An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
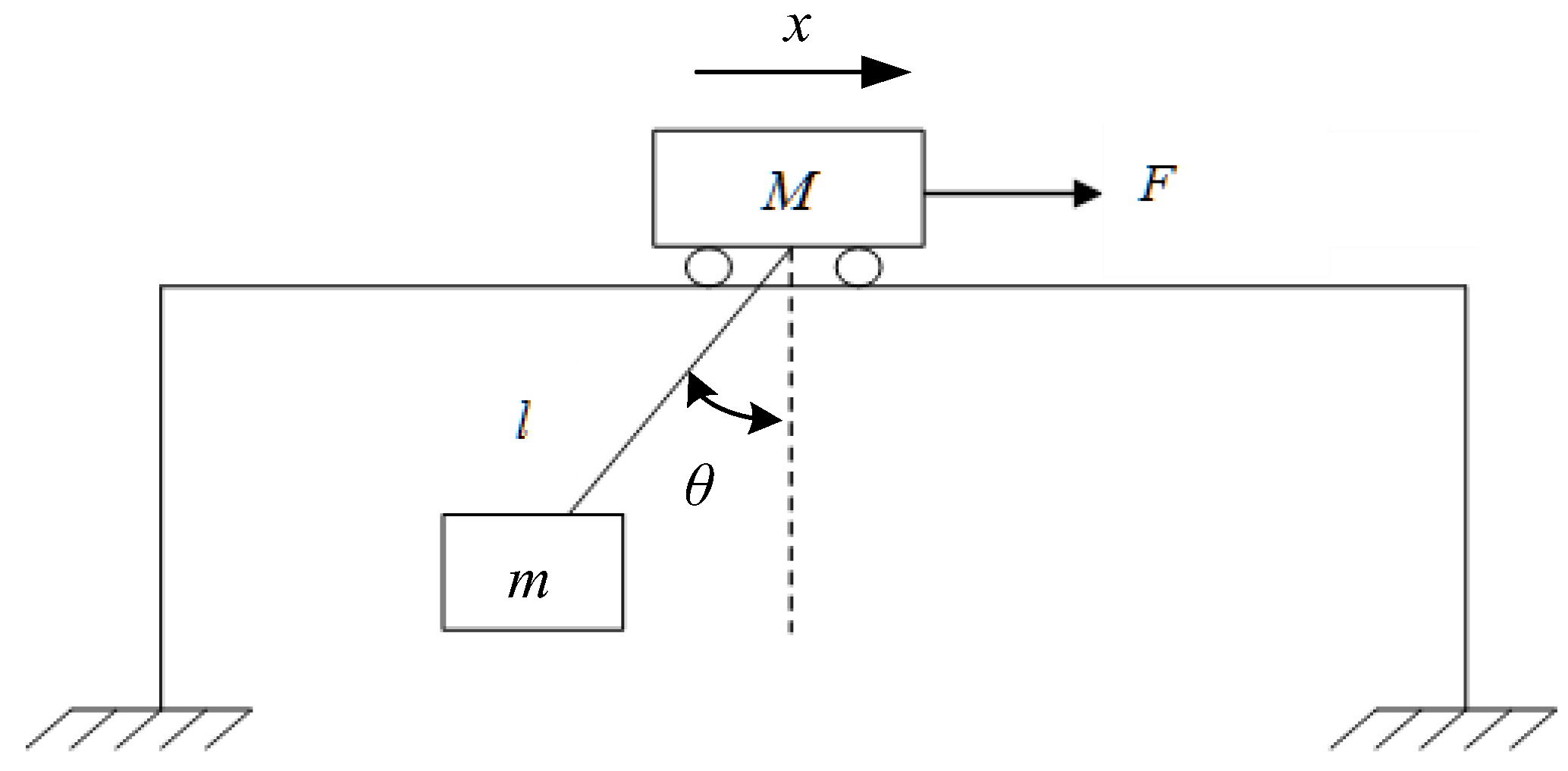
2. Mathematical Model
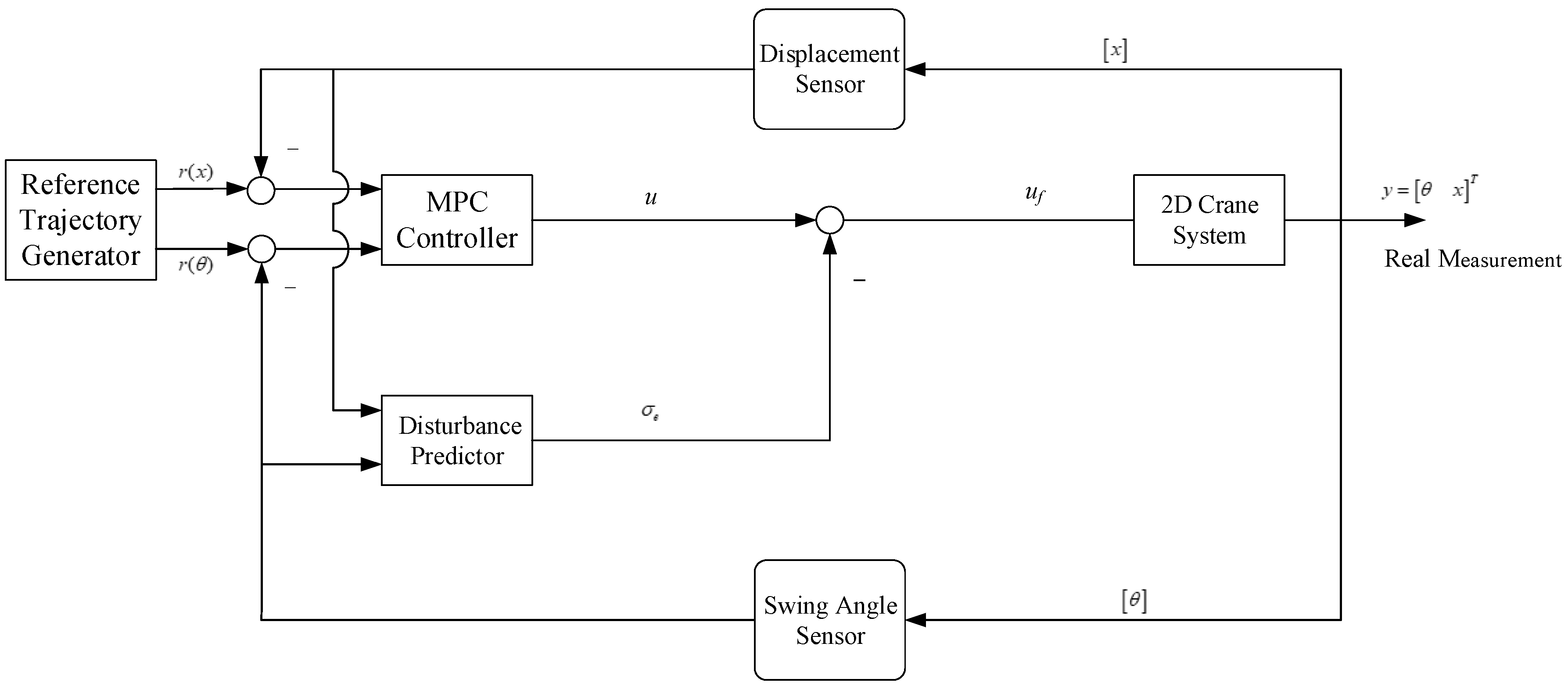
3. Controller Design and Analysis
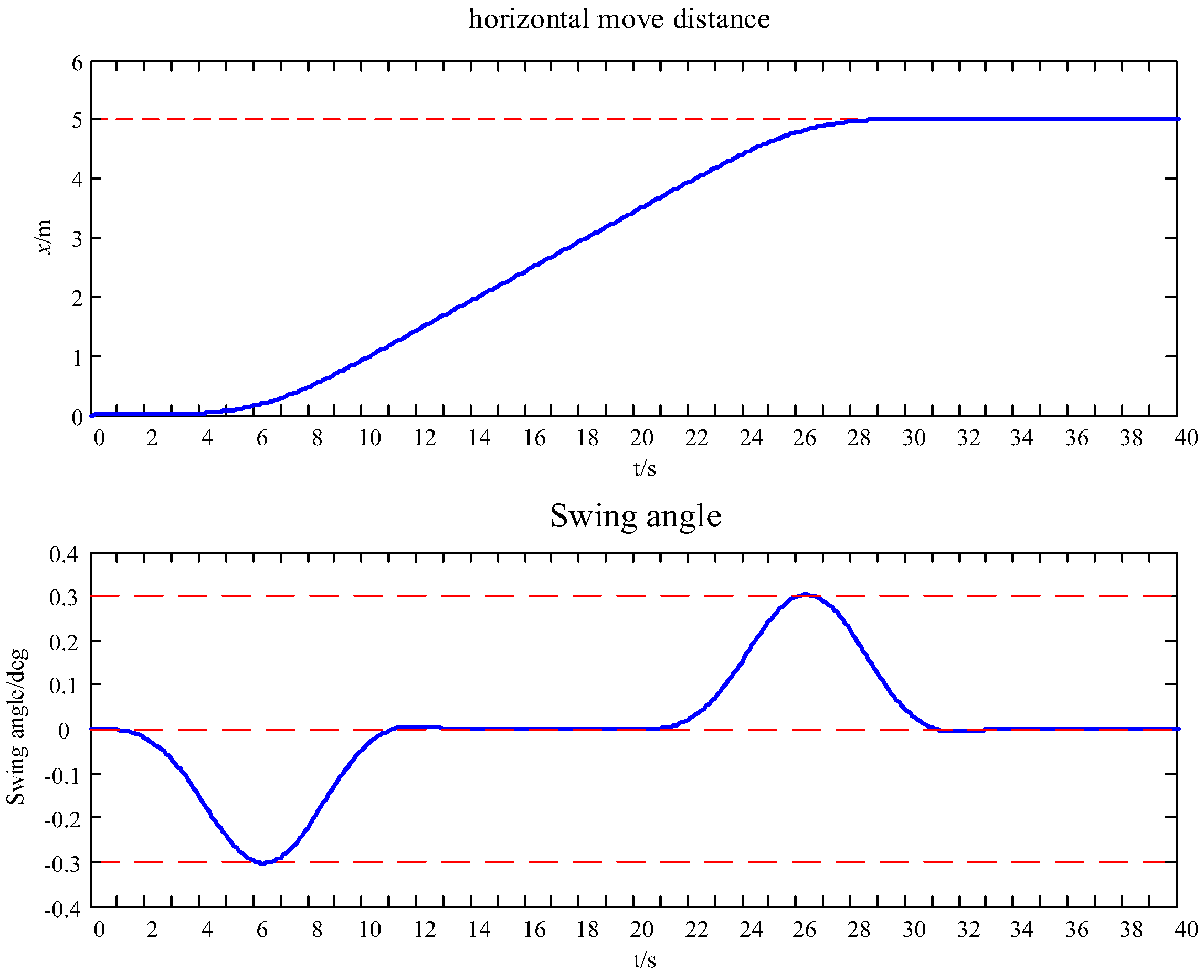
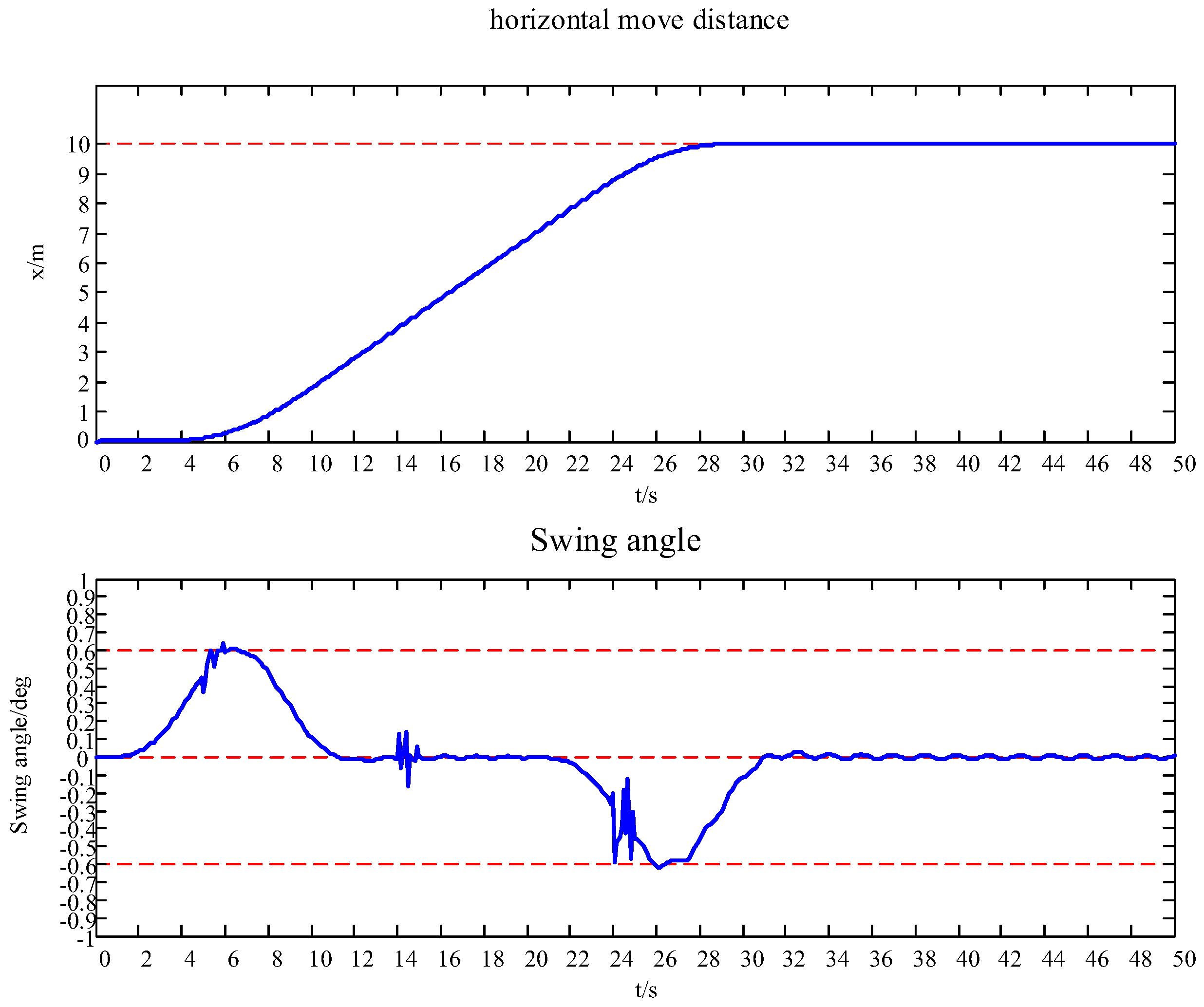
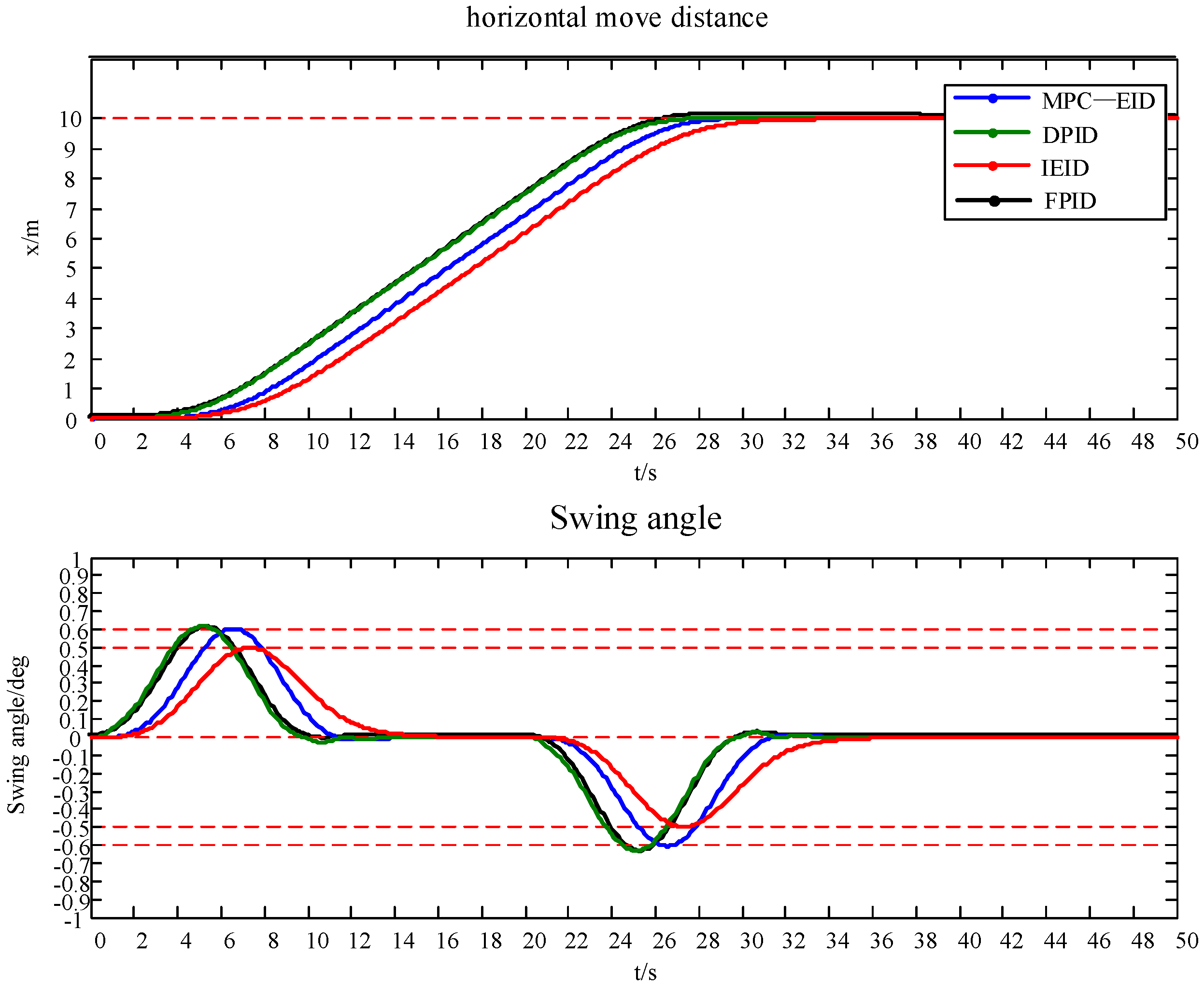
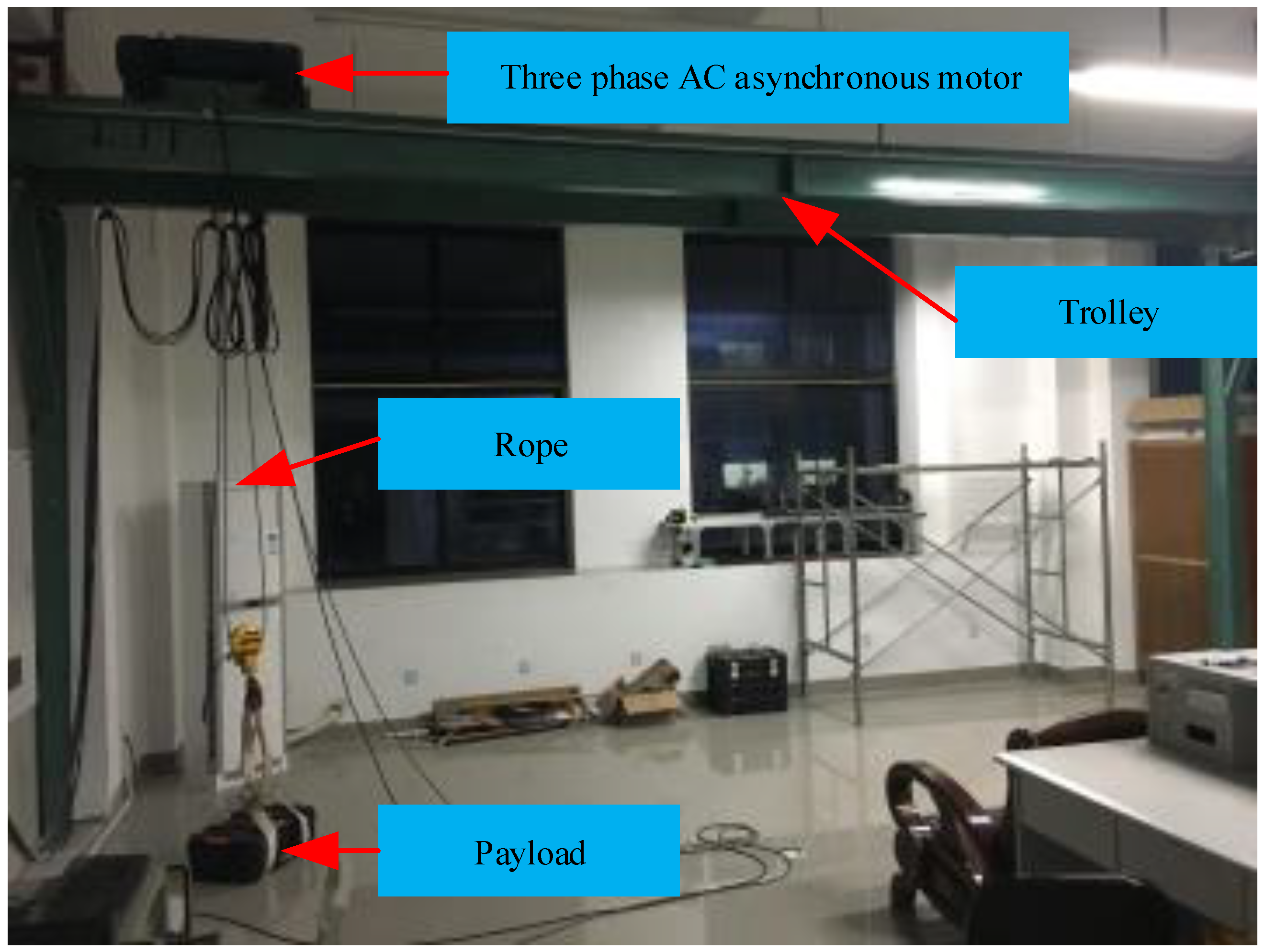
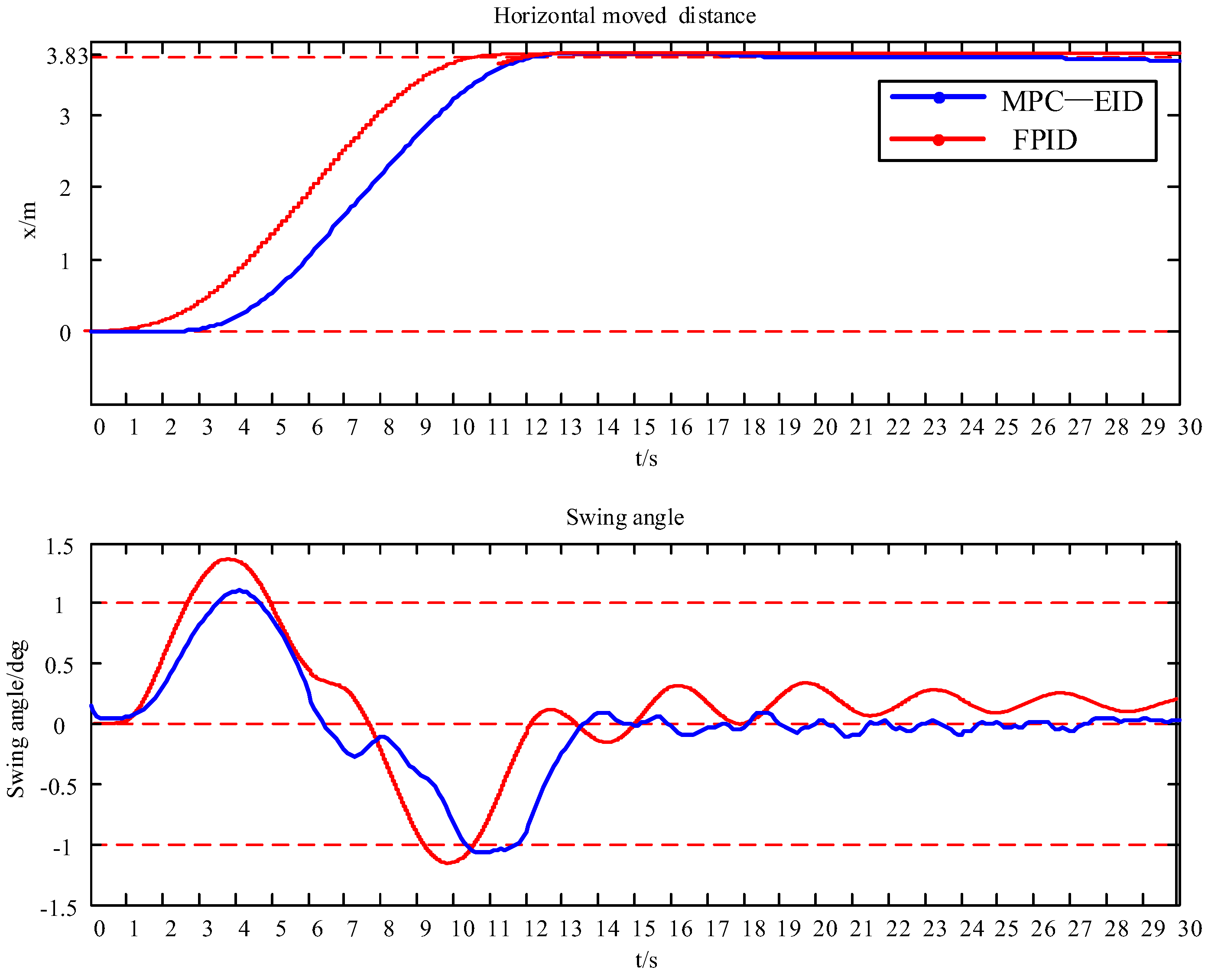
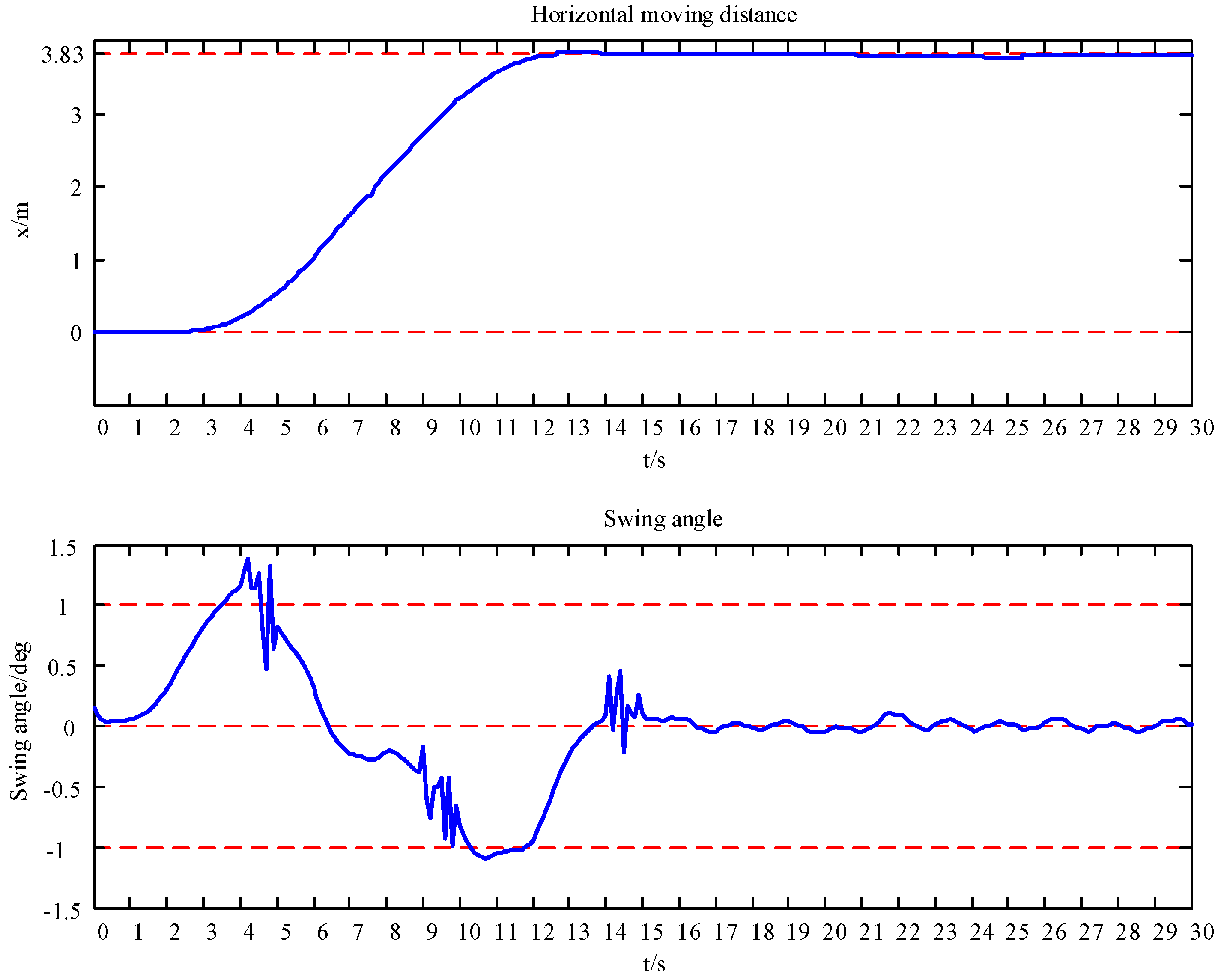
4. Simulation and Experiment
5. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Ramli, L.; Mohamed, Z.; Abdullahi, A.M.; Jaafar, H.I.; Lazim, I.M. Control strategies for crane systems: A comprehensive review. J. Mech. Syst. Signal Proc. 2017, 99, 1–23. [Google Scholar] [CrossRef]
- Colombo, L.; Jiménez, F.; Diego, D.M.D. Variational integrators for underactuated mechanical control systems with symmetries. J. Comput. Dyn. 2017, 2, 193–225. [Google Scholar] [CrossRef]
- Pucci, D.; Romano, F.; Nori, F. Collocated Adaptive Control of Underactuated Mechanical Systems. IEEE Trans. Rob. 2017, 31, 1527–1536. [Google Scholar] [CrossRef]
- Maghsoudi, M.J.; Mohamed, Z.; Sudin, S.; Buyamin, S.; Jaafar, H.I.; Ahmad, S.M. An improved input shaping design for an efficient sway control of a nonlinear 3D overhead crane with friction. J. Mech. Syst. Signal Proc. 2017, 92, 364–378. [Google Scholar] [CrossRef]
- Smoczek, J.; Szpytko, J. Comparision of model predictive, input shaping and feedback control for a lab-scaled overhead crane. In Proceedings of the 2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 29 August–1 September 2016. [Google Scholar]
- Kjelland, M.B.; Hansen, M.R. Using input shaping and pressure feedback to suppress oscillations in slewing motion of lightweight flexible hydraulic crane. Int. J. Fluid Power 2015, 16, 141–148. [Google Scholar] [CrossRef]
- Majid, M.A.; Wan, W.S.; Mohamad, S.; Bakar, Z.A. A comparison of PID and PD controller with input shaping technique for 3D gantry crane. In Proceedings of the IEEE Conference on Systems, Process & Control (ICSPC), Kuala Lumpur, Malaysia, 13–15 December 2013. [Google Scholar]
- Hu, Y.; Wu, B.; Vaughan, J.; Singhose, W. Oscillation suppressing for an energy efficient bridge crane using input shaping. In Proceedings of the 2013 9th Asian Control Conference, Istanbul, Turkey, 23–26 June 2013. [Google Scholar]
- Hu, C.; Wang, R.; Yan, F.; Chadli, M.; Karimi, H.R. Composite Nonlinear Feedback Control for Path Following of Four-Wheel Independently Actuated Autonomous Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2063–2074. [Google Scholar]
- Lee, S.G.; Le, A.T.; Moon, S.C. Partial Feedback Linearization and Sliding Mode Techniques for 2D Crane Contro. Trans. Inst. Meas. Control 2014, 36, 78–87. [Google Scholar] [CrossRef]
- Hilhorst, G.; Pipeleers, G.; Michiels, W.; Oliveira, R.C.L.F.; Peres, P.L.D.; Swevers, J. Fixed-Order Linear Parameter-Varying Feedback Control of a Lab-Scale Overhead Crane. IEEE Trans. Control Syst. Technol. 2016, 24, 1899–1907. [Google Scholar] [CrossRef]
- Dong, H.Q.; Lee, S.G.; Ba, P.D. Double-loop control with proportional-integral and partial feedback linearization for a 3D gantry crane. In Proceedings of the 17th International Conference on Control, Automation and Systems (ICCAS), Ramada Plaza, Jeju, Korea, 18–21 October 2017. [Google Scholar]
- Sun, N.; Fang, Y.; Chen, H.; He, B. Adaptive Nonlinear Crane Control With Load Hoisting/Lowering and Unknown Parameters: Design and Experiments. IEEE/ASME Trans. Mechatron. 2015, 20, 2107–2119. [Google Scholar] [CrossRef]
- Qian, Y.; Fang, Y.; Lu, B. Adaptive repetitive learning control for an offshore boom crane. Automatica 2017, 82, 21–28. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Rong, X.; Song, R.; Tian, X.; Li, Y. A partially saturated adaptive learning controller for overhead cranes with payload hoisting/lowering and unknown parameters. Nonlinear Dyn. 2017, 89, 1779–1791. [Google Scholar] [CrossRef]
- Smoczek, J.; Szpytko, J. Particle Swarm Optimization-Based Multivariable Generalized Predictive Control for an Overhead Crane. IEEE/ASME Trans. Mech. 2017, 22, 258–268. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Rong, X.; Tian, X.; Li, Y. Error tracking control for underactuated overhead cranes against arbitrary initial payload swing angles. Mech. Sys. Signal Proc. 2017, 84, 268–285. [Google Scholar] [CrossRef]
- Wu, X.; He, X. Nonlinear Energy-Based Regulation Control of Three-Dimensional Overhead Cranes. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1297–1308. [Google Scholar] [CrossRef]
- Zhan, Y.; Wu, X.; He, X. Control of the double-container overhead crane. In Proceedings of the 2015 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Hoang, N.Q.; Lee, S.G.; Kim, H.; Moon, S.C. Trajectory planning for overhead crane by trolley acceleration shaping. J. Mech. Sci. Technol. 2014, 28, 2879–2888. [Google Scholar] [CrossRef]
- Kazi, F.; Banavar, R.N.; Mullhaupt, P.; Bonvin, D. Stabilization of a 2D-SpiderCrane Mechanism Using Damping Assignment Passivity-based Control. IFAC Proc. Vol. 2008, 41, 3155–3160. [Google Scholar] [CrossRef]
- Ngo, Q.H.; Nguyen, N.P.; Nguyen, C.N.; Tran, T.H.; Ha, Q.P. Fuzzy sliding mode control of an offshore container crane. Ocean Eng. 2017, 140, 125–134. [Google Scholar] [CrossRef]
- Chwa, D. Sliding Mode Control-based Robust Finite-Time Anti-Sway Tracking Control of 3-D Overhead Cranes. IEEE Trans. Ind. Electron. 2017, 64, 6775–6784. [Google Scholar] [CrossRef]
- Lu, B.; Fang, Y.; Sun, N. Sliding mode control for underactuated overhead cranes suffering from both matched and unmatched disturbances. Mechatronic 2017, 47, 116–125. [Google Scholar] [CrossRef]
- Akhenak, A.; Chadli, M.; Maquin, D.; Ragot, J. Sliding mode multiple observer for fault detection and isolation. In Proceedings of the 42nd IEEE Conference on Decision Control, Maui, HI, USA, 9–12 December 2003. [Google Scholar]
- Sun, N.; Wu, Y.; Fang, Y.; Chen, H. Nonlinear antiswing control for crane systems with double-pendulum swing effects and uncertain parameters: design and experiments. IEEE Trans. Autom. Sci. Eng. 2017, 15, 1–10. [Google Scholar] [CrossRef]
- Al-Dhaheri, N.; Jebali, A.; Diabat, A. A simulation-based Genetic Algorithm approach for the quay crane scheduling under uncertainty. Simul. Model. Pract. Theory 2016, 66, 122–138. [Google Scholar] [CrossRef]
- Qian, D.; Tong, S.; Lee, S.G. Fuzzy-Logic-based control of payloads subjected to double-pendulum motion in overhead cranes. Autom. Constr. 2016, 65, 133–143. [Google Scholar] [CrossRef]
- Rong, B.; Rui, X.; Tao, L.; Wang, G. Dynamics analysis and fuzzy anti-swing control design of overhead crane system based on Riccati discrete time transfer matrix method. Multibody Sys. Dyn. 2018, 43, 279–295. [Google Scholar] [CrossRef]
- Yang, T.; Qiu, W.; Ma, Y.; Chadli, M.; Zhang, L.X. Fuzzy model-based predictive control of dissolved oxygen in activated sludge processes. Neurocomputing 2014, 136, 88–95. [Google Scholar] [CrossRef]
- Spong, M. The swing up control problem for the acrobot. IEEE Control Sys. 1995, 15, 49–55. [Google Scholar]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Bao, H. An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes. Appl. Sci. 2018, 8, 1463. https://doi.org/10.3390/app8091463
Ma X, Bao H. An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes. Applied Sciences. 2018; 8(9):1463. https://doi.org/10.3390/app8091463
Chicago/Turabian StyleMa, Xianghua, and Hanqiu Bao. 2018. "An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes" Applied Sciences 8, no. 9: 1463. https://doi.org/10.3390/app8091463
APA StyleMa, X., & Bao, H. (2018). An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes. Applied Sciences, 8(9), 1463. https://doi.org/10.3390/app8091463