1. Introduction
The GPS, as one of Global Navigation Satellite Systems (GNSSs), was first applied for time transfer by Allan and Weiss [
1] in the 1980s. Afterwards, a technique called Common-View (CV) was employed for International Atomic Time (TAI) comparison. This method provided an opportunity for high-precision (several nanoseconds) time transfer with a low-cost receiver [
1]. Furthermore, with development of the precise products released by the International GNSS Service (IGS) [
2,
3], precise point positioning (PPP) approach, using phase and code observations, was applied for time and frequency transfer in the time community [
4,
5,
6]. PPP has been utilized to compute time links for TAI since September 2009 and is currently used by upon 50% of more than 70 laboratories in the word contributing to TAI and Universal Time Coordinated (UTC) computation [
7,
8]. Compared with GNSS code-only techniques, such as CV and All-in-View (AV) [
9], better short-term stability in time transfer can be achieve with PPP. The present typical uncertainty of PPP-based frequency comparison is about 1 × 10
−15 at 1-day average and about 1 × 10
−16 at 30-day average, where corresponding to type A uncertainty of 0.3 ns for time-links in the Bureau International des Poids et Mesures (BIPM) Circular T. Moreover, the integer-PPP (IPPP) technique implemented by CNES (Centre National d’Etudes Spatiales) was first applied to perform frequency transfer [
10]. The results demonstrated that the IPPP technique allowed frequency comparison with 1 × 10
−16 accuracy in several days and could be readily operated with existing products.
With multi-GNSS development, multi-GNSS techniques are widely utilized in timing community. The second GNSS, Russia’s GLONASS, has been reinvigorated since October 2011 and is now fully operational with 24 satellites. Furthermore, the number of IGS stations, which can track GLONASS satellites, is increasing [
11]. Hence, researchers have begun to investigate the performances of GLONASS positioning [
12,
13], ionospheric studies [
14,
15], tropospheric studies [
16] and time transfer [
17]. Unlike GPS, the GLONASS carrier phase and pseudorange observations suffer from different frequencies and inter-frequency biases due to the signal structure of GLONASS, which is based on the frequency division multipath access technique [
18]. Many studies have investigated the feature of inter-frequency phase biases (IFPBs) and indicated that a liner function of the frequency number can be employed to model the IFPBs [
19,
20]. Moreover, several studies investigated the characteristics of inter-frequency code biases (IFCBs) and demonstrated that IFCBs were dependent on receiver types, antenna types, domes and firmware versions [
21,
22]. GLONASS pseudorange observations usually set a very small weight to reduce the effect of IFCBs [
12]. However, this assignment will significantly reduce the contribution of pseudorange observations on PPP solutions, especially in the initialization phase. Hence, proper modeling of IFCBs is essential and critical for GLONASS-only PPP-based international time transfer.
To fully understand GLONASS IFCBs, Shi et al. [
21] estimated the IFCBs using GPS/GLONASS observations about 133 stations. Their study demonstrated that the IFCBs of some receivers showed a linear function of frequency numbers, while other showed a quadratic polynomial function. Chen et al. [
23] employed different IFCB handling schemes in GPS/GLONASS satellite clock estimation, giving the conclusion that considering GLONASS IFCBs can achieve better positioning performance of GPS/GLONASS PPP. Furthermore, Zhou et al. [
13] investigated the influence of GLONASS IFCBs on convergence time and positioning performance of GLONASS-only and GPS/GLONASS PPP, suggesting that the convergence of PPP will be reduced using GLONASS observations by more than 20% when considering IFCBs.
To date, only a few studies have focused on combined GPS/GLONASS time transfer [
17,
24]. For example, Defraigne and Baire [
25] displayed a simple GPS/GLONASS PPP time transfer. Their study showed that adding GLONASS observations could modify the shape of the curve and improve the short-term stability slightly. Up to now, limited studies focus on international time transfer on the basis of GLONASS-only PPP with considering IFCBs. This contribution seeks to gain insight into the influence of GLONASS IFCBs on international time transfer based on GLONASS-only PPP. PPP strongly depends on the externally final orbit and clock products.
Table 1 summarizes the IFCB handling schemes adopted by different IGS analysis centers (ACs) in GLONASS satellite clock estimation. In this contribution, three GLONASS IFCB handling schemes, which are neglect IFCBs, estimate IFCB for each GLONASS frequency number, and estimate IFCB for each GLONASS satellite, are employed into our ionospheric-free PPP model. The remaining paper is conducted as follows. It starts with a representation of GLONASS ionospheric-free PPP model considering IFCBs in detail. The data selection and processing strategies are then introduced. Afterwards, in accordance with the uncertainty indicator, the performance of PPP-base time transfer by using different receiver and antennas, different processing modes (with/without fixing coordinates), and different precise products is evaluated. Finally, it ends with summary and conclusions.
4. Result and Discussion
For convenience, the three processing schemes are marked as IFCB0, IFCB1 and IFCB2, respectively, in
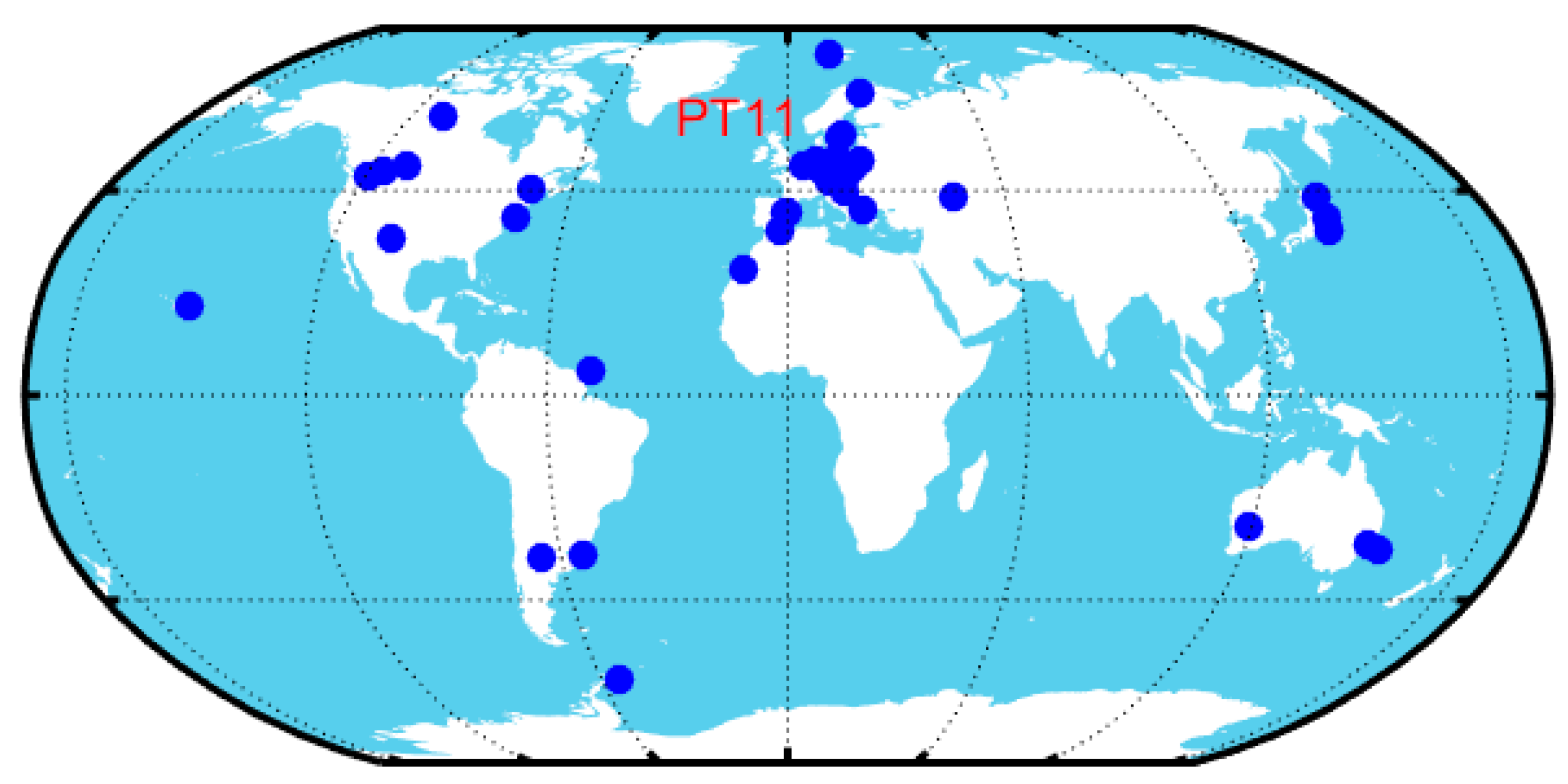
Table 5. The 70-day observations for all station are divided equally into seven sessions and 70 sessions to assess PPP-based time transfer performance. In total, there are approximately 266 and 2730 time transfer tests used in the experiment. The GLONASS PPP-based performance in terms of time transfer uncertainty is evaluated at the 68% and 95% confidence levels in the static mode. This statistic approach has been adopted by Lou et al. [
34] and Zhou et al. [
13] for assessing PPP performance. The process of the application of the experiments is divided into four part. (1) Evaluating IFCBs with GLONASS-only PPP; (2) GLONASS PPP time transfer with identical receivers or mixed receivers are analyzed; (3) The performance of GLONASS PPP for different end users are presented; (4) The performances of the GLONASS PPPs with different IGS ACs products are investigated for different IFCB handling schemes.
4.1. Evaluation of IFCBs with GLONASS-Only PPP
Figure 2 illustrates the IFCB variability during DOY 227–297, 2017 for satellite R02 at five representative stations (DRAO, ROAP, MIZU, BOR1 and BRUX). Both IFCBs range from −20 to 22 ns, depending on different signal frequencies and stations. It indicates that IFCBs of the two strategies are similar in tendency, while different in values.
We analyzed the behaviors of the IFCBs in two steps. We differenced IFCB1 and IFCB2 firstly. The mean absolute value of IFCB1-IFCB2 over all satellites in DOY 227–297 is then computed for each station, as shown in
Figure 3. We can see that the quality of the IFCBs for two strategies are not equal. The bias is approximately 0.5 ns. From the analysis, it is essential to estimate the IFCBs using GLONASS PPP for international time transfer. The impact of IFCBs on GLONASS PPP international time transfer with different strategies is numerically analyzed in the next section.
4.2. GLONASS PPP with Identical Receivers or Mixed Receivers
In this subsection, the impact of IFCBs on GLONASS PPP with identical receivers (identical receivers and antenna) and mixed receivers (identical receivers but different antenna) are demonstrated.
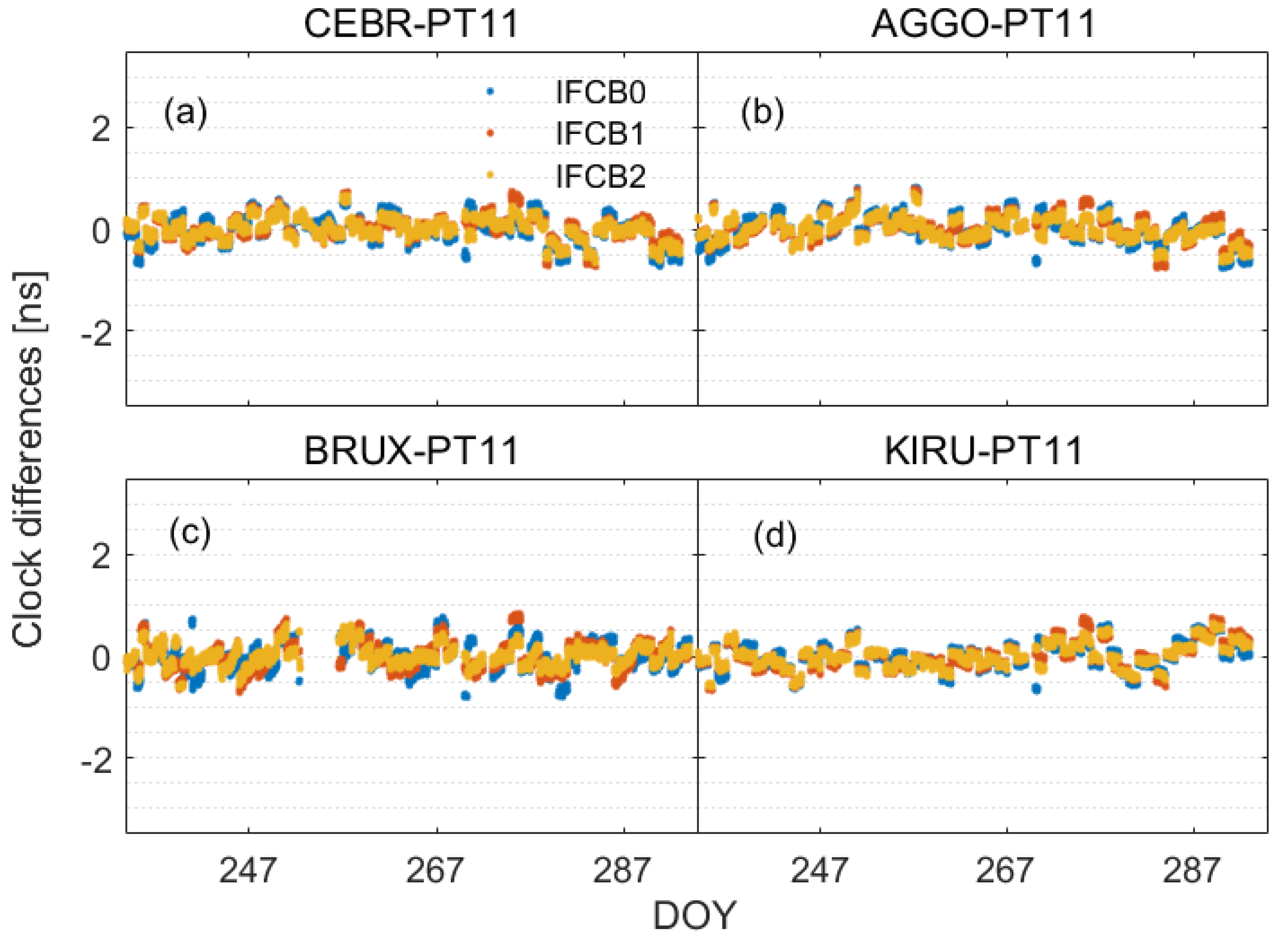
Figure 4 depicts the clock difference series of the stations equipped with the identical receivers (CEBR-PT11 and AGGO-PT11) or mixed receivers (BRUX-PT11 and KIRU-PT11). For convenience, the clock difference series has deducted the mean values. We can see that
Figure 4 illustrates the good performance of time transfer when considering IFCB parameters, especially for IFCB2 schemes. We further support this finding by showing more results.
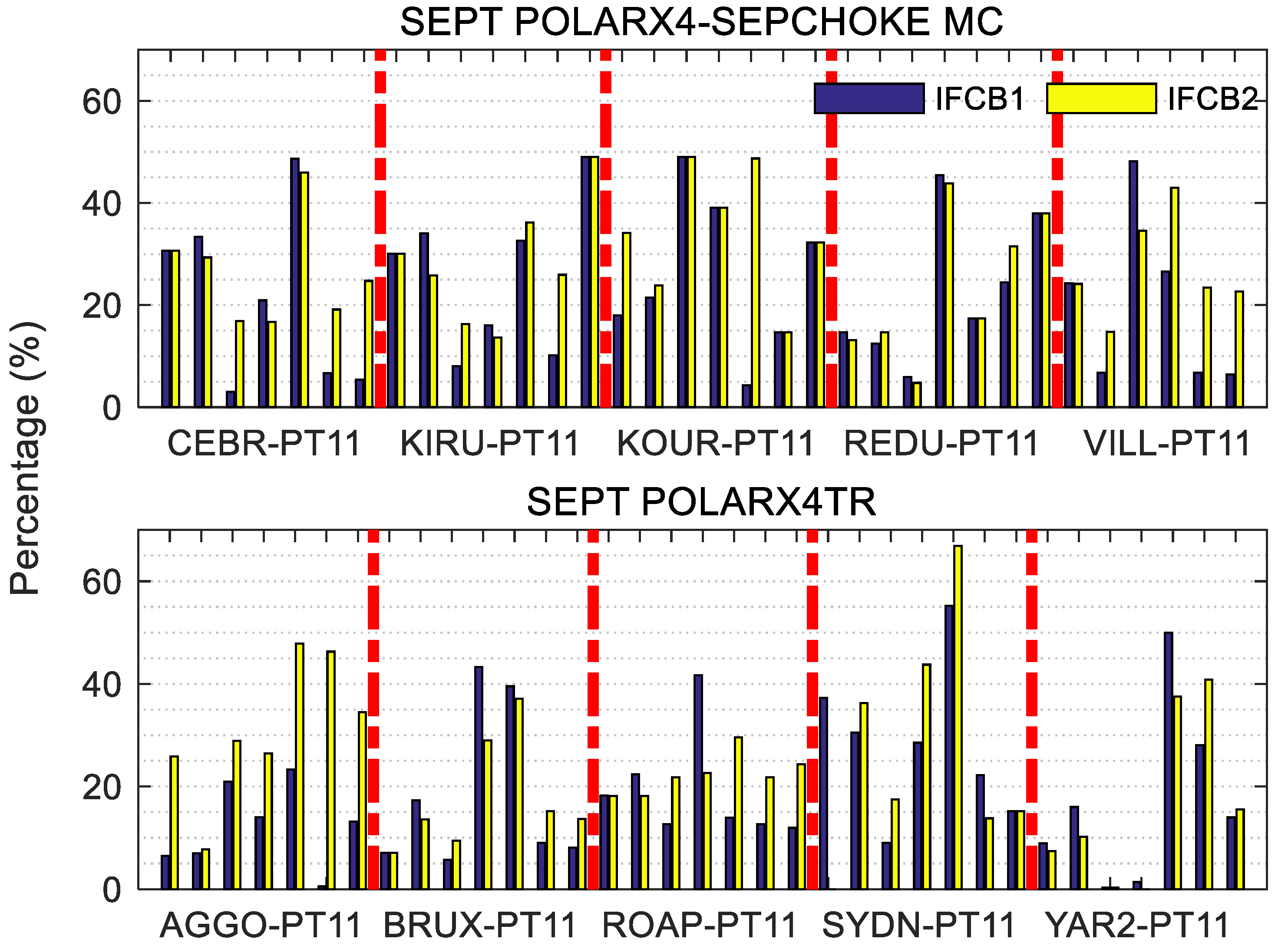
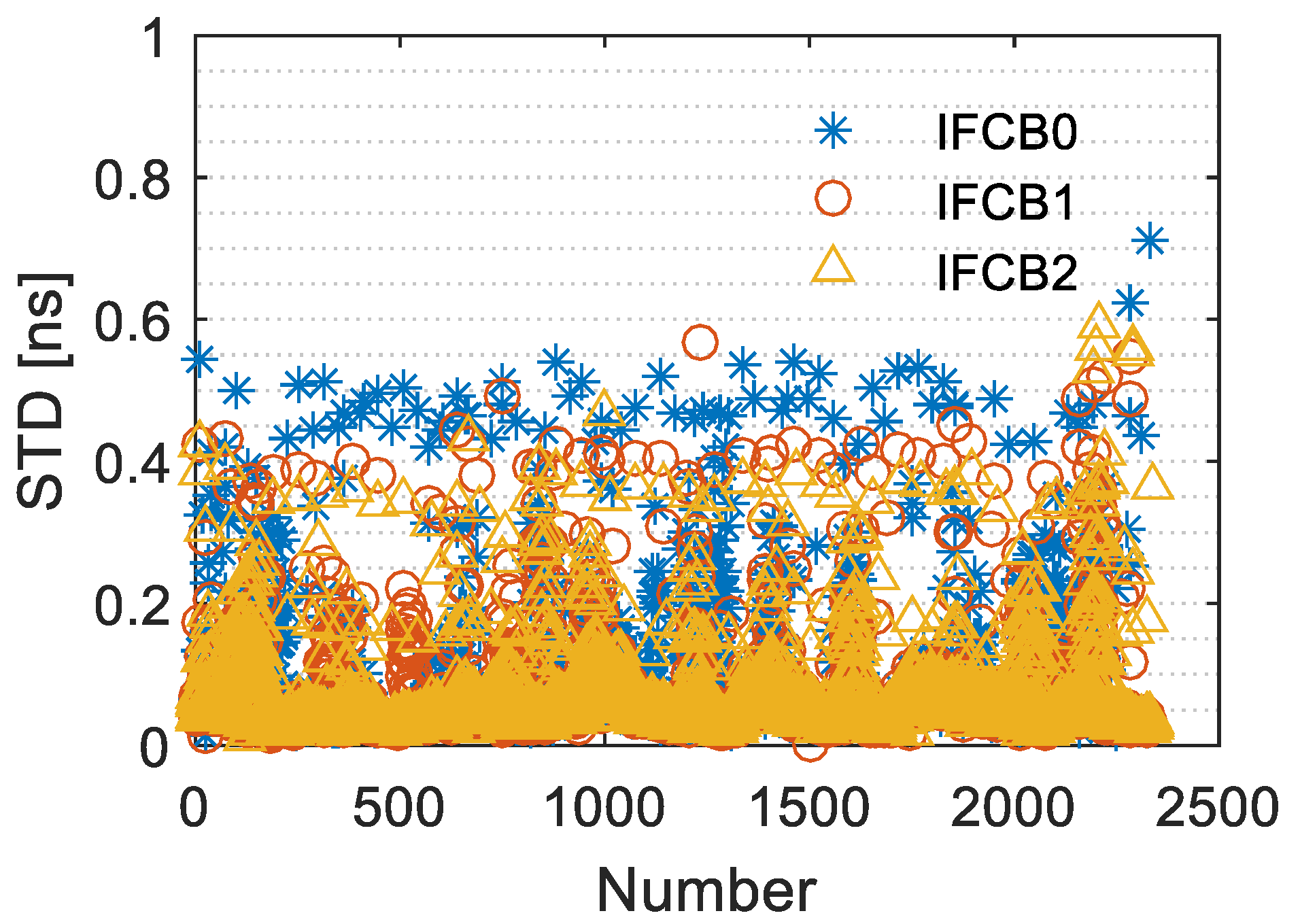
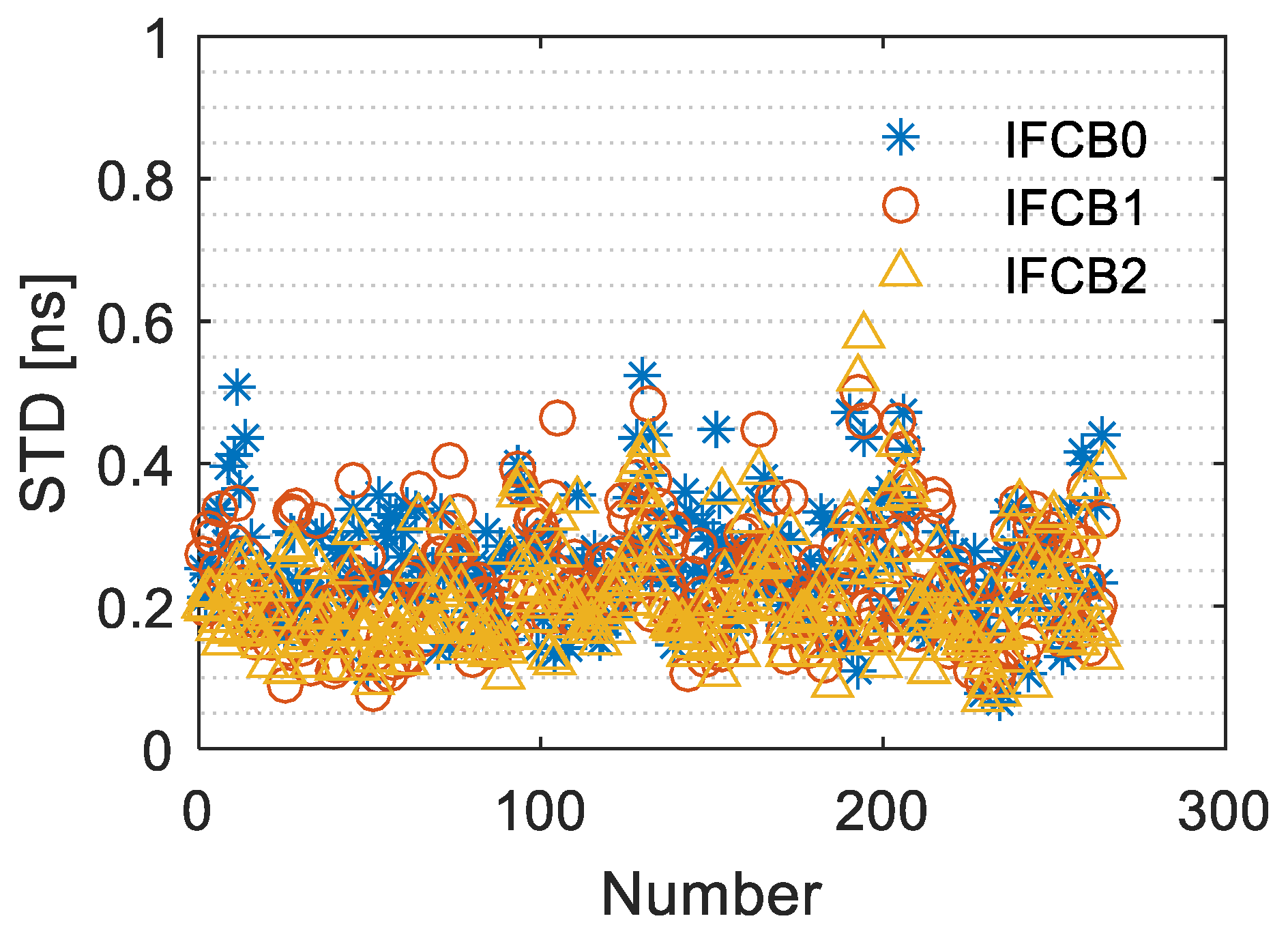
Figure 5 shows the STD of the clock differences from the selected stations equipped with identical receivers (top) (CEBR-PT11, KIRU-PT11, KOUR-PT11, REDU-PT11 and VILL-PT11) and mixed receivers (bottom) (AGGO-PT11, BRUX-PT11, ROAP-PT11, SYDN-PT11 and YAR2-PT11), for the IFCB0, IFCB1 and IFCB2 solutions, respectively. Meanwhile, the uncertainty (STD) improvement of the IFCB1 and IFCB2 solutions are described in
Figure 6. It is noted that the centre node, PT11, is equipped with SEPT POLARX4TR receiver and LEIAR25.R4 LEIT antenna. Taken together, we make three remarks. First, we can see that the STDs of the clock differences reach about 0.2 ns for the stations equipped with identical receivers or mixed receivers. Second, considering IFCB parameters, it is of interest to find an obvious improvement in the uncertainty (STD) of the GLONASS PPP-based time transfer. Compared with IF0, the percentage of improvement ranged from 3.0% to 49.0% for IFCB2. In addition, a similar characteristic is derived after considering the IFCBs for different stations equipped with identical receivers. Moreover, even though both ends of the time-links equipped with identical receivers (see in
Figure 5 (top)), GLONASS PPP can reach better performance when considering the IFCBs. Third, similar to the solutions of stations equipped with the identical receivers, IFCB0 performs worst in the time transfer performance, while IFCB2 performs best. The uncertainty improvement is in the range of 0.96% to 59.4% and of 3.3% to 62.6% for the IFCB1 and IFCB2 solutions of the selected stations equipped with mixed receivers, respectively.
4.3. GLONASS PPP for Different End Users
In this part, the solutions of GLONASS PPP, neglecting the type of receiver and antenna, are presented by using CODE products. Furthermore, the coordinates of receiver of time-keeping laboratories are known values, while the coordinates of time users are unknown. Hence, the influence of IFCBs on GLONASS PPP-based time transfer for different end users (with/without fixing coordinates) are compared.
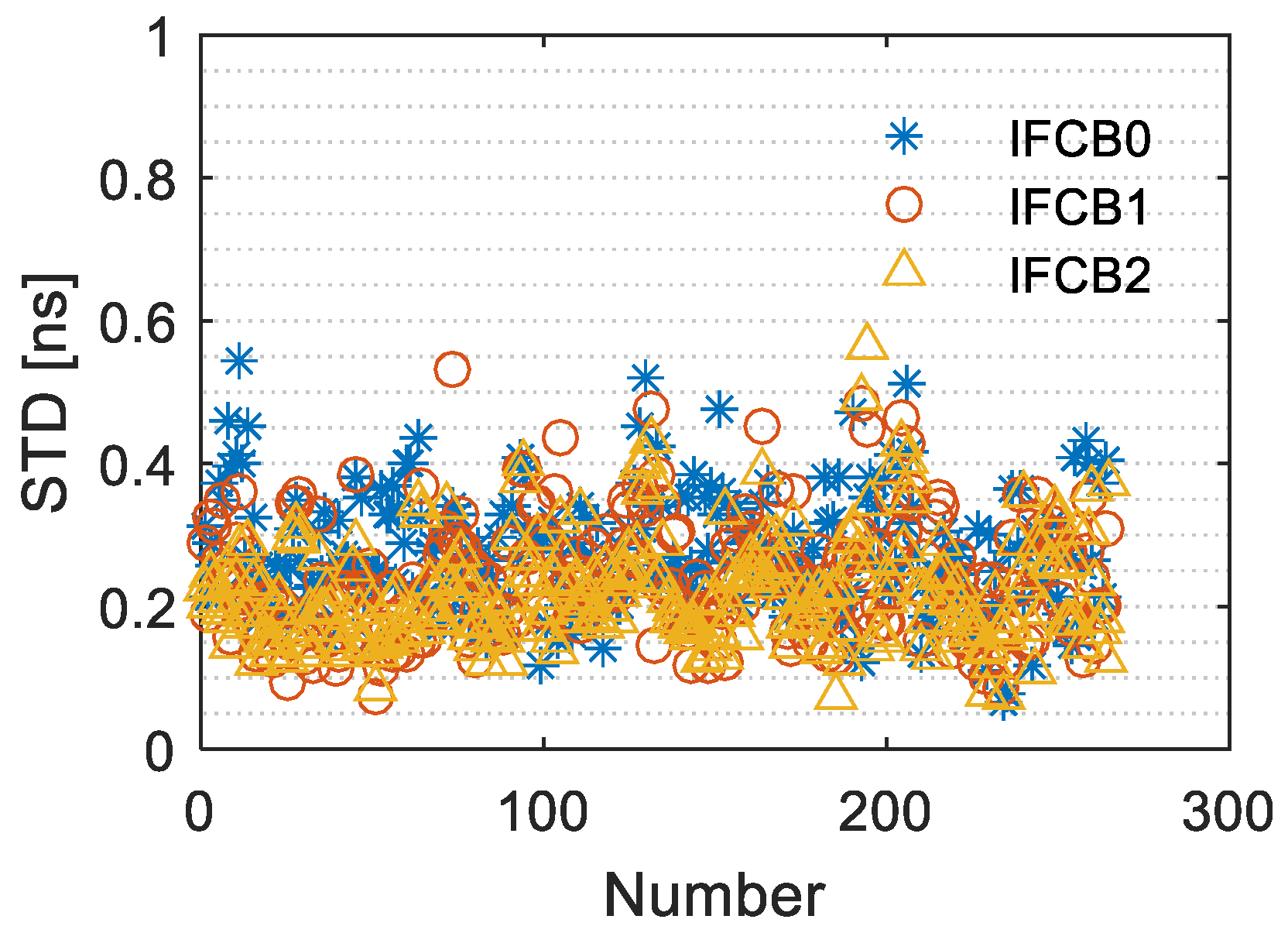
Figure 7 and
Figure 8 display the STD series of one-day arc solutions and ten-day arc solutions, respectively, in different schemes with coordinate-fixed over all the tests. We can see that the STDs of the one-day arc solutions are mainly less than 0.2 ns, while a part of the solutions is poor. This result is, unexpectedly, the facts listed as follows.
Figure 9 depicts the clock differences of AGGO-PT11 and BRUX-PT11 at DOY 235, 2017. Obviously, a clock discontinuity may be present at DOY 235 on two time-links. We address this issue by considering a representative example (depicted in
Figure 10), which lost part of the observations depicted in the red box. The ambiguities will be re-estimated in the second arc. Hence, the solutions of GLONASS PPP present a clock discontinuity, while the GPS PPP shows a good performance due to the greater visibility of satellites. One the other hand, the STD of the 10-day solutions ranged from 0.1–0.4 ns. We further find that some results are greater than 0.4 ns, such as the TSK2-PT11 and STK2-PT11 time-links. We surmise that this may be related to the Geometric Dilution of Precision (GDOP). Zhou et al. [
13] displayed the average global GDOP of GLONASS with an elevation cut-off angle of 7°. The results demonstrated that the GLONASS GDOP is analogous in the middle- and high-latitude regions than that in the low-latitude regions. Combined with
Figure 7 and
Figure 8, we can conclude that the day-boundary discontinuities are still a problem for GLONASS PPP-based time transfer. Meanwhile, the STDs of the clock difference were determined with one-day arc solutions and ten-day arc solutions in
Table 6. We can observe that the 0.075 and 0.280 ns were obtained for the IFCB0 solutions at the 68% level in one-day arc solutions and ten-day arc solutions, respectively, while 0.300 and 0.403 ns at the 95% level, respectively. Interestingly, it is found that the STDs of the clock difference between the 68% and 95% levels for one-day solutions are slightly different. The difference can be attributed to the fact that the clock jumps due to the observation interruption. After considering IFCBs in GLONASS-only PPP, time transfer performance is improved compared to that of IFCB0. We further support this finding as shown in
Table 6, which demonstrates that IFCB1 performs better than IFCB0, while IFCB3 performs best among the processing schemes. Taken together, uncertainty (STD) of IFCB2 is significantly improved by 30.0% from 0.300 to 0.211 ns and by 10.9% from 0.403 to 0.359 ns for the one-day arc solutions and ten-day solutions, respectively, at the 95% level. At the 68% level, the STD of the clock difference is significantly reduced, by 17.3% from 0.075 to 0.062 ns and by 20.0% from 0.28 to 0.224 ns for the one-day arc solutions and 10-day solutions, respectively. Moreover, we further find that the improvement in STD at the 95% level is more obvious than that at the 68% level for one-day arc solutions. As stated before, one can conclude that a good performance for GLONASS PPP can be achieved under the observation interruption when considering the IFCBs.
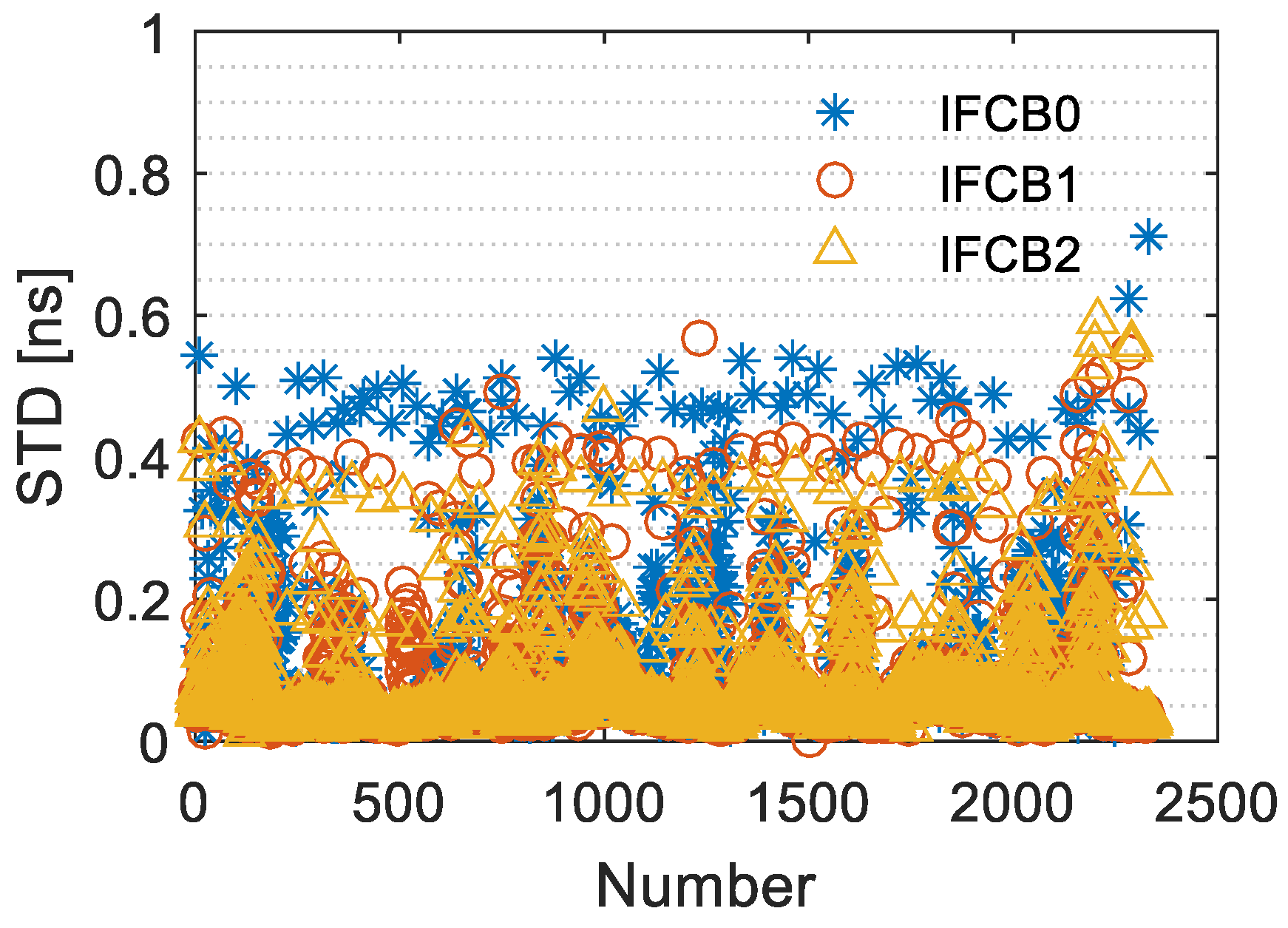
Usually, the coordinates of the receivers located in the time keeping laboratory are known values. Unlike the time keeping laboratory, they may be regarded as estimation parameters for the time users. To assess the influence of the IFCBs on the GLONASS PPP without coordinate-fixed, the STDs of the series of the one-day and ten-day arc solutions in different schemes are depicted in
Figure 11 and
Figure 12, respectively, without coordinate-fixed.
Table 7 presents the STDs of the GLONASS PPP at the 95 and 68% levels for the one-day and ten-day arc solutions, respectively. Similar to the GLONASS PPP with coordinate-fixed, the IFCB2 performs best. Compared with IFCB0, the STD of IFCB2 is reduced by 30.59% going from 0.304 to 0.211 ns, and by 10.46% going from 0.411 to 0.368 ns in one-day arc solutions and ten-day arc solutions at the 95% level, respectively. Besides, the different users (with and without coordinates fixed) are to be the same level. It is of great interest found that the improvement of the IFCBs is not obvious in the one-day arc solutions at the 68% level. We take this fact as an indication that the STDs of one-day arc solutions mainly depend on the accuracy of carrier phase observations. We further found that the STD of 10-day arc solutions is more notably improved at the 68% level than at the 95% level. This is not unexpected given that few bad results are obtained when considering IFCBs, and we do not attempt to cover all of them; rather, without a loss of generality and for the sake of clarity, the bad results have been depicted in
Figure 8 and
Figure 12. In the 266 tests of 10-arc solutions, there are 34 and 10 bad results for IFCB1 and IFCB2, respectively. These results further demonstrate that IFCB2 performs best.
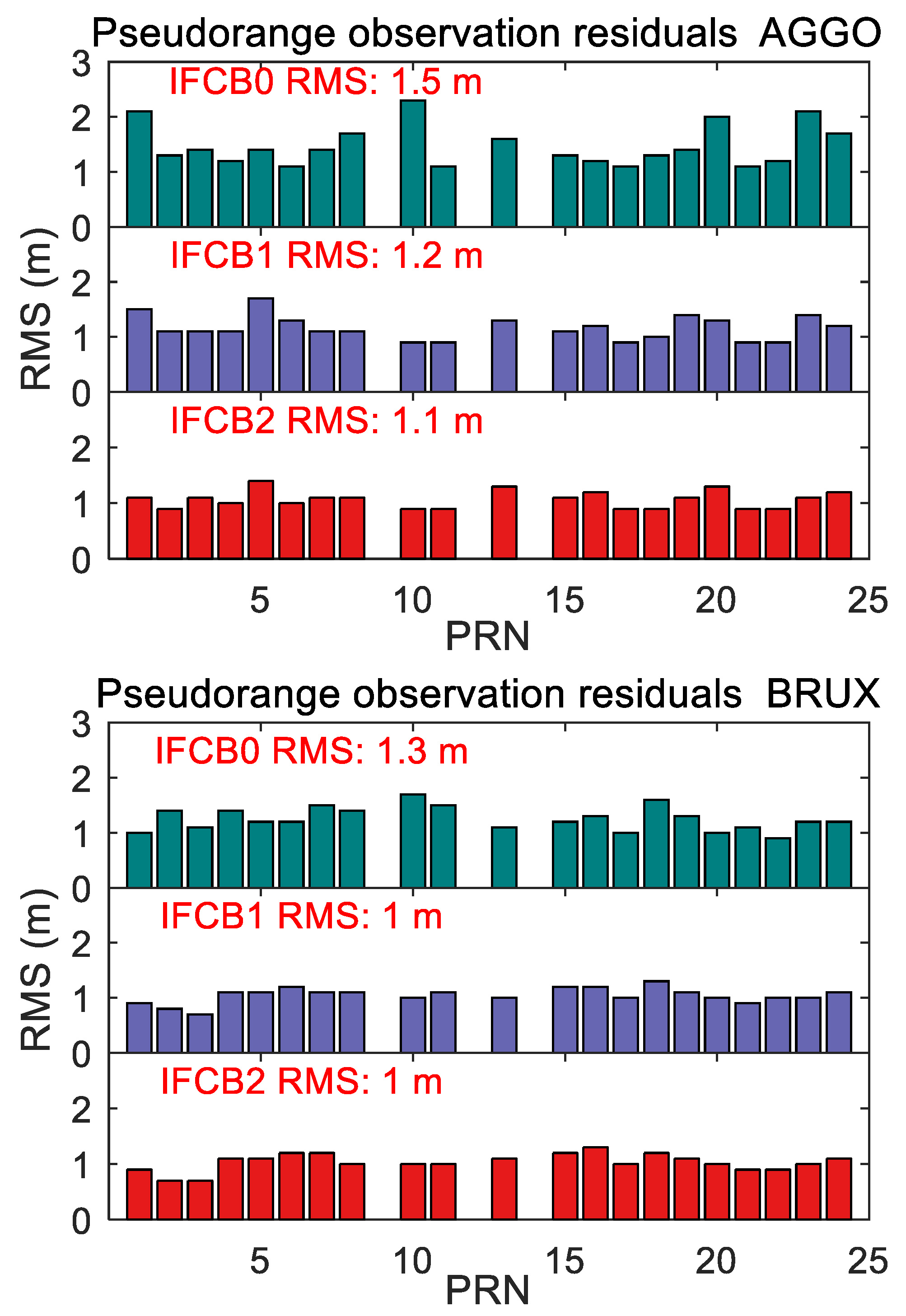
Since observation residuals contain measurement noise and other unmodeled errors, they can be used as important indicators to evaluate the PPP model. The pseudorange observation residuals at the two selected IGS stations (AGGO and BRUX) for the GLONASS PPP processing on DOY 227, 2017, are depicted in
Figure 13. In the figure, the RMS statistics of each satellite in the different schemes are displayed in each panel. Neglecting GLONASS IFCB, larger RMS values can be observed, compared to the pseudorange residuals of IFCB1 and IFCB2. Overall, the statistical results clearly demonstrate that IFCB2 has the smallest proper handled in the IFCB2 model.
4.4. GLONASS PPP with Different IGS ACs Products
In this subsection, the performances of the GLONASS PPPs with different IGS ACs products are investigated for different IFCB handling schemes. Note that the GLONASS PPP solutions without coordinate-fixed are indicated herein.
Figure 14 shows the clock difference series of the two selected time-links using ESA and GFZ products in different schemes, respectively. The STD of the clock difference using the ESA and GFZ products at the 95 and 68% levels in the one-day arc solutions and ten-day arc solutions, respectively, are presented in
Table 8 and
Table 9. Taking
Table 7,
Table 8 and
Table 9 together, it can be seen that the STD of the clock difference can be significantly reduced, especially for the ten-day arc solutions, when considering the GLONASS IFCBs. Interestingly, IFCB0 performs worst at the 95% and 68% levels, while IFCB2 performs best, even though different IFCBs processing strategies were adopted for different IGS ACs. This may be caused by the fact that when considering IFCBs at IGS ACs for each clock product that does not contain IFCBs, while IFCBs still exist in the pseudorange observations. This result means that IFCB estimation is necessary for the end user. Furthermore, estimating the IFCBs for each GLONASS satellite is the best choice. After applying the GFZ products, compared with IFCB0, the STD of IFCB2 is reduced by 23.47% from 0.294 to 0.203 ns, and by 14.88% from 0.430 to 0.366 ns, in the one-day arc solutions and ten-day arc solutions at the 95% level, respectively. At the 68% level, STD of IFCB2 is significantly reduced by 30.77% from 0.078 to 0.054 ns, and by 22.26% from 0.274 to 0.213 ns, for the one-day arc solutions and ten-day arc solutions, respectively.
The STD of the clock difference using the ESA products at the 95 and 68% levels in the one-day arc solutions and ten-day arc solutions, respectively, are depicted in
Table 8. Taking
Table 6,
Table 8 and
Table 9, it is of interest to note that different STD values of the clock difference are presented using different products. This difference can be attributed to the different accuracy of the precise orbits and clock for the IGS ACs. Similar to GLONASS PPP using the GFZ products, the IFCB2 schemes shows the best performance. Compared with IFCB0, the STD of IFCB2 is reduced by 38.78% from 0.343 to 0.210 ns, and by 32.95% from 0.516 to 0.346 ns in the one-day arc solutions and 10-day arc solutions at the 95% level, respectively. At the 68% level, STD of IFCB2 is obviously reduced by 11.29%, from 0.062 to 0.055 ns, and by 41.76%, from 0.376 to 0.219 ns for the one-day arc solutions and 10-day arc solutions, respectively.
5. Conclusions
In our work, GLONASS inter-frequency code biases (IFCBs) for GLONASS PPP-based international time transfer is modeled through a reparameterization process. Three different GLONASS IFCB handling schemes, which neglect IFCBs (IFCB0), estimate IFCBs for each GLONASS frequency number (IFCB1), and estimate each GLONASS satellite (IFCB2), were proposed for ionosphere-free GLONASS-only PPP. Seventy days of observation data from DOY 227–297 in 2017 from 36 stations of IGS network and three stations of time a keeping laboratory were selected to assess the model, and preliminary international time transfer results have been concluded. For the comparison, the GPS-only PPP solutions using IGS final products are regarded as reference. Clock differences between GPS- and GLONASS-only PPP solutions are then analyzed.
The quality of the IFCBs estimated for IFCB1 and IFCB2 are not equal. The bias is approximately 0.5 ns. The numerical results showed that for GLONASS PPP, considering the IFCBs can significantly reduce the STD of the clock difference for identical receivers (the reductions from 3.0% to 49%) or mixed receivers (the reductions from 3.3% to 62.6%). IFCB0 performs worst in the time transfer performance, while IFCB2 performs best for identical receivers or mixed receivers. Furthermore, the uncertainty (STD) of different end users, which include the exact coordinate of the station as known and unknown values, for example, time keeping laboratories and time users, shown a similar characteristic. Compared with neglecting IFCBs, the STDs of end users with coordinate-fixed were reduced by more than 30% from 0.3 to 0.2 ns, and 10% from 0.40 to 0.35 ns, at the one-day arc solutions and ten-days arc solutions, respectively, when estimating the IFCBs for each GLONASS satellite. The STDs of end users without coordinate-fixed improved by 30.59% going from 0.304 to 0.211 ns, and by 10.46% going from 0.411 to 0.368 ns in one-day arc solutions and ten-day arc solutions at the 95% level, respectively. Moreover, different precise products from the three IGS ACs were adopted for analysis. Even though different IFCBs handling strategies were adopted during their GLONASS satellite clock estimation, our numerical analysis showed that GLONASS-only PPP-based international time transfer achieved better performance when estimating IFCBs for each GLONASS satellite among using the three GLONASS final products.
Generally, estimating the IFCBs for each GLONASS satellite is superior for GLONASS PPP time transfer uncertainty improvement. The results suggest that, GLONASS IFCBs may not be strict for each satellite frequency. Therefore, it is recommended that this scheme can be utilized to handle GLONASS IFCBs in the PPP international time transfer processing for GLONASS observations.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}