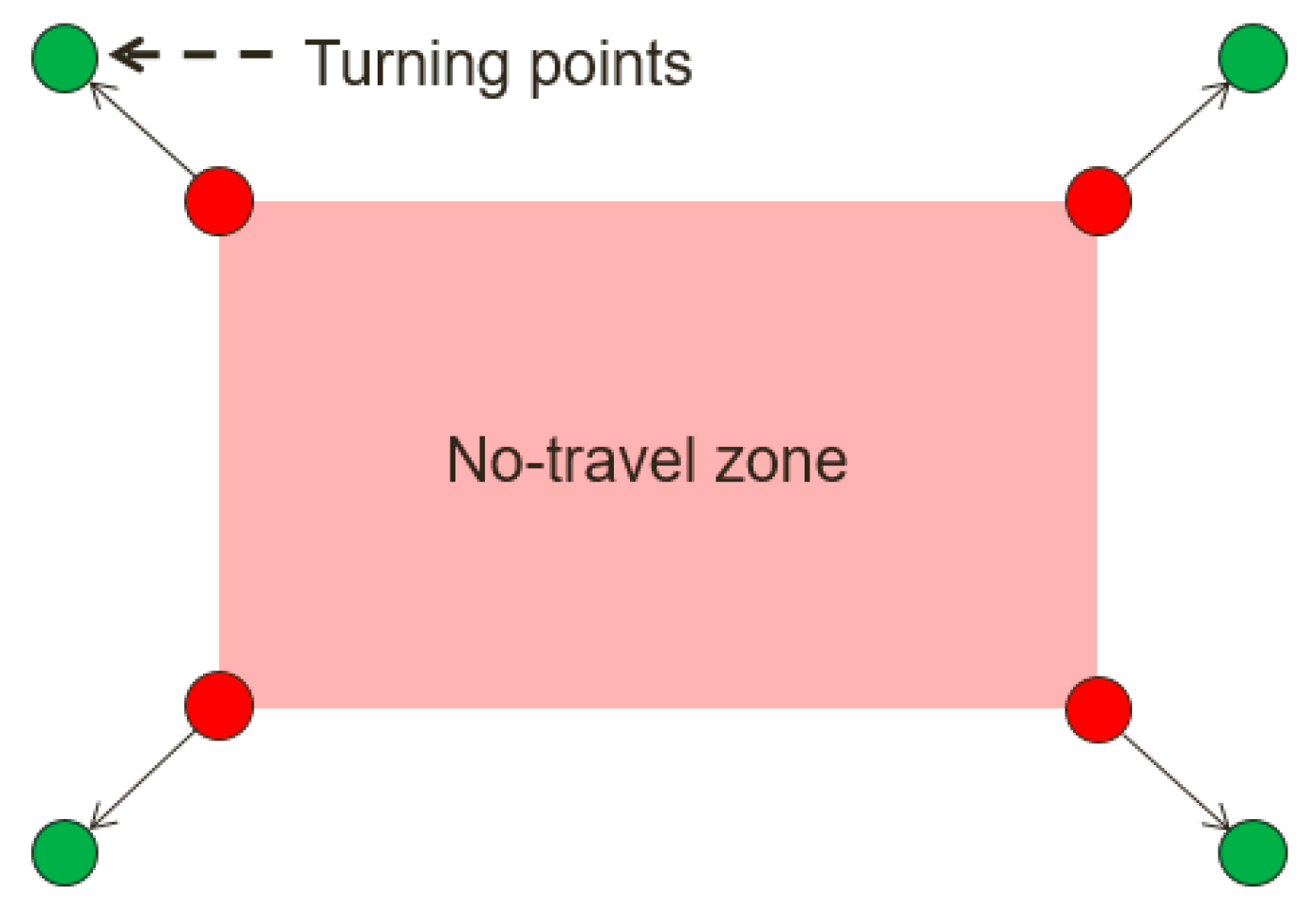
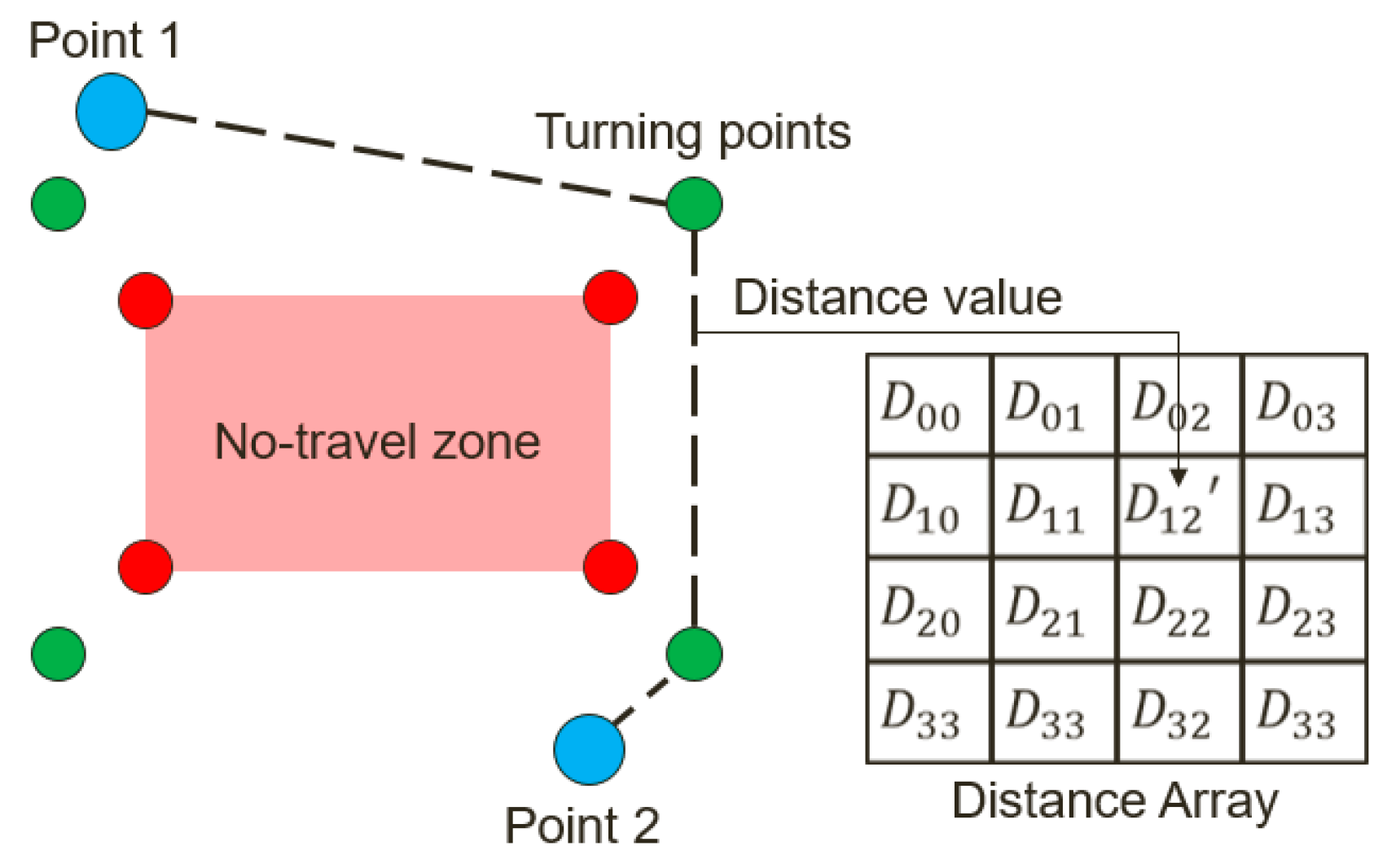
3.3.1. Establishing the Turning Points
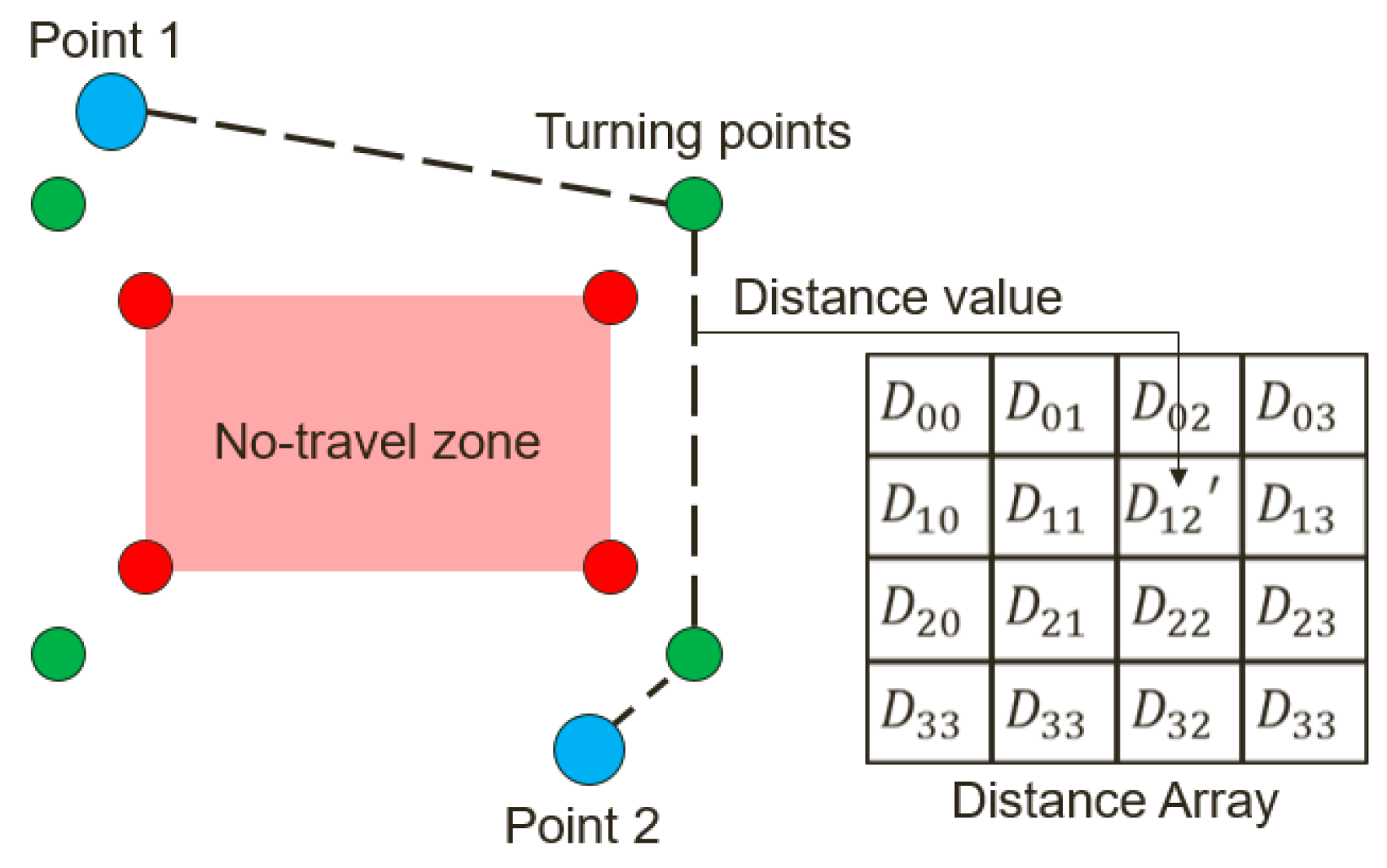
3.3.2. Establishing the Distance Array (Using A* to Avoid the No-Travel Zone)
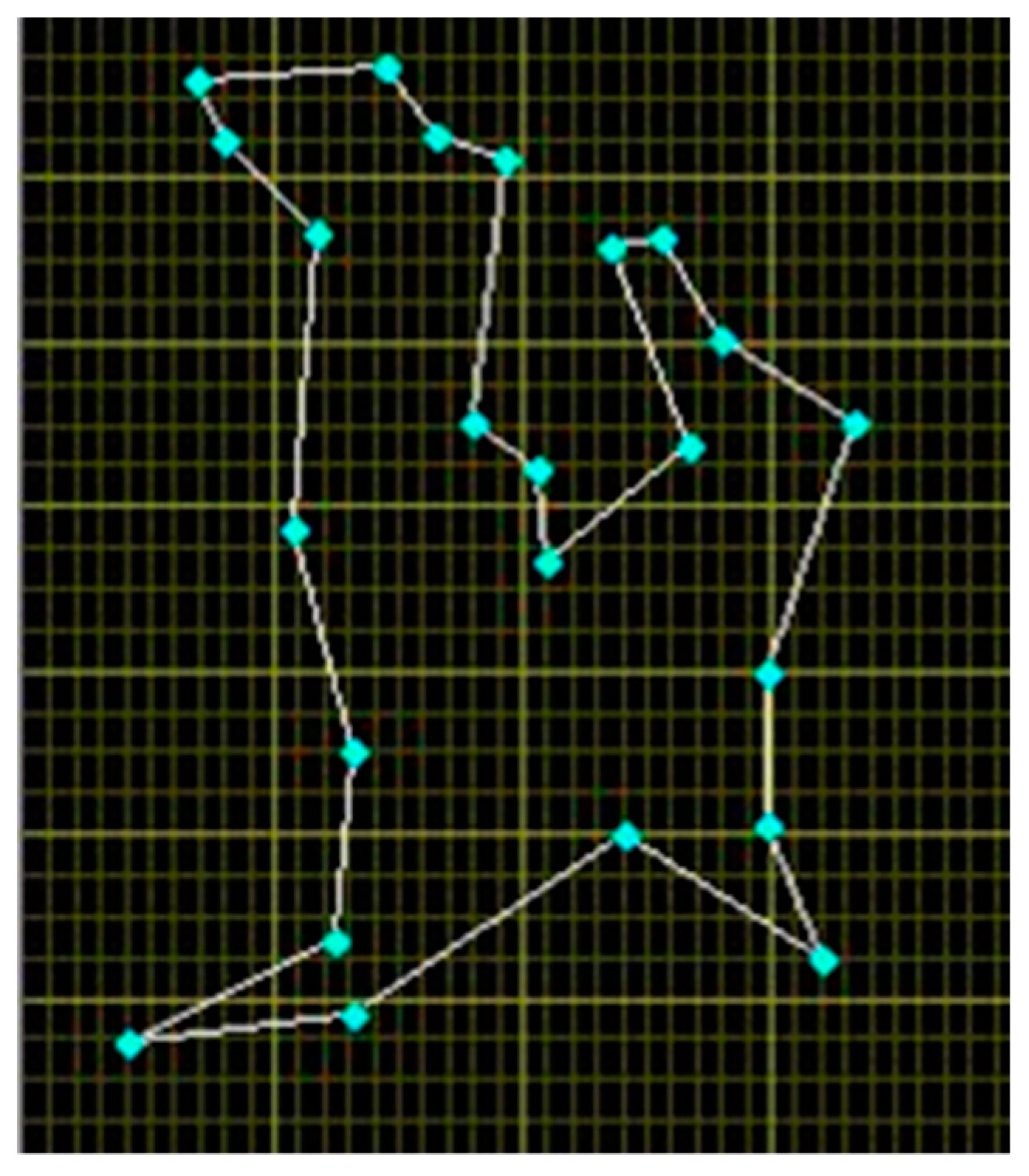
3.3.3. Establishing the Initial Solution
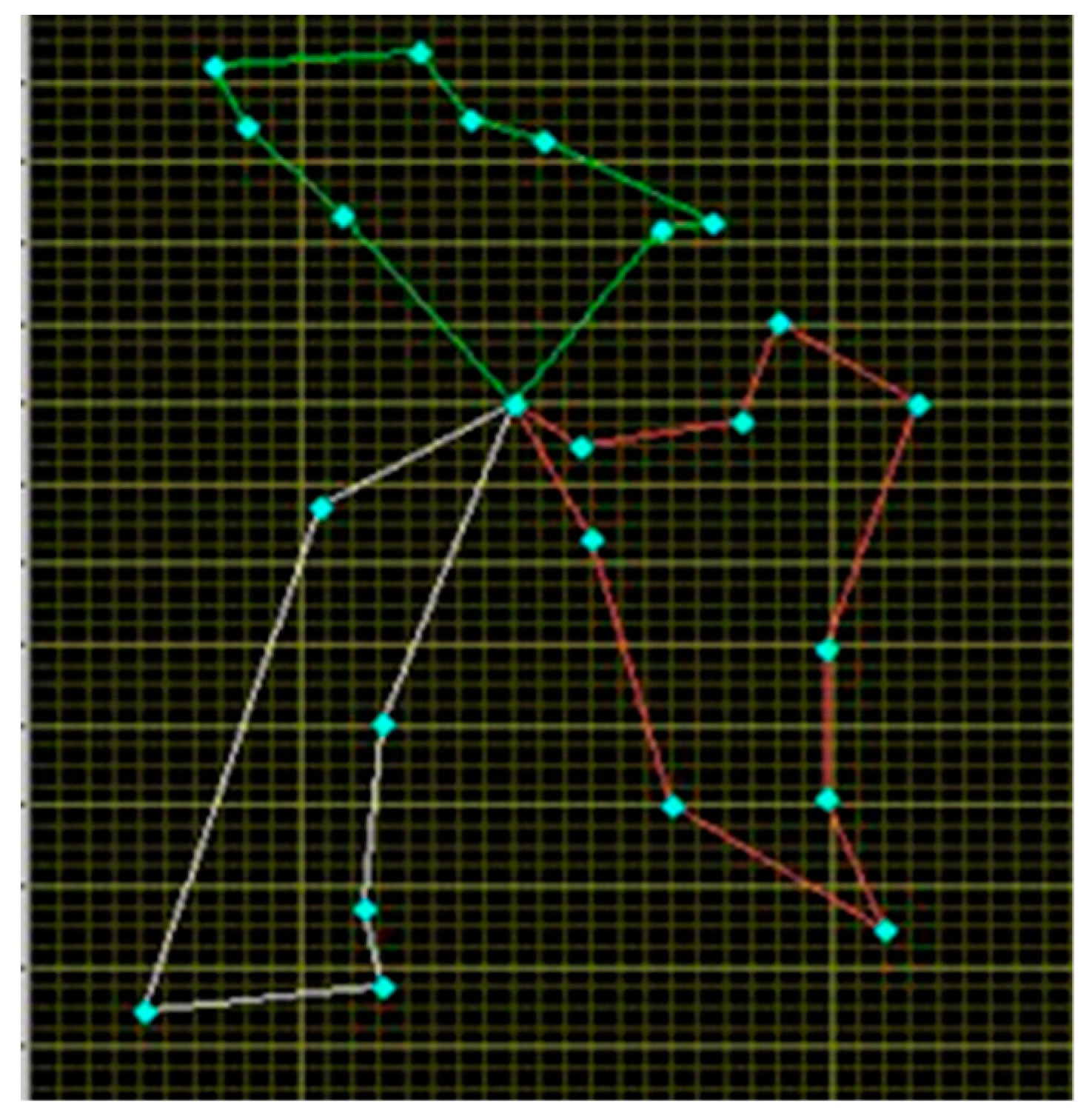
3.3.4. Improved Path Solution
3.3.5. Inserting the Turning Point
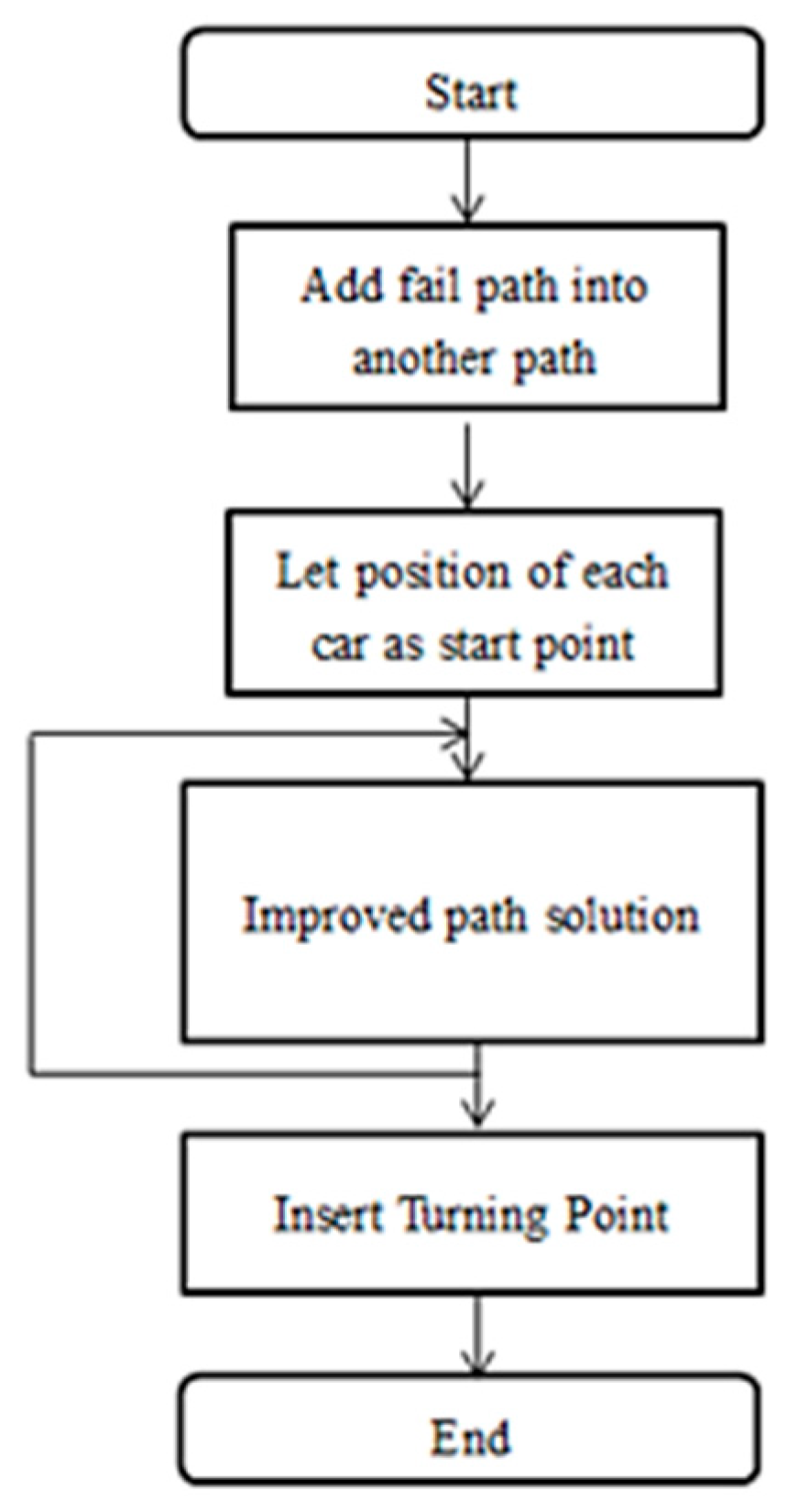
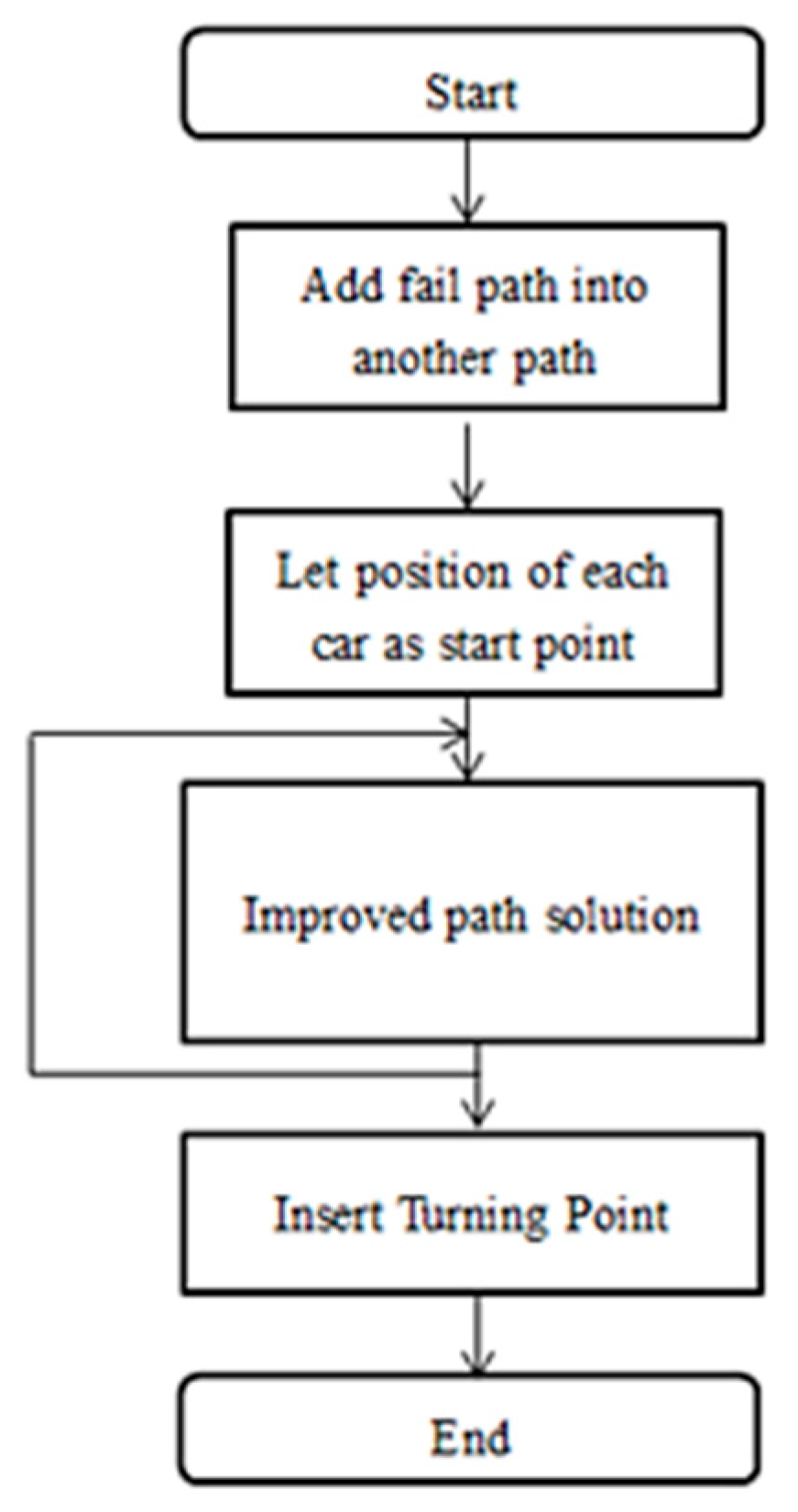
4. Complementation for the Failed Path
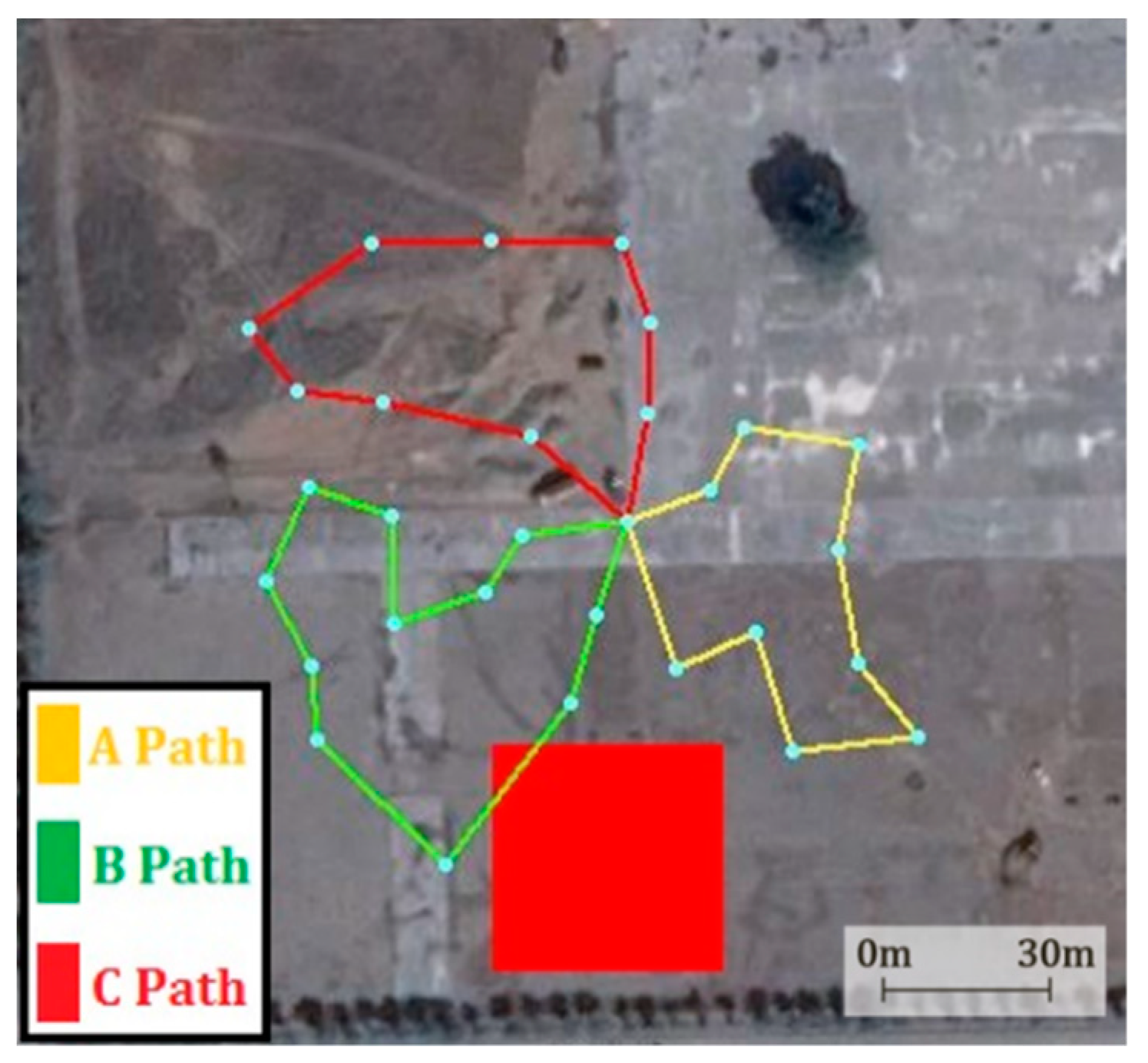
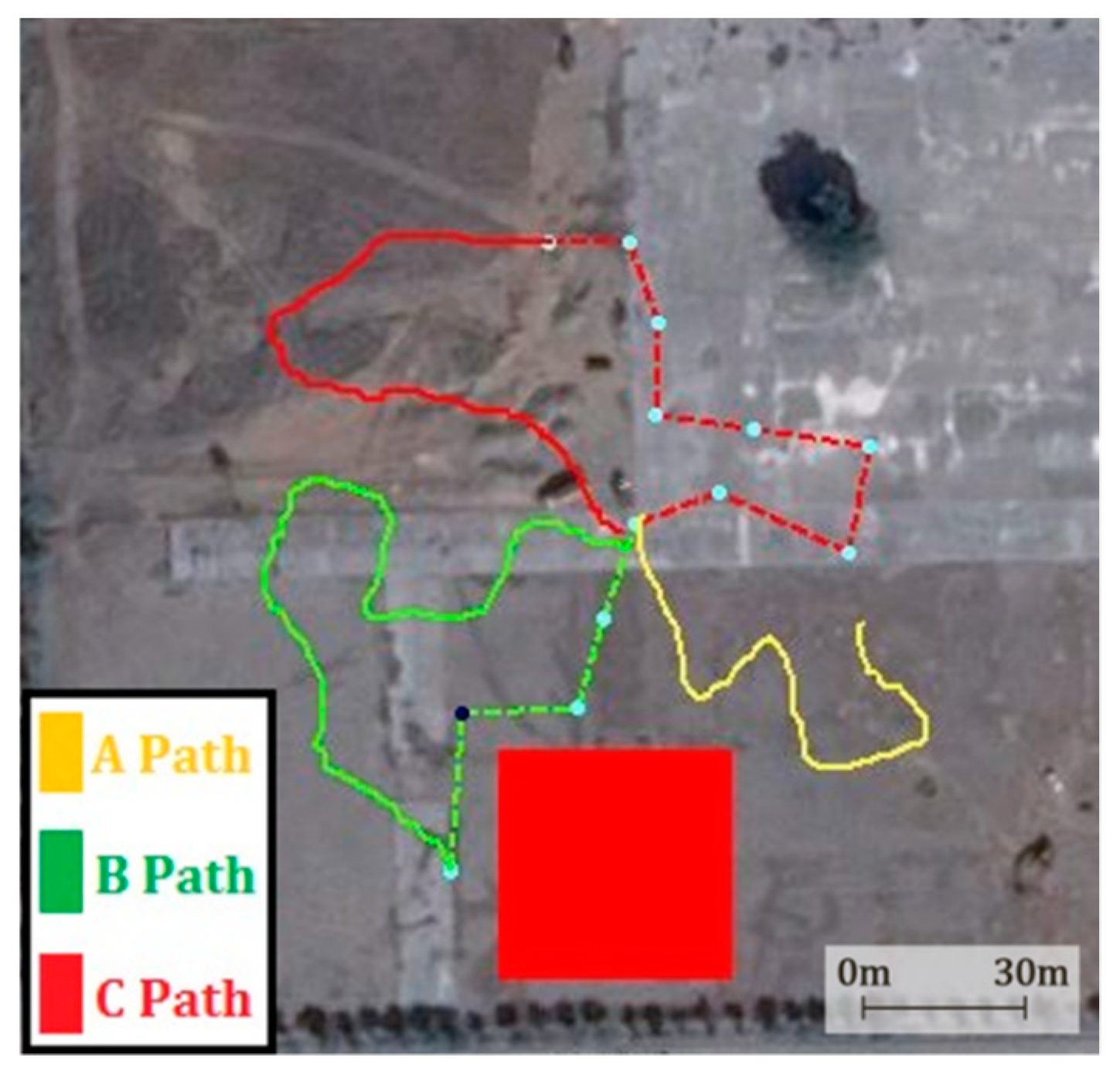
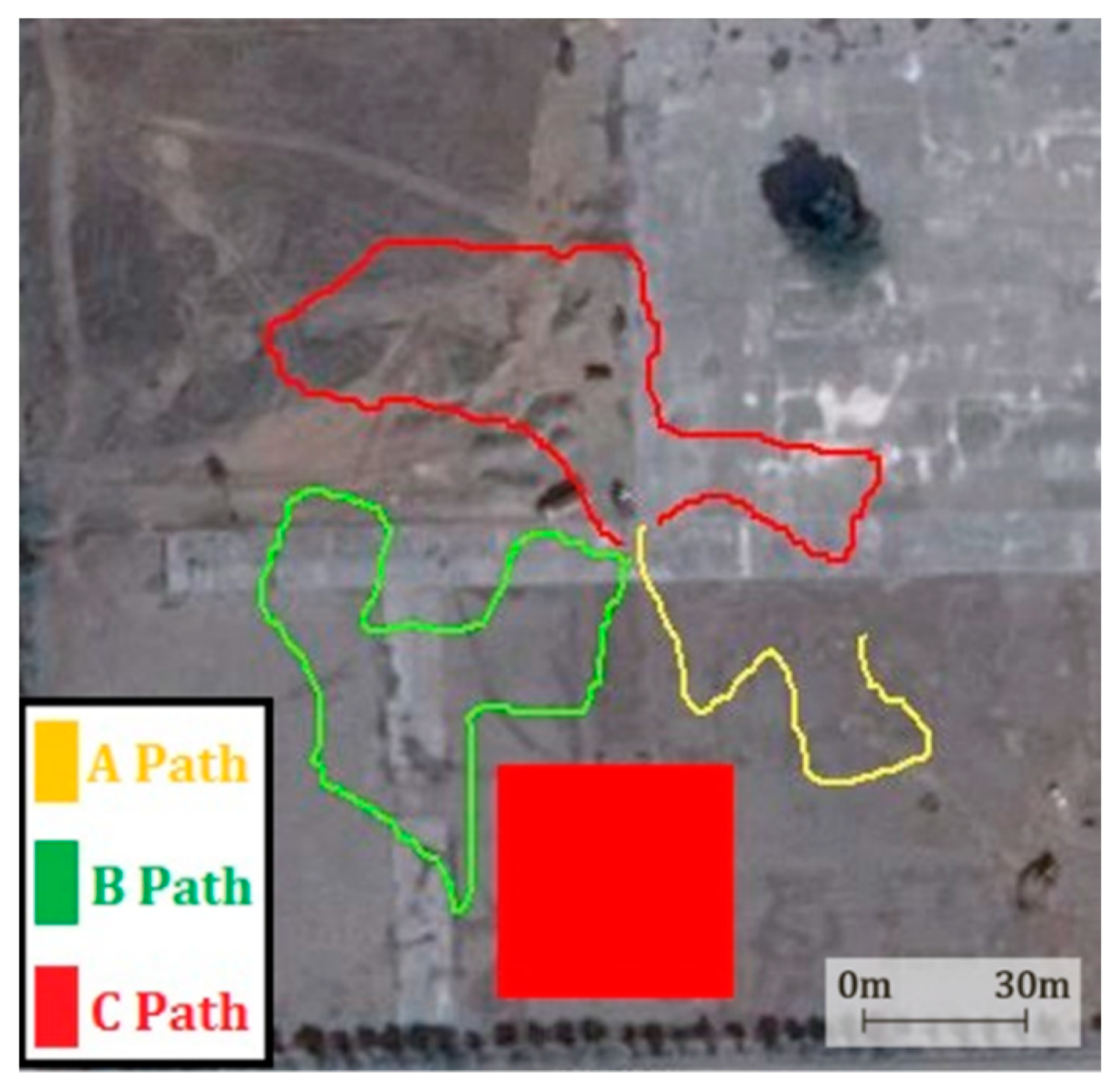
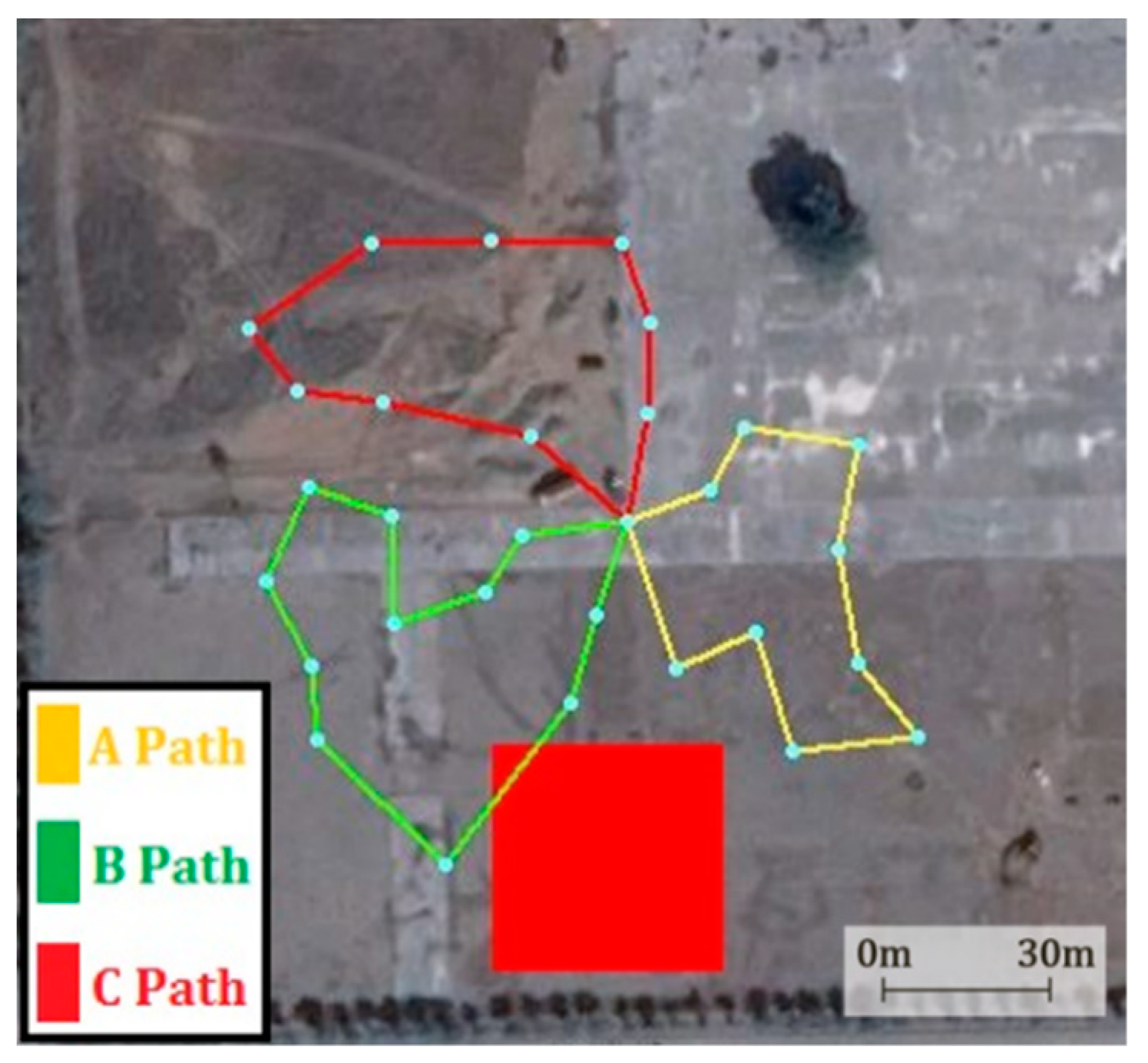
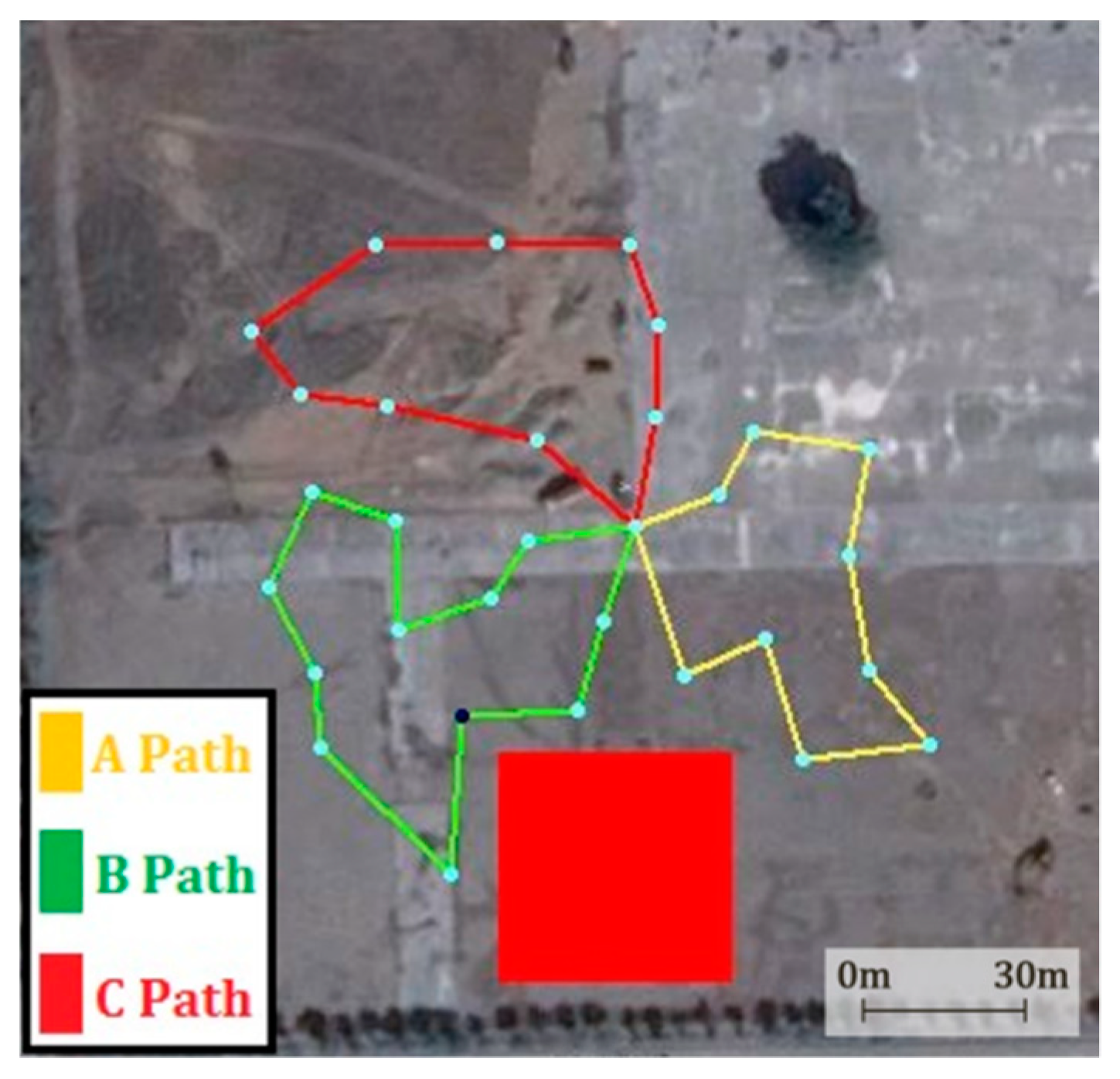
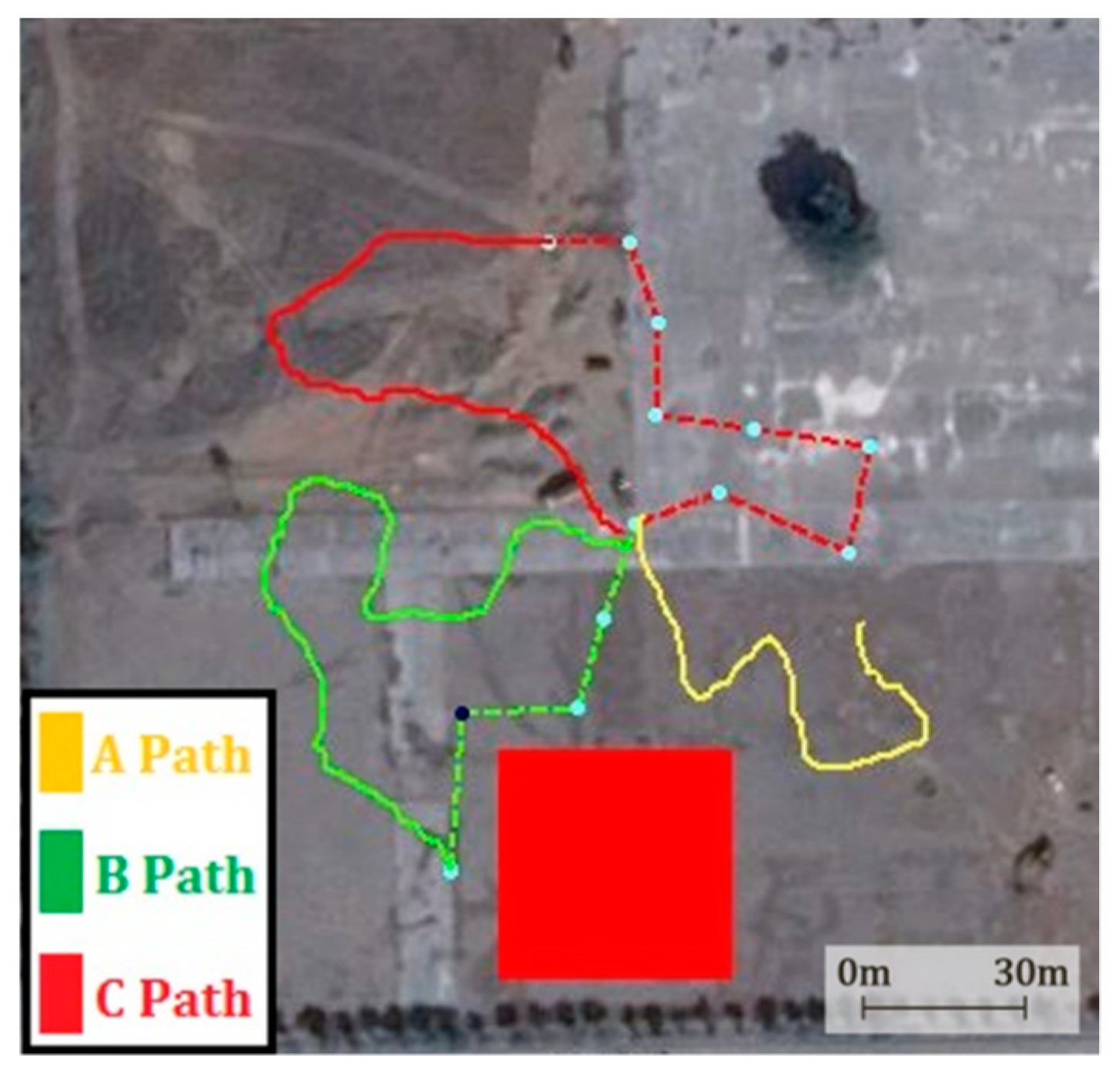
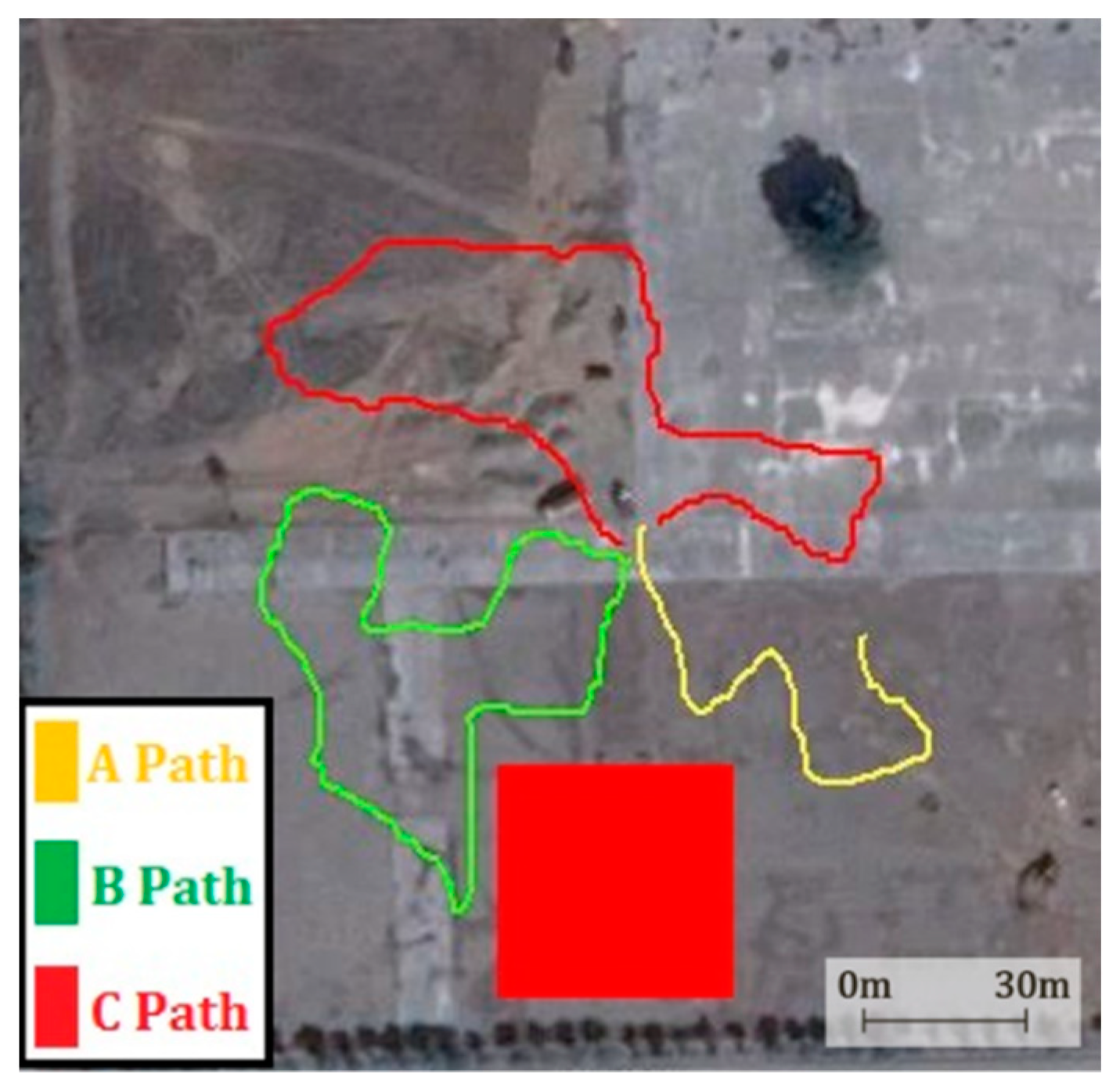
5. Path Programming and Experiment Results
5.1. Test of Computer Path Programming
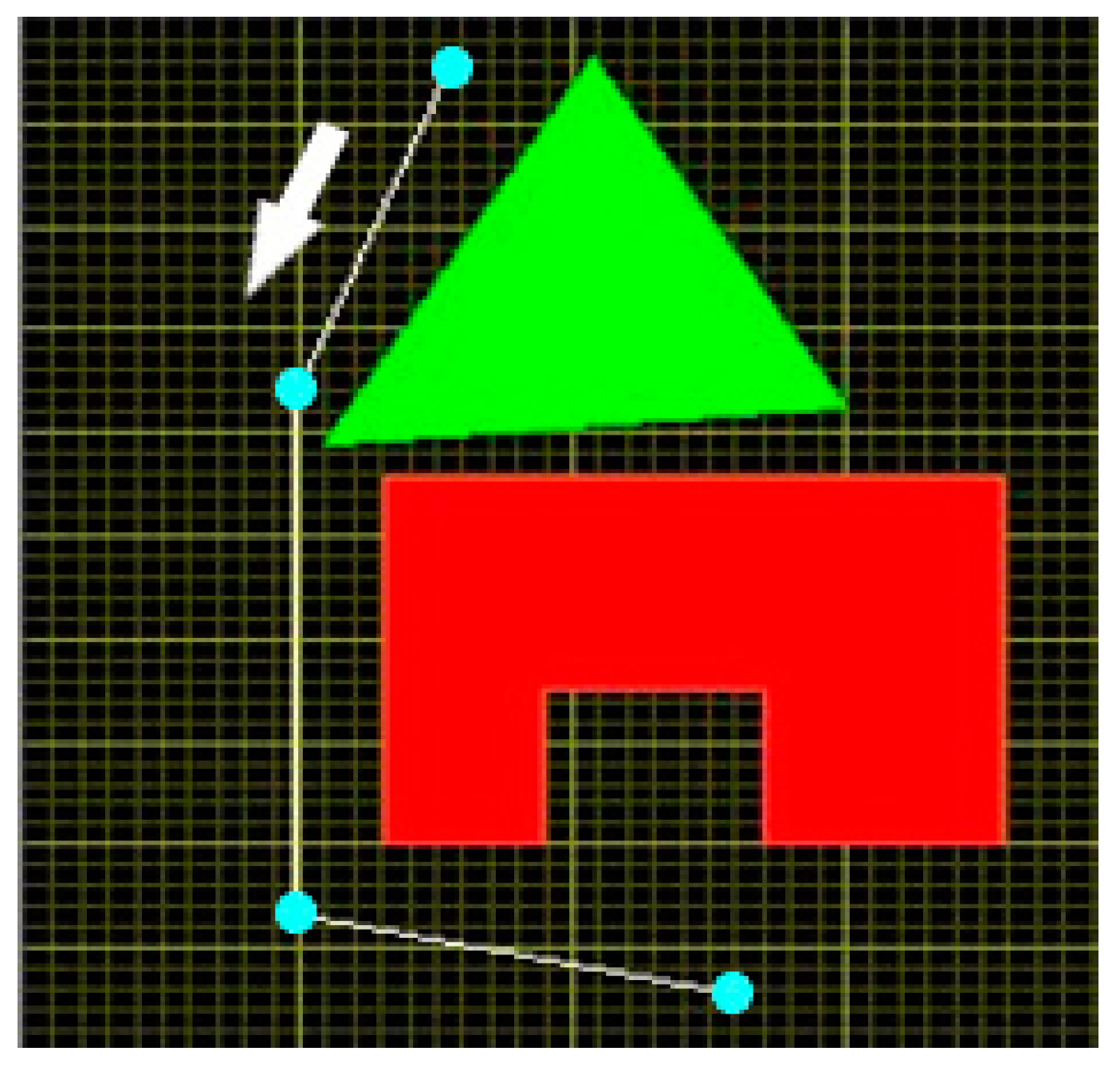
5.1.1. Test of the Path Bypassing the No-travel Zone
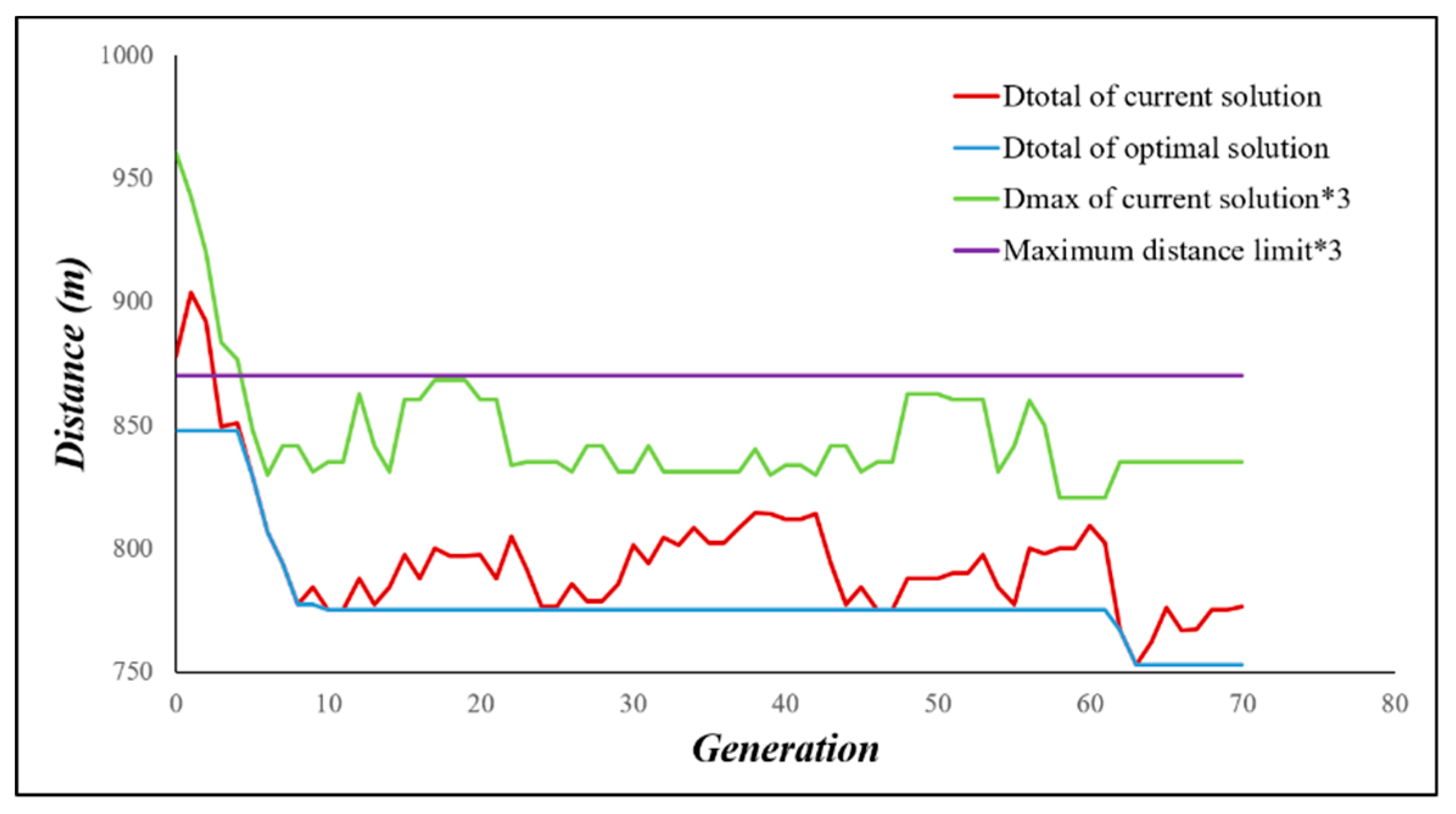
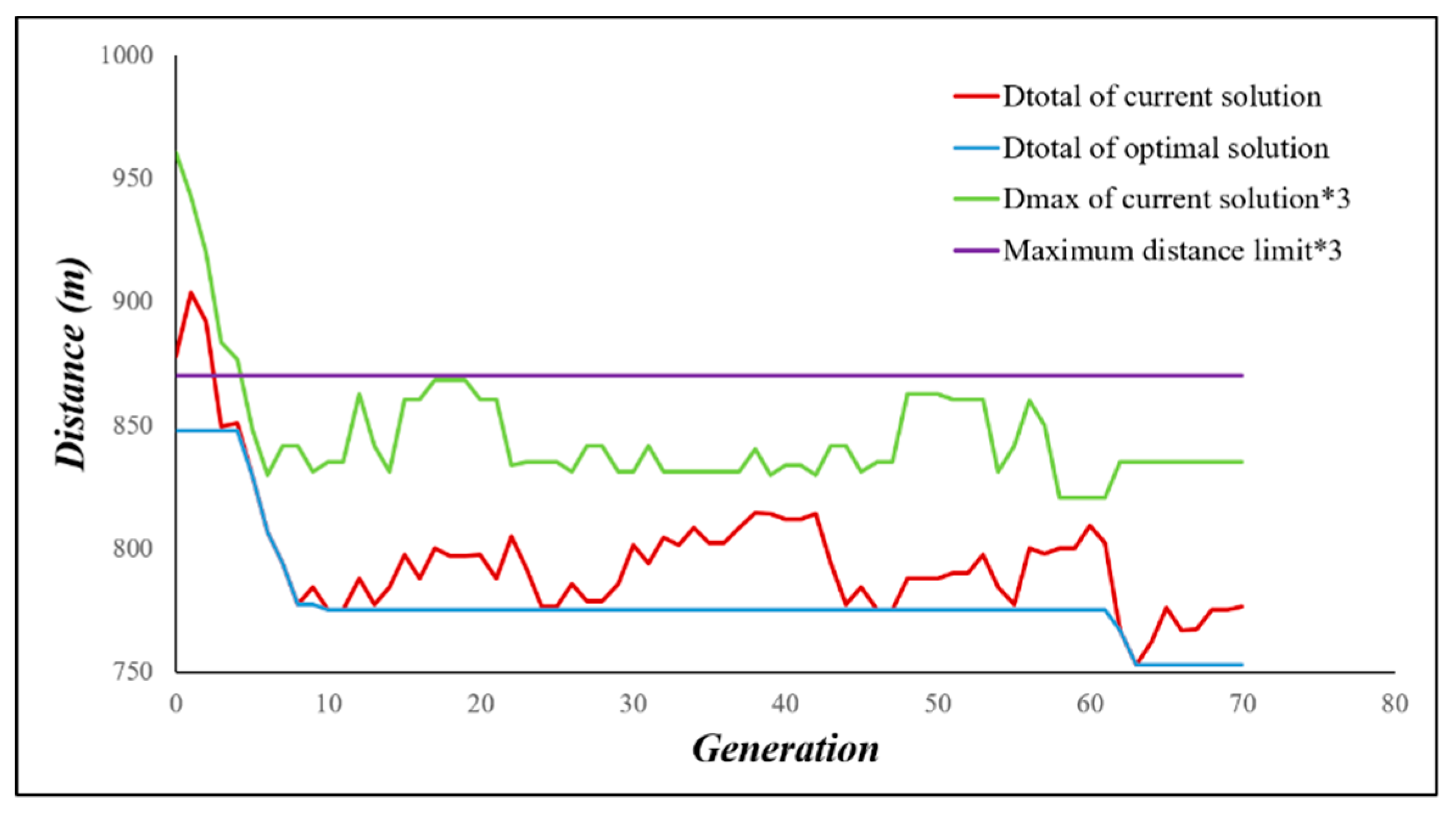
5.1.2. Test of Path Scheduling and Algorithm Convergence
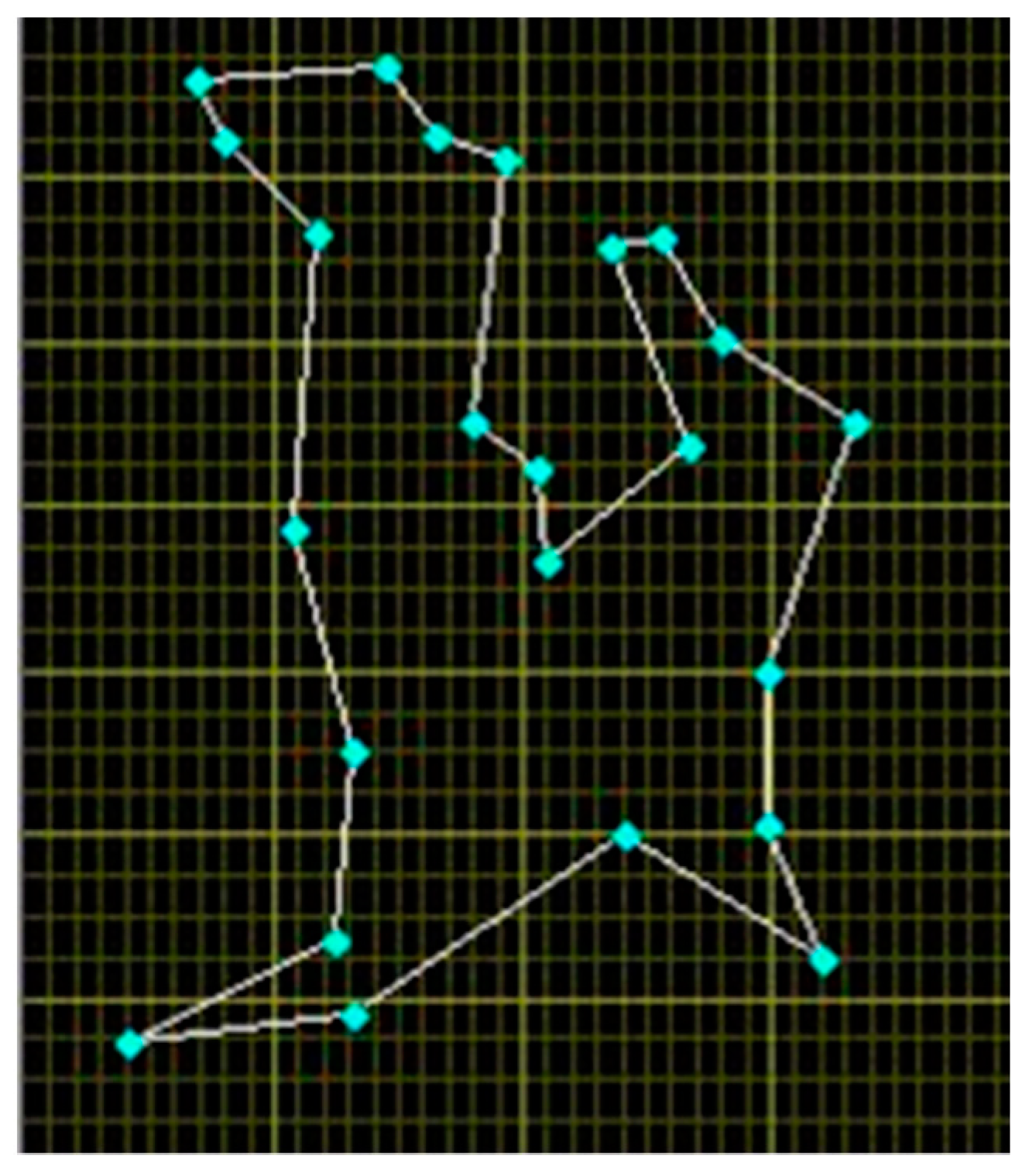
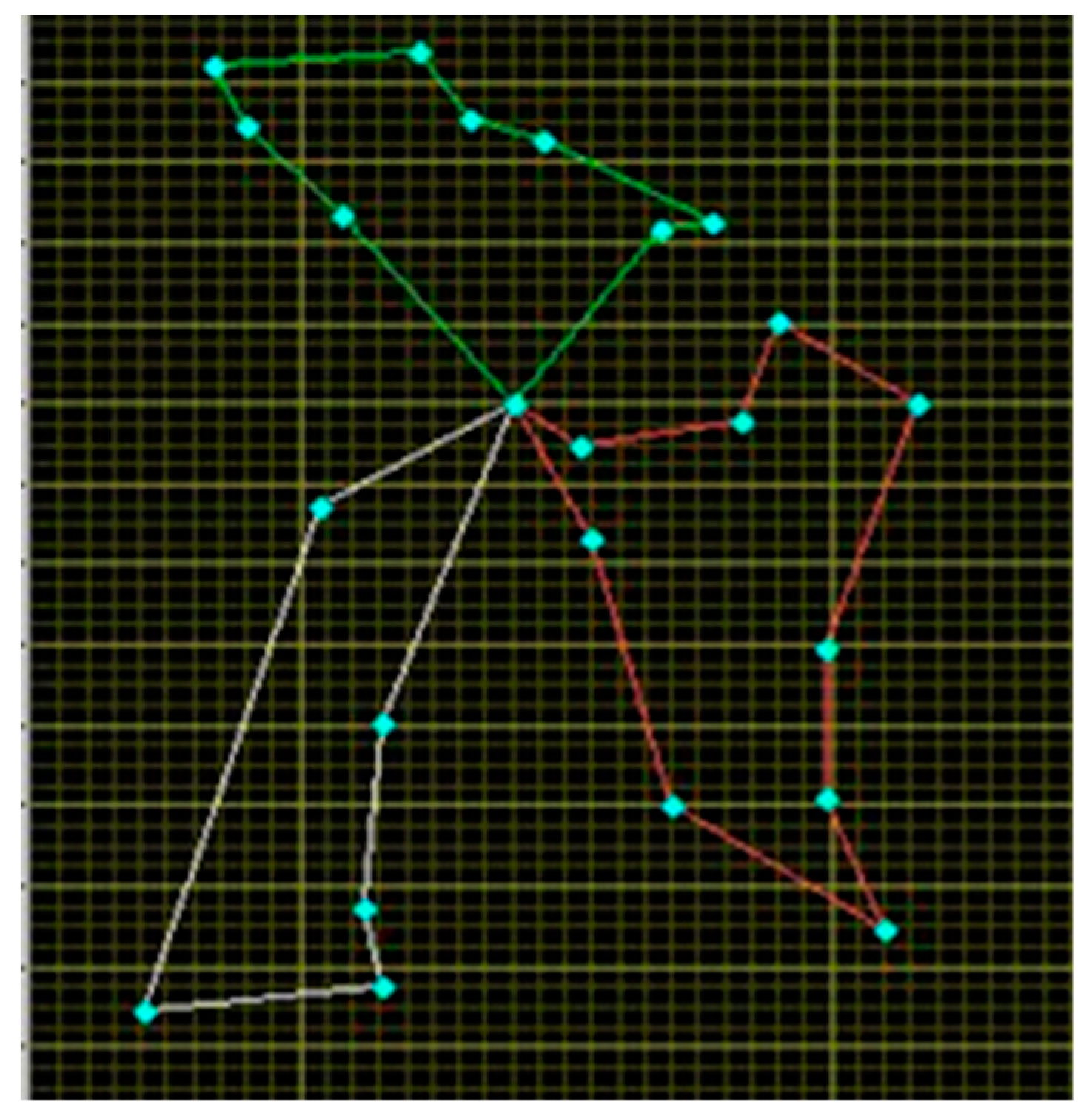
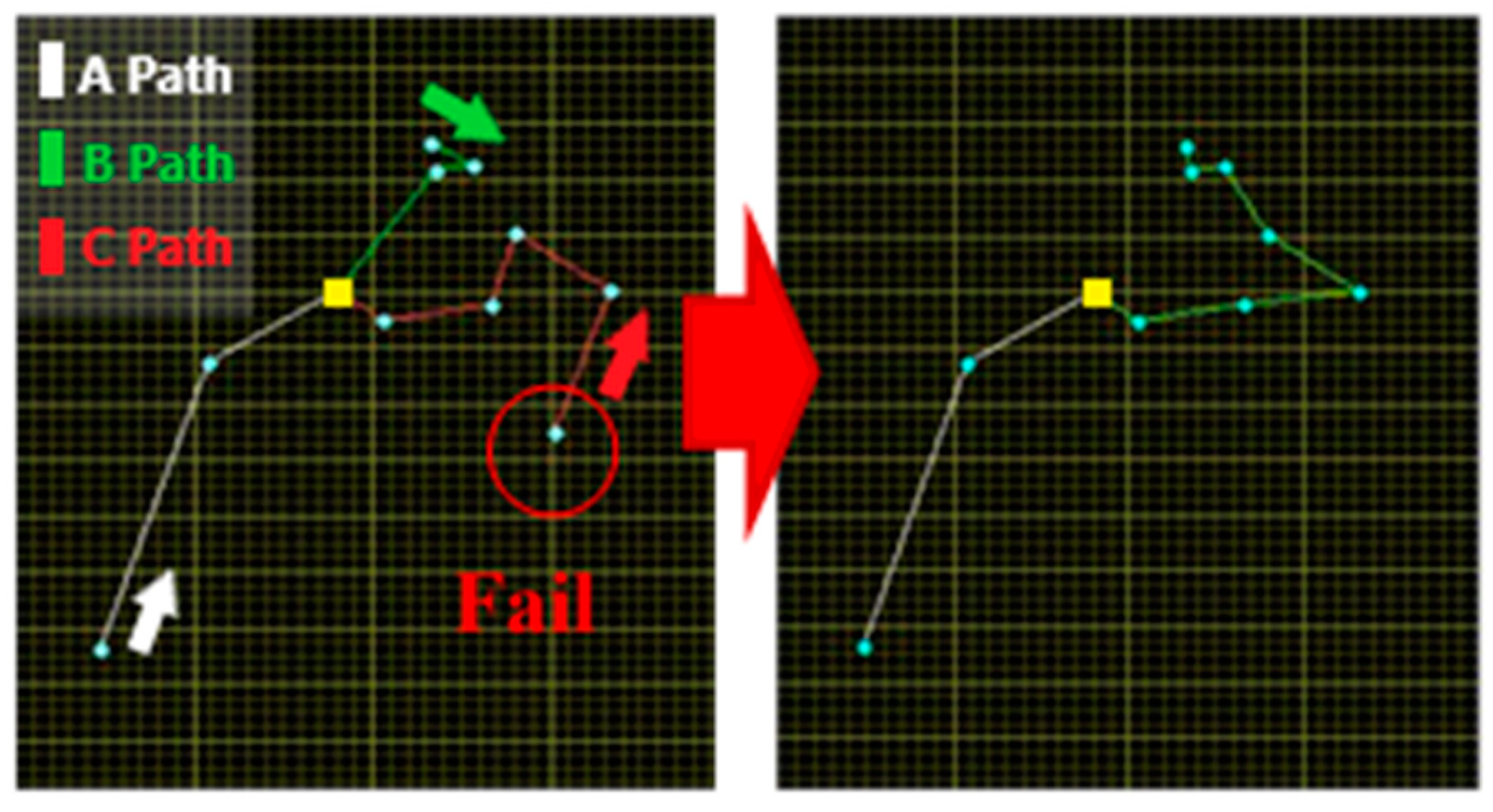
5.1.3. Test of Complementation of the Failed Task
5.2. Benchmark Test and Comparison
5.3. Tests and Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Luan, Y.; Xue, H.; Song, B. The Simulation of the Human-Machine Partnership in UCAV Operation. In Proceedings of the 26th International Congress of the Aeronautical Sciences, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Cai, B. Path Programming for Autonomous Unmanned Vehicle System. Bachelor’s Thesis, National Formosa University (NFU), Yunlin, Taiwan, 2015. [Google Scholar]
- Tsai, P.; Lin, Y.; Chou, L. Combining corner detection and Dijkstra algorithm for shortest path search and application. J. China Inst. Technol. 2008, 38, 65–83. [Google Scholar]
- Hart, P.; Nilsson, N.; Raphael, B. A formal basic for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Lin, S. A Study of Pathfinding Algorithm in Game AI. Master’s Thesis, Lunghwa University of Science and Technology, Taoyuan, Taiwan, 2013. [Google Scholar]
- Xie, S.; Cheng, W. AGV path planning based on smoothing A* algorithm. IJSEA 2015, 6, 21–27. [Google Scholar]
- Maity, D.S.; Goswami, S. Multipath data transmission with minimization of congestion using ant colony optimization for MTSP and total queue length. IJLRST 2013, 2, 109–114. [Google Scholar]
- Sariel-Talay, S.; Balch, T.R.; Erdogan, N. Multiple traveling robot problem: A solution based on dynamic task selection and robust execution. IEEE/ASME Trans. Mechatron. 2009, 14, 198–206. [Google Scholar] [CrossRef]
- Yousefikhoshbakht, M.; Didehvar, F.; Rahmati, F. Modification of the ant colony optimization for solving the multiple traveling salesman problem. ROMJIST 2013, 16, 65–80. [Google Scholar]
- Necula, R.; Breaban, M.; Raschip, M. Performance Evaluation of Ant Colony System for the Single-Depot Multiple Traveling Salesman Problem. In Proceedings of the 10th International Conference on Hybrid Artificial Intelligence Systems, Bilbao, Spain, 22–24 June 2015; pp. 257–268. [Google Scholar]
- Xu, M.; Li, S.; Guo, J. Optimization of Multiple Traveling Salesman Problem Based on Simulated Annealing Genetic Algorithm. In Proceedings of the MATEC Web of Conferences 100, Zhengzhou, China, 20–21 April 2017. [Google Scholar]
- Côté, J.F.; Potvin, J.Y. A Tabu search heuristic for the vehicle routing problem with private fleet and common carrier. EJOR 2009, 198, 464–469. [Google Scholar] [CrossRef]
- Liao, T.; Huang, W. A study of dynamic logistics based on two-phased method. IJAIT 2008, 2, 76–94. [Google Scholar]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. In Cooperative Robots and Sensor Networks 2015; Springer: Berlin, Germany, 2015; pp. 31–51. [Google Scholar]
- Balch, T.R. Social Entropy: A New Metric for Learning Multi-Robot Teams. In Proceedings of the 10th International FLAIRS Conference (FLAIRS-97), Daytona Beach, FL, USA, 12–14 May 1997; pp. 362–366. [Google Scholar]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Hung, F. Vehicle Routing Problem of Integrated Supply Medical Materials in Strategic Alliance Hospitals: A Study of One Medical Center. Bachelor’s Thesis, National Yunlin University of Science and Technology, Yunlin, Taiwan, 2004. [Google Scholar]
- Lin, S. Computer solutions of the traveling salesman problem. BSTJ 1965, 44, 2245–2269. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m (vehicles) | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 10 |
| n (nodes) | 5 | 10 | 15 | 20 | 25 | 30 | 40 | 50 |
| HGA | 198 | 316 | 456 | 512 | 612 | 692 | 828 | 998 |
| SA | 185 | 323 | 556 | 735 | 776 | 821 | 996 | 1270 |
| MSAGA | 193 | 299 | 413 | 474 | 576 | 668 | 778 | 956 |
| 2TS+2OPT | 209 | 291 | 417 | 472 | 509 | 569 | 661 | 784 |
| CPU Time (Sec.) | 0.12 | 0.08 | 0.3 | 0.5 | 1.6 | 2.3 | 2.7 | 6.5 |
| (Core I7 2.4 GHz CPU, 8 GB RAM) | ||||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, M.-T.; Chen, B.-Y.; Lu, W.-C. Failure-Robot Path Complementation for Robot Swarm Mission Planning. Appl. Sci. 2019, 9, 3756. https://doi.org/10.3390/app9183756
Lee M-T, Chen B-Y, Lu W-C. Failure-Robot Path Complementation for Robot Swarm Mission Planning. Applied Sciences. 2019; 9(18):3756. https://doi.org/10.3390/app9183756
Chicago/Turabian StyleLee, Meng-Tse, Bo-Yu Chen, and Wen-Chi Lu. 2019. "Failure-Robot Path Complementation for Robot Swarm Mission Planning" Applied Sciences 9, no. 18: 3756. https://doi.org/10.3390/app9183756
APA StyleLee, M.-T., Chen, B.-Y., & Lu, W.-C. (2019). Failure-Robot Path Complementation for Robot Swarm Mission Planning. Applied Sciences, 9(18), 3756. https://doi.org/10.3390/app9183756