A Simplified Free Vortex Wake Model of Wind Turbines for Axial Steady Conditions



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Simplified Free Vortex Wake
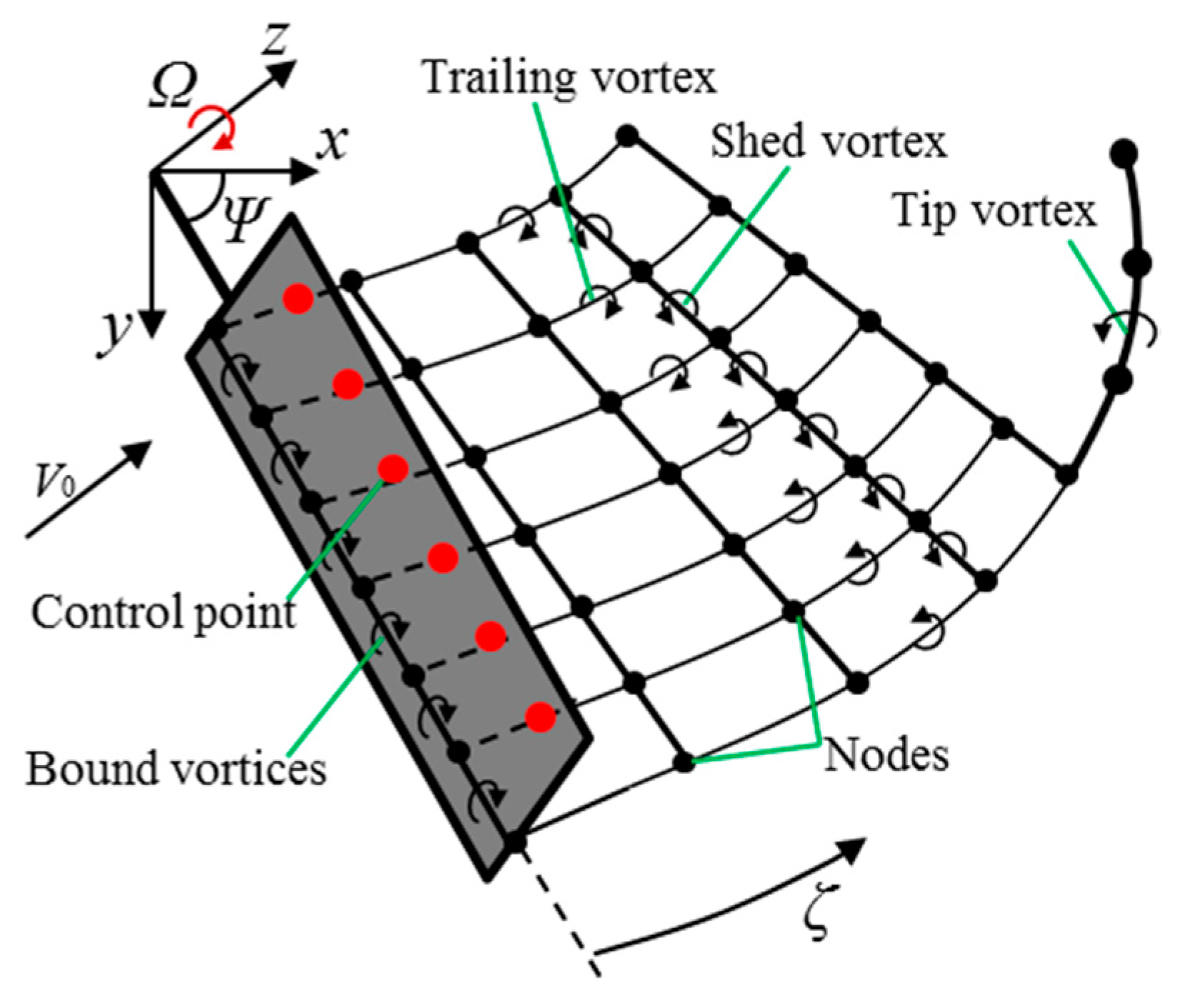
2.1. Blade Model
2.2. Near Wake Model
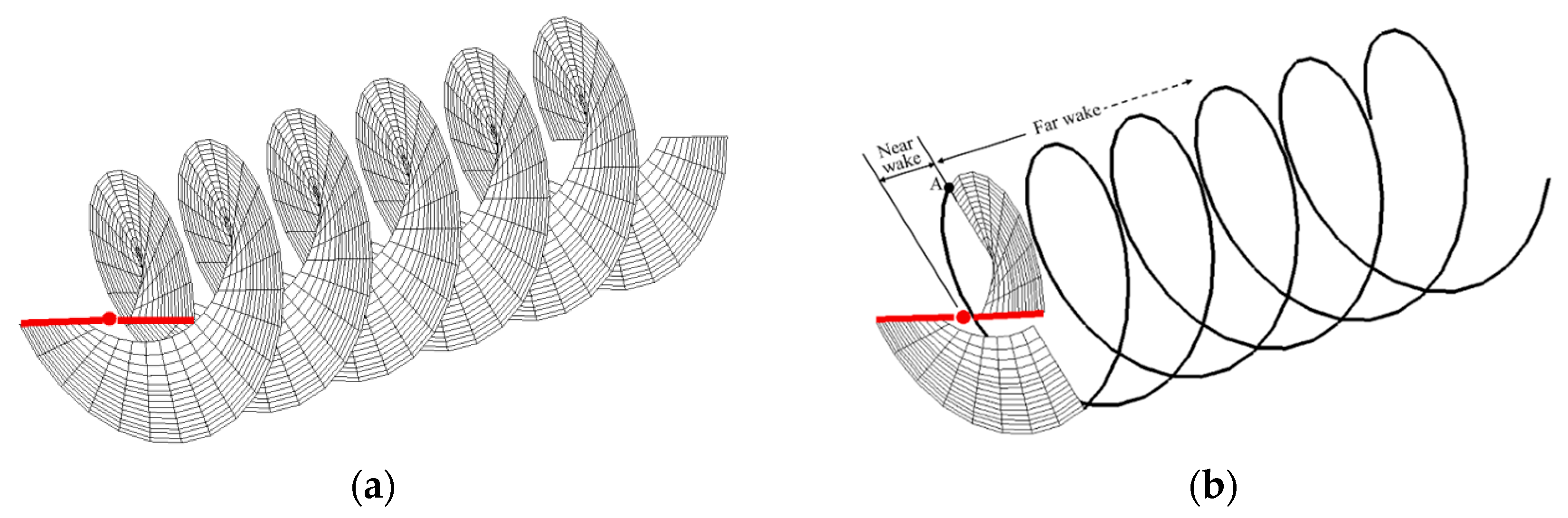
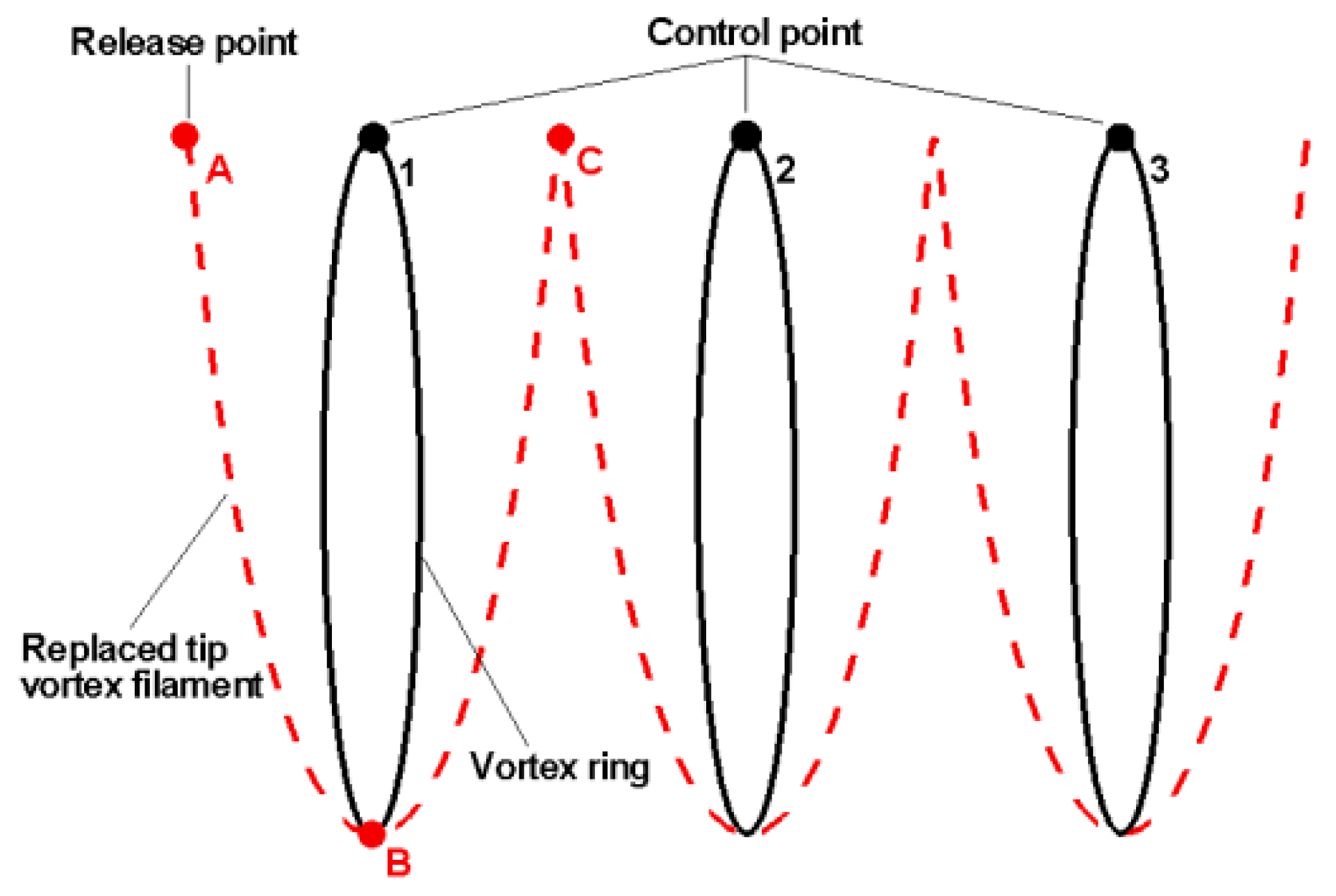
2.3. Far Wake Model
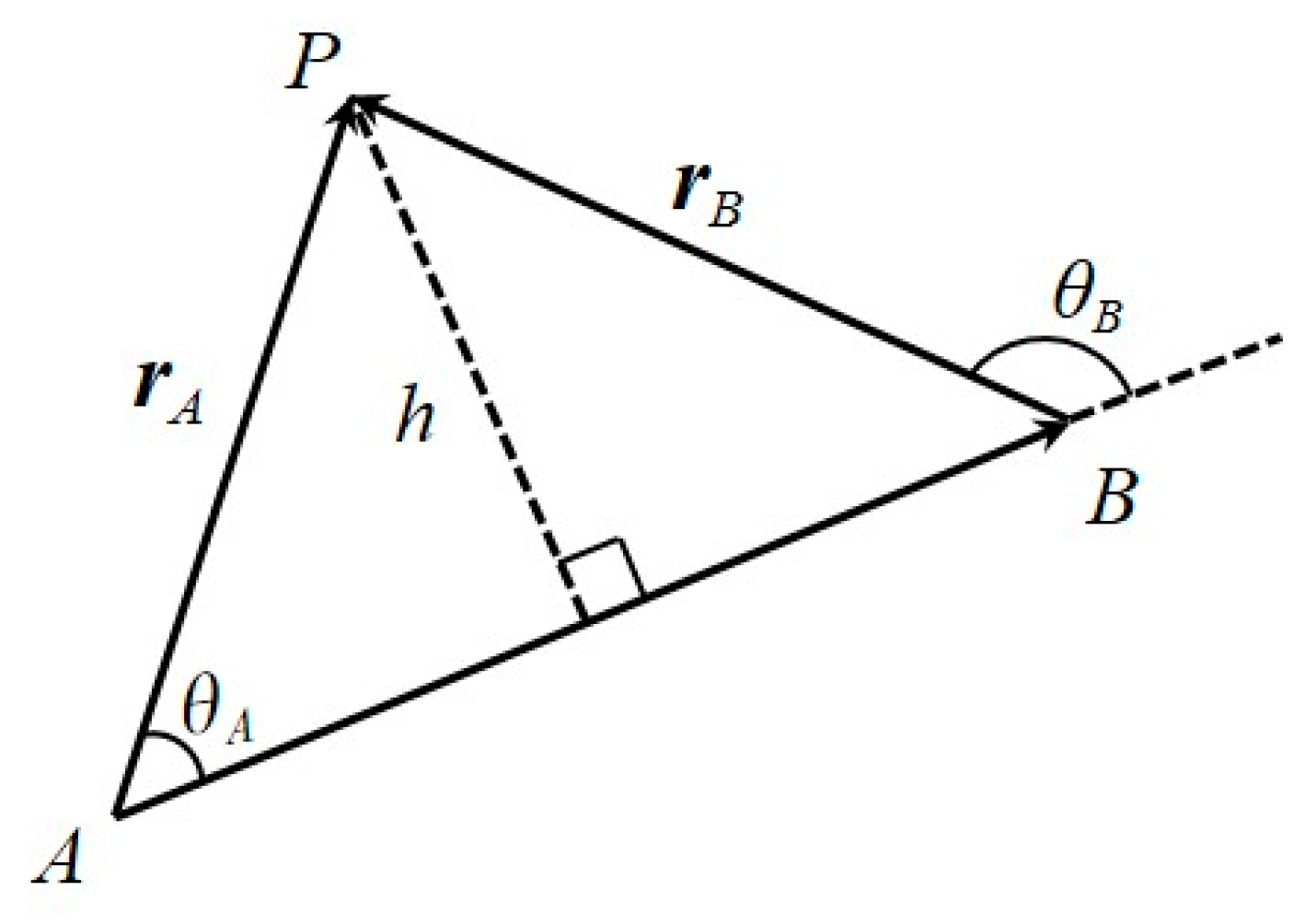
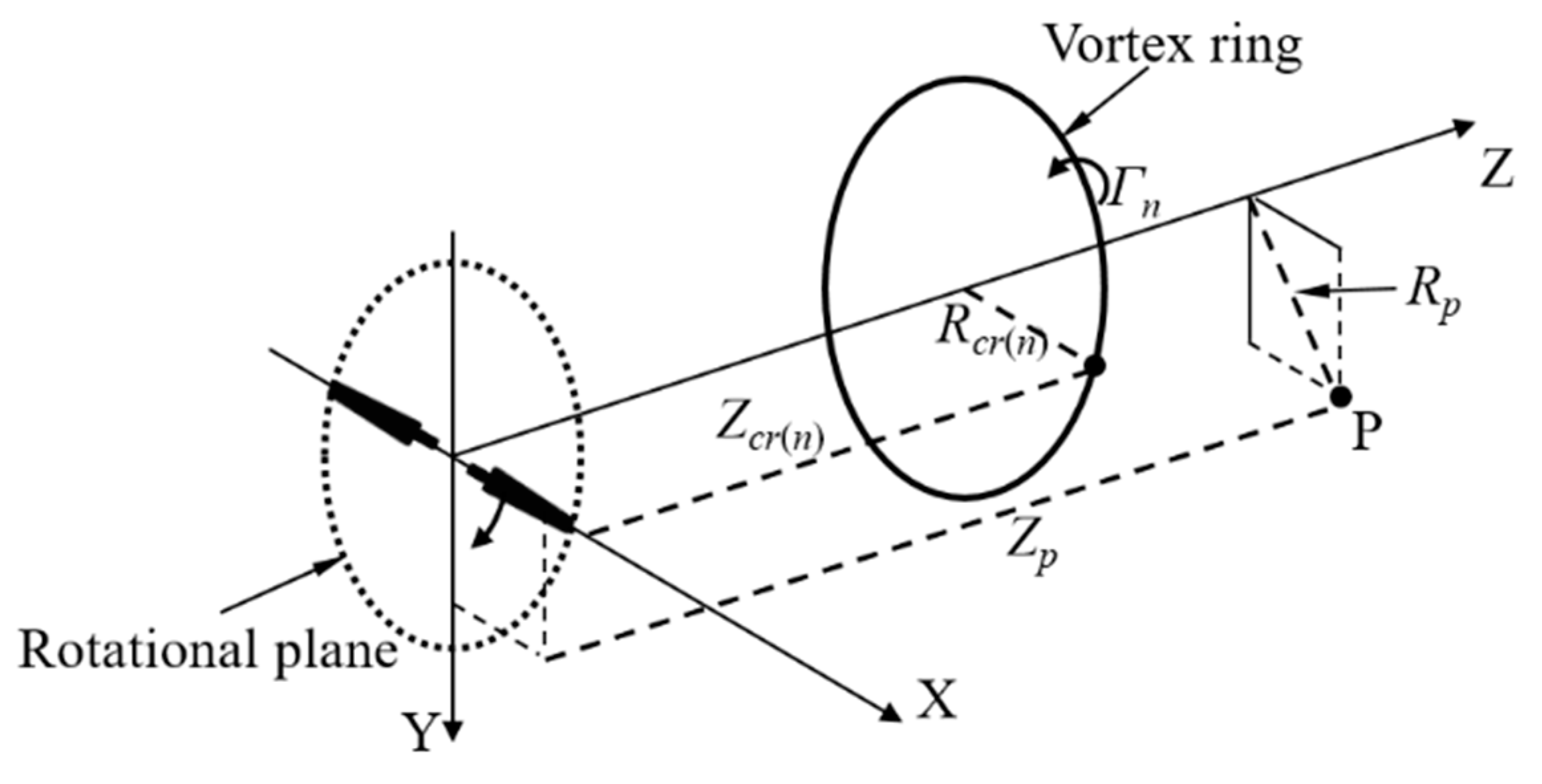
2.4. Velocity Induced by the Near Wake and the Far Wake
2.4.1. Velocity Induced by the Near Wake
2.4.2. Velocity Induced by the Far Wake
2.5. Calculation Procedure
- In step 2, the initial wake geometry of the near wake consists of a set of regular helixes. The initial wake geometry of the far wake is calculated by Equations (5) and (6) and the initial induced velocities in the two equations equal 0.
- In step 5 and step 7, the velocity at the node and the control point induced by the vortices is calculated using the methods in Section 2.4.
- In step 6, the five-point central difference approximation is used to solve the convection equation of the vortex filaments in the near wake and Equations (5) and (6) are used to obtain the shape and location of the vortex rings in the far wake.
- In step 8, the root mean square (RMS) change between the new wake geometry and the old wake geometry of the two iteration steps is calculated. If the RMS change is less than a prescribed tolerance of 10−4, convergence is achieved. Otherwise, return to step 3.
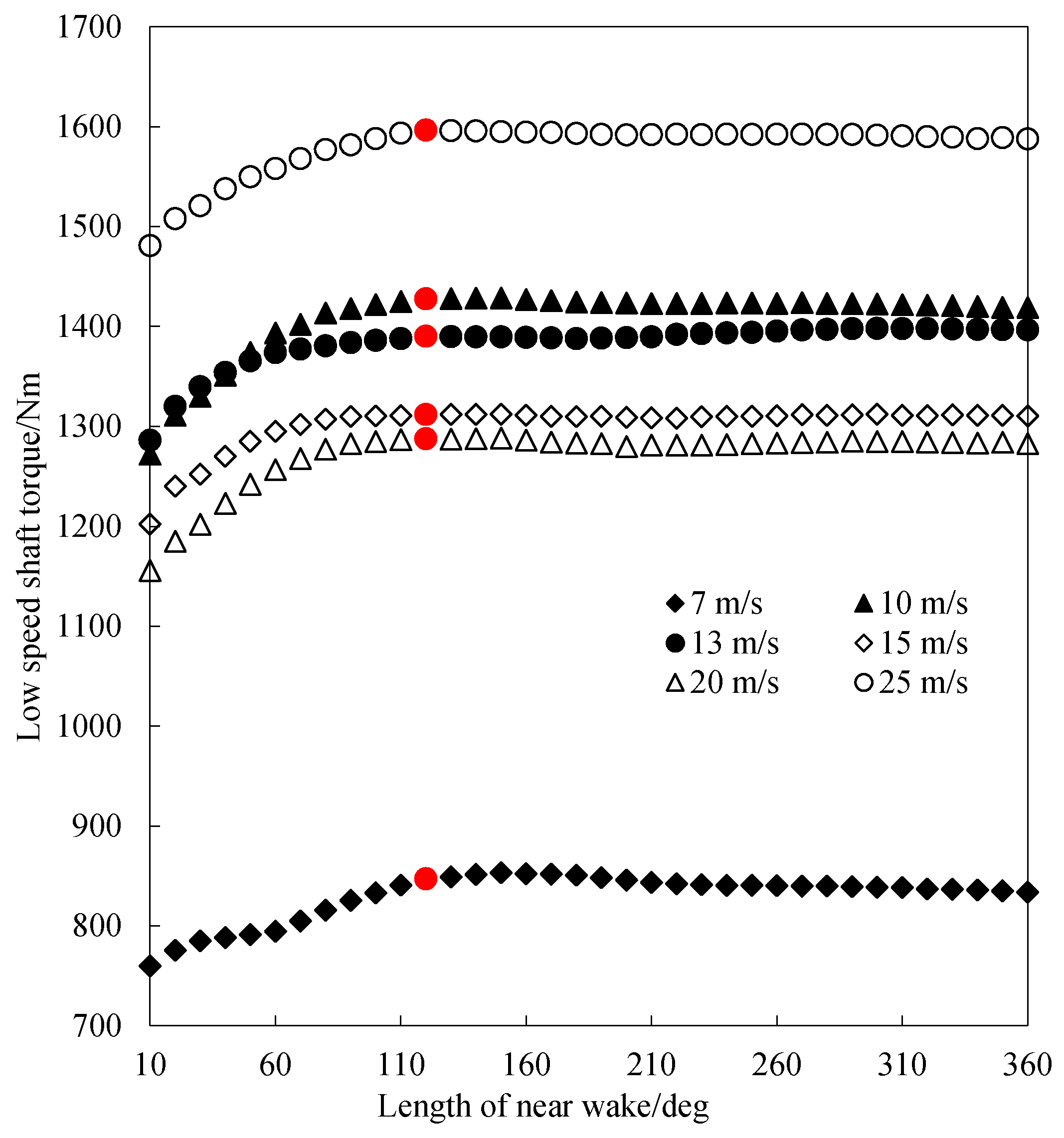
3. Length of Near Wake
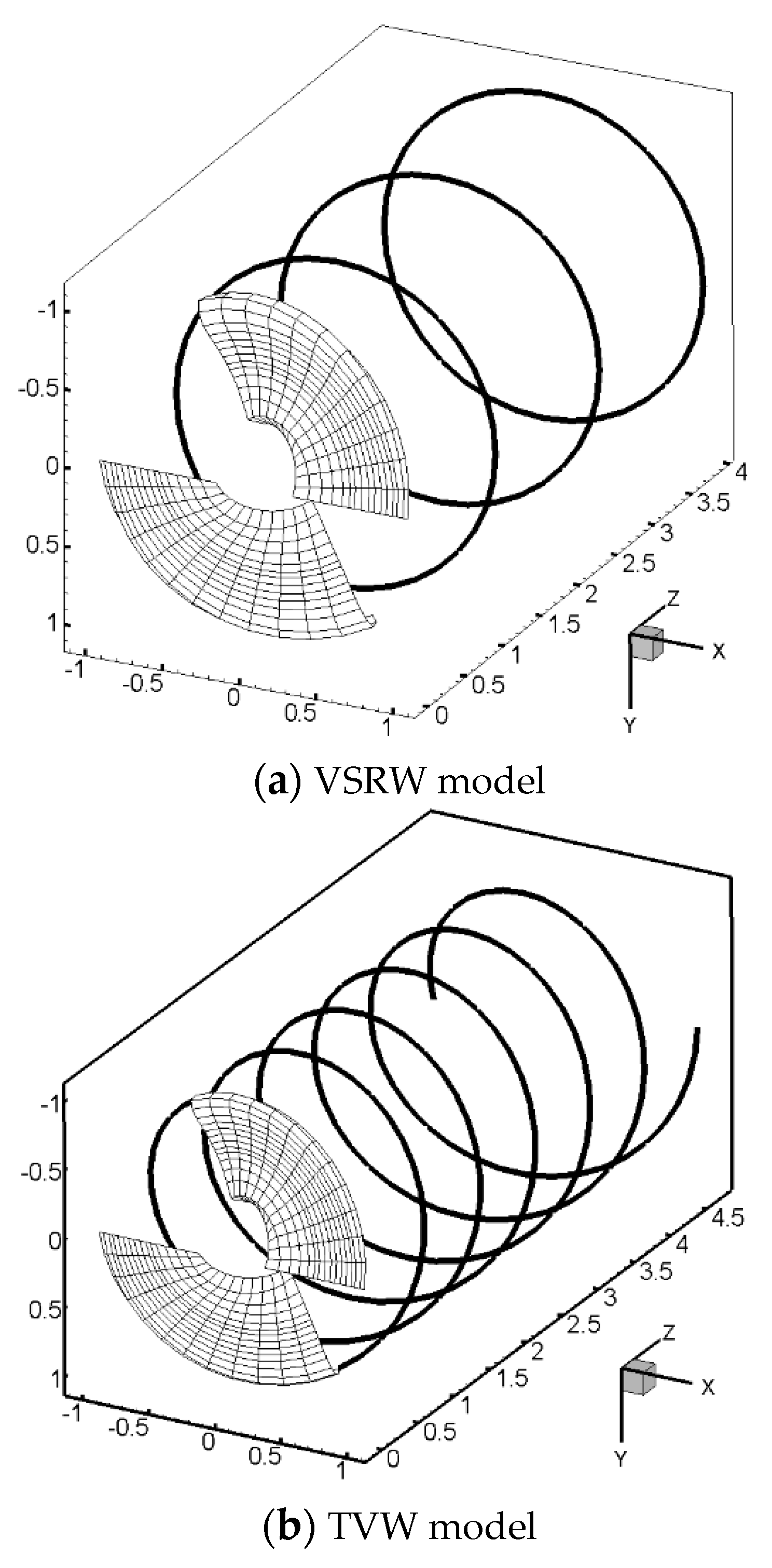
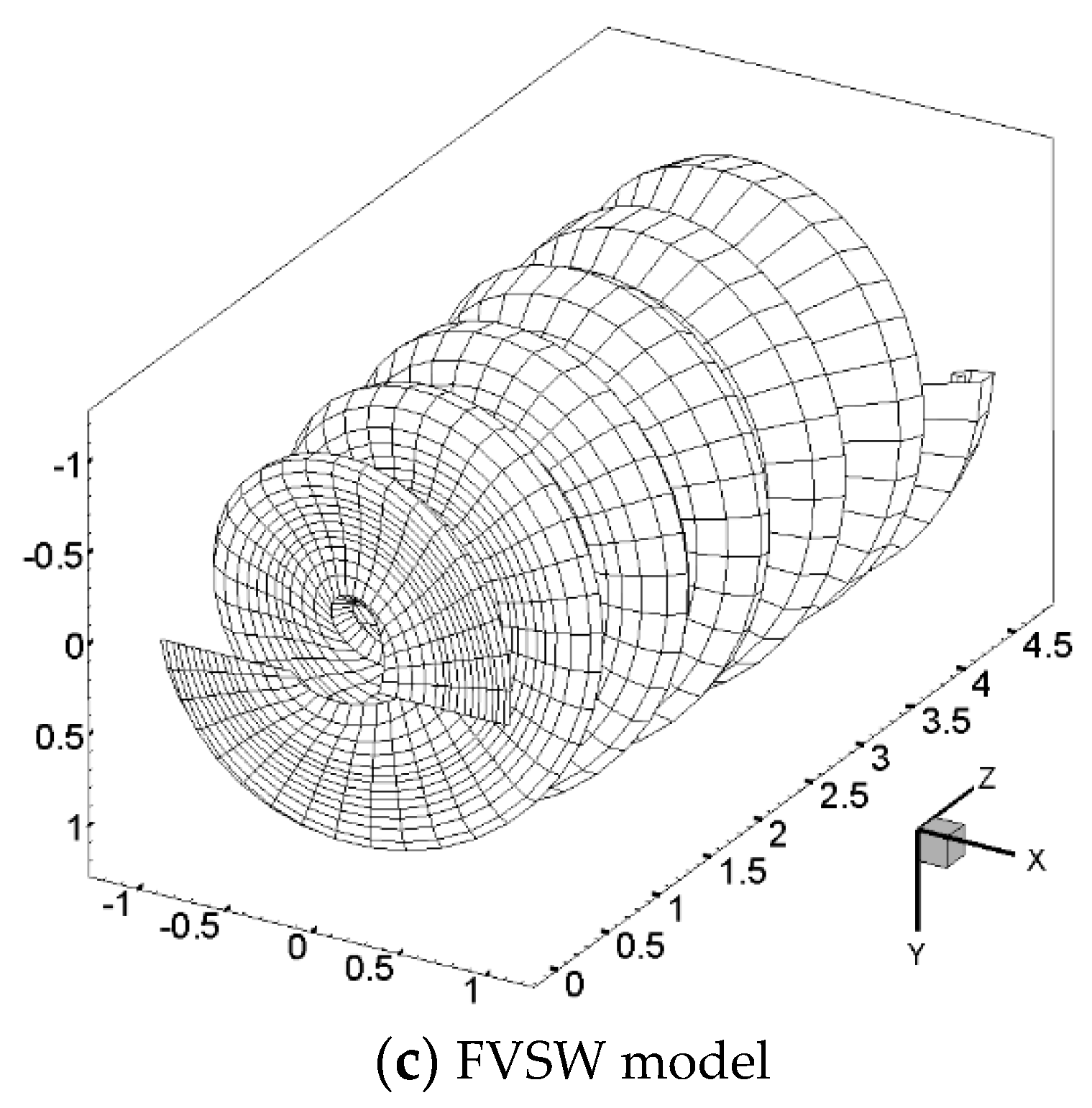
4. Description of TVW and FVSW Models
5. Results and Discussions
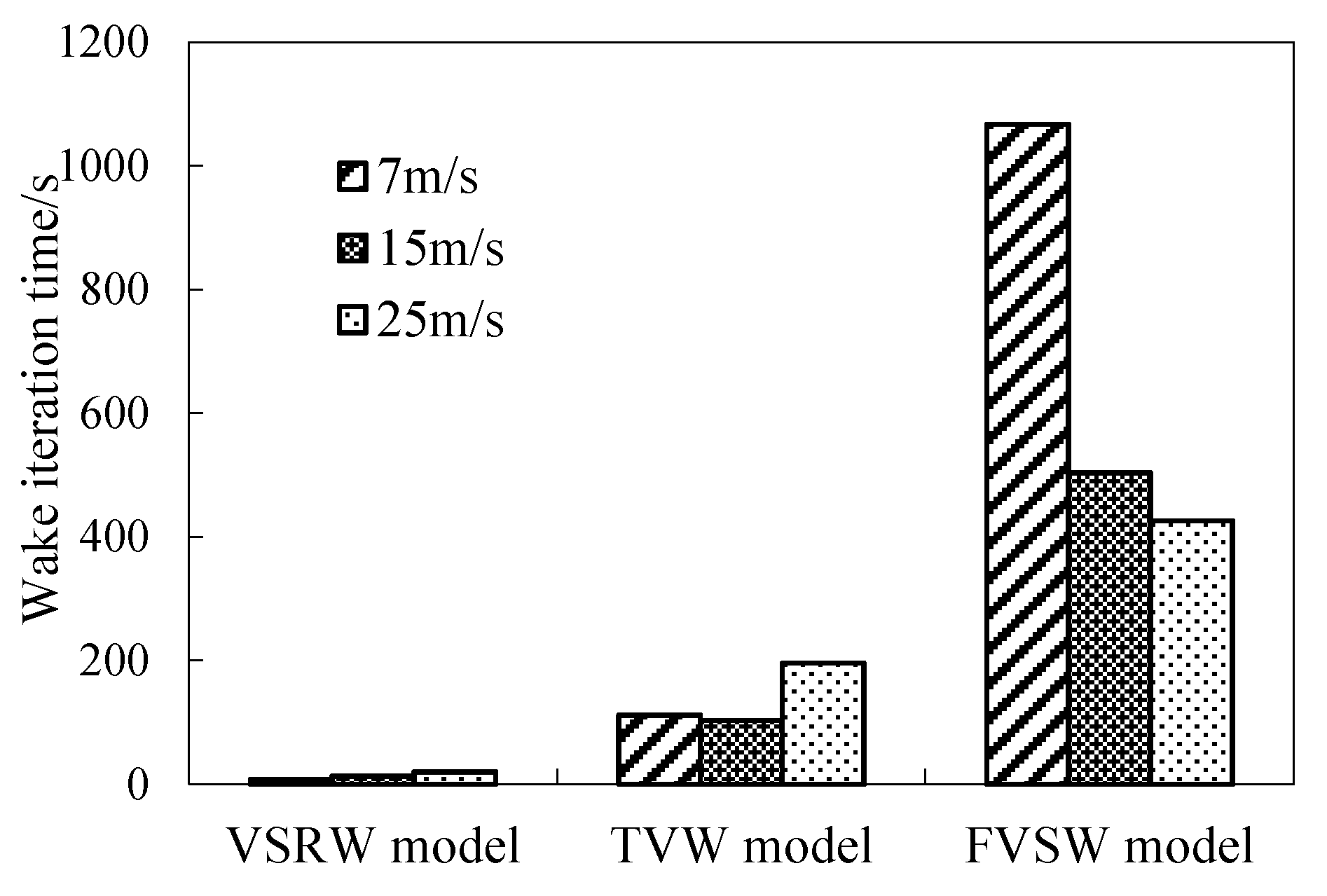
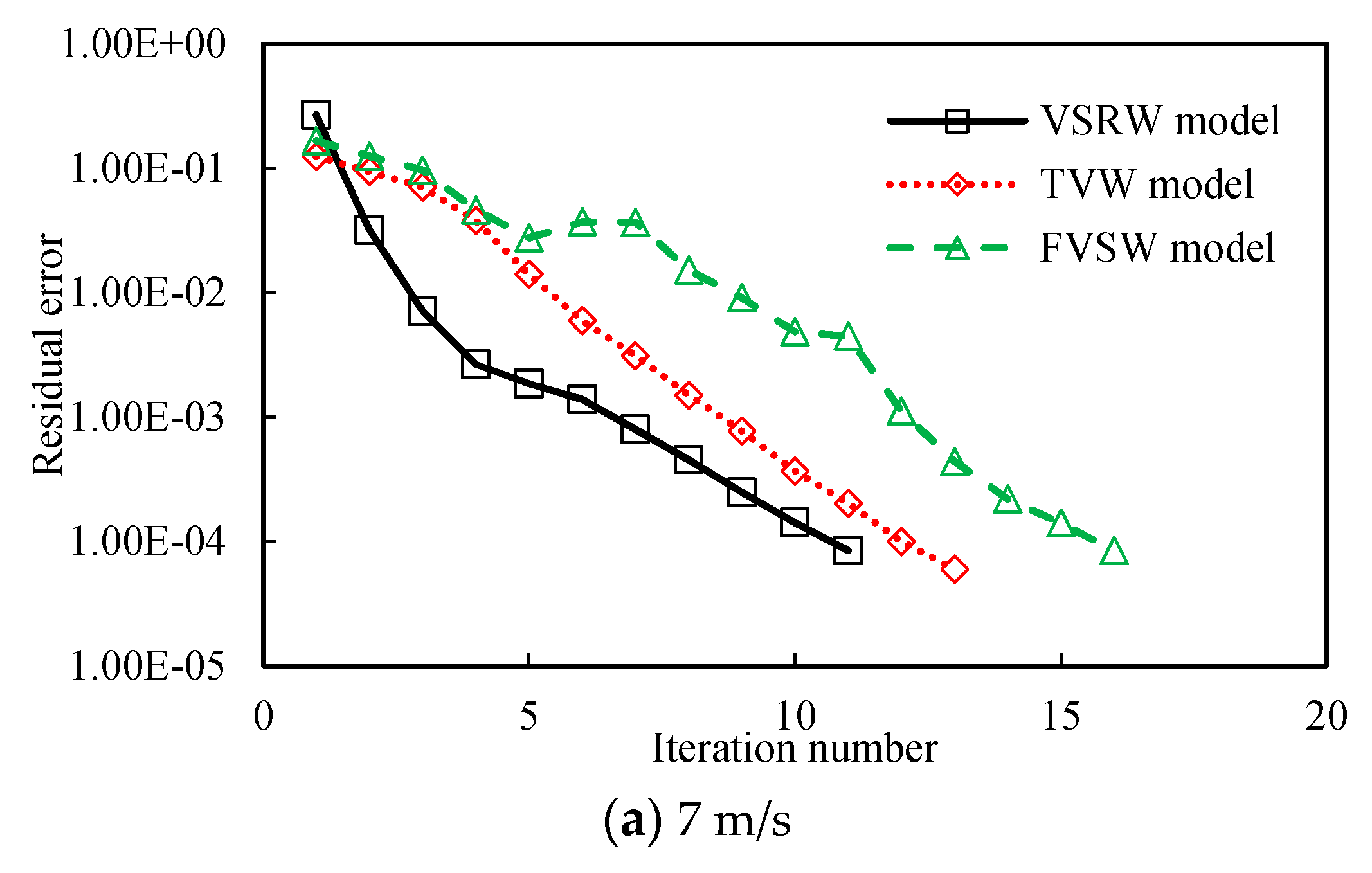
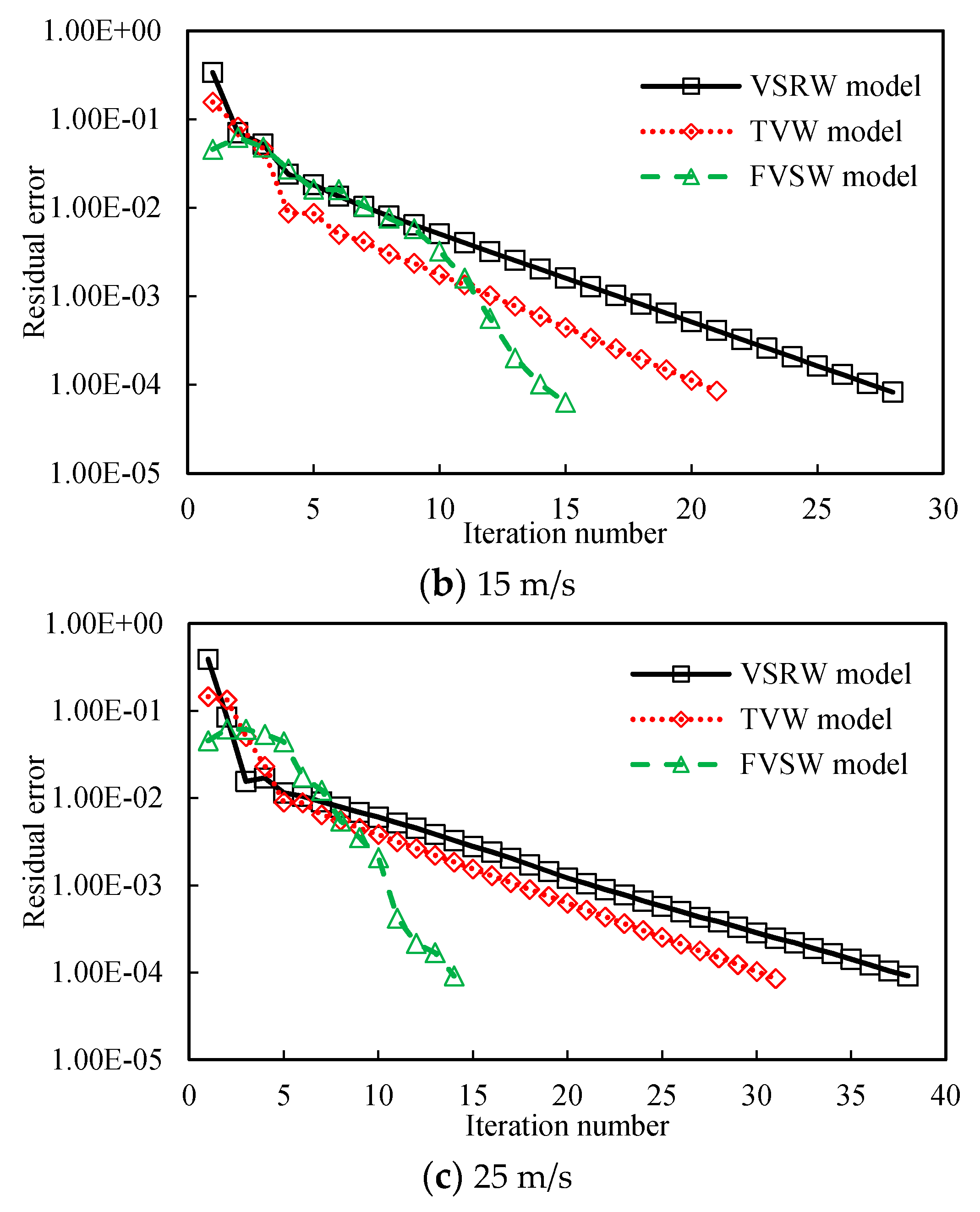
5.1. Wake Iteration
- (1)
- In the VSRW model, the position of the vortex ring is determined by its control point, so we just have to calculate the induced velocity and the position of the control point of the vortex ring in the far wake. However, in the conventional methods, induced velocities and positions of all nodes of the vortex filaments in the far wake need to be calculated.
- (2)
- The analytical method described in Section 2.4.2 is used to calculate the velocity induced by the far wake in the VSRW model. In the conventional methods, the velocity induced by the far wake is the sum of the velocities induced by the straight-line vortex elements, which are calculated using the Biot–Savart law.
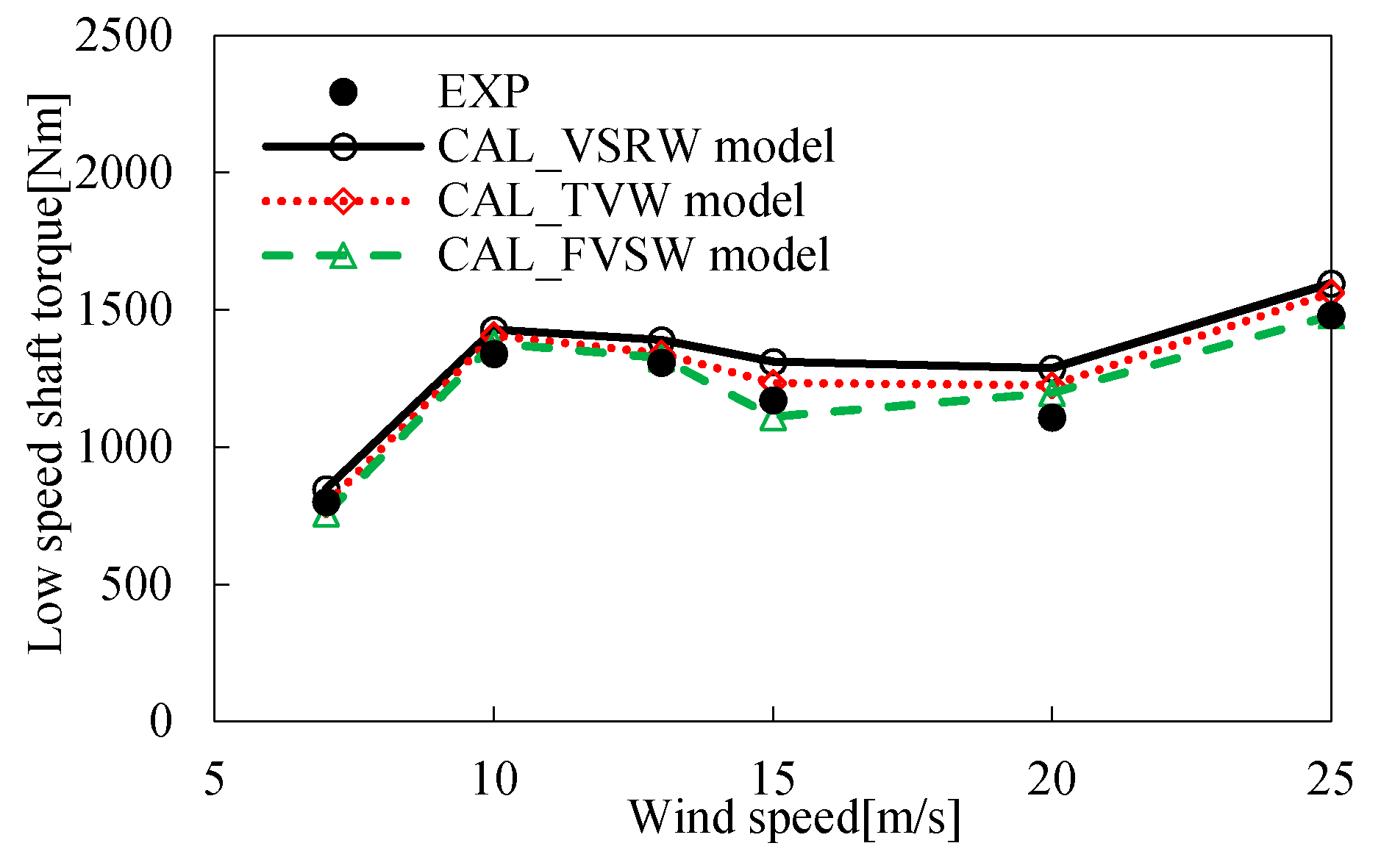
5.2. Low Speed Shaft Torque
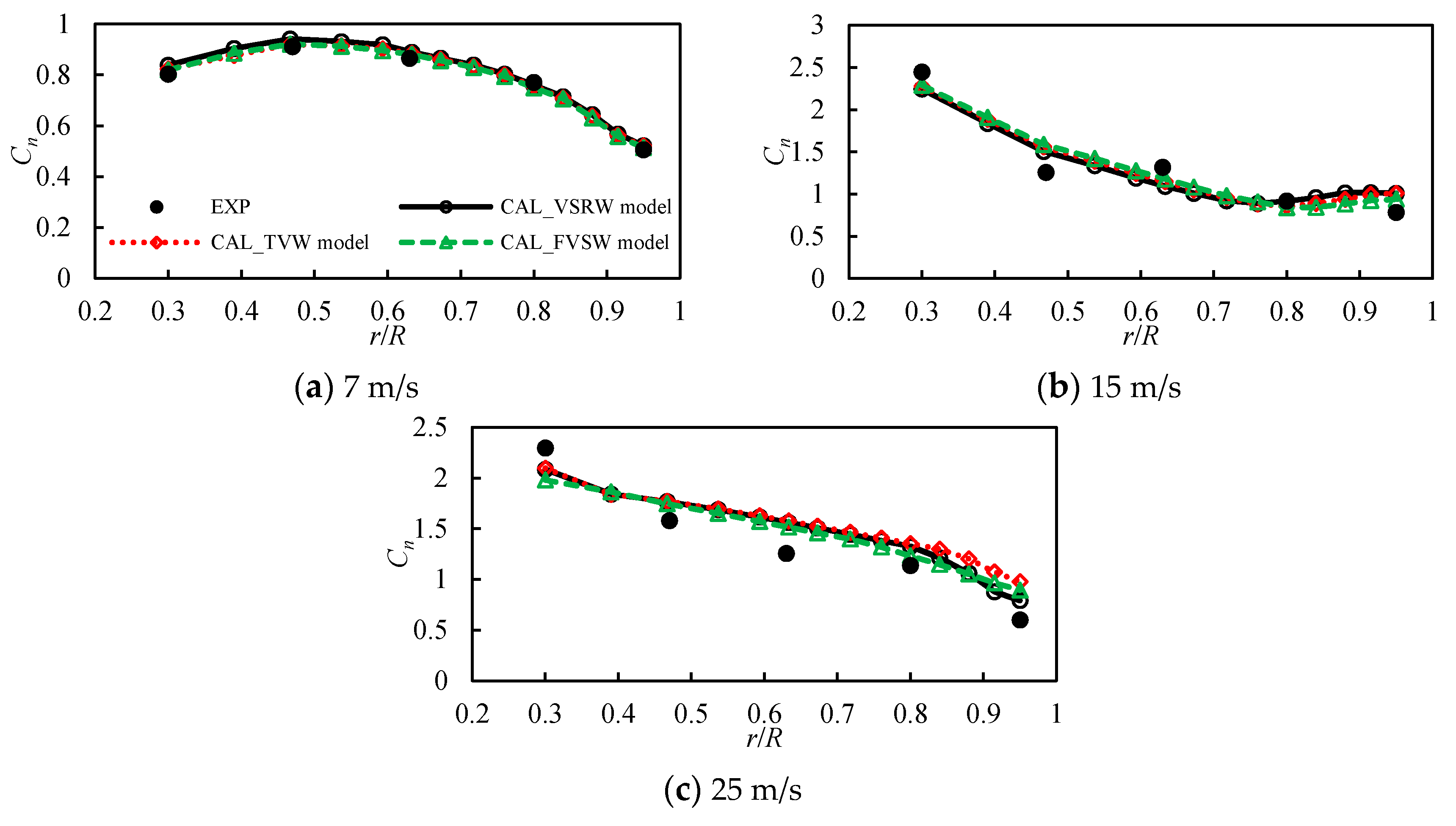
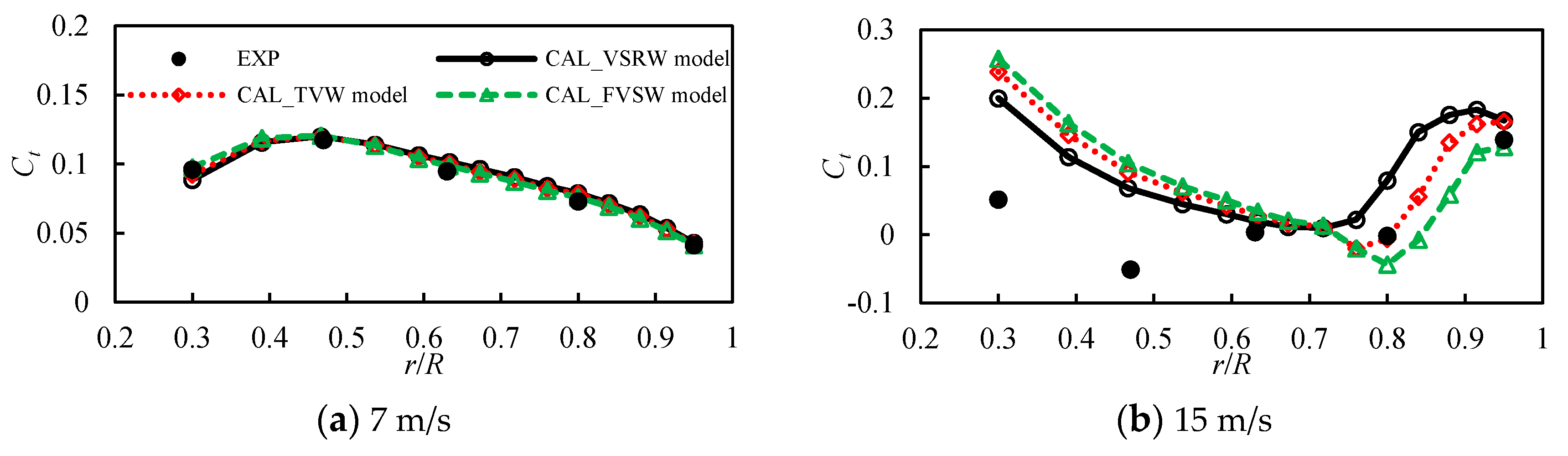
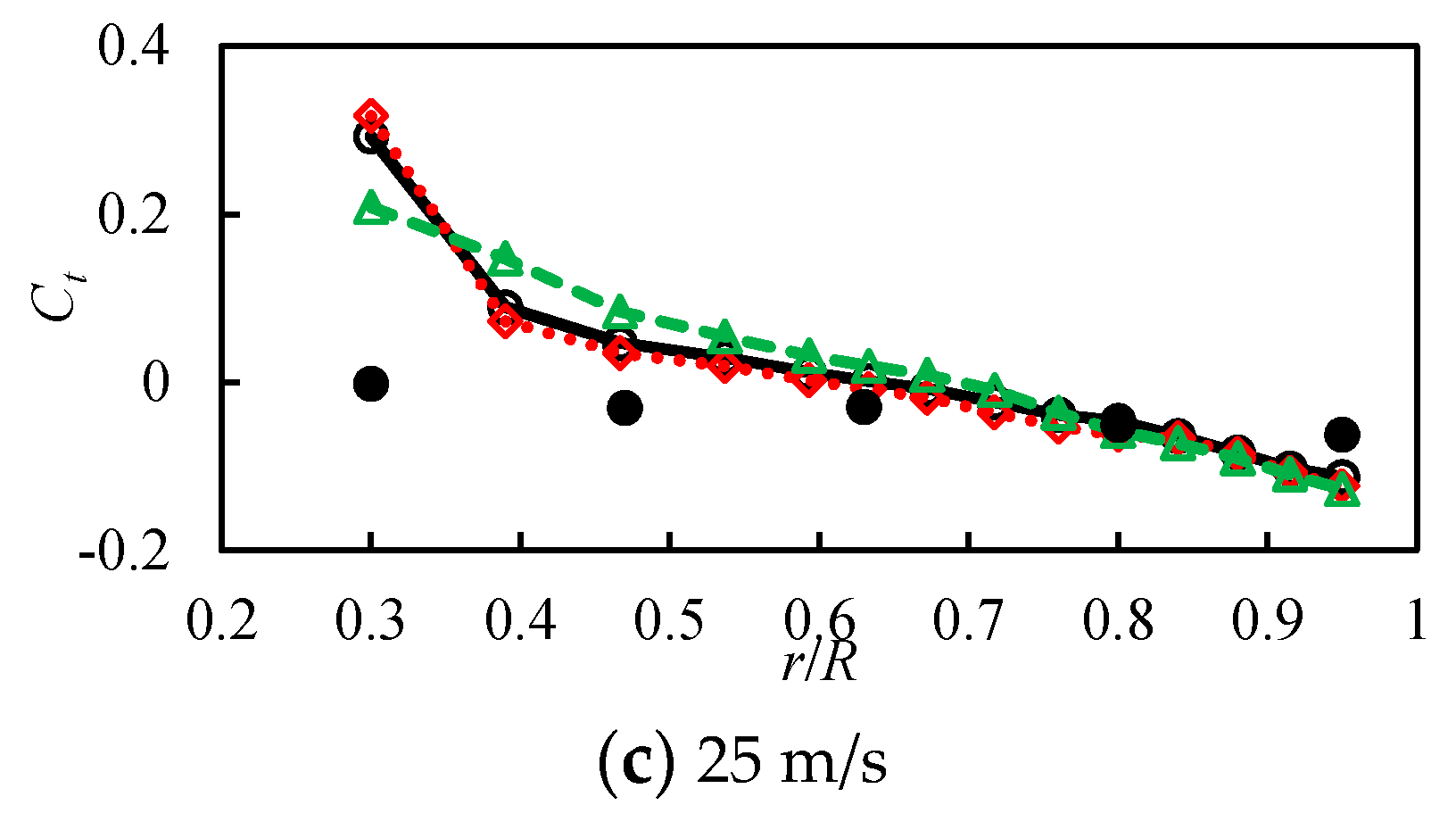
5.3. Radial Distribution of Blade Airloads
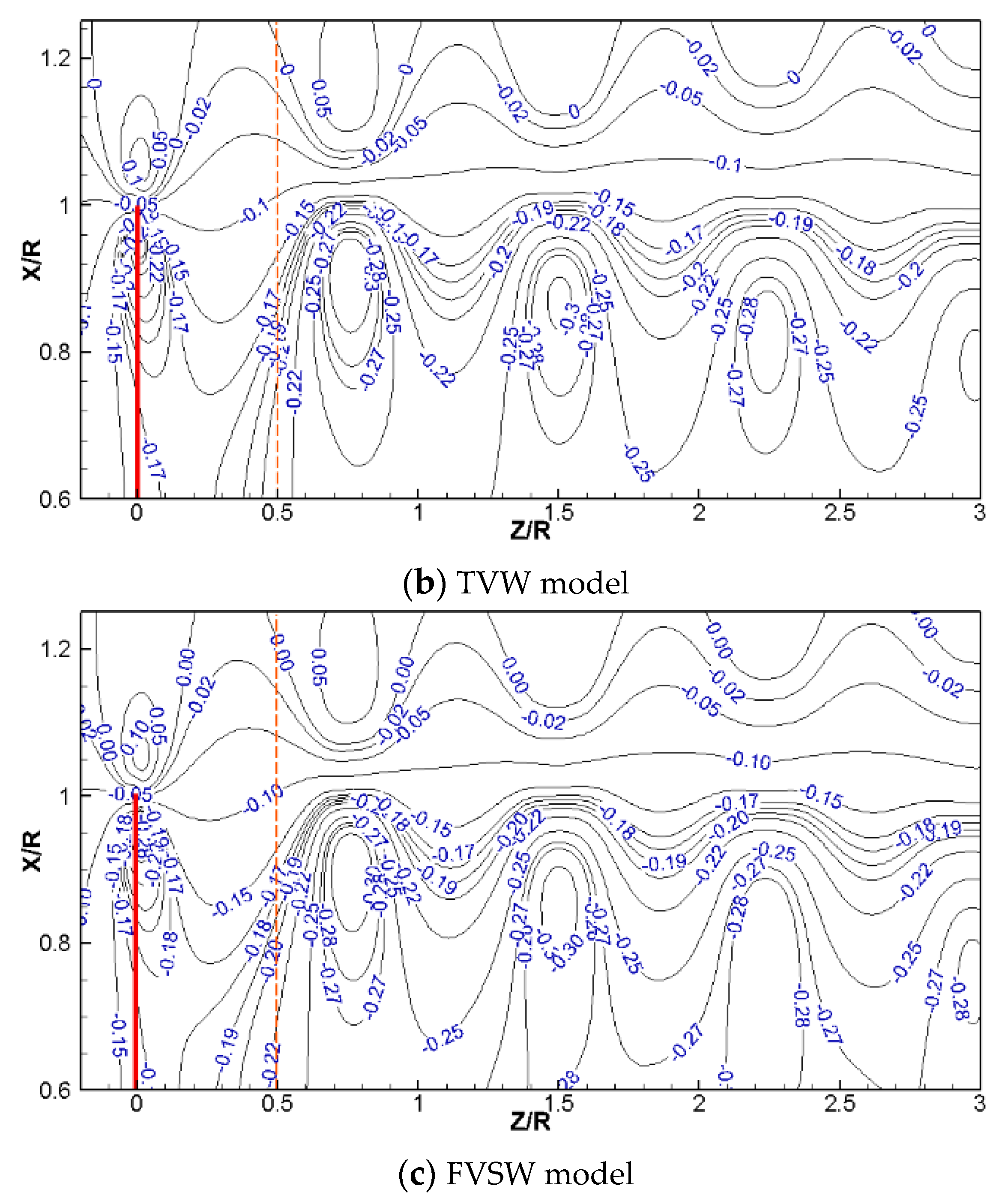
5.4. Wake Geometry
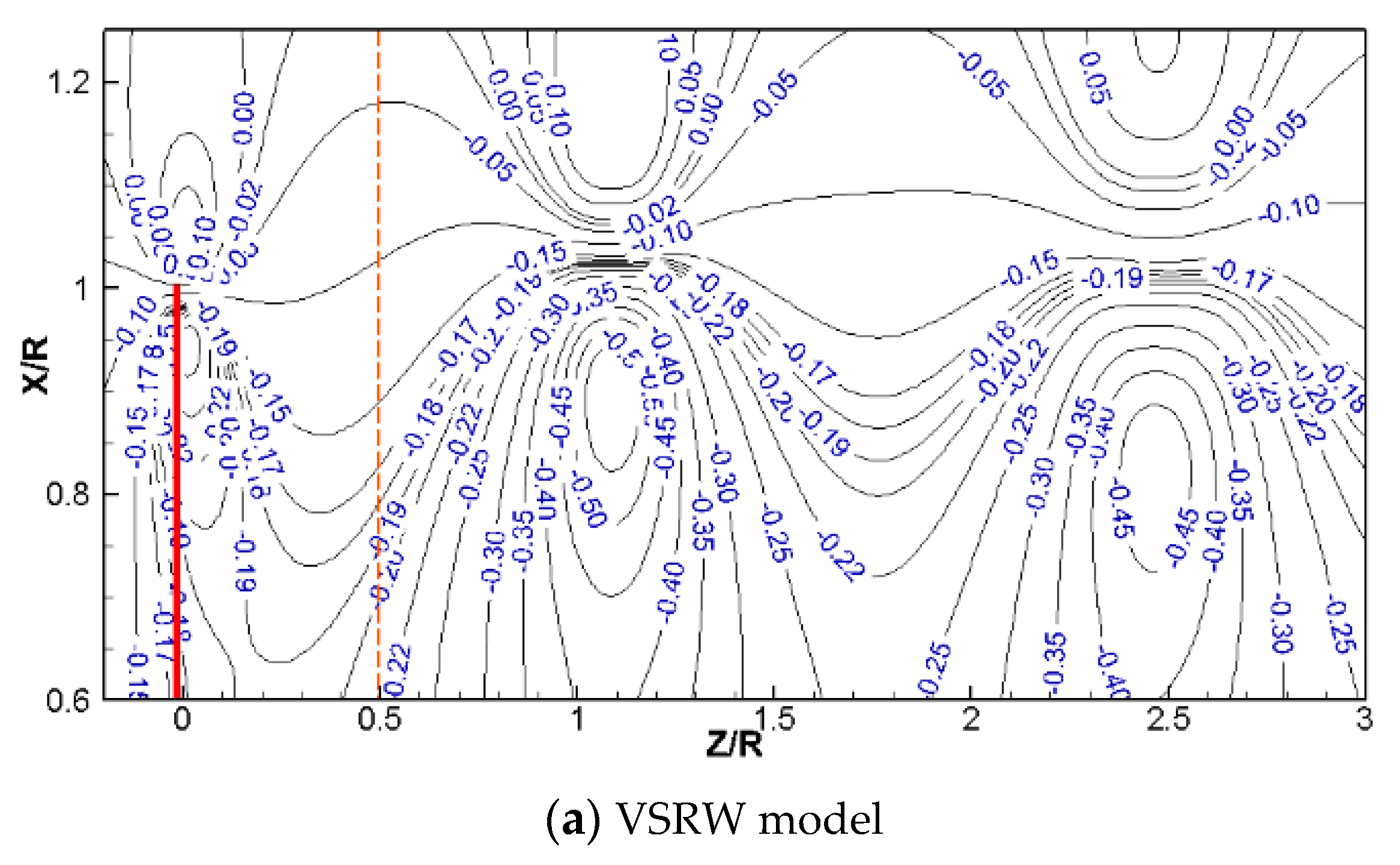
5.5. Induction Factor in the Wake
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| Variables | |
| Coefficients in the induced velocity equation (-) | |
| Chord of the ith blade element (m) | |
| Lift coefficient (-) | |
| Normal force coefficient to the rotor disc (-) | |
| Tangential force coefficients to the rotor disc (-) | |
| Distance from the collocation point to the vortex-line segment (m) | |
| Integer variables (-) | |
| Number of vortex rings (-) | |
| Number of blade elements (-) | |
| Number of time steps of a circle (-), | |
| Radial location of the blade (m) | |
| Rotor tip radius (m) | |
| Dimensionless radial location of the blade element boundary (-) | |
| Radial location of the blade element boundary (m) | |
| Position vector of the vortex collocation point (m) | |
| Position vector from point A to point P (m) | |
| Position vector from point B to point P (m) | |
| Radial position of the nth vortex ring control point (m) | |
| Radial position of the tip vortex release (m) | |
| Radial position of point P (m) | |
| Induced velocity vector (m/s) | |
| Radial velocity at point P induced by the nth vortex ring (m/s) | |
| Axis velocity at point P induced by the nth vortex ring (m/s) | |
| Radial velocity at the nth vortex ring control point induced by all vortex field (m/s) | |
| Radial velocity at point A induced by all vortex field (m/s) | |
| Axis velocity at the nth vortex ring control point induced by all vortex field (m/s) | |
| Axis velocity at point A induced by all vortex fields (m/s) | |
| Free stream velocity vector (m/s) | |
| Resultant velocity at the control point of the ith blade element (m/s) | |
| axis in the coordinate system pointing right as viewed from the front (m) | |
| axis in the coordinate system pointing vertically downwards (m) | |
| axis in the coordinate system in the direction of wind flow (m) | |
| Axis position of the nth vortex ring control point (m) | |
| Axis position of the tip vortex release (m) | |
| Axis position of point P (m) | |
| Vortex circulation (m2/s) | |
| Bound circulation of the blade element (m2/s) | |
| Vortex circulation of the nth vortex ring (m2/s) | |
| Discretization of the azimuthal angle (rad) | |
| Discretization of the wake age angle (rad) | |
| Vortex wake age angle (rad) | |
| Angle between vector and vector AB (rad) | |
| Angle between vector and vector AB (rad) | |
| Azimuthal angle (rad) | |
| Abbreviations | |
| BEM | blade element momentum |
| CFD | computational fluid dynamics |
| CPU | Central Processing Unit |
| FVSW | full vortex sheet wake |
| FVW | free vortex wake |
| GPU | Graphics Processing Unit |
| LSST | low speed shaft torque |
| NASA | National Aeronautics and Space Administration |
| NREL | National Renewable Energy Laboratory |
| RMS | root mean square |
| TVW | tip vortex wake |
| VSRW | vortex sheet and ring wake |
| WInDS | Wake Induced Dynamics Simulator |
References
- Hansen, M.O.L.; Sørensen, J.N.; Voutsinas, S.; Sørensen, N.; Madsen, H.A. State of the art in wind turbine aerodynamics and aeroelasticity. Aerosp. Sci. 2006, 42, 285–330. [Google Scholar] [CrossRef]
- Fernandez-Gamiz, U.; Zulueta, E.; Boyano, A.; Ansoategui, I.; Uriarte, I. Five megawatt wind turbine power output improvements by passive flow control devices. Energies 2017, 10, 742. [Google Scholar] [CrossRef]
- Gohard, J.C. Free Wake Analysis of Wind Turbine Aerodynamics, Wind Energy Conversion, ASRL-TR-184-14; Massachusetts Institute of Technology, Department of Aeronautics and Astronautics, Aeroelastic and Structures Research Laboratory: Cambridge, MA, USA, 1978. [Google Scholar]
- Arsuffi, G.; Guj, G.; Morino, L. Boundary element analysis of unsteady aerodynamics aerodynamics of windmill rotors in the presence of yaw. J. Wind Eng. Ind. Aerodyn. 1993, 45, 153–173. [Google Scholar] [CrossRef]
- Garrel, A.V. Development of a Wind Turbine Aerodynamics Simulation Module; ECN-C-03-079; Energy Research Centre of The Netherlands: Petten, The Netherlands, 2003. [Google Scholar]
- Sant, T.; Kuik, G.V.; Bussel, G. Estimating the Angle of Attack from Blade Pressure Measurements on the NREL Phase VI Rotor Using a Free Wake Vortex Model: Axial Conditions. Wind Energy 2006, 9, 549–577. [Google Scholar] [CrossRef]
- Sebastian, T.; Lackner, M.A. Development of a free vortex wake method code for offshore floating wind turbines. Renew. Energy 2012, 46, 269–275. [Google Scholar] [CrossRef]
- Rosen, A.; Lavie, I.; Seginer, A. A general free-wake efficient analysis of horizontal-axis wind turbines. Wind Eng. 1990, 14, 362–373. [Google Scholar]
- Gupta, S. Development of a Time-Accurate Viscous Lagrangian Vortex Wake Model for Wind Turbine Applications. Ph.D. Dissertation, University of Maryland, College Park, MD, USA, 2006. [Google Scholar]
- Qiu, Y.X.; Wang, X.D.; Kang, S.; Zhao, M.; Liang, J.Y. Predictions of unsteady HAWT aerodynamics in yawing and pitching using the free vortex method. Renew. Energy 2014, 70, 93–105. [Google Scholar] [CrossRef]
- Xu, B.F.; Wang, T.G.; Yuan, Y.; Cao, J.F. Unsteady aerodynamic analysis for offshore floating wind turbines under different wind conditions. Philos. Trans. R. Soc. A 2015, 373, 20140080. [Google Scholar] [CrossRef] [PubMed]
- Marten, D.; Lennie, M.; Pechlivanoglou, G.; Nayeri, C.N.; Paschereit, C.O. Implementation, optimization and validation of a nonlinear lifting line free vortex wake module within the wind turbine simulation. In Proceedings of the ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, Montreal, QC, Canada, 15–19 June 2015. [Google Scholar]
- Miller, R.H. The aerodynamics and dynamic analysis of horizontal axis wind turbines. J. Wind Eng. Ind. Aerodyn. 1983, 15, 329–340. [Google Scholar] [CrossRef]
- Afjeh, A.A.; Keith, T.G.J. A vortex lifting line method for the analysis of horizontal axis wind turbines. ASME J. Sol. Energy Eng. 1986, 108, 303–309. [Google Scholar] [CrossRef]
- Yu, W.; Ferreira, C.S.; van Kuik, G.; Baldacchino, D. Verifying the blade element momentum method in unsteady, radially varied, axisymmetric loading using a vortex ring model. Wind Energy 2017, 20, 269–288. [Google Scholar] [CrossRef]
- Farrugia, R.; Sant, T.; Micallef, D. Investigating the aerodynamic performance of a model offshore floating wind turbine. Renew. Energy 2014, 70, 24–30. [Google Scholar] [CrossRef]
- Elgammi, M.; Sant, T. Combining unsteady blade pressure measurements and a free-wake vortex model to investigate the cycle-to-cycle variations in wind turbine aerodynamic blade loads in yaw. Energies 2016, 9, 460. [Google Scholar] [CrossRef]
- Turkal, M.; Novikov, Y.; Usenmez, S.; Sezer-Uzol, N.; Uzol, O. GPU based fast free-wake calculations for multiple horizontal zxis wind turbine rotors. J. Phys. Conf. Ser. 2014, 524, 012100. [Google Scholar] [CrossRef]
- Weissinger, J. The Lift Distribution of Swept-Back Wings; NACA-TM-1120; National Advisory Committee for Aeronautics: Cleveland, OH, USA, 1947. [Google Scholar]
- Du, Z.; Selig, M.S. A 3-D Stall-Delay Model for Horizontal Axis Wind Turbine Performance Prediction; AIAA-98–0021; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1998. [Google Scholar]
- Bagai, A.; Leishman, J.G. Rotor free-wake modeling using a relaxation technique—Including comparisons with experimental data. J. Am. Helicopter Soc. 1995, 40, 29–41. [Google Scholar] [CrossRef]
- Bhagwat, M.; Leishman, J.G. Stability, consistency and convergence of time marching free-vortex rotor wake algorithms. J. Am. Helicopter Soc. 2001, 46, 59–71. [Google Scholar] [CrossRef]
- Grouse, G.L.; Leishman, J.G. A new method for improved rotor free vortex convergence. In Proceedings of the 31st AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 11–14 January 1993. [Google Scholar]
- Wang, T.G.; Wang, L.; Zhong, W.; Xu, B.F.; Chen, L. Large-scale wind turbine blade design and aerodynamic analysis. Chin. Sci. Bull. 2012, 57, 466–472. [Google Scholar] [CrossRef]
- Gupta, S.; Leishman, J.G. Accuracy of the induced velocity from helicoidal vortices using straight-line segmentation. AIAA J. 2005, 43, 29–40. [Google Scholar] [CrossRef]
- Vatistas, G.H.; Kozel, V.; Minh, W. A simpler model for concentrated vortices. Exp. Fluids 1991, 11, 73–76. [Google Scholar] [CrossRef]
- Sant, T.; del Campo, V.; Micallef, D.; Ferreira, C.S. Evaluation of the lifting line vortex model approximation for estimating the local blade flow fields in horizontal-axis wind turbines. J. Renew. Sustain. Energy 2016, 8, 023302. [Google Scholar] [CrossRef]
- Gupta, S.; Leishman, J.G. Validation of a free vortex wake model for wind turbine in yawed flow. In Proceedings of the 44th AIAA Aerospace Sciences Meeting 2006, Reno, NV, USA, 9–12 January 2006; Volume 7, pp. 4529–4543. [Google Scholar]
- Xu, B.F.; Yuan, Y.; Wang, T.G.; Zhao, Z.Z. Comparison of two vortex models of wind turbines using a free vortex wake scheme. J. Phys. Conf. Ser. 2016, 753, 022059. [Google Scholar] [CrossRef]
- Xu, B.F.; Feng, J.H.; Wang, T.G.; Yuan, Y.; Zhao, Z. Application of a turbulent vortex core model in the free vortex wake scheme to predict wind turbine aerodynamics. J. Renew. Sustain. Energy 2018, 10, 023303. [Google Scholar] [CrossRef]
- Bhagwat, M.J.; Leishman, J.G. Correlation of helicopter tip vortex measurements. AIAA J. 2000, 38, 301–308. [Google Scholar] [CrossRef]
- Ananthan, S.; Leishman, J.G. The role of filament stretching in the free-vortex modeling of rotor wakes. J. Am. Helicopter Soc. 2004, 49, 176–191. [Google Scholar] [CrossRef]
- Yoon, S.S. Heister, S.D. Analytical formulas for the velocity field induced by an infinitely thin vortex ring. Int. J. Numer. Methods Fluids 2004, 44, 665–672. [Google Scholar] [CrossRef]
- Fukushima, T. Fast computation of complete elliptic integrals and Jacobian elliptic functions. Celest. Mech. Dyn. Astron. 2009, 105, 305–328. [Google Scholar] [CrossRef]
- Hand, M.M.; Simms, D.A.; Fingersh, L.J.; Jager, D.W.; Cotrell, J.R.; Schreck, S.; Larwood, S.M. Unsteady Aerodynamics Experiment Phase VI: Wind Tunnel Test Configurations and Available Data Campaign; NREL/TP-500-29955; National Renewable Energy Laboratory: Golden, CO, USA, 2001.
- Ananthan, S. Analysis of Rotor Wake Aerodynamics during Maneuvering Flight Using a Free-Vortex Wake Methodology. Ph.D. Dissertation, University of Maryland, College Park, MD, USA, 2006. [Google Scholar]
- Breton, S.P.; Coton, F.N.; Moe, G. A study on rotational effects and different stall delay models using a prescribed wake vortex scheme and NREL Phase VI experiment data. Wind Energy 2008, 11, 459–482. [Google Scholar] [CrossRef]



















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Wang, T.; Yuan, Y.; Zhao, Z.; Liu, H. A Simplified Free Vortex Wake Model of Wind Turbines for Axial Steady Conditions. Appl. Sci. 2018, 8, 866. https://doi.org/10.3390/app8060866
Xu B, Wang T, Yuan Y, Zhao Z, Liu H. A Simplified Free Vortex Wake Model of Wind Turbines for Axial Steady Conditions. Applied Sciences. 2018; 8(6):866. https://doi.org/10.3390/app8060866
Chicago/Turabian StyleXu, Bofeng, Tongguang Wang, Yue Yuan, Zhenzhou Zhao, and Haoming Liu. 2018. "A Simplified Free Vortex Wake Model of Wind Turbines for Axial Steady Conditions" Applied Sciences 8, no. 6: 866. https://doi.org/10.3390/app8060866
APA StyleXu, B., Wang, T., Yuan, Y., Zhao, Z., & Liu, H. (2018). A Simplified Free Vortex Wake Model of Wind Turbines for Axial Steady Conditions. Applied Sciences, 8(6), 866. https://doi.org/10.3390/app8060866