Abstract
Permanent magnet synchronous motors (PMSM) have been used in a lot of industrial fields. In this paper, a review of faults and diagnosis methods of PMSM is presented. Firstly, the electrical, mechanical and magnetic faults of the permanent magnet synchronous motor are introduced. Next, common fault diagnosis methods, such as model-based fault diagnosis, different signal processing methods, and data-driven diagnostic algorithms are enumerated. The research summarized in this paper mainly includes fault performance, harmonic characteristics, different time-frequency analysis techniques, intelligent diagnosis algorithms proposed recently and so on.
1. Introduction
The permanent magnet synchronous motor (PMSM) is an important type of synchronous motor. Compared with the conventional synchronous motor, its stator is also the symmetrical three-phase windings, but for its rotor, a special-shaped rare-earth permanent magnet is used instead of the field windings [1]. This means that the motor has a simple structure, small size, light weight and large overload capacity, which means that the PMSM is compact, efficient, and has a high torque density and high dynamic performance [2]. Because of these advantages, PMSM have been widely applied in many fields, such as manufacturing systems, electric vehicles [3], wind generators, ship propulsion engines and so on [4].
However, since the motor is working in the industrial environment with different stresses, affected by the power supply and load conditions, various faults will inevitably occur in the motor during the course of long-term continuous operation [5]. These faults can seriously affect the reliability and safety of the motor operation. If they cannot be diagnosed and corrected in time, it may cause serious equipment and property damage [6]. Therefore, it is especially important to study the fault detection and diagnosis technology of PMSM.
In this paper, a review of faults and diagnosis methods of PMSM is presented. In Section 2, the electrical fault, mechanical and magnetic faults of the permanent magnet synchronous motor are introduced. In Section 3, common fault diagnosis methods, such as model-based fault diagnosis, different signal processing methods, and data-driven intelligent diagnostic algorithms proposed recently are enumerated.
2. Fault Types
In general, according to the nature of the fault, common faults of the PMSM can be classified into electrical faults, mechanical faults and magnetic faults [7]. At the same time, there is a mutual catalytic relationship between them.
2.1. Electrical Faults
Electrical faults mainly involve the incorrect connection of the motor windings, grounding errors, short-circuit of stator phase windings, and the open-circuit of the whole phase [8].
Stator faults constitute 38% of all motor faults [9]. Among them, the inter-turn short circuit of the stator windings is the most common fault in PMSM [1,10]. As the running time increases, due to insulation wear, overheating or overload, there may be a breakdown of the stator winding insulation system in the motor, resulting in a short-circuit fault between the stator turns [11].
A short-circuit fault is tricky because it produces a great circulating current in the shorted path with excessive heat [12]. As a result, if not discovered and eliminated in time, it can damage more wire insulation and quickly propagate into more stator windings, which may cause the phase-to-phase fault, phase-to-ground faults and even demagnetization [13].
The internal stator winding failure may make one of the phases open-circuited [14], although this is often due to the problems of the drive system. It can cause large electromagnetic torque fluctuations and severe mechanical vibrations of the motor. Starting and running the fault PMSM without timely treatments can result in secondary damage and even the catastrophe of the entire system [15].
2.2. Mechanical Faults
Mechanical faults mainly involve damage to the magnet, bending of the shaft, loosening of the bolts, bearing faults, and air gap eccentricity.
Bearing faults, which contribute to almost 40–50% of all motor faults [16], occur due to environmental mechanical vibrations, shaft misalignment, poor lubrication, overload, corrosion and so on. Notably, bearings are inevitably fatigued, even during normal operation [17]. As the fatigue crack begins beneath the metal surface and propagates to the surface, a piece of metal breaks away and leave a small pit or flaking. This will result in bearing damage and failure [18], which can include a cage fault, inner raceway fault, outer raceway fault, and ball fault of the bearing [19]. The bearing damage can also cause other types of faults, such as air gap eccentricity, increased friction, and inter-turn short-circuit fault.
Eccentricity faults refer to the inconsistent air gap between the rotor and the stator. It is mainly caused by improper installation, lack or missing of the bolts, misalignment of the shaft, and rotor imbalance. Eccentricity faults include static eccentricity (SE) [20], dynamic eccentricity (DE) and mixed eccentricity (ME) [21]. When static eccentricity occurs, the centerline of the shaft is offset from the center of the stator by a constant value. When dynamic eccentricity occurs, the minimum distance of the air gap rotates with the rotation of the rotor. In the actual situation, these two phenomena often coexist, which leads to the mixed eccentricity.
Eccentricity faults can cause additional vibration, noise, torque ripple and so on [22]. And when the eccentric fault becomes severe, it will cause friction between the stator and the rotor, and damage the stator or rotor core [23], affecting the normal operation of the motor.
2.3. Magnetic Faults
The demagnetization fault is a unique fault of PMSM. Permanent magnets in the PMSM can be demagnetized by damage to the magnet, a high temperature, large stator currents, large short-circuit currents produced by inverter or stator faults, and the aging of the magnet itself [24]. The main source of this fault is armature reactions. During the normal operation of a PMSM, the stator current produces a reverse magnetic field that constantly resists the magnetic field of the permanent magnet [25]. During the course of long-term operation, this resistance will gradually cause demagnetization of the permanent magnet. When this demagnetization is on the entire magnetic pole, it is completely demagnetized. And partial demagnetization corresponds to the partial magnetic pole.
According to some studies [26,27], when the PMSM-specific demagnetization fault occurs, because of flux linkage ripples, the torque will be insufficient, causing the current increase to provide the required torque, which will raise the temperature and exacerbate the demagnetization in turn. At the same time, the fluctuation of the torque will also produce abnormal vibration and acoustic noise. They can reduce motor performance and efficiency [28], and have a negative effect on the normal operation of the PMSM.
3. Fault Diagnosis Methods
In general, the fault diagnosis flowchart of PMSM is as shown in Figure 1. All the fault diagnosis methods, in order to determine the fault type of an actual motor, need to acquire its signal data first. The acquired signals include current, vibration, and the like mentioned above, which are used for analysis after pretreatment such as denoising and amplification. Some researchers have studied the information fusion method for the data of multiple signal types or multiple sensors [29,30]. However, there are also some methods that use raw data directly without feature exaction and information fusion. At last, different diagnosis methods used to deal with these data were applied.
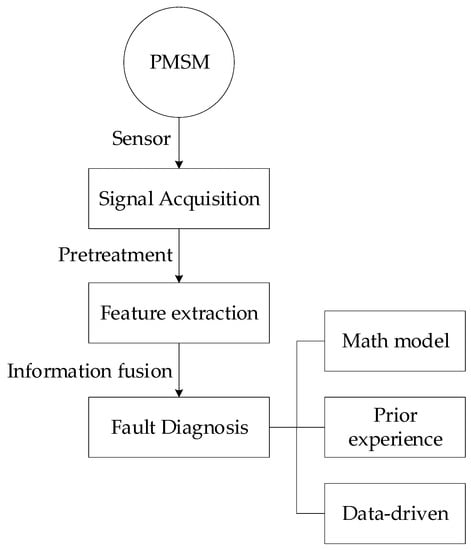
Figure 1.
Fault diagnosis flowchart of permanent magnet synchronous motor (PMSM).
In summary, commonly used motor fault diagnosis methods can be divided into the following three categories: model-based fault diagnosis methods [31], signal-based fault diagnosis methods, and knowledge-based fault diagnosis methods [32]. Among them, the model-based methods can penetrate the essence of fault generation. It can predict the signal performance after different faults occur in the motor and by comparing the actual output data with the output of the motor model it can determine the fault type. Signal-based methods are most commonly used to process and extract different features from the motor signals, and these features are then manually diagnosed using prior experience or using knowledge-based methods. Knowledge-based methods can automatically determine the fault state based on expert knowledge, but due to the research in artificial intelligence and machine learning, data-driven intelligent diagnosis systems [33], which do not rely on the prior knowledge, have demonstrated broad application prospects recently. The motor data can be used for the training of a machine learning model.
3.1. Model-based Fault Diagnosis Methods
The idea of the model-based fault diagnosis method is to establish a motor model containing a certain fault based on physical principles, and to compare the model predicted output with the actual detected output to determine whether the fault has occurred in the motor. The model itself can also be used in the simulation of other diagnostic methods.
This method can penetrate the internal laws and physical nature of motor faults but requires quite a high accuracy of the motor model. Commonly used models include analytical mathematical models, magnetic equivalent circuit (MEC) models and digital simulation models, which were compared by Usman et al. [34].
The basic mathematical models in the abc reference frame of healthy three-phase PMSMs [35] and multiphase PMSMs [36] have been built. When the inter-turn short circuit occurs in the phase a of the motor, some parameters in the voltage equation and the magnetic equation will change. By adding the resistance and inductance of the short circuit, the motor model can be modified [37]. Similar motor model was also established in the [38] and dq reference frame [39]. However, this model is based on the electrical equivalent circuit (EEC), which is fast but less accurate. Therefore, it is limited to the study of the inter-turn short circuit fault.
As a field-based analysis method, discrete winding distributions, stator slots and the like can be analyzed based on the MEC model, so some researchers also use it for the diagnosis of electrical faults [40,41]. In this model, the magnetic fluxes in all branches and potentials can be determined by solving the MEC equations. The accuracy of the MEC models is higher than the EEC models, but not as good as the digital simulation models, which were the most widely used models in the fault diagnosis of PMSM, such as the finite element model (FEM). Therefore, some researchers have tried to present a coupling between FEM and MEC [42].
FEM has been commonly used for almost all PMSM faults [43,44,45], including the inter-turn short circuit, eccentricity and demagnetization. This is because by finite element field calculation, both physical and geometric details can be taken into account and various types of mechanical failure can be modeled [46]. The finite element model can simulate more accurate machine information than an analytical model with linear parameters. Compared to other models, it has the highest accuracy and the highest computational cost [47]. For fault diagnosis, Haddad and Strangas used finite element analysis to established models of PMSM with different faults and compared them with the experimental data from fault motor, and the amplitude of the harmonics was selected as the identification basis [48].
3.2. Signal Processing Methods
The motor integrates electrical and mechanical components. Therefore, when faults occur, some complicated fault phenomena may occur. There are electrical quantities such as voltage, frequency, current, power and so on, as well as non-electrical quantities such as heat, sound, light, gas, radiation, vibration and so on. Processing the signals obtained from the motor is one of the commonly used methods of fault detection. These methods can identify the performance of faults and extract fault features from the signals, which mainly include current [49], vibration [50] and so on. Motor current signal analysis (MCSA) [51] has been extensively studied, and there are also some researchers who have combined different signals to build a PMSM fault diagnosis system [52,53].
3.2.1. Frequency Domain Methods
In general, signal processing methods typically include time domain methods, frequency domain methods, and time-frequency analysis methods. Time domain statistical indicators are used as fault characteristics in the initial period of fault diagnosis technology development, such as mean, peak, root mean square, kurtosis values, etc. [18]; however, they are not accurate enough. The classical method of frequency domain analysis is fast Fourier transform (FFT). The Fourier transform represents a signal as a superposition of several sine or cosine functions. It can clearly show the frequency distribution of the signal, where the amplitude and frequency of harmonic components can be used as the features of different faults [54]. The harmonic features of different faults in current and vibration signals are as follows.
(1) Current
The inter-turn short circuit fault can lead to PMSM stator current imbalance and amplitude change [55]. When the winding is short-circuited, in addition to the amplitude of the fundamental frequency, the amplitude of the high frequency harmonics of the current increases. Let be the frequency of the power supply, k be a positive integer. z is the number of stator slots, and p is the number of pole pairs. Thus, the harmonics at the following frequencies will increase [56]:
Among them, the most obvious feature is the increase of the third harmonic amplitude [57]. Furthermore, Jun proposed a three-phase current balance indicator [58] which is:
where , and are the fundamental frequency amplitudes of the three-phase current, respectively.
As for the mechanical faults, they will cause distortions in the flux distribution inside the motor, and will also lead to some current harmonics in the stator current in turn [59]. According to the research of Bashir et al. [21], the characteristic frequencies for eccentric faults of PMSM is as follows:
Furthermore, according to the research of Ebrahimi et al. [60], the harmonic at is more related to static eccentricity faults, while the harmonic at is related to both static eccentricity and dynamic eccentricity.
In addition, when a demagnetization fault occurs, the distributed magnetomotive force (MMF) will not be sinusoidal. Therefore, the normal and failed portions of the MMF will together produce current with multiple frequencies, which means, if there is demagnetization, low frequency components will appear near the fundamental wave in the current signal [61]. Thus, the harmonic frequencies that can be used as characteristic frequencies for demagnetization faults are as follows [62]:
As can be seen, unlike asynchronous motors, the above fault pattern does not depend on slip, which means that for all types of faults, features could appear at the same point in the current spectrum. To solve this problem, according to the research of Goktas et al. [63], 0.25th, 0.5th and 0.75th harmonics are the ideal indicators to separate a demagnetization fault from the static eccentricity fault.
(2) Vibration
When the motor is running normally, the stator vibration frequency should be twice the frequency of the power supply. But inter-turn short-circuit fault and three-phase asymmetry of the motor windings will cause magnetic field asymmetry, resulting in abnormal vibration, which will produce the harmonic components of and in addition to the fundamental frequency of in the vibration [64].
As for the mechanical faults, the method based on vibration signal is widely considered the most effective one. That is because when a local mechanical failure occurs in the motor, it comes into contact with another part of the machine and produces a shock pulse in the vibration [65]. For faults in different parts of the bearing, the corresponding characteristic frequency is as follows [19]:
where represents the rotor frequency, represents inner raceway fault frequency, represents outer raceway fault frequency, represents ball fault frequency, represents the cage fault frequency, represents ball diameter, represents pitch diameter, represents number of rolling elements, and represents ball contact angle.
3.2.2. Short-time Fourier Transform
With the frequency domain methods, time information is lost, and sometimes it is difficult to accurately distinguish similar harmonics. Therefore, many time-frequency analysis techniques have been proposed, each of which have their own advantages and disadvantages.
Short-time Fourier transform (STFT) is an improved method based on FFT. It realizes time-frequency analysis by dividing the signal into small time windows, whose types include rectangle, Hamming, Hanning, Gauss and so on. For an input signal , the discrete expression of STFT is [66]:
where is the window function, k represents the frequency index, N represents the number of FFT points; m represents the position of window, and H represents the jump distance between two consecutive windows.
This method is advantageous for dealing with nonlinear complex signal. However, the time and frequency resolution depend on the selected window, but as can be seen from the formula, the time window size H is fixed, so the resolution is fixed over the entire time and frequency range, and their resolution cannot be accurate at the same time. If great resolution is expected, STFT requires a high computational cost; thus, as a basic time-frequency analysis method, STFT is not the most suitable for transient analysis. According to the research of Strangas et al., STFT performs the worst in several time-frequency analysis techniques [67]. Therefore, Rosero et al. combined the STFT and Gabor spectra to analyze the PMSM current signal [68].
3.2.3. Wavelet Transform
Wavelet transform (WT) includes discrete wavelet transform (DWT), continuous wavelet transform (CWT) and so on. Its process is to generate wavelet coefficients by convolving the input signal with the mother wavelet function [69], which is the window function. The scaling factor a and displacement factor b of the mother wavelet function are related to frequency and time, respectively. Thus, its expression is as follows:
When is compared with STFT, the window size a and b of WT can vary with the frequency. Therefore, with WT, the signal can be decomposed into signals at different frequency bands with different resolutions, which makes it suitable for accurate and flexible fault detection of PMSM [9]. Rosero et al. have evaluated the degree of demagnetization of PMSM by calculating the energy in the detail of DWT [61]. And they also focused on mechanical faults [70]. Obeid et al. used the method based on WT to identify the short circuit winding phase in PMSM [71].
However, wavelet analysis cannot further decompose the high-frequency bands of the signal, but the fault characteristics of motors often appear at high frequencies. In order to overcome this shortcoming, wavelet packet transform (WPT) [72] was proposed. An-ping et al. have used the wavelet packet band energy analysis method to extract the characteristics of the PMSM inter-turn short circuit fault [73], which is to accurately divide the frequency band of the current signal by WPT, and consider the signal energy of the appropriate frequency bands as the feature vector of the fault. A suitable mother wavelet function will make the WT more sensitive to transient shocks, which is also a limit: the results of the analysis are strongly related to the choice of the mother wavelet function. Besides, like STFT, it is also impossible to have high accuracy in both time and frequency at a certain frequency band.
3.2.4. Hilbert-Huang Transform
The Hilbert-Huang transform (HHT) is a time-frequency analysis technique that combines empirical mode decomposition (EMD) with Hilbert transform. The signal is first decomposed into multiple internal mode functions (IMF) by EMD, each of which is a single component function. Then the Hilbert transform is used to calculate the instantaneous frequency of the original signal from the IMF [74]. Unlike the Fourier transform, the expression of the Hilbert transform for an input is:
Obviously, the Hilbert transform is equal to the convolution of with . This method overcame the shortcoming of STFT and WT, which is their time-frequency resolution is closely related to the selection of window size or window function. Based on HHT, Urresty et al. calculated the Hilbert energy spectrum of PMSM current to detect the stator short circuit fault [56]. In addition, HHT is suitable for dynamic signal analysis due to its sensitivity to transient frequencies. In the research of Espinosa et al. [75], HHT was applied to diagnose the demagnetization fault, and the results showed that there were still good results in high-speed and dynamic operating conditions.
3.2.5. Wigner-Ville Distribution
For an input signal , the definition of Wigner-Ville distribution (WVD) is:
where is the transient correlation. As can be seen, WVD is a time–frequency energy density which is obtained by correlating with a time and frequency translation of itself. According to the study [68], the joint time and frequency resolution provided by the WVD is the best, better than other time-frequency analysis methods and its calculation cost is not high. However, if the signal to be analyzed contains more than one frequency component, the result of WVD will be subject to cross-term interference, which is undoubtedly quite unfavorable for fault diagnostic. To solve this problem, some researchers have combined WVD with EMD, included in HHT, to analyze the current by analyzing the demodulated IMF with WVD [76,77]. Besides, Rosero et al. used a smoothed pseudo Wigner Ville distribution (SPWVD) and Zao-Atlas-Marks distribution (ZAM), which can eliminate interference in WVD-based PMSM fault diagnosis [78,79]. Even so, its application on PMSM remains to be further studied.
3.3. Data-driven Intelligent Diagnosis Algorithm
Traditional artificial intelligence algorithms rely on prior knowledge. For instance, the rule basis of fuzzy logic (FL) can be based on the experience of experts about PMSM faults [80]. Due to research in artificial intelligence and machine learning, many data-driven intelligent diagnosis algorithms have been proposed recently. Basic data-driven approaches include some statistical methods, such as principal component analysis (PCA) [81] and independent component analysis (ICA) [82], which are also used in feature exaction for fault diagnosis. But with the data-driven intelligent diagnosis algorithms, the fault type and severity of the motor can be automatically identified by the input data based on the given training data. These methods mainly include the neural network, support vector machine, sparse representation, deep learning and so on.
3.3.1. Neural Network
Neural networks (NN), or artificial neural networks (ANN), have been proposed with the development of artificial intelligence, which have been widely used in the fields of pattern recognition, automatic control etc., as well as fault diagnosis [83]. NN can simulate the human brain and automatically identify the fault type. Traditional neural network models generally consist of an input layer, a hidden layer and an output layer; each layer containing many nodes [84]. The output is obtained from the activation function after calculation of fully connected nodes from multiple layers.
The goal of NN is to minimize the classification errors on the training set and to react appropriately to new inputs, which requires adjusting the initial values of the parameters and training the network multiple times. Therefore, different training algorithms and network models are used in fault diagnosis studies, such as back-propagation (BP) network [85], dynamic recurrent NN [86] and so on. Ebrahimi trained feed-forward perceptron ANNs for the static eccentricity fault of PMSM [87]. Çira et al. used the third harmonic in the PMSM current as the input to the ANN to achieve a good diagnosis result for the inter-turn short circuit [88]. However, it also has the disadvantage of relying on a large amount of input data, easy over-fitting, “black box” and so on.
3.3.2. Support Vector Machine
The support vector machine (SVM), a commonly used machine learning theory, was proposed by Vapnik in 1999 [89], whose main idea was to maximize the distance between training data and a decision boundary in the feature space. The decision boundary can be formed by separating the hyperplane and the training vectors closest to the decision boundary, which are called the support vectors, in order determine its position. Suppose the input of training samples is and the output is , the purpose of SVM is to solve the following problem:
Compared with NN, SVM is more suitable for small sample classification. However, the basic model of SVM can only be used to solve the two-class problem. To meet practical needs, B.M. Ebrahimi et al. used one-versus-all SVMs for the PMSM inter-turn short circuit fault classification [90]. Furthermore, wavelet SVM is considered to be well suited for complex mechanical fault signals [91]. And D. Renjie et al. used support vector regression (SVR) to map the feature vectors from current and torque into the different demagnetization levels of PMSM [92]. Furthermore, since the performance of SVM depends largely on the choice of SVM parameters, parameter optimization algorithms, such as particle swarm optimization (PSO) [93], should also be noted.
3.3.3. Sparse Representation
Sparse representation is a new theory which is the most representative methodology of linear representation methods. It can express the essential characteristics of the signals while compressing them, so it can de-noise, anti-interference and reduce the data space. Its principle is to use the sparse linear combination of overcomplete dictionary atoms to represent the original signal [94].
For an input signal of length n, the expression of the sparse representation is:
where is the dictionary matrix, the column vector is the dictionary atom and . is the sparse representation coefficient of the original signal. It can be seen from the above that the method of sparse representation mainly includes dictionary design [95,96] and sparse coefficient solving. Wright also developed a sparse representation classification (SRC) in the field of face recognition [97] by using training data as the dictionary to compare the residuals of different categories data and input data. It extends the application scope of sparse representation.
In the field of fault diagnosis, sparse representation has been used in signal denoising, feature extraction and fault classification in recent years. Hou et al. used the matching pursuit (MP) algorithm [98] to obtain the largest N sparse coefficients of PMSM with different faults and considered them as the features [99]. Based on this, Liang et al. used the orthogonal matching pursuit (OMP) algorithm [100] and sent the feature vectors into SVM [101]. As for classification, SRC is not as accurate as SVM, although it is faster. Therefore, a joint model for bearing fault diagnosis which combined SRC with SVM was proposed by Ren et al. [102].
3.3.4. Deep Learning
Before using a machine learning classification algorithm such as SVM, it is usually necessary to extract feature vectors as the input by using a signal processing method such as WT. However, for the deep learning method proposed in recent years, it can automatically learn the ability to represent and classify raw data with features [103], which can reflect the deep features of the original data. Deep learning models used in the field of fault diagnosis includes deep stacking network (DSN) [104], deep belief networks (DBN) [105], long short-term memory (LSTM) [106] and so on. Among them, the most commonly used method is convolutional neural networks (CNNs).
CNNs usually consist of convolutional layers, ReLU layers, pooling layers, and a fully-connected layer. In the training process, the input samples are forwardly propagated for feature learning and classification, and the errors are reversely propagated until the model is finally completed. It is a bite like NN but can reduce the tendency to overfit.
Since CNN is a method developed in image processing, some researchers first converted the features extracted by time-frequency analysis technology into two-dimensional, and then input them into 2D-CNN for diagnosis [107]. Wen et al. proposed a method to convert the raw time-domain signal data into 2-D gray images, which eliminates the need for additional feature extraction steps [108]. According to their comparison, the CNN-based fault diagnosis algorithm is more accurate than the sparse filter, DBN and SVM. However, it has the disadvantage of being too time consuming and has high hardware requirements. On the other hand, Ince et al. directly input the time domain signal collected in the motor into the 1D-CNN for fault diagnosis [109]. I-Hsi Kao et al. compared this method with the method of using WPT to extract features and then inputting them into ANN. The results show that CNN has a slightly better accuracy in the fault diagnosis of PMSM [110]. Therefore, research on fault diagnosis algorithms for PMSM based on deep learning is promising.
4. Discussion
This paper describes the types of PMSM faults and the three types of fault detection and diagnostic methods, where many existing studies is summarized. Compared with the existing PMSM fault diagnosis review, some new research methods and conclusions have been added, especially the data-driven intelligent diagnosis algorithms. Deep learning has become a hot topic in recent years due to its high intelligence. But it has higher requirements for hardware. Although data can be correctly classified through deep learning, people do not clearly know the internal laws and essential characteristics of the data. As for SRC, because a training process is not required, its speed is faster, but its application in motor signal processing and fault diagnosis still needs further research. At the same time, SVM is still widely used in the case of a low computational time and small sample of data, and more research on multi-classification algorithms and ensemble learning algorithms is underway. Therefore, signal processing algorithms are still a fundamental and important area of research in order to extract more diverse and precise features.
In a word, this paper can be used as a reference for PMSM fault diagnosis studies in the future. As the requirements for the accuracy and intelligence of fault diagnosis increase, the methods mentioned in this paper will play an important role in future research.
Author Contributions
Conceptualization, W.L., Y.C. and S.L.; Writing-Original Draft Preparation, S.L., W.L., and H.L.; Writing—Review & Editing, S.L., W.L. and Y.C.; visualization, Y.C. and C.W.; supervision, Y.C. and C.W.; project administration, Y.C. and C.W.; Funding Acquisition, Y.C. and C.W.
Funding
This research was funded by the National Key R&D Plan Program of China (2018YFB0106100), the Sichuan Science and Technology support Program (2019YFG0352, 2017GZ0395 and 2017GZ0394), and the Central University basic Research Business funds (ZYGX2016J140 and ZYGX2016J146).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mazzoletti, M.A.; Bossio, G.R.; De Angelo, C.H.; Espinoza-Trejo, D.R. A Model-Based Strategy for Interturn Short-Circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Marcic, T.; Stumberger, B.; Stumberger, G.; Hadziselimovic, M.; Virtic, P.; Dolinar, D. Line-Starting Three- and Single-Phase Interior Permanent Magnet Synchronous Motors—Direct Comparison to Induction Motors. IEEE Trans. Magn. 2008, 44, 4413–4416. [Google Scholar] [CrossRef]
- Zheng, J.; Wang, Z.; Wang, D.; Li, Y.; Li, M. Review of fault diagnosis of PMSM drive system in electric vehicles. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 7426–7432. [Google Scholar]
- Kalimov, A.; Shimansky, S. Optimal Design of the Synchronous Motor with the Permanent Magnets on the Rotor Surface. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Karami, M.; Misron, N.; Radzi, M.A.M. Statistical features analysis of transient current signal for broken bars fault detection in LS-PMSMs. In Proceedings of the 2015 IEEE 3rd International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA), Kuala Lumpur, Malaysia, 24–25 November 2015; pp. 1–6. [Google Scholar]
- Zafarani, M.; Bostanci, E.; Qi, Y.; Goktas, T.; Akin, B. Interturn Short-Circuit Faults in Permanent Magnet Synchronous Machines: An Extended Review and Comprehensive Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2173–2191. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, J.; Huiping, Y.; Zhou, W. A review of Permanent Magnet Synchronous Motor fault diagnosis. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Moosavi, S.S.; Esmaili, Q.; Djerdir, A.; Amirat, Y.A. Inter-Turn Fault Detection in Stator Winding of PMSM Using Wavelet Transform. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–5. [Google Scholar]
- Cira, F.; Arkan, M.; Gumus, B.; Goktas, T. Analysis of stator inter-turn short-circuit fault signatures for inverter-fed permanent magnet synchronous motors. In Proceedings of the IECON 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 1453–1457. [Google Scholar]
- Liang, Y. Diagnosis of inter-turn short-circuit stator winding fault in PMSM based on stator current and noise. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Busan, South Korea, 26 February–1 March2014; pp. 138–142. [Google Scholar]
- Kim, K. Simple Online Fault Detecting Scheme for Short-Circuited Turn in a PMSM Through Current Harmonic Monitoring. IEEE Trans. Ind. Electron. 2011, 58, 2565–2568. [Google Scholar] [CrossRef]
- Kim, K.C.; Lim, S.B.; Koo, D.H.; Lee, J. The Shape Design of Permanent Magnet for Permanent Magnet Synchronous Motor Considering Partial Demagnetization. IEEE Trans. Magn. 2006, 42, 3485–3487. [Google Scholar] [CrossRef]
- Welchko, B.A.; Jahns, T.M.; Hiti, S. IPM synchronous machine drive response to a single-phase open circuit fault. IEEE Trans. Power Electron. 2002, 17, 764–771. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Cheng, M. Detection and Discrimination of Open Phase Fault in Permanent Magnet Synchronous Motor Drive System. IEEE Trans. Power Electron. 2016, 31, 4697–4709. [Google Scholar] [CrossRef]
- Zhongming, Y.; Bin, W. A Review on Induction Motor Online Fault Diagnosis. In Proceedings of the IPEMC Third International Power Electronics and Motion Control Conference (IEEE Cat. No.00EX435), Beijing, China, 15–18 August 2000; pp. 1353–1358. [Google Scholar]
- Rosero, J.A.; Cusido, J.; Garcia, A.; Ortega, J.A.; Romeral, L. Broken Bearings and Eccentricity Fault Detection for a Permanent Magnet Synchronous Motor. In Proceedings of the IECON 32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; pp. 964–969. [Google Scholar]
- Niu, X.; Zhu, L.; Ding, H. New statistical moments for the detection of defects in rolling element bearings. Int. J. Adv. Manuf. Technol. 2005, 26, 1268–1274. [Google Scholar] [CrossRef]
- Stack, J.R.; Harley, R.G.; Habetler, T.G. An Amplitude Modulation Detector for Fault Diagnosis in Rolling Element Bearings. IEEE Trans. Ind. Electron. 2004, 51, 1097–1102. [Google Scholar] [CrossRef]
- Karami, M.; Mariun, N.; Mehrjou, M.R.; Ab Kadir, M.Z.A.; Misron, N.; Mohd Radzi, M.A. Diagnosis of static eccentricity fault in line start permanent magnet synchronous motor. In Proceedings of the 2014 IEEE International Conference on Power and Energy (PECon), Kuching, Malaysia, 1–3 December 2014; pp. 83–86. [Google Scholar]
- Ebrahimi, B.M.; Javan Roshtkhari, M.; Faiz, J.; Khatami, S.V. Advanced Eccentricity Fault Recognition in Permanent Magnet Synchronous Motors Using Stator Current Signature Analysis. IEEE Trans. Ind. Electron. 2014, 61, 2041–2052. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J.; Roshtkhari, M.J. Static-, Dynamic-, and Mixed-Eccentricity Fault Diagnoses in Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2009, 56, 4727–4739. [Google Scholar] [CrossRef]
- Abdelli, R.; Bouzida, A.; Touhami, O.; Ouadah, M. Static eccentricity fault modeling in permanent-magnet synchronous motors. In Proceedings of the 8th International Conference on Modelling, Identification and Control (ICMIC-2016), University of MEDEA, Algiers, Algeria, 15–17 November 2016; pp. 364–368. [Google Scholar]
- Ishikawa, T.; Seki, Y.; Kurita, N. Analysis for Fault Detection of Vector-Controlled Permanent Magnet Synchronous Motor with Permanent Magnet Defect. IEEE Trans. Magn. 2013, 49, 2331–2334. [Google Scholar] [CrossRef]
- Gritli, Y.; Rossi, C.; Casadei, D.; Zarri, L.; Filippetti, F. Demagnetizations diagnosis for Permanent Magnet Synchronous Motors based on advanced Wavelet Analysis. In Proceedings of the 2012 International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 2397–2403. [Google Scholar]
- Ruoho, S.; Kolehmainen, J.; Ikaheimo, J.; Arkkio, A. Interdependence of Demagnetization, Loading, and Temperature Rise in a Permanent-Magnet Synchronous Motor. IEEE Trans. Magn. 2010, 46, 949–953. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, W.; Kar, N.C. Torque-Ripple-Based Interior Permanent-Magnet Synchronous Machine Rotor Demagnetization Fault Detection and Current Regulation. IEEE Trans. Ind. Appl. 2017, 53, 2795–2804. [Google Scholar] [CrossRef]
- Haylock, J.A.; Hoefer, U.M.; Jack, A.G. Predicting and preventing demagnetisation in permanent magnet motor drives. In Proceedings of the 3rd IET International Conference on Power Electronics, Machines and Drives, Dublin, Ireland, 4–6 April 2006; pp. 474–478. [Google Scholar]
- Liu, Z.; Guo, W.; Tang, Z.; Chen, Y. Multi-Sensor Data Fusion Using a Relevance Vector Machine Based on an Ant Colony for Gearbox Fault Detection. Sensors 2015, 15, 21857–21875. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, W.; Kar, N.C. Multi-Sensor Fusion-Based Permanent Magnet Demagnetization Detection in Permanent Magnet Synchronous Machines. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar] [CrossRef]
- Chowdhury, M.H. Modeling of faults in permanent magnet synchronous machines. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Busan, South Korea, 1–4 June 2016; pp. 246–250. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part II: Fault Diagnosis with Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Usman, A.; Joshi, B.M.; Rajpurohit, B.S. Review of fault modeling methods for permanent magnet synchronous motors and their comparison. In Proceedings of the IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 141–146. [Google Scholar]
- Obeid, N.H.; Boileau, T.; Nahid-Mobarakeh, B. Modeling and Diagnostic of Incipient Inter-turn Faults For a Three Phase Permanent Magnet Synchronous Motor. In Proceedings of the IEEE Industry Application Society Annual Meeting, Vancouver, BC, Canada, 5–9 October 2014; pp. 1–8. [Google Scholar]
- Yassa, N.; Rachek, M.; Djerdir, A.; Becherif, M. Detecting of Multi Phase Inter Turn Short Circuit in the Five Permanent Magnet Synchronous Motor. Int. J. Emerg. Electr. Power Syst. 2016, 17, 583–595. [Google Scholar] [CrossRef]
- Romeral, L.; Urresty, J.C.; Riba Ruiz, J.; Garcia Espinosa, A. Modeling of Surface-Mounted Permanent Magnet Synchronous Motors with Stator Winding Interturn Faults. IEEE Trans. Ind. Electron. 2011, 58, 1576–1585. [Google Scholar] [CrossRef]
- Vaseghi, B.; Nahid-Mobarakeh, B.; Takorabet, N.; Meibody-Tabar, F. Modeling of Non-Salient PM Synchronous Machines under Stator Winding Inter-turn Fault Condition: Dynamic Model—FEM Model. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 635–640. [Google Scholar]
- Peter, H.; Hahn, I. Model based rotor angle fault detection in PM synchronous machines. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 44–49. [Google Scholar]
- Faiz, J.; Nejadi-Koti, H.; Exiri, A.H. Inductance-based Inter-Turn Fault Detection in Permanent Magnet Synchronous Machine Using Magnetic Equivalent Circuit Model. Electr. Power Compon. Syst. 2017, 45, 1016–1030. [Google Scholar] [CrossRef]
- Gandhi, A.; Corrigan, T.; Parsa, L. Recent Advances in Modeling and Online Detection of Stator Interturn Faults in Electrical Motors. IEEE Trans. Ind. Electron. 2011, 58, 1564–1575. [Google Scholar] [CrossRef]
- Nedjar, B.; Vido, L.; Hlioui, S.; Amara, Y.; Gabsi, M. Hybrid coupling: Magnetic equivalent circuit coupled to finite element analysis for PMSM electromagnetic modeling. In Proceedings of the IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 858–862. [Google Scholar]
- Fitouri, M.; BenSalem, Y.; Abdelkrim, M.N. Analysis and co-simulation of permanent magnet sychronous motor with short-circuit fault by finite element method. In Proceedings of the 13th International Multi-Conference on Systems, Signals & Devices (SSD), Leipzig, Germany, 31–24 March 2016; pp. 472–477. [Google Scholar]
- Li, Y.; Liang, Y. A comparative study on inter-tern short circuit fault of PMSM using finite element analysis and experiment. In Proceedings of the 2015 International Conference on Advanced Mechatronic Systems, Beijing, China, 22–24 August 2015; pp. 290–294. [Google Scholar]
- Khan, M.S.; Okonkwo, U.V.; Usman, A.; Rajpurohit, B.S. Finite Element Modeling of Demagnetization Fault in Permanent Magnet Direct Current Motors. In Proceedings of the IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–9 August 2018; pp. 1–5. [Google Scholar]
- Vaseghi, B.; Takorabet, N.; Meibody-Tabar, F. Fault Analysis and Parameter Identification of Permanent-Magnet Motors by the Finite-Element Method. IEEE Trans. Magn. 2009, 45, 3290–3295. [Google Scholar] [CrossRef]
- Cheng, M.; Chau, K.T.; Chan, C.C.; Zhou, E.; Huang, X. Nonlinear varying-network magnetic circuit analysis for doubly salient permanent-magnet motors. IEEE Trans. Magn. 2000, 36, 339–348. [Google Scholar] [CrossRef]
- Haddad, R.Z.; Strangas, E.G. On the Accuracy of Fault Detection and Separation in Permanent Magnet Synchronous Machines Using MCSA/MVSA and LDA. IEEE Trans. Energy Convers. 2016, 31, 924–934. [Google Scholar] [CrossRef]
- Jokic, S.; Cincar, N.; Novakovic, B. The analysis of vibration measurement and current signature in motor drive faults detection. In Proceedings of the 17th International Symposium INFOTEH-JAHORINA (INFOTEH), East Sarajevo, Bosnia-Herzegovina, 21–23 March 2018; pp. 1–6. [Google Scholar]
- Alameh, K.; Cite, N.; Hoblos, G.; Barakat, G. Feature extraction for vibration-based fault detection in Permanent Magnet Synchronous Motors. In Proceedings of the Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Beirut, Lebanon, 29 April–1 May 2015; pp. 163–168. [Google Scholar]
- Elbouchikhi, E.; Choqueuse, V.; Auger, F.; Benbouzid, M.E.H. Motor Current Signal Analysis Based on a Matched Subspace Detector. IEEE Trans. Instrum. Meas. 2017, 66, 3260–3270. [Google Scholar] [CrossRef]
- Immovilli, F.; Bianchini, C.; Cocconcelli, M.; Bellini, A.; Rubini, R. Bearing Fault Model for Induction Motor with Externally Induced Vibration. IEEE Trans. Ind. Electron. 2013, 60, 3408–3418. [Google Scholar] [CrossRef]
- Yu, S.; Tang, R. Electromagnetic and mechanical characterizations of noise and vibration in permanent magnet synchronous machines. IEEE Trans. Magn. 2006, 42, 1335–1338. [Google Scholar]
- Rosero, J.A.; Romeral, L.; Cusido, J.; Garcia, A.; Ortega, J.A. On the short-circuiting Fault Detection in a PMSM by means of Stator Current Transformations. In Proceedings of the IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1936–1941. [Google Scholar]
- Faiz, J.; Exiri, S.A.H. Short-circuit fault diagnosis in permanent magnet synchronous motors—An overview. In Proceedings of the Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; pp. 18–27. [Google Scholar]
- Urresty, J.; Riba, J.; Romeral, L.; Rosero, J.; Serna, J. Stator short circuits detection in PMSM by means of Hilbert-Huang transform and energy calculation. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, Cargese, France, 31 August–3 September 2009; pp. 1–7. [Google Scholar]
- Refaat, S.S.; Abu-Rub, H.; Saad, M.S.; Aboul-Zahab, E.M.; Iqbal, A. Discrimination of stator winding turn fault and unbalanced supply voltage in permanent magnet synchronous motor using ANN. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 858–863. [Google Scholar]
- Hang, J.; Ding, S.; Zhang, J.; Cheng, M.; Chen, W.; Wang, Q. Detection of Interturn Short-Circuit Fault for PMSM With Simple Fault Indicator. IEEE Trans. Energy Convers. 2016, 31, 1697–1699. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, L.; Rosero, E.; Urresty, J. Fault Detection in dynamic conditions by means of Discrete Wavelet Decomposition for PMSM running under Bearing Damage. In Proceedings of the Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 951–956. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J.; Araabi, B.N. Pattern identification for eccentricity fault diagnosis in permanent magnet synchronous motors using stator current monitoring. IET Electr. Power Appl. 2010, 4, 418. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, L.; Cusido, J.; Ortega, J.A. Fault detection by means of wavelet transform in a PMSMW under demagnetization. In Proceedings of the IECON 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1149–1154. [Google Scholar]
- Espinosa, A.G.; Rosero, J.A.; Cusido, J.; Romeral, L.; Ortega, J.A. Fault Detection by Means of Hilbert–Huang Transform of the Stator Current in a PMSM with Demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef]
- Goktas, T.; Zafarani, M.; Akin, B. Separation of broken magnet and static eccentricity failures in PMSM. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 1459–1465. [Google Scholar]
- Liang, H.; Chen, Y.; Liang, S.; Wang, C. Fault Detection of Stator Inter-Turn Short-Circuit in PMSM on Stator Current and Vibration Signal. Appl. Sci. 2018, 8, 1677. [Google Scholar] [CrossRef]
- Safizadeh, M.S.; Latifi, S.K. Using multi-sensor data fusion for vibration fault diagnosis of rolling element bearings by accelerometer and load cell. Inf. Fusion 2014, 18, 1–8. [Google Scholar] [CrossRef]
- Yong, C.; Xu, Z.; Liu, X. Sensorless control at low speed based on HF signal injection and a new signal processing method. In Proceedings of the Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 3041–3045. [Google Scholar]
- Strangas, E.G.; Aviyente, S.; Zaidi, S.S.H. Time–Frequency Analysis for Efficient Fault Diagnosis and Failure Prognosis for Interior Permanent-Magnet AC Motors. IEEE Trans. Ind. Electron. 2008, 55, 4191–4199. [Google Scholar] [CrossRef]
- Rosero, J.; Cusido, J.; Espinosa, A.G.; Ortega, J.A.; Romeral, L. Broken Bearings Fault Detection for a Permanent Magnet Synchronous Motor under non-constant working conditions by means of a Joint Time Frequency Analysis. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 3415–3419. [Google Scholar]
- Cabal-Yepez, E.; Garcia-Ramirez, A.G.; Romero-Troncoso, R.J.; Garcia-Perez, A.; Osornio-Rios, R.A. Reconfigurable Monitoring System for Time-Frequency Analysis on Industrial Equipment Through STFT and DWT. IEEE Trans. Ind. Inform. 2013, 9, 760–771. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, J.L.; Cusido, J.; Ortega, J.A.; Garcia, A. Fault detection of eccentricity and bearing damage in a PMSM by means of wavelet transforms decomposition of the stator current. In Proceedings of the Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008; pp. 111–116. [Google Scholar]
- Haje Obeid, N.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Trans. Transp. Electrif. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Khan, M.A.S.K.; Radwan, T.S.; Rahman, M.A. Diagnosis and Protection of IPM Motors Using Wavelet Packet Transform. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; pp. 1970–1977. [Google Scholar]
- Ping, Z.A.; Juan, Y.; Ling, W. Fault Detection of Stator Winding Interturn Short Circuit in PMSM Based on Wavelet Packet Analysis. In Proceedings of the Fifth International Conference on Measuring Technology and Mechatronics Automation, Hong Kong, China, 16–17 January 2013; pp. 566–569. [Google Scholar]
- Yan, R.; Gao, R.X. Hilbert–Huang Transform-Based Vibration Signal Analysis for Machine Health Monitoring. IEEE Trans. Instrum. Meas. 2006, 55, 2320–2329. [Google Scholar] [CrossRef]
- Faiz, J.; Ghorbanian, V.; Ebrahimi, B.M. A new criterion for rotor broken bar fault diagnosis in line-start and inverter-fed induction motors using Hilbert-Huang transform. In Proceedings of the 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems, Bengaluru, India, 16–19 December 2012; pp. 1–6. [Google Scholar]
- Hui, L.; Yuping, Z. Bearing Faults Diagnosis Based on EMD and Wigner-Ville Distribution. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 5447–5451. [Google Scholar]
- Liu, J.; Zhou, K.; Hu, Y. EMD-WVD Method Based High—Frequency Current Analysis of Low Voltage Arc. In Proceedings of the Condition Monitoring and Diagnosis (CMD), Perth, WA, Australia, 23–26 September 2018; pp. 1–5. [Google Scholar]
- Rosero, J.; Romeral, J.A.O.; Romeral, L.; Rosero, E. Short circuit fault detection in PMSM by means of empirical mode decomposition (EMD) and wigner ville distribution (WVD). In Proceedings of the Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008; pp. 98–103. [Google Scholar]
- Rosero, J.A.; Romeral, L.; Ortega, J.A.; Rosero, E. Short-Circuit Detection by Means of Empirical Mode Decomposition and Wigner–Ville Distribution for PMSM Running Under Dynamic Condition. IEEE Trans. Ind. Electron. 2009, 56, 4534–4547. [Google Scholar] [CrossRef]
- Quiroga, J.; Liu, L.; Cartes, D.A. Fuzzy logic-based fault detection of PMSM stator winding short under load fluctuation using negative sequence analysis. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 4262–4267. [Google Scholar]
- Guefack, F.L.T.; Kiselev, A.; Kuznietsov, A. Improved Detection of Inter-turn Short Circuit Faults in PMSM Drives using Principal Component Analysis. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 154–159. [Google Scholar]
- Yin, S.; Ding, S.X.; Xie, X.; Luo, H. A Review on Basic Data-Driven Approaches for Industrial Process Monitoring. IEEE Trans. Ind. Electron. 2014, 61, 6418–6428. [Google Scholar] [CrossRef]
- Filippetti, F.; Franceschin, G.; Vas, P. Recent Developments of Induction Motor Drives Fault Diagnosis Using AI Techniques. IEEE Trans. Ind. Electron. 2000, 47, 994–1004. [Google Scholar] [CrossRef]
- Moosavi, S.S.; Djerdir, A.; Ait-Amirat, Y.; Kkuburi, D.A. Artificial neural networks-based fault detection in 3-Phase PMSM traction motor. In Proceedings of the International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1579–1585. [Google Scholar]
- Yang, S.; Li, W.; Wang, C. The intelligent fault diagnosis of wind turbine gearbox based on artificial neural network. In Proceedings of the International Conference on Condition Monitoring and Diagnosis, Beijing, China, 21–24 April 2008; pp. 1327–1330. [Google Scholar]
- Quiroga, J.; Cartes, D.A.; Edrington, C.S.; Liu, L. Neural network-based fault detection of PMSM stator winding short under load fluctuation. In Proceedings of the 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 793–798. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J.; Javan-Roshtkhari, M.; Zargham Nejhad, A. Static Eccentricity Fault Diagnosis in Permanent Magnet Synchronous Motor Using Time Stepping Finite Element Method. IEEE Trans. Magn. 2008, 44, 4297–4300. [Google Scholar] [CrossRef]
- Cira, F.; Arkan, M.; Gumus, B. A new approach to detect stator fault in permanent magnet synchronous motors. In Proceedings of the IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2015; pp. 316–321. [Google Scholar]
- Zhong, J.; Yang, Z.; Wong, S.F. Machine condition monitoring and fault diagnosis based on support vector machine. In Proceedings of the IEEE International Conference on Industrial Engineering and Engineering Management, Macao, China, 7–10 October 2010; pp. 2228–2233. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J. Feature Extraction for Short-Circuit Fault Detection in Permanent-Magnet Synchronous Motors Using Stator-Current Monitoring. IEEE Trans. Power Electron. 2010, 25, 2673–2682. [Google Scholar] [CrossRef]
- Chen, F.; Tang, B.; Chen, R. A novel fault diagnosis model for gearbox based on wavelet support vector machine with immune genetic algorithm. Measurement 2013, 46, 220–232. [Google Scholar] [CrossRef]
- Dou, R.; Song, F.; Liu, H.; Men, X. Demagnetization Quantification of PMSM Based on Support Vector Regression. In Proceedings of the Prognostics and System Health Management Conference (PHM-Chongqing), Chongqing, China, 26–28 October 2018; pp. 619–623. [Google Scholar]
- Hassani, H.; Zarei, J.; Arefi, M.M.; Razavi-Far, R. zSlices-Based General Type-2 Fuzzy Fusion of Support Vector Machines with Application to Bearing Fault Detection. IEEE Trans. Ind. Electron. 2017, 64, 7210–7217. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Y.; Yang, J.; Li, X.; Zhang, D. A Survey of Sparse Representation: Algorithms and Applications. IEEE Access 2015, 3, 490–530. [Google Scholar] [CrossRef]
- Aharon, M.; Elad, M.; Bruckstein, A. K-SVD: An Algorithm for Designing Overcomplete Dictionaries for Sparse Representation. IEEE Trans. Signal Process. 2006, 54, 4311. [Google Scholar] [CrossRef]
- Yang, B.; Liu, R.; Chen, X. Fault Diagnosis for a Wind Turbine Generator Bearing via Sparse Representation and Shift-Invariant K-SVD. IEEE Trans. Ind. Inform. 2017, 13, 1321–1331. [Google Scholar] [CrossRef]
- Wright, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Ma, Y. Robust Face Recognition via Sparse Representation. IEEE Trans. Pattern Anal. 2009, 31, 210–227. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching Pursuits with Time-Frequency Dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Hou, J.; Wang, Y.; Gao, T.; Yang, Y. Fault feature extraction of power electronic circuits based on sparse decomposition. In Proceedings of the International Conference on Condition Monitoring and Diagnosis (CMD), Xi’an, China, 25–28 September 2016; pp. 505–508. [Google Scholar]
- Pati, Y.C.; Rezaiifar, R.; Krishnaprasad, P.S. Orthogonal Matching Pursuit: Recursive Function Approximat ion with Applications to Wavelet Decomposition. In Proceedings of the 27th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–3 November 1993; pp. 40–44. [Google Scholar]
- Liang, S.; Chen, Y.; Liang, H.; Li, X. Sparse Representation and SVM Diagnosis Method Inter-Turn Short-Circuit Fault in PMSM. Appl. Sci. 2019, 9, 224. [Google Scholar] [CrossRef]
- Ren, L.; Lv, W.; Jiang, S.; Xiao, Y. Fault Diagnosis Using a Joint Model Based on Sparse Representation and SVM. IEEE Trans. Instrum. Meas. 2016, 65, 2313–2320. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Sun, C.; Ma, M.; Zhao, Z.; Chen, X. Sparse Deep Stacking Network for Fault Diagnosis of Motor. IEEE Trans. Ind. Inform. 2018, 14, 3261–3270. [Google Scholar] [CrossRef]
- Chen, Z.; Li, W. Multisensor Feature Fusion for Bearing Fault Diagnosis Using Sparse Autoencoder and Deep Belief Network. IEEE Trans. Instrum. Meas. 2017, 66, 1693–1702. [Google Scholar] [CrossRef]
- Luo, Y.; Qiu, J.; Shi, C. Fault Detection of Permanent Magnet Synchronous Motor Based on Deep Learning Method. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, South Korea, 7–10 October 2018; pp. 699–703. [Google Scholar]
- Lu, C.; Wang, Y.; Ragulskis, M.; Cheng, Y. Fault Diagnosis for Rotating Machinery: A Method based on Image Processing. PLoS ONE 2016, 11, 10. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Kao, I.; Wang, W.; Lai, Y.; Perng, J. Analysis of Permanent Magnet Synchronous Motor Fault Diagnosis Based on Learning. IEEE Trans. Instrum. Meas. 2019, 68, 310–324. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).