Battery Aging Prediction Using Input-Time-Delayed Based on an Adaptive Neuro-Fuzzy Inference System and a Group Method of Data Handling Techniques



Abstract
:1. Introduction:
- (1)
- Coupling renewable energy systems with different generation characteristics in wider distribution via the transmission grids;
- (2)
- Responding to the demand by adapting consumption patterns;
- (3)
- Employing fossil-fueled utilities as a traditional back-up (either for meeting peak demand or providing spinning reserve); and
- (4)
- Equipping the grid with storage devices such as compressed air storage, battery storage, and hydro pump storage.
Motivation, Objective, and Innovation Contribution
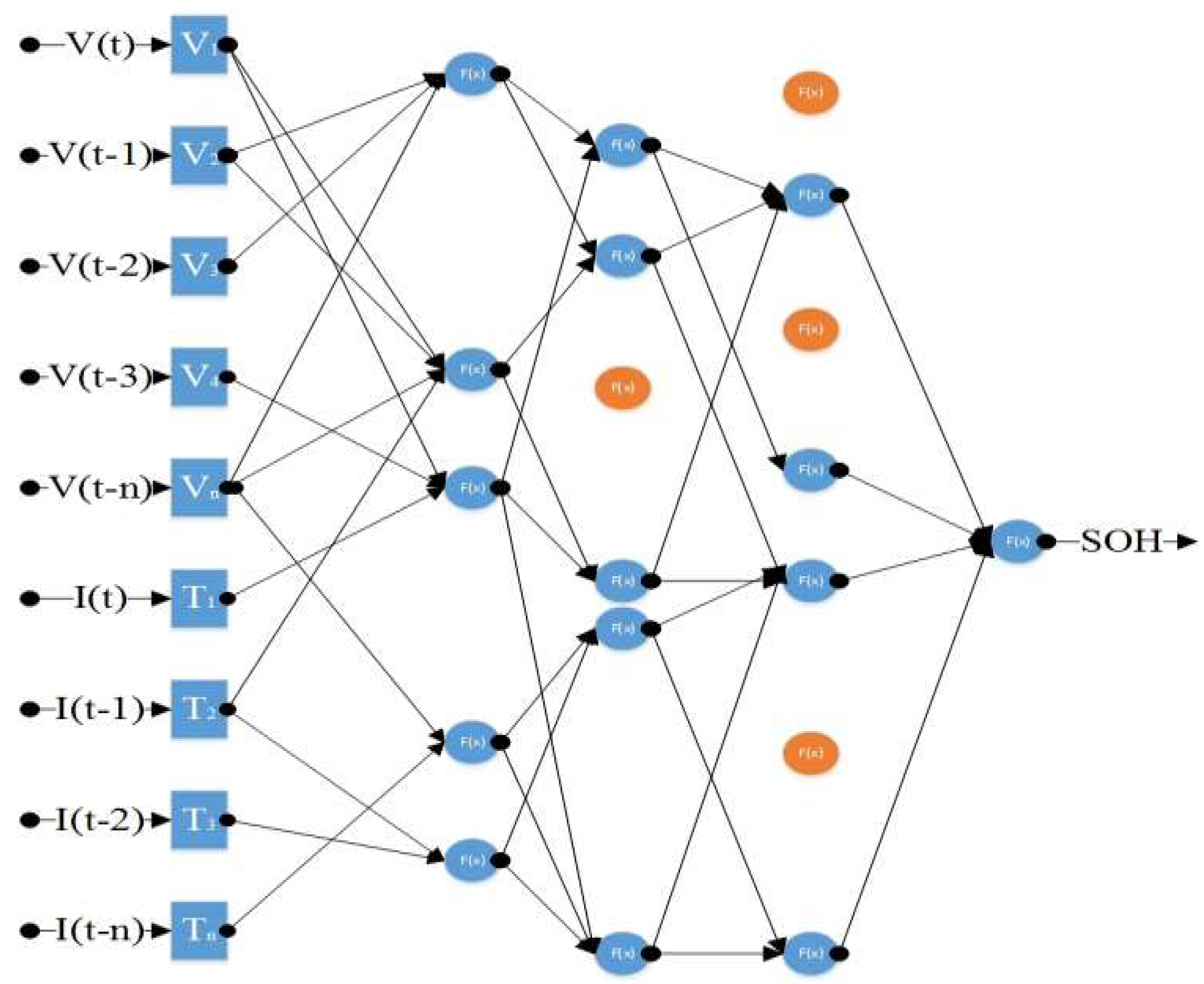
- Employing an input time-delayed strategy to handle dynamic information of system.
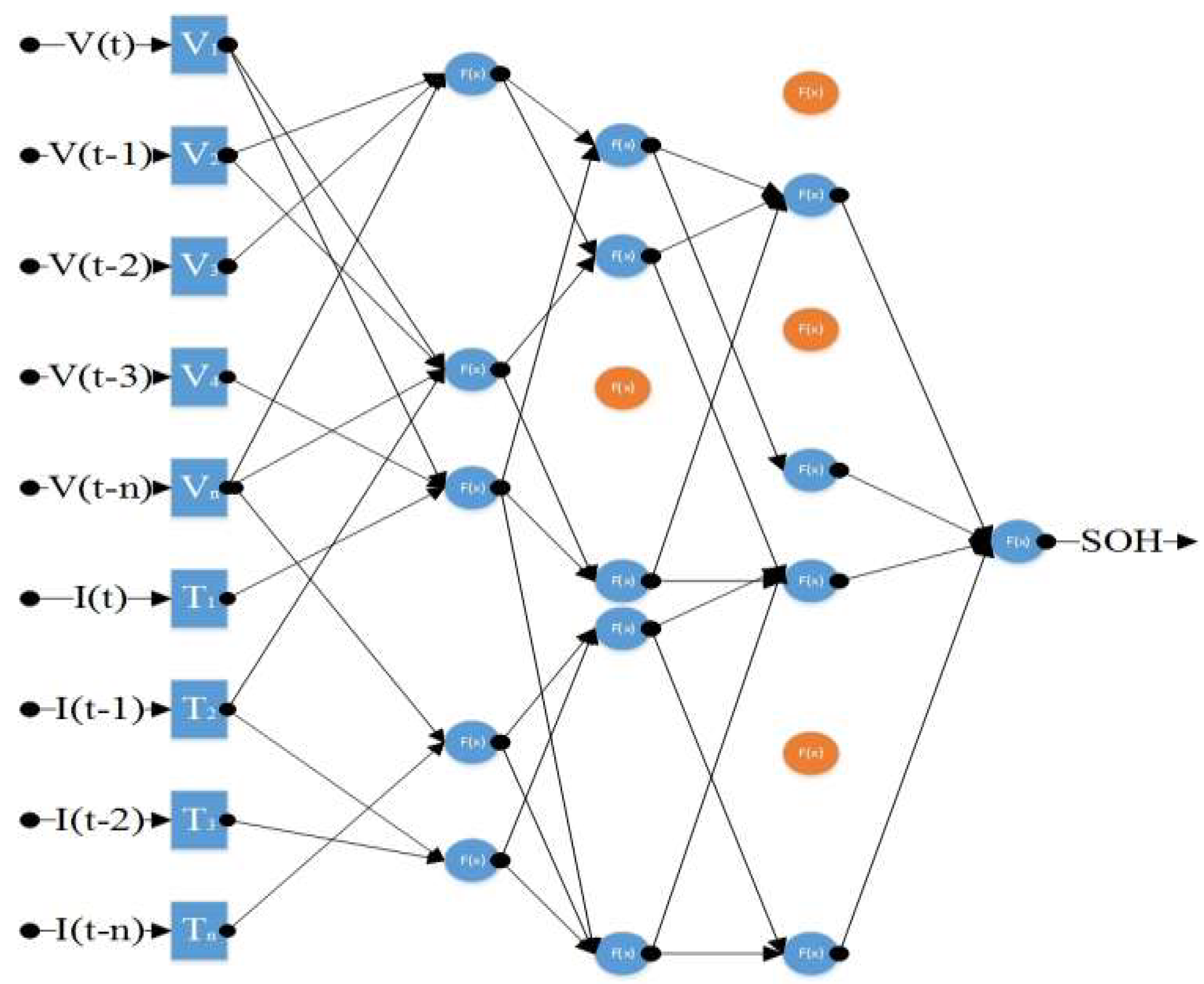
- The Adaptive Neruo-fuzzy Inference System (ANFIS) and group method of data handling (GMDH) techniques are employed to analyze the relational grade between the SOH and selected features.
- Developing two data-driven frameworks to estimate the SOH. This article utilizes the fuzzy C-means clustering algorithm to tune and adjust the ANFIS parameter in advance, to create the initial rules.
- Accurate and effective validation of the framework in comparison to recently published articles and other methods.
2. Proposed Techniques
2.1. Group Method of Data Handling
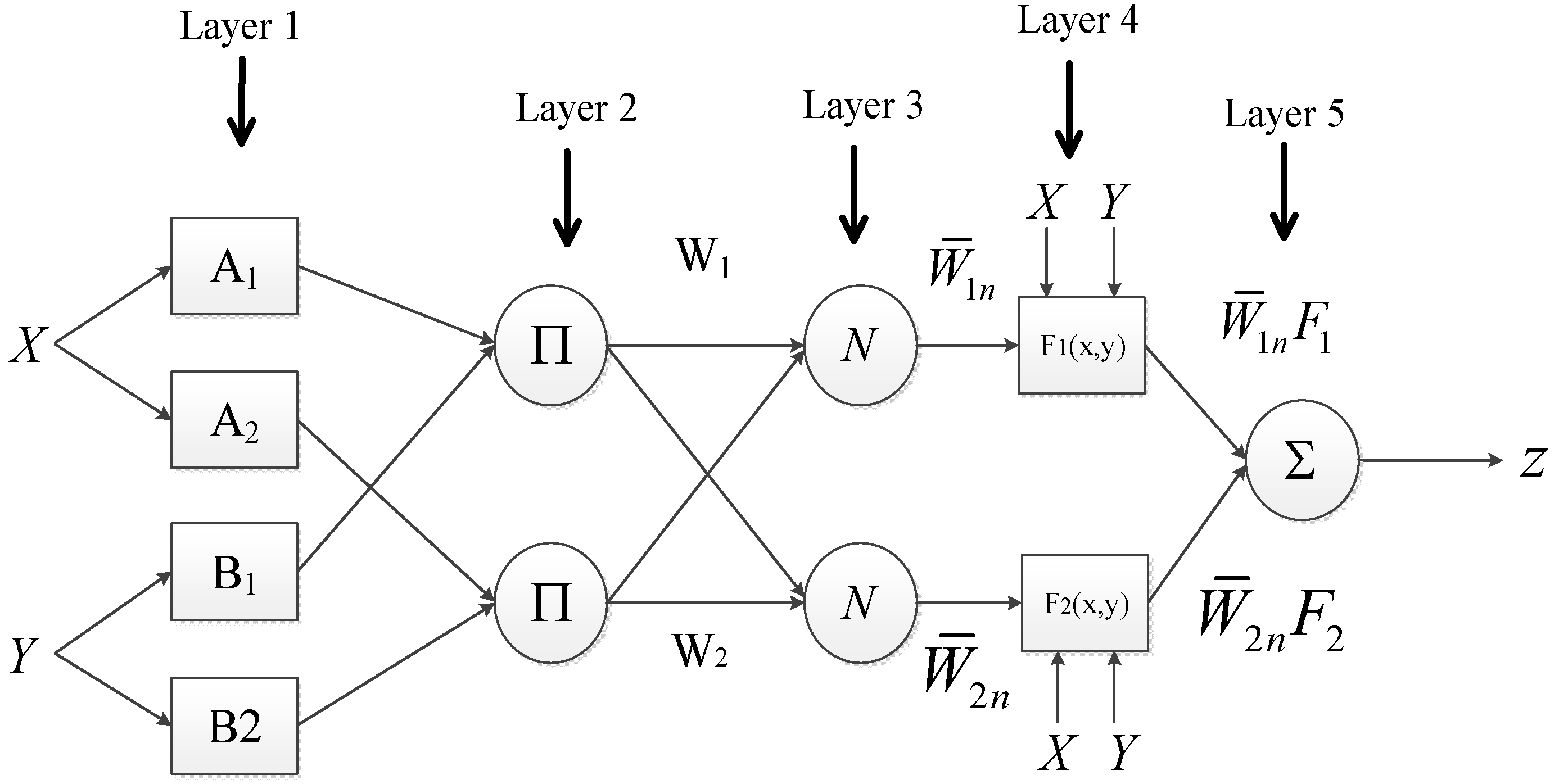
2.2. Adaptive Neuro-Fuzzy Inference system
- Layer 1
- This layer is known as fuzzy-fication layer, which fuzzifies the input variables; every i node consists of a node function, which is , symbolized by , where is the linguistic label according to the node function, is the input to the node, and is the membership function of that, specifying the level for the assumed x. Hence, the membership function ascertains the membership level from the given input values. For a bell-shaped function, three parameters for each node should be defined, for which the maximum and minimum possible value are 1 and 0, respectively; where its generalized function can be mathematically described as follows:where are the set parameters, called as premise parameters, is commonly chosen as bell-shaped or gauss-shaped, is the first input variable, and the membership function variables are adjusted by changing the aforementioned parameters whenever the first input variable is fed to the ANFIS.
- Layer 2
- Is called ‘fuzzy and’, because in this layer, only ‘AND’ operators are allowed. This layer is utilized to compute the firing robustness of every rule. It means product operation (see Equation [5]) referred to the weighting factor of the corresponding rule, is used.
- Layer 3
- Is known as ‘normalization’ term. The firing strength of each rule is normalized via computing the ration of each rule’s firing strength to the total of each rules. In Equation (6), is defined as the firing strength of each rule, as illustrated below:
- Layer 4
- Is recognized as ‘defuzzification’. This layer tries to compute the output of the previous layer, based on its node function; each node function is adaptive in accordance with the node function, as given by Equation (7).where is the output of the third layer and the parameters are set parameters, which are being assumed by the conditions of the determined parameter. The parameters in the fuzzy inference layer are considered as consequent parameters.
- Layer 5
- Is called ‘aggregation’. This layer is utilized to compute the total of the outputs of all of the rules to produce the overall ANFIS output, whose equation is represented as follows:
3. Result and Discussion
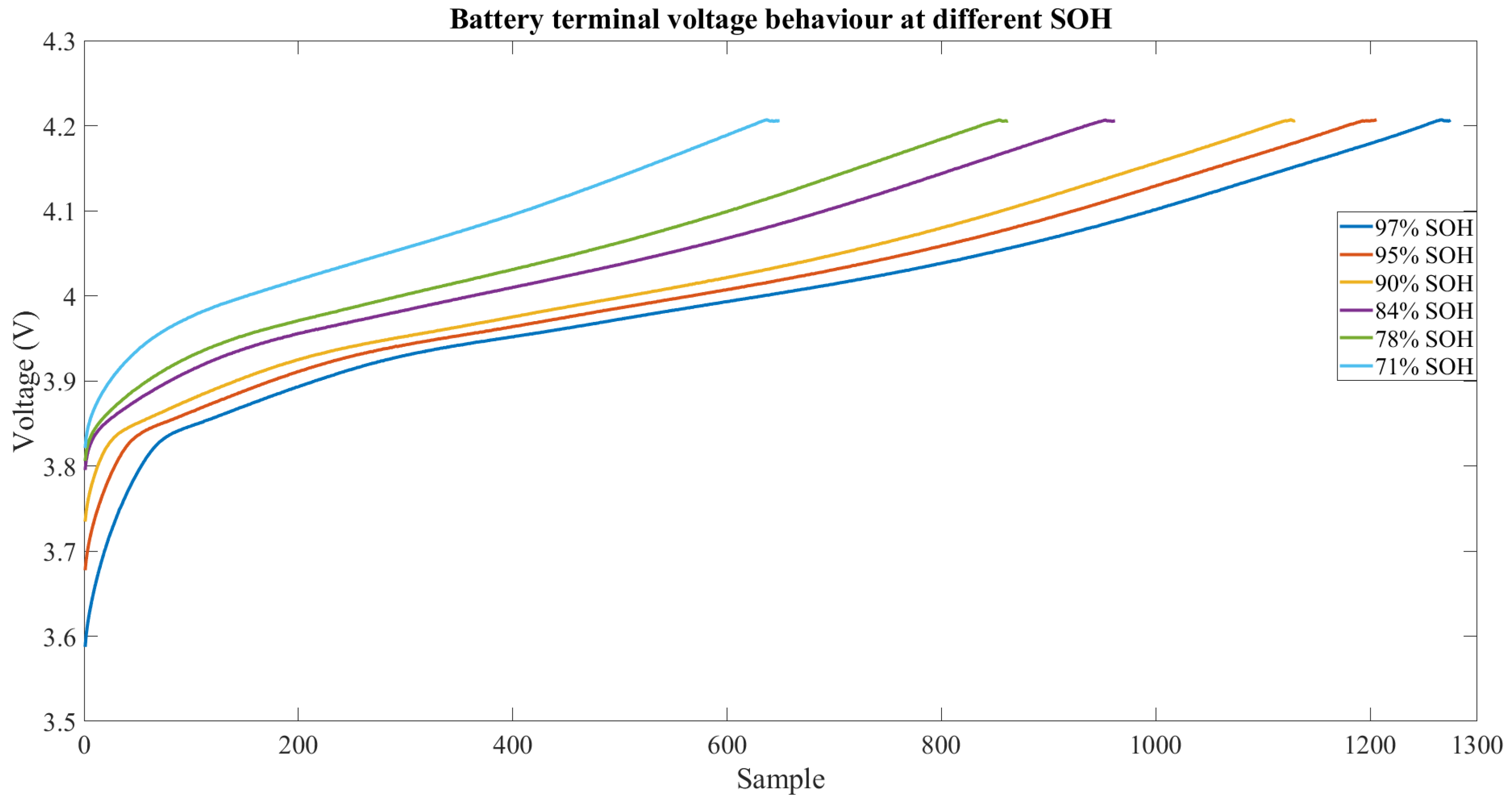
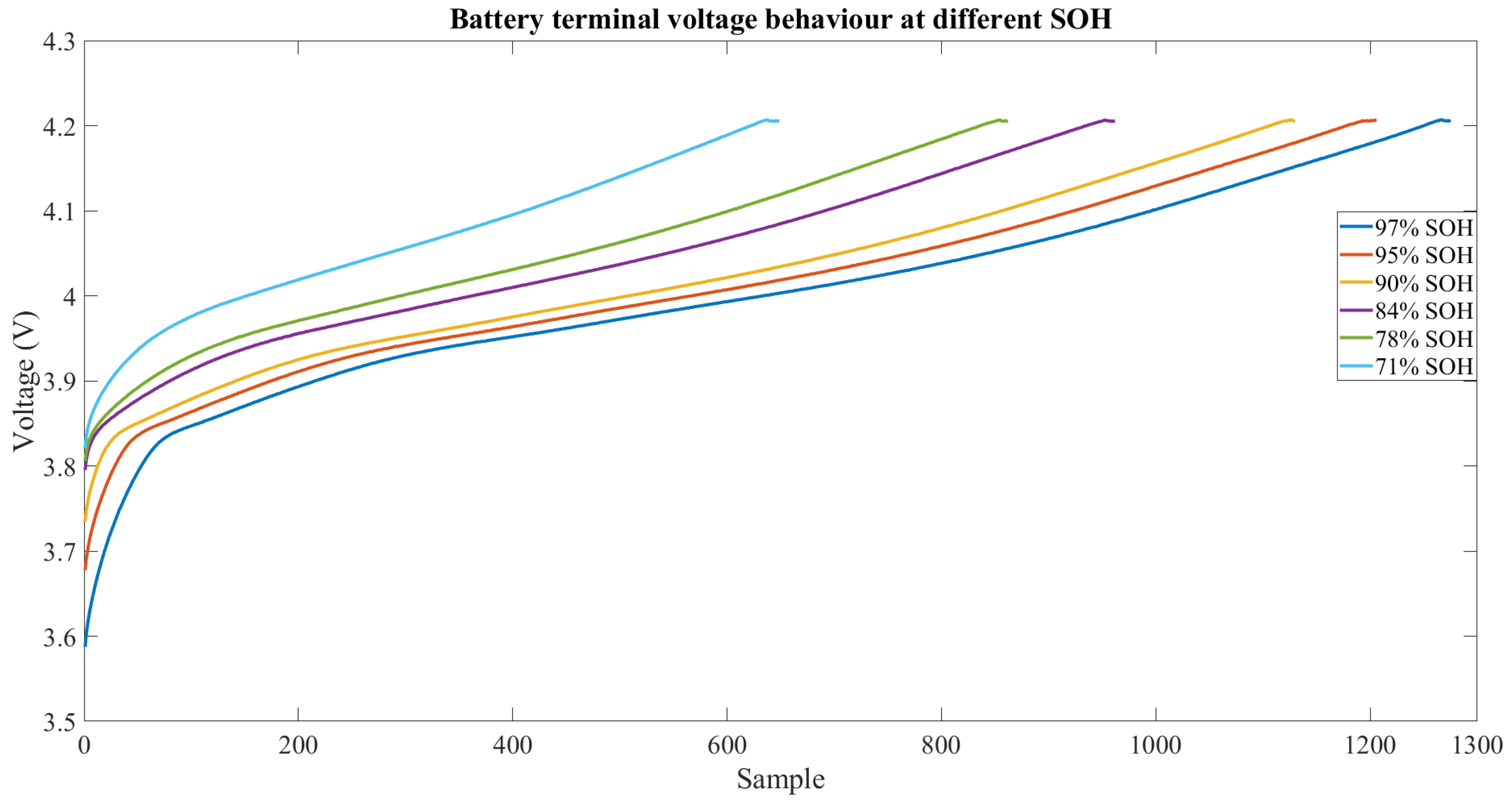
3.1. Experimental Data
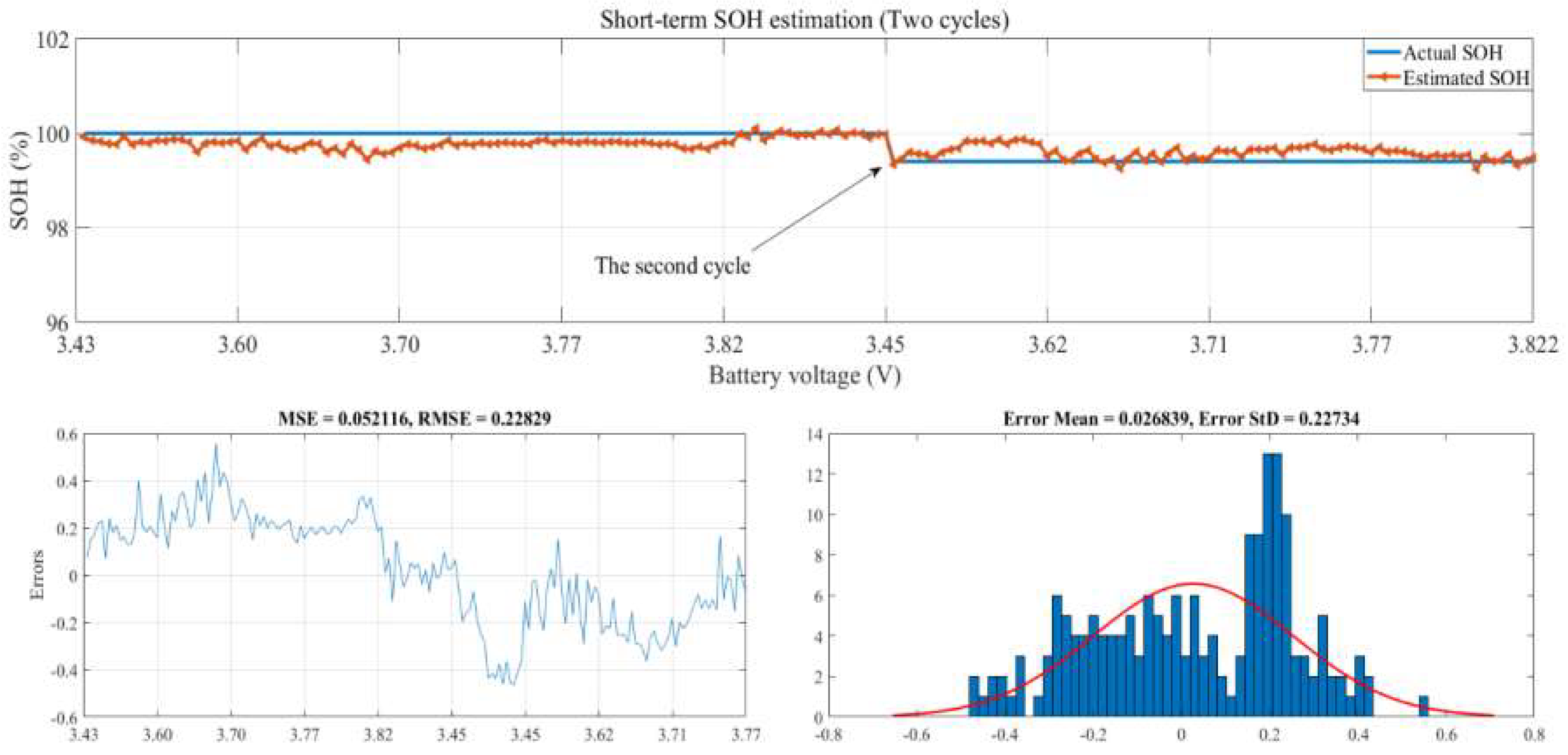
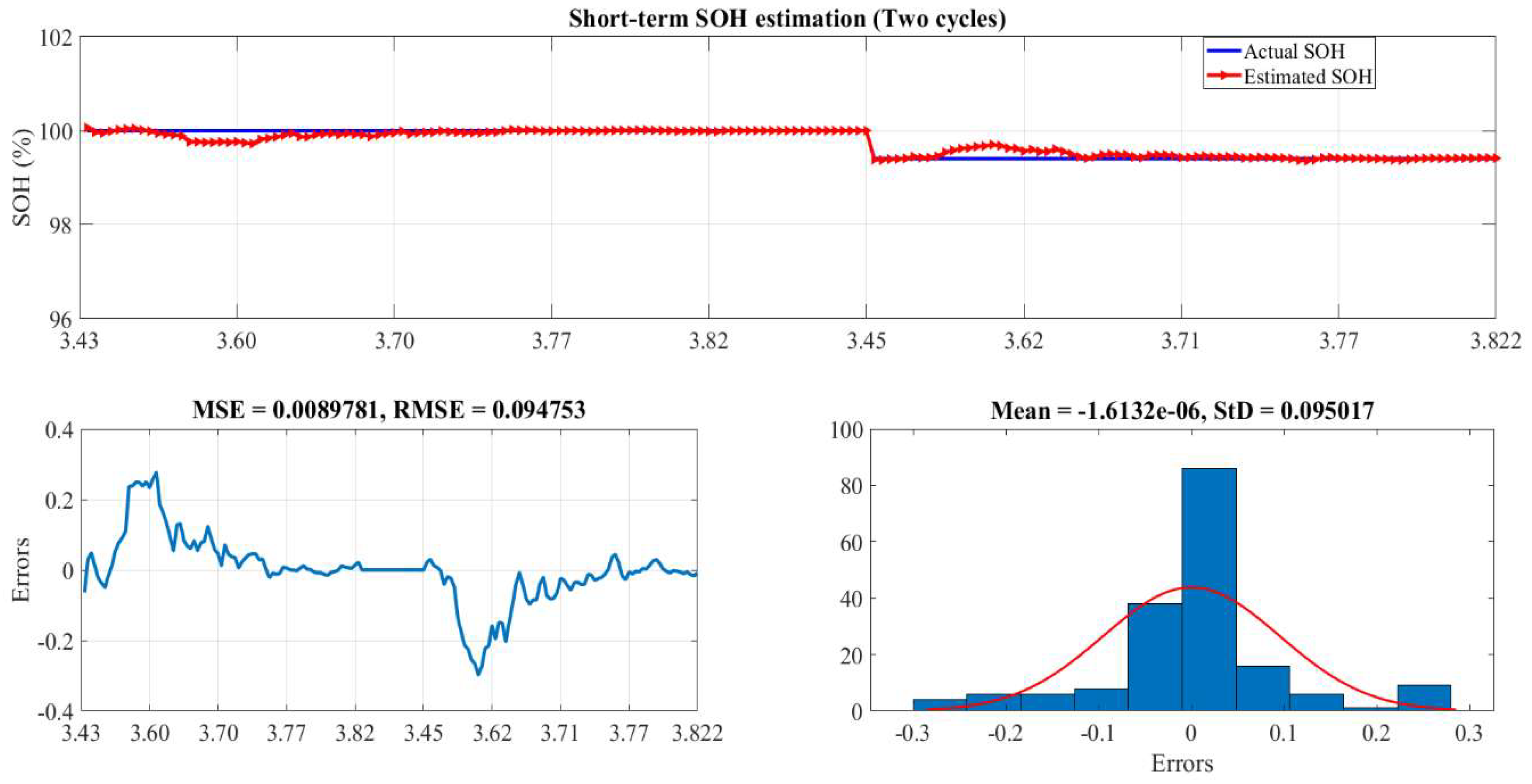
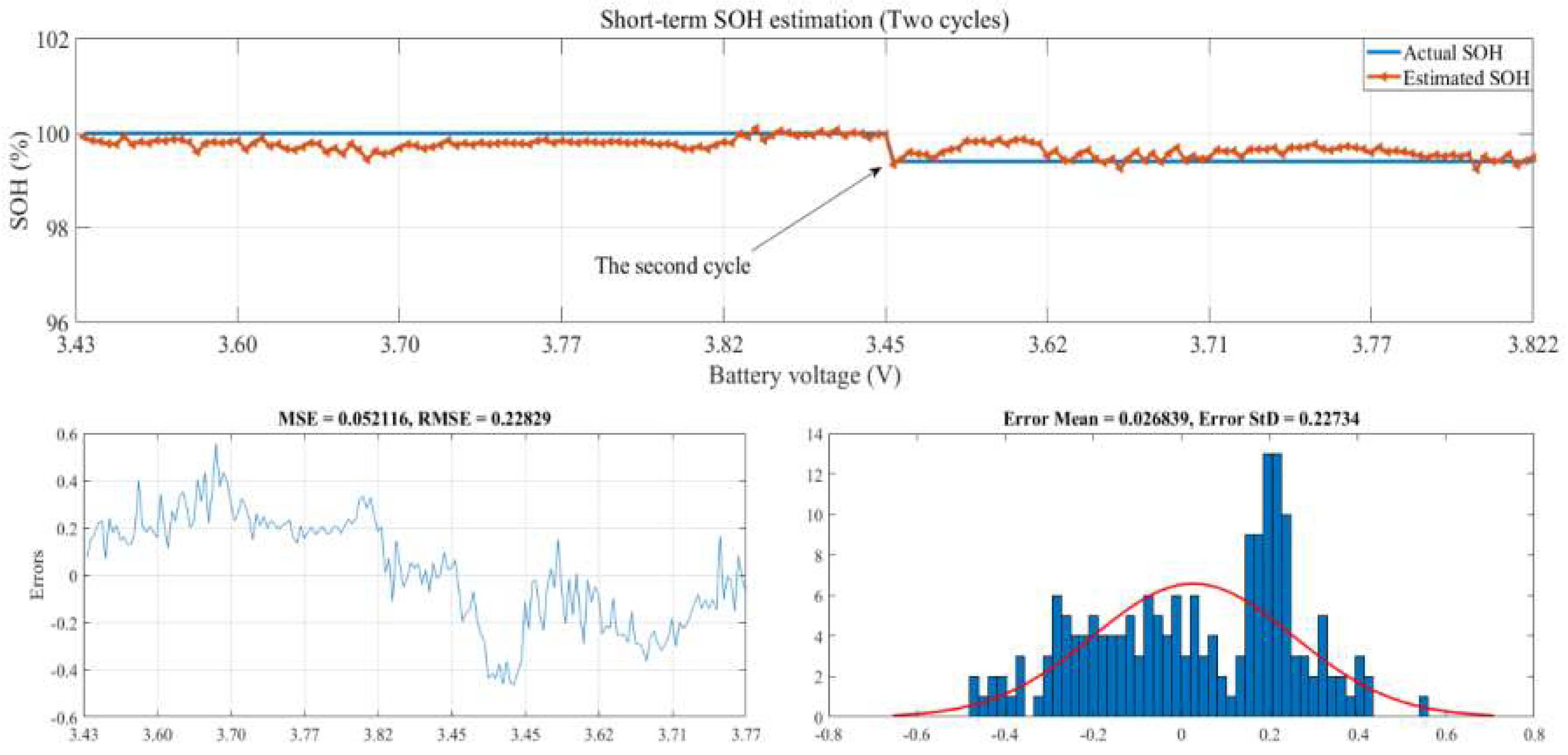
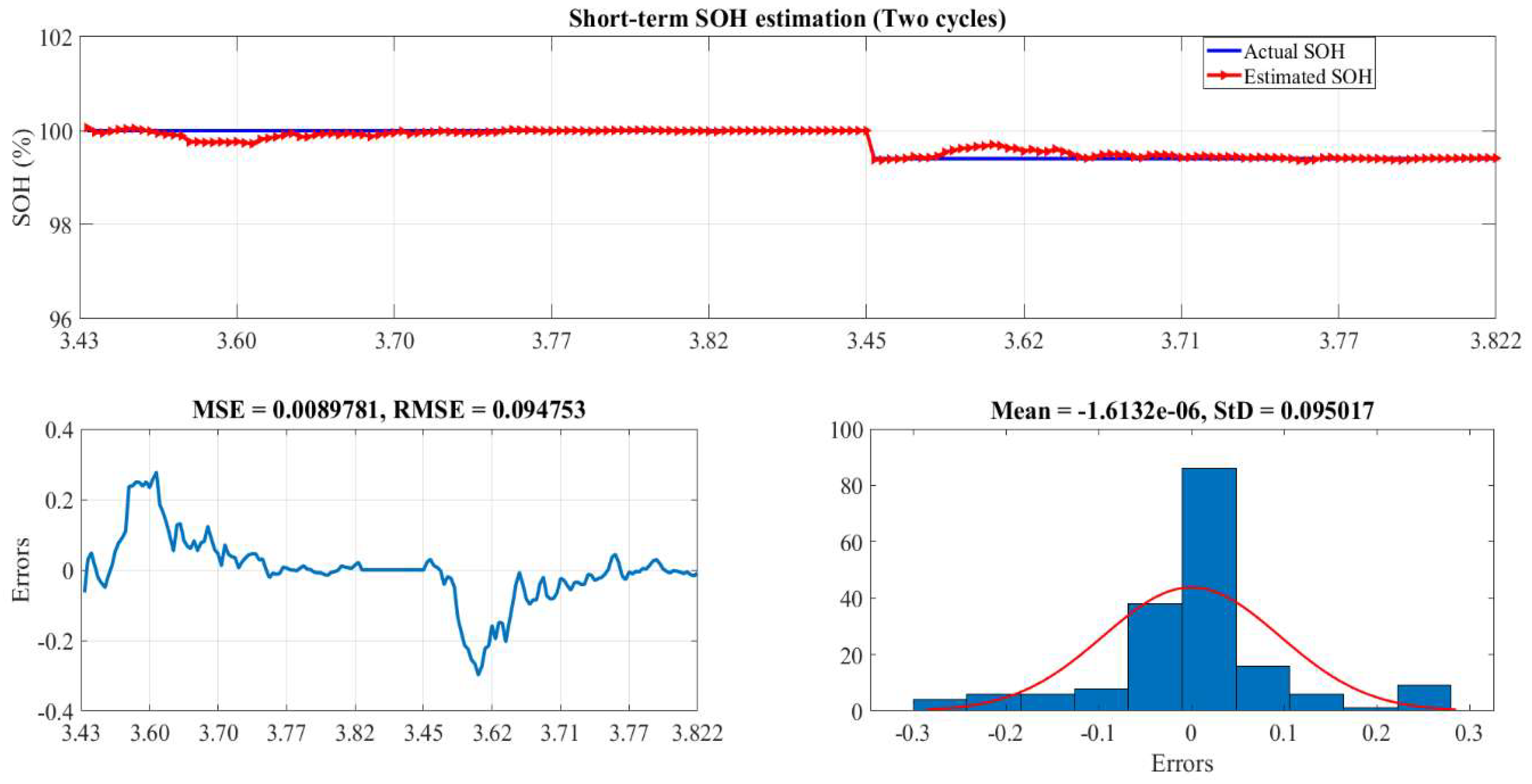
3.2. Short-Term State of Health Estimation
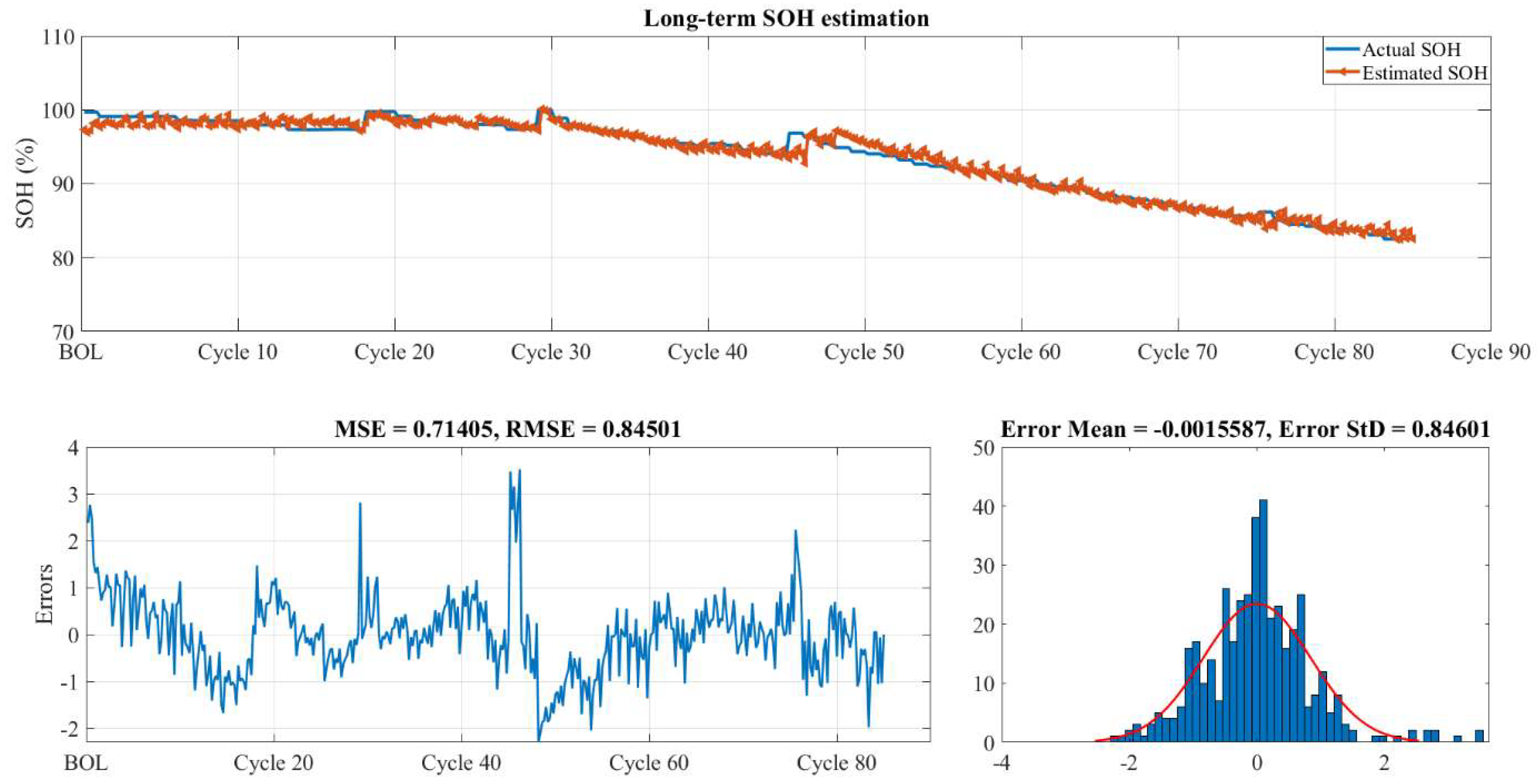
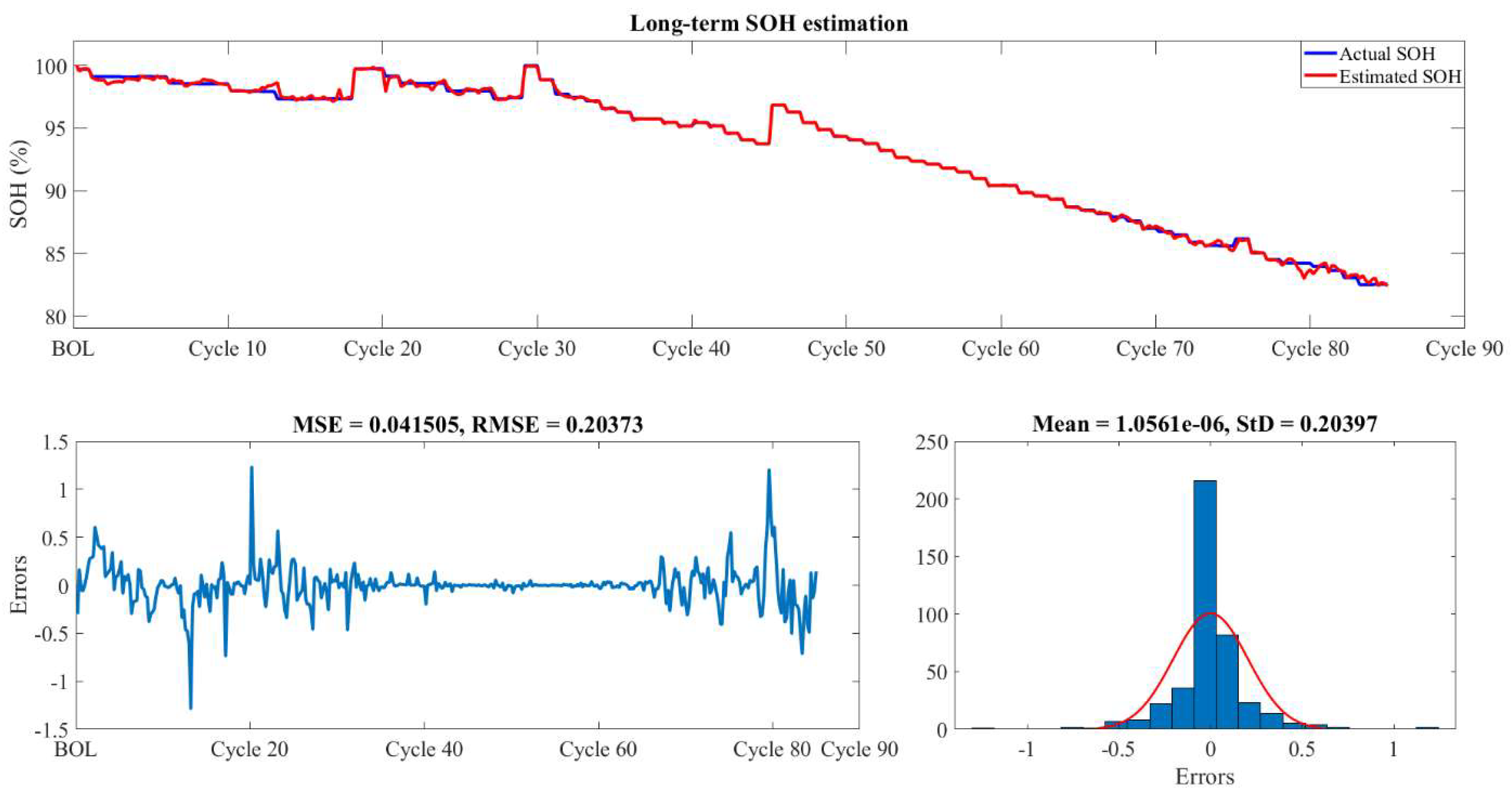
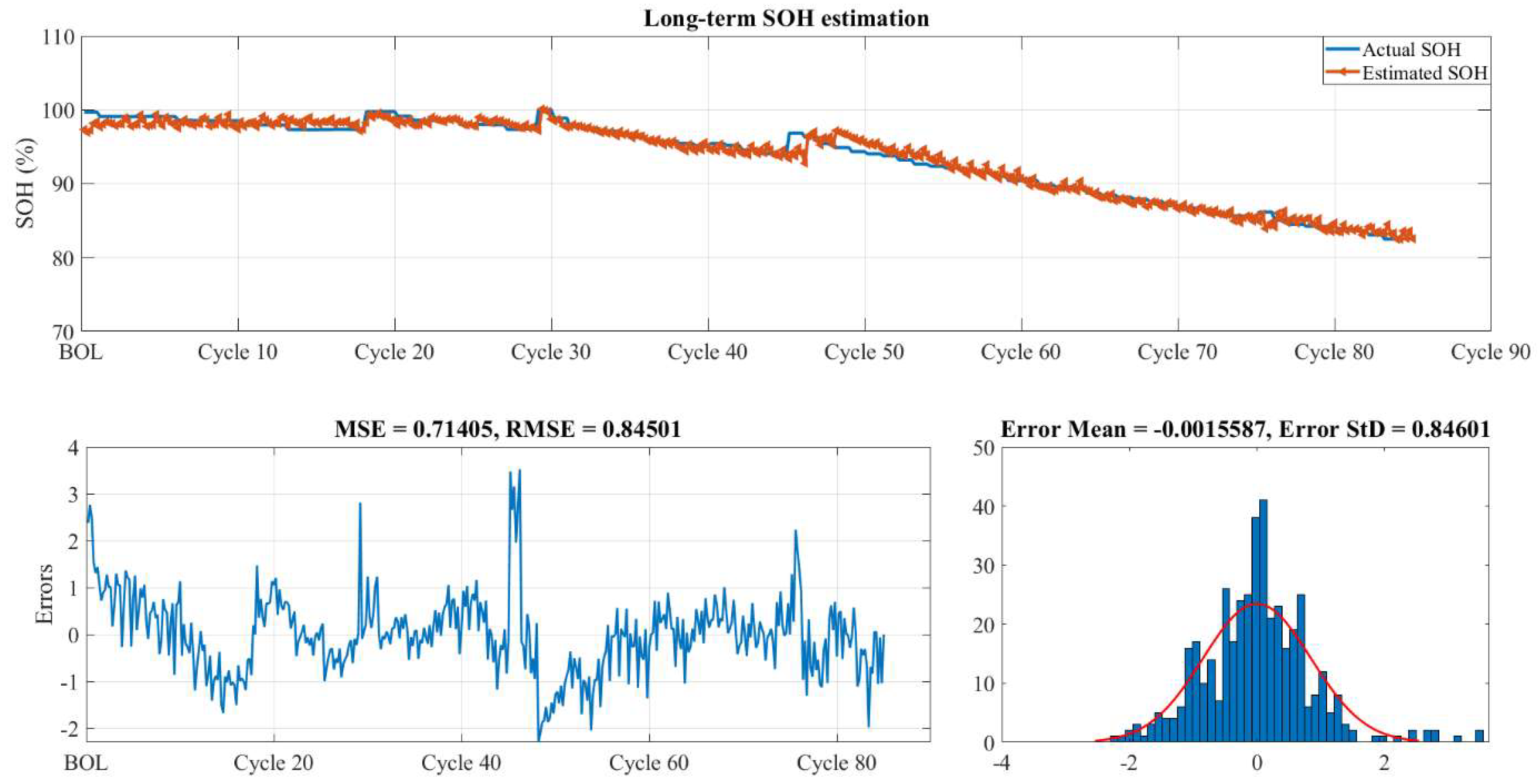
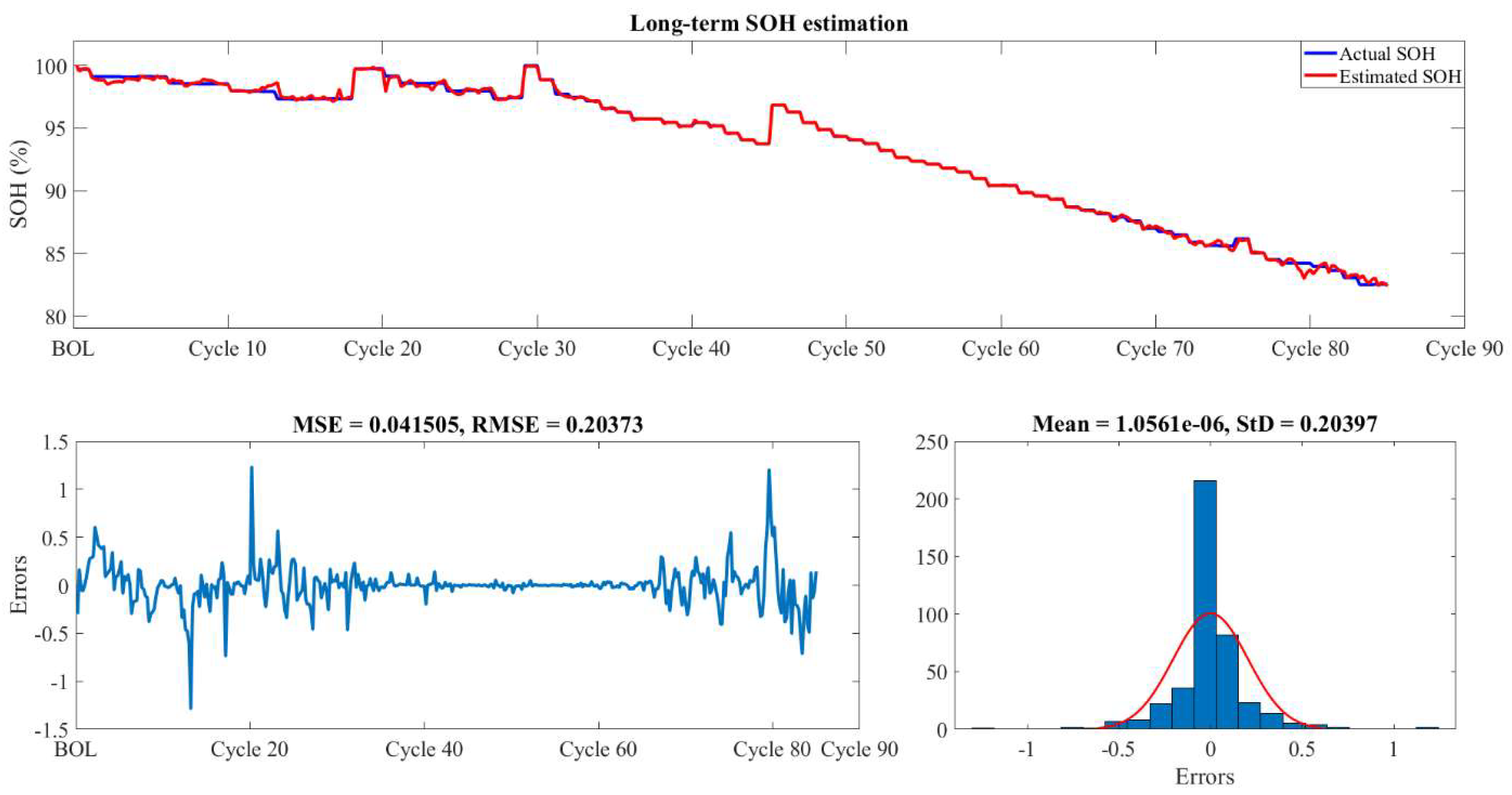
3.3. Long-Term State of Health Estimation
- While machine learning demonstrated an acceptable self-adaptation and high non-linearity modeling capability, a large amount of experimental data is required to obtain a high accuracy.
- Although the introduced SOH method is more predictable and accurate under charging and discharging processes, it is not a usable method for plug-in hybrid electric vehicles (PHEVs)/PEVs when they are connected to smart charging infrastructure.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | artificial neural network |
| ANFIS | adaptive neruo-fuzzy inference system |
| BMS | battery management system |
| CC | constant current |
| CV | constant voltage |
| DG | distributed generation |
| DGA | geometry based approach |
| ESS | energy storage system |
| EV | electric vehicle |
| EKF | extended Kalman filter |
| G2V | grid-to-vehicle |
| GHG | greenhouse gas |
| GMDH | group method of data handling |
| GP | Gaussian process |
| HRES | hybrid renewable energy system |
| ITDNN | input time-delayed neural network |
| KF | Kalman filter |
| LS | least squares |
| NN | neural network |
| NEDC | new European driving cycle |
| MSE | mean squared error |
| PS | power system |
| PF | particle filter |
| QGPFR | quadratic polynomial mean function (GP) |
| RMSE | root mean square error |
| RBC | remaining battery capacity |
| SG | smart grid |
| SOC | state of charge |
| SOH | state of health |
| V2G | vehicle-to-grid |
| NPF | nonlinear predictive filter |
| MSE | mean square error |
| OCV | open circuit voltage |
| PHEV | plug-in hybrid electric vehicle |
Nomenclature
| estimated values | |
| expected values | |
| number of input variables | |
| pairs of input variables | |
| membership function | |
| linguistic label | |
| Input variables | |
| model coefficient |
References
- U.S. Energy Information Administration. International Energy Outlook 2017. 2017. Available online: https://www.csis.org/events/eias-international-energy-outlook-2017 (accessed on 1 August 2018).
- Rahbari, O.; Omar, N.; Firouz, Y.; Rosen, M.A.; Goutam, S.; Van Den Bossche, P.; Van Mierlo, J. A novel state of charge and capacity estimation technique for electric vehicles connected to a smart grid based on inverse theory and a metaheuristic algorithm. Energy 2018, 155, 1047–1058. [Google Scholar] [CrossRef]
- Rahbari, O.; Vafaeipour, M.; Omar, N.; Rosen, M.A.; Hegazy, O.; Timmermans, J.; Heibati, S.; Van DenBosschea, P. An optimal versatile control approach for plug-in electric vehicles to integrate renewable energy sources and smart grids. Energy 2017, 134, 1053–1067. [Google Scholar] [CrossRef]
- Rahbari, O.; Omar, N.; Van Den Bossche, P.; Van Mierlo, J. A centralized state of charge estimation technique for electric vehicles equipped with lithium-ion batteries in smart grid environment. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 1721–1725. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C.; Gualous, H. Aging prediction and state of charge estimation of a LiFePO4 battery using input time-delayed neural networks. Electr. Power Syst. Res. 2017, 146, 189–197. [Google Scholar] [CrossRef]
- Safari, M. Battery electric vehicles: Looking behind to move forward. Energy Policy 2018, 115, 54–65. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Uwe, D. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Yang, D.; Wang, Y.; Pan, R.; Chen, R.; Chen, Z. State-of-health estimation for the lithium-ion battery based on support vector regression. Appl. Energy 2017. [Google Scholar] [CrossRef]
- Dey, S.; Ayalew, B.; Pisu, P. Combined Estimation of State-of-Charge and State-of-Health of Li-ion Battery Cells Using SMO on Electrochemical Model. In Proceedings of the IEEE Workshop on Variable Structure Systems, Nantes, France, 29 June–2 July 2014. [Google Scholar]
- Pan, H.; Lü, Z.; Wang, H.; Wei, H.; Chen, L. Novel battery state-of-health online estimation method using multiple health indicators and an extreme learning machine. Energy 2018, 160, 466–477. [Google Scholar] [CrossRef]
- Marcicki, J.; Canova, M.; Conlisk, A.T.; Rizzoni, G. Design and parametrization analysis of a reduced-order electrochemical model of graphite/LiFePO4 cells for SOC/SOH estimation. J. Power Sources 2013, 237, 310–324. [Google Scholar] [CrossRef]
- Tong, S.; Klein, M.P.; Park, J.W. On-line optimization of battery open circuit voltage for improved state-of-charge and state-of-health estimation. J. Power Sources 2015, 293, 416–428. [Google Scholar] [CrossRef]
- Li, X.; Jiang, J.; Yi, L.; Chen, D.; Zhang, Y.; Zhang, C. A capacity model based on charging process for state of health estimation of lithium ion batteries. Appl. Energy 2016, 177, 537–543. [Google Scholar] [CrossRef]
- Zhang, C.; Alla, W.; Dinh, Q.; Ascencio, P.; Marco, J. Online estimation of battery equivalent circuit model parameters and state of charge using decoupled least squares technique. Energy 2018, 142, 678–688. [Google Scholar] [CrossRef]
- Du, J.; Liu, Z.; Wang, Y.; Wen, C. An adaptive sliding mode observer for lithium-ion battery state of charge and state of health estimation in electric vehicles. Control Eng. Pract. 2016, 54, 81–90. [Google Scholar] [CrossRef]
- Yang, D.; Zhang, X.; Pan, R.; Wang, Y.; Chen, Z. A novel Gaussian process regression model for state-of-health estimation of lithium-ion battery using charging curve. J. Power Sources 2018, 384, 387–395. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Yann, B. Inline state of health estimation of lithium-ion batteries using state of charge calculation. J. Power Sources 2015, 299, 246–254. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Fu, Y.; Xu, J.; Gong, X. Online battery state of health estimation based on Genetic Algorithm for electric and hybrid vehicle applications. J. Power Sources 2013, 240, 184–192. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- Andre, D.; Appel, C.; Soczka-guth, T.; Uwe, D. Advanced mathematical methods of SOC and SOH estimation for lithium-ion batteries. J. Power Sources 2013, 224, 20–27. [Google Scholar] [CrossRef]
- Li, Y.; Chattopadhyay, P.; Xiong, S.; Ray, A.; Rahn, C.D. Dynamic data-driven and model-based recursive analysis for estimation of battery state-of-charge q. Appl. Energy 2016, 184, 266–275. [Google Scholar] [CrossRef]
- Rahbari, O.; Vafaeipour, M.; Fazelpour, F.; Feidt, M.; Rosen, M.A. Towards realistic designs of wind farm layouts: Application of a novel placement selector approach. Energy Convers. Manag. 2014, 81, 242–254. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Bertrand, N.; Delétage, J.; Vinassa, J. Electrical Power and Energy Systems Behavior and state-of-health monitoring of Li-ion batteries using impedance spectroscopy and recurrent neural networks. Int. J. Electr. Power Energy Syst. 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Zhang, X.; Chen, Z. A novel state of health estimation method of Li-ion battery using group method of data handling. J. Power Sources 2016, 327, 457–464. [Google Scholar] [CrossRef]
- El Mejdoubi, A.; Oukaour, A.; Chaoui, H.; Gualous, H.; Sabor, J.; Slamani, Y. State-of-Charge and State-of-Health Lithium-Ion Batteries’ Diagnosis According to Surface Temperature Variation. IEEE Trans. Ind. Electr. 2016, 63, 2391–2402. [Google Scholar] [CrossRef]
- Ng, S.S.Y.; Xing, Y.; Tsui, K.L. A naive Bayes model for robust remaining useful life prediction of lithium-ion battery. Appl. Energy 2014, 118, 114–123. [Google Scholar] [CrossRef]
- Baghdadi, I.; Briat, O.; Gyan, P.; Vinassa, J.M. State of health assessment for lithium batteries based on voltage-time relaxation measure. Electrochim. Acta 2016, 194, 461–472. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Vinassa, J. Determination of lithium-ion battery state-of-health based on constant-voltage charge phase. J. Power Sources 2014, 258, 218–227. [Google Scholar] [CrossRef]
- Weng, C.; Sun, J.; Peng, H. A unified open-circuit-voltage model of lithium-ion batteries for state-of-charge estimation and state-of-health monitoring. J. Power Sources 2014, 258, 228–237. [Google Scholar] [CrossRef]
- Einhorn, M.; Conte, F.V.; Kral, C.; Fleig, J. A Method for Online Capacity Estimation of Lithium Ion Battery Cells Using the State of Charge and the Transferred Charge. IEEE Trans. Ind. Appl. 2012, 48, 736–741. [Google Scholar] [CrossRef]
- Yang, J.; Xia, B.; Huang, W.; Fu, Y.; Mi, C. Online state-of-health estimation for lithium-ion batteries using constant-voltage charging current analysis. Appl. Energy 2018, 212, 1589–1600. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; Malvoni, M.; Congedo, P.M. Comparison of strategies for multi-step ahead photovoltaic power forecasting models based on hybrid group method of data handling networks and least square support vector machine. Energy 2016, 107, 360–373. [Google Scholar] [CrossRef]
- Fleischer, C.; Waag, W.; Bai, Z.; Uwe, D. On-line self-learning time forward voltage prognosis for lithium-ion batteries using adaptive neuro-fuzzy inference system. J. Power Sources 2013, 243, 728–749. [Google Scholar] [CrossRef]
- Saha, B.G.K. Battery Data Set. NASA Ames Prognostics Data Repository 2007. Available online: https://ti.arc.nasa.gov/tech/dash/groups/pcoe/prognostic-data-repository/ (accessed on 1 May 2007).
- Shen, W.X.; Member, S.; Chan, C.C.; Lo, E.W.C.; Chau, K.T. Adaptive Neuro-Fuzzy Modeling of Battery Residual Capacity for Electric Vehicles. IEEE Trans. Ind. Electron. 2002, 49, 677–684. [Google Scholar] [CrossRef]
- Liu, D.; Pang, J.; Zhou, J.; Peng, Y.; Pecht, M. Prognostics for state of health estimation of lithium-ion batteries based on combination Gaussian process functional regression. Microelectron. Reliab. 2013, 53, 832–839. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Ref. [36] QGPFR | Ref. [16] GPR-SE | Ref. [24] GMDH-DGA | Present Study ANFIS | Present Study GMDH |
|---|---|---|---|---|---|
| RMSE (battery No. 06) | 5.12 | 1.7064 | - | 0.203 | 0.845 |
| MSE (battery No. 06) | - | - | 0.360 | 0.041 | 0.714 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahbari, O.; Mayet, C.; Omar, N.; Van Mierlo, J. Battery Aging Prediction Using Input-Time-Delayed Based on an Adaptive Neuro-Fuzzy Inference System and a Group Method of Data Handling Techniques. Appl. Sci. 2018, 8, 1301. https://doi.org/10.3390/app8081301
Rahbari O, Mayet C, Omar N, Van Mierlo J. Battery Aging Prediction Using Input-Time-Delayed Based on an Adaptive Neuro-Fuzzy Inference System and a Group Method of Data Handling Techniques. Applied Sciences. 2018; 8(8):1301. https://doi.org/10.3390/app8081301
Chicago/Turabian StyleRahbari, Omid, Clément Mayet, Noshin Omar, and Joeri Van Mierlo. 2018. "Battery Aging Prediction Using Input-Time-Delayed Based on an Adaptive Neuro-Fuzzy Inference System and a Group Method of Data Handling Techniques" Applied Sciences 8, no. 8: 1301. https://doi.org/10.3390/app8081301
APA StyleRahbari, O., Mayet, C., Omar, N., & Van Mierlo, J. (2018). Battery Aging Prediction Using Input-Time-Delayed Based on an Adaptive Neuro-Fuzzy Inference System and a Group Method of Data Handling Techniques. Applied Sciences, 8(8), 1301. https://doi.org/10.3390/app8081301