Artificial Neural Network for Vertical Displacement Prediction of a Bridge from Strains (Part 1): Girder Bridge under Moving Vehicles


Abstract
1. Introduction
2. Methodology
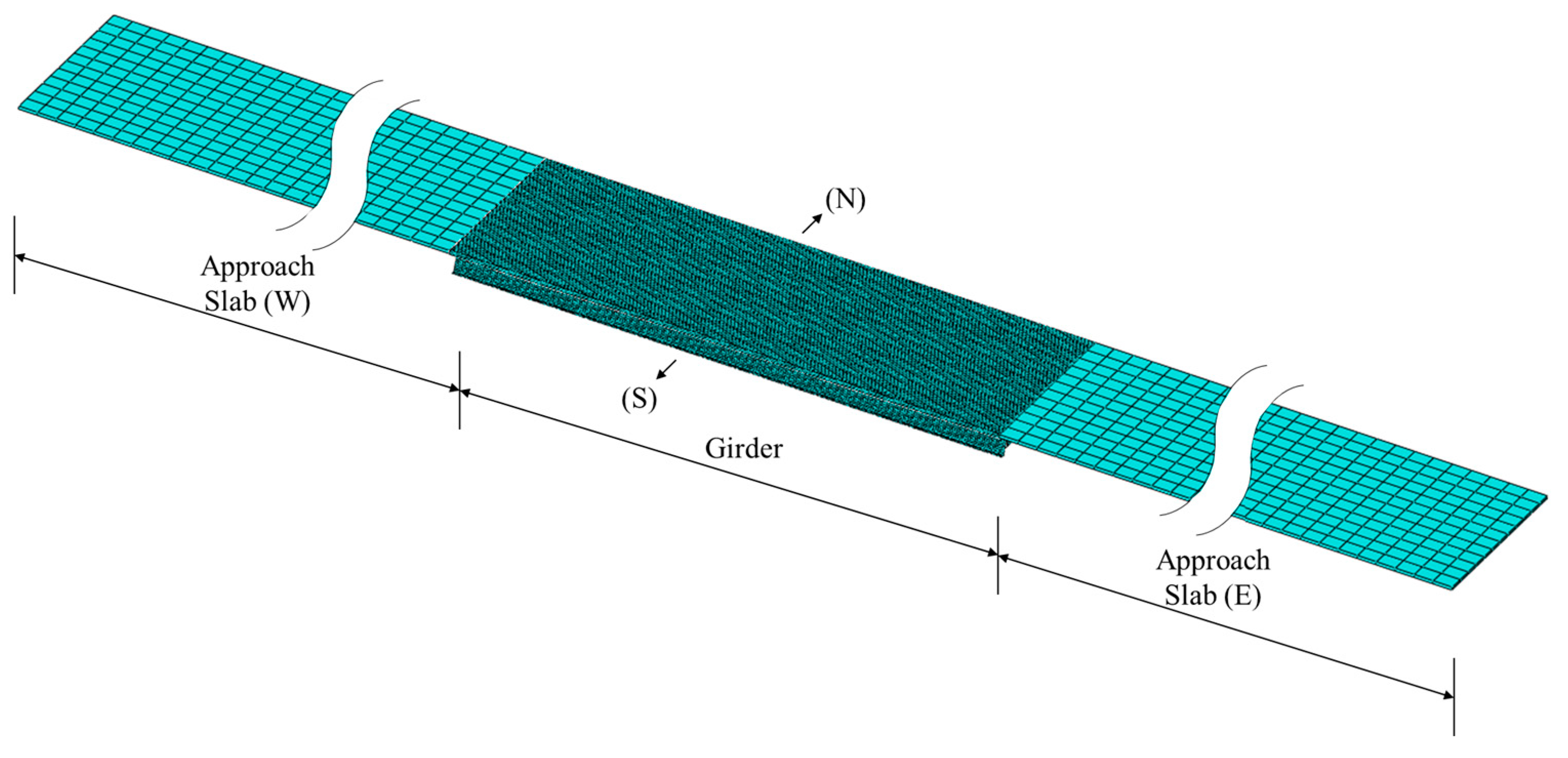
2.1. Numerical Model
2.2. Data Collection
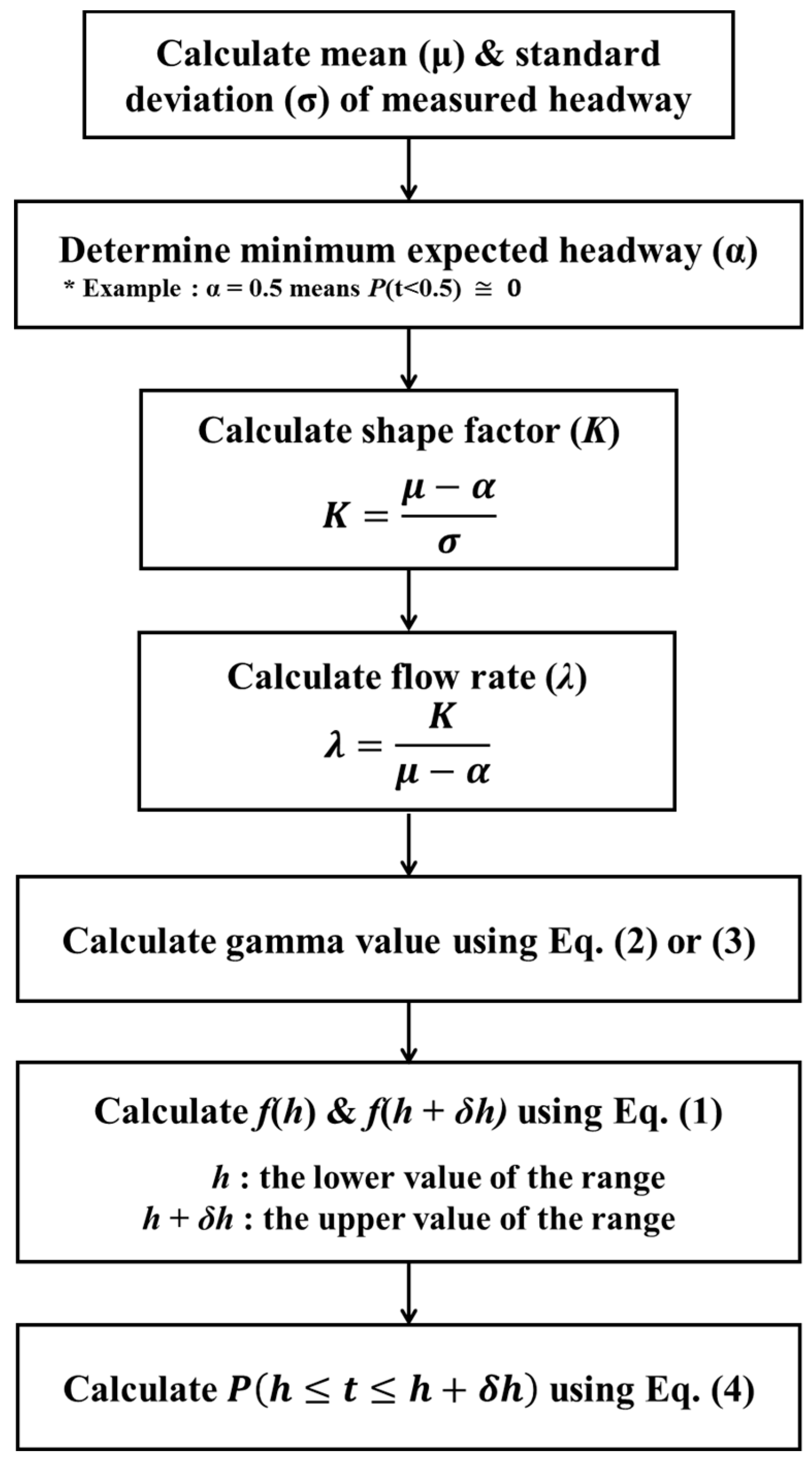
2.2.1. Pearson Type III Distribution
2.2.2. Load Scenarios
2.2.3. Data Collection
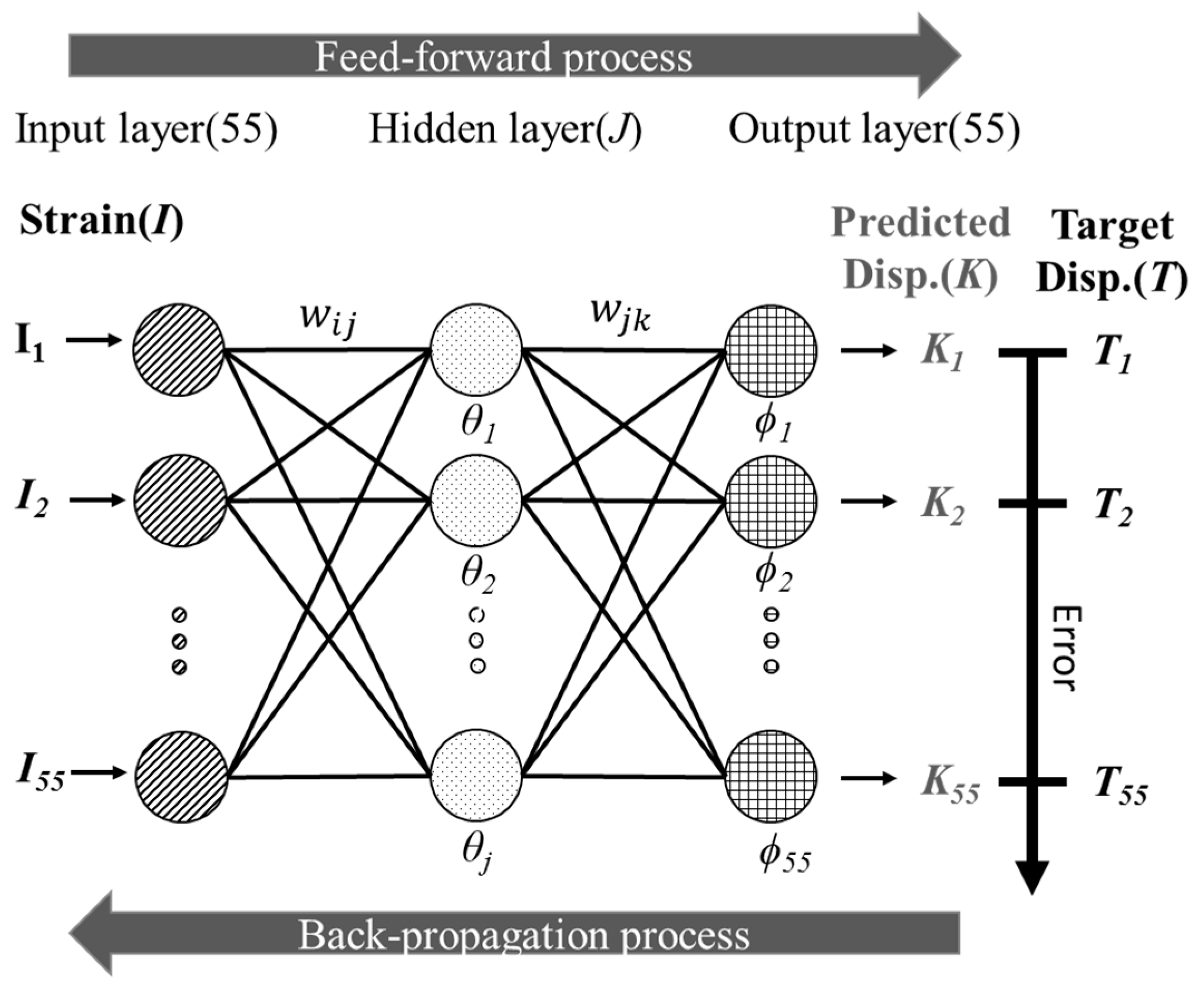
2.3. Multilayer Feedforward Neural Network (MFNN)
2.4. Modeling of MFNN
- The numbers of input layers and output layers are both fixed at one. Therefore, regarding the total number of layers, the number of hidden layers is the only variable. In general, as the number of hidden layers increases, the computational speed decreases proportionately, and the learning efficiency decreases because of the large amount of computer memory required. With consideration of these points, in this research, the case study was conducted with the number of hidden layers limited to two.
- The number of nodes in the input layer and the output layer is already determined because it is equal to the number of variables that are input and output, respectively, for the problem to be studied [54]. Therefore, the number of nodes in hidden layer is the only variable. There are no general rules for setting the number of hidden nodes [53]. The number of nodes proposed by Zhang et al. was used [55]. In their study, they proposed n/2, n, 2n, and 2n + 1 for the number of hidden nodes, where n is the number of input nodes. In this study, as the number of nodes in the input layer is 55, 28 (n/2), 55 (n), 110 (2n), and 111 (2n + 1) was used as the number of nodes in the hidden layer.
- The transfer function transforms the weighted sum of the input values to the output node and determines the strength of the output value [56]. Nalbant et al. [57] asserted that the transfer function is determined by the nature of the problem to be solved. In this study, a log-sigmoid function (logsig) was used for the hidden layer and a linear function (purelin) for the output layer, which is a commonly used transfer function [33].
- The training function determines the method of calculating the error of the predicted output value and adjusts the weight and bias. The training function is important because it can considerably affect the learning speed and accuracy [53]. The training function is affected by many factors, such as the nature of the problem, amount of data, and the number of weights. That is, even for a given function, the accuracy and the learning time may vary depending on the nature of the problem. In this study, a relatively large quantity of data (57,600) was used for learning. Therefore, trainscg was used as the learning function, which has relatively low memory consumption and low time consumption, as well as high accuracy when there are many data [58].
3. Results and Discussion
3.1. Training Results by ANN Structure
3.2. Test Results by ANN Structure
- The ANN trained using three different velocities predicts the displacement for different speed–load scenarios with remarkably high accuracy. This means that it is possible to predict the displacement of a bridge due to a vehicle moving at various velocities in the field.
- The ANN predicts the overall behavior of all the girders at a given point in time, as well as the change in dynamic displacement of a given point over time.
- The results provide that the proposed method to predict vertical dynamic displacements of bridge from longitudinal strains is feasible.
4. Conclusions and Future Work
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ribeiro, D.; Calçada, R.; Ferreira, J.; Martins, T. Non-contact measurement of the dynamic displacement of railway bridges using an advanced video-based system. Eng. Struct. 2014, 75, 164–180. [Google Scholar] [CrossRef]
- Park, S.W.; Park, H.S.; Kim, J.H.; Adeli, H. 3D displacement measurement model for health monitoring of structures using a motion capture system. Measurement 2015, 59, 352–362. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, H.; Yu, Y.; Xu, X.; Hu, W.; Li, M.; Ou, J. Bridge displacement monitoring method based on laser projection-sensing technology. Sensors 2015, 15, 8444–8463. [Google Scholar] [CrossRef] [PubMed]
- Feng, D.; Feng, M.Q. Vision-based multipoint displacement measurement for structural health monitoring. Struct. Control Health Monit. 2016, 23, 876–890. [Google Scholar] [CrossRef]
- Huang, Q.; Crosetto, M.; Monserrat, O.; Crippa, B. Displacement monitoring and modelling of a high-speed railway bridge using C-band Sentinel-1 data. ISPRS J. Photogramm. Remote Sens. 2017, 128, 204–211. [Google Scholar] [CrossRef]
- Sekiya, H.; Kimura, K.; Miki, C. Technique for determining bridge displacement response using MEMS accelerometers. Sensors 2016, 16, 257. [Google Scholar] [CrossRef] [PubMed]
- Vicente, M.A.; Gonzalez, D.C.; Minguez, J.; Schumacher, T. A novel laser and video-based displacement transducer to monitor bridge deflections. Sensors 2018, 18, 970. [Google Scholar] [CrossRef]
- Lee, J.J.; Cho, S.; Shinozuka, M.; Yun, C.-B.; Lee, C.-G.; Lee, W.-T. Evaluation of bridge load carrying capacity based on dynamic displacement measurement using real-time image processing techniques. Steel Struct. 2006, 6, 377–385. [Google Scholar]
- Lee, J.J.; Fukuda, Y.; Shinozuka, M.; Cho, S.; Yun, C.-B. Development and application of a vision-based displacement measurement system for structural health monitoring of civil structures. Smart Struct. Syst. 2007, 3, 373–384. [Google Scholar] [CrossRef]
- Olaszek, P. Investigation of the dynamic characteristics of bridge structures using a computer vision method. Measurement 1999, 25, 227–236. [Google Scholar] [CrossRef]
- Nakamura, S. GPS measurement of wind-induced suspension bridge girder displacements. J. Struct. Eng. 2000, 126, 1413–1419. [Google Scholar] [CrossRef]
- Brown, C.; Roertsm, G.; Meng, X. When bridges move: GPS-based deflection monitoring. Sensors 2006, 4, 16–19. [Google Scholar]
- Lee, J.; Shinozuka, M. A vision-based system for remote sensing of bridge displacement. Ndt E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Gomez-Lahoz, J.; Sanchez, J. A new approach for structural monitoring of large dams with a three-dimensional laser scanner. Sensors 2008, 8, 5866–5883. [Google Scholar] [CrossRef]
- Fukuda, Y.; Feng, M.; Shinosuka, M. Cost-effective vision-based system for monitoring dynamic response of civil engineering structures. Struct. Control Health Monit. 2009, 17, 918–936. [Google Scholar] [CrossRef]
- Park, J.W.; Lee, J.J.; Jung, H.J.; Myung, H. Vision-based displacement measurement method for high-rise building structures using partitioning approach. Ndt E Int. 2010, 43, 642–647. [Google Scholar] [CrossRef]
- Im, S.B.; Hurlebaus, S.; Kang, Y.J. Summary Review of GPS technology for structural health monitoring. J. Struct. Eng. 2013, 139, 1653–1664. [Google Scholar] [CrossRef]
- Kohut, P.; Holak, K.; Uhl, T.; Ortyl, L.; Owerko, T.; Kuras, P.; Kocierz, R. Monitoring of a civil structure’s state based on noncontact measurements. Struct. Health Monit. 2013, 12, 411–429. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Measuring deflections for a short-span railway bridge using a robotic total station. J. Bridge Eng. 2013, 18, 182–185. [Google Scholar] [CrossRef]
- Li, C.J.; Ulsoy, A.G. High-precision measurement of tool-tip displacement using strain gauges in precision flexible line boring. Mech. Syst. Signal. Proc. 1999, 13, 531–546. [Google Scholar] [CrossRef]
- Kang, L.H.; Kim, D.K.; Han, J.H. Estimation of dynamic structural displacements using fiber Bragg grating strains sensors. J. Sound. Vib. 2007, 305, 534–542. [Google Scholar] [CrossRef]
- Tommy, H.T.C.; Demeke, B.A.; Tam, H.Y. Vertical displacement measurements for bridges using optical fiber sensors and CCD cameras-a preliminary study. Struct. Health. Monit. 2009, 8, 243–249. [Google Scholar]
- Wang, Z.C.; Geng, D.; Ren, W.X. Strain modes based dynamic displacement estimation of beam structures with strain sensors. Smart. Mater. Struct. 2014, 23, 125045. [Google Scholar] [CrossRef]
- Xia, Y.; Zhang, P.; Ni, Y.Q. Deformation monitoring of a super-tall structure using real-time strain data. Eng. Struct. 2014, 67, 29–38. [Google Scholar] [CrossRef]
- Xu, H.; Ren, W.X.; Wang, Z.C. Deflection estimation of bending beam structures using fiber Bragg grating strain sensors. Adv. Struct. Eng. 2015, 18, 395–404. [Google Scholar] [CrossRef]
- Cho, S.; Yun, C.B.; Sim, S.H. Displacement estimation of bridge structure using data fusion of acceleration and strain measurement incorporating finite element model. Smart. Struct. Syst. 2015, 15, 645–663. [Google Scholar] [CrossRef]
- Chandwani, V.; Agrawal, V.; Nagar, R. Modeling slump of ready mix concrete using genetic algorithms assisted training of Artificial Neural Networks. Expert Syst. Appl. 2015, 42, 885–893. [Google Scholar] [CrossRef]
- Hamzehie, M.E.; Mazinani, S.; Davardoost, F.; Mokhtare, A.; Najibi, H.; Van der Bruggen, B.; Darvishmanesh, S. Developing a feed forward multilayer neural network model for prediction of CO2 solubility in blended aqueous amine solutions. J. Nat. Gas Sci. Eng. 2014, 21, 19–25. [Google Scholar] [CrossRef]
- Hemmat Esfe, M.; Hassani Ahangar, M.R.; Rejvani, M.; Toghraie, D.; Hajmohammad, M.H. Designing an artificial neural network to predict dynamic viscosity of aqueous nanofluid of TiO2 using experimental data. Int. Commun. Heat Mass Transf. 2016, 75, 192–196. [Google Scholar] [CrossRef]
- Ostad-Ali-Askari, K.; Shayannejad, M.; Ghorbanizadeh-Kharazi, H. Artificial neural network for modeling nitrate pollution of groundwater in marginal area of Zayandeh-rood River, Isfahan, Iran. KSCE J. Civ. Eng. 2017, 21, 134–140. [Google Scholar] [CrossRef]
- Ramasamy, P.; Chandel, S.S.; Yadav, A.K. Wind speed prediction in the mountainous region of India using an artificial neural network model. Renew. Energy 2015, 80, 338–347. [Google Scholar] [CrossRef]
- Yadav, A.K.; Chandel, S.S. Solar radiation prediction using Artificial Neural Network techniques: A review. Renew. Sustain. Energy Rev. 2014, 33, 772–781. [Google Scholar] [CrossRef]
- Yan, F.; Lin, L.; Wang, X.; Azarmi, F.; Sobolev, K. Evaluation and prediction of bond strength of GFRP-bar reinforced concrete using artificial neural network optimized with genetic algorithm. Compos. Struct. 2017, 161, 441–452. [Google Scholar] [CrossRef]
- Zain, A.M.; Haron, H.; Sharif, S. Prediction of surface roughness in the end milling machining using Artificial Neural Network. Expert Syst. Appl. 2010, 37, 1755–1768. [Google Scholar] [CrossRef]
- Elsheikh, A.H.; Showaib, E.A.; Asar, A.E.M. Artificial neural network based forward kinematics solution for planar parallel manipulators passing through singular configuration. Adv. Robot. Autom. 2013, 2, 2. [Google Scholar]
- Karabacak, K.; Cetin, N. Artificial neural networks for controlling wind-PV power systems: A review. Renew. Sustain. Energy Rev. 2014, 29, 804–827. [Google Scholar] [CrossRef]
- Kashyap, Y.; Bansal, A.; Sao, A.K. Solar radiation forecasting with multiple parameters neural networks. Renew. Sustain. Energy Rev. 2015, 49, 825–835. [Google Scholar] [CrossRef]
- Siami-Irdemoosa, E.; Dindarloo, S.R. Prediction of fuel consumption of mining dump trucks: A neural networks approach. Appl. Energy 2015, 151, 77–84. [Google Scholar] [CrossRef]
- Jani, D.B.; Mishra, M.; Sahoo, P.K. Application of artificial neural network for predicting performance of solid desiccant cooling system—A review. Renew. Sustain. Energy Rev. 2017, 80, 352–366. [Google Scholar] [CrossRef]
- Elsheikh, A.H.; Sharshir, S.W.; Elaziz, M.A.; Kabeel, A.E.; Guilan, W.; Haiou, Z. Modeling of solar energy systems using artificial neural network: A comprehensive review. Solar Energy 2019, 180, 622–639. [Google Scholar] [CrossRef]
- Chun, B.-J. Skewed Bridge Behaviors: Experimental, Analytical, and Numerical Analysis. Doctoral Dissertation, Wayne State University, Detroit, MI, USA, 2010. [Google Scholar]
- Ok, S.Y. A Study on Estimation Method of Dynamic Bridge Displacement by Using Artificial Neural Network. Master’s Thesis, Yonsei University, Seoul, Korea, 2012. [Google Scholar]
- Ok, S.Y.; Moon, H.S.; Chun, P.-J.; Lim, Y.M. Estimation of dynamic vertical displacement using artificial neural network and axial strain in girder bridge. J. Korean Soc. Civ. Eng. 2014, 34, 1655–1665. [Google Scholar] [CrossRef]
- Chiara, B.; Marco, F. Reliability of Field Experiments, Analytical Methods and Pedestrian’s Perception Scales for the Vibration Serviceability Assessment of an In-Service Glass Walkway. Appl. Sci. 2019, 9, 1936. [Google Scholar] [CrossRef]
- Zuo, L.; Nayfeh, S.A. Structured H2 optimization of vehicle suspensions based on multi-wheel models. Veh. Syst. Dyn. 2003, 40, 351–371. [Google Scholar] [CrossRef]
- Ahmed, K.A.; Abdelhady, M.B.A.; Abouelnour, A.M.A.A. The improvement of ride comfort of a city bus which is fabricated on a lorry chassis. Eng. Res. J. 1997, 53, 19–35. [Google Scholar]
- Li, H. Dynamic Response of Highway Bridges Subjected to Heavy Vehicles. Doctoral Dissertation, Florida State University, Tallahassee, FL, USA, 2005. [Google Scholar]
- Mathew, T.V. Vehicle arrival models: Headway. In Transportation Systems Engineering; Indian Institute of Technology: Bombay, India, 2014. [Google Scholar]
- May, A.D. Traffic Flow Fundamentals; Prentice Hall: Englewood Cliffs, NJ, USA, 1990. [Google Scholar]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Rezaei, M.; Rajabi, M. Vertical displacement estimation in roof and floor of an underground powerhouse cavern. Eng. Fail. Anal. 2018, 90, 290–309. [Google Scholar] [CrossRef]
- Jha, R.; Rower, J. Experimental investigation of active vibration control using neural networks and piezoelectric actuators. Smart Mater. Struct. 2002, 11, 115–121. [Google Scholar] [CrossRef]
- Benardos, P.G.; Vosniakos, P.-G. Optimizing feedforward artificial neural network architecture. Eng. Appl. Artif. Intell. 2007, 20, 365–382. [Google Scholar] [CrossRef]
- Khoshjavan, S.; Mazlumi, M.; Rezai, B.; Rezai, M. Estimation of hardgrove grindability index (HGI) based on the coal chemical properties using artificial neural networks. Orient. J. Chem. 2010, 26, 1271–1280. [Google Scholar]
- Zhang, G.; Patuwo, B.E.; Hu, M.Y. Forecasting with artificial neural networks: The state of the art. Int. J. Forecast. 1998, 14, 35–62. [Google Scholar] [CrossRef]
- Basheer, I.A.; Hajmeer, M. Artificial neural networks: Fundamentals, computing, design, and application. J. Microbiol. Methods 2000, 43, 3–31. [Google Scholar] [CrossRef]
- Nalbant, M.; Gökkaya, H.; Toktaş, I.; Sur, G. The experimental investigation of the effects of uncoated, PVD- and CVD-coated cemented carbide inserts and cutting parameters on surface roughness in CNC turning and its prediction using artificial neural networks. Robot. Comput. Integr. Manuf. 2009, 25, 211–223. [Google Scholar] [CrossRef]
- Beale, M.H.; Hagan, M.T.; Demuth, H.B. Deep learning toolbox. In R2018b User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2018. [Google Scholar]
- Ding, S.; Su, C.; Yu, J. An optimizing BP neural network algorithm based on genetic algorithm. Artif. Intell. Rev. 2011, 36, 153–162. [Google Scholar] [CrossRef]
- Karul, C.; Soyupak, S.; Çilesiz, A.F.; Akbay, N.; Germen, E. Case studies on the use of neural networks in eutrophication modeling. Ecol. Model. 2000, 134, 145–152. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cars (%) | Buses (%) | Trucks (%) | Total | |
|---|---|---|---|---|
| Lane 1 | 248 (91.51) | 17 (6.27) | 6 (2.22) | 271 |
| Lane 2 | 350 (92.59) | 27 (7.14) | 1 (0.27) | 378 |
| Lane 3 | 223 (84.47) | 41 (15.53) | 0 (0) | 264 |
| Lane 4 | 174 (94.05) | 7 (3.78) | 4 (2.17) | 185 |
| Training Data | Test Data | |||||
|---|---|---|---|---|---|---|
| 40 km/h | 60 km/h | 80 km/h | 40 km/h | 60 km/h | 80 km/h | |
| Number of load scenarios | 24 | 24 | 24 | 1 | 1 | 1 |
| Number of data sets per scenario | 800 | 800 | 800 | 800 | 800 | 800 |
| Total number of data sets | 24 800 3 = 57,600 | 1 800 3 = 2400 | ||||
| Girder | Training Data | Test Data | |||
|---|---|---|---|---|---|
| Min. | Max. | Min. | Max. | ||
| Longitudinal Strain (=input) | S2 | −1.9485 × 10−5 | 20.1969 × 10−5 | −4.1586 × 10−6 | 4.0053 × 10−5 |
| S1 | −1.4692 × 10−5 | 12.5891 × 10−5 | −4.3175 × 10−6 | 5.3966 × 10−5 | |
| CG | −0.7784 × 10−5 | 9.0571 × 10−5 | −4.7890 × 10−6 | 4.3134 × 10−5 | |
| N1 | −0.7014 × 10−5 | 9.5812 × 10−5 | −2.9181 × 10−6 | 2.5414 × 10−5 | |
| N2 | −2.6651 × 10−5 | 16.3720 × 10−5 | −3.4250 × 10−6 | 1.5924 × 10−5 | |
| Vertical Displacement (=output, unit: mm) | S2 | −16.0033 | 1.0827 | −3.4275 | 0.4020 |
| S1 | −10.2574 | 0.5583 | −3.4660 | 0.2214 | |
| CG | −6.6549 | 0.4138 | −2.9460 | 0.2268 | |
| N1 | −7.8640 | 0.5330 | −2.1045 | 0.2295 | |
| N2 | −12.0705 | 2.4387 | −1.2924 | 0.2450 | |
| Number of input nodes (strain values) | 55 |
| Number of hidden layers | 1 or 2 |
| Number of hidden nodes | 28, 55, 110, or 111 |
| Number of output nodes (displacement values) | 55 |
| Number of training data | 57,600 |
| Number of test data | 2400 (800 + 800 + 800) |
| Training algorithm | Scaled conjugate gradient backpropagation |
| Transfer function | Logsig (hidden), Purelin (output) |
| Learning rate | 0.01 |
| Momentum | 0.9 |
| Case | No. of Hidden Layers | ANN Structure | Training Performance | Training Time (s) | |
|---|---|---|---|---|---|
| MSE (×10−3) | R | ||||
| 1 | 1 | 55-28-55 | 1.31 | 0.998728 | 840.30 |
| 2 | 55-55-55 | 1.20 | 0.998829 | 1566.92 | |
| 3 | 55-110-55 | 1.10 | 0.998927 | 3403.87 | |
| 4 | 55-111-55 | 1.10 | 0.998928 | 3440.74 | |
| 5 | 2 | 55-28-28-55 | 1.83 | 0.998225 | 997.67 |
| 6 | 55-55-55-55 | 1.48 | 0.998556 | 3544.24 | |
| 7 | 55-110-110-55 | 1.28 | 0.998753 | 16,852.07 | |
| 8 | 55-111-111-55 | 1.30 | 0.998734 | 15,442.72 | |
| Case | No. of Hidden Layers | ANN Structure | Velocity of Vehicles Crossing Bridge (Test) | |||||
|---|---|---|---|---|---|---|---|---|
| 40 km/h | 60 km/h | 80 km/h | ||||||
| MSE (×10−3) | R | MSE (×10−3) | R | MSE (×10−3) | R | |||
| 1 | 1 | 55-28-55 | 0.70 | 0.995533 | 0.37 | 0.996351 | 0.44 | 0.993415 |
| 2 | 55-55-55 | 0.68 | 0.995636 | 0.35 | 0.996528 | 0.43 | 0.993614 | |
| 3 | 55-110-55 | 0.67 | 0.995699 | 0.34 | 0.996641 | 0.42 | 0.993773 | |
| 4 | 55-111-55 | 0.67 | 0.995705 | 0.34 | 0.996645 | 0.42 | 0.993755 | |
| 5 | 2 | 55-28-28-55 | 0.77 | 0.995058 | 0.45 | 0.995594 | 0.50 | 0.992507 |
| 6 | 55-55-55-55 | 0.74 | 0.995256 | 0.41 | 0.995997 | 0.46 | 0.993179 | |
| 7 | 55-110-110-55 | 0.70 | 0.995498 | 0.38 | 0.996296 | 0.44 | 0.993502 | |
| 8 | 55-111-111-55 | 0.70 | 0.995519 | 0.38 | 0.996282 | 0.44 | 0.993464 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, H.S.; Ok, S.; Chun, P.-j.; Lim, Y.M. Artificial Neural Network for Vertical Displacement Prediction of a Bridge from Strains (Part 1): Girder Bridge under Moving Vehicles. Appl. Sci. 2019, 9, 2881. https://doi.org/10.3390/app9142881
Moon HS, Ok S, Chun P-j, Lim YM. Artificial Neural Network for Vertical Displacement Prediction of a Bridge from Strains (Part 1): Girder Bridge under Moving Vehicles. Applied Sciences. 2019; 9(14):2881. https://doi.org/10.3390/app9142881
Chicago/Turabian StyleMoon, Hyun Su, Suyeol Ok, Pang-jo Chun, and Yun Mook Lim. 2019. "Artificial Neural Network for Vertical Displacement Prediction of a Bridge from Strains (Part 1): Girder Bridge under Moving Vehicles" Applied Sciences 9, no. 14: 2881. https://doi.org/10.3390/app9142881
APA StyleMoon, H. S., Ok, S., Chun, P.-j., & Lim, Y. M. (2019). Artificial Neural Network for Vertical Displacement Prediction of a Bridge from Strains (Part 1): Girder Bridge under Moving Vehicles. Applied Sciences, 9(14), 2881. https://doi.org/10.3390/app9142881