FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders


Abstract
:1. Introduction
2. Modeling, Data Pretreatment, and Missing Data Features
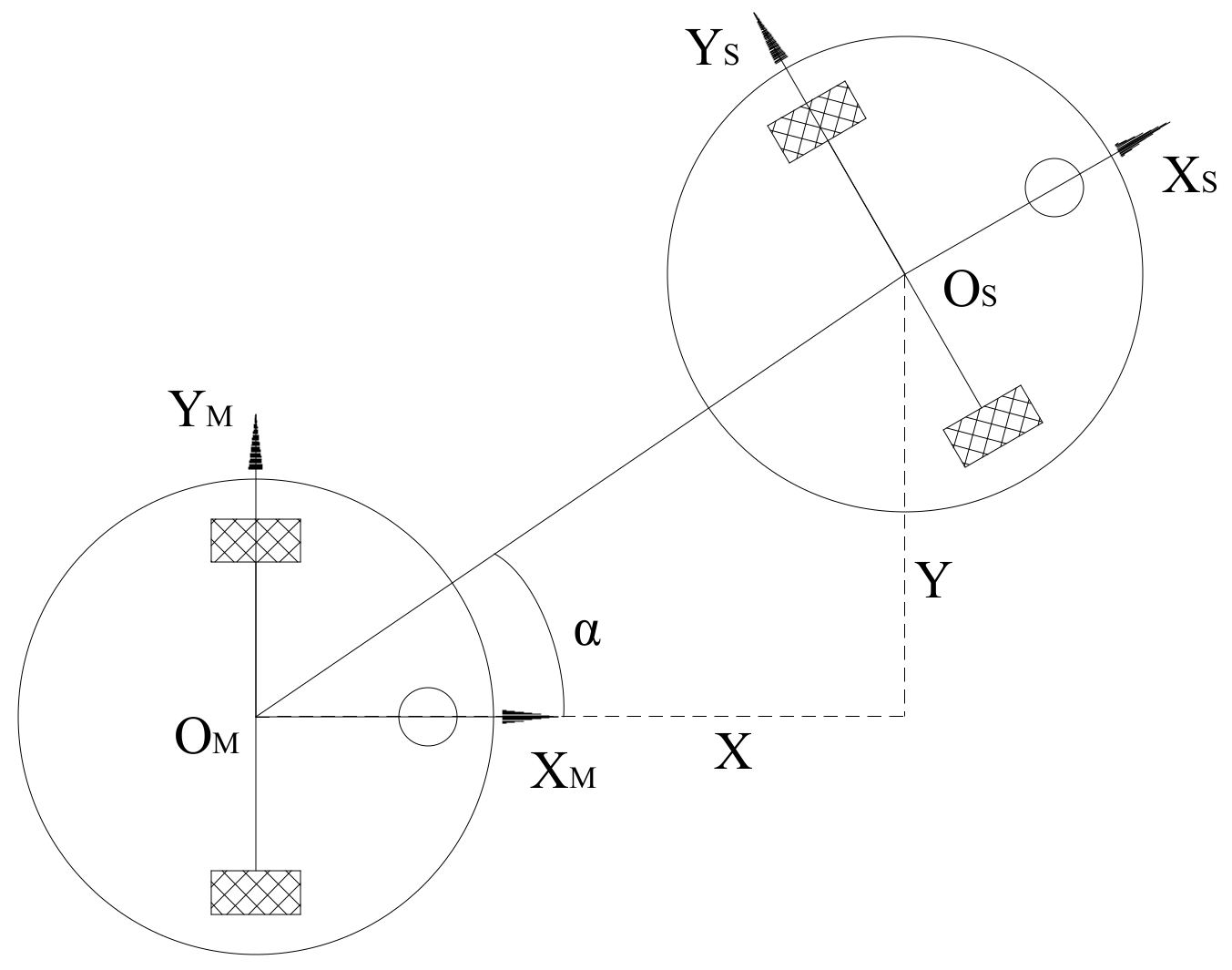
2.1. Robot Modeling
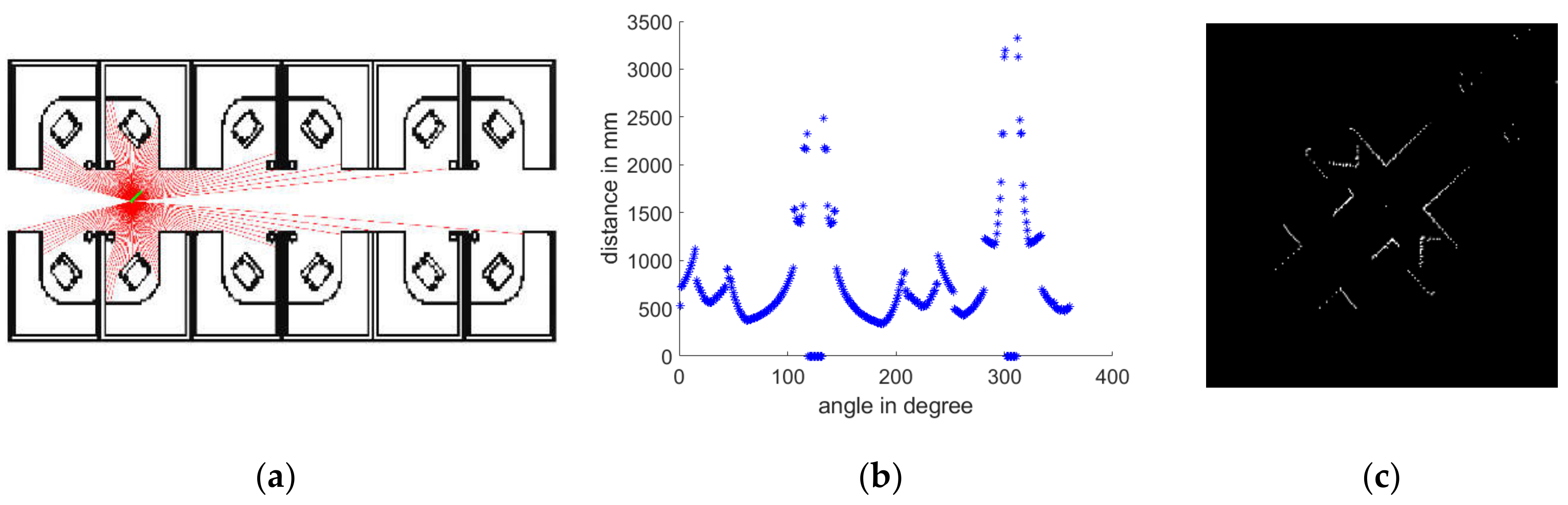
2.2. Scan Data Pretreatment
2.3. The Missing Data Features
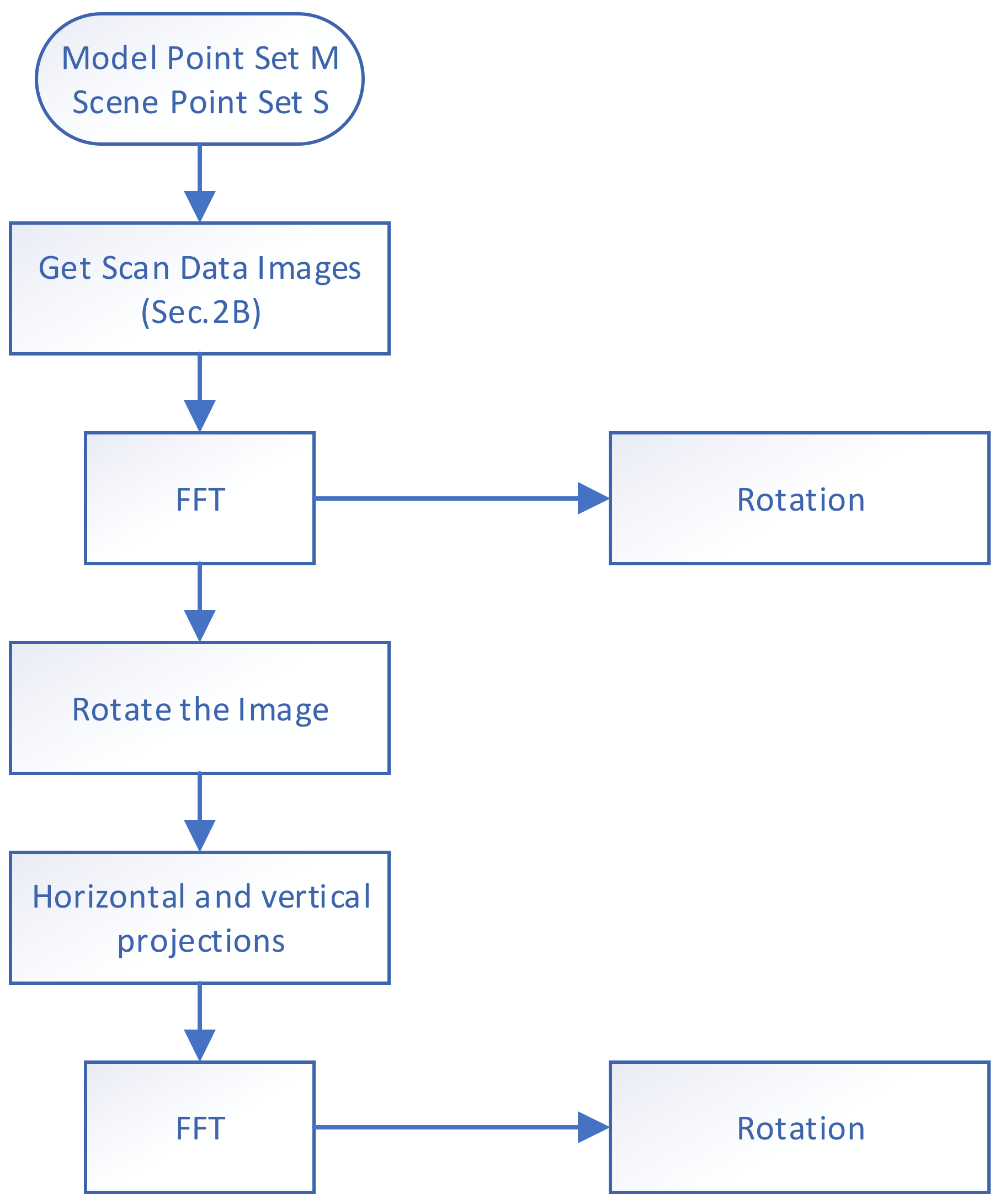
3. FFT-Based Scan-Matching
3.1. Solution of One-Dimensional Fast Fourier Transform (1D FFT)
3.2. Rotation Parameters
3.3. Translation Parameters
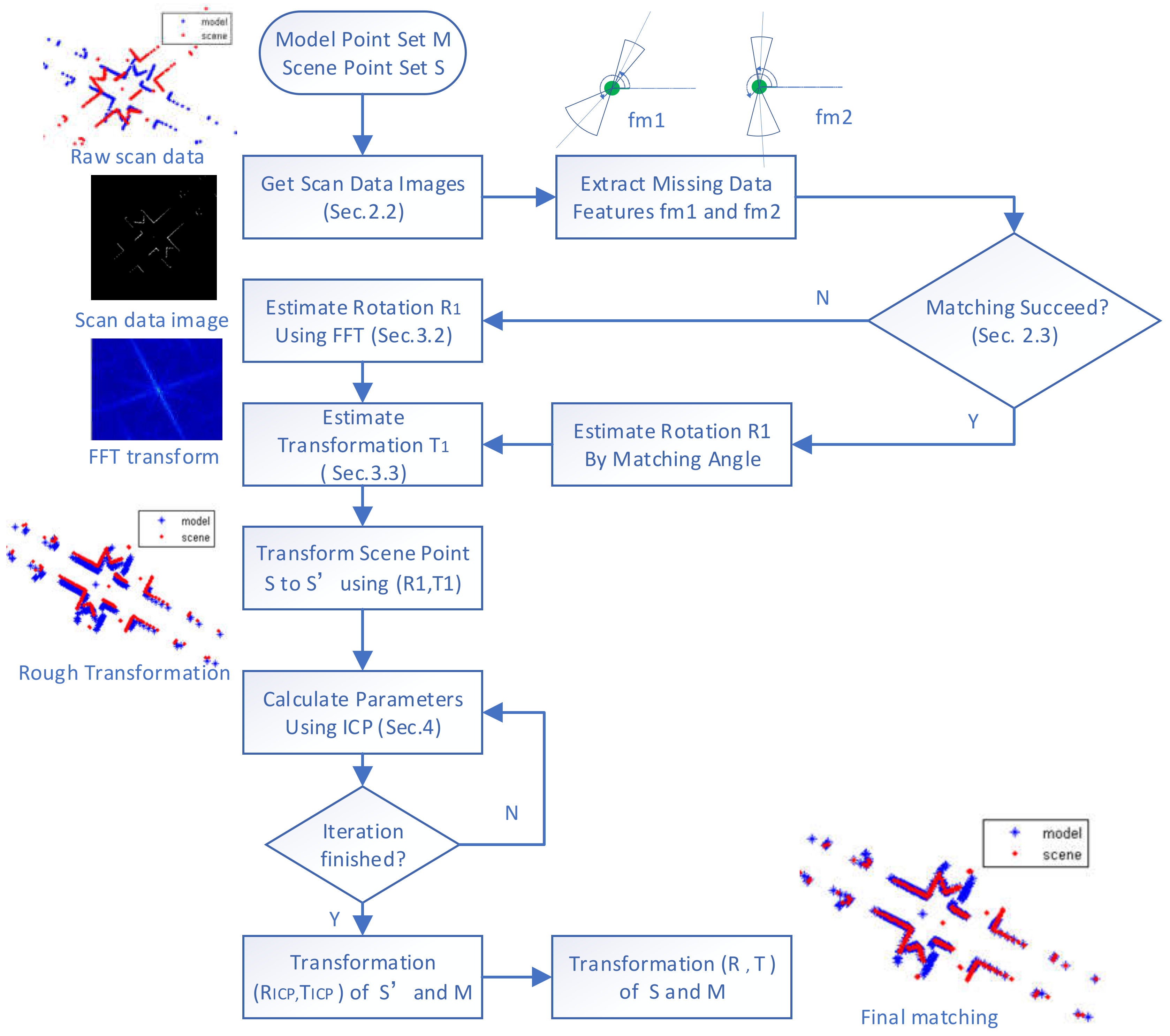
4. The FFT-ICP Scan-Matching Frame-Work
5. Experiment
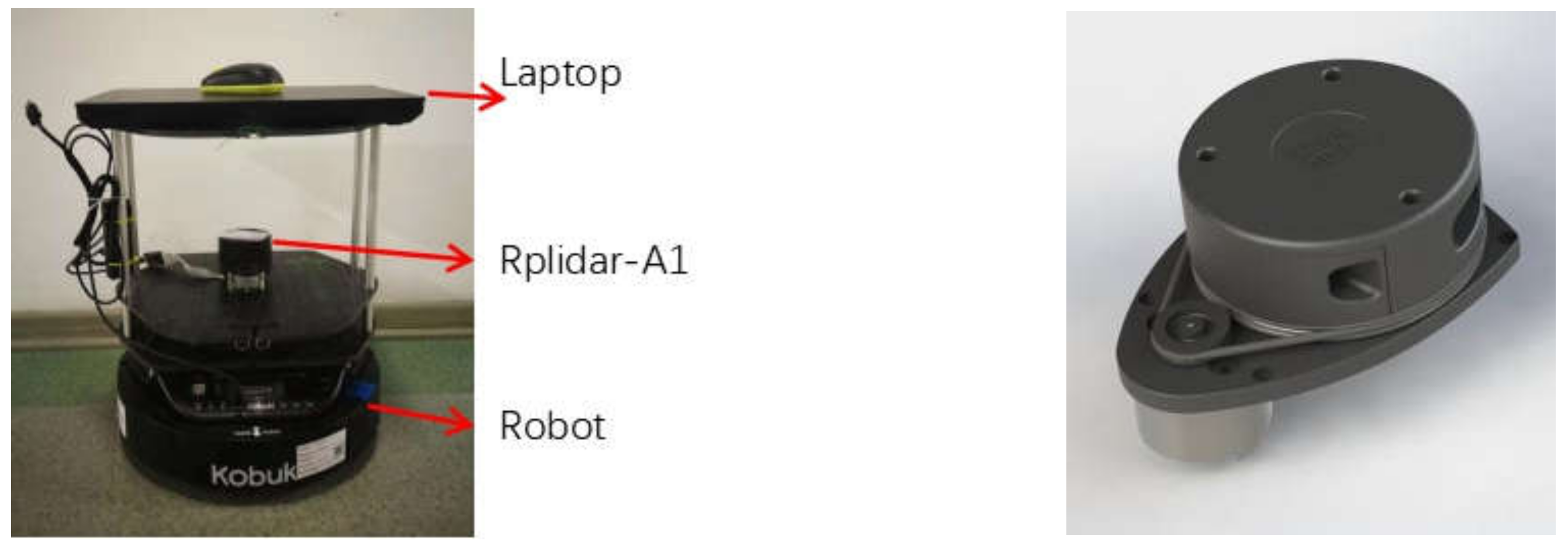
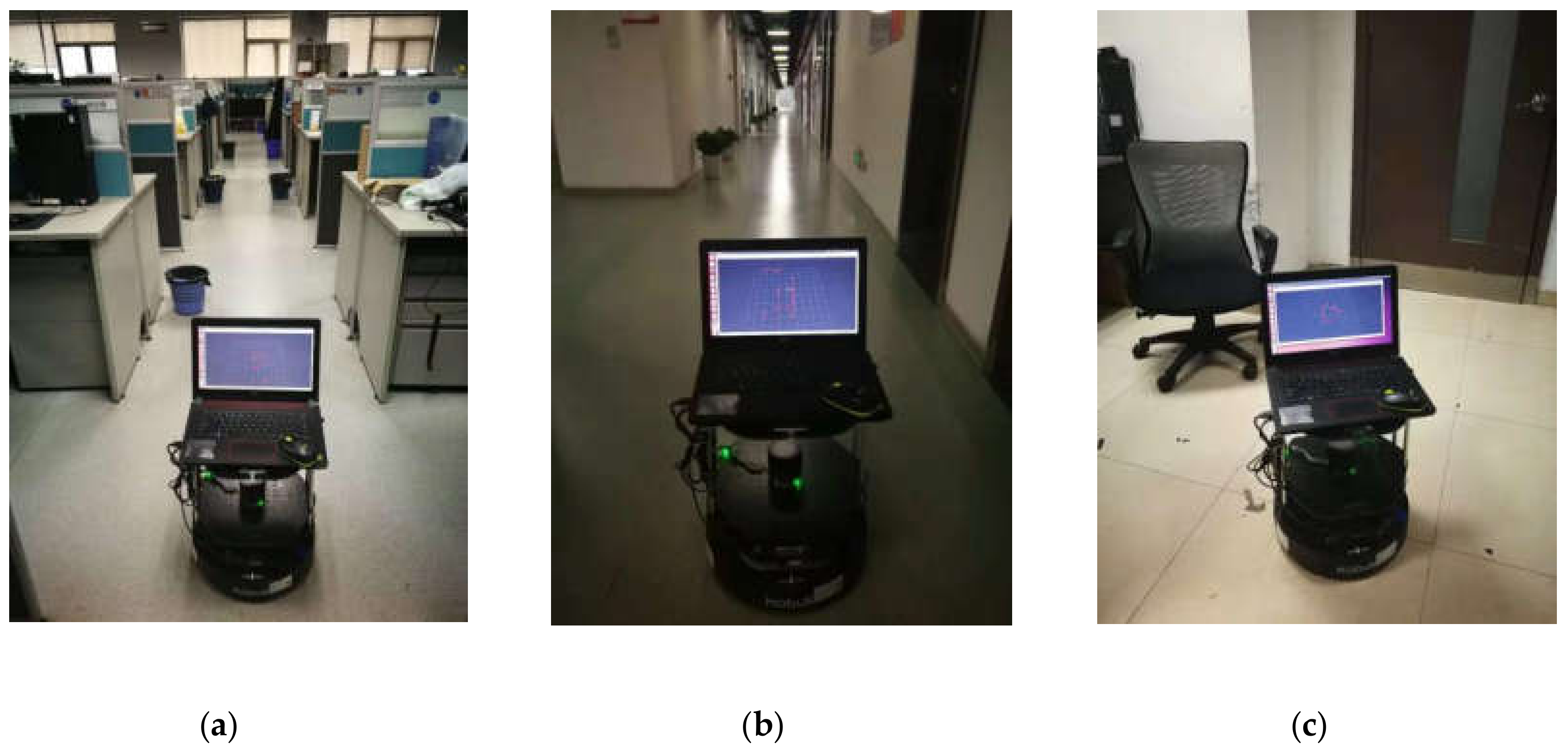
5.1. Experimental Facilities and Settings
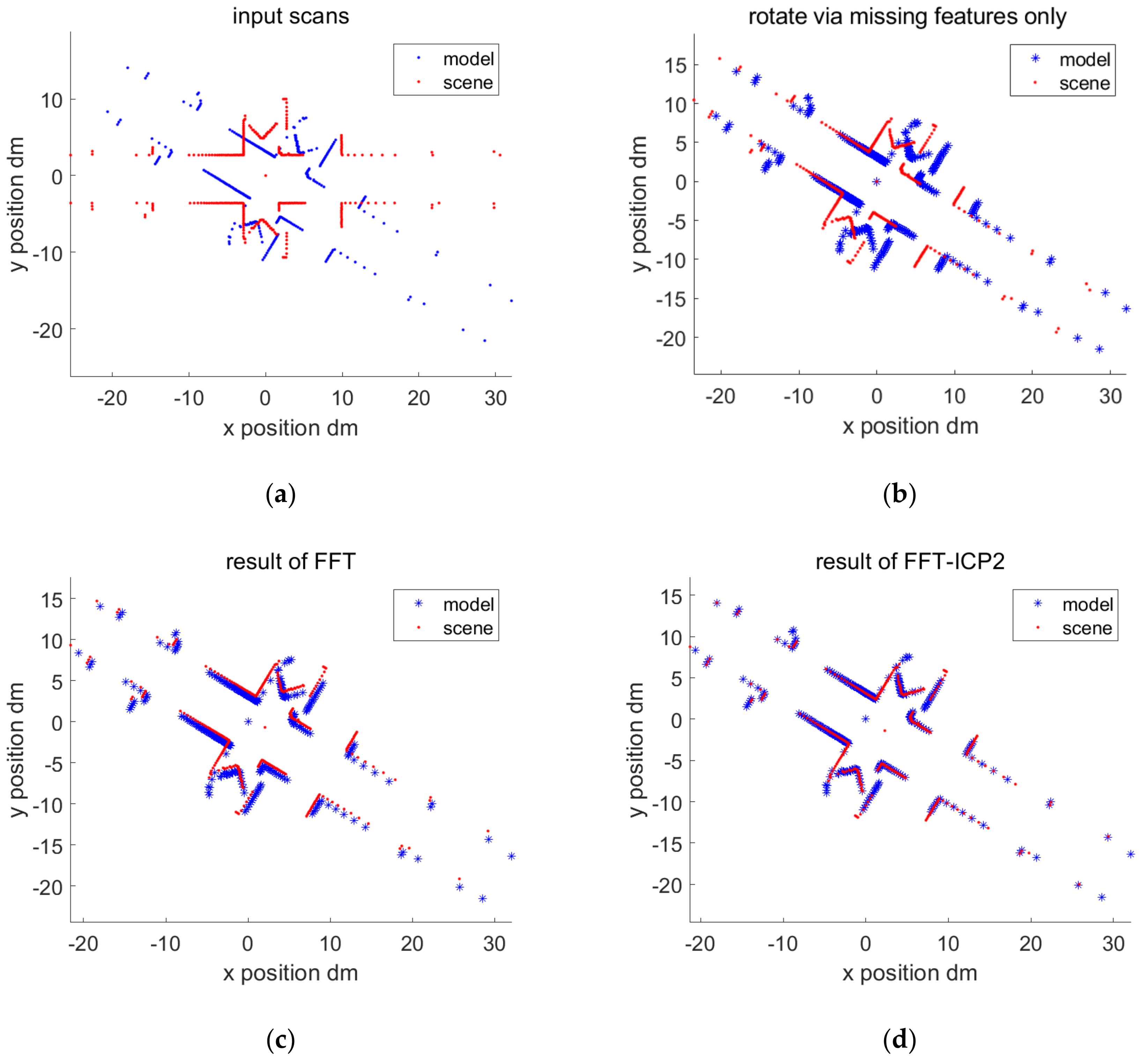
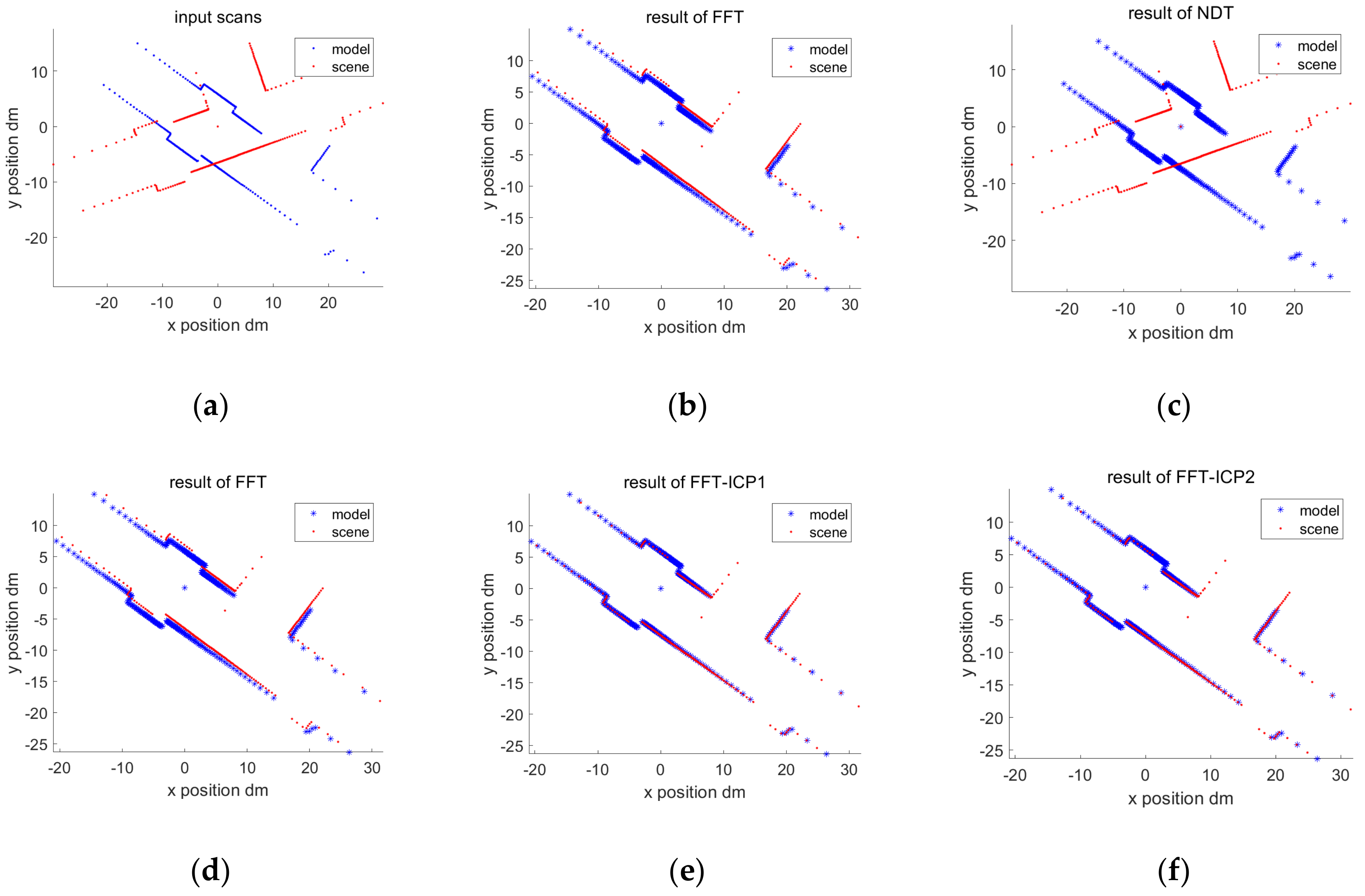
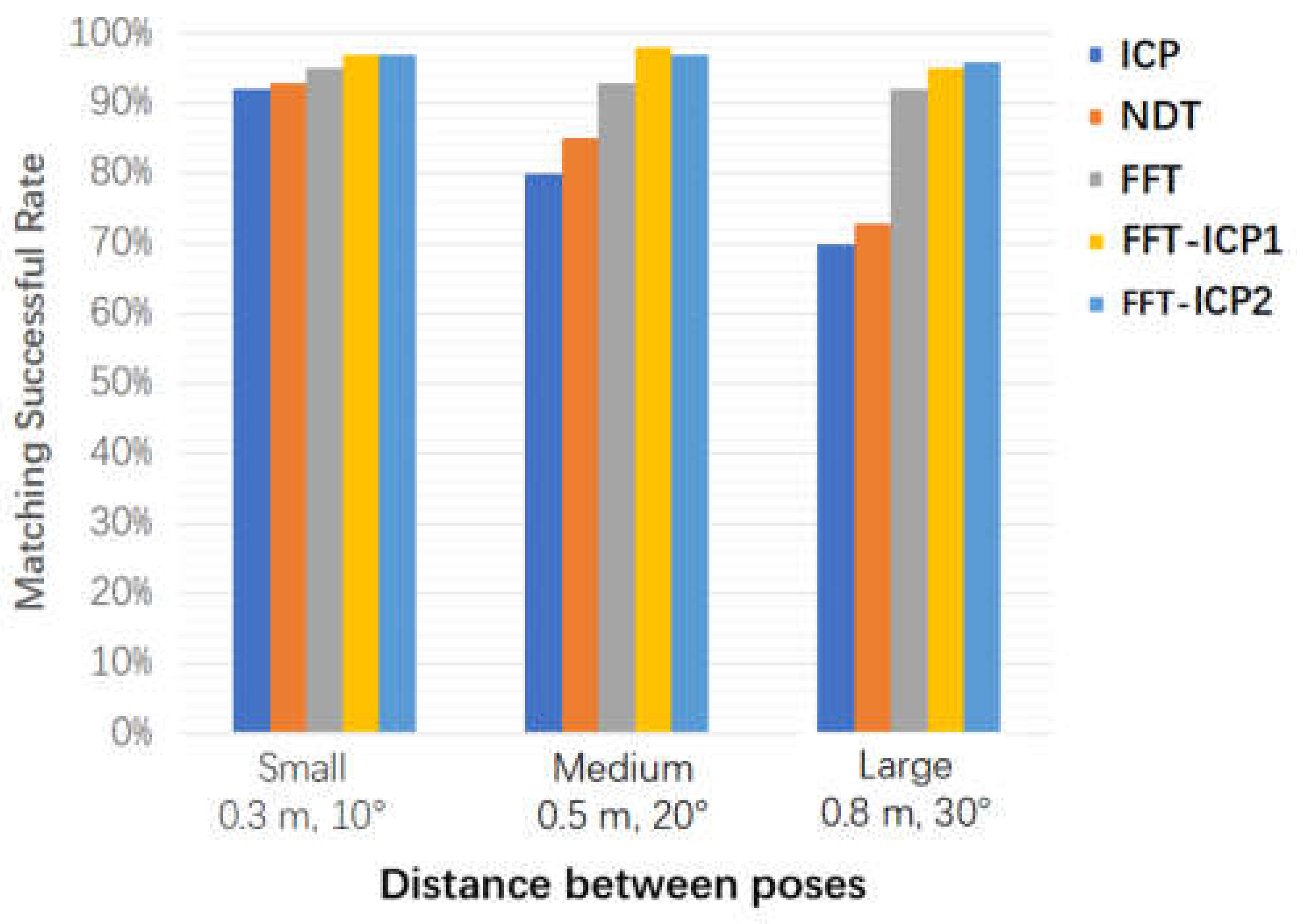
5.2. Scan Matching
5.3. Execution Efficiency
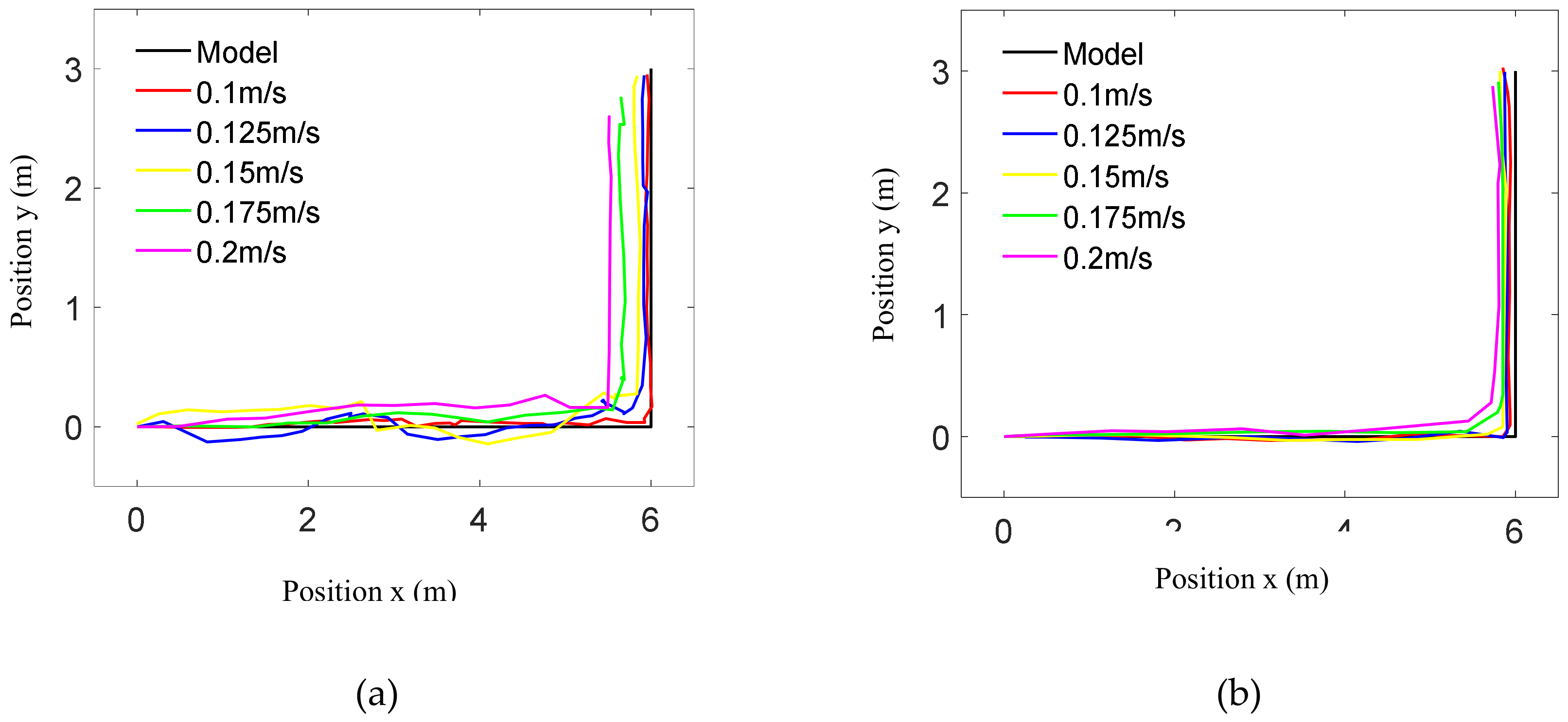
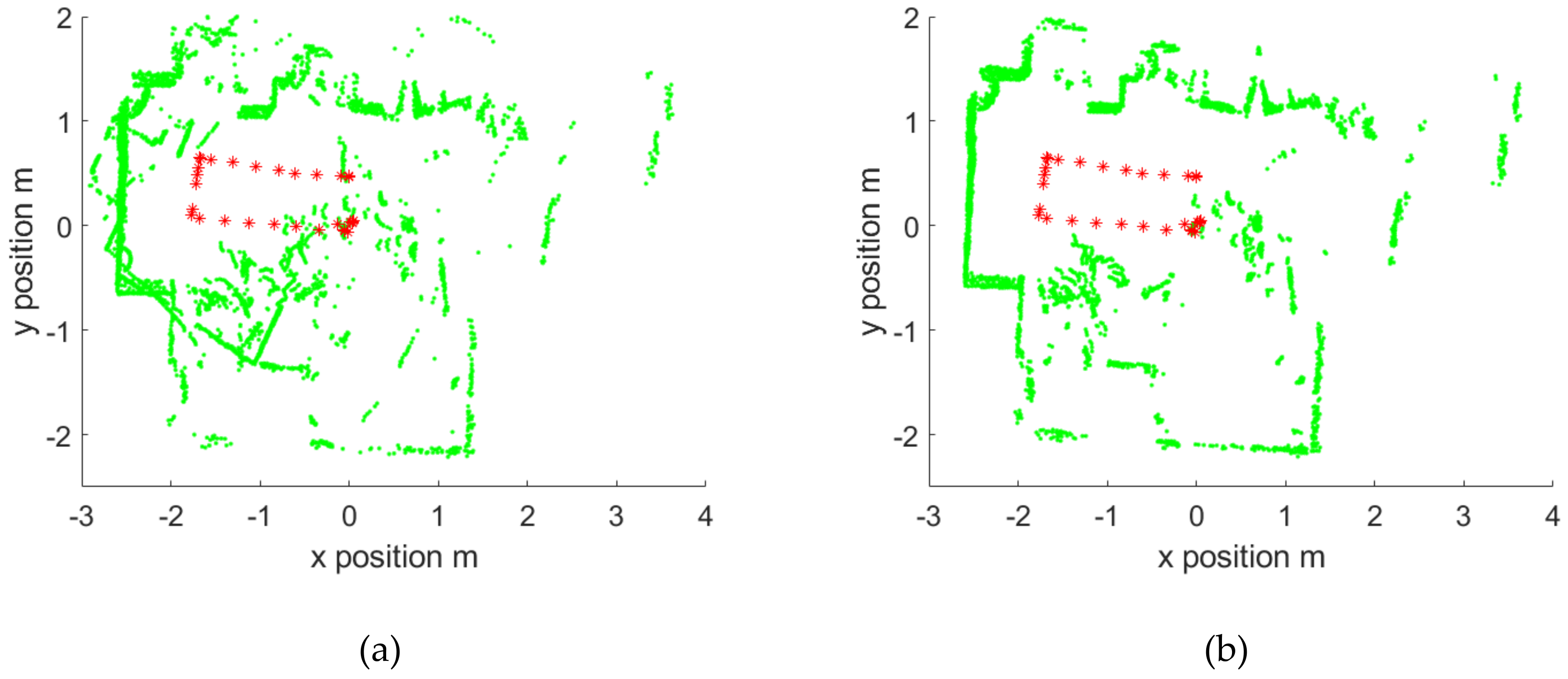
5.4. Dynamic Localization
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; The MIT Press: Cambridge, UK, 2005. [Google Scholar]
- Castellanos, J.A.; Martinez, J.M.; Neria, J.; Tardos, J.D. Simultaneous Map Building and Localization for Mobile Robots: A Multisensor Fusion Approach. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 20 May 1998; Volume 2, pp. 1244–1249. [Google Scholar]
- Zhao, Y.; Liu, F.; Wang, R. Location Technology of Indoor Robot Based on Laser Sensor. In Proceedings of the 2016 7th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 26–28 August 2016; pp. 683–686. [Google Scholar]
- Desouza, G.N.; Kak, A.C. Vision for Mobile Robot Navigation: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 237–267. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Local and Global Localization for Mobile Robots using Visual Landmarks. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, USA, 29 October 2001; Volume 1, pp. 414–420. [Google Scholar]
- Uchimoto, T.; Suzuki, S.; Matsubara, H. A Method to Estimate Robot’s Location Using Vision Sensor for Various Type of Mobile Robots. In Proceedings of the 2009 International Conference on Advanced Robotics, Munich, Germany, 22–26 June 2009; pp. 1–6. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardós, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Jan, S.; Gumhold, S.; Cremers, D. Real-Time Dense Geometry from a Handheld Camera. In Dagm Conference on Pattern Recognition; Springer: Berlin, Germany, 2010; pp. 11–20. [Google Scholar]
- Engel, J.; Sturm, J.; Cremers, D. Semi-dense Visual Odometry for a Monocular Camera. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1449–1456. [Google Scholar]
- Kerl, C.; Sturm, J.; Cremers, D. Dense visual SLAM for RGB-D cameras. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2100–2106. [Google Scholar]
- Valiente, D.; Payá, L.; Jiménez, L.; Sebastián, J.; Reinoso, Ó. Visual Information Fusion through Bayesian Inference for Adaptive Probability-Oriented Feature Matching. Sensors 2018, 18, 2041. [Google Scholar] [CrossRef] [PubMed]
- Valiente, D.; Gil, A.; Payá, L.; Sebastián, J.M.; Reinoso, Ó. Robust Visual Localization with Dynamic Uncertainty Management in Omnidirectional SLAM. Appl. Sci. 2017, 7, 1294. [Google Scholar] [CrossRef]
- Nam, T.H.; Shim, J.H.; Cho, Y.I. A 2.5D Map-Based Mobile Robot Localization via Cooperation of Aerial and Ground Robots. Sensors 2017, 17, 2730. [Google Scholar] [CrossRef] [PubMed]
- Nüchter, A. Parallelization of scan matching for robotics 3D mapping. In Proceedings of the 3rd European Conference on Mobile Robots, Freiburg, Germany, 19–21 September 2007. [Google Scholar]
- Wolcott, R.W.; Eustice, R.M. Fast LIDAR localization using multiresolution Gaussian mixture maps. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2814–2821. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved Techniques for Grid Mapping With Rao-Blackwellized Particle Filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Steux, B.; Hamzaoui, O.E. tinySLAM: A SLAM algorithm in less than 200 lines C-language program. In Proceedings of the International Conference on Control Automation Robotics & Vision, Venice, Italy, 23–25 November 2011; pp. 1975–1979. [Google Scholar]
- Santos, J.M.; Portugal, D.; Rui, P.R. An evaluation of 2D SLAM techniques available in Robot Operating System. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, Linkoping, Sweden, 21–26 October 2013; pp. 1–6. [Google Scholar]
- Konolige, K.; Grisetti, G.; Kümmerle, R.; Burgard, W.; Limketkai, B.; Vincent, R. Efficient Sparse Pose Adjustment for 2D mapping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 22–29. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- López, E.; García, S.; Barea, R.; Bergasa, L.M.; Molinos, E.J.; Arroyo, R.; Romera, E.; Pardo, S. A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments. Sensors 2017, 17, 802. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.; Kim, J.; Yoon, S.; Kim, S.; Cho, H.; Kim, C.; Heo, J. Bore-Sight Calibration of Multiple Laser Range Finders for Kinematic 3D Laser Scanning Systems. Sensors 2015, 15, 10292–10314. [Google Scholar] [CrossRef] [PubMed]
- Papoutsidakis, M.; Kalovrektis, K.; Drosos, C.; Stamoulis, G. Design of an Autonomous Robotic Vehicle for Area Mapping and Remote Monitoring. Int. J. Comput. Appl. 2017, 167, 36–41. [Google Scholar] [CrossRef]
- Ko, N.Y.; Kuc, T.Y. Fusing Range Measurements from Ultrasonic Beacons and a Laser Range Finder for Localization of a Mobile Robot. Sensors 2015, 15, 11050–11075. [Google Scholar] [CrossRef] [PubMed]
- Oh, T.; Lee, D.; Kim, H.; Myung, H. Graph Structure-Based Simultaneous Localization and Mapping Using a Hybrid Method of 2D Laser Scan and Monocular Camera Image in Environments with Laser Scan Ambiguity. Sensors 2015, 15, 15830–15852. [Google Scholar] [CrossRef] [PubMed]
- Besl, P.J.; Mckay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Lu, F.; Milios, E. Robot pose estimation in unknown environments by matching 2d range scans. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 18–22 June 1994; pp. 935–938. [Google Scholar]
- Bosse, M.C. ATLAS: A Framework for Large Scale Automated Mapping and Localization. Ph.D. Dissertation, Massachusetts Institute of Technology, Cambridge, MA, USA, 2004. [Google Scholar]
- Olson, E. Robust and Efficient Robotic Mapping. Ph.D. Dissertation, Massachusetts Institute of Technology, Cambridge, MA, USA, 2008. [Google Scholar]
- Lv, J.; Wang, Y.; Wu, K.; Dissanayake, G.; Kobayashi, Y.; Xiong, R. Planar scan matching using incident angle. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 4049–4056. [Google Scholar]
- Diosi, A.; Kleeman, L. Fast laser scan matching using polar coordinates. Int. J. Robot. Res. 2007, 26, 1125–1153. [Google Scholar] [CrossRef]
- Censi, A.; Iocchi, L.; Grisetti, G. Scan matching in the hough domain. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Rfer, T. Using histogram correlation to create consistent laser scan maps. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 11–15 May 2002; pp. 625–630. [Google Scholar]
- Bosse, M.; Roberts, J. Histogram matching and global initialization for laser-only slam in large unstructured environments. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4820–4826. [Google Scholar]
- Konolige, K.; Chou, K. Markov Localization using Correlation. In Proceedings of the Sixteenth International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 31 July–6 August 1999; Morgan Kaufmann Publishers Inc.: San Mateo, CA, USA, 1999; pp. 1154–1159. [Google Scholar]
- Olson, E.B. Real-time correlative scan matching. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4387–4393. [Google Scholar]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2743–2748. [Google Scholar]
- Lauer, M.; Lange, S.; Riedmiller, M. Calculating the perfect match: An efficient and accurate approach for robot self-localization. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Sobreira, H.; Costa, C.M.; Sousa, I.; Rocha, L.; Lima, J.; Farias, P.C.M.A.; Costa, P.; Moreira, A.P. Map-Matching Algorithms for Robot Self-Localization: A Comparison Between Perfect Match, Iterative Closest Point and Normal Distributions Transform. J. Intell. Robot. Syst. 2018, 92, 1–14. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF:Speeded up robust features. Comput. Vis. Image Understand. (CVIU) 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; Volume 58, pp. 2564–2571. [Google Scholar]
- Alliney, S.; Morandi, C. Digital Image Registration Using Projections. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 222–233. [Google Scholar] [CrossRef]
- Stone, H.S.; Orchard, M.T.; Chang, E.-C.; Martucci, S.A. A Fast Direct Fourier-based Algorithm for Subpixel Registration of Images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2235–2243. [Google Scholar] [CrossRef]
- Gonzalez, R. Fourier Based Registration of Differentially Scaled Images. In Proceedings of the 2013 IEEE International Conference on Image Processing, Melbourne, Australia, 15–18 September 2013; pp. 1282–1285. [Google Scholar]
- Guo, X.; Xu, Z.; Lu, Y.; Pang, Y. An Application of Fourier-Mellin Transform in Image Registration. In Proceedings of the Fifth International Conference on Computer and Information Technology (CIT’05), Shanghai, China, 21–23 September 2005; pp. 619–623. [Google Scholar]
- Xi, W.; Ou, Y.; Feng, W.; Yu, G. An improved serial method for mobile robot SLAM. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 501–506. [Google Scholar]
- Xi, W.; Ou, Y.; Peng, J.; Yu, G. A new method for indoor low-cost mobile robot SLAM. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; pp. 1012–1017. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring distance | Ranging accuracy | Angle range | Angle resolution | Frequency | Price |
|---|---|---|---|---|---|
| 0.15–6 m | 0.001 m | 0°–360° | 1° | 5.5 Hz | $73 |
| Method | Avg. error of x (m) | Variance of x error | Avg. error of y (m) | Variance of x error | Avg. Rotation error (deg) | Variance of rotation error |
|---|---|---|---|---|---|---|
| NDT [37] | 0.041 | 0.027 | 0.043 | 0.022 | 0.78 | 0.32 |
| ICP [26] | 0.043 | 0.033 | 0.034 | 0.024 | 0.81 | 0.31 |
| FFT [48] | 0.052 | 0.058 | 0.047 | 0.045 | 1.02 | 0.67 |
| FFT-ICP1 [47] | 0.033 | 0.019 | 0.034 | 0.020 | 0.64 | 0.29 |
| FFT-ICP2 [this paper] | 0.040 | 0.021 | 0.037 | 0.023 | 0.75 | 0.28 |
| Step | Obtain scan images | Estimate the rotation | Estimate the translations by FFT | Precise estimation by ICP | |
|---|---|---|---|---|---|
| By missing data features (Section 2.3) | By FFT for rotation (optional) | ||||
| Average Run Time | 10 ms | 5 ms | 103 ms | 82 ms | 11 ms |
| Scenes | ICP (ms) | NDT (ms) | FFT (ms) | FFT-ICP1 (ms) | FFT-ICP2 (ms) |
|---|---|---|---|---|---|
| Room | 23 | 108 | 355 | 198 | 201 |
| Office | 27 | 127 | 367 | 201 | 134 |
| Corridor | 26 | 120 | 365 | 197 | 101 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, G.; Yin, L.; Liu, G.; Xi, W.; Ou, Y. FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders. Appl. Sci. 2019, 9, 41. https://doi.org/10.3390/app9010041
Jiang G, Yin L, Liu G, Xi W, Ou Y. FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders. Applied Sciences. 2019; 9(1):41. https://doi.org/10.3390/app9010041
Chicago/Turabian StyleJiang, Guolai, Lei Yin, Guodong Liu, Weina Xi, and Yongsheng Ou. 2019. "FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders" Applied Sciences 9, no. 1: 41. https://doi.org/10.3390/app9010041
APA StyleJiang, G., Yin, L., Liu, G., Xi, W., & Ou, Y. (2019). FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders. Applied Sciences, 9(1), 41. https://doi.org/10.3390/app9010041