Trajectory Tracking between Josephson Junction and Classical Chaotic System via Iterative Learning Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Rossler Chaotic and RCL-Shunted Josephson Junction System
2.1. System Description and Transformation
2.2. Trajectory Tracking between Systems via the Iterative Learning Control
2.3. Lyapunov Stability of Systems
3. Results and Discussion
3.1. Deciding Iterative Control Learning Law
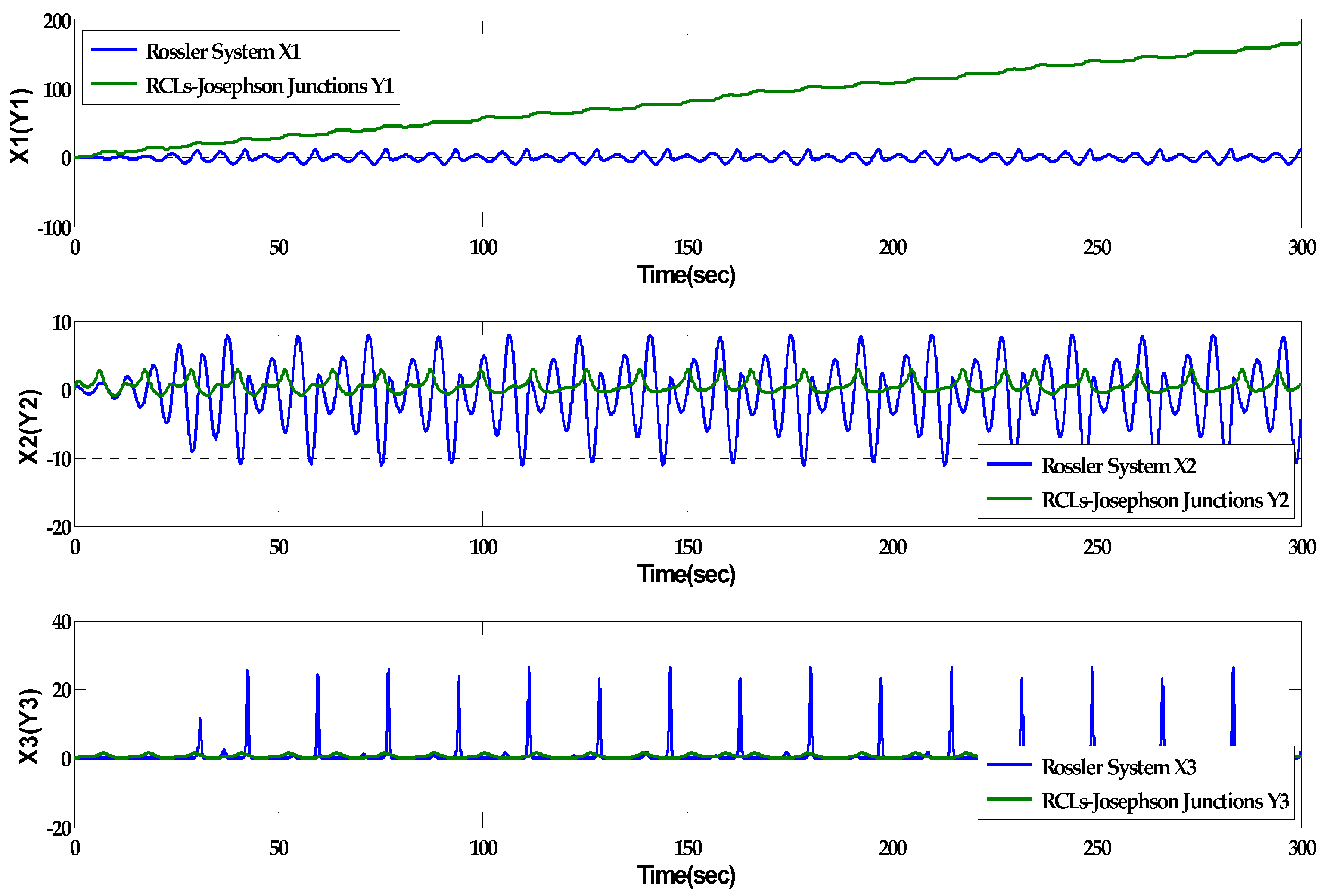
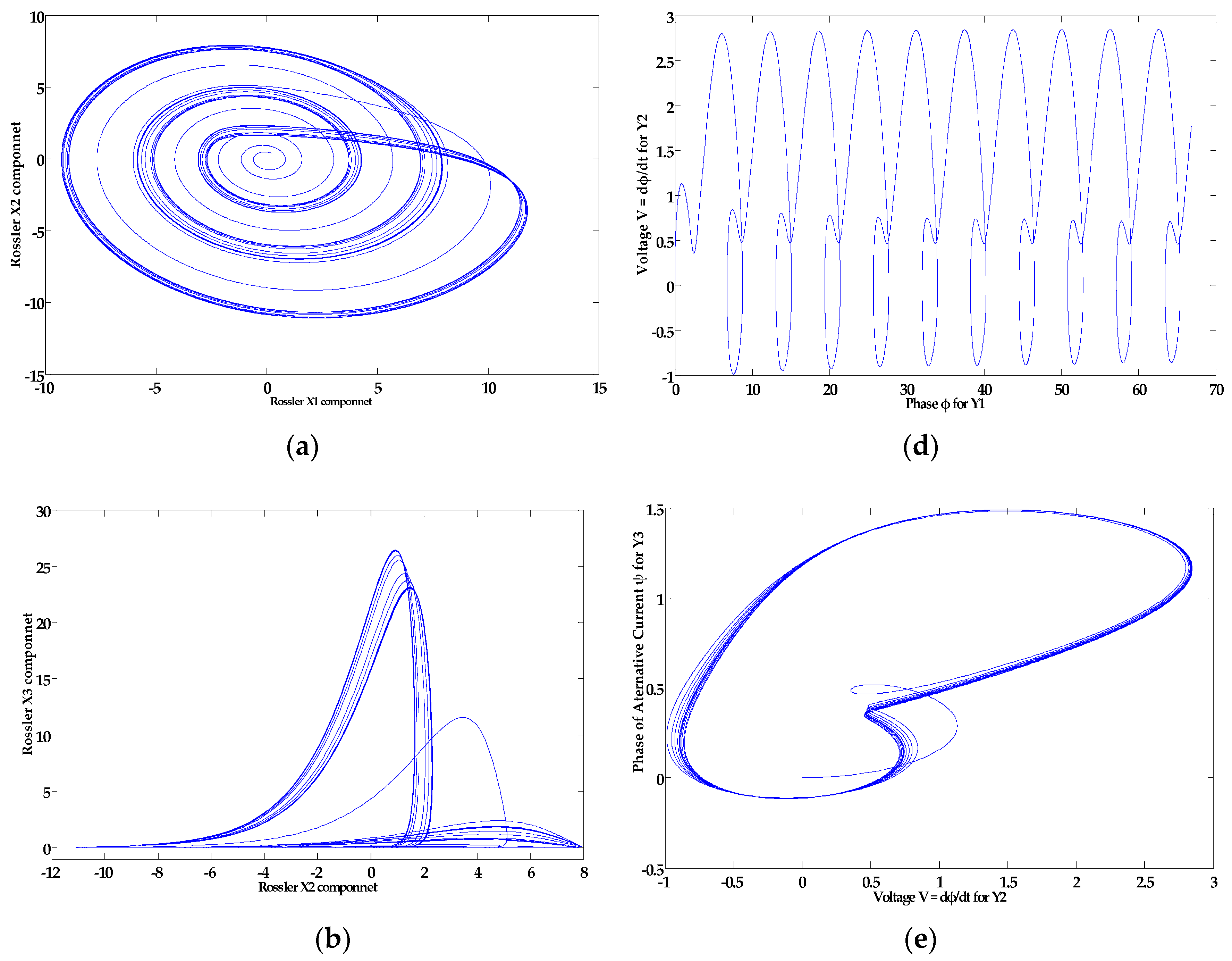
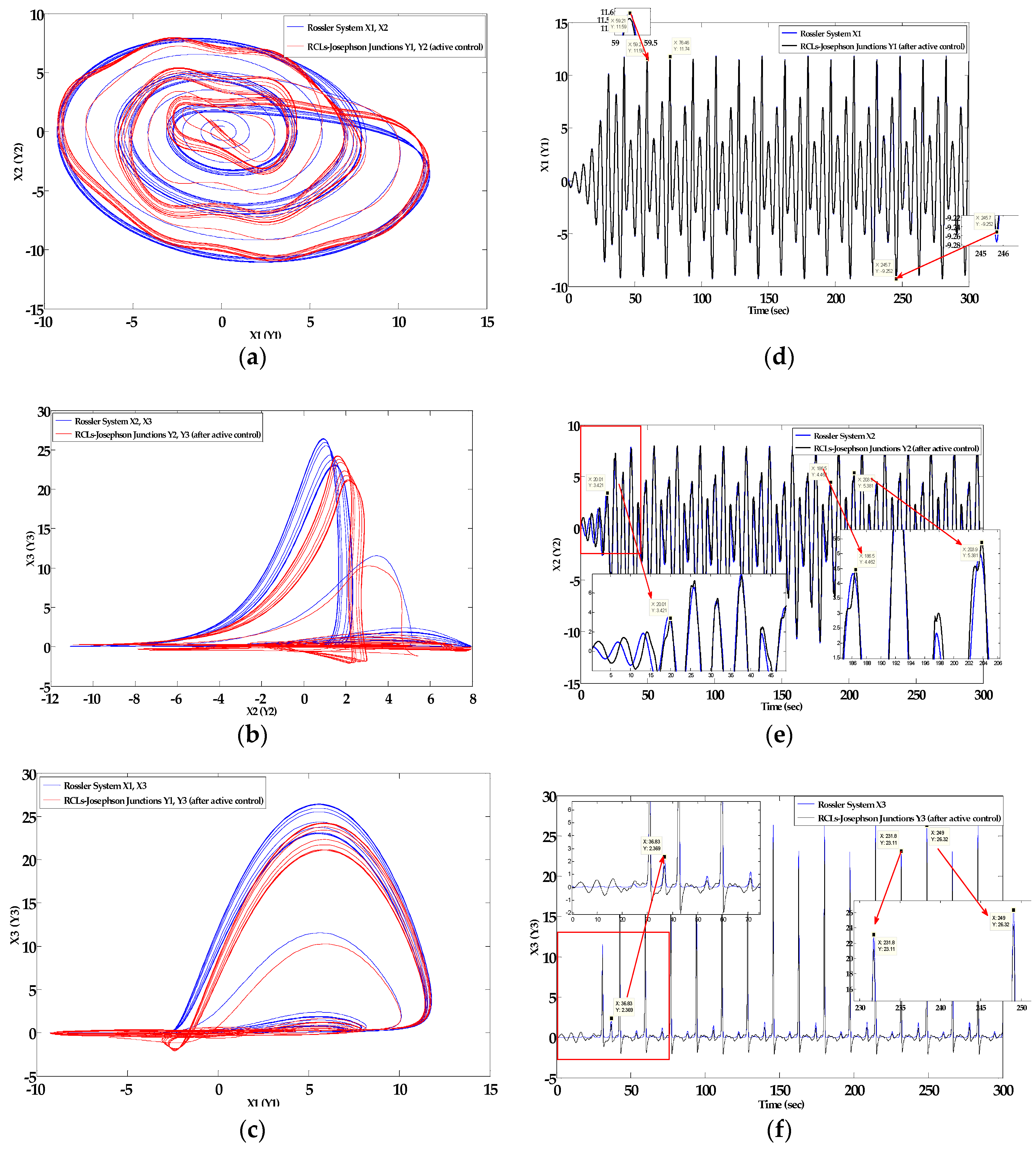
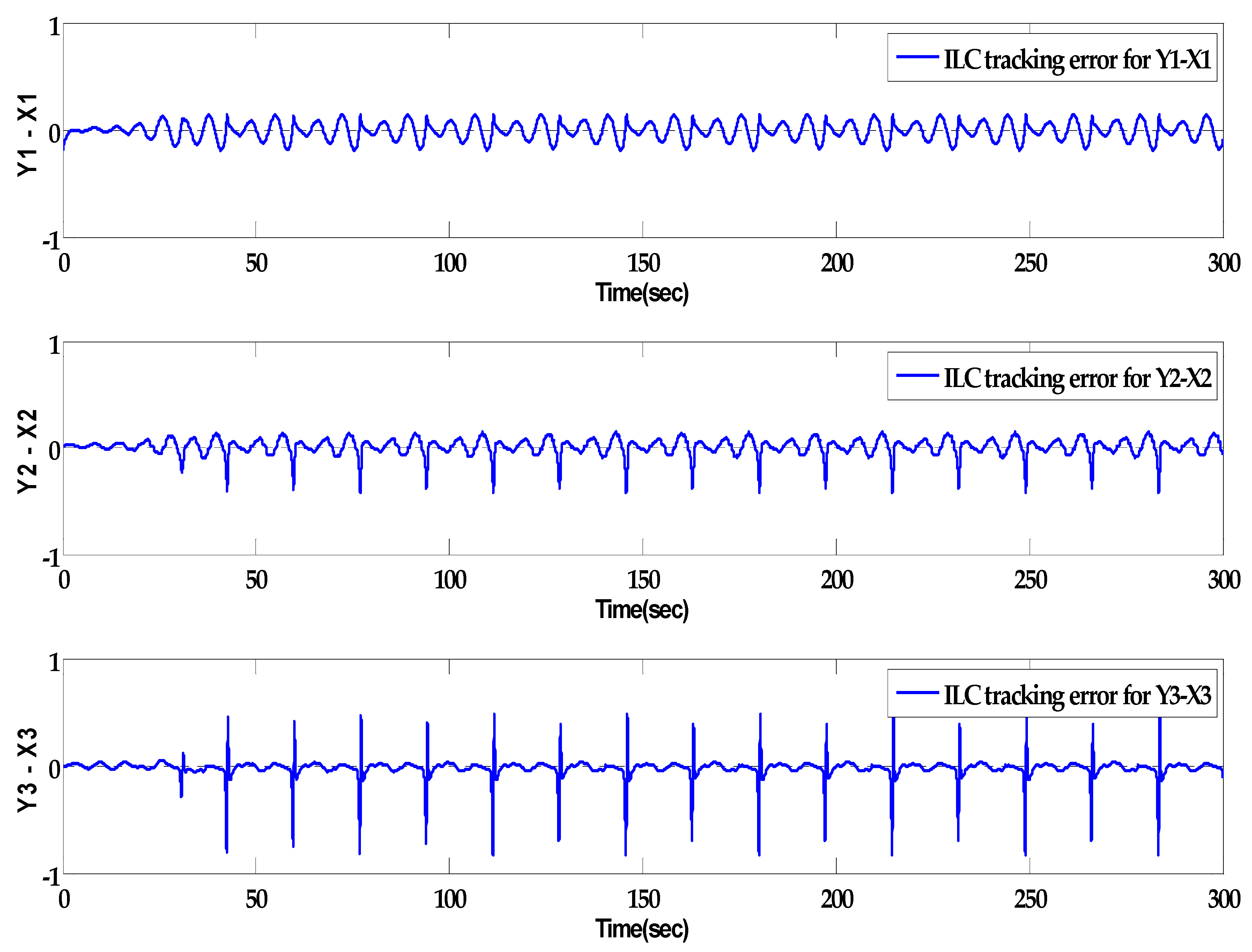
3.2. Exhibiting Simulation Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kautz, R.L.; Monaco, R. Survey of chaos in the rf-biased Josephson junction. J. Appl. Phys. 1985, 57, 875. [Google Scholar] [CrossRef]
- Whan, C.B.; Lobb, C.J. Complex dynamical behavior in RCL-shunted Josephson tunnel junctions. Phys. Rev. E 1996, 53, 405–413. [Google Scholar] [CrossRef]
- Dana, S.K.; Sengupta, D.C.; Edoh, K.D. Chaotic Dynamics in Josephson Junction. IEEE Trans. Circuits Syst. Fundam. Theor. Appl. 2001, 48, 1057–7122. [Google Scholar] [CrossRef]
- Hu, Y.T.; Zhou, T.G.; Gu, J.; Yan, S.L.; Fang, L.; Zhao, X.-J. Study on chaotic behaviors of RCLSJ model Josephson junctions. J. Phys. Conf. Ser. 2008, 96, 012035. [Google Scholar] [CrossRef] [Green Version]
- Yuan, S.L.; Jing, Z.J. Bifurcations of periodic solutions and chaos in Josephson system with Parametric Excitation. Acta. Math. Appl. Sin. Engl. Ser. 2015, 31, 335–368. [Google Scholar] [CrossRef]
- Huberman, B.A.; Crutchfield, J.P.; Packard, N.H. Noise phenomena in Josephson junctions. Appl. Phys. Lett. 1980, 37, 750–752. [Google Scholar] [CrossRef]
- Harb, A.M.; Harb, B.A. Controlling Chaos in Josephson-Junction Using Nonlinear Backstepping Controller. IEEE Trans. Appl. Supercond. 2006, 16, 1988–1998. [Google Scholar] [CrossRef]
- Ucar, A.; Lonngren, K.E.; Bai, E.W. Chaos synchronization in RCL-shunted Josephson junction via active control. Chaos Solitons Fractals 2007, 31, 105–111. [Google Scholar] [CrossRef]
- Feng, Y.L.; Shen, K.E. Chaos synchronization in RCL-shunted Josephson junctions via a common chaos driving. Eur. Phys. J. B 2008, 61, 105. [Google Scholar] [CrossRef]
- Vincenta, U.E.; Ucarb, A.; Laoyea, J.A.; Kareema, S.O. Control and synchronization of chaos in RCL-shunted Josephson junction using backstepping design. Physica C 2008, 468, 374–382. [Google Scholar] [CrossRef]
- Zribi, M.; Khachab, N.; Boufarsan, M. Synchronization of two RCL shunted Josephson Junctions. In Proceedings of the 2011 International Conference on Microelectronics (ICM), Hammamet, Tunisia, 19–22 December 2011. [Google Scholar] [CrossRef]
- Lu, C.; Liu, A.; Ling, M.; Dong, E. Synchronization of chaos in RCL-shunted Josephson junctions array. Chin. Autom. Congr. 2015, 1956–1961. [Google Scholar] [CrossRef]
- Njah, A.N.; Ojo, K.S.; Adebayo, G.A.; Obawole, A.O. Generalized control and synchronization of chaos in RCL-shunted Josephson junction using backstepping design. Physica C 2010, 470, 558–564. [Google Scholar] [CrossRef]
- Xu, S.Y.; Tang, Y.; Sun, H.D.; Zhou, Z.G.; Yang, Y. Characterizing the anticipating chaotic synchronization of RCL-shunted Josephson junctions. Int. J. Non-Linear Mech. 2012, 47, 1124–1131. [Google Scholar] [CrossRef]
- Chadli, M.; Zekinka, L.; Yousset, T. Unknown inputs observer design for fuzzy systems with application to chaotic system reconstruction. Comput. Math. Appl. 2013, 66, 147–154. [Google Scholar] [CrossRef]
- Chadli, M.; Zekinka, L. Chaos synchronization of unknown inputs Takagi-Sugeno fuzzy: Application to secure communications. Comput. Math. Appl. 2014, 68, 2142–2147. [Google Scholar] [CrossRef]
- Zekinka, L.; Chadli, M.; Davendra, D.; Senkerik, R.; Jasek, R. An investigation on evolutionary reconstruction of continuous chaotic systems. Math. Comput. Model. 2013, 57, 2–15. [Google Scholar] [CrossRef]
- Ho, M.C.; Hung, Y.C. Synchronization of two different systems by using generalized active control. Phys. Lett. A 2002, 301, 424–428. [Google Scholar] [CrossRef]
- Moore, K.L. Iterative Learning Control for Deterministic System; Springer: New York, NY, USA, 1992; pp. 63–78. [Google Scholar]
- Werndl, C. What Are the New Implications of Chaos for Unpredictability. Br. J. Philos. Sci. 2009, 60, 195–220. [Google Scholar] [CrossRef]
- Doebeli, M.; Ispolatov, I. Chaos and Unpredictability in Evolution. Evolution 2014, 68, 1365–1373. [Google Scholar] [CrossRef]
- Schuster, H.G. Handbook of Chaos Control; John Wiley & Sons: Hoboken, NJ, USA, 2006; pp. 303–324. ISBN 9783527607457. [Google Scholar]
- Li, Z.G.; Wen, C.Y.; Soh, Y.C. Analysis and Design of Impulsive Control System. IEEE Trans. Autom. Control 2001, 46, 894–897. [Google Scholar] [CrossRef]
- Zhang, W.X.; Giu, Z.J.; Wang, K.H. Impulsive Control for Synchronization of Lorenz Chaotic System. J. Softw. Eng. Appl. 2012, 5, 23–25. [Google Scholar] [CrossRef]
- Boccaletti, S.; Kurths, J.; Osipov, G.; Valladares, D.l.; Zhou, C.S. The synchronization of chaotic system. Phys. Rep. 2002, 366, 1–101. [Google Scholar] [CrossRef]
- Cheng, C.K.; Kuo, H.H.; Hou, Y.Y.; Chuan, C.C.; Liao, T.L. Robust chaos Synchronizing of noise-perturbed chaotic systems with multiple time-delay. Phys. A 2002, 387, 3093–3102. [Google Scholar] [CrossRef]
- Cheng, C.K.; Chao, P.C.-P. Chaotic Synchronizing Systems with Zero Time Delay and Free Couple via Iterative Learning Control. Appl. Sci. 2018, 8, 177. [Google Scholar] [CrossRef]
- Sarasolaa, C.; Torrealdeab, F.J.; d’Anjoub, A.; Grañab, M. Cost of synchronizing different chaotic systems. Math. Comput. Simul. 2002, 58, 309–327. [Google Scholar] [CrossRef]
- Sorrentino, F. Adaptive coupling for achieving stable synchronization of chaos. Phys. Rev. E 2009, 80, 056206. [Google Scholar] [CrossRef] [PubMed]
- Jafari, S.; Sprott, U.C.; Pham, V.-T. A New Cost Function for Parameter Estimation of Chaotic Systems Using Return Maps as Fingerprints, International. Int. J. Bifurc. Chaos 2014, 24, 1450134. [Google Scholar] [CrossRef]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, C.-K.; Chao, P.C.-P. Trajectory Tracking between Josephson Junction and Classical Chaotic System via Iterative Learning Control. Appl. Sci. 2018, 8, 1285. https://doi.org/10.3390/app8081285
Cheng C-K, Chao PC-P. Trajectory Tracking between Josephson Junction and Classical Chaotic System via Iterative Learning Control. Applied Sciences. 2018; 8(8):1285. https://doi.org/10.3390/app8081285
Chicago/Turabian StyleCheng, Chun-Kai, and Paul Chang-Po Chao. 2018. "Trajectory Tracking between Josephson Junction and Classical Chaotic System via Iterative Learning Control" Applied Sciences 8, no. 8: 1285. https://doi.org/10.3390/app8081285
APA StyleCheng, C.-K., & Chao, P. C.-P. (2018). Trajectory Tracking between Josephson Junction and Classical Chaotic System via Iterative Learning Control. Applied Sciences, 8(8), 1285. https://doi.org/10.3390/app8081285