Real-Time Implementation of an Expert Model Predictive Controller in a Pilot-Scale Reverse Osmosis Plant for Brackish and Seawater Desalination

 ,
,  ,
,  and
and 
Abstract
1. Introduction
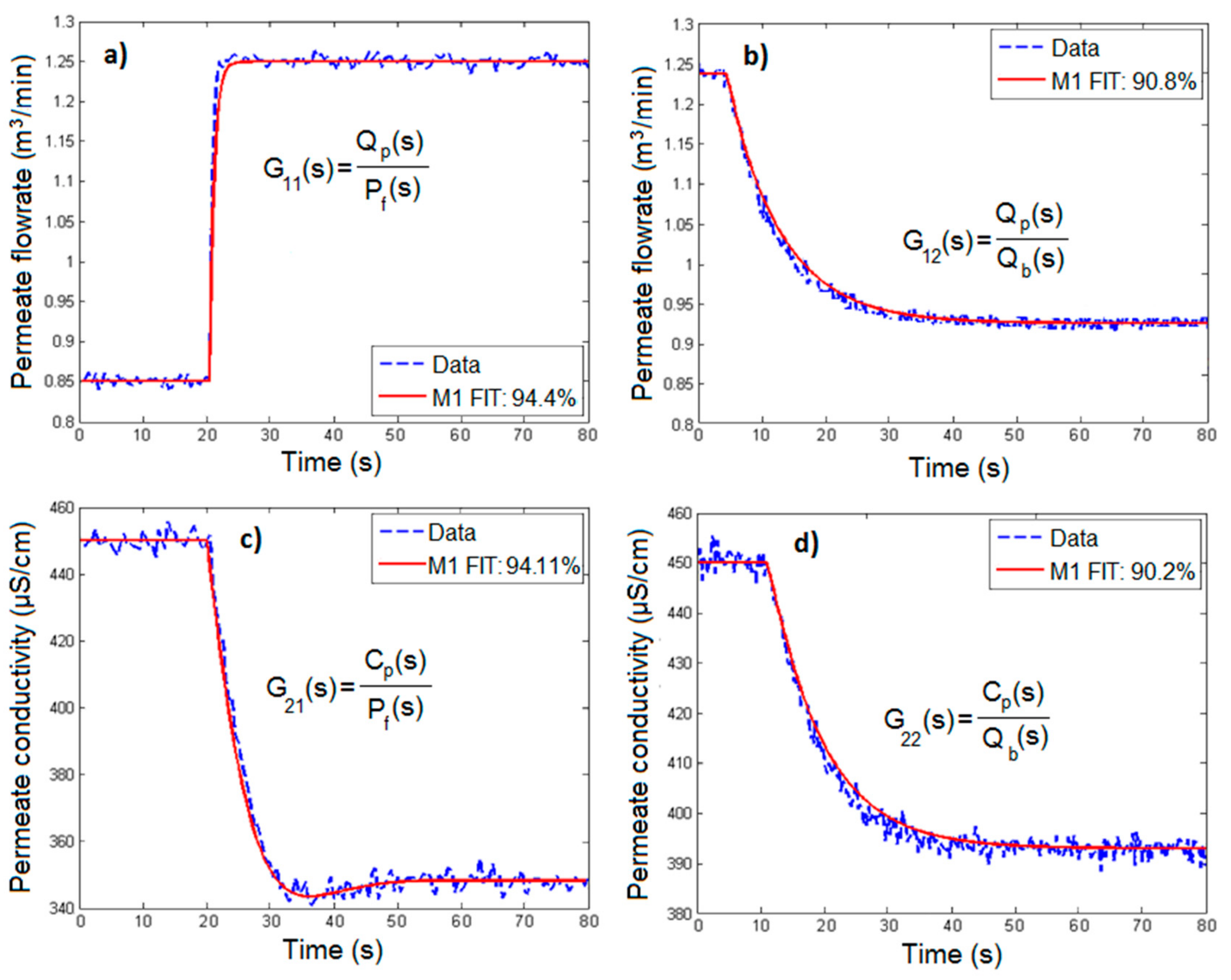
2. System Identification of the Pilot-Scale Seawater RO Desalination Plant
3. Expert Model Predictive Controller Design
4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, M.; Sun, H.; Singh, V.P.; Zhou, Y.; Ma, M. Agricultural water resources management using maximum entropy and entropy-weight-based TOPSIS methods. Entropy 2019, 21, 364. [Google Scholar] [CrossRef]
- Gharab, S.; Feliu-Batlle, V.; Rivas-Perez, R. A fractional-order partially non-linear model of a laboratory prototype of hydraulic canal system. Entropy 2019, 21, 309. [Google Scholar] [CrossRef]
- Pedro-Monzonís, M.; Solera, A.; Ferrer, J.; Estrela, T.; Paredes-Arquiola, J. A review of water scarcity and drought indexes in water resources planning and management. J. Hydrol. 2015, 527, 482–493. [Google Scholar] [CrossRef]
- Gleick, P.H. The world’s water. In The Biennial Report on Freshwater Resources; Island Press: Washington, DC, USA, 2011; Volume 7. [Google Scholar]
- Arenas-Sánchez, A.; Rico, A.; Vighi, M. Effects of water scarcity and chemical pollution in aquatic ecosystems: State of the art. Sci. Total Environ. 2016, 572, 390–403. [Google Scholar] [CrossRef] [PubMed]
- Al-Jawad, J.Y.; Alsaffar, H.M.; Bertram, D.; Kalin, R.M. A comprehensive optimum integrated water resources management approach for multidisciplinary water resources management problems. J. Environ. Manag. 2019, 239, 211–224. [Google Scholar] [CrossRef]
- Calderon-Valdez, S.N.; Rivas-Perez, R.; Ruiz-Torija, M.A.; Feliu-Batlle, V. Fractional PI controller design with optimized robustness to time delay changes in main irrigation canals. In Proceedings of the 14th IEEE Conference on Emerging Technologies and Factory Automation, Palma de Mallorca, Spain, 23–25 September 2009; pp. 1411–1417. [Google Scholar]
- Loucks, D.P.; van Beek, E. Water resources systems planning and management. In An Introduction to Methods, Models and Applications; UNESCO: Paris, France, 2005. [Google Scholar]
- Rivas-Perez, R.; Feliu-Batlle, V.; Castillo-Garcia, F.; Linares-Saez, A. Mathematical model for robust control of an irrigation main canal pool. Environ. Model. Softw. 2014, 51, 207–220. [Google Scholar] [CrossRef]
- Gao, L.; Yoshikawa, S.; Iseri, Y.; Fujimori, S.; Kanae, S. An economic assessment of the global potential for seawater desalination to 2050. Water 2017, 9, 763. [Google Scholar] [CrossRef]
- Wang, L.K.; Chen, J.P.; Hung, Y.-T.; Shammas, N.K. Handbook of Environmental Engineering: Membrane and Desalination Technology; Humana Press: New York, NY, USA, 2011; Volume 13. [Google Scholar]
- Schiffler, M. Perspectives and challenges for desalination in the 21st century. Desalination 2004, 165, 1–9. [Google Scholar]
- Ghaffour, N.; Missimer, T.M.; Amy, G.L. Technical review and evaluation of the economics of water desalination: Current and future challenges for a better water supply sustainability. Desalination 2013, 309, 197–207. [Google Scholar] [CrossRef]
- Hanasaki, N.; Yoshikawa, S.; Kakinuma, K.; Kanae, S. A seawater desalination scheme for global hydrological models. Hydrol. Earth Syst. Sci. 2016, 20, 4143–4157. [Google Scholar] [CrossRef]
- Greenlee, L.F.; Lawler, D.F.; Freeman, B.D.; Marrot, B.; Moulin, P. Reverse osmosis desalination: Water sources, technology, and today’s challenges. Water Res. 2009, 43, 2317–2348. [Google Scholar] [CrossRef] [PubMed]
- Sudak, R. Reverse osmosis. In Handbook of Industrial Membrane Technology; Porter, M., Ed.; Noyes Publications: Park Ridge, NJ, USA, 1990; pp. 260–306. [Google Scholar]
- Voutchkov, N. Desalination Engineering: Planning and Design; McGraw Hill Professional: New York, NY, USA, 2011. [Google Scholar]
- Fritzmann, C.; Löwenberg, J.; Wintgens, T.; Melin, T. State-of-the-art of reverse osmosis desalination. Desalination 2007, 216, 1–76. [Google Scholar] [CrossRef]
- Stillwell, A.S.; Webber, M.E. Predicting the specific energy consumption of reverse osmosis desalination. Water 2016, 8, 601. [Google Scholar] [CrossRef]
- Miller, S.; Shemer, H.; Semiat, R. Energy and environmental issues in desalination. Desalination 2015, 366, 2–8. [Google Scholar] [CrossRef]
- Zarai, N.; Tadeo, F.; Chaabene, M. Planning of the operating points in desalination plants based on energy optimization. Int. J. Comp. Appl. 2013, 68, 6–11. [Google Scholar] [CrossRef]
- Mistry, K.H.; McGovern, R.K.; Thiel, G.P.; Summers, E.K.; Zubair, S.M.; Lienhard, V.J.H. Entropy generation analysis of desalination technologies. Entropy 2011, 13, 1829–1864. [Google Scholar] [CrossRef]
- Warsinger, D.M.; Mistry, K.H.; Nayar, K.G.; Chung, H.W.; Lienhard, V.J.H. Entropy generation of desalination powered by variable temperature waste heat. Entropy 2015, 17, 7530–7566. [Google Scholar] [CrossRef]
- Wilf, M.; Klinko, K. Optimization of seawater RO systems design. Desalination 2001, 138, 299–306. [Google Scholar] [CrossRef]
- Peñate, B.; García-Rodríguez, L. Current trends and future prospects in the design of seawater reverse osmosis desalination technology. Desalination 2012, 284, 1–8. [Google Scholar] [CrossRef]
- Elimelech, M.; Phillip, W.A. The future of seawater desalination: Energy, technology, and the environment. Science 2011, 333, 712–717. [Google Scholar] [CrossRef]
- Alatiqi, I.; Ettourney, H.; El-Dessouky, H. Process control in water desalination industry: An overview. Desalination 1999, 126, 15–32. [Google Scholar] [CrossRef]
- Ghobeity, A.; Mitsos, A. Optimal time-dependent operation of seawater reverse osmosis. Desalination 2010, 263, 76–88. [Google Scholar] [CrossRef]
- Emad, A.; Ajbar, A.; Almutaz, I. Periodic control of a reverse osmosis desalination process. J. Process Control 2012, 22, 218–227. [Google Scholar] [CrossRef]
- Assef, J.Z.; Watters, C.J.; Deshpande, P.B.; Alatiqi, I.M. Advanced control of a reverse osmosis desalination unit. J. Process Control 1997, 7, 283–289. [Google Scholar] [CrossRef]
- Sobana, S.; Panda, R.C. Review on modelling and control of desalination system using reverse osmosis. Rev. Environ. Sci. Biotechnol. 2011, 10, 139–150. [Google Scholar] [CrossRef]
- Al-haj, A.M.; Ajbar, A.; Ali, E.; Alhumaizi, K. Robust model-based control of a tubular reverse-osmosis desalination unit. Desalination 2010, 255, 129–136. [Google Scholar]
- Abbas, A. Model predictive control of a reverse osmosis desalination unit. Desalination 2006, 194, 268–280. [Google Scholar] [CrossRef]
- Phuc, B.D.H.; You, S.-S.; Lim, T.-W.; Kim, H.-S. Dynamical analysis and control synthesis of RO desalination process against water hammering. Desalination 2017, 402, 133–142. [Google Scholar] [CrossRef]
- Gu, H.; Bartman, A.R.; Uchymiak, M.; Christofides, P.D.; Cohen, Y. Self-adaptive feed flow reversal operation of reverse osmosis desalination. Desalination 2013, 308, 63–72. [Google Scholar] [CrossRef]
- Ruiz-García, A.; Melián-Martel, N.; Nuez, I. A Critical review on predicting fouling in RO desalination. Membranes 2017, 7, 62. [Google Scholar] [CrossRef]
- McFall, C.W.; Bartman, A.R.; Christofides, P.D.; Cohen, Y. Control and monitoring of a high recovery reverse-osmosis desalination process. Ind. Eng. Chem. Res. 2008, 47, 6698–6710. [Google Scholar] [CrossRef]
- Alotaibi, S.; Ibrahim, O.M.; Wang, Y.; Luo, T. Exergy analysis of directional solvent extraction desalination process. Entropy 2019, 21, 321. [Google Scholar] [CrossRef]
- Shahzad, M.W.; Burhan, M.; Ybyraiymkul, D.; Ng, K.C. Desalination processes’ efficiency and future roadmap. Entropy 2019, 21, 84. [Google Scholar] [CrossRef]
- Mistry, K.H.; Lienhard, V.J.H. Generalized least energy of separation for desalination and other chemical separation processes. Entropy 2013, 15, 2046–2080. [Google Scholar] [CrossRef]
- Alatiqi, I.M.; Ghabris, A.H.; Ebrahim, S. System identification and control of reverse osmosis desalination. Desalination 1989, 75, 119–140. [Google Scholar] [CrossRef]
- AlDhaifallah, M.M.; Sassi, K.M.; Mujtaba, I.M. PID control of reverse osmosis based desalination process. Comput. Aided Chem. Eng. 2012, 30, 812–816. [Google Scholar]
- Sobana, S.; Panda, R.C. Modeling and control of reverse osmosis desalination process using centralized and decentralized techniques. Desalination 2014, 344, 243–251. [Google Scholar] [CrossRef]
- Gambier, A.; Wellenreuther, A.; Badreddin, E. Control system design of reverse osmosis plants by using advanced optimization techniques. Desalin. Water Treat. 2009, 10, 200–209. [Google Scholar] [CrossRef]
- Li, D.; Yang, N.; Niu, R.; Qiu, H.; Xi, Y. FPGA based QDMC control for reverse-osmosis water desalination system. Desalination 2012, 285, 83–90. [Google Scholar] [CrossRef]
- Bartman, A.R.; Christofides, P.D.; Cohen, Y. Nonlinear model-based control of an experimental reverse osmosis water desalination system. Ind. Eng. Chem. Res. 2009, 48, 6126–6136. [Google Scholar] [CrossRef]
- Bartman, A.R.; McFall, C.W.; Christofides, P.D.; Cohen, Y. Model-predictive control of feed flow reversal in a reverse osmosis desalination process. J. Process Control 2009, 19, 433–442. [Google Scholar] [CrossRef]
- Robertson, M.W.; Watters, J.C.; Desphande, P.B.; Assef, J.Z.; Alatiqi, I.M. Model based control for reverse osmosis desalination processes. Desalination 1996, 104, 59–68. [Google Scholar] [CrossRef]
- Feliu-Batlle, V.; Rivas-Perez, R.; Linares-Saez, A. Fractional order robust control of a reverse osmosis seawater desalination plant. IFAC-PapersOnLine 2017, 50, 14545–14550. [Google Scholar] [CrossRef]
- Gambier, A. Control of a reverse osmosis plant by using a robust PID design based on multi-objective optimization. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 7045–7050. [Google Scholar]
- Phuc, B.D.H.; You, S.-S.; Lim, T.-W.; Kim, H.-S. Modified PID control with H∞ loop shaping synthesis for RO desalination plants. Desalin. Water Treat. 2016, 57, 25421–25434. [Google Scholar] [CrossRef]
- Zebbar, M.; Messlem, Y.; Gouichiche, A.; Tadjine, M. Super-twisting sliding mode control and robust loop shaping design of RO desalination process powered by PV generator. Desalination 2019, 458, 122–135. [Google Scholar] [CrossRef]
- Rivas-Perez, R.; Feliu-Batlle, V.; Castillo-Garcia, F.J.; Sanchez-Rodriguez, L.; Linares Saez, A. Robust fractional order controller implemented in the first pool of the Imperial de Aragon main canal. Tecnol. Cienc. Del Agua 2014, 5, 23–42. [Google Scholar]
- Aström, K.; Hägglund, T. Control PID Avanzado; Pearson Educación, S.A.: Madrid, Spain, 2009. [Google Scholar]
- Kao, T.G.; Nguen, M.; Rivas-Perez, R. Adaptive control of a time-delay plant using a searchless model-reference self-tuning system. Autom. Remote Control 1989, 49, 1620–1627. [Google Scholar]
- Rivas-Perez, R.; Castillo-Garcia, F.J.; Sotomayor-Moriano, J.; Feliu-Batlle, V. Control robusto de orden fraccionario de la presión del vapor en el domo superior de una caldera bagacera. Rev. Iberoam. De Automática E Inf. Ind. 2014, 11, 20–31. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C. Model Predictive Control in the Process Industry; Springer-Verlag: London, UK, 2012. [Google Scholar]
- Martín-Sánchez, J.M.; Rodellar, J. ADEX Optimized Adaptive Controllers and Systems: From Research to Industrial Practice; Springer-Verlag: London, UK, 2015. [Google Scholar]
- Lucci, S.; Kopec, D. Artificial Intelligence in the 21st Century (Computer Science), 2nd ed.; Mercury Learning and Information: Herndon, VA, USA, 2015. [Google Scholar]
- Cai, Z.X. Intelligent Control: Principles, Techniques and Applications; World Scientific Publishing Co. Pte. Ltd.: Singapore, 1997. [Google Scholar]
- Russell, S.J.; Norvig, P. Artificial Intelligence. A Modern Approach, 3rd ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Norris, D.J. Beginning Artificial Intelligence with the Raspberry Pi; Apress Inc.: Barrington, NH, USA, 2017. [Google Scholar]
- Vizureanu, P. Advances in Expert Systems; InTech: London, UK, 2014. [Google Scholar]
- Lucas, P.J.F.; van der Gaag, L.C. Principles of Expert Systems; Addison-Wesley: Boston, MA, USA, 1991. [Google Scholar]
- Jovic, F.; Jovic, F.L. Expert Systems in Process Control; Springer-Verlag: Berlin, Germany, 1992. [Google Scholar]
- Chen, X.S.; Shu-minFei, Q.L. Supervisory expert control for ball mill grinding circuits. Expert Syst. Appl. 2008, 34, 1877–1885. [Google Scholar] [CrossRef]
- Gámez García, J.; Gómez Ortega, J.; Satorres Martínez, S.; Sánchez García, A. Expert system based controller for the high-accuracy automatic assembly of vehicle headlamps. Expert Syst. Appl. 2011, 38, 12818–12825. [Google Scholar] [CrossRef]
- Bergh, L.; Ojeda, P.; Torres, L. Expert control tuning of an industrial thickener. IFAC-PapersOnLine 2015, 48, 86–91. [Google Scholar] [CrossRef]
- Wu, M.; She, J.H.; Nakano, M. An expert control system using neural networks for the electrolytic process in zinc hydrometallurgy. Eng. Appl. Artif. Intell. 2002, 14, 589–598. [Google Scholar] [CrossRef]
- Tzafestas, S.G. Expert Systems in Engineering Applications; Springer-Verlag: Berlin, Germany, 1993. [Google Scholar]
- Martín-Sánchez, J.M.; Rodellar, J. Adaptive Predictive Expert Control: Methodology, Design and Application; Universidad Nacional de Educación a Distancia (UNED): Madrid, Spain, 2005. [Google Scholar]
- Aguilar, J.; Langarita, P.; Linares, L.; Rodellar, J.; Soler, J. Adaptive predictive expert control of levels in large canals for irrigation water distribution. Int. J. Adapt. Control Signal Process. 2012, 26, 945–960. [Google Scholar] [CrossRef]
- Rivas-Perez, R.; Sotomayor Moriano, J.; Perez-Zuñiga, C.G. Adaptive expert generalized predictive multivariable control of seawater RO desalination plant for a mineral processing facility. IFAC- PapersOnLine 2017, 50, 10244–10249. [Google Scholar] [CrossRef]
- Ljung, L. System Identification. Theory for the User; Prentice-Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Rivas-Perez, R.; Feliu-Batlle, V.; Castillo-Garcia, F.J.; Sanchez-Rodriguez, L.; Linares-Saez, A. Control oriented model of a complex irrigation main canal pool. IFAC Proc. Vol. 2011, 44, 2919–2924. [Google Scholar] [CrossRef]
- Abbas, A.; Al-Bastaki, N. Modeling of an RO water desalination unit using neural networks. Chem. Eng. J. 2005, 114, 139–143. [Google Scholar] [CrossRef]
- San-Millan, A.; Feliu-Talegón, D.; Feliu-Batlle, V.; Rivas-Perez, R. On the modelling and control of a laboratory prototype of a hydraulic canal based on a TITO fractional-order model. Entropy 2017, 19, 401. [Google Scholar] [CrossRef]
- Castillo-Garcia, F.J.; Feliu-Batlle, V.; Rivas-Perez, R.; Sanchez, L. Time domain tuning of a fractional order PIα controller combined with a Smith predictor for automation of water distribution in irrigation main channel pools. IFAC Proc. Vol. 2011, 44, 15049–15054. [Google Scholar] [CrossRef]
- Kumar, S.; Prasad, R. Importance of expert system shell in development of expert system. Int. J. Innov. Res. Dev. 2015, 4, 128–133. [Google Scholar]
- Skogestad, S. Simple analytic rules for model reduction and PID controllers tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef]
- Rivas-Perez, R.; Feliu-Batlle, V.; Sánchez Rodríguez, L.; Castillo Garcia, F.J.; Linares Sáez, A. Desarrollo de una nueva familia de controladores de orden fraccionario (FOC) para el control robusto de procesos productivos con comportamientos dinámicos difíciles e inciertos. Anales de la Academia de Ciencias de Cuba 2018, 8, 1–11. [Google Scholar]
- Batlle, V.F.; Pérez, R.R.; Rodriguez, L.S.; García, F.C.; Saez, A.L. Robust fractional order PI controller for a main irrigation canal pool. IFAC Proc. Vol. 2008, 41, 15535–15540. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control System | ||||
|---|---|---|---|---|
| First test scenario Expert MPC Permeate flow rate Permeate conductivity | - - 125 115 | - - 0 12.5 | - - 876.4 861.2 | - - 30.1 24.6 |
| Second test scenario Expert MPC Permeate flow rate Permeate conductivity MPC Permeate flow rate Permeate conductivity | - - 135 120 - 135 120 | - - 0 14.1 - 0 14.1 | - - 896.1 873.3 - 1384.3 1192.4 | - - 32.1 25.8 - 40.6 33.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rivas-Perez, R.; Sotomayor-Moriano, J.; Pérez-Zuñiga, G.; Soto-Angles, M.E. Real-Time Implementation of an Expert Model Predictive Controller in a Pilot-Scale Reverse Osmosis Plant for Brackish and Seawater Desalination. Appl. Sci. 2019, 9, 2932. https://doi.org/10.3390/app9142932
Rivas-Perez R, Sotomayor-Moriano J, Pérez-Zuñiga G, Soto-Angles ME. Real-Time Implementation of an Expert Model Predictive Controller in a Pilot-Scale Reverse Osmosis Plant for Brackish and Seawater Desalination. Applied Sciences. 2019; 9(14):2932. https://doi.org/10.3390/app9142932
Chicago/Turabian StyleRivas-Perez, Raul, Javier Sotomayor-Moriano, Gustavo Pérez-Zuñiga, and Mario E. Soto-Angles. 2019. "Real-Time Implementation of an Expert Model Predictive Controller in a Pilot-Scale Reverse Osmosis Plant for Brackish and Seawater Desalination" Applied Sciences 9, no. 14: 2932. https://doi.org/10.3390/app9142932
APA StyleRivas-Perez, R., Sotomayor-Moriano, J., Pérez-Zuñiga, G., & Soto-Angles, M. E. (2019). Real-Time Implementation of an Expert Model Predictive Controller in a Pilot-Scale Reverse Osmosis Plant for Brackish and Seawater Desalination. Applied Sciences, 9(14), 2932. https://doi.org/10.3390/app9142932