Quantum Structure for Modelling Emotion Space of Robots


.png)
Abstract
1. Introduction
2. Preliminaries of QC and Emotional Plane
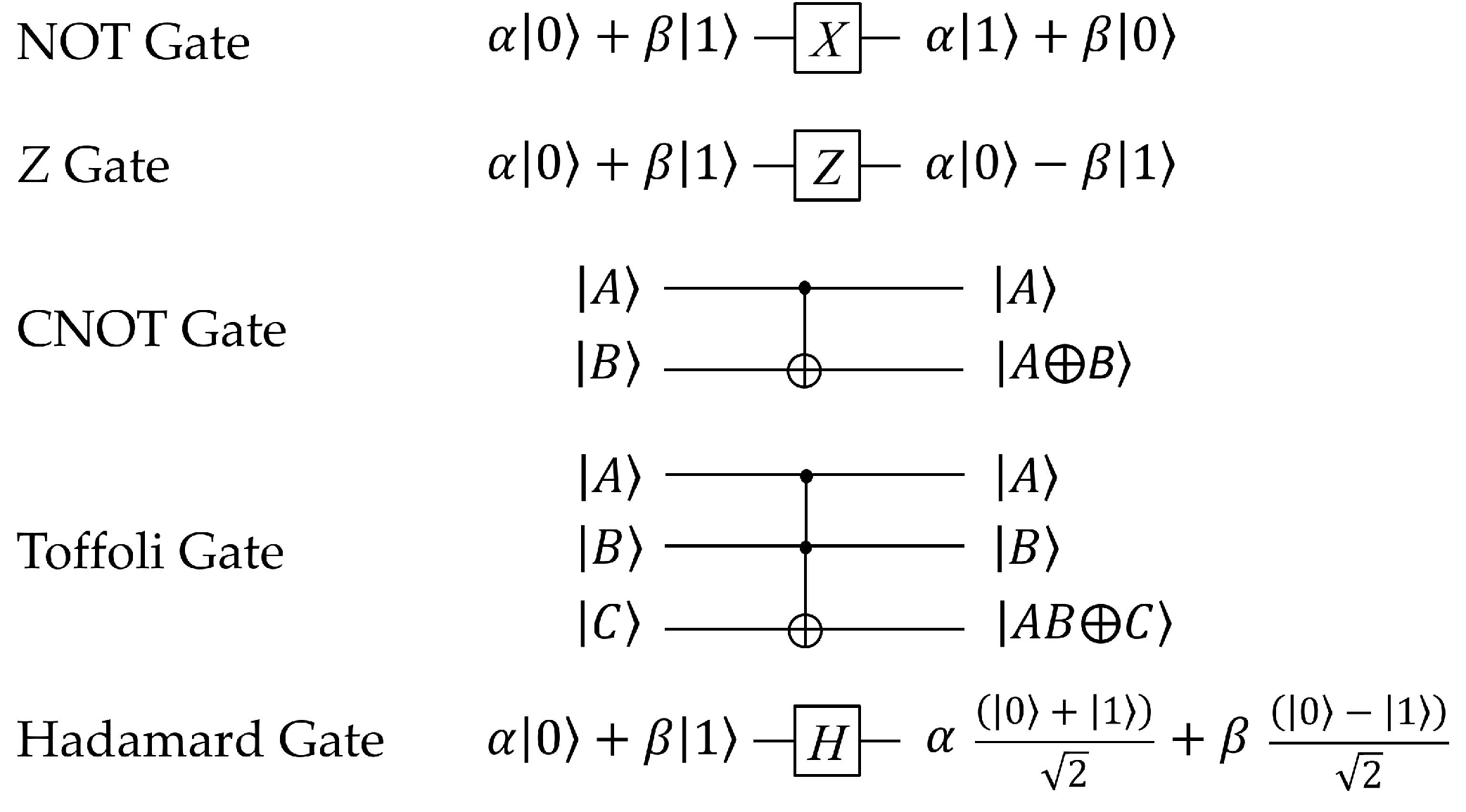
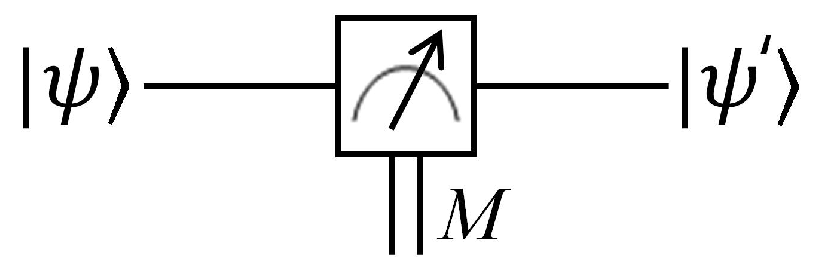
2.1. Quantum Bits and Quantum Gates
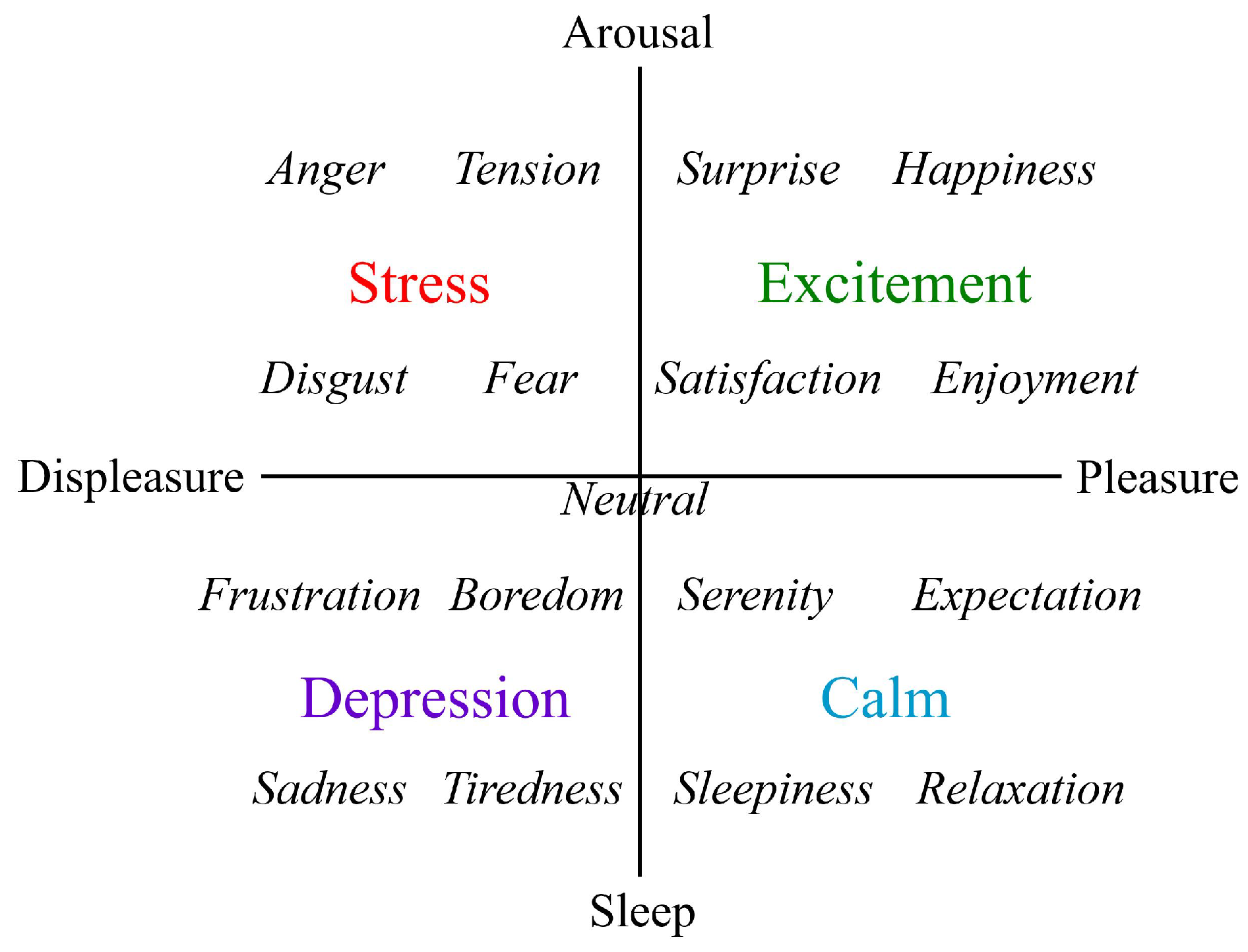
2.2. Modified PA Plane
3. Quantum Structure of Emotion Space
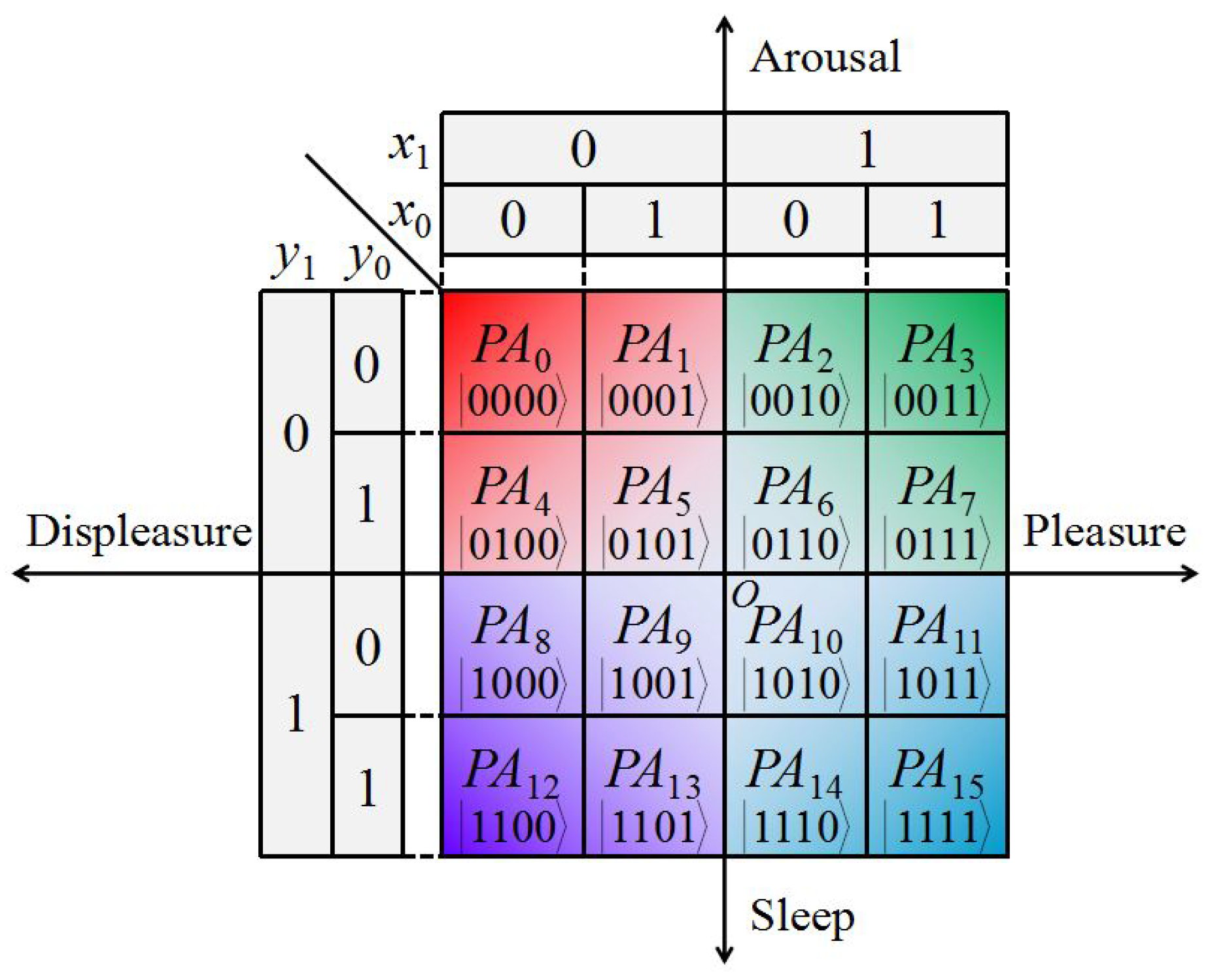
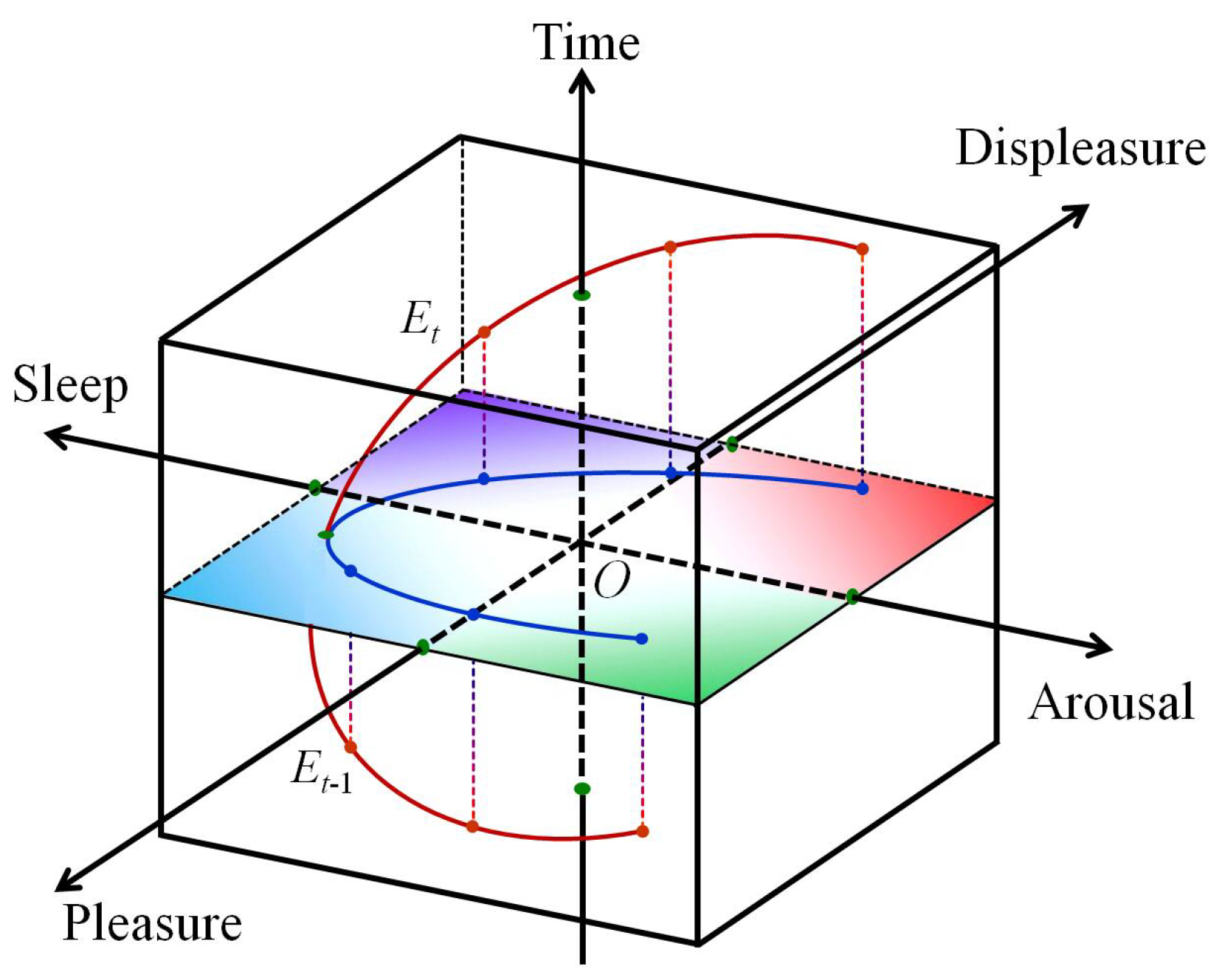
3.1. Quantum Version of PA Plane
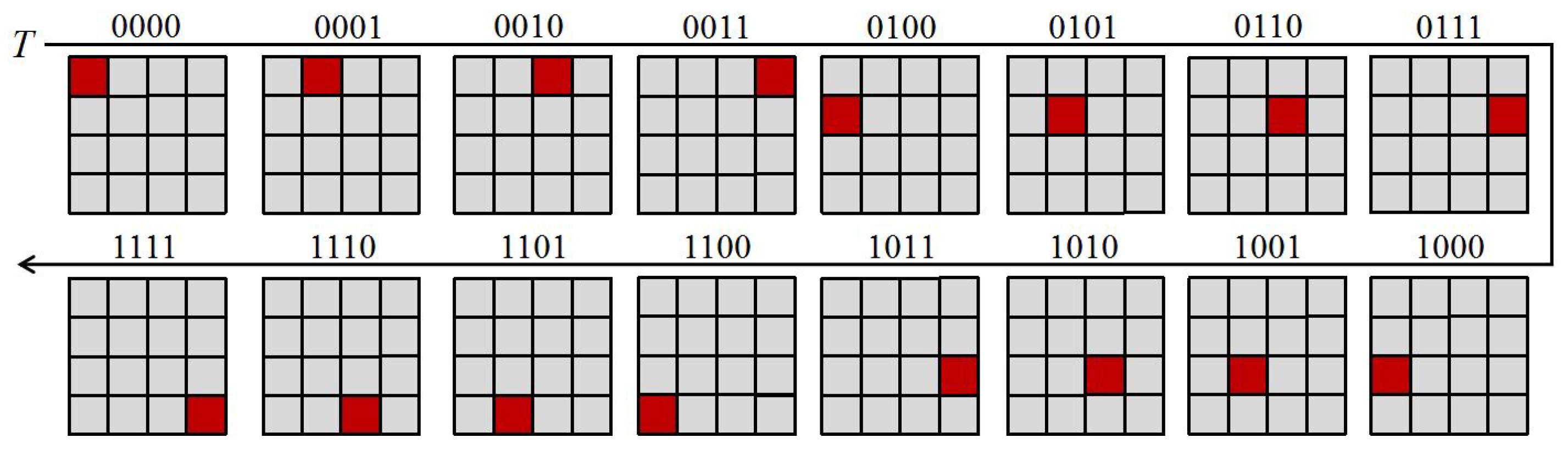
3.2. Representation for QES
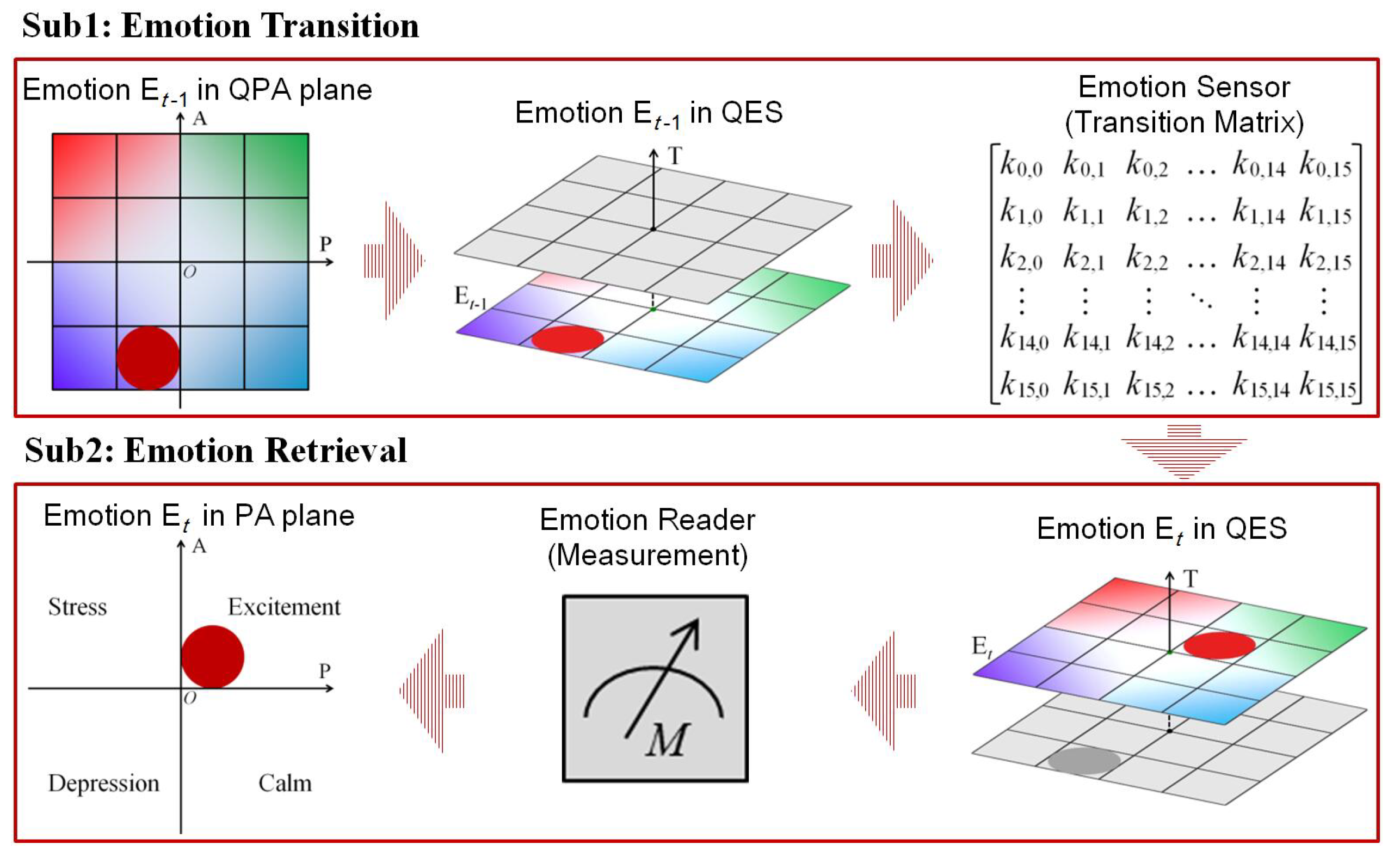
3.3. Emotion Transition Matrix
4. Quantum Emotion Manipulation and Retrieval
4.1. Procedure of Quantum Emotion Transition
4.2. Quantum Emotion Initialisation and Transition
4.3. Example to Illustrate Quantum Emotion Manipulation
4.4. Quantum Emotion Retrieval from QES
5. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Colman, A. A Dictionary of Psychology, 3rd ed.; Oxford University Press: Oxford, UK, 2009. [Google Scholar]
- Yamazaki, Y.; Hatakeyama, Y.; Dong, F.; Nomoto, K.; Hirota, K. Fuzzy inference based mentality expression for eye robot in affinity pleasure-arousal space. J. Adv. Comput. Intell. Intell. Inform. 2008, 12, 304–313. [Google Scholar] [CrossRef]
- Russell, J.; Fernandez-Dols, J. Reading Emotion from and into Faces—The Psychology of Facial Expression; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Miwa, H.; Umetsu, T.; Takanishi, A.; Takanobu, H. Robot personality based on the equations of emotion defined in the 3D mental space. In Proceedings of the IEEE International Conference on Robotics & Automation, Seoul, Korea, 21–26 May 2001; pp. 2602–2607. [Google Scholar]
- Liu, Z.T.; Li, D.Y.; Chen, L.F.; Dong, F.Y.; Yamazaki, Y.; Hirota, K. Concept of fuzzy atmosfield for representing communication atmosphere and its application to humans-robots interaction. J. Adv. Comput. Intell. Intell. Inform. 2013, 17, 3–17. [Google Scholar] [CrossRef]
- Hamilton, C. On the Possibility of Robots Having Emotions. Master’s Thesis, Georgia State University, Atlanta, GA, USA, 2014. [Google Scholar]
- Picard, R. Affective computing. LGI Glob. 1997, 1, 71–73. [Google Scholar]
- Nielsen, M.; Chuang, I. Quantum Computation and Quantum Information; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Lukac, M.; Perkowski, M. Quantum mechanical model of emotional robot behaviors. In Proceedings of the 37th International Symposium on Multiple-Valued Logic, Oslo, Norway, 13–16 May 2007. [Google Scholar]
- Raghuvanshi, A.; Perkowski, M. Fuzzy quantum circuits to model emotional behaviors of humanoid robots. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010. [Google Scholar]
- Raghuvanshi, A.; Perkowski, M. Using fuzzy quantum logic to learn facial gestures of a Schrödinger cat puppet for robot theatre. In Proceedings of the 38th International Symposium on Multiple-Valued Logic (ISMVL 2008), Dallas, TX, USA, 22–23 May 2008. [Google Scholar]
- Yan, F.; Iliyasu, A.M.; Liu, Z.T.; Salama, A.S.; Dong, F.; Hirota, K. Bloch sphere-based representation for quantum emotion space. J. Adv. Comput. Intell. Intell. Inform. 2015, 19, 134–142. [Google Scholar] [CrossRef]
- Iliyasu, A.M.; Le, P.Q.; Dong, F.; Hirota, K. Watermarking and authentication of quantum images based on restricted geometric transformations. Inf. Sci. 2012, 186, 126–149. [Google Scholar] [CrossRef]
- Yan, F.; Iliyasu, A.M.; Venegas-Andraca, S.E. A survey of quantum image representations. Quantum Inf. Process. 2016, 15, 1–35. [Google Scholar] [CrossRef]
- Benioff, P. Quantum robots and environments. Phys. Rev. A 1998, 58, 893–904. [Google Scholar] [CrossRef]
- Dong, D.; Chen, C.; Zhang, C.; Chen, Z. An autonomous mobile robot based on quantum algorithm. In Lecture Notes Computuer Science; Springer: Berlin/Heidelberg, Germany, 2005; pp. 393–398. [Google Scholar]
- Petschnigg, C.; Brandstötter, M.; Pichler, H.; Hofbaur, M.; Dieber, B. Quantum computation in robotic science and applications. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Iliyasu, A. Roadmap to talking quantum movies: A contingent inquiry. IEEE Access 2019, 7, 23864–23913. [Google Scholar] [CrossRef]
- Iliyasu, A.M.; Le, P.Q.; Dong, F.; Hirota, K. A framework for representing and producing movies on quantum computers. Int. J. Quantum Inf. 2011, 9, 1459–1497. [Google Scholar] [CrossRef]
- Cañamero, D. A hormonal model of emotions for behavior control. In 4th European Conference on Artificial Life; MIT Press: Cambridge, MA, USA, 1997. [Google Scholar]
- Maeda, Y.; Tanabe, N. Basic study on interactive emotional communication by pet-type robot. Trans. Soc. Instrum. Control Eng. 2006, 42, 359–366. [Google Scholar] [CrossRef][Green Version]
- Taki, R.; Maeda, Y.; Takahashi, Y. Effective emotional model of pet-type robot in interactive emotion communication. In Proceedings of the Joint International Conference SCIS & ISIS, Okayama, Japan, 8–12 December 2010; pp. 199–204. [Google Scholar]
- Yan, F.; Iliyasu, A.M.; Guo, Y.; Yang, H. Flexible representation and manipulation of audio signals on quantum computers. Theor. Comput. Sci. 2018, 723, 37–51. [Google Scholar] [CrossRef]
- Yan, F.; Iliyasu, A.M.; Khan, A.R.; Yang, H. Measurements-based moving target detection in quantum video. Int. J. Theor. Phys. 2016, 55, 2162–2173. [Google Scholar] [CrossRef]
- Williams, Q.; Bogner, S.; Kelley, M.; Castillo, C.; Lukac, M.; Kim, D.H.; Allen, J.S.; Sunardi, M.I.; Hossain, S.; Perkowski, M. An emotional mimicking humanoid biped robot and its quantum control based on the constraint satisfaction model. In Proceedings of the 16th International Workshop on Post-Binary ULSI Systems, Oslo, Norway, 13–16 May 2007. [Google Scholar]
- Lukac, M.; Giesecke, N.; Hossain, S.; Perkowski, M.A. Quantum behaviors: Synthesis and measurement. In Proceedings of the 37th International Symposium on Multiple-Valued Logic, Oslo, Norway, 13–16 May 2007. [Google Scholar]
- Lukac, M.; Perkowski, M. Inductive learning and quantum behaviors. Facta Universitatis-Ser. Electron. Energ. 2007, 20, 561–586. [Google Scholar] [CrossRef]
- Raghuvanshi, A.; Fan, Y.; Woyke, M.; Perkowski, M. Quantum robots for teenagers. In Proceedings of the 37th International Symposium on Multiple-Valued Logic, Oslo, Norway, 13–16 May 2007. [Google Scholar]
- Alonso-Martin, F.; Malfaz, M.; Sequeira, J.; Gorostiza, J.; Salichs, M. A multimodal emotion detection system during human–robot interaction. Sensors 2013, 13, 15549–15581. [Google Scholar] [CrossRef] [PubMed]
- Preskill, J. Quantum computing in the NISQ era and beyond. Quantum 2018, 2, 79. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quadrant | Emotions | State |
|---|---|---|
| anger | tension | surprise | happiness |
| disgust | fear | satisfaction | enjoyment |
| frustration | boredom | serenity | expectation |
| sadness | tiredness | sleepiness | relaxation |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, F.; Iliyasu, A.M.; Jiao, S.; Yang, H. Quantum Structure for Modelling Emotion Space of Robots. Appl. Sci. 2019, 9, 3351. https://doi.org/10.3390/app9163351
Yan F, Iliyasu AM, Jiao S, Yang H. Quantum Structure for Modelling Emotion Space of Robots. Applied Sciences. 2019; 9(16):3351. https://doi.org/10.3390/app9163351
Chicago/Turabian StyleYan, Fei, Abdullah M. Iliyasu, Sihao Jiao, and Huamin Yang. 2019. "Quantum Structure for Modelling Emotion Space of Robots" Applied Sciences 9, no. 16: 3351. https://doi.org/10.3390/app9163351
APA StyleYan, F., Iliyasu, A. M., Jiao, S., & Yang, H. (2019). Quantum Structure for Modelling Emotion Space of Robots. Applied Sciences, 9(16), 3351. https://doi.org/10.3390/app9163351