Wake Flow Characteristics over an Articulated Lorry Model with/without AC-DBD Plasma Actuation




Abstract
:1. Introduction
2. Experimental Setup
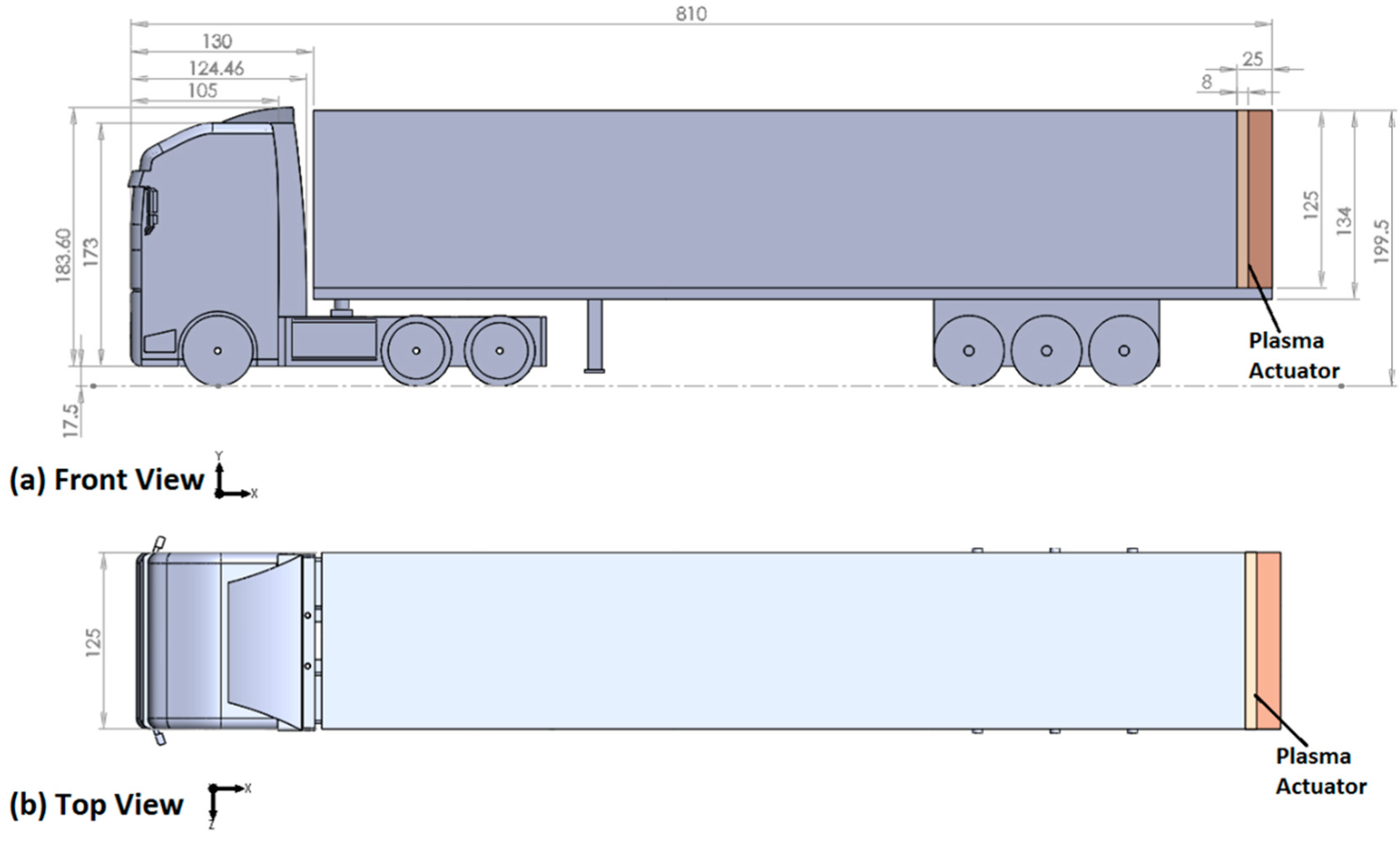
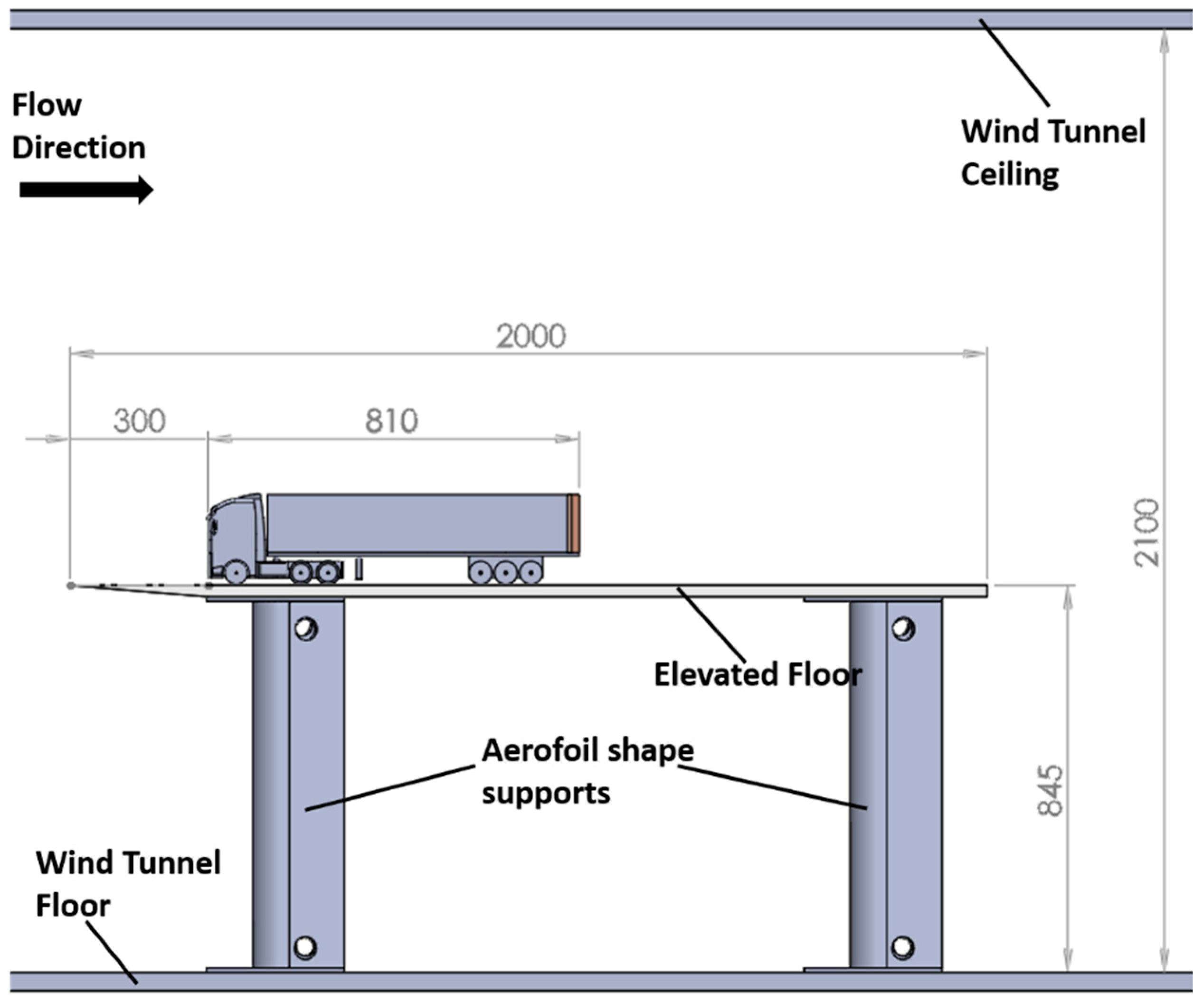
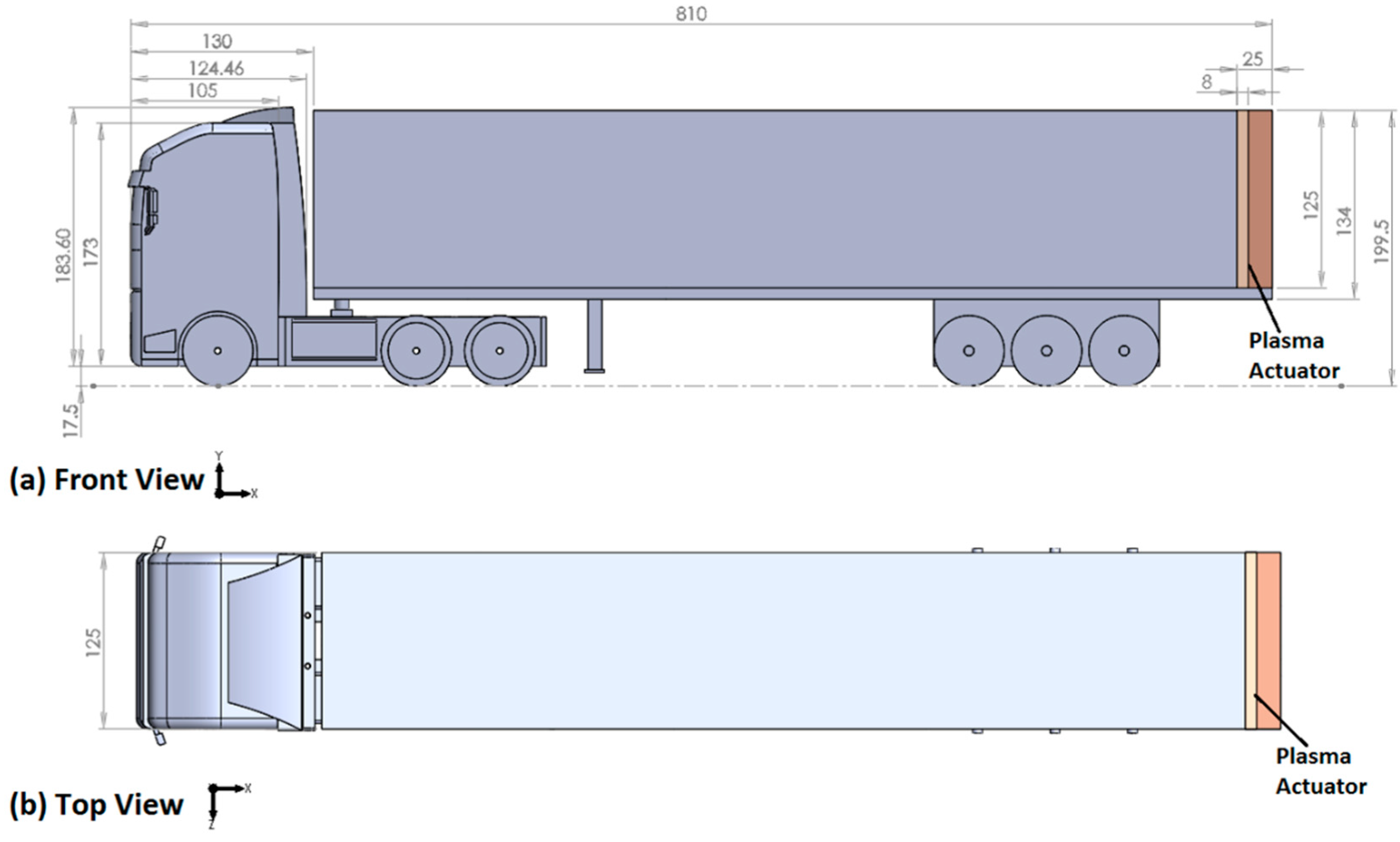
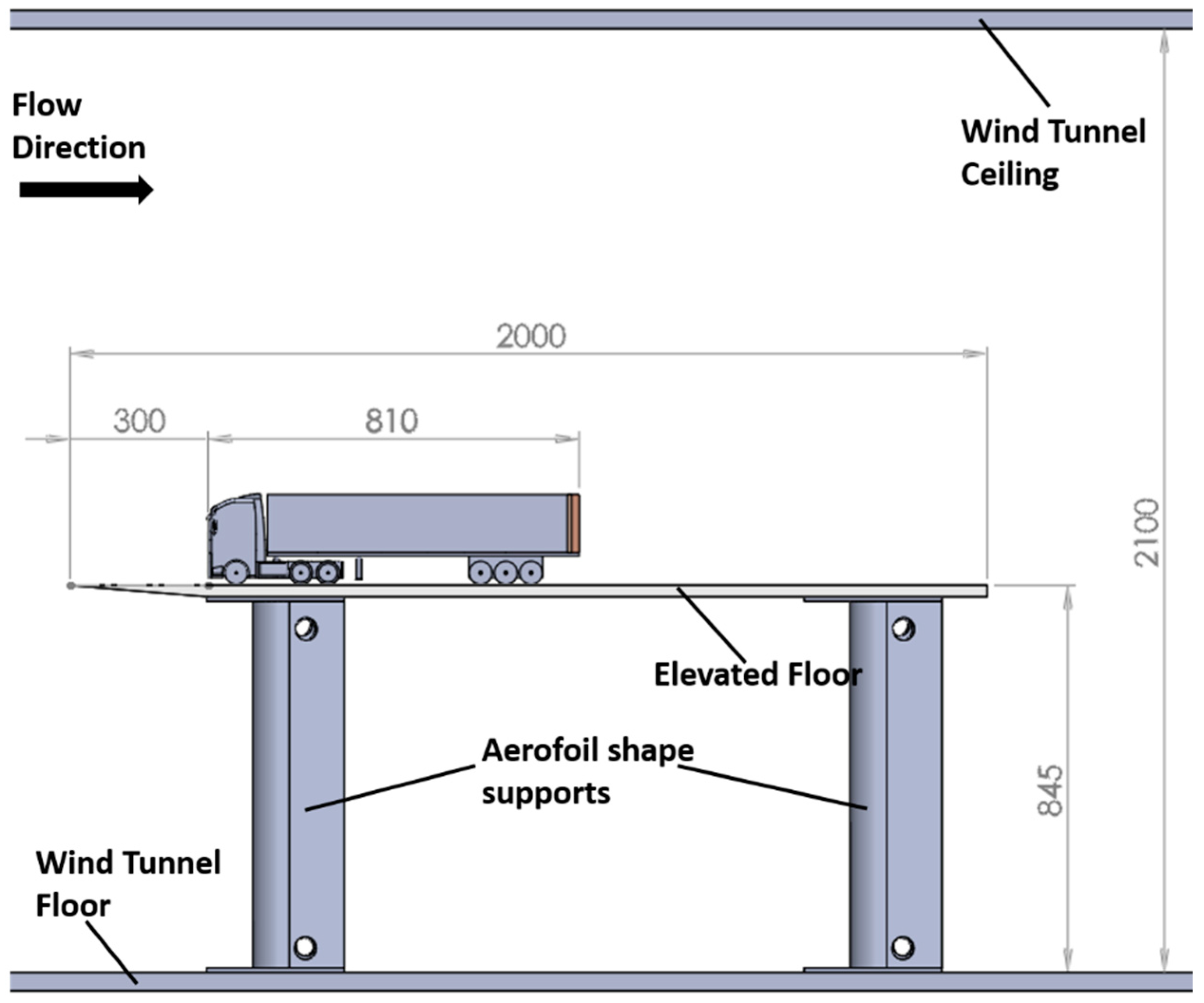
2.1. Scale Model
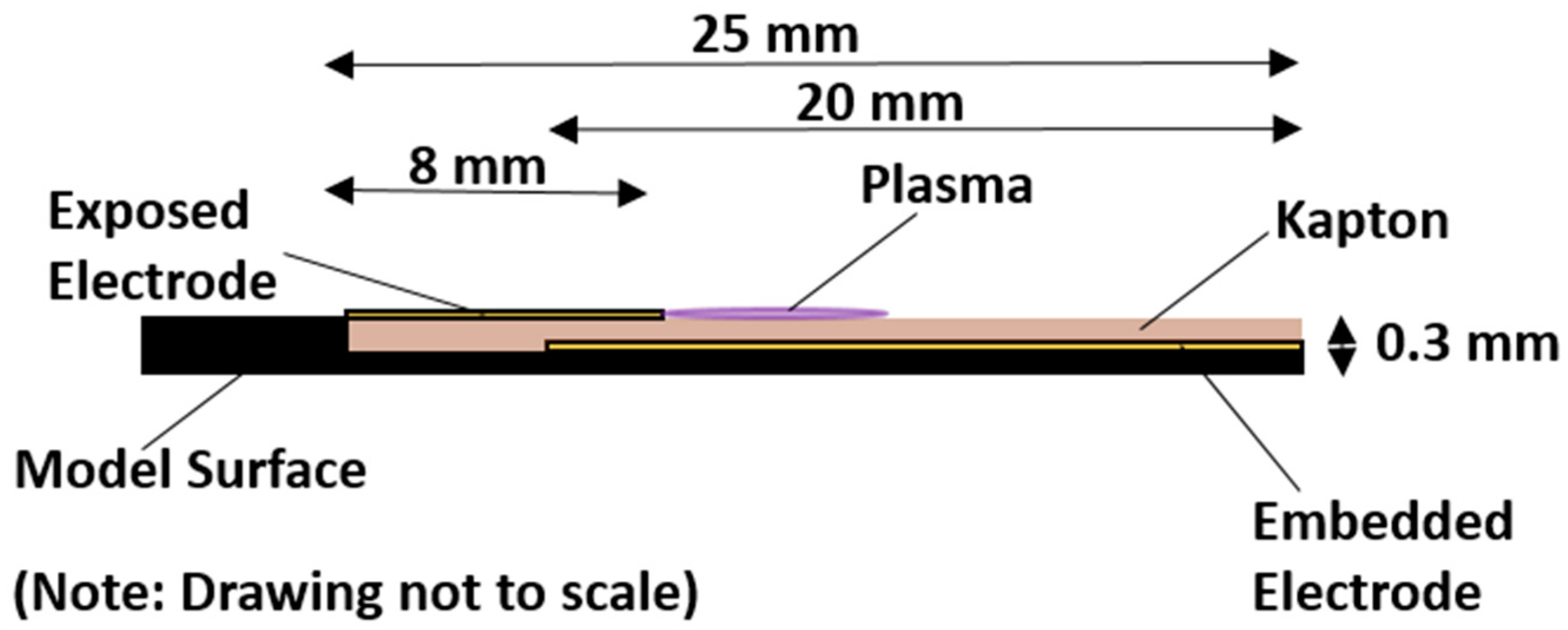
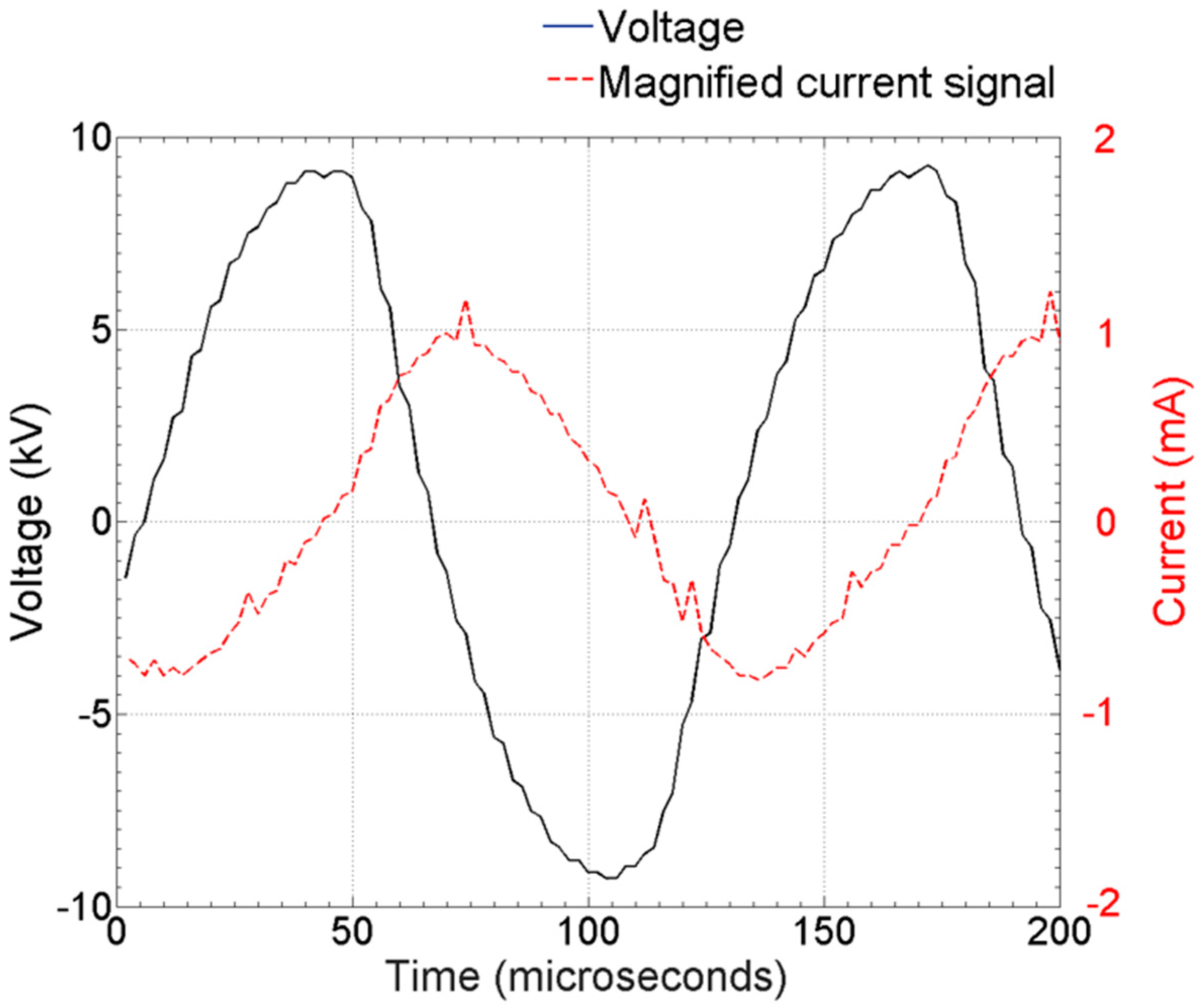
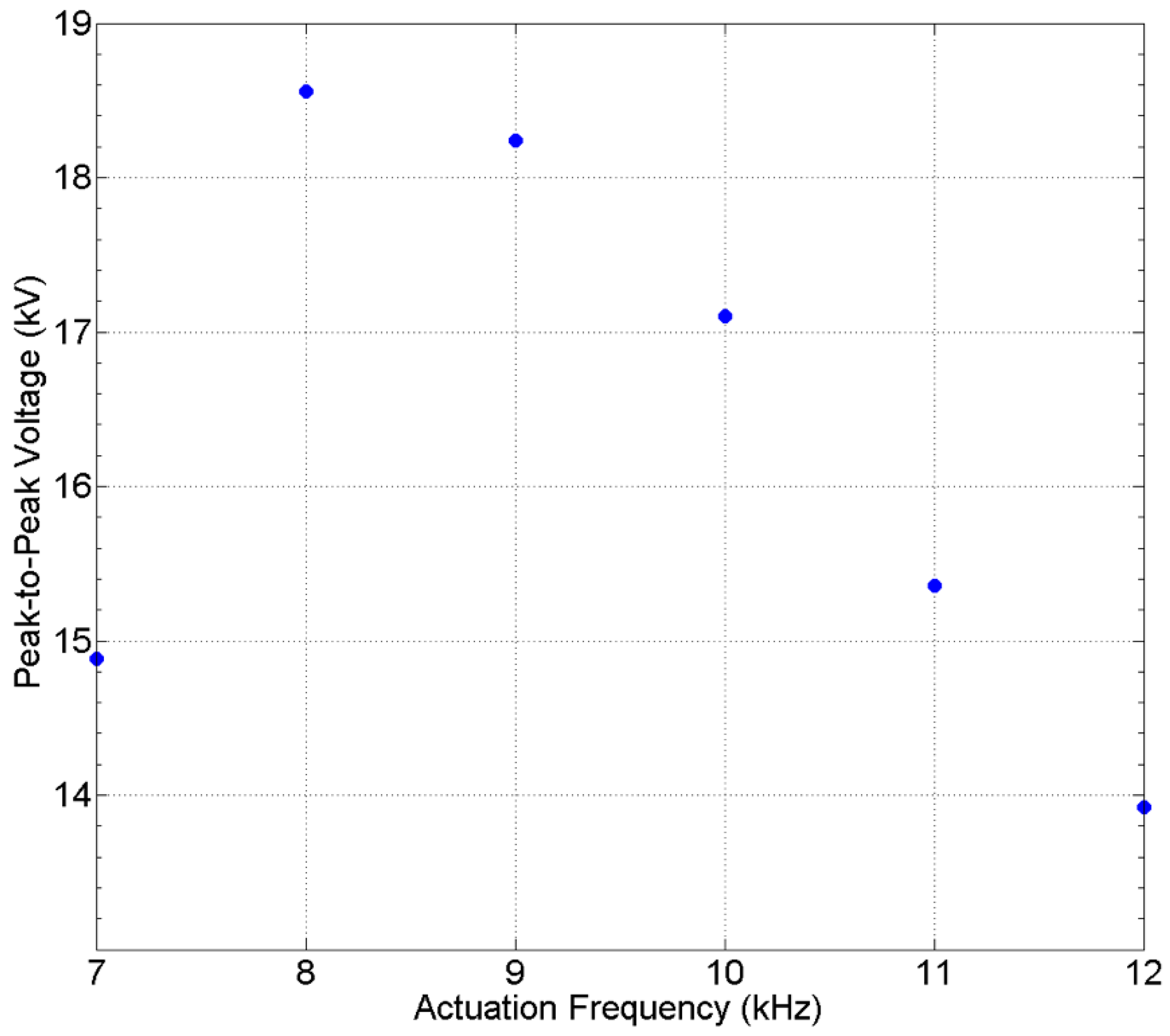
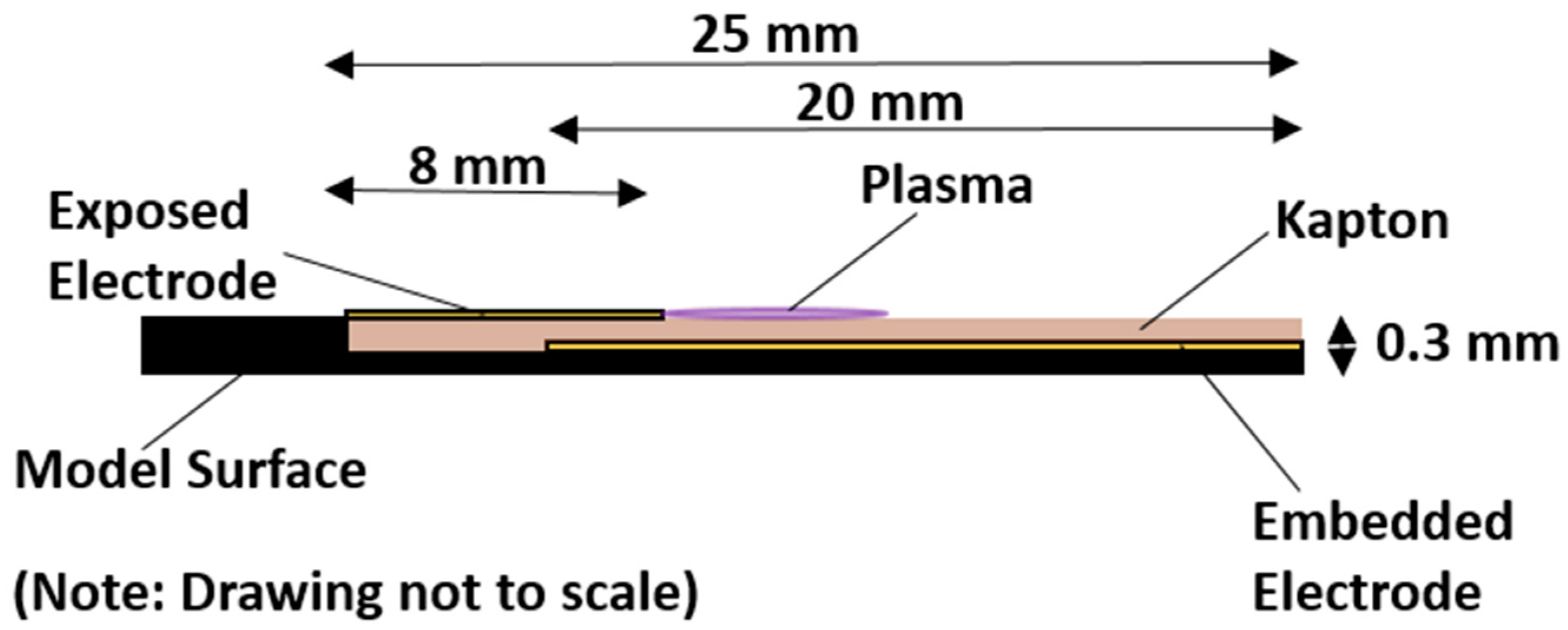
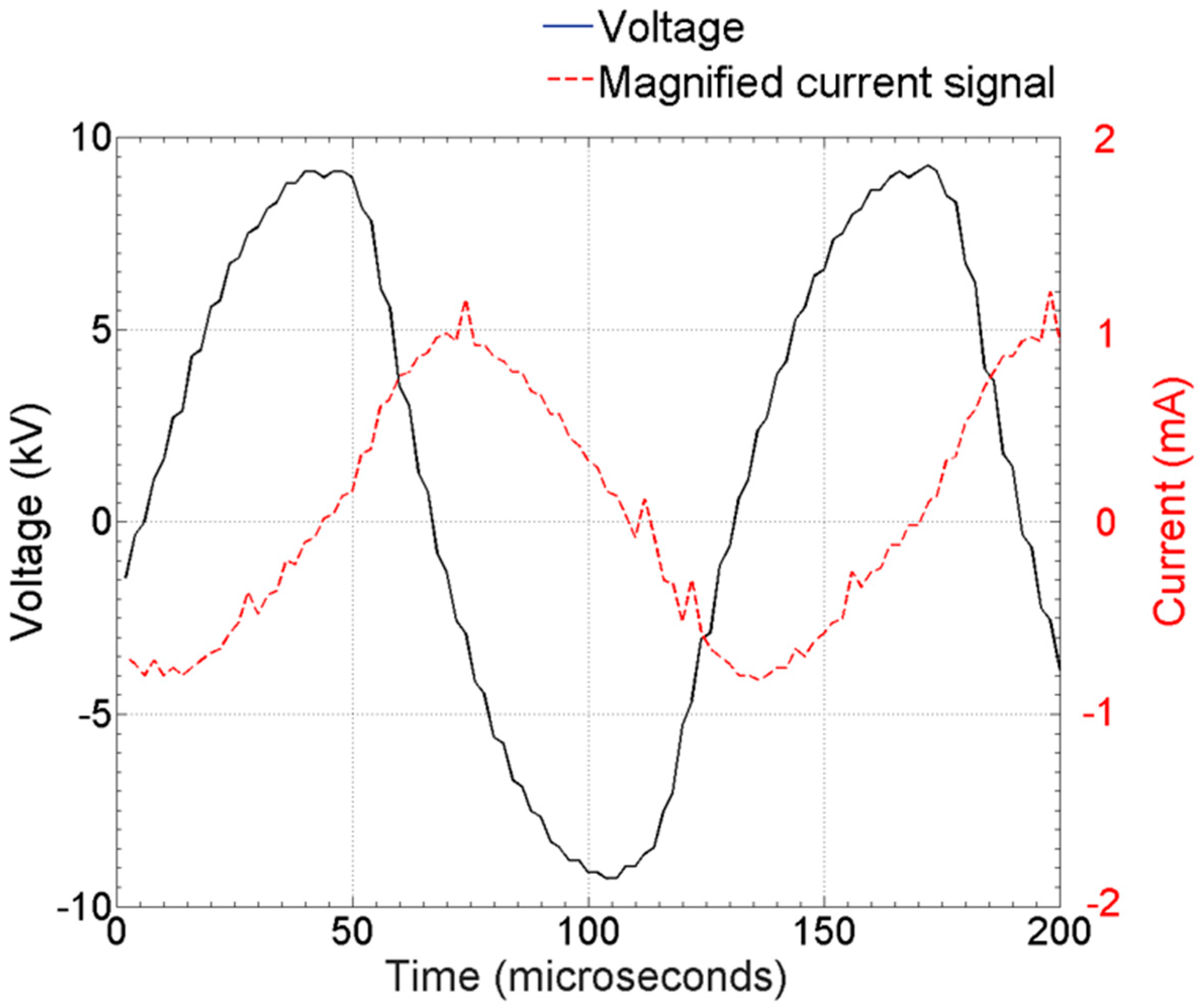
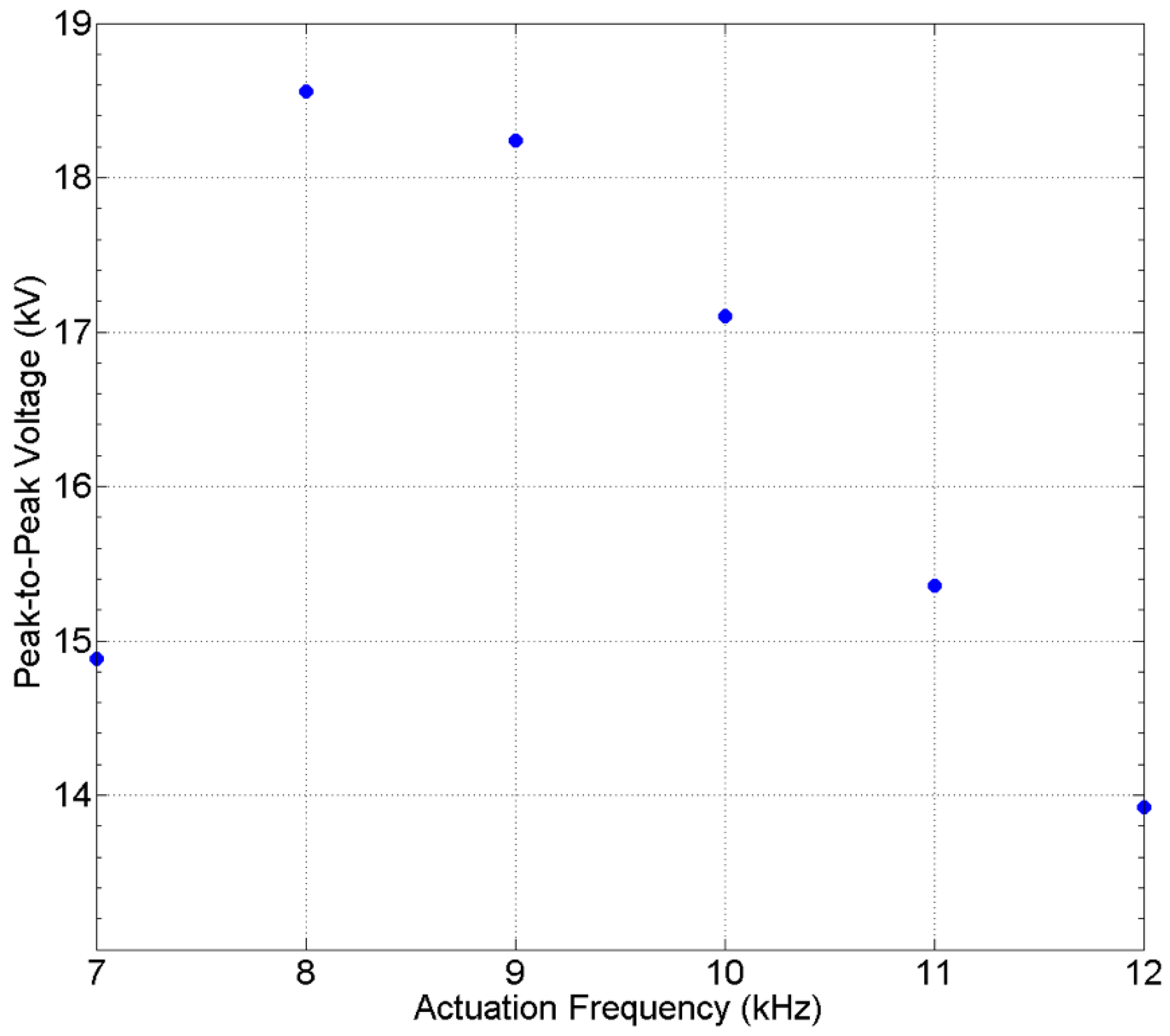
2.2. AC-DBD Plasma Actuator
2.3. Wind Tunnel Tests
2.4. Force Balance Measurement
2.5. Two-Component Particle Image Velocimetry Measurements
3. Results and Discussion
3.1. Wind-Off Performance
3.2. Flow Control Effect by AC-DBD Plasma Actuation
3.2.1. Force Balance Data
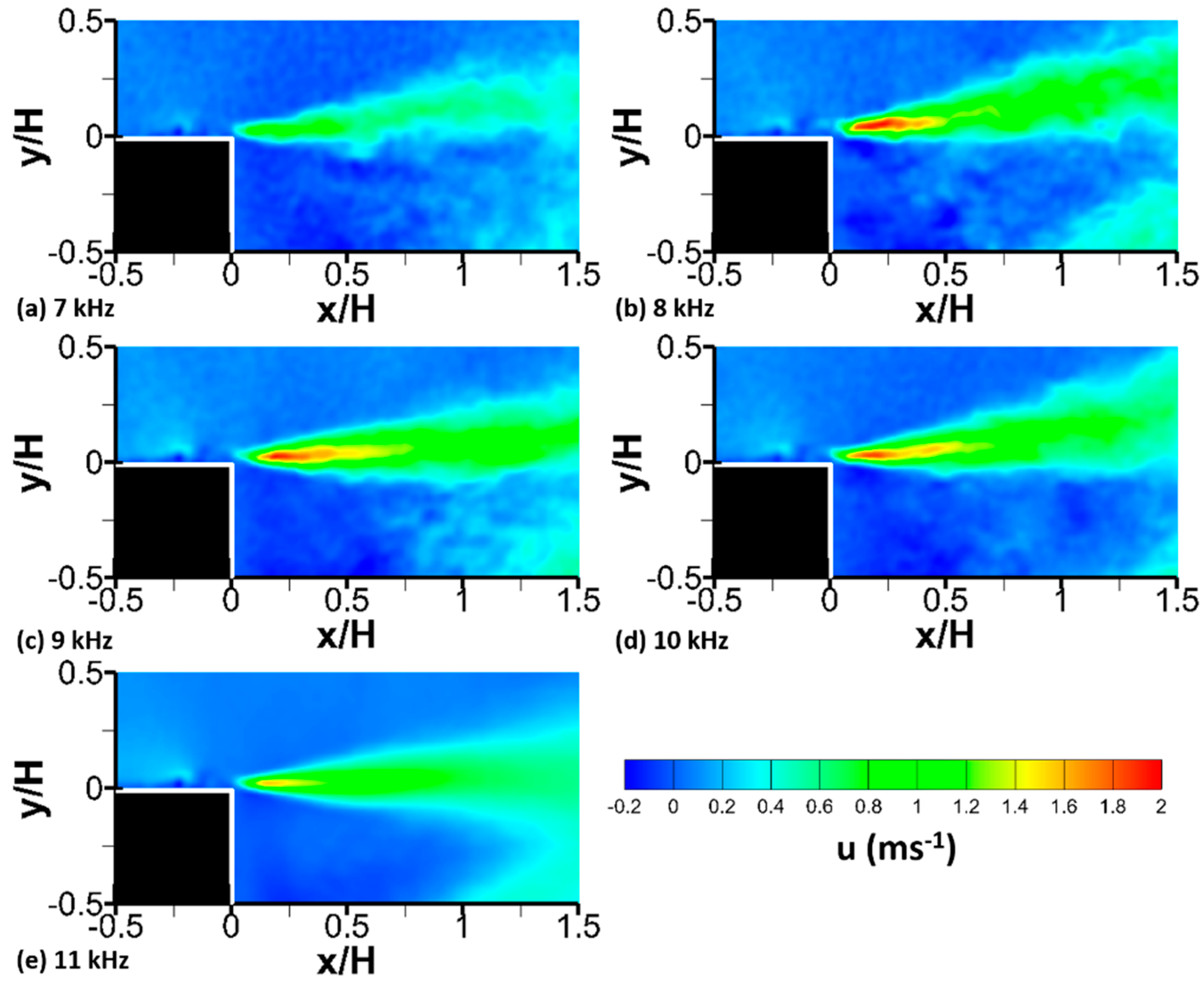
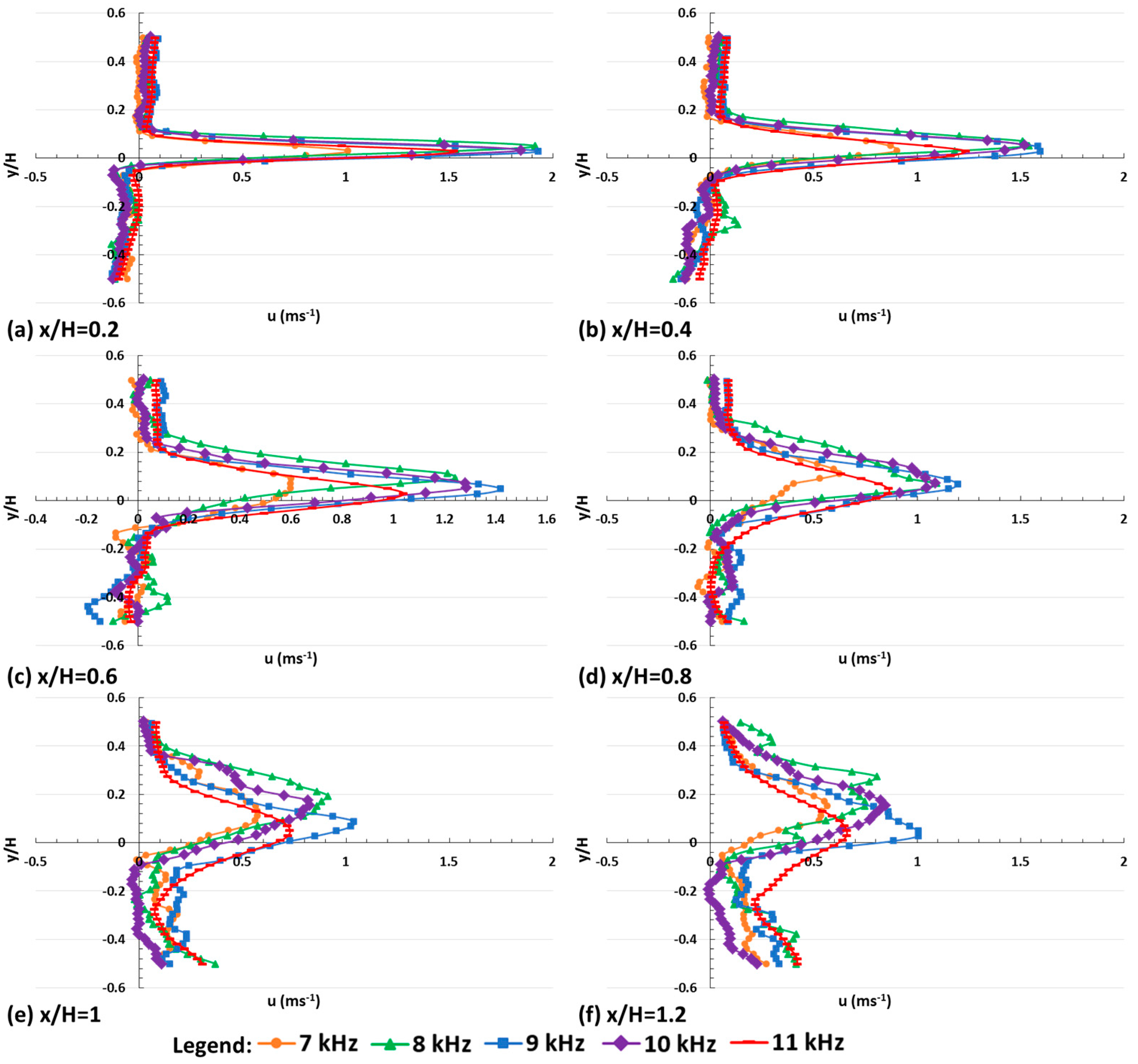
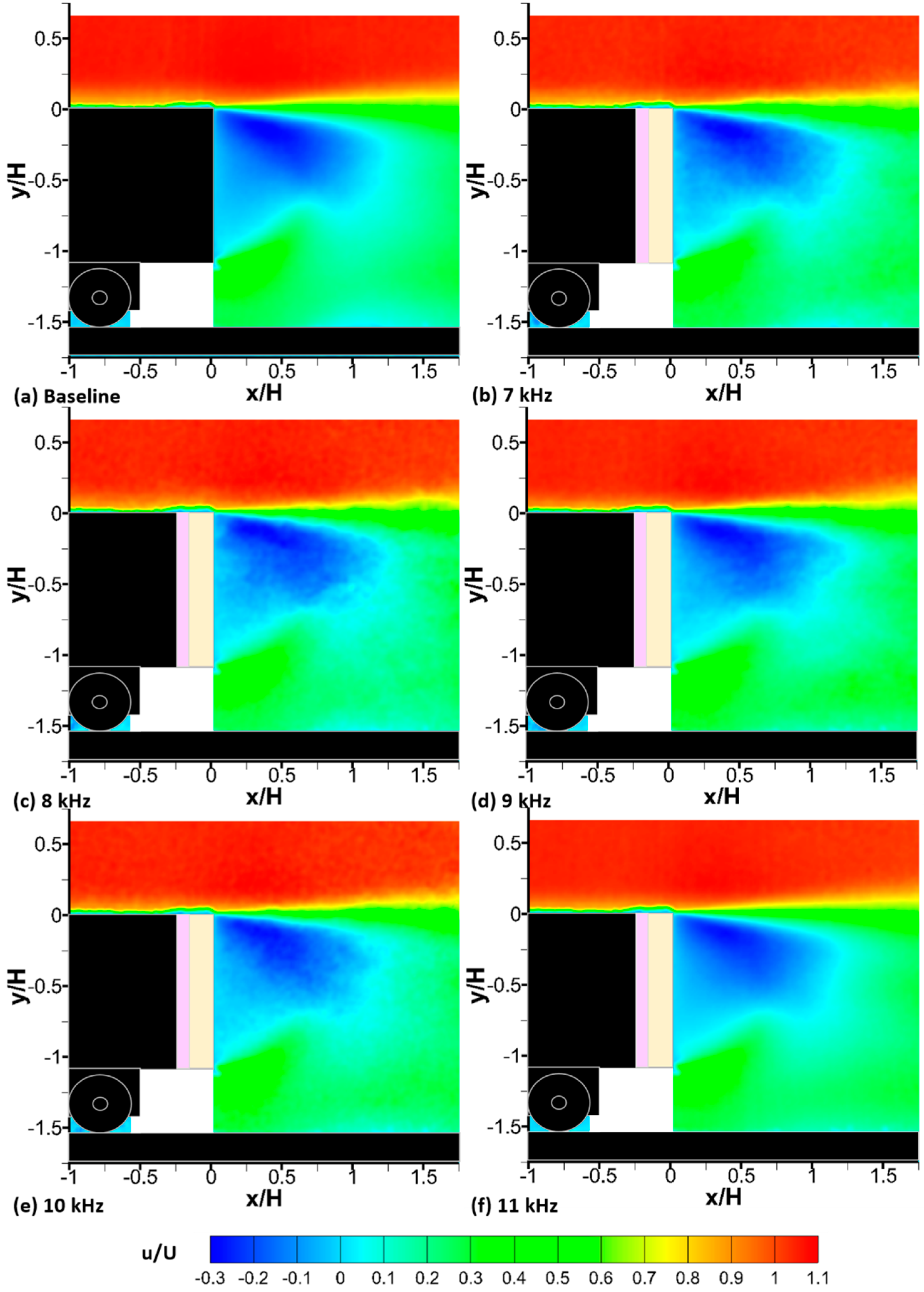
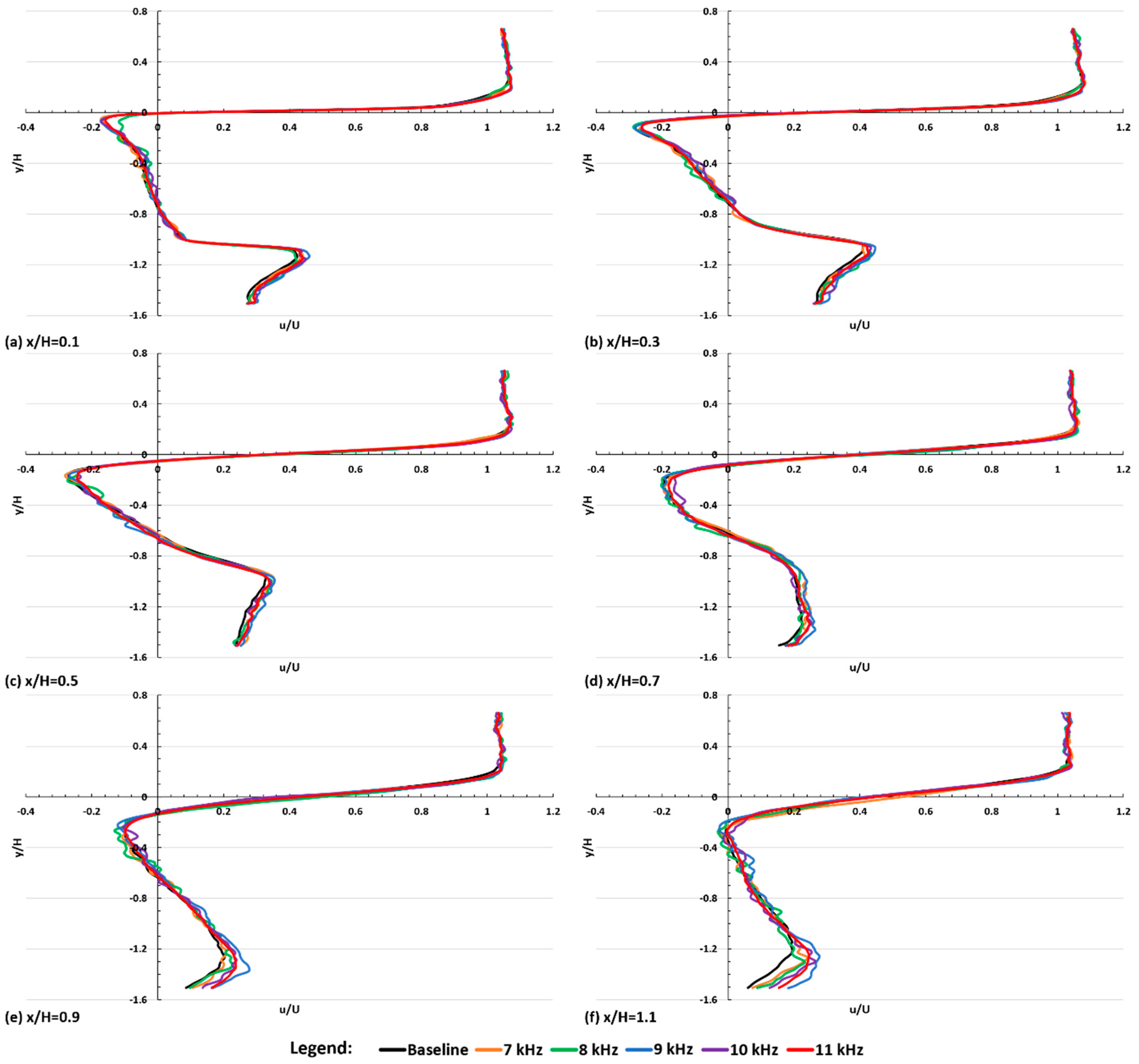
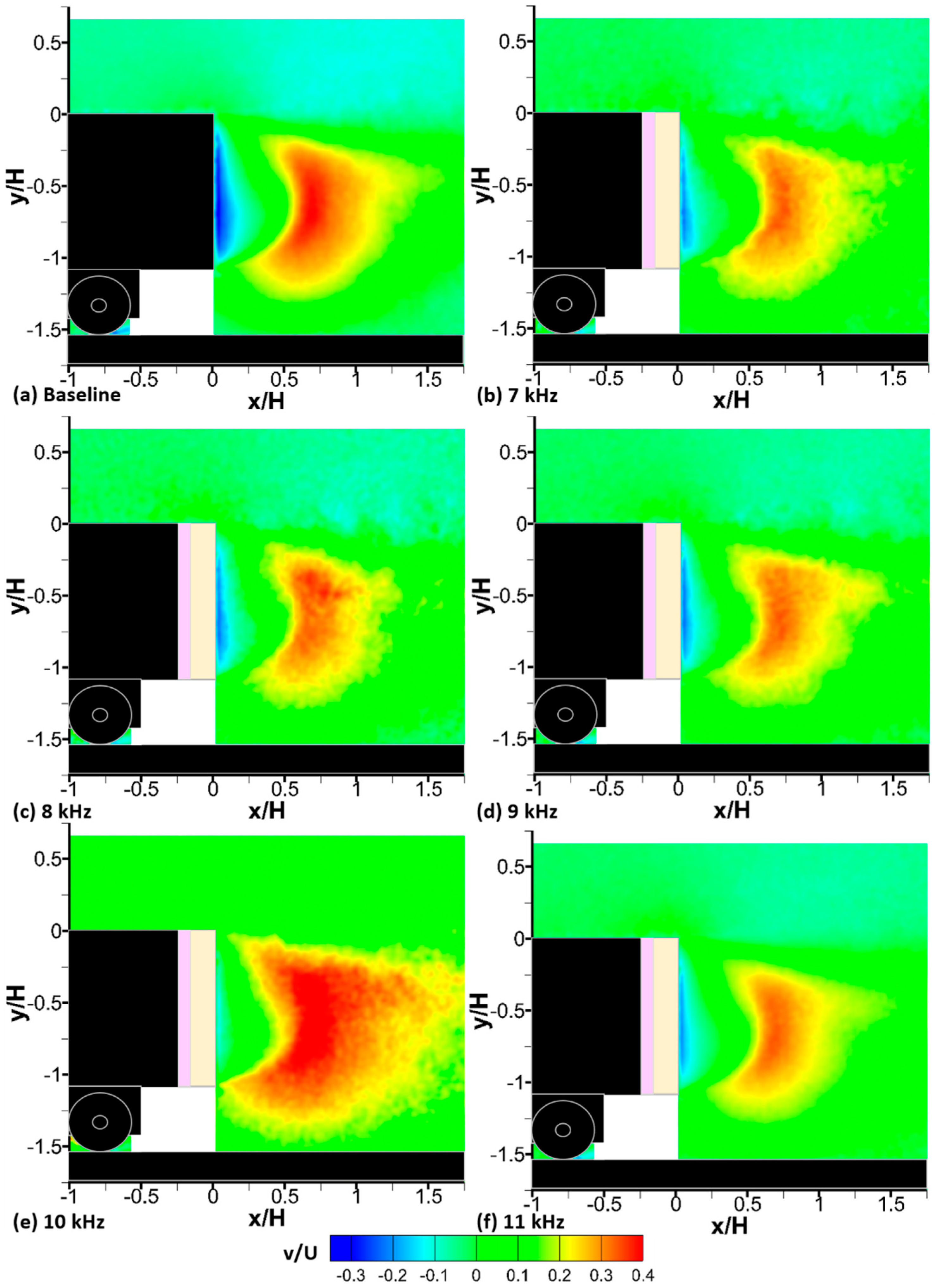
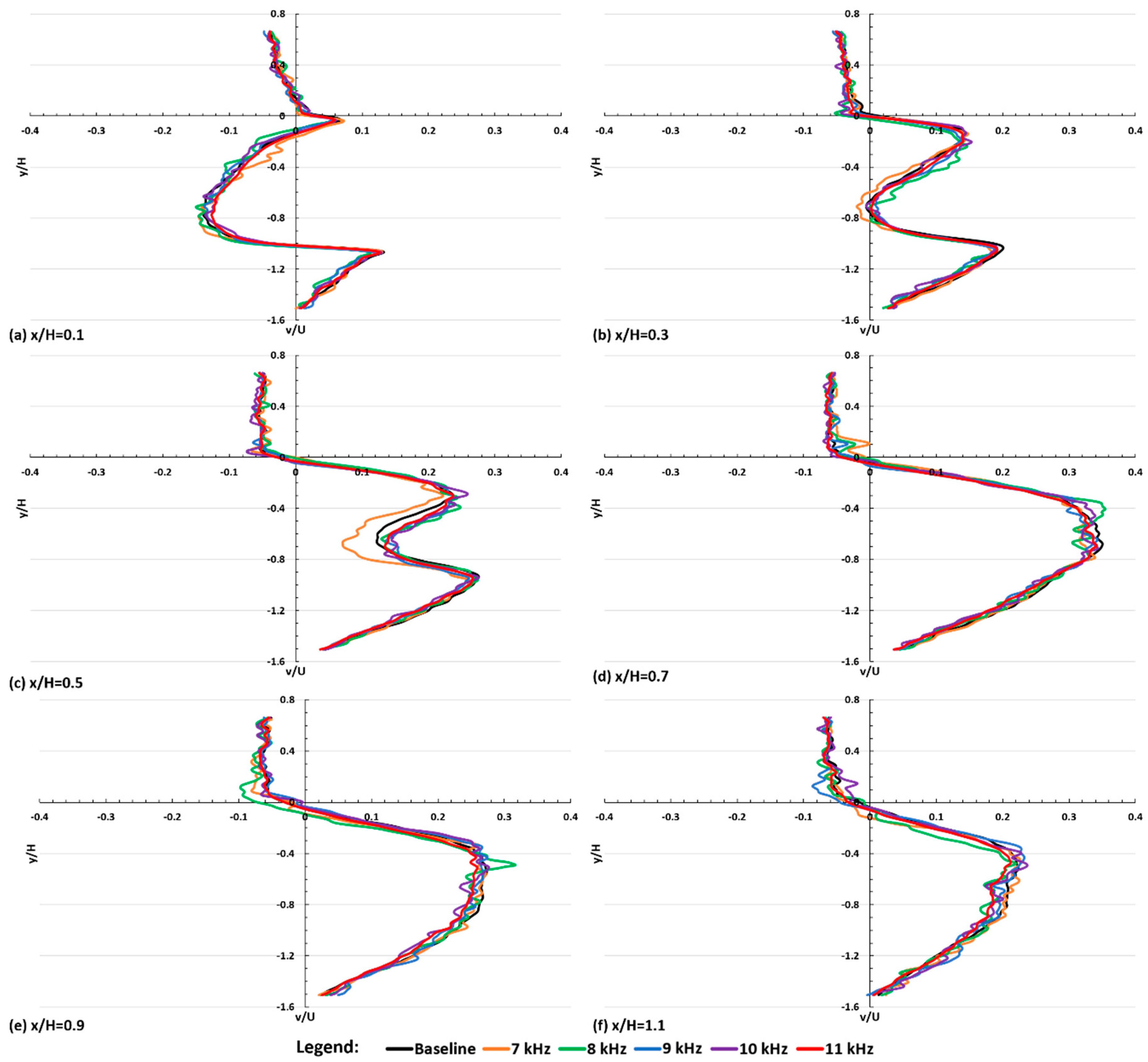
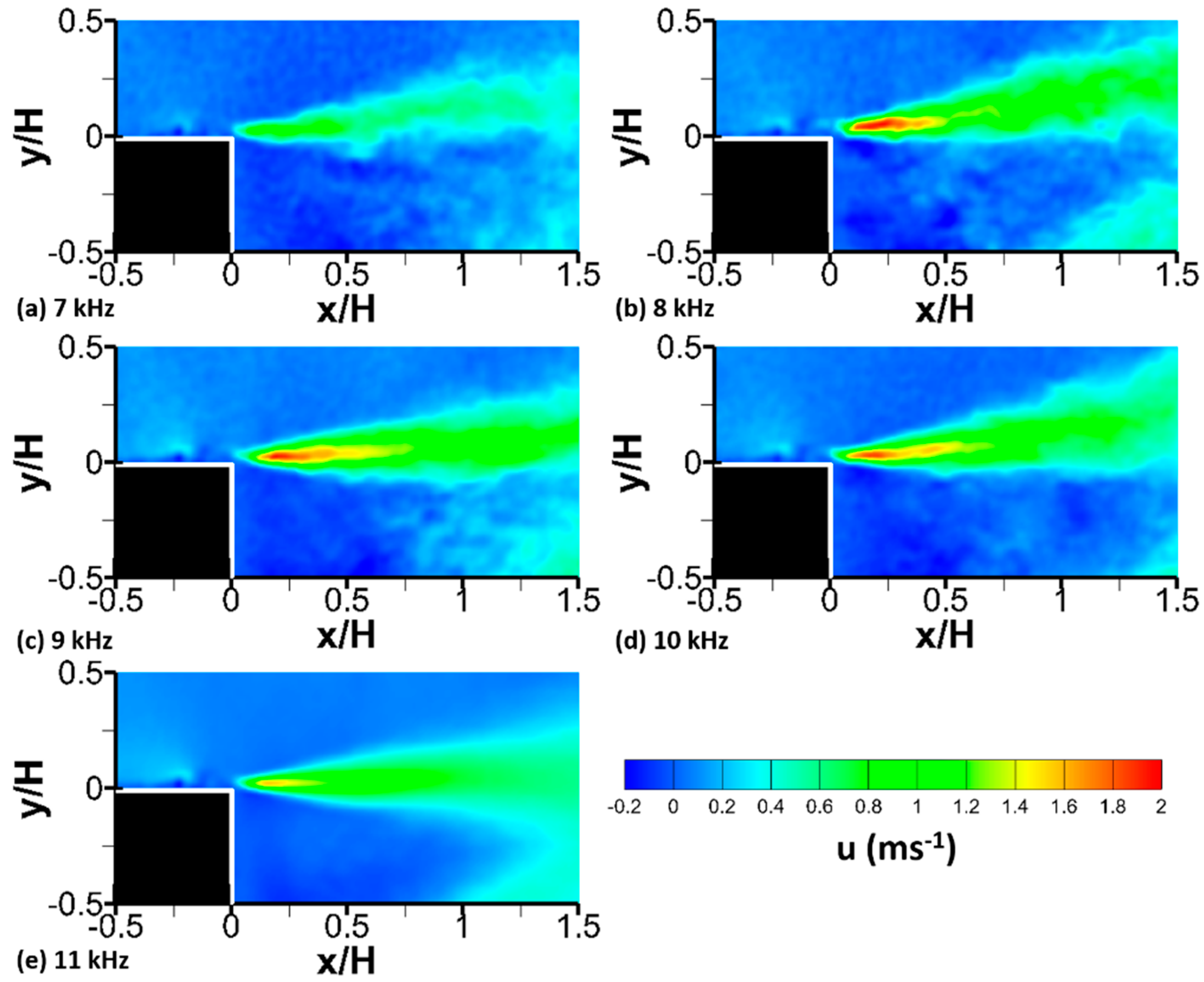
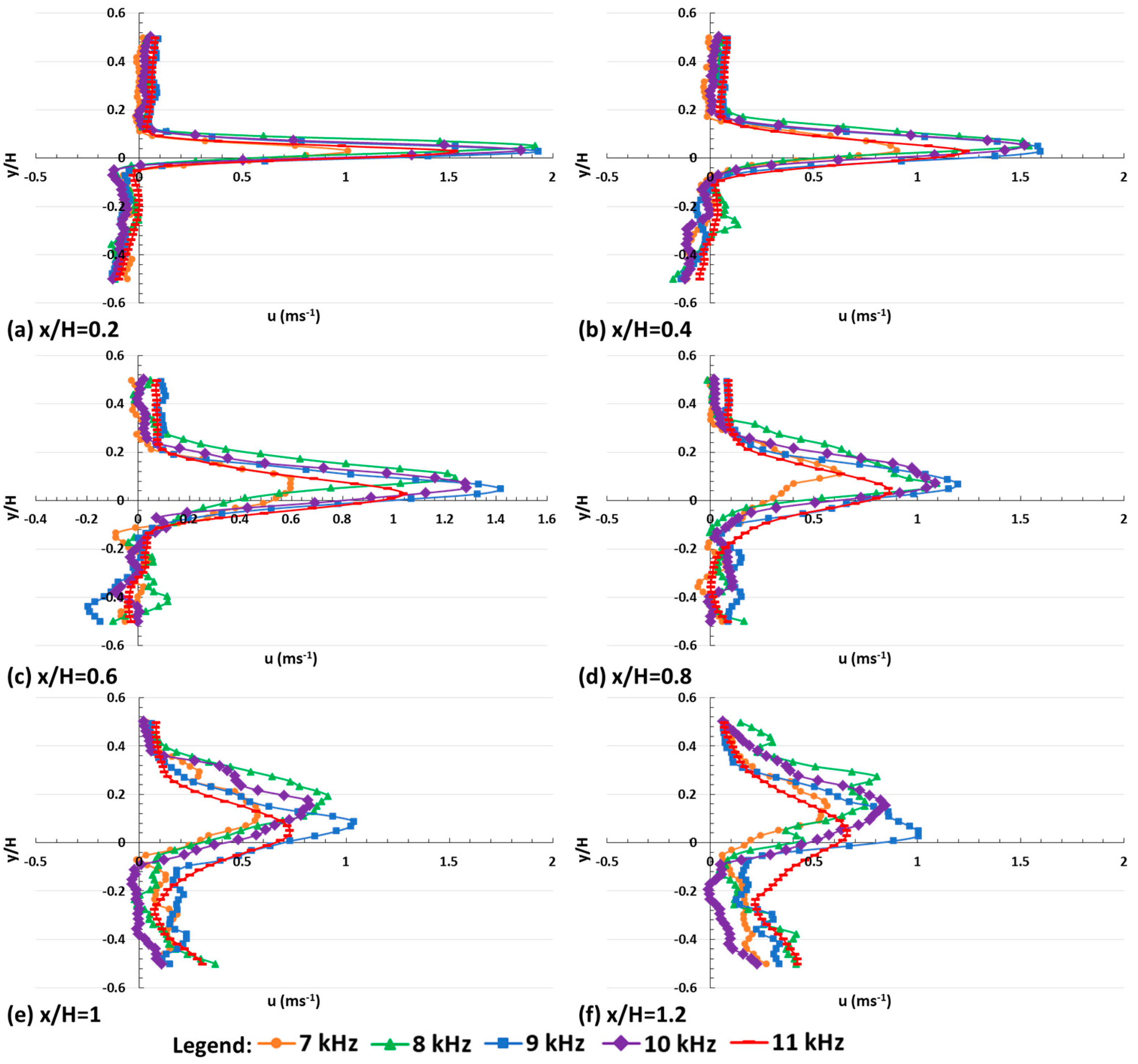
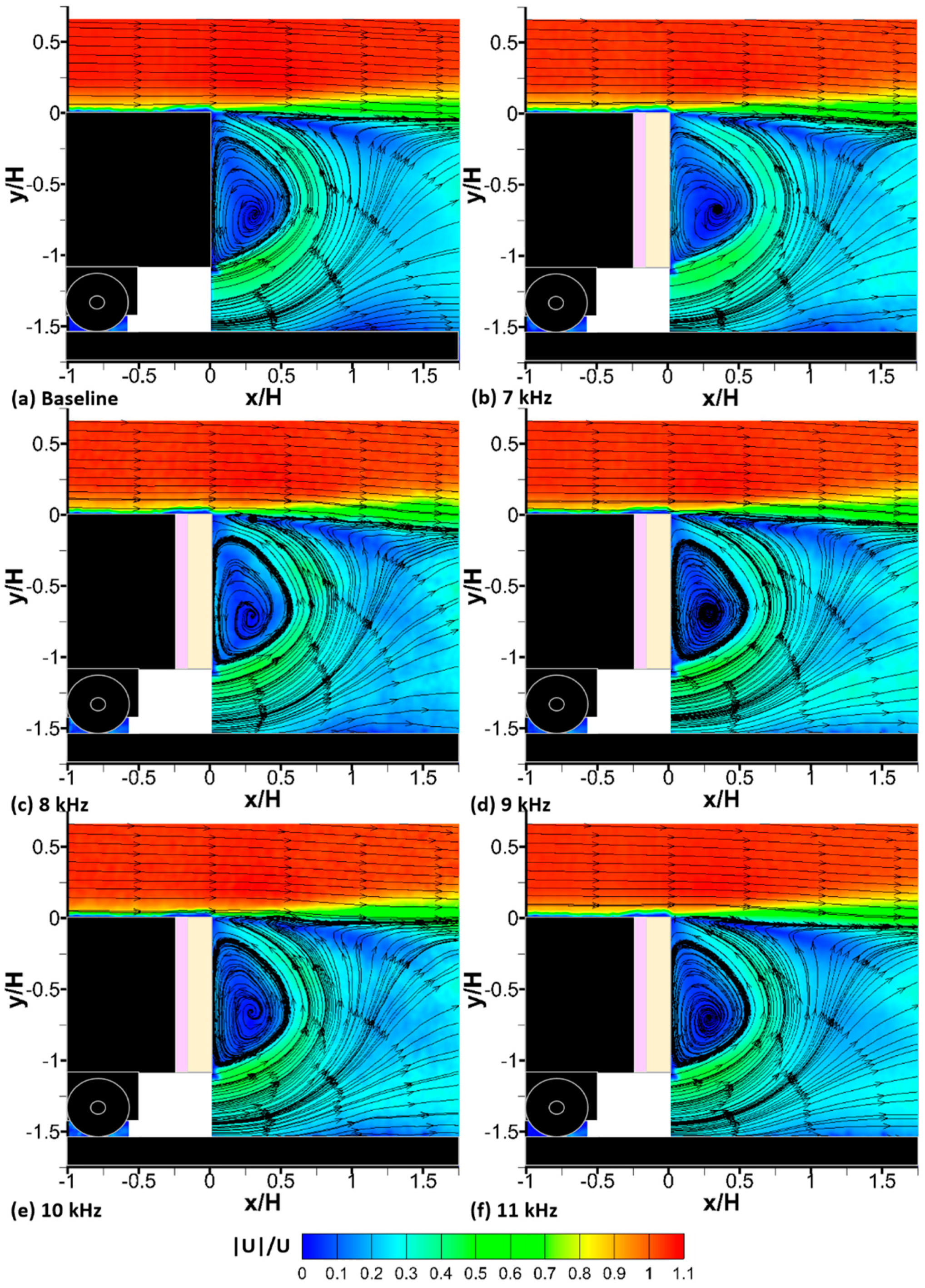
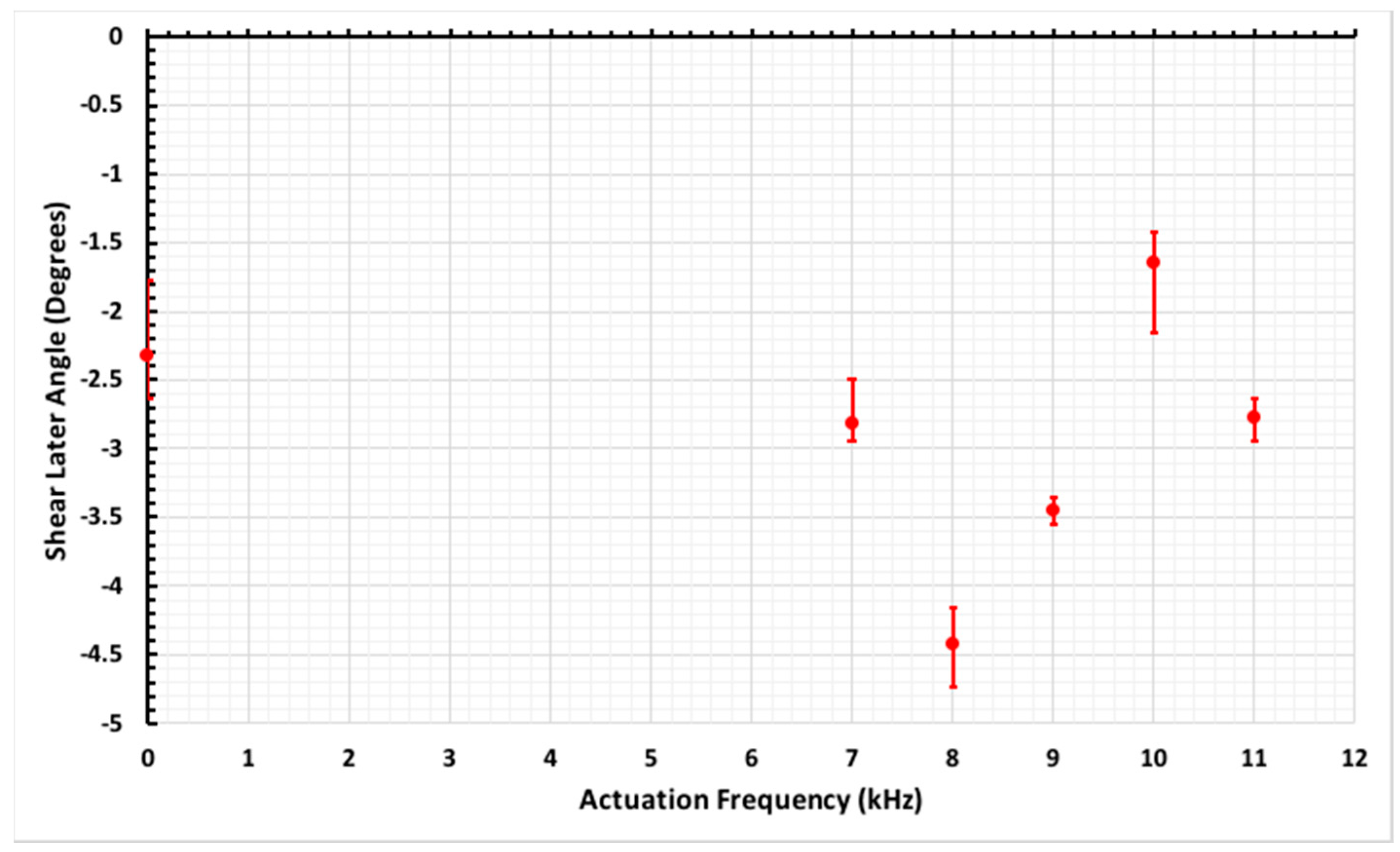
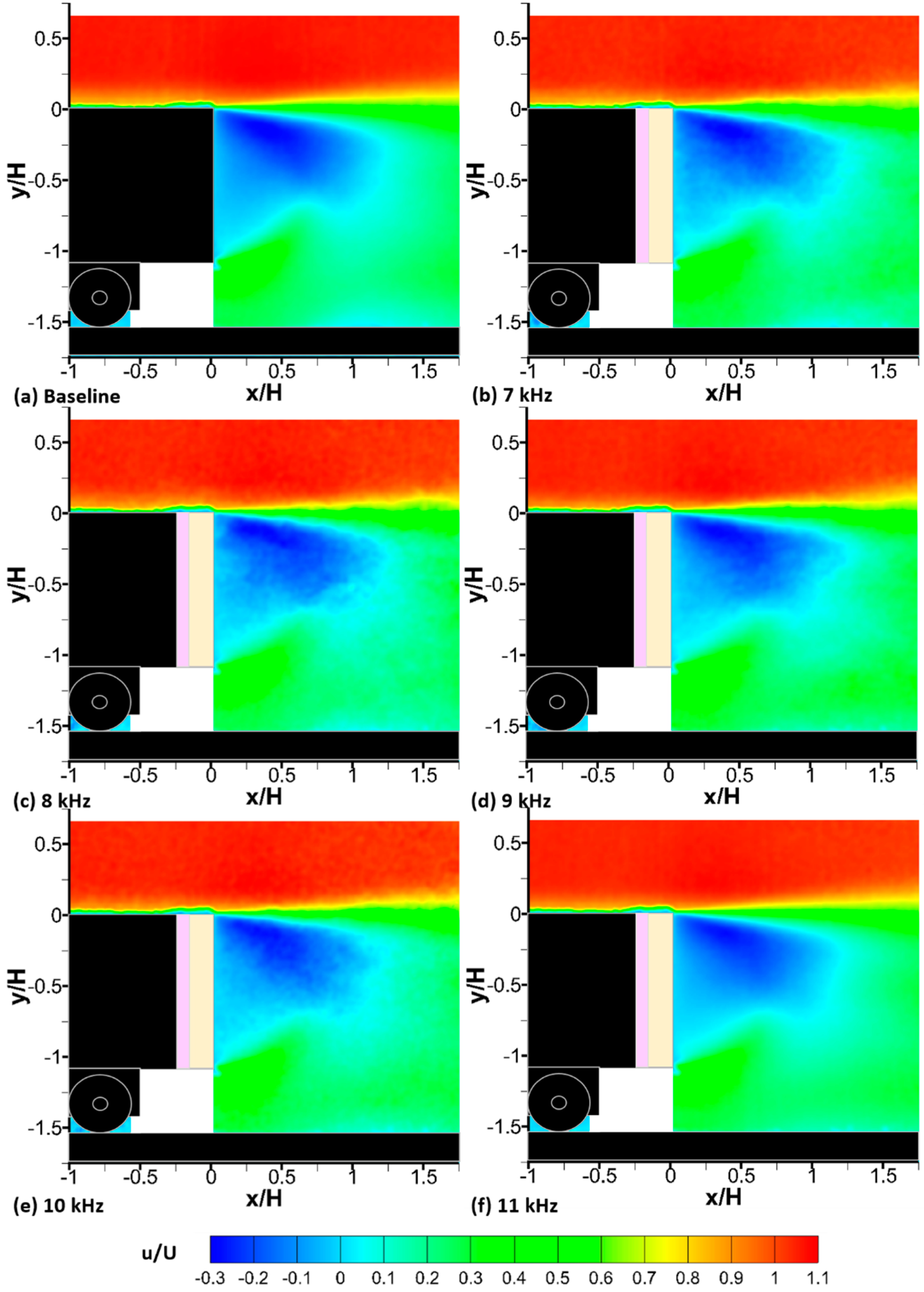
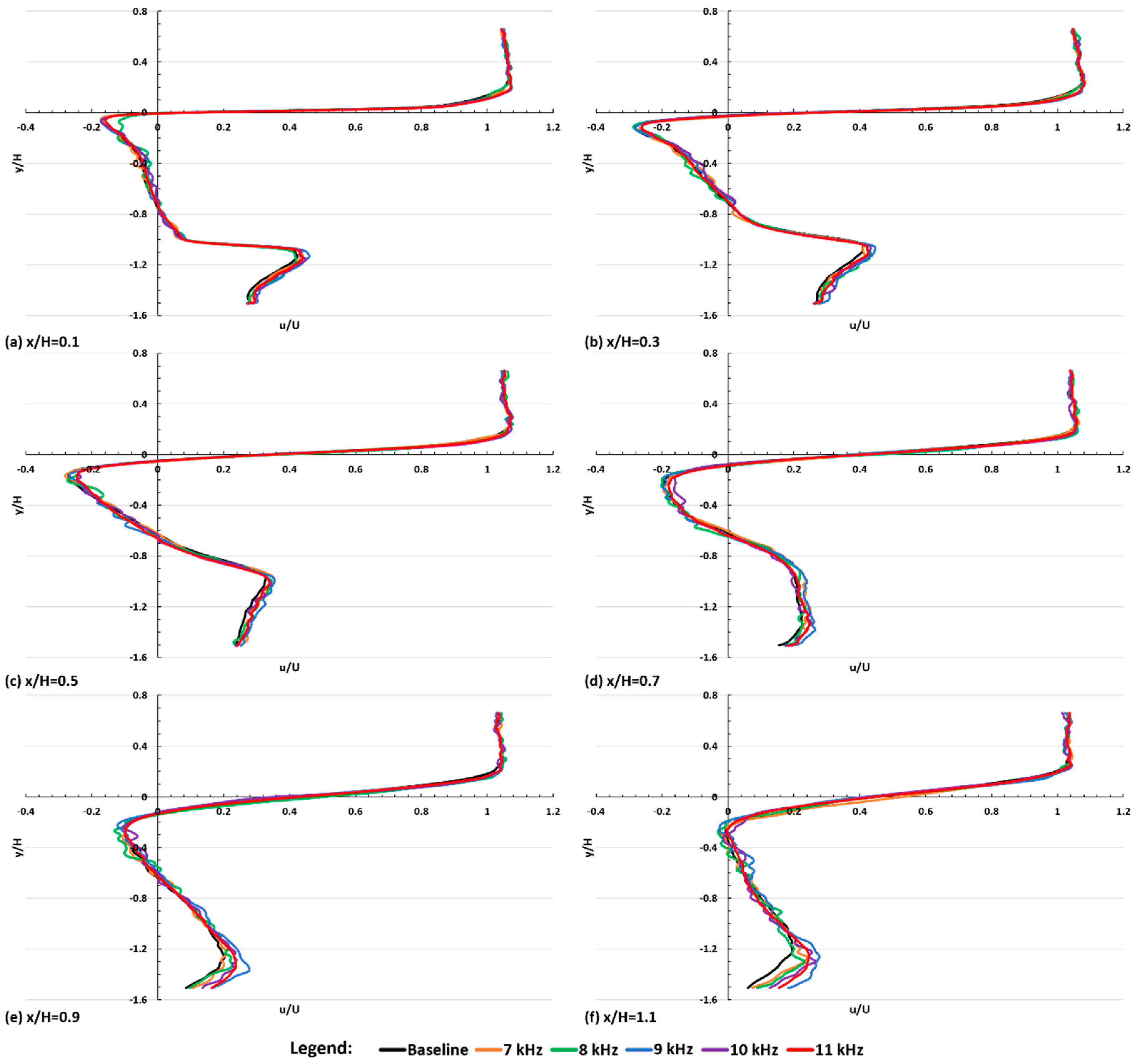
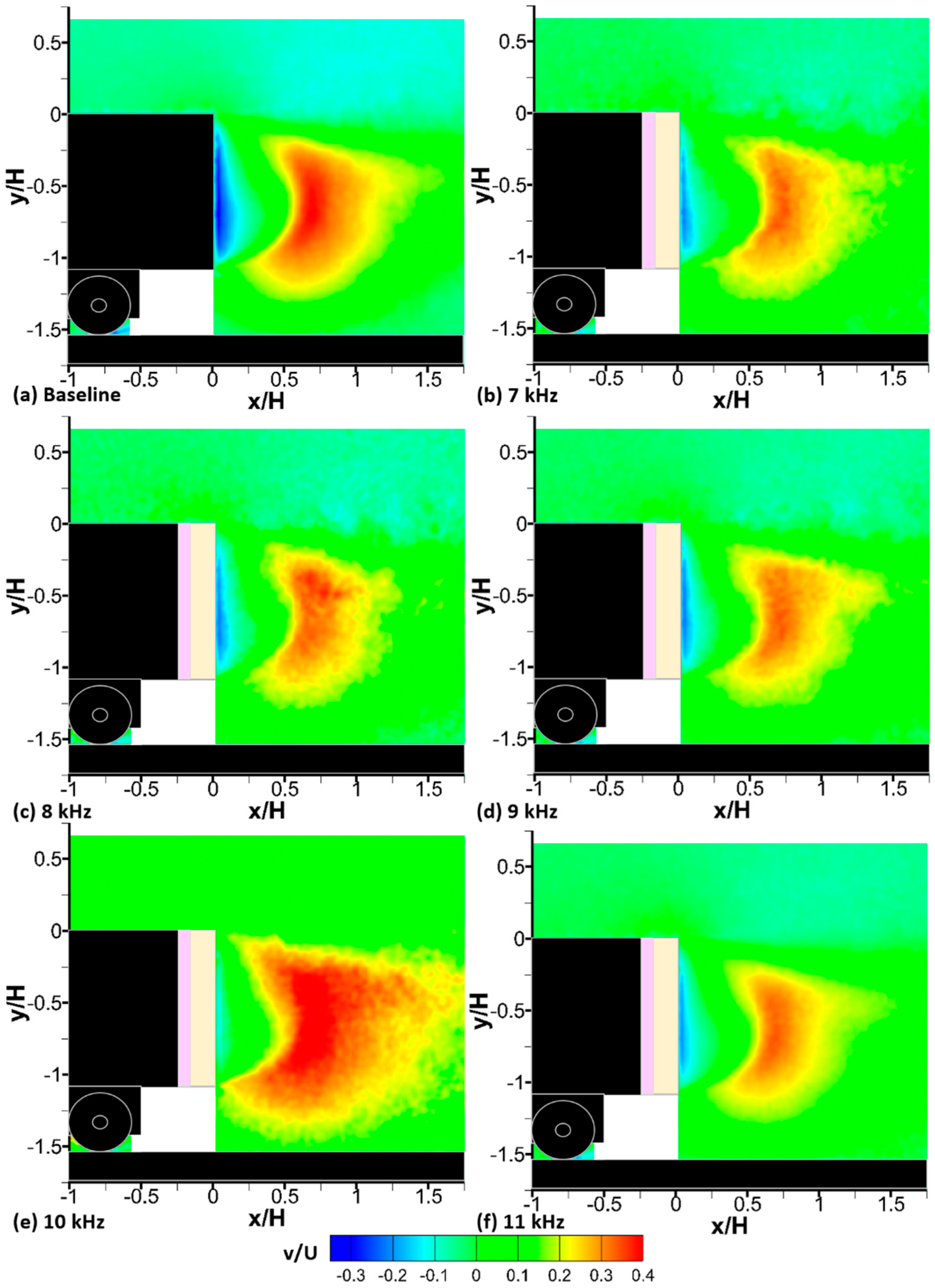
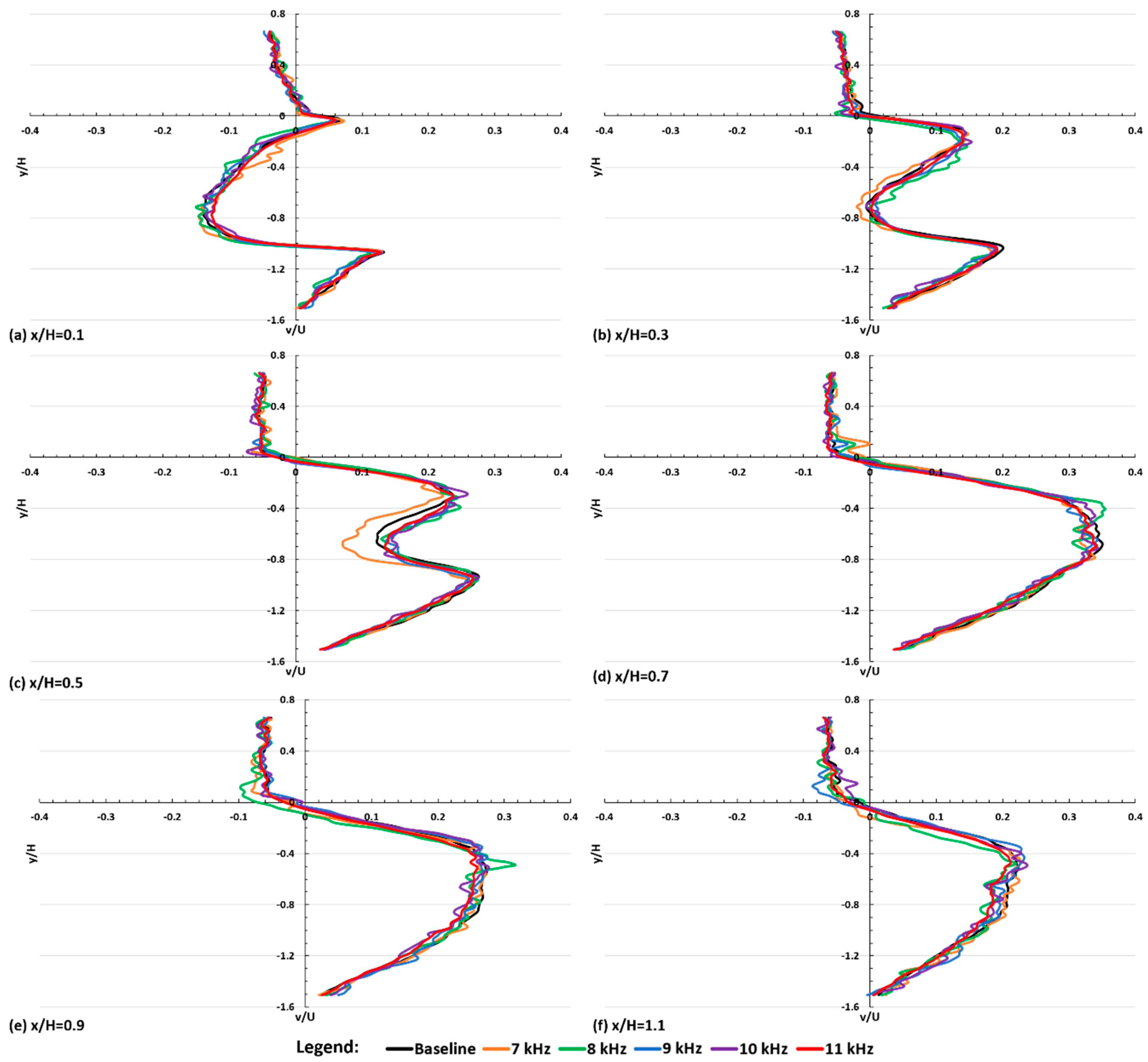
3.2.2. Time-Averaged Velocity Field
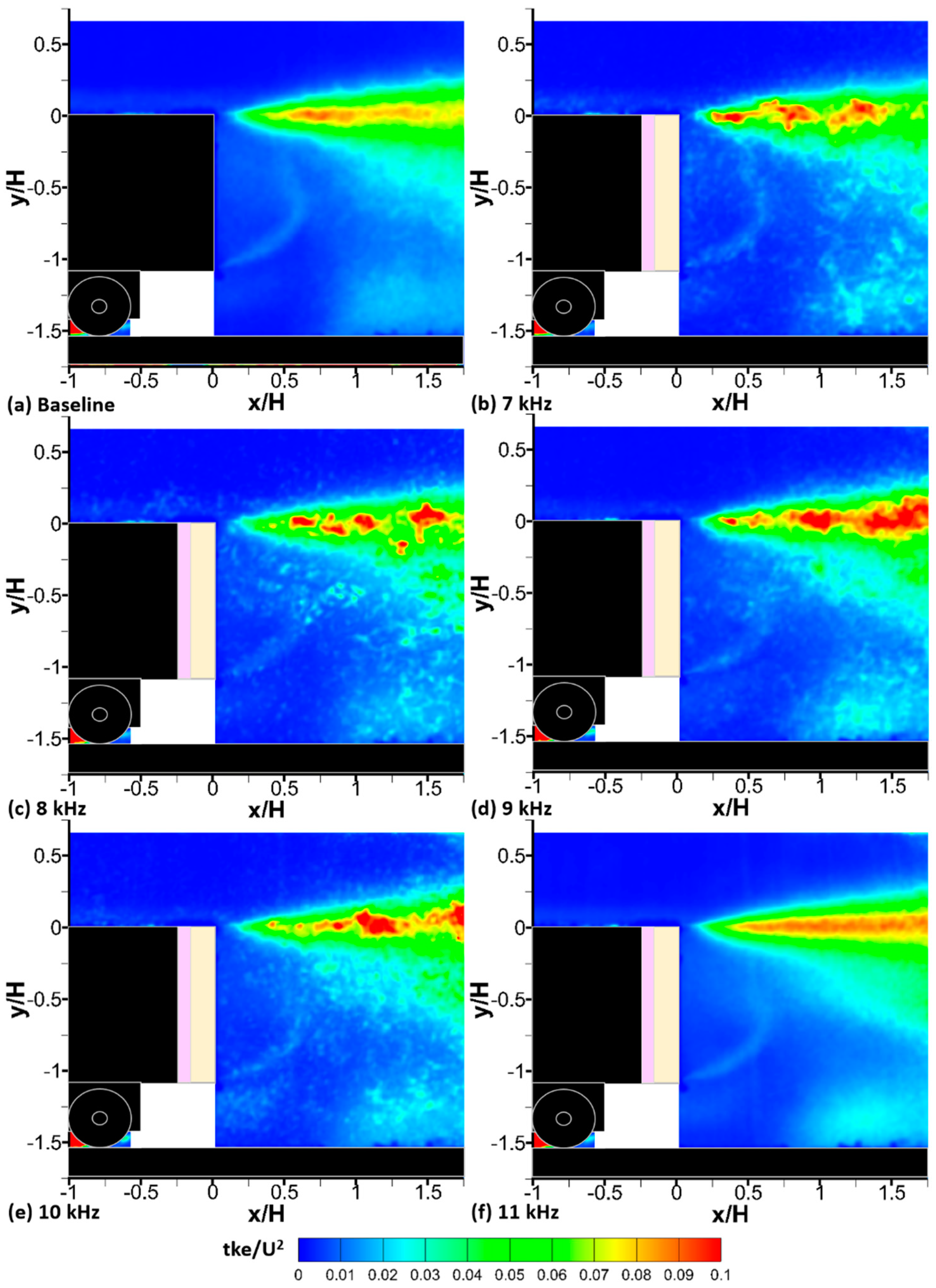
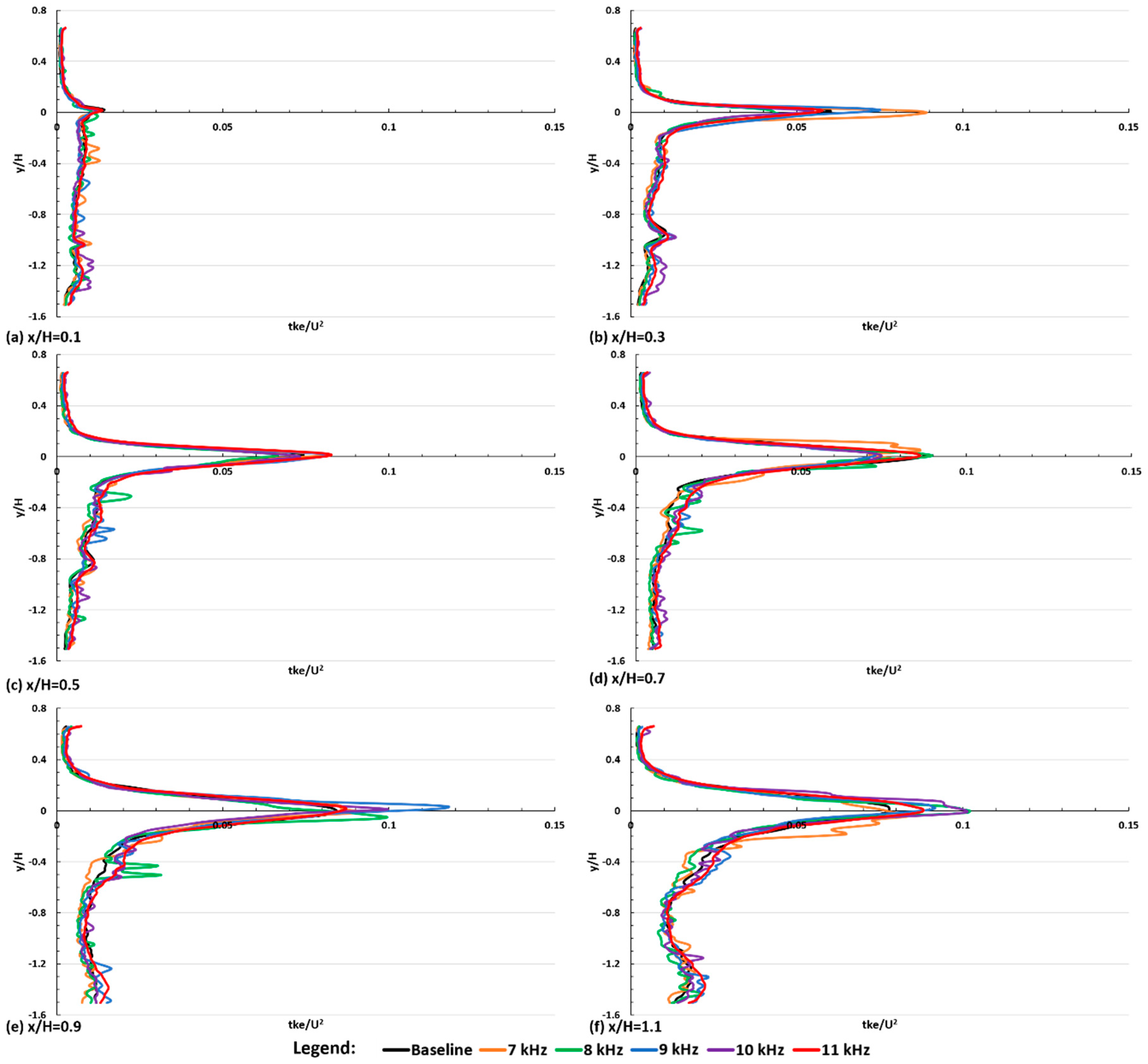
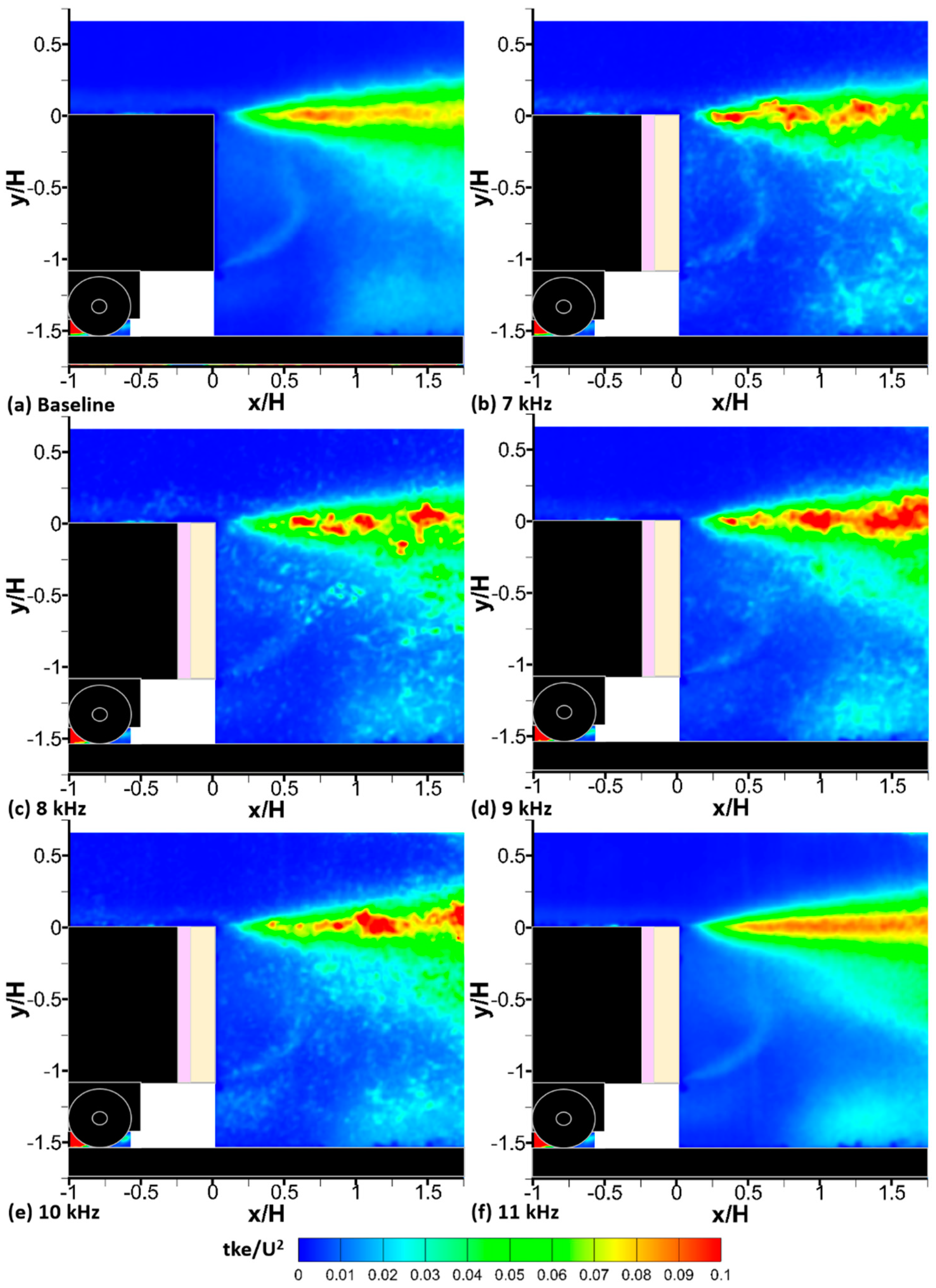
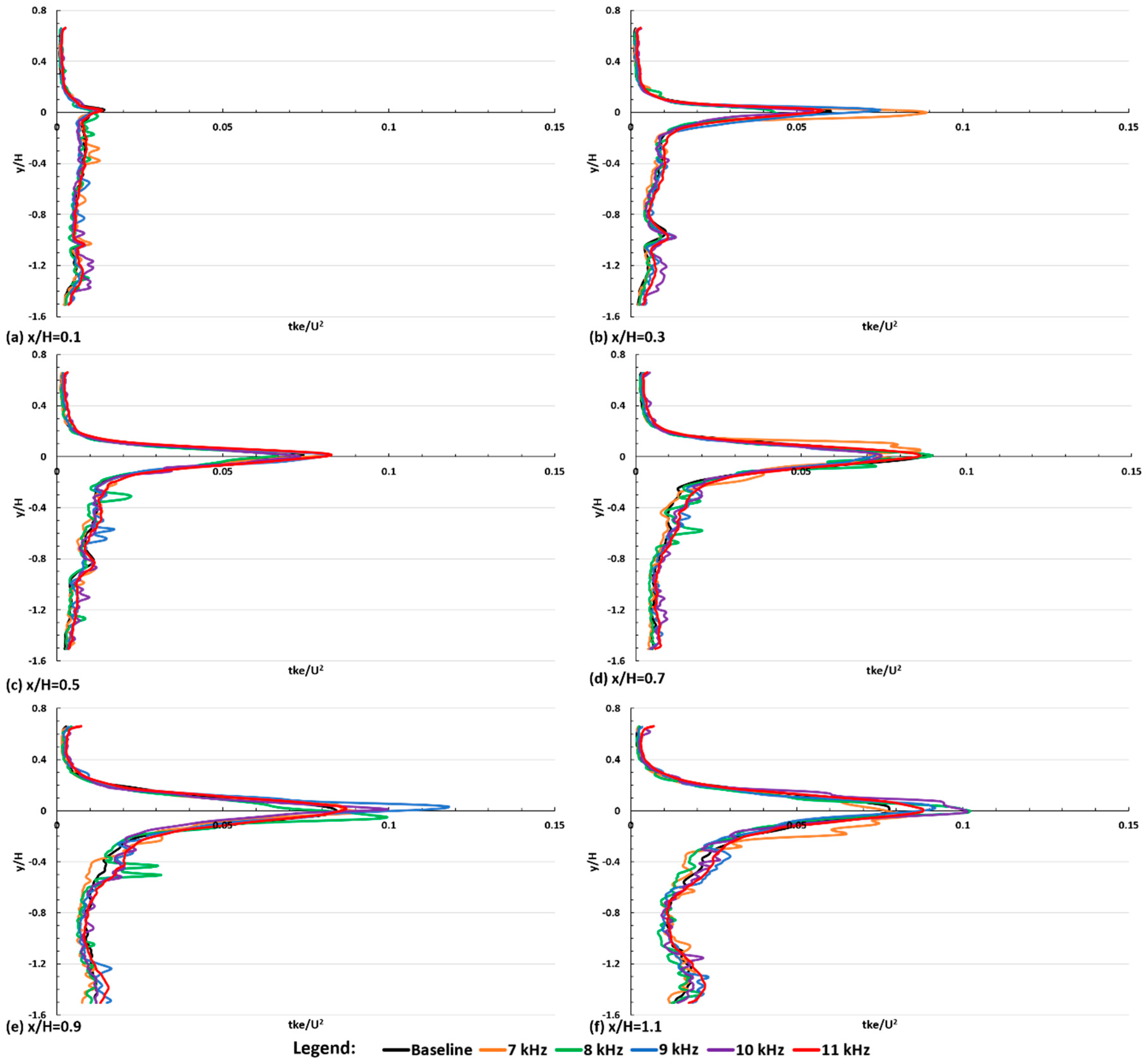
3.2.3. Flow Steadiness and Turbulence
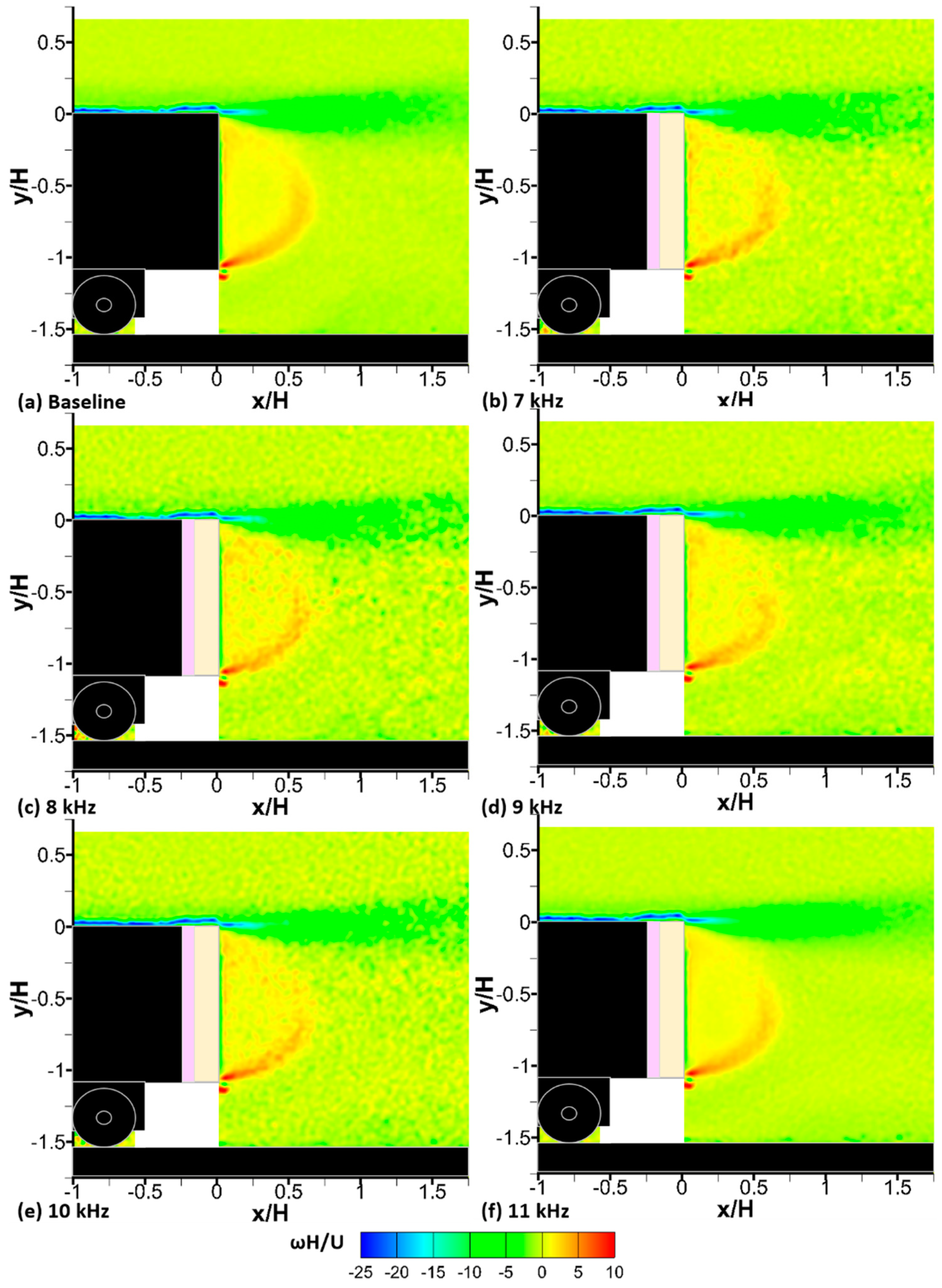
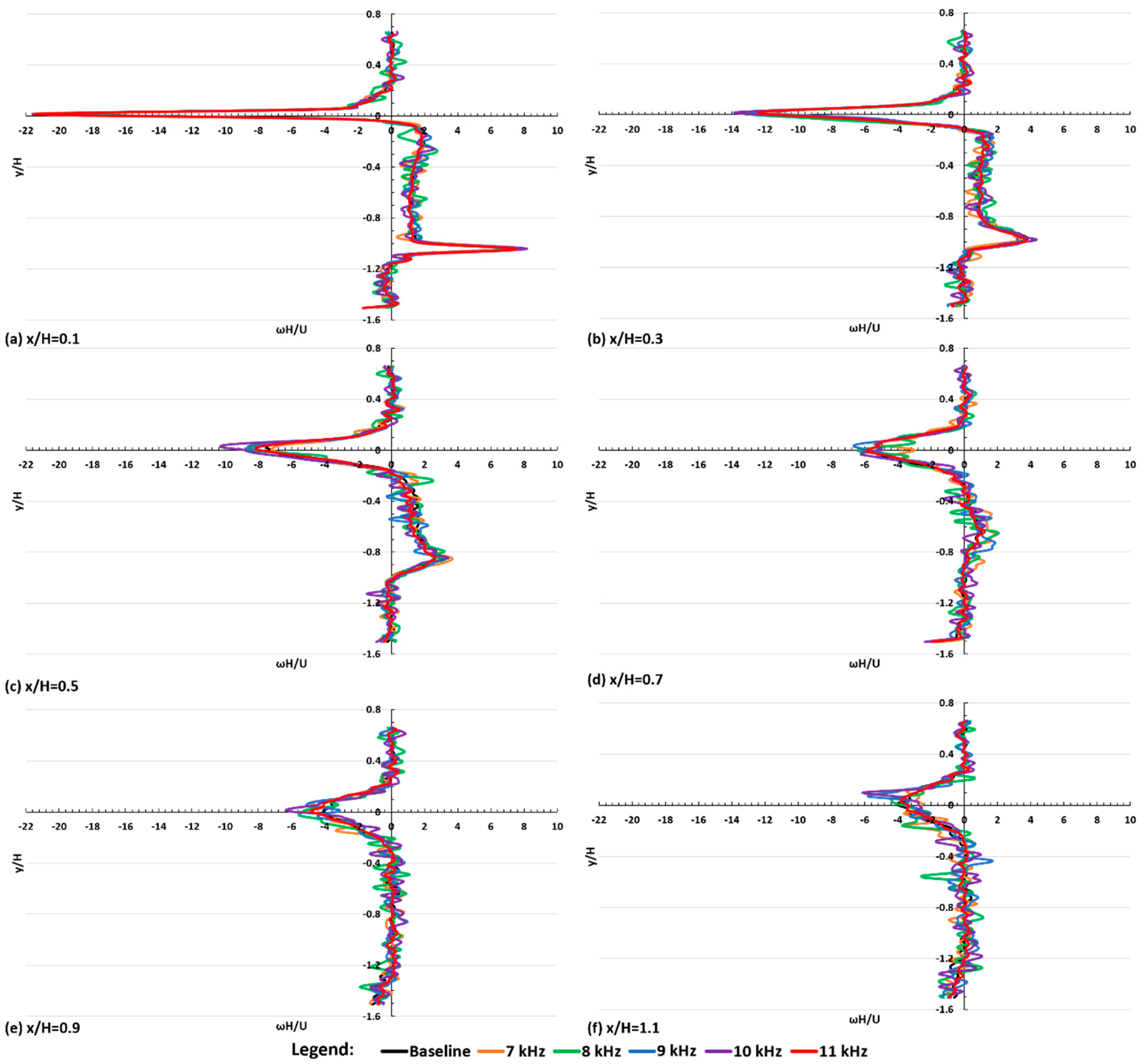
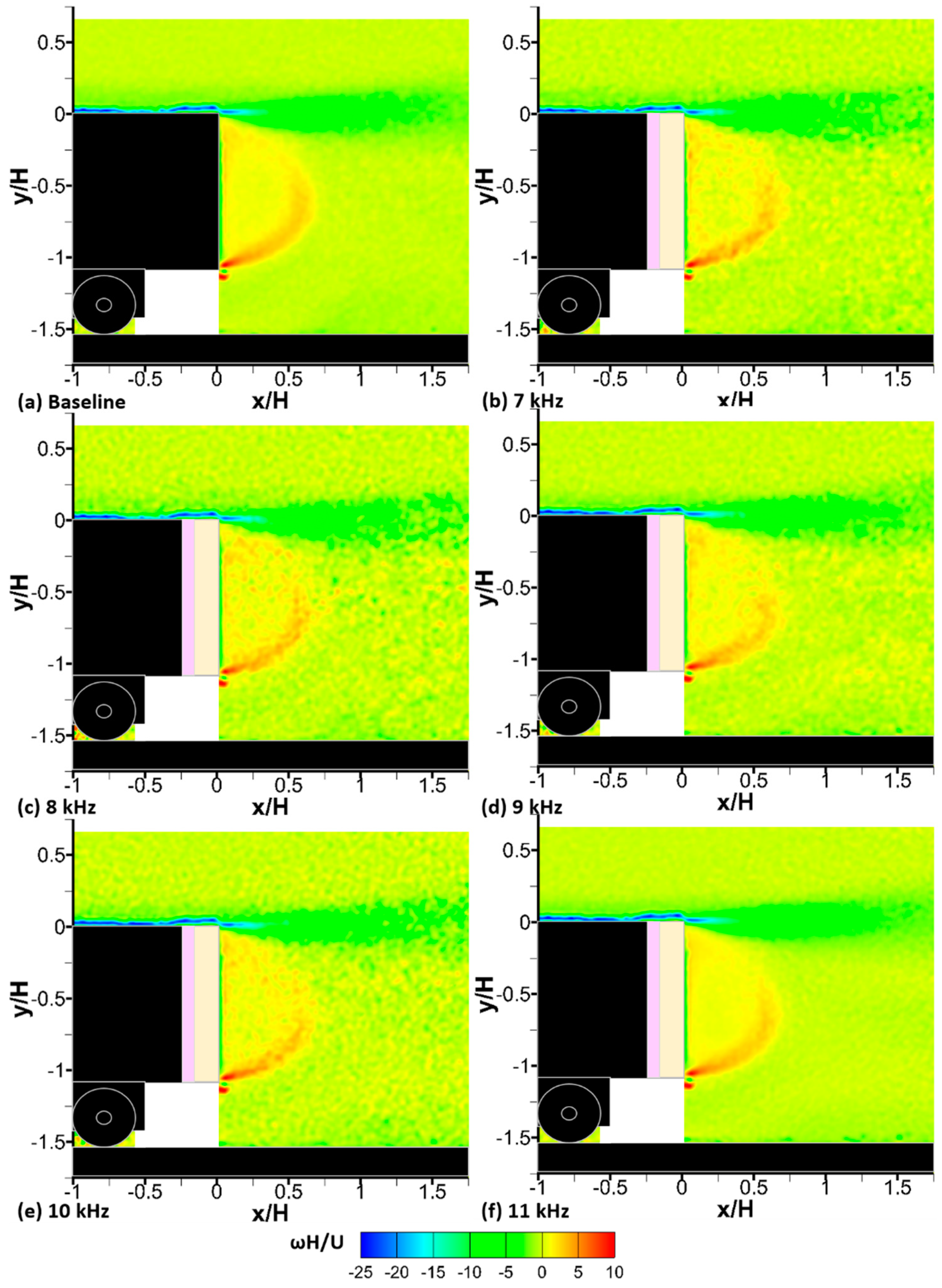
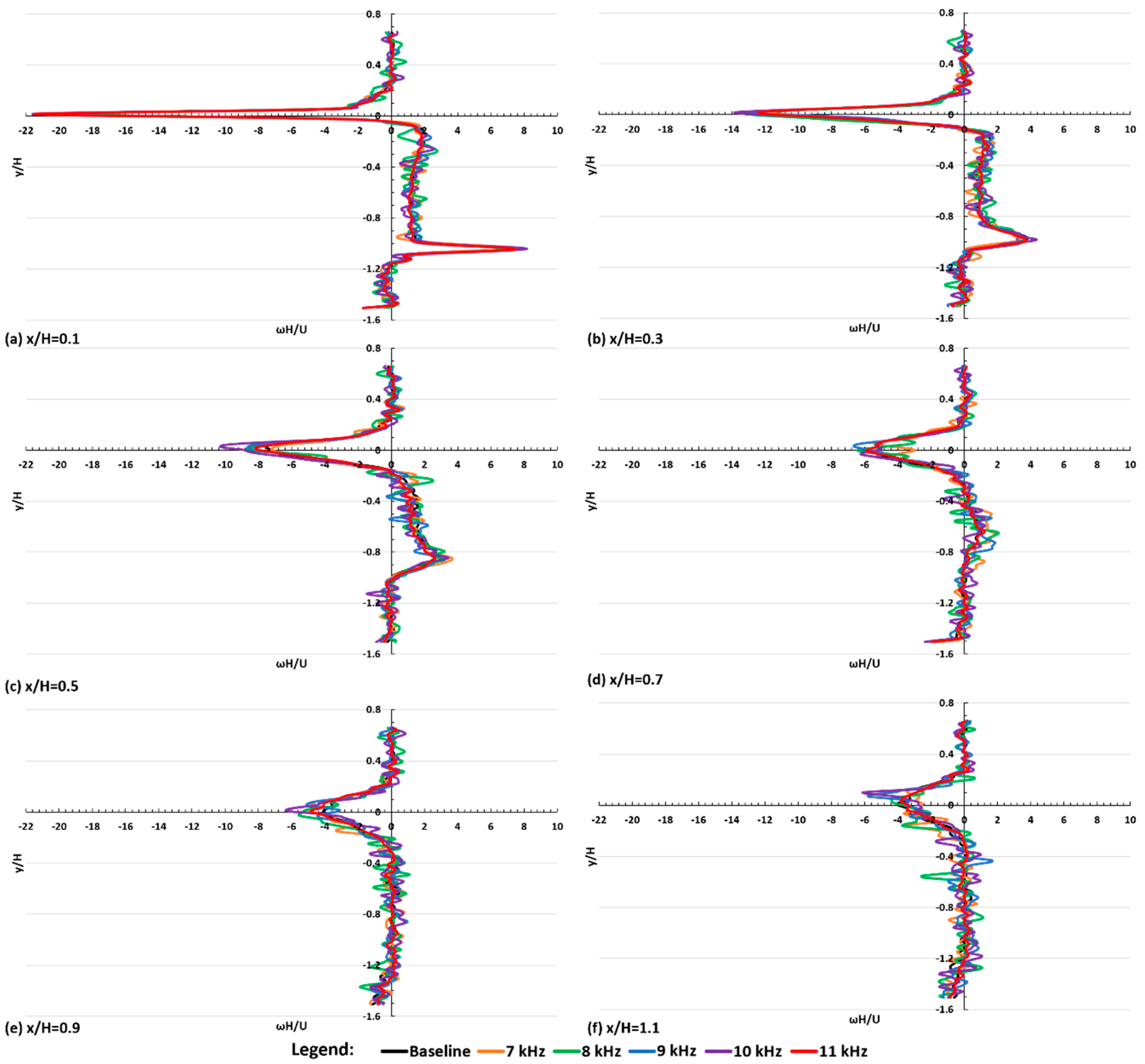
3.2.4. Flow Vorticity
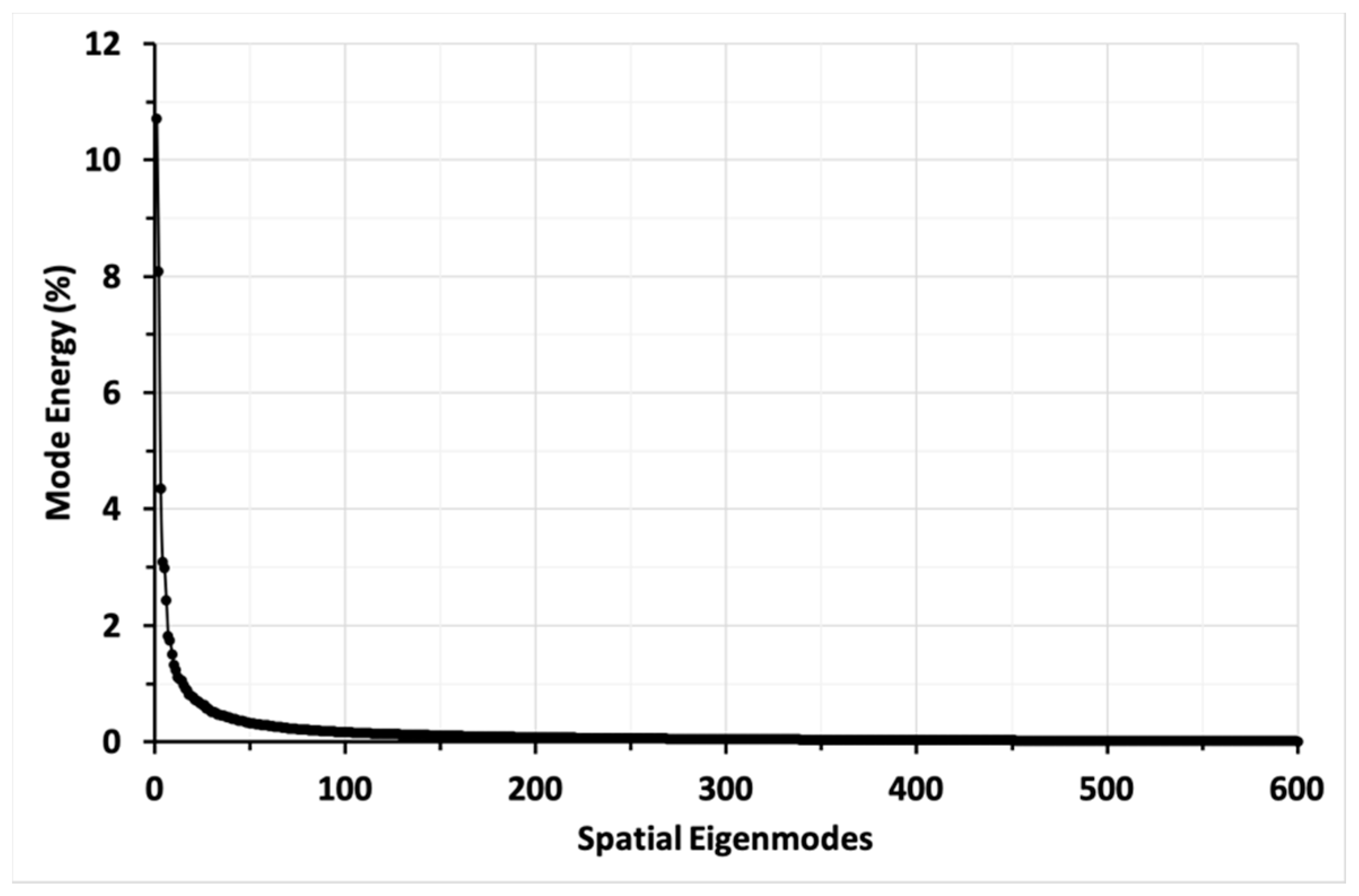
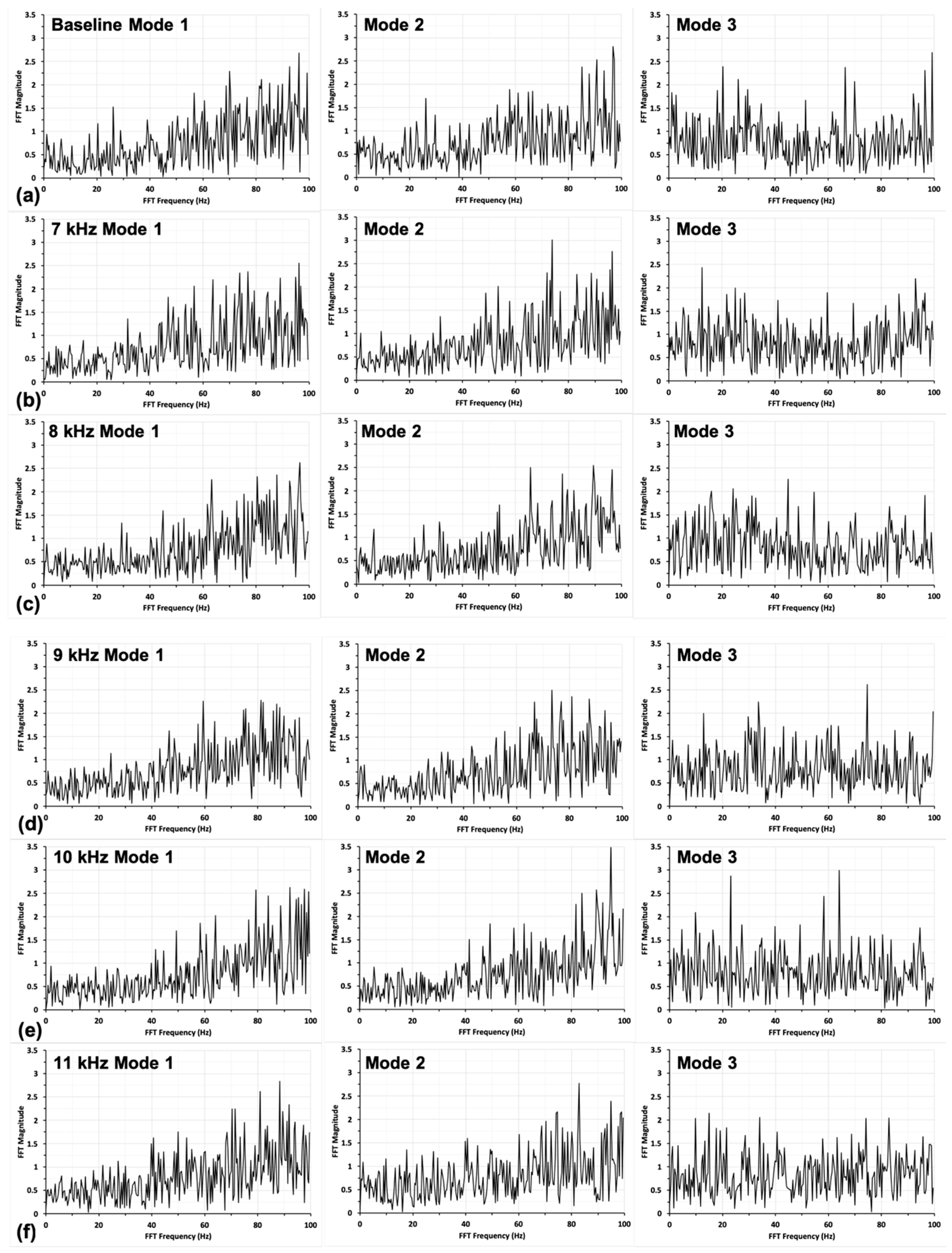
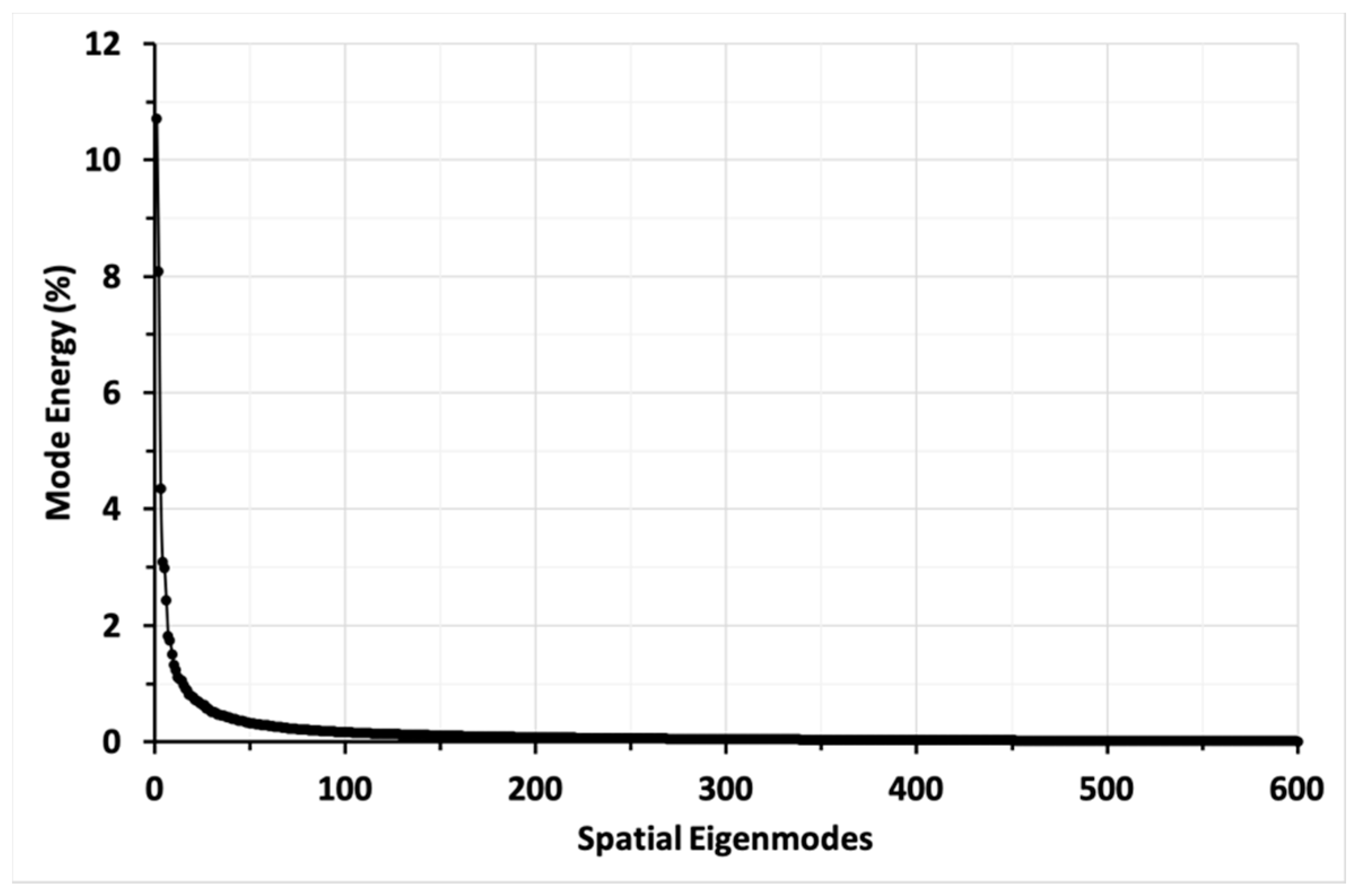
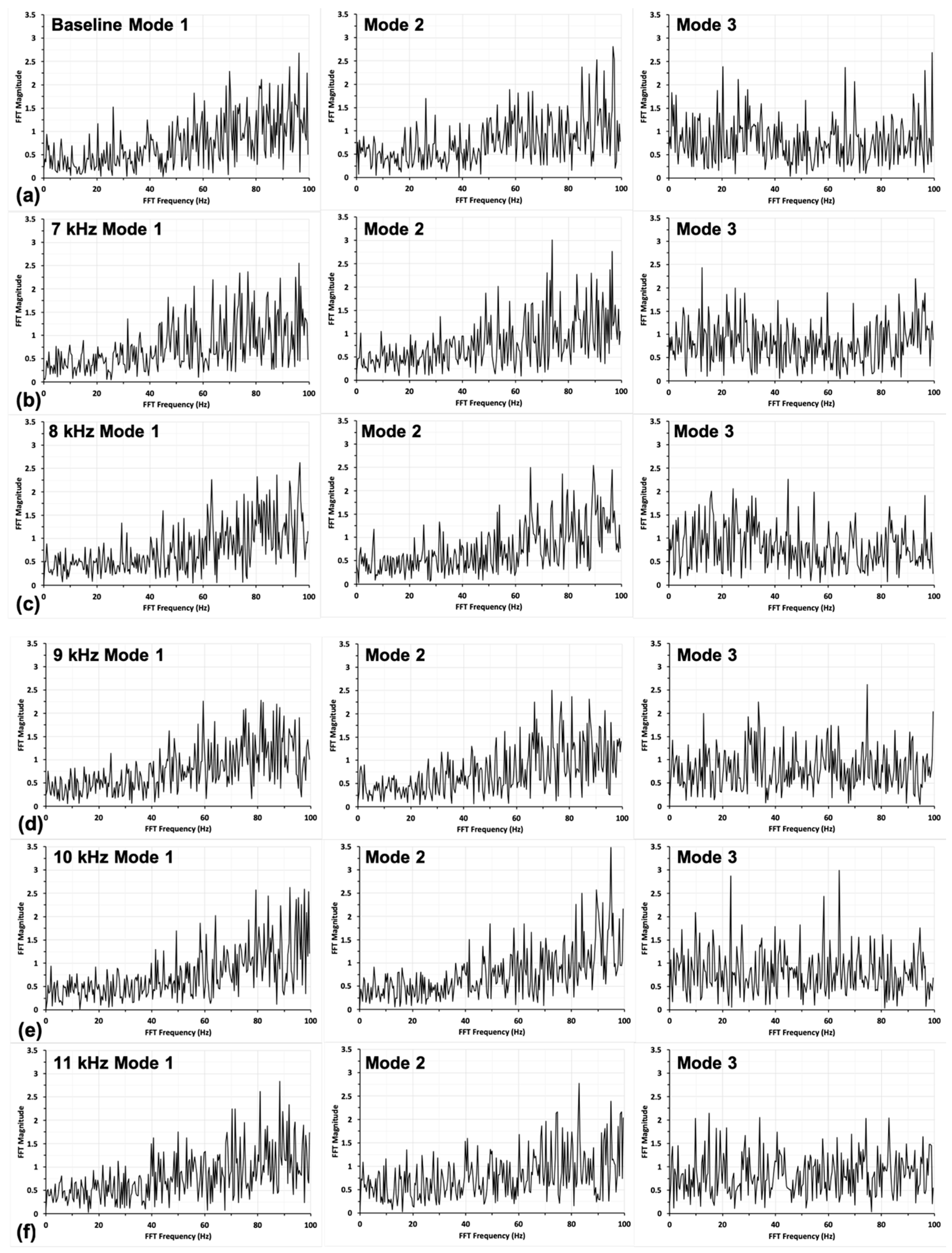
3.2.5. Frequency Analysis
3.2.6. General Discussion of Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wood, R.M. A discussion of a heavy truck advanced aerodynamic trailer system. In Proceedings of the International Forum of Road Transport Technology (IFRTT) 9th International Symposium on Heavy Vehicle Weights and Dimensions, Pennsylvania State University, State Colleague, PA, USA, 18–22 June 2006. [Google Scholar]
- European Commission Research and Innovation: <<Aerodynamics and Flexible Trucks>> Webpage. Available online: https://ec.europa.eu/research/participants/portal/desktop/en/opportunities/h2020/topics/gv-09-2017.html (accessed on 23 January 2017).
- Balkanyi, S.R.; Bernal, L.P.; Khalighi, B. Analysis of the Near Wake of Bluff Bodies in Ground Proximity; ASME Papers; The American Society of Mechanical Engineers: New Orleans, LA, USA, 2002. [Google Scholar] [CrossRef]
- Verzicco, R.; Fatica, M.; Iaccarino, G.; Moin, P.; Khalighi, B. Large eddy simulation of a road vehicle with drag-reduction devices. AIAA J. 2002, 40, 2447–2455. [Google Scholar] [CrossRef]
- Yi, W. Drag Reduction of A Three-Dimensional Car Model Using Passive Control Device. Ph.D. Thesis, Seoul National University, Seoul, Korea, 2007. [Google Scholar]
- Peterson, R.L. Drag Reduction Obtained by the Addition of A Boattail to A Box Shaped Vehicle; Technical Report of National Aeronautics and Space Administration; NASA-CR-163113; NASA: Washington, DC, USA, 1981.
- Croll, R.H.; Gutierrez, W.T.; Hassan, B.; Suazo, J.E.; Riggins, A.J. Experimental Investigation of the Ground Transportation System (GTS) Project for Heavy Vehicle Drag Reduction; SAE Technical Paper; Society of Automotive Engineers: Farmington Hills, MI, USA, 1996; paper no. 960907. [Google Scholar]
- Choi, H.; Lee, J.; Park, H. Aerodynamics of Heavy Vehicles. Annu. Rev. Fluid Mech. 2014, 46, 441–468. [Google Scholar] [CrossRef]
- Altaf, A.; Omar, A.A.; Asrar, W. Passive drag reduction of square back road vehicles. J. Wind Eng. Ind. Aerodyn. 2014, 134, 30–43. [Google Scholar] [CrossRef]
- The United Kingdom Government <<Moving Goods by Road>> Webpage. Available online: https://www.gov.uk/guidance/moving-goods-by-road (accessed on 19 July 2017).
- Lo, K.H.; Kontis, K. Flow characteristics over a tractor-trailer model with and without vane-type vortex generator installed. J. Wind Eng. Ind. Aerodyn. 2016, 159, 110–122. [Google Scholar] [CrossRef] [Green Version]
- Mugnaini, C.M. Aerodynamic Drag Reduction of A Tractor-Trailer Using Vortex Generators: A Computational Fluid Dynamic Study. Master’s Thesis, California State University, Sacramento, CA, USA, 2015. [Google Scholar]
- Patten, J.; McAuliffe, B.; Mayda, W.; Tanguay, B. Review of Aerodynamic Drag Reduction Devices for Heavy Trucks and Buses; Technical Report of National Research Council Canada; Center for Surface Transportation Technology: Ottawa, ON, Canada, 2012; CSTT-HVC-TR-205. [Google Scholar]
- Leuschen, J.; Cooper, K.R. Full-Scale Wind Tunnel Tests of Production and Prototype, Second-Generation Aerodynamic Drag-Reducing Devices for Tractor-Trailers; SAE Technical Paper; Society of Automotive Engineers: Farmington Hills, MI, USA, 2006. [Google Scholar] [CrossRef]
- Englar, R.J. Advanced Aerodynamic Devices to Improve the Performance, Economics, Handling and Safety of Heavy Vehicles; SAE Technical Paper; Society of Automotive Engineers: Farmington Hills, MI, USA, 2001. [Google Scholar] [CrossRef]
- Littlewood, R.P.; Passmore, M.A. Aerodynamic drag reduction of a simplified squareback vehicle using steady blowing. Exp. Fluids 2012, 53, 519–529. [Google Scholar] [CrossRef] [Green Version]
- Howell, J.; Sheppard, A.; Blakemore, A. Aerodynamic Drag Reduction for A Simple bluff Body Using Base Bleed; SAE Technical Paper; Society of Automotive Engineers: Farmington Hills, MI, USA, 2003. [Google Scholar] [CrossRef]
- Amitay, M.; Menicovich, D.; Gallardo, D. Enhanced fuel efficiency on tractor-trailers using synthetic jet-based active flow control. Proc. SPIE 9801 Ind. Commer. Appl. Smart Struct. Technol. 2016, 980102. [Google Scholar] [CrossRef]
- Gillieron, P.; Kourta, A. Aerodynamic drag reduction by vertical splitter plates. Exp. Fluids 2010, 48, 1–16. [Google Scholar] [CrossRef]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. D Appl. Phys. 2007, 40, 605–636. [Google Scholar] [CrossRef]
- Roth, J.R. Aerodynamic flow acceleration using paraelectric and peristaltic electrohydrodynamic effects of an one atmosphere uniform glow discharge plasma. Phys. Plasma 2003, 10, 2117. [Google Scholar] [CrossRef]
- Corke, T. Plasma flow control optimized airfoil. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, AIAA-2006-1208, Reno, NV, USA, 9–12 January 2006. [Google Scholar]
- He, C.; Patel, M.P.; Corke, T.C. Plasma flaps and slats: An application of weakly ionized plasma actuators. J. Aircr. 2009, 46, 864–873. [Google Scholar] [CrossRef]
- Post, M.L.; Corke, T.C. Separation control using plasma actuators: Dynamic stall vortex control on oscillating airfoil. AIAA J. 2006, 44, 3125–3135. [Google Scholar] [CrossRef]
- Ramakumar, K.; Jacob, J.D. Flow control and lift enhancement using plasma actuators. In Proceedings of the 35th AIAA Fluid Dynamics Conference and Exhibit, AIAA 2005-4635, Toronto, ON, Canada, 6–9 June 2005. [Google Scholar]
- Thomas, F.O.; Kozlov, A.; Corke, T.C. Plasma actuators for cylinder flow control and noise reduction. AIAA J. 2008, 46, 1921–1931. [Google Scholar] [CrossRef]
- Luo, X. Plasma Based Jet Actuators for Flow Control. Ph.D. Thesis, University of Southampton, Southampton, UK, 2012. [Google Scholar]
- Do, H.; Kim, W.; Mungal, M.G.; Cappelli, M.A. Bluff body flow separation control using surface dielectric barrier discharges. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, AIAA-2007-939, Reno, NV, USA, 8–11 January 2007. [Google Scholar]
- Roy, S.; Zhao, P.; DasGupta, A.; Soni, J. Dielectric barrier discharge actuator for vehicle drag reduction at highway speeds. AIP Adv. 2016, 6, 025322. [Google Scholar] [CrossRef] [Green Version]
- Lo, K.H.; Kontis, K. Flow around and articulated lorry model. Exp. Thermal Fluid Sci. 2017, 82, 58–74. [Google Scholar] [CrossRef]
- Gurlek, C.; Sahin, B.; Ozkan, G.M. PIV studies around a bus model. Exp. Thermal Fluid Sci. 2012, 38, 115–126. [Google Scholar] [CrossRef]
- Krajnovic, S.; Davidson, L. Numerical study of the flow around a bus-shaped body. ASME J. Fluids Eng. 2003, 125, 500–509. [Google Scholar] [CrossRef]
- Krajnovic, S.; Davidson, L. Influence of floor motions in wind tunnels on the aerodynamics of road vehicles. J. Wind Eng. Ind. Aerodyn. 2005, 93, 677–696. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | CD | ΔCD |
|---|---|---|
| Baseline case, no plasma actuation | 0.725 | - |
| Controlled case, plasma actuation at 7 kHz | 0.729 | +0.004 |
| Controlled case, plasma actuation at 8 kHz | 0.725 | +0.000 |
| Controlled case, plasma actuation at 9 kHz | 0.724 | −0.001 |
| Controlled case, plasma actuation at 10 kHz | 0.725 | +0.000 |
| Controlled case, plasma actuation at 11 kHz | 0.726 | +0.001 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo, K.-H.; Sriram, R.; Kontis, K. Wake Flow Characteristics over an Articulated Lorry Model with/without AC-DBD Plasma Actuation. Appl. Sci. 2019, 9, 2426. https://doi.org/10.3390/app9122426
Lo K-H, Sriram R, Kontis K. Wake Flow Characteristics over an Articulated Lorry Model with/without AC-DBD Plasma Actuation. Applied Sciences. 2019; 9(12):2426. https://doi.org/10.3390/app9122426
Chicago/Turabian StyleLo, Kin-Hing, Rengarajan Sriram, and Konstantinos Kontis. 2019. "Wake Flow Characteristics over an Articulated Lorry Model with/without AC-DBD Plasma Actuation" Applied Sciences 9, no. 12: 2426. https://doi.org/10.3390/app9122426
APA StyleLo, K.-H., Sriram, R., & Kontis, K. (2019). Wake Flow Characteristics over an Articulated Lorry Model with/without AC-DBD Plasma Actuation. Applied Sciences, 9(12), 2426. https://doi.org/10.3390/app9122426