1. Introduction
The adaptive cruise control (ACC) system is the commercial implementation of the advanced driver assistance system (ADAS) that can reduce drivers’ workload (e.g., taking over the longitudinal control task), and improve vehicle safety as well as traffic flow [
1,
2]. The designs of current commercial ACC systems mainly focus on tracking a desired speed or maintaining a desired safe distance from preceding vehicles in the same lane. Additionally, various studies have recently begun to explore additional objectives such as fuel economy, longitudinal ride comfort, lateral stability, and vehicular physical limitations [
2,
3,
4,
5,
6]. As these mentioned objectives usually conflict with each other [
5], coordinating them simultaneously still presents a lot of challenges for designers, especially under complicated and volatile traffic scenarios.
Ioannou et al. [
7] pointed out that fuel consumption was much higher under conditions of large acceleration/deceleration, lane changing, as well as cut-in/cut-off. On this basis, Jonsson et al. [
8] suggested reducing fuel consumption while decreasing tracking capability. With respect to the longitudinal ride comfort, the vehicle longitudinal acceleration and its derivative (jerk) are typically restrained [
9]. To improve lateral stability, researchers typically employ a direct yaw-moment control (DYC) system [
10,
11]. Importantly, an emergency braking, road surface disturbance or a sudden strong side wind might result in vehicle deflection during the longitudinal car-following [
11], and furthermore ACC and DYC are reversely interactive with each other under some traffic scenarios [
12]. Zhang et al. [
12] therefore present a curving ACC system that is coordinated with a DYC system and gives consideration to both the longitudinal car-following performance and lateral stability on curved roads. The developed control system provides significant benefits in weakening the impact of DYC on the longitudinal car-following performance while also improving the lateral stability. What is more, in order to achieve the multiple objectives mentioned above, it is natural to introduce a model predictive control (MPC) framework, whose advantages in ACC controllers have recently been proven [
2,
5,
6].
However, the traditional model predictive control algorithm with a constant weight matrix will probably not be able to improve the overall performance in transient scenarios [
13]. Zhao et al. [
13] pointed out that the traditional model predictive control algorithm with a constant weight matrix cannot meet the improvement requirement in fuel economy and ride comfort, and accordingly proposed a real-time weight tuning strategy to solve time-varying multi-objective control problems, where the weight matrix can be adjusted with respect to different operating conditions. In addition, when the weight coefficient for each sub-objective is constant, it is easy to cause the distribution of solutions to be more concentrated, and accordingly it will be difficult to achieve the global optimum [
14]. For instance, when the current traffic scenario is emergent and severe, the longitudinal tracking capability should be most important to avoid a rear-end collision, which indicates that the importance (namely weight coefficient) of such a sub-objective in the MPC cost function should be paid more attention to. Similarly, when the tire-road friction coefficient is small, or the road curvature is large, priority should be given to the lateral stability for driving safety consideration.
As the lateral stability of an automotive vehicle in a steering maneuver is critical to the overall safety [
11], an integrated adaptive cruise control (IACC) model which takes the longitudinal inter-vehicle and lateral dynamics into consideration as a whole is suggested so as to achieve a maximization of the longitudinal car-following performance while guaranteeing the lateral stability. Furthermore, to solve the time-varying multi-objective coordinated optimization issues explained above, a weight coefficient self-tuning strategy is thus proposed, where the weight coefficient for each sub-objective can be adjusted automatically with the change of traffic scenarios.
The rest of this paper is organized as follows.
Section 2 presents the modeling of an integrated car-following system.
Section 3 quantifies performance indexes for IACC.
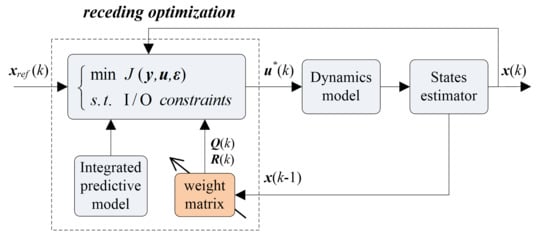
Section 4 suggests the dynamic weight coefficient adjustment strategy as well as receding optimization control algorithm based on MPC. Simulations and analysis are discussed in
Section 5. Lastly, conclusions are drawn in
Section 6.
2. Modeling of Integrated Car-Following System
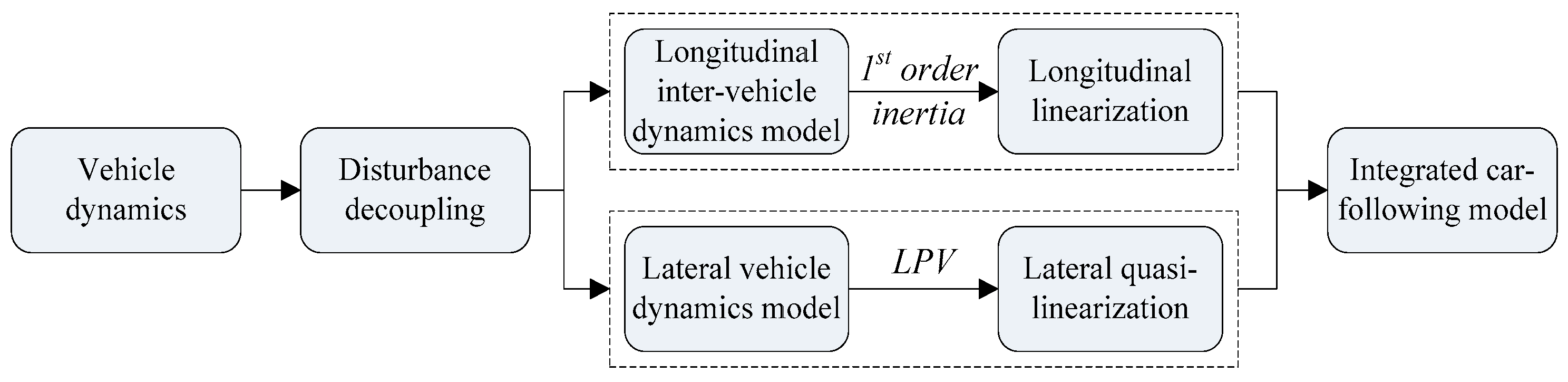
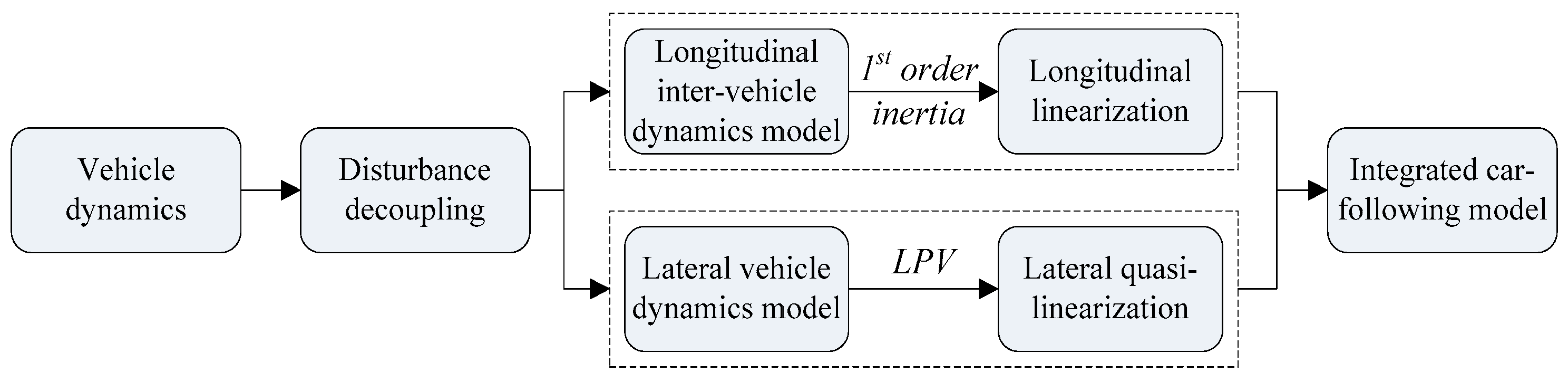
Section 2 is mainly organized as shown in
Figure 1. During the car-following, vehicle dynamics, illustrating the forces acting on the tire contact patches, are established. To simplify the tightly coupled dynamics system, a state-feedback based disturbance decoupling method [
15] is employed, by which longitudinal and lateral dynamics can be completely decoupled. After that, the longitudinal inter-vehicle model and lateral dynamics model are derived, as well as linearized, respectively. Finally, the integrated car-following state space model based on the MPC framework is designed.
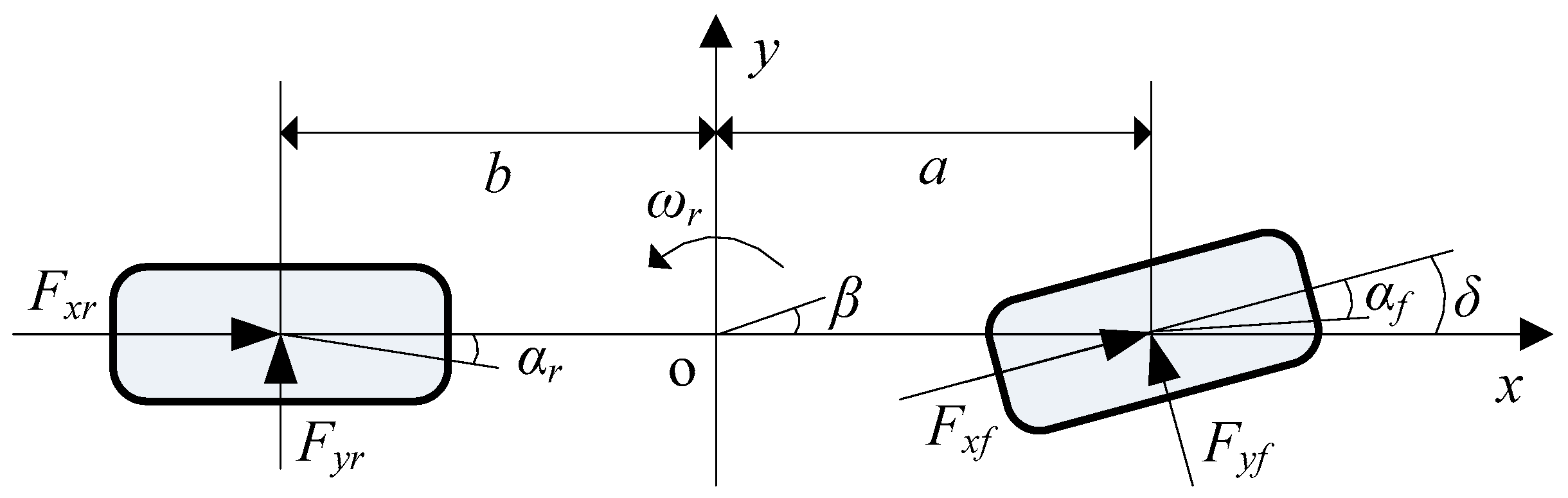
2.1. Vehicle Dynamics
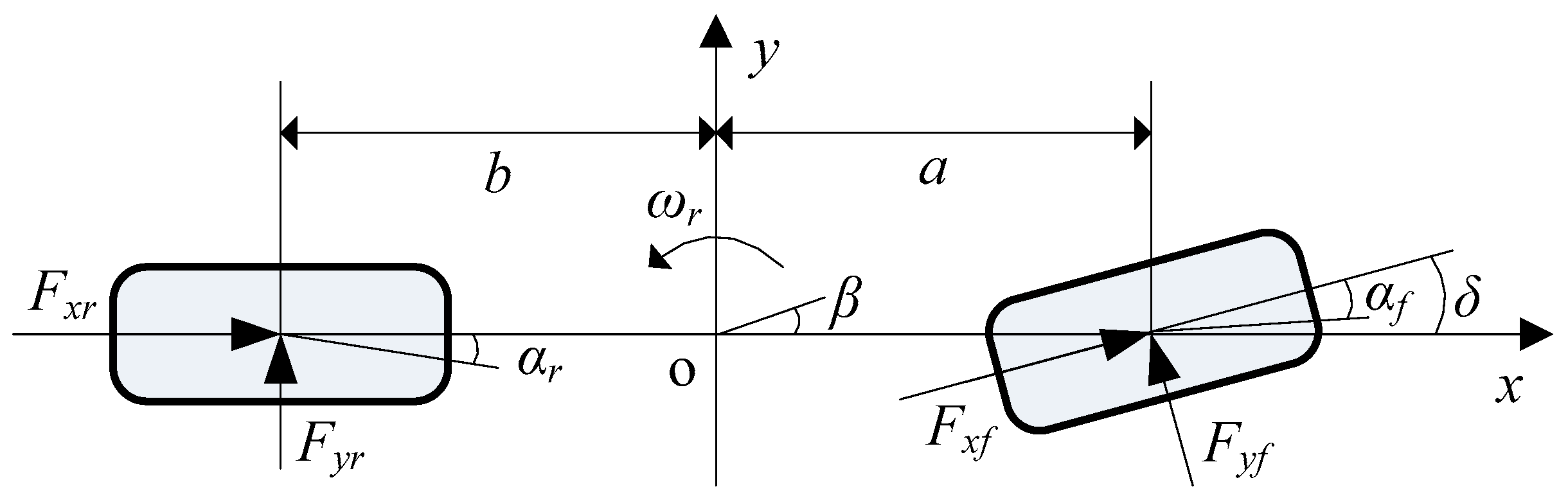
As illustrated in
Figure 2, the longitudinal (
x-direction), lateral (
y-direction) and yaw dynamics during the car-following can be described as the equations below.
where
and
are longitudinal tire contact patch forces, while
and
are lateral ones.
and
are the moment of inertia of the front and rear tires, whose rolling radius is
.
is the longitudinal speed,
is the lateral speed, and
is the yaw rate.
is the mass of the vehicle,
is the gravitational acceleration,
is the rolling resistance coefficient,
is the road wheel angle of the front and
is the road slope.
is the drag coefficient,
is the air density, and
is the frontal area of the vehicle.
and
are the distances from the center of the mass (CM) of the vehicle to the front and rear axles respectively,
is the yaw inertia, and
is the desired yaw moment.
Now the assumptions below are made to simplify Equation (1):
Then we obtain
where
,
.
2.2. Disturbance Decoupling
Furthermore, the lateral forces
and
are assumed to linearly vary with the tire slip angles
and
respectively [
16].
where
and
are the cornering stiffness of the front and rear tires respectively.
Besides, the tire slip angles associated with each wheel can be related to the body side-slip angle
, road wheel angle
and the yaw rate
by the relationships below.
Integrating Equations (3)–(5), we obtain a 2-DOF vehicle model, which can be used for a lateral stability controller design.
Regarding Equation (2), there is a time-varying item:
, which changes with the road wheel angle
, longitudinal speed
, lateral speed
and the yaw rate
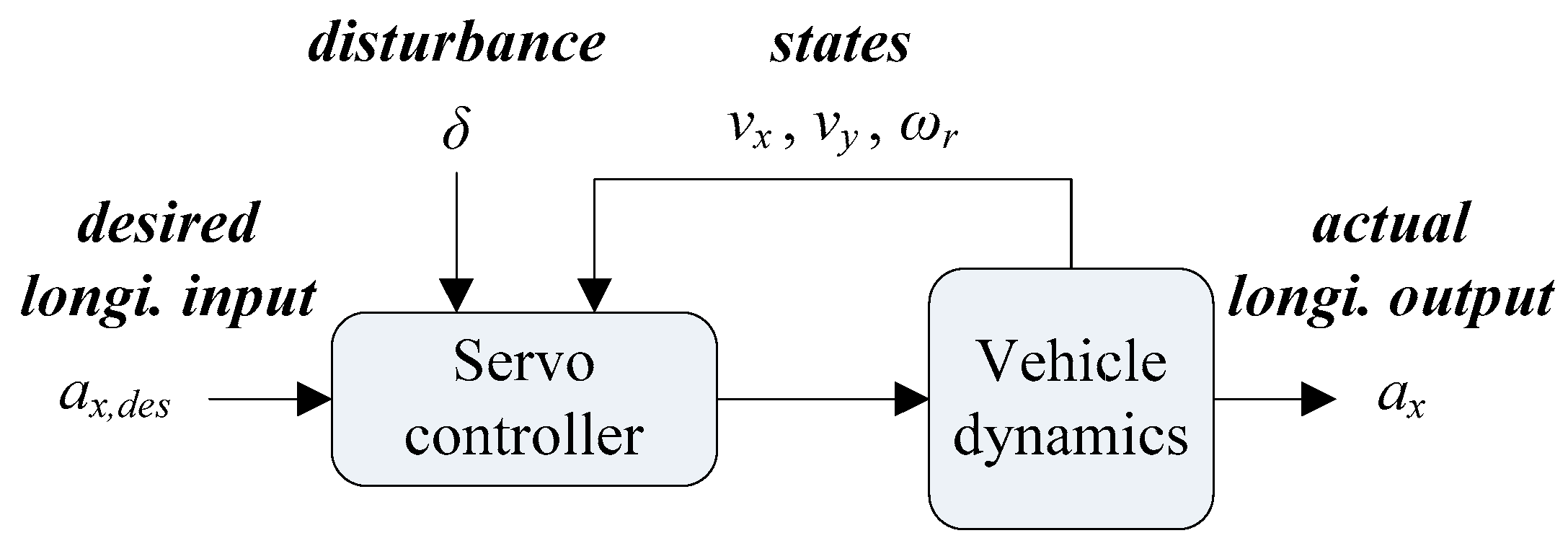
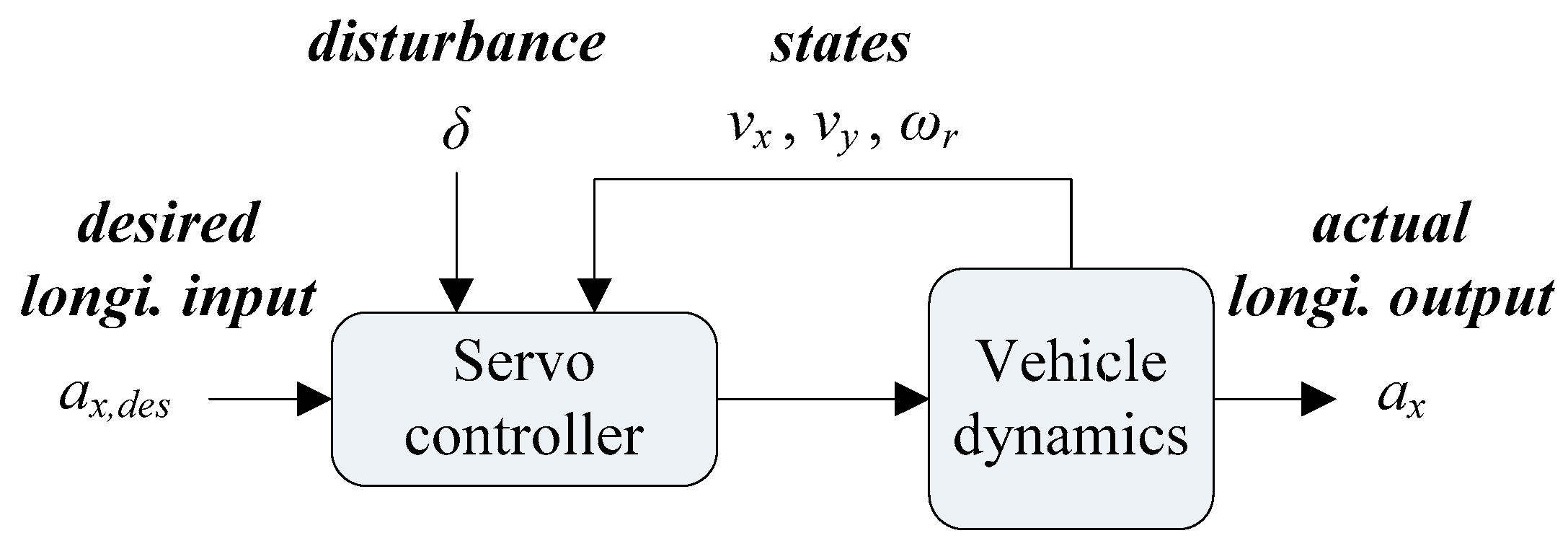
. The idea of disturbance decoupling, as shown in
Figure 3, is trying to find a state-feedback so as to construct a closed-loop system [
15].
Then the decoupled longitudinal dynamics is rewritten as
2.3. Longitudinal Dynamics Model
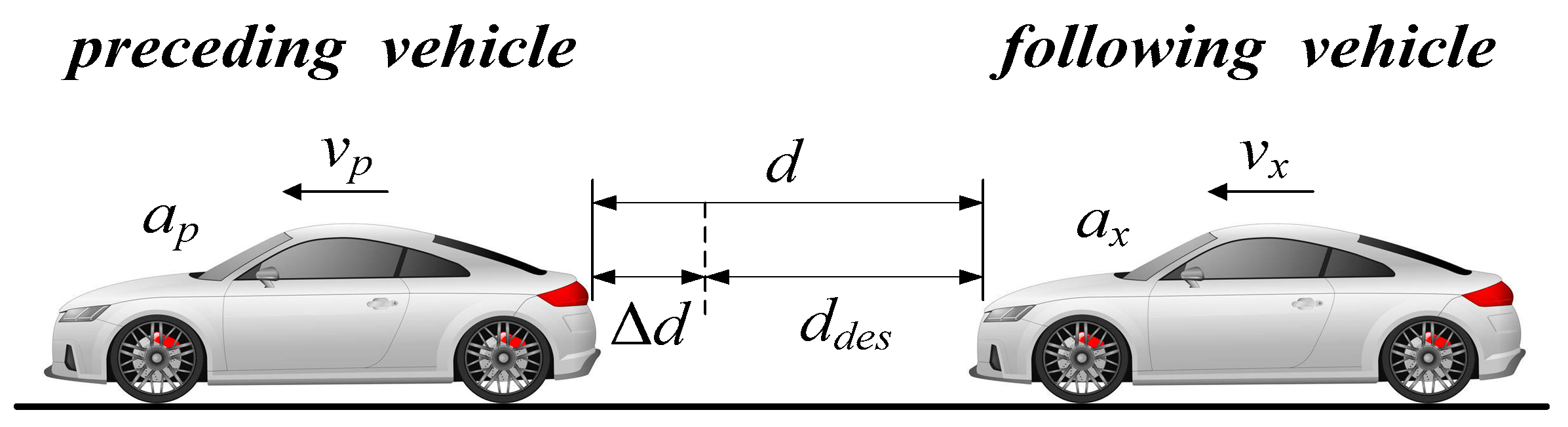
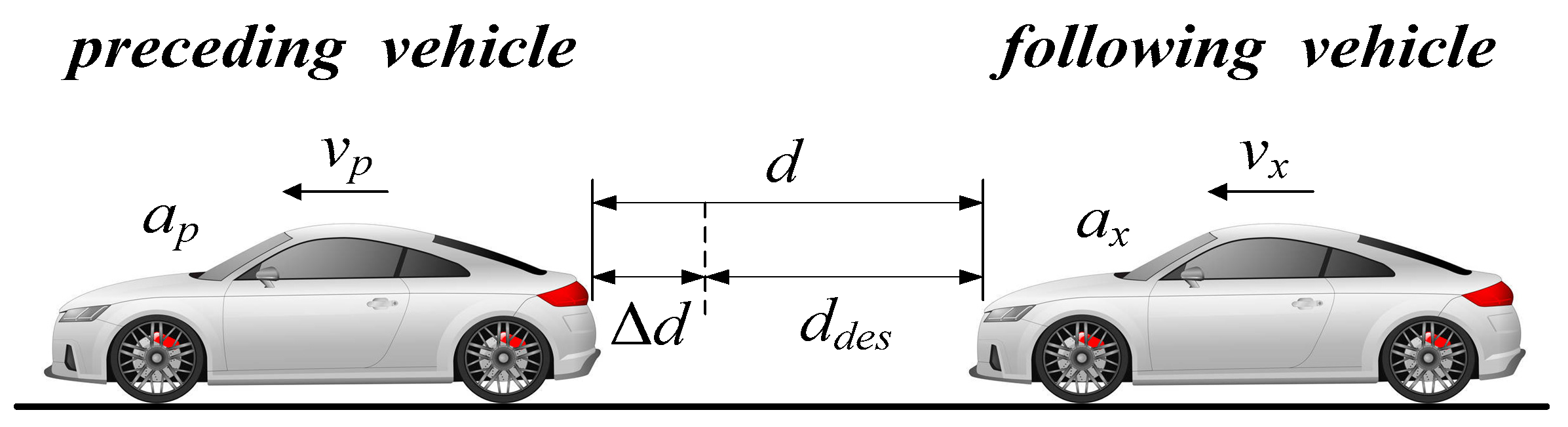
As illustrated in
Figure 4, three state variables are defined: the distance error
, speed error
and derivative of the longitudinal acceleration (jerk for short)
j, which can be described as
where
is the actual inter-vehicle distance,
is the desired inter-vehicle distance,
,
and
,
are the longitudinal speed/acceleration of the preceding vehicle and the following vehicle respectively.
With respect to
, the constant time headway (CTH) spacing policy [
17] is employed, which changes linearly with the speed of the following vehicle.
where
is the nominal time headway and
is the zero-speed clearance.
In addition, the decoupled longitudinal dynamics of the vehicle (see
Figure 3) is still nonlinear, mainly due to the nonlinearity of the engine torque maps, time-varying gear position, as well as aerodynamic drag force [
18]. In order to linearize the longitudinal dynamics of the vehicle, we introduce a first-order inertial system [
5], whose transfer function is described as
where
is the system gain and
is the time constant.
Integrating Equations (8)–(10), a four state space model for longitudinal car-following dynamics can be formulated as
where
,
,
,
k represents the
kth sampling point,
,
and
are the state matrices, mathematically expressed as
2.4. Lateral Dynamics Model
As shown in Equation (6), a 2-DOF model is always used for the lateral stability controller design [
12,
19]. Additionally, the matrix representation of Equation (6) is described as
where
,
,
,
,
and
are the state matrices, mathematically expressed as
Unlike the longitudinal dynamics model, the lateral dynamics model, whose state matrices change with the longitudinal speed
, is time-varying. This means that the discretization of the state matrices should be carried out in every control cycle, with
(the length of the predictive horizon) times increased on this basis if the receding horizon control (e.g., MPC) method is employed. Additionally, the main problem this causes is that the system’s real-time performance will be greatly worsened. To reduce the considerable computational burden, a linear parameter-varying (LPV) method [
20] is applied, changing the nonlinear model into a linear parameter-varying one.
Firstly, the state matrix
can be described as
where
,
,
.
Secondly, two boundary vectors can be obtained because
and
achieve maximum / minimum values at the same time.
Then, the local linearization of Equation (13) in the boundaries can be expressed as
Thirdly, employing the zero-order hold (ZOH) method [
5] with a sample time
, the discretization of the state matrices in the boundaries can be expressed as
Finally, a two state space model for the lateral dynamics can be formulated as
where
,
,
,
,
,
,
is weight coefficient, and
.
During the MPC control process, the discretization of the state matrices, shown as Equation (16), is just carried out once. Additionally, in each control cycle, only the weight coefficient needs to be adjusted. Therefore, the LPV method has its merits in solving the problem earlier mentioned.
2.5. Integrated Car-Following Model
Via the integration of the longitudinal dynamics model (refer to Equation (11)) and lateral dynamics model (refer to Equation (17)), the IACC control plant model is built as
where
,
,
,
,
,
and
are the state matrices, mathematically expressed as
3. Quantification of Performance Indexes
3.1. Cost Function for Longitudinal Car-Following Performance
It is accepted that the longitudinal car-following performance is usually evaluated via tracking errors: and . However, the strong convergence of tracking errors will result in a frequent acceleration or deceleration, which might weaken the lateral stability and also reduce the longitudinal ride comfort or fuel economy, while the poor convergence will also cause a great amount of problems such as frequent cut-in, unsatisfied driver response, or even rear-end collision. Thus, the longitudinal performance indexes are designed to achieve:
During the steady car-following scenario, the tracking errors should converge to tiny values;
If the preceding vehicle accelerates, the tracking errors should be in a driver-permissible tracking error range to reduce frequent cut-in or driver intervention, and while it decelerates, rear-end collision must be avoided;
As the fuel consumption increases with the absolute increase of the vehicle acceleration [
7], the fuel economy can be improved indirectly via penalizing acceleration;
To promote longitudinal ride comfort, the longitudinal jerk should be decreased as much as possible [
5];
The level of longitudinal acceleration should be restrained to some extent to guarantee sufficient lateral stability [
12].
Accordingly, employing a 2-norm for tracking errors, actual acceleration, jerk and desired acceleration, the longitudinal cost function is built as
where
,
,
,
and
are the corresponding weight coefficients.
3.2. Cost Function for Lateral Stability
Generally, the direct yaw control (DYC) is introduced to improve the vehicle lateral stability which is critical to vehicle safety [
11,
12]. The purpose of DYC is to make the yaw rate error and side-slip angle error convergent to zero by means of adding an external yaw moment. However, the yaw moment is always generated from a differential braking, which will weaken the longitudinal tracking capability. Thus, the yaw rate error, side-slip angle error, as well as desired yaw moment should be penalized simultaneously.
Similarly, the lateral cost function is built as
where
,
and
are the corresponding weight coefficients.
,
,
,
is the nominal vehicle lateral dynamics response [
12].
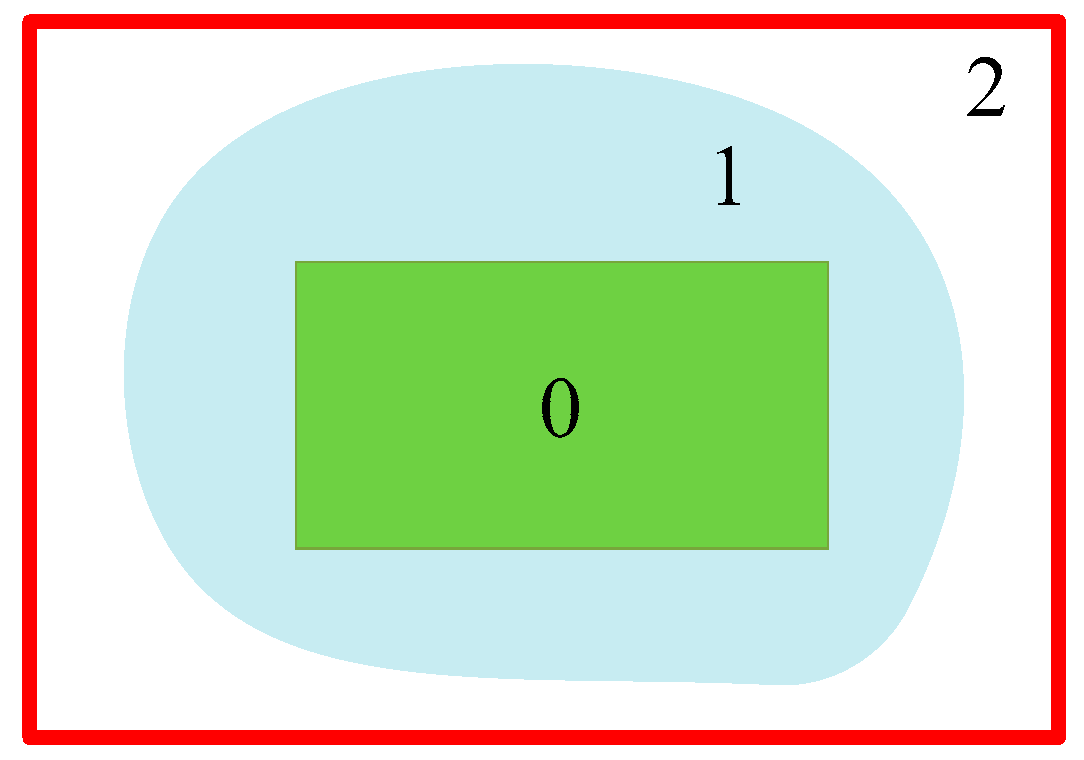
3.3. Rear-End Safety
To avoid rear-end collisions, an inequality for rear-end safety is specified as
where
is the actual inter-vehicle distance,
is the safe inter-vehicle distance,
is the critical minimum safe distance, and
is the time-to-collision (TTC) value [
5].
The constraint, shown as Equation (21), should be considered as a hard constraint, owing to the fact that a rear-end collision cannot be tolerated at all.
3.4. Adhesion Workload
As the longitudinal tracking capability, along with the lateral stability, is closely related to road adhesion, the adhesion workload is defined as
where
is the maximum road adhesion coefficient and
is the lateral acceleration. This further indicates that dangerous situations such as drift will occur if Equation (22) is violated. Thus, Equation (22) should also be considered as a hard constraint.
3.5. I/O Constraints
In view of vehicular physical limitations as well as the driver-permissible tracking error range, the minimum/maximum values of the control commands and state variables are constrained as follows.
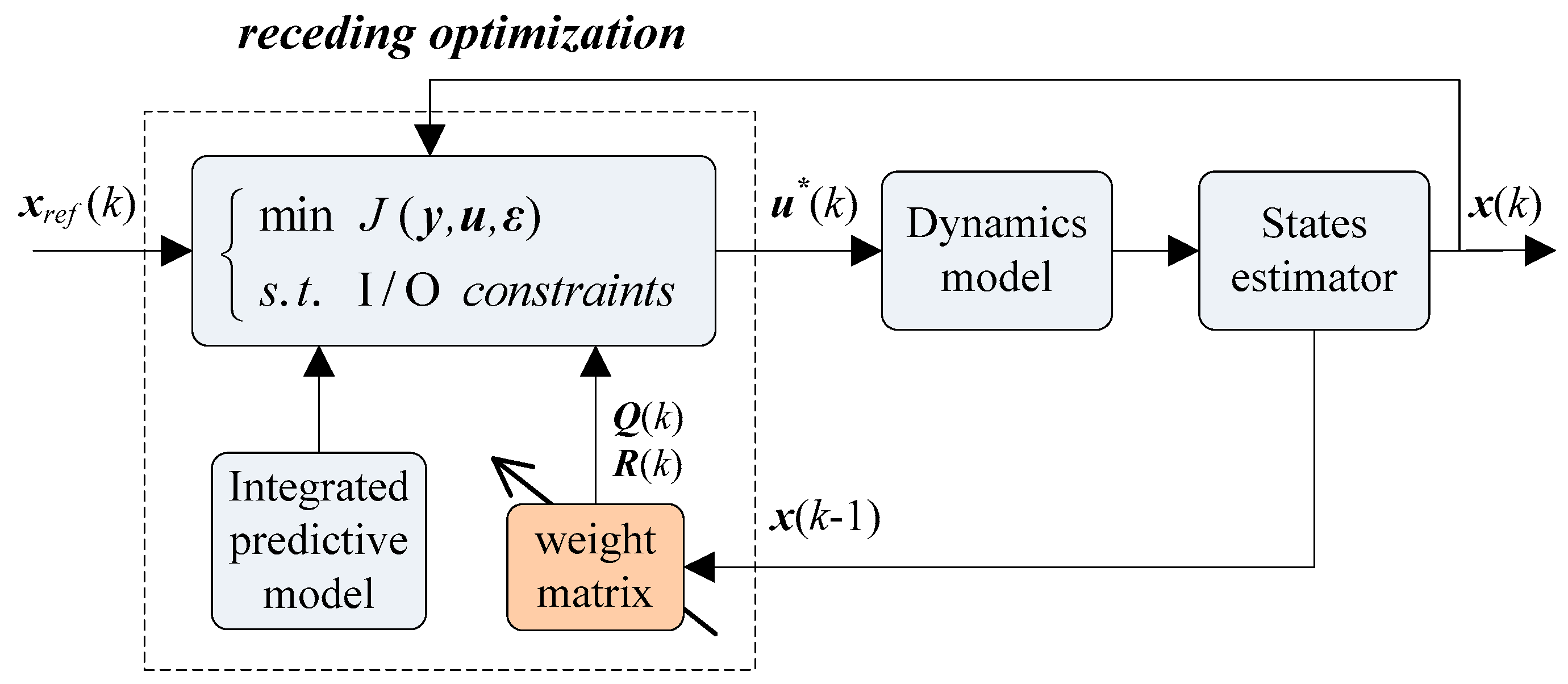
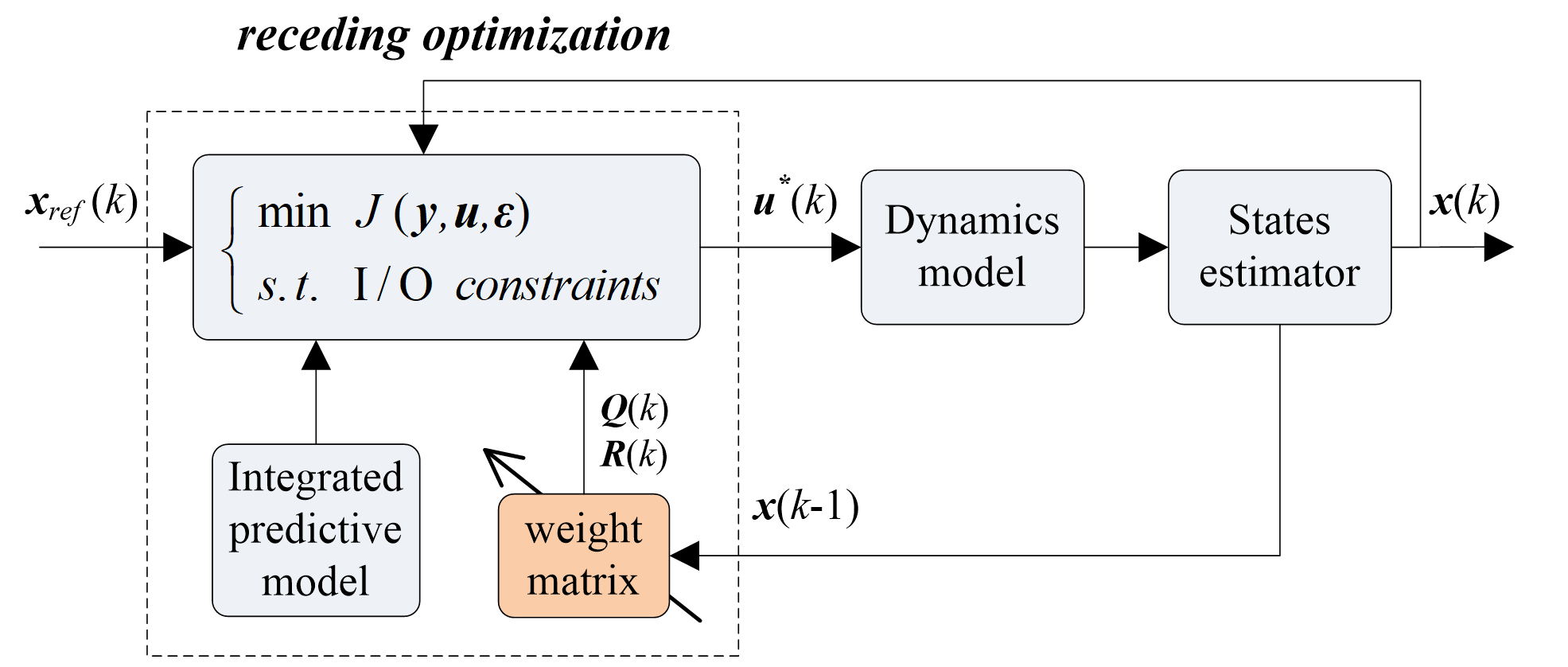
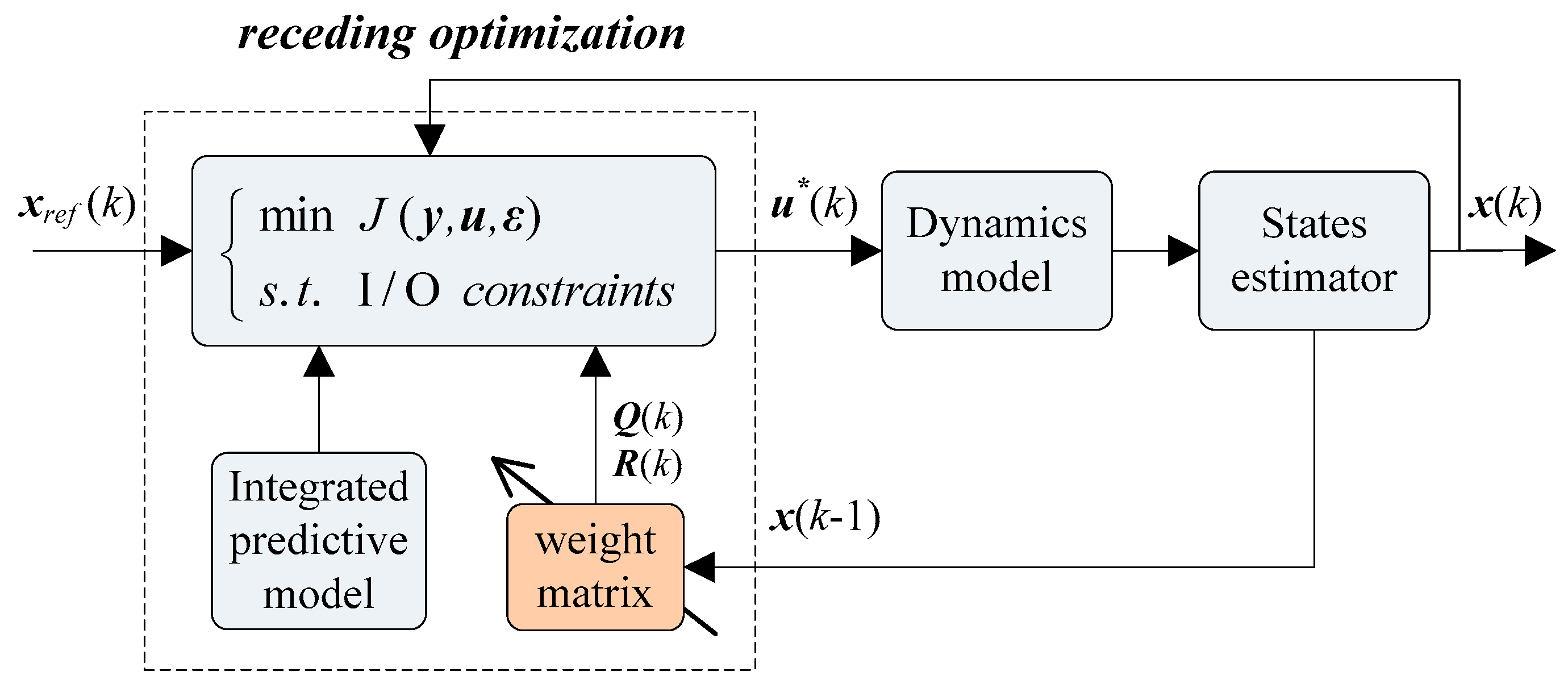
3.6. Predictive Expression of Cost Function
To guarantee lateral stability, the differential braking which is used for generating the direct yaw moment, gives rise to the longitudinal deceleration, accordingly weakening the longitudinal car-following performance, while the over-pursuit for tracking capability would affect the lateral stability, which is extremely crucial to vehicle safety. Thus, the longitudinal tracking capability as well as lateral stability control should be coordinated simultaneously.
Integrating Equations (19) and (20), the
p-steps predictive expression of the cost function is built as
where
is the reference trajectory,
and
are the diagonal weight matrices,
are the desired input values to be optimized.
5. Simulations and Analysis
To validate and evaluate the improved performance of the proposed IACC controller with the weight coefficient self-tuning strategy, several numerical comparative simulations are conducted utilizing Matlab/Simulink and Carsim. The main parameters of the IACC controller are shown in
Table 1.
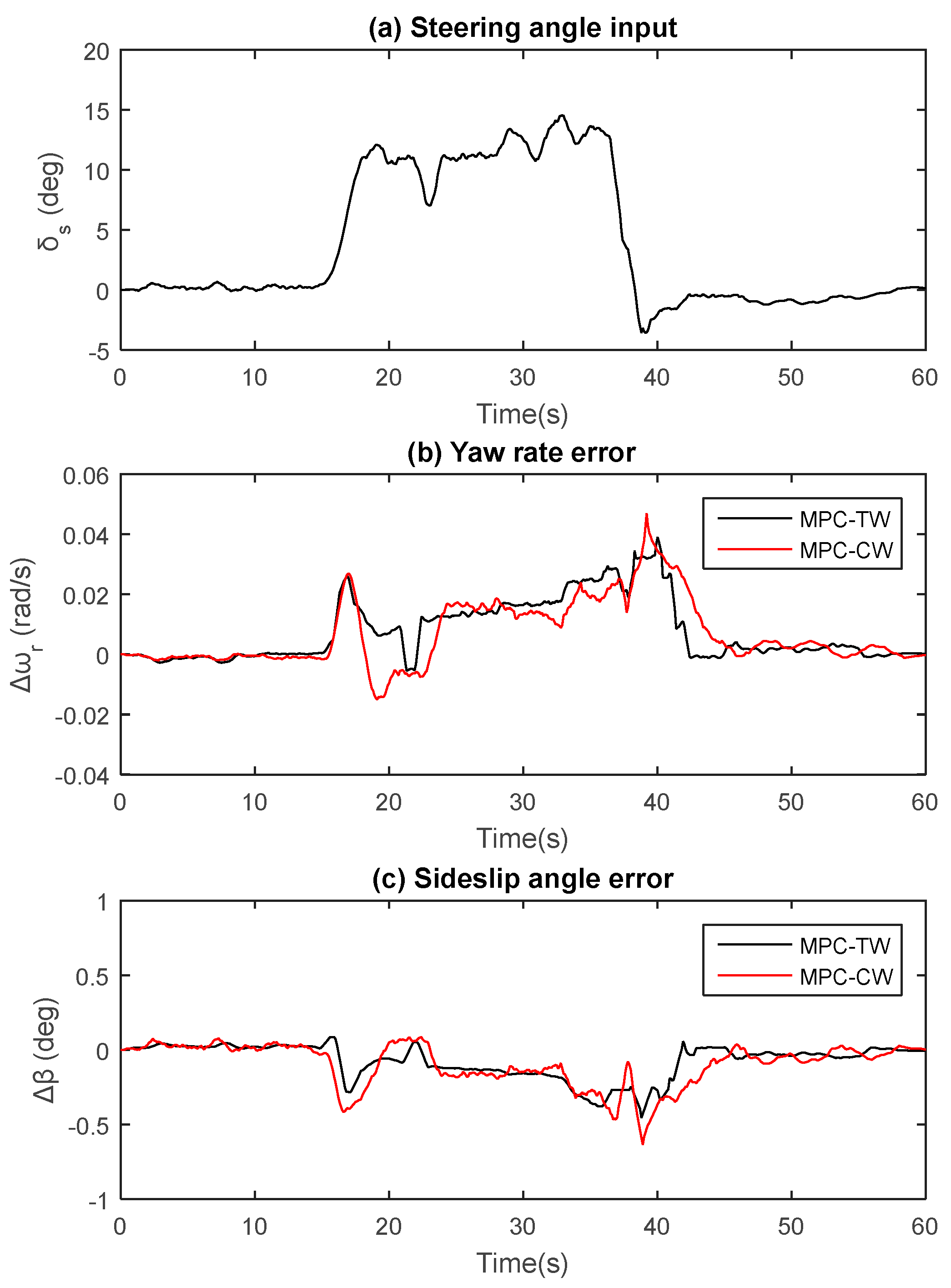
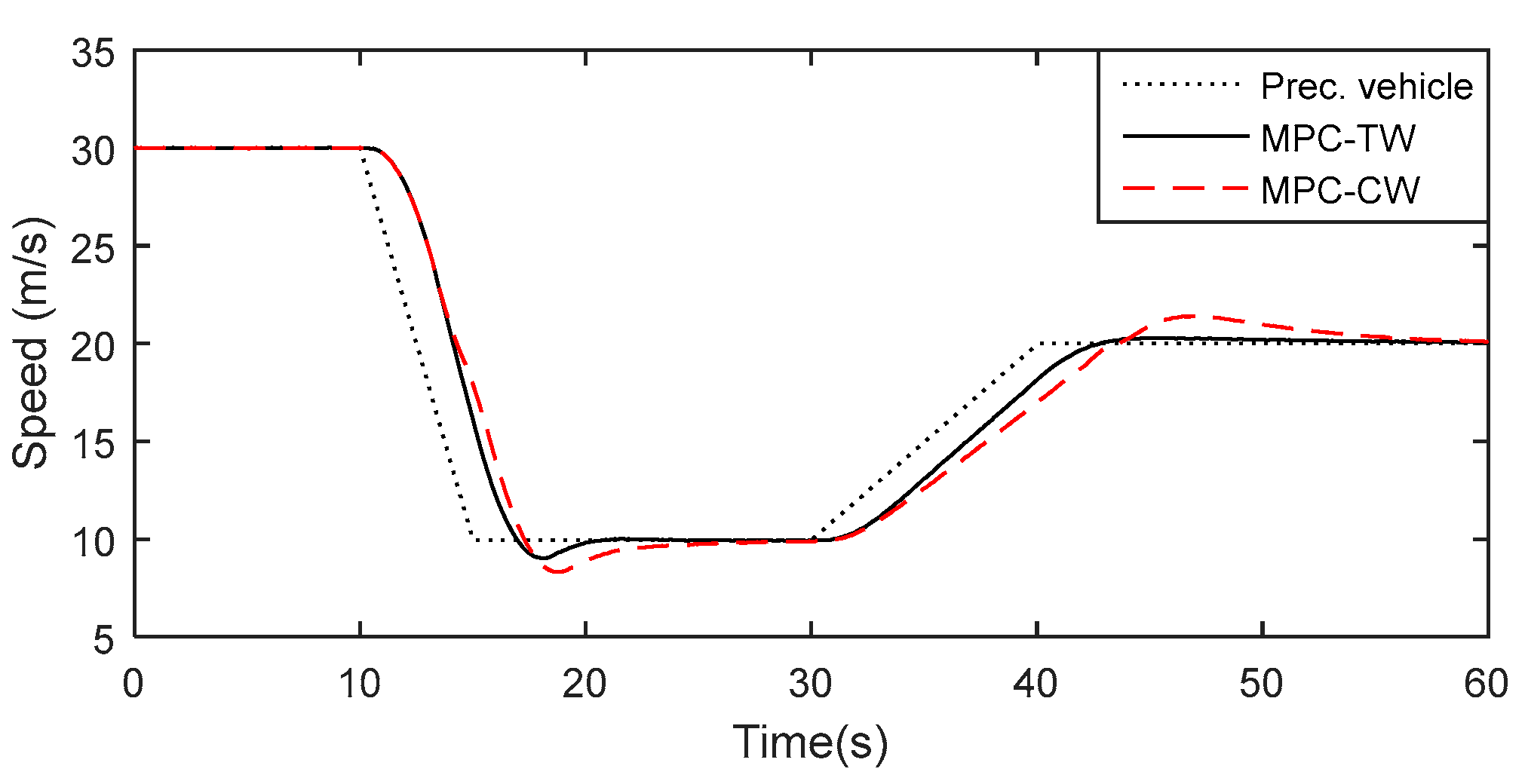
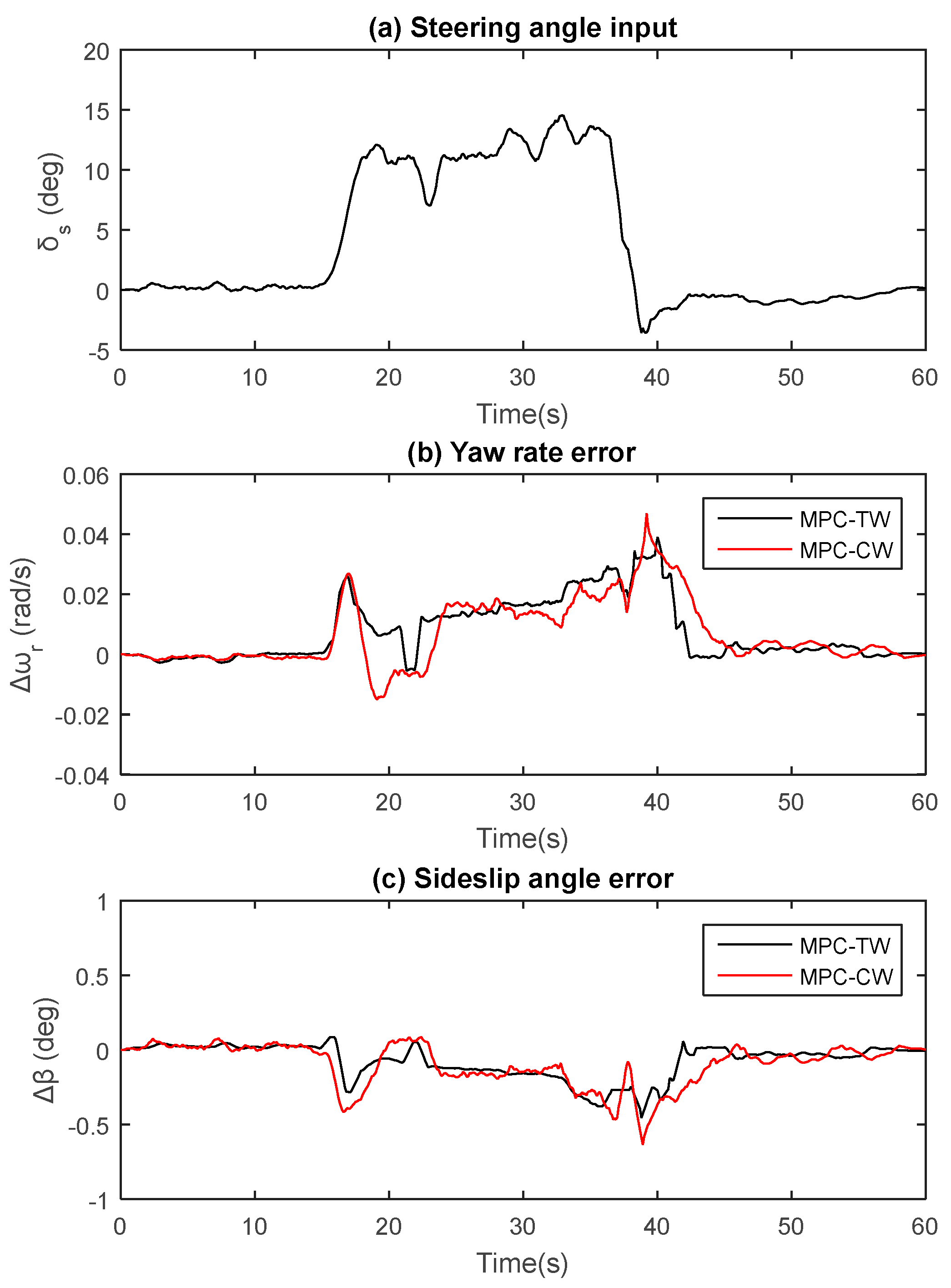
The test scenario is supposed to be that the preceding vehicle, with an initial speed of 30 m/s, slows into the curve road with an emergent deceleration of −4.0 m/s2, then maintains a speed of 10 m/s for 15 s, and afterwards speeds up with an acceleration of 1.5 m/s2 to drive away, provided that the radius of the curve road is 350 m and that the tire-road friction coefficient is 0.8. What is more, the MPC based integrated control algorithm with tunable weight coefficients is simply called MPC-TW for short, while MPC-CW is short for the comparative one with constant weight coefficients.
During the steering maneuver, priority should be given to lateral stability for driving safety consideration. Lateral stability (maintaining a small lateral stability error range) should be guaranteed for both MPC-TW and MPC-CW. As shown in
Figure 7, both control methods can achieve a better performance in lateral stability.
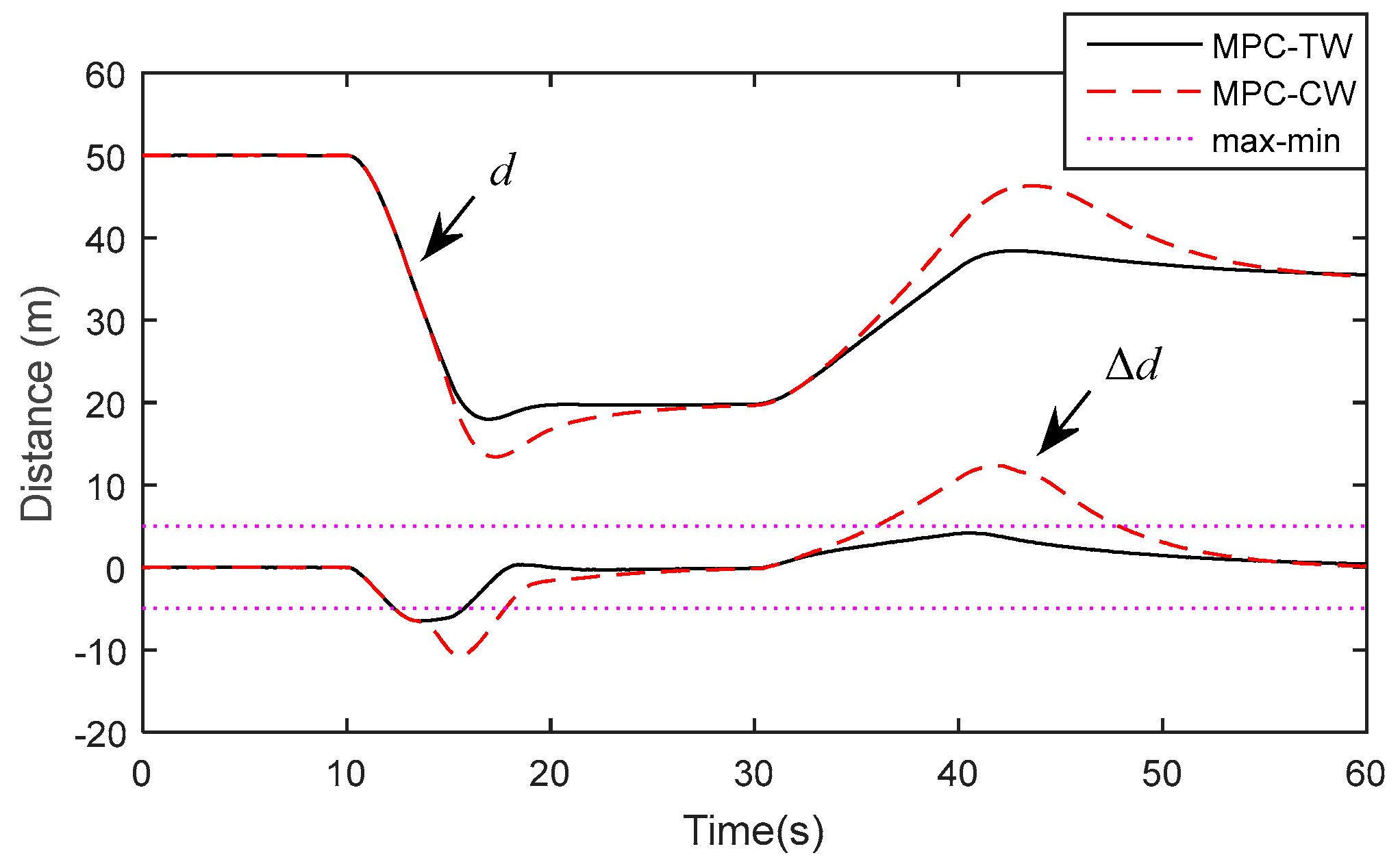
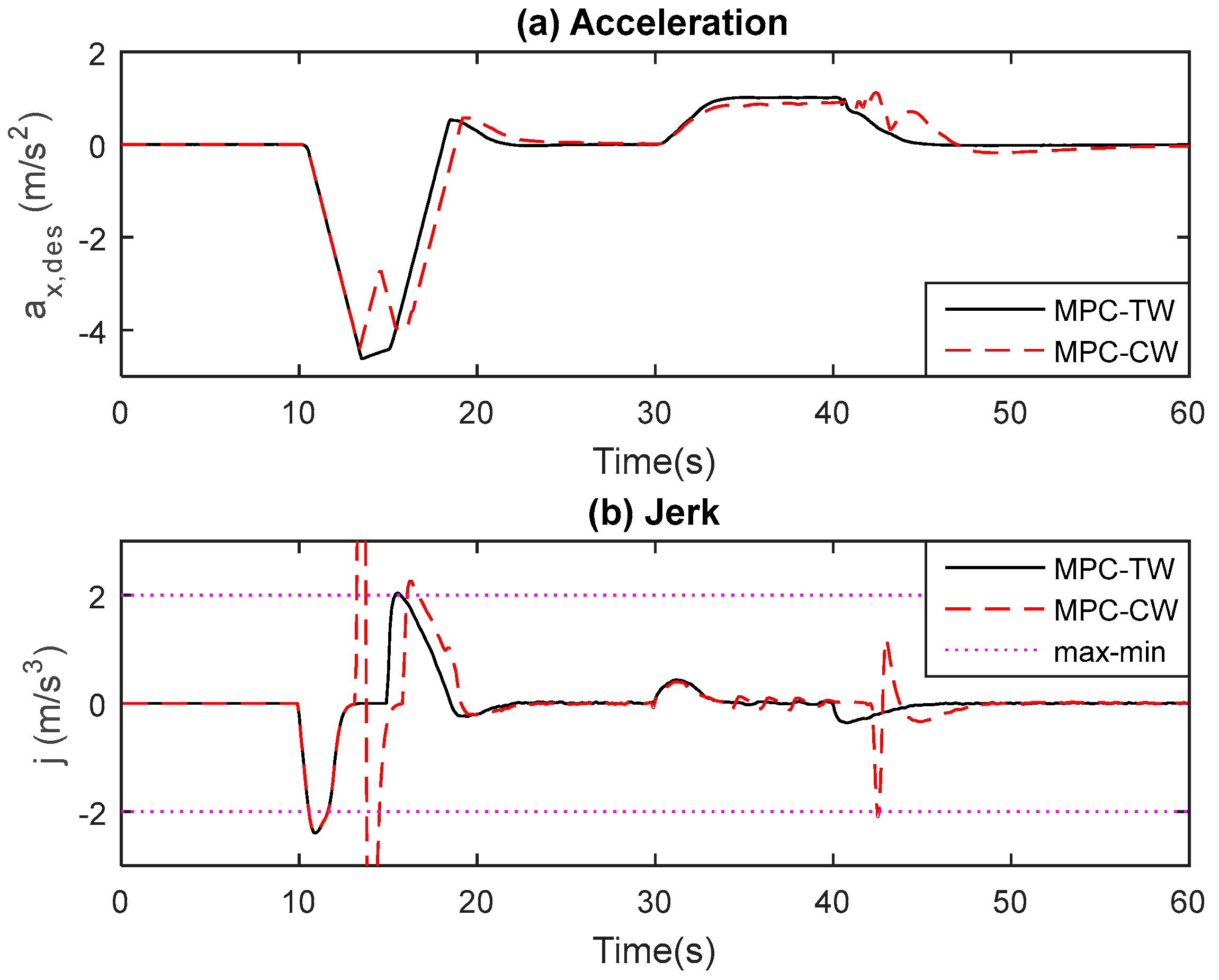
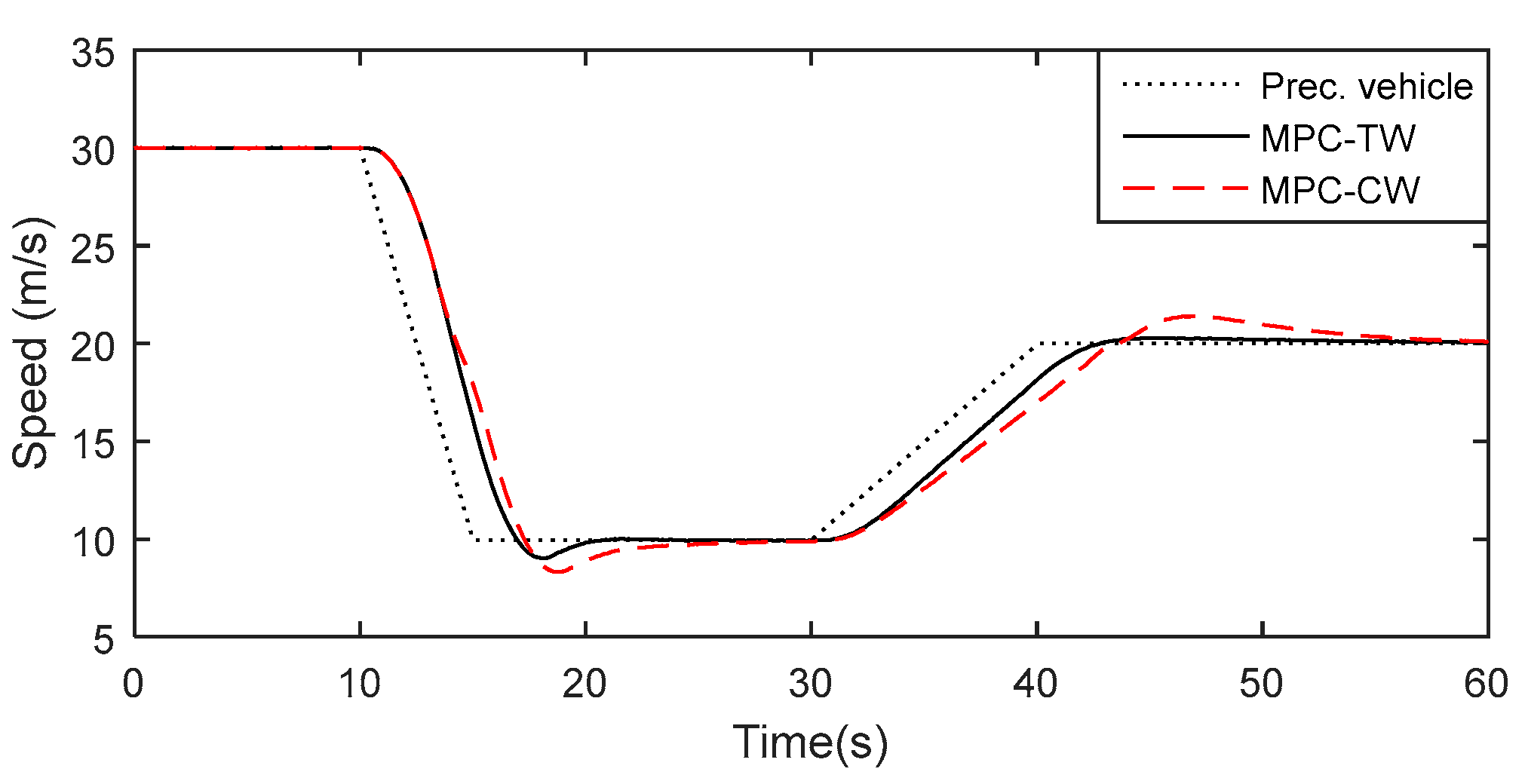
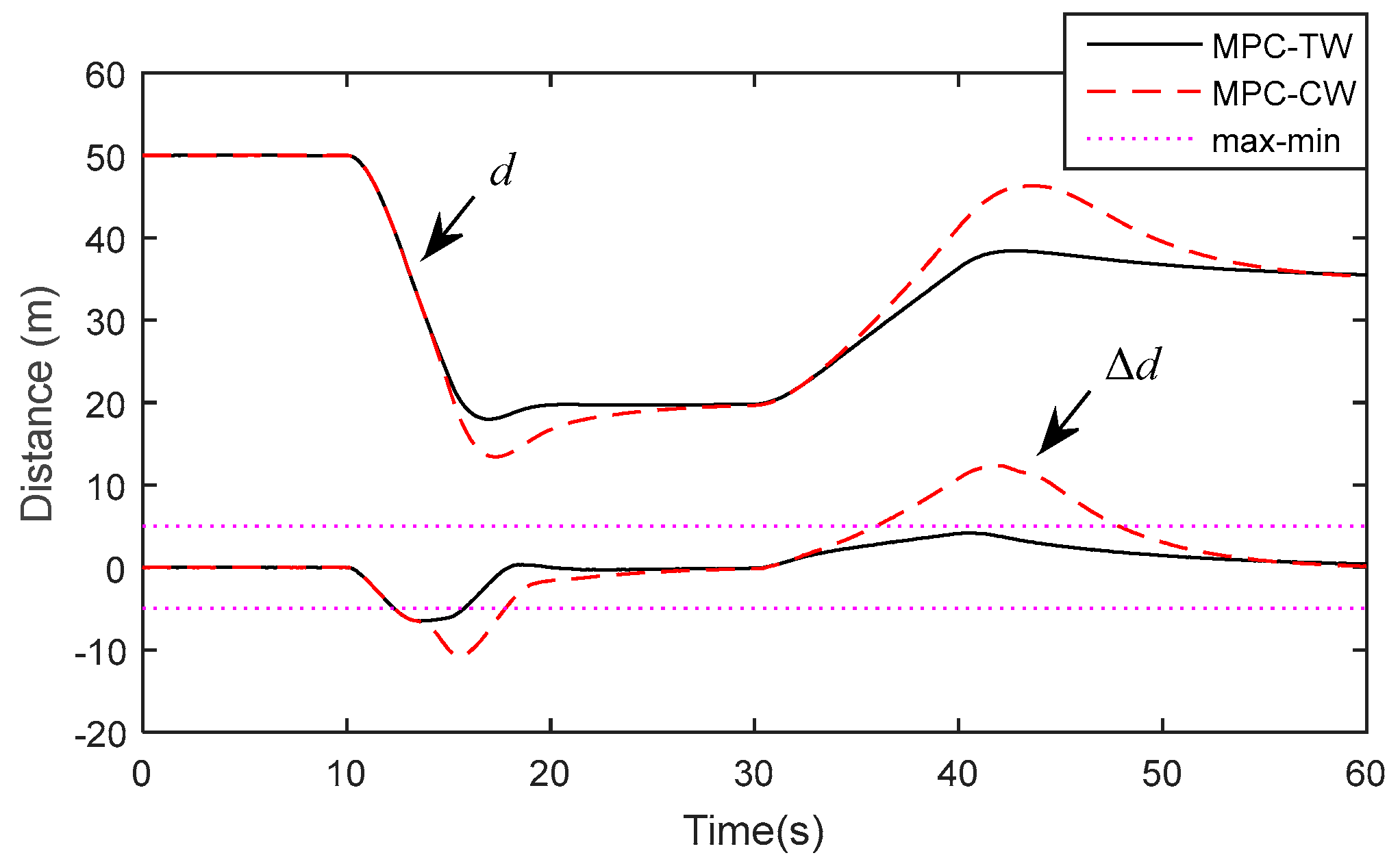
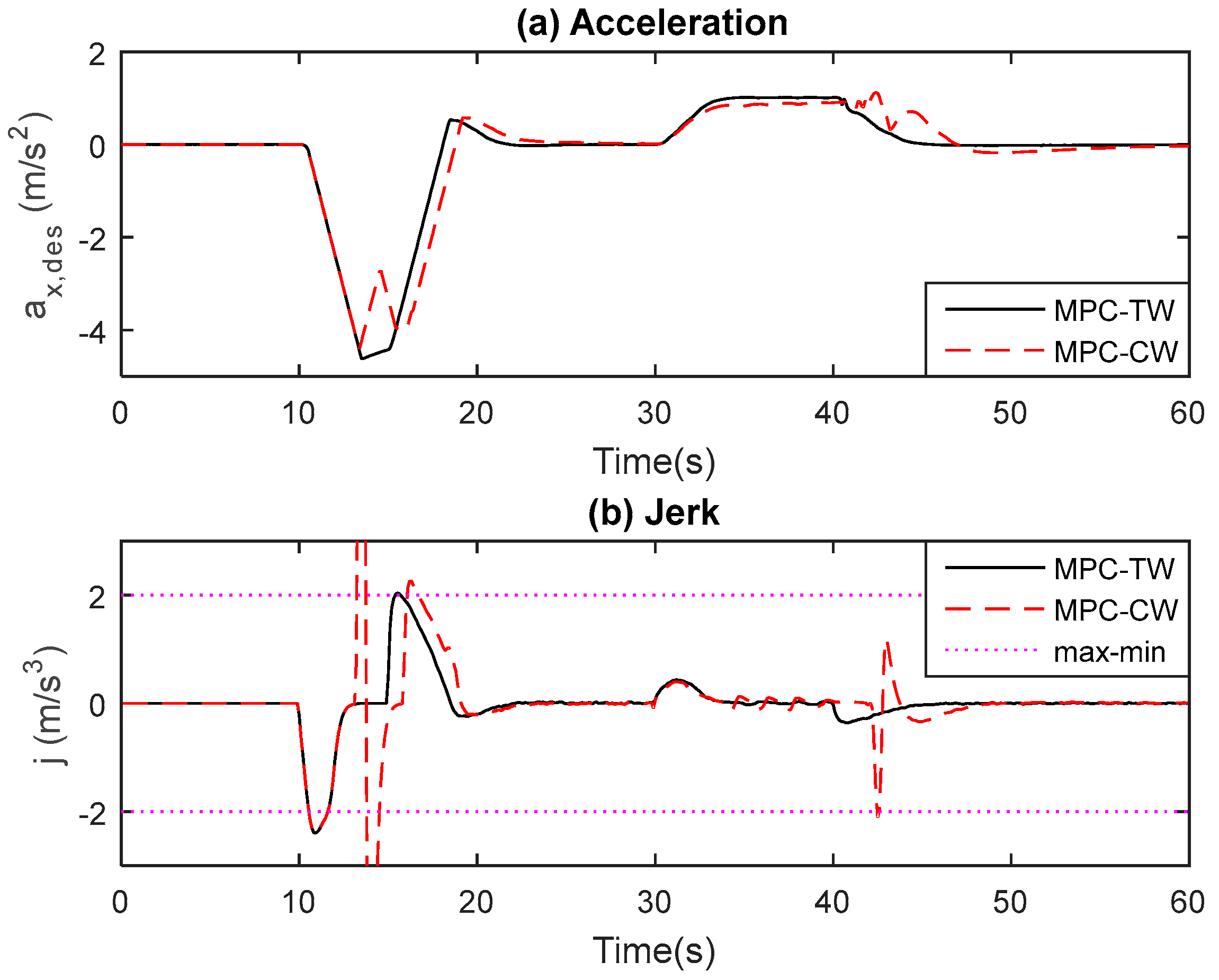
Figure 8,
Figure 9 and
Figure 10 show the longitudinal tracking response of speed, distance, acceleration and jerk, respectively. From
Figure 8 and
Figure 9, one can see that the MPC-CW cannot provide a substantial braking force in time when the preceding vehicle decelerates emergently at 10 s, and accordingly the inter-vehicle distance becomes shorter than that of MPC-TW. As shown in
Figure 10, the MPC-TW can take an immediate brake as a result of tunable weights and also avoid overshooting to some extent, accordingly improving the longitudinal ride comfort. Furthermore, during the steering maneuver, the tracking capability of MPC-CW (from 30 s or so in
Figure 8 and
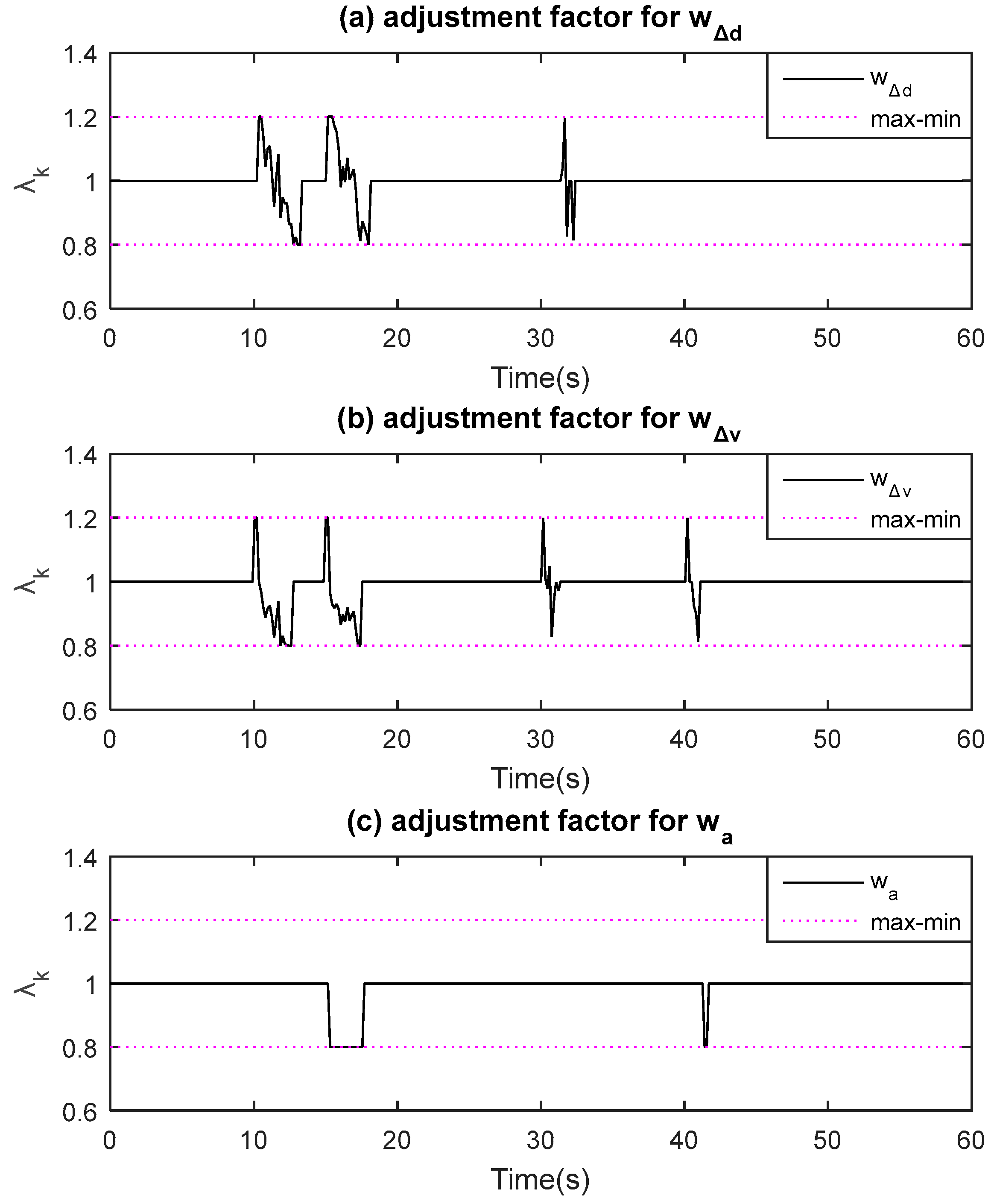
Figure 9) is somewhat sacrificed due to the extra brake pressure generated from the direct yaw moment. However, MPC-TW is able to weaken the impact of DYC applied to the longitudinal car-following performance by automatically tuning the weights of
,
and
(see
Figure 11), while maintaining a small lateral stability error range (see
Figure 7). Moreover, from
Figure 9, one can see that the introduction of a slack variable vector into the hard constraints (refer to Equation (23)) is able to satisfy the upper/lower boundary of inequality by increasing the corresponding slack variable when the boundary exceeds, shown as Equation (25), accordingly avoiding computing infeasibility.
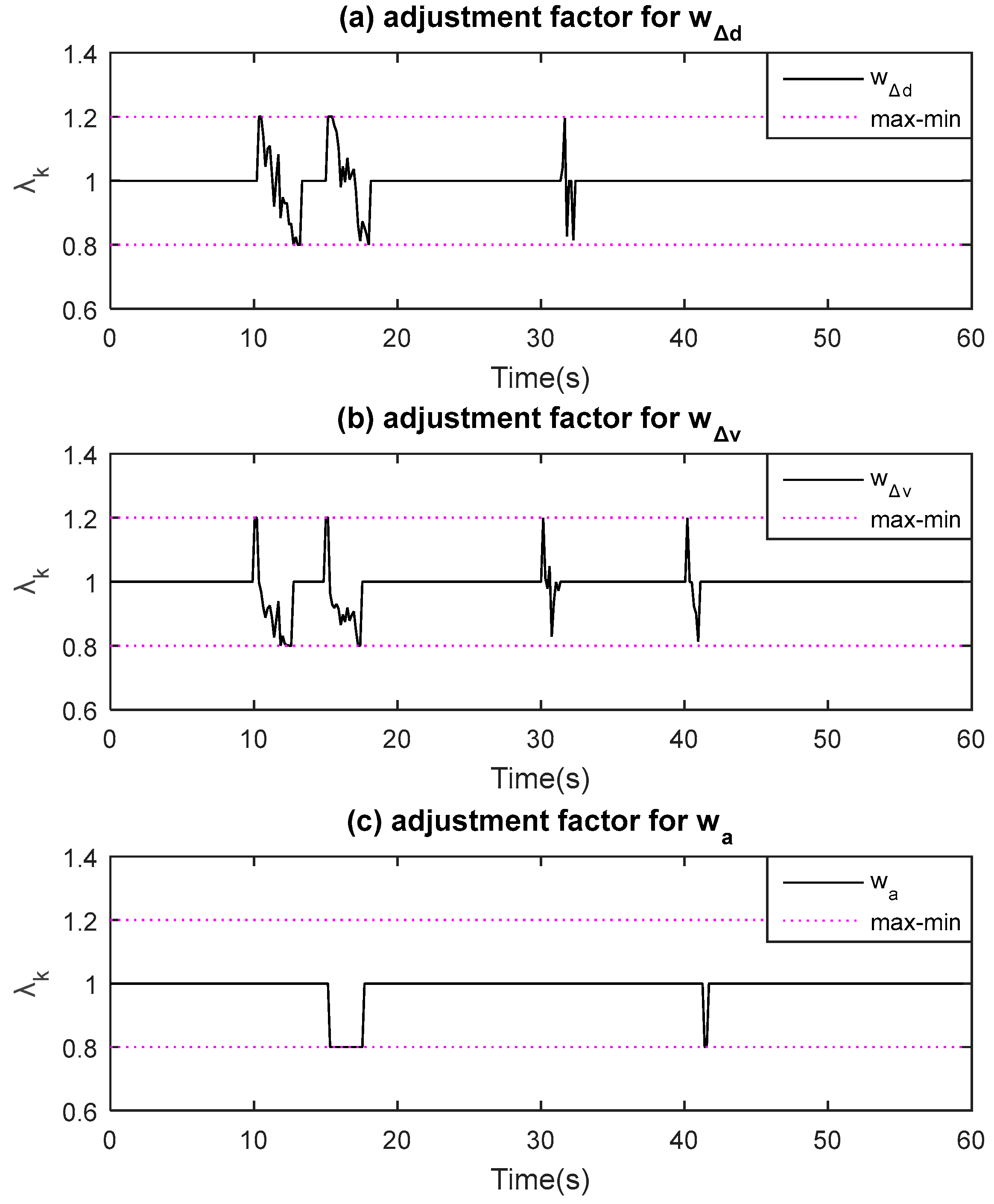
Figure 11 shows the adjustment factor of the weight coefficient based on the self-tuning strategy suggested as Equation (27). Under the emergent scenario (from 10 s to 20 s or so), the weight of the desired acceleration, as well as the speed error, decreases because the corresponding adjustment factor shifts to less than 1, which indicates that the penalty for
in the cost function becomes weakened, accordingly achieving a substantial braking force (see
Figure 10) and also maintaining a better tracking capability (see
Figure 8 and
Figure 9).
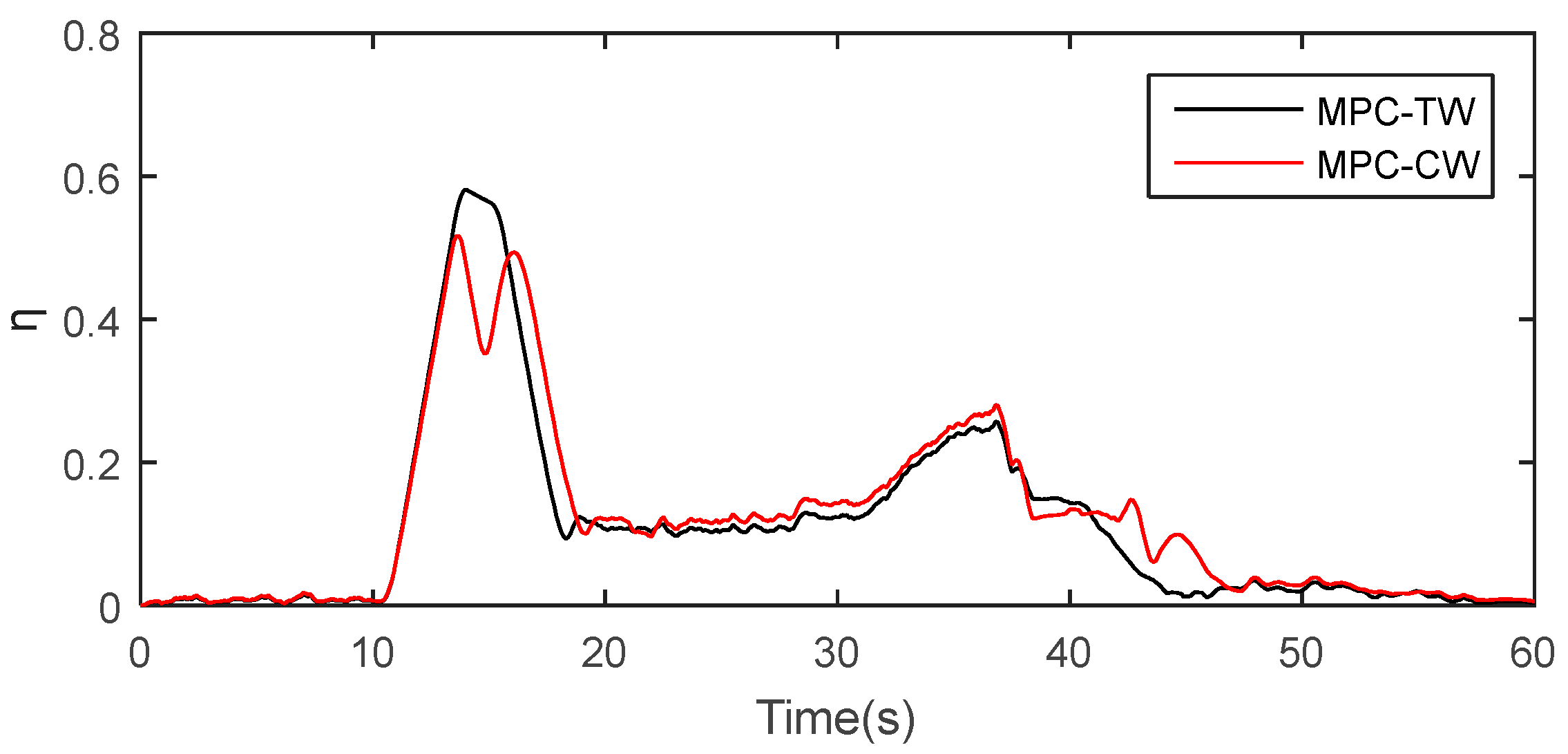
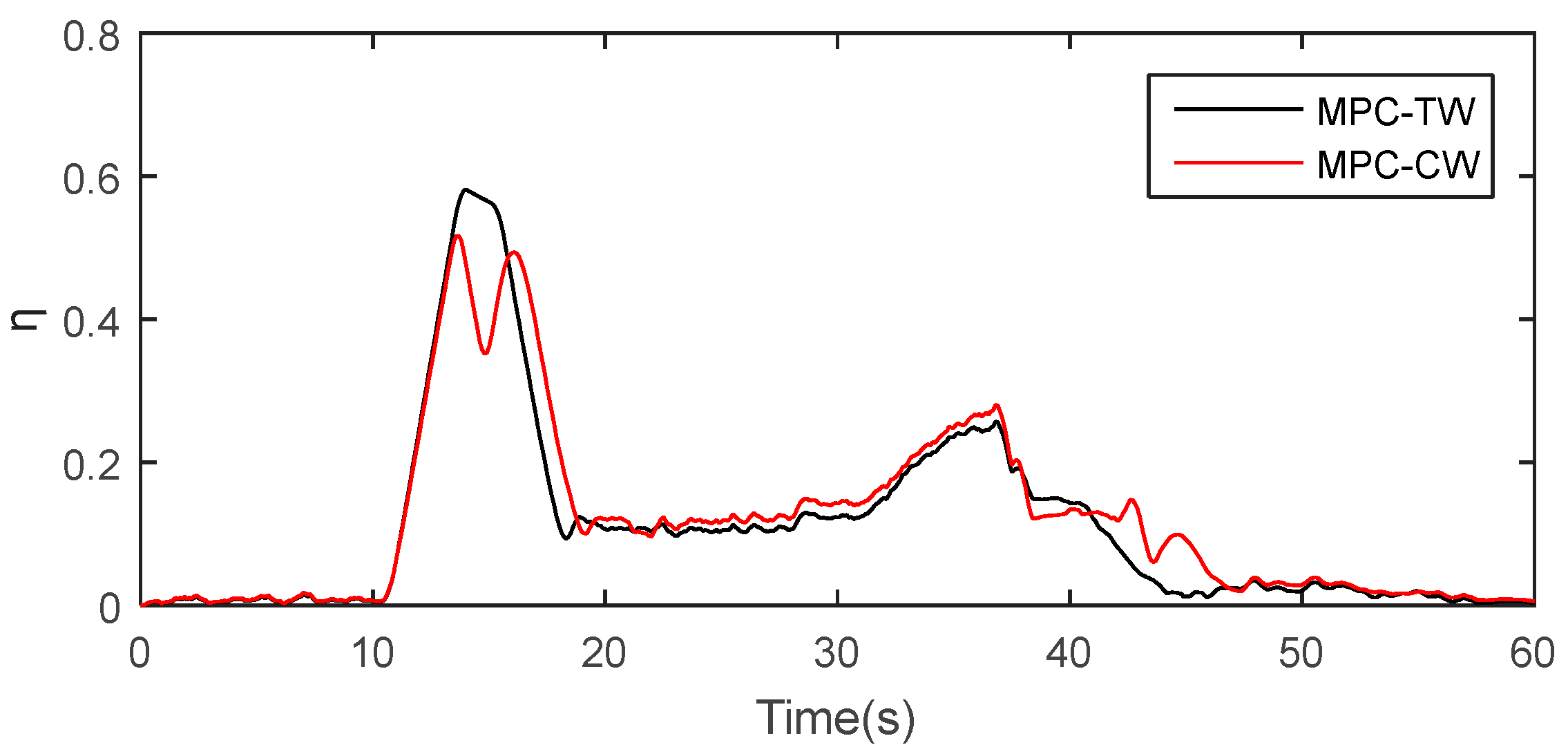
Additionally, a small adhesion workload means that the tires are far from the adhesion limit and that the vehicle still has great capacity for acceleration/deceleration and lateral stability [
12]. As shown in
Figure 12, the peak values for MPC-TW and MPC-CW are about 59% and 52%, respectively, accordingly guaranteeing another hard constraint, shown as Equation (22). Dangerous situations, such as spin or drift, always happen when the adhesion workload tends to its peak [
12]. Although the proposed model improves the longitudinal tracking capability and lateral stability, it therefore clearly reduces vehicle safety. That is to say, under the transient scenarios, the pursuit for the longitudinal tracking capability as well as lateral stability should be sought under the premise of sufficient road adhesion capacity. Additionally, this means that the designing of an upper/lower boundary of the adjustment factor, shown as Equation (27), is in relation to the adhesion workload.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}