Electrowetting on Dielectric (EWOD) Device with Dimple Structures for Highly Accurate Droplet Manipulation


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Methods
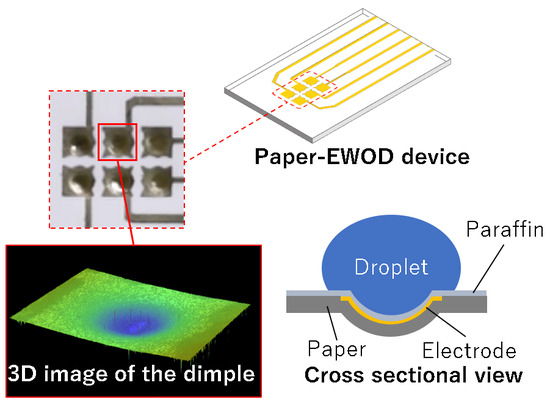
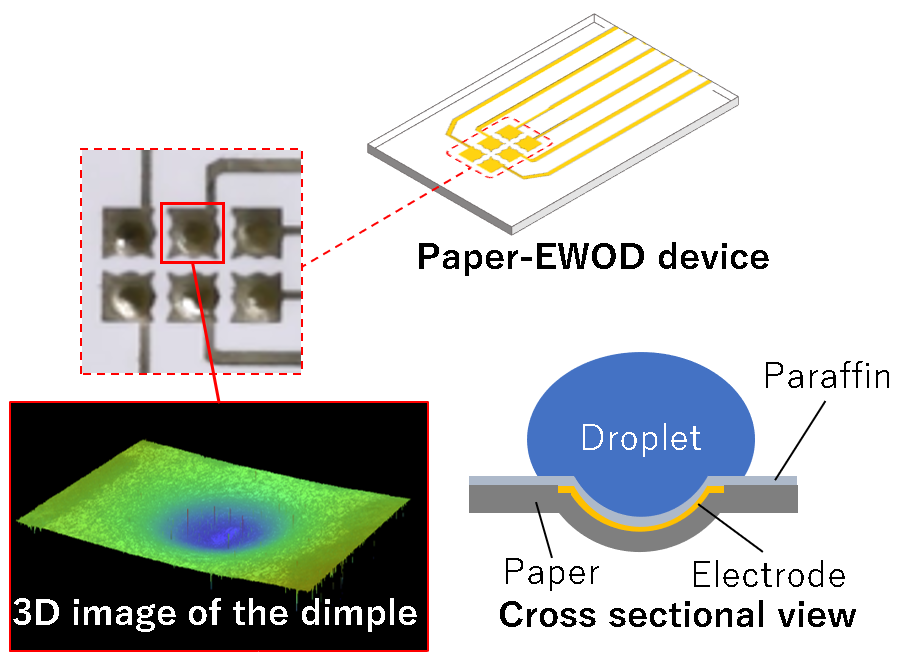
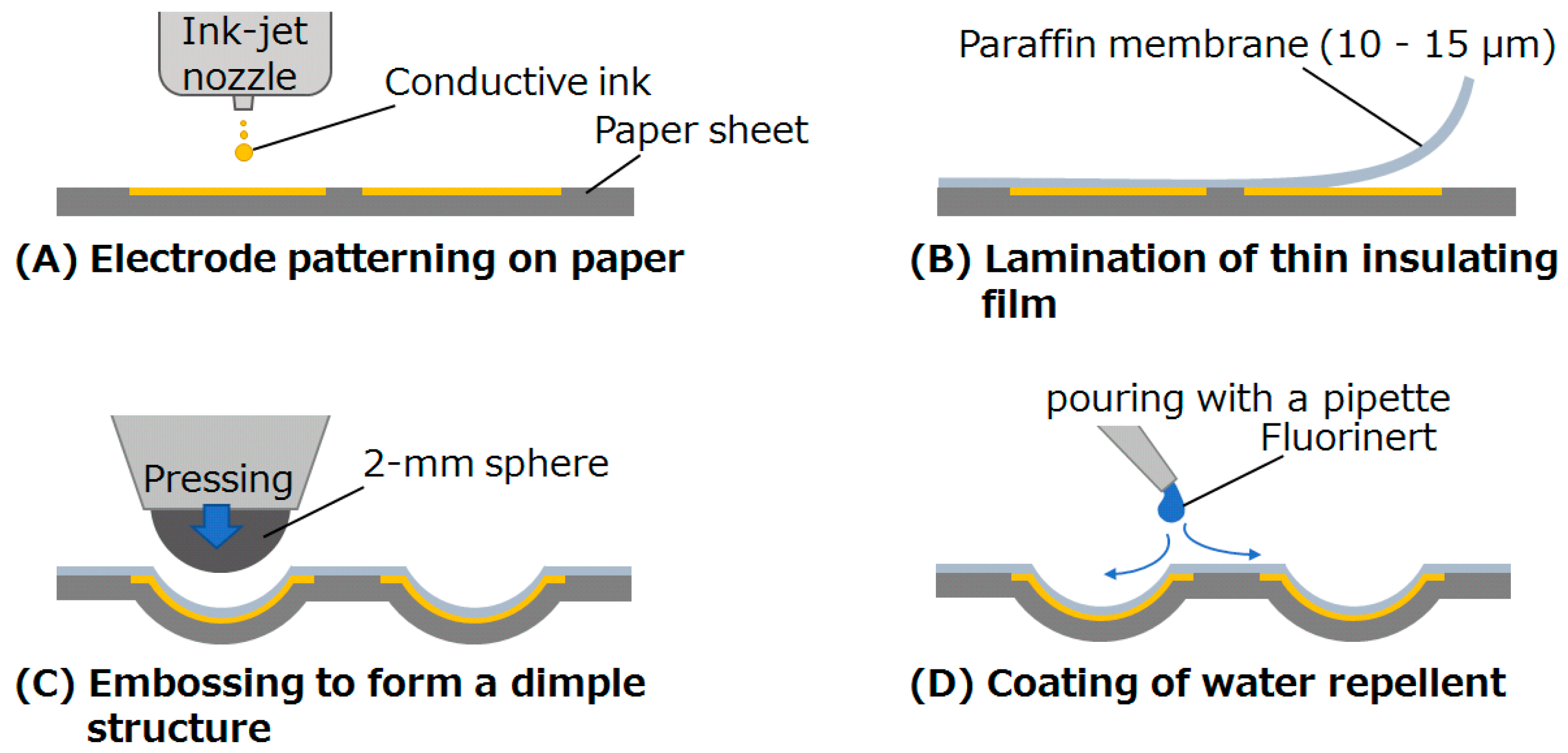
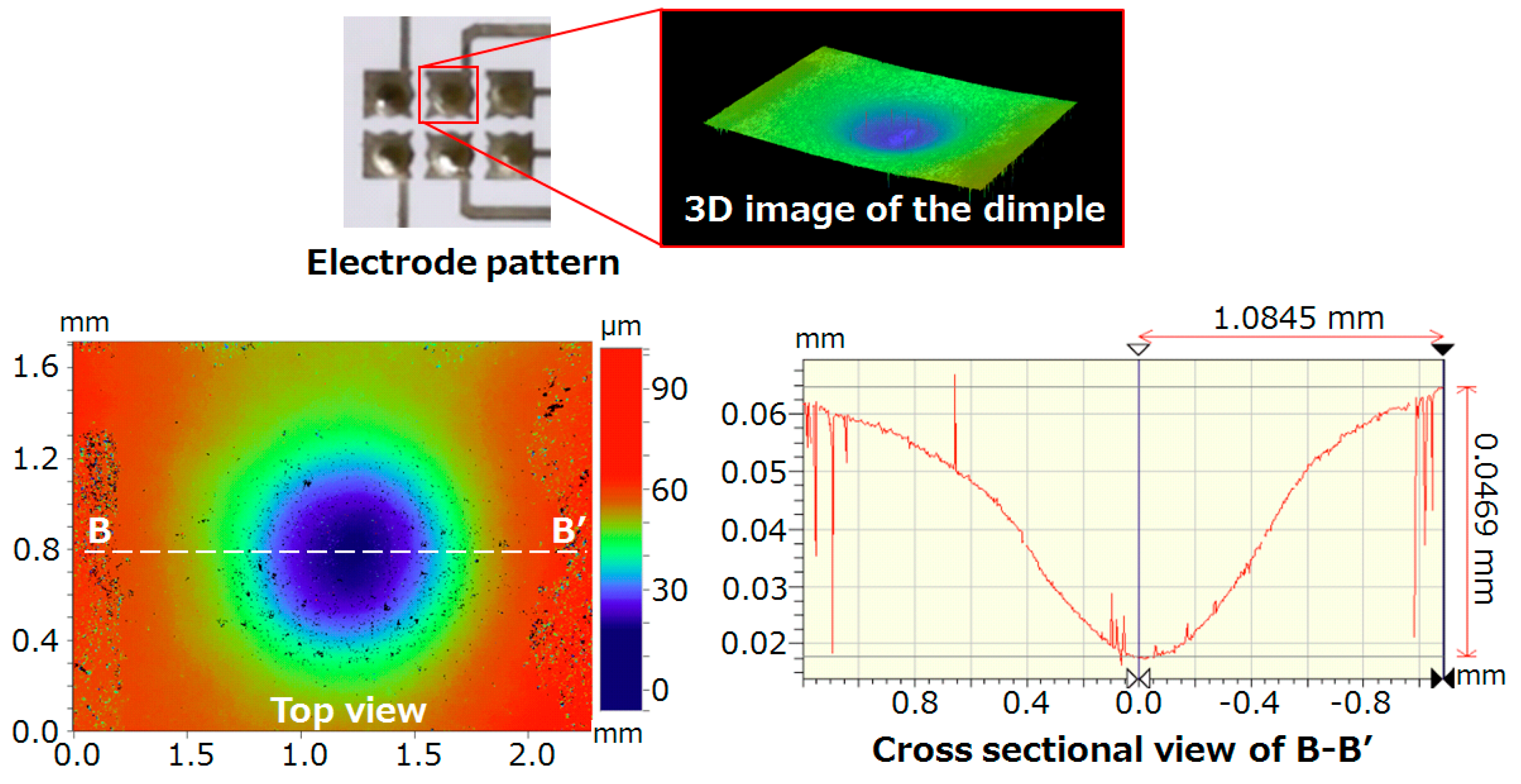
2.1. EWOD Device Fabrication
2.2. Effect Verification of the Dimple Structure
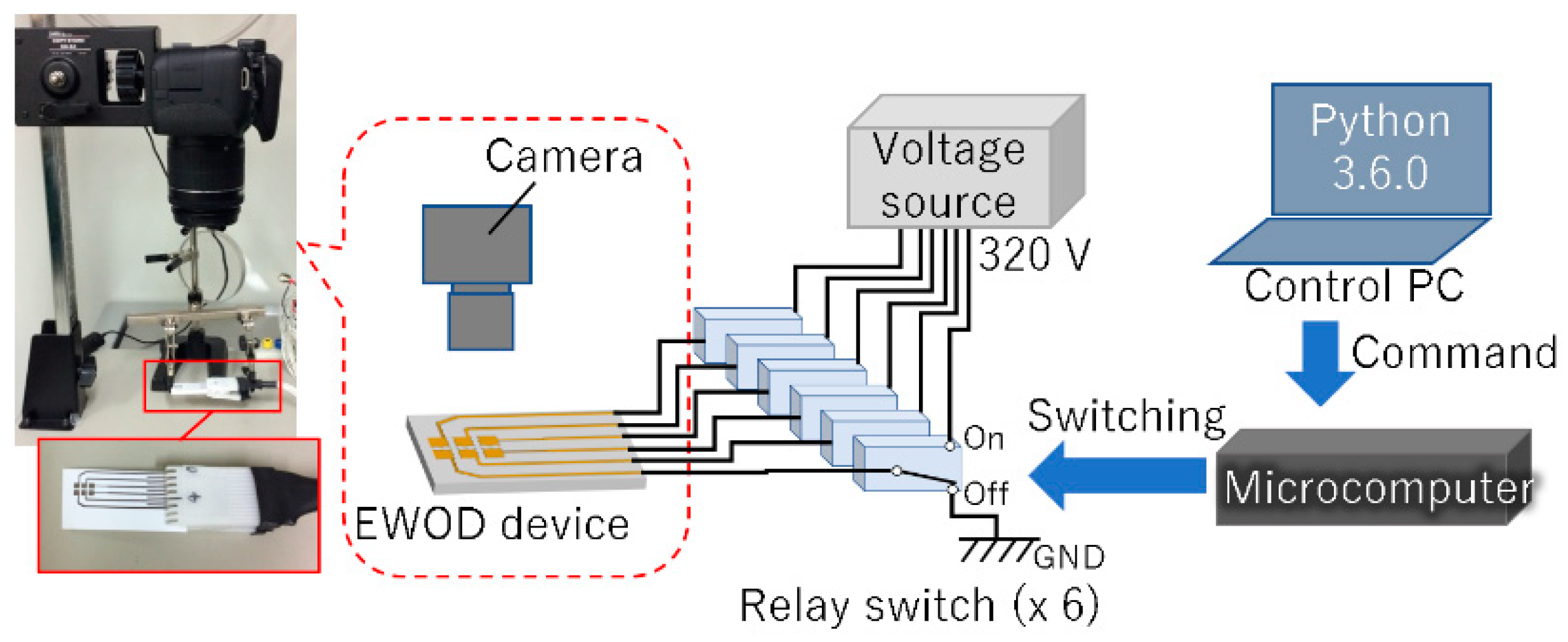
3. Experiments
3.1. Droplet Manipulation
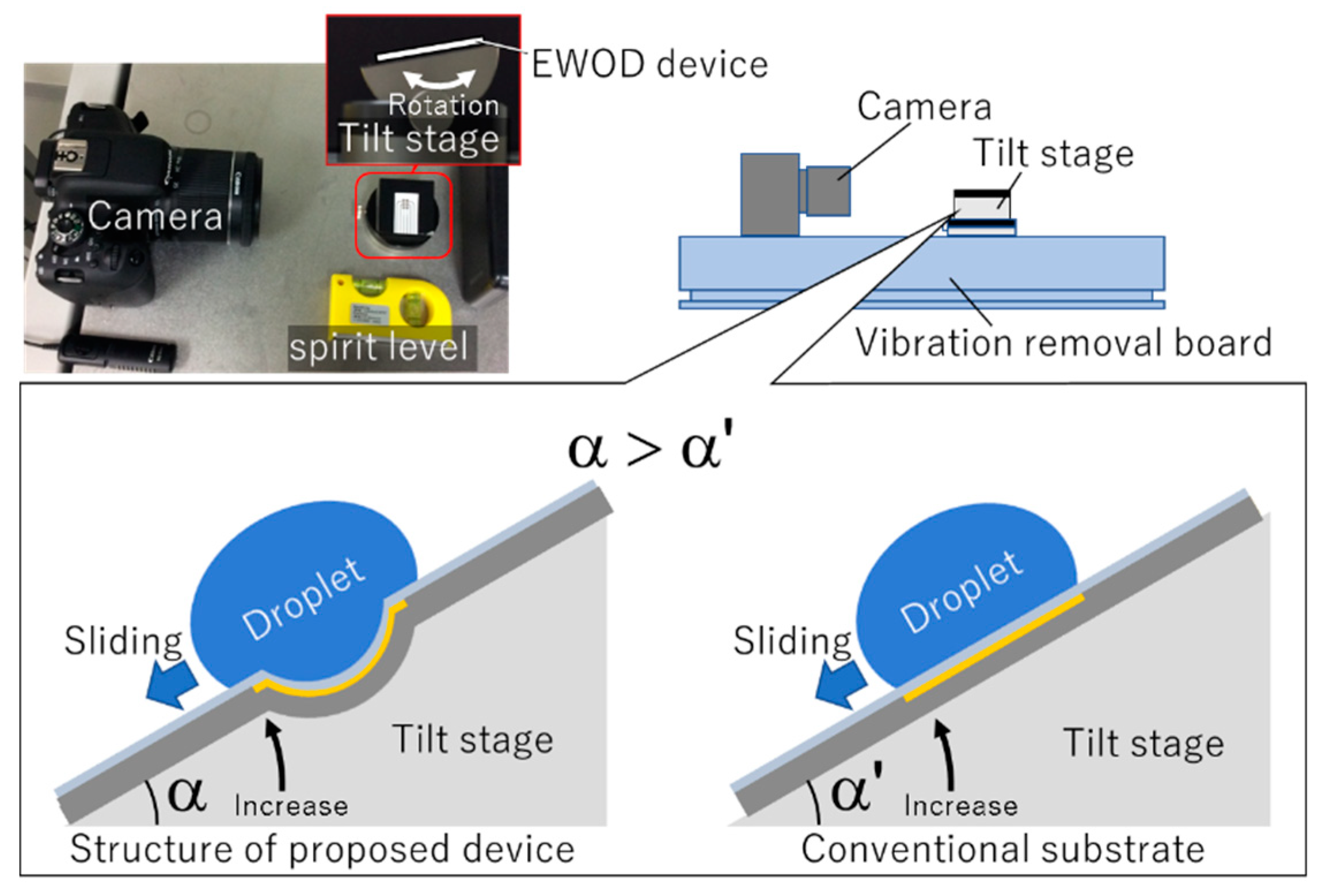
3.2. Sliding Experiment
4. Results and Discussion
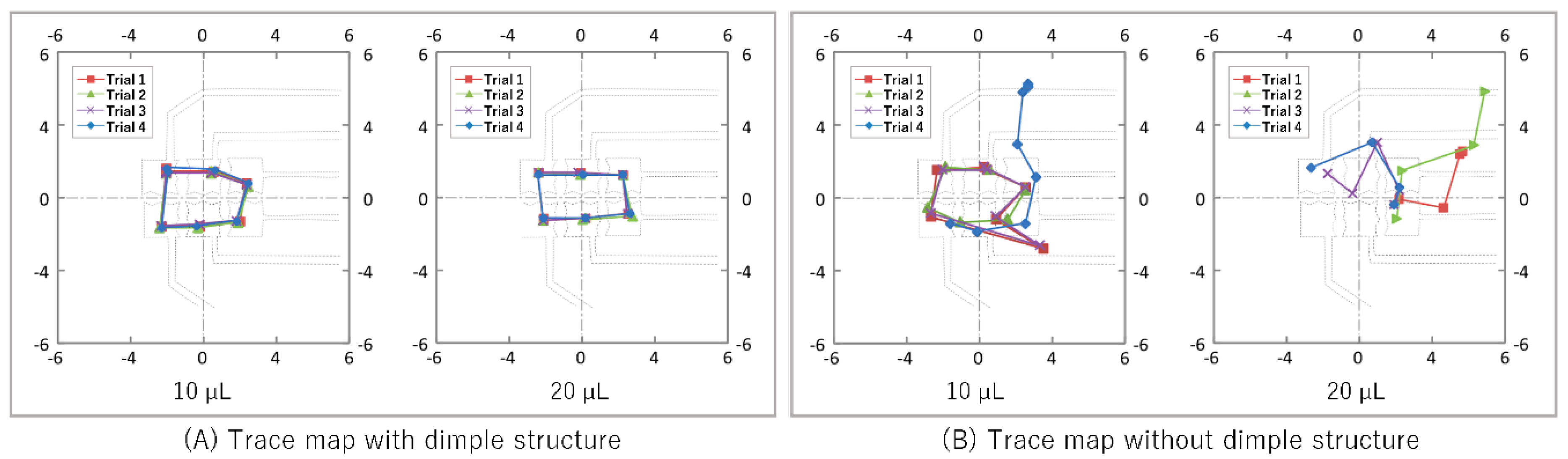
4.1. Droplet Manipulation
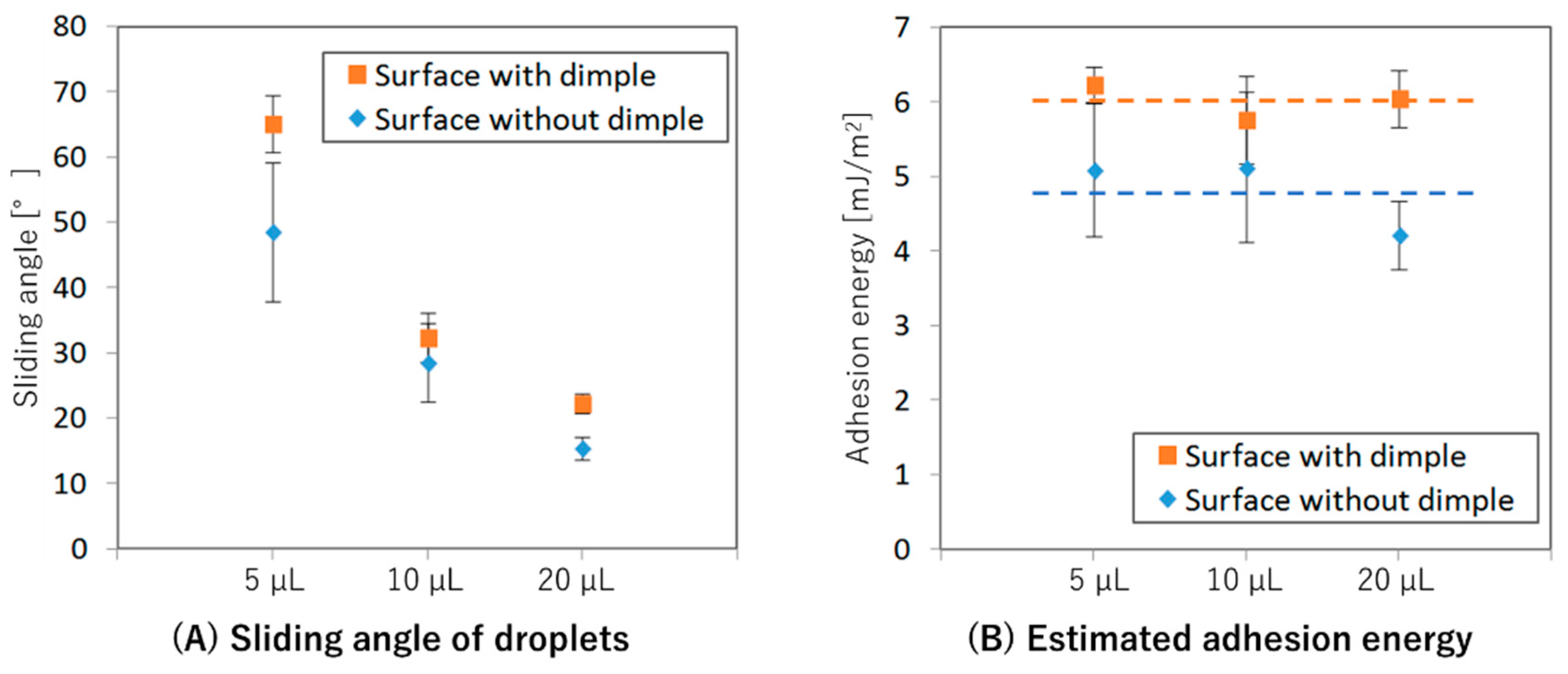
4.2. Sliding Experiment
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Csermely, P.; Korcsmaros, T.; Kiss, H.J.; London, G.; Nussinov, R. Structure and dynamics of molecular networks: A novel paradigm of drug discovery: A comprehensive review. Pharmacol. Ther. 2013, 138, 333–408. [Google Scholar] [CrossRef] [PubMed]
- Wohlgemuth, R. Biocatalysis-key to sustainable industrial chemistry. Curr. Opin. Biotechnol. 2010, 21, 713–724. [Google Scholar] [CrossRef] [PubMed]
- Saling, P. Industrial chemistry and chemoecology are linked together to realize a modern and sustainable chemistry. Chem. Cent. J. 2007, 1, 9. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Onuma, H.; Okubo, A.; Yokokawa, M.; Endo, M.; Kurihashi, A.; Sawahata, H. Rebirth of a dead belousov-zhabotinsky oscillator. J. Phys. Chem. A 2011, 115, 14137–14142. [Google Scholar] [CrossRef] [PubMed]
- Ceroni, A.; Maass, K.; Geyer, H.; Geyer, R.; Dell, A.; Haslam, S.M. Glycoworkbench: A tool for the computer-assisted annotation of mass spectra of glycans. J. Proteome Res. 2008, 7, 1650–1659. [Google Scholar] [CrossRef] [PubMed]
- Bernstein, F.C.; Koetzle, T.F.; Williams, G.J.; Meyer, E.F., Jr.; Brice, M.D.; Rodgers, J.R.; Kennard, O.; Shimanouchi, T.; Tasumi, M. The protein data bank: A computer-based archival file for macromolecular structures. J. Mol. Biol. 1977, 112, 535–542. [Google Scholar] [CrossRef]
- Gaulton, A.; Bellis, L.J.; Bento, A.P.; Chambers, J.; Davies, M.; Hersey, A.; Light, Y.; McGlinchey, S.; Michalovich, D.; Al-Lazikani, B.; et al. Chembl: A large-scale bioactivity database for drug discovery. Nucleic Acids Res. 2012, 40, D1100–D1107. [Google Scholar] [CrossRef]
- Walling, L.; Carramanzana, N.; Schulz, C.; Romig, T.; Johnson, M. Mixing in 384-well plates: Issues, measurements, and solutions. Assay Drug Dev. Technol. 2007, 5, 265–275. [Google Scholar] [CrossRef]
- Roda, A.; Manetta, A.C.; Portanti, O.; Mirasoli, M.; Guardigli, M.; Pasini, P.; Lelli, R. A rapid and sensitive 384-well microtitre format chemiluminescent enzyme immunoassay for 19-nortestosterone. Luminescence 2003, 18, 72–78. [Google Scholar] [CrossRef]
- Ackermann, U.; Lewis, J.S.; Young, K.; Morris, M.J.; Weickhardt, A.; Davis, I.D.; Scott, A.M. Fully automated synthesis of [(18) F]fluoro-dihydrotestosterone ([(18) F]FDHT) using the FlexLab module. J. Label. Comp. Radiopharm. 2016, 59, 424–428. [Google Scholar] [CrossRef]
- Whitesides, G.M. The origins and the future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Damiati, S.; Kompella, U.B.; Damiati, S.A.; Kodzius, R. Microfluidic devices for drug delivery systems and drug screening. Genes 2018, 9, 103. [Google Scholar] [CrossRef]
- Mogi, K.; Hayashida, K.; Yamamoto, T. Damage-less handling of exosomes using an ion-depletion zone in a microchannel. Anal. Sci. 2018, 34, 875–880. [Google Scholar] [CrossRef] [PubMed]
- Mogi, K. A visualization technique of a unique ph distribution around an ion depletion zone in a microchannel by using a dual-excitation ratiometric method. Micromachines 2018, 9, 167. [Google Scholar] [CrossRef] [PubMed]
- Thorsen, T.; Roberts, R.W.; Arnold, F.H.; Quake, S.R. Dynamic pattern formation in a vesicle-generating microfluidic device. Phys. Rev. Lett. 2001, 86, 4163–4166. [Google Scholar] [CrossRef] [PubMed]
- Mogi, K.; Sakata, K.; Hashimoto, Y.; Yamamoto, T. A Novel Fabrication Technique for Liquid-Tight Microchannels by Combination of a Paraffin Polymer and a Photo-Curable Silicone Elastomer. Materials 2016, 9, 621. [Google Scholar] [CrossRef]
- Chang, Y.H.; Lee, G.B.; Huang, F.C.; Chen, Y.Y.; Lin, J.L. Integrated polymerase chain reaction chips utilizing digital microfluidics. Biomed. Microdevices 2006, 8, 215–225. [Google Scholar] [CrossRef] [PubMed]
- Wheeler, A.R.; Moon, H.; Bird, C.A.; Loo, R.R.; Kim, C.J.; Loo, J.A.; Garrell, R.L. Digital microfluidics with in-line sample purification for proteomics analyses with maldi-ms. Anal. Chem. 2005, 77, 534–540. [Google Scholar] [CrossRef] [PubMed]
- Peng, C.; Zhang, Z.; Kim, C.J.; Ju, Y.S. Ewod (electrowetting on dielectric) digital microfluidics powered by finger actuation. Lab Chip 2014, 14, 1117–1122. [Google Scholar] [CrossRef] [PubMed]
- Gong, J.; Kim, C.J. All-electronic droplet generation on-chip with real-time feedback control for ewod digital microfluidics. Lab Chip 2008, 8, 898–906. [Google Scholar] [CrossRef] [PubMed]
- Soum, V.; Kim, Y.; Park, S.; Chuong, M.; Ryu, S.R.; Lee, S.H.; Tanev, G.; Madsen, J.; Kwon, O.S.; Shin, K. Affordable fabrication of conductive electrodes and dielectric films for a paper-based digital microfluidic chip. Micromachines 2019, 10, 109. [Google Scholar] [CrossRef] [PubMed]
- Fobel, R.; Kirby, A.E.; Ng, A.H.; Farnood, R.R.; Wheeler, A.R. Paper microfluidics goes digital. Adv. Mater. 2014, 26, 2838–2843. [Google Scholar] [CrossRef] [PubMed]
- Wolfram, E.; Faust, R. Liquid drops on a tilted plate, contact angle hysteresis and the young contact angle. In Wetting, Spreading and Adhesion; Padday, J.F., Ed.; Academic Press Inc.: London, UK, 1978; pp. 213–222. [Google Scholar]
- Jiang, L.; Feng, L. Wettability of the solid surface. In Bioinspired Intelligent Nanostructured Interfacial Materials; World Scientific Publishing Co Pte Ltd.: Singapore, 2010; pp. 107–163. [Google Scholar]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mogi, K.; Adachi, S.; Takada, N.; Inoue, T.; Natsume, T. Electrowetting on Dielectric (EWOD) Device with Dimple Structures for Highly Accurate Droplet Manipulation. Appl. Sci. 2019, 9, 2406. https://doi.org/10.3390/app9122406
Mogi K, Adachi S, Takada N, Inoue T, Natsume T. Electrowetting on Dielectric (EWOD) Device with Dimple Structures for Highly Accurate Droplet Manipulation. Applied Sciences. 2019; 9(12):2406. https://doi.org/10.3390/app9122406
Chicago/Turabian StyleMogi, Katsuo, Shungo Adachi, Naoki Takada, Tomoya Inoue, and Tohru Natsume. 2019. "Electrowetting on Dielectric (EWOD) Device with Dimple Structures for Highly Accurate Droplet Manipulation" Applied Sciences 9, no. 12: 2406. https://doi.org/10.3390/app9122406
APA StyleMogi, K., Adachi, S., Takada, N., Inoue, T., & Natsume, T. (2019). Electrowetting on Dielectric (EWOD) Device with Dimple Structures for Highly Accurate Droplet Manipulation. Applied Sciences, 9(12), 2406. https://doi.org/10.3390/app9122406