1. Introduction
Automated guided vehicles can be used in any scenario with prominent material flows. Applications of Automated Guided Vehicles (AGVs) exist in all fields of industry and trade. Typical examples are the use in assembly lines, warehouses, order picking systems and production plants [
1]. The main motivation of the presented research is the still relatively low application rate of AGVs. In theory, AGVs dispose of several advantages compared to other kinds of logistics equipment. They are more flexible, modular and intelligent, use less field area and require little time and cost for initial installation [
2]. However, until today, AGVs have not yet been applied in many potential applications [
3]. Additionally, frequently, even if AGVs are already applied, their possible potential in terms of flexibility and efficiency is not yet exploited because they are only used for rather mundane tasks such as good loading and unloading and only fixed guiding technology such as magnetic guidance or optical guidance are used [
2]. One main problem can be the hardware design [
2]. AGVs with conventional steering systems such as classical Ackermann steering exhibit limited maneuvering capability and can thus not use the movement areas efficiently. Another main problem is the high cost of sensors in AGVs and the fact that sensor data filtering, sensor data plausibility assessment and sensor fusion are no trivial tasks. In real AGV operation, some parameters such as slip, exact wheel diameter and mass are changed during the operation caused by uneven load distribution or manufacturing imperfection and loading of goods [
4]. These conditions aggravate the gathering of reliable sensor data. Further problems can arise from a less than sufficient flexibility, availability and reliability of current AGV designs. The main objective of the presented research is to develop approaches for optimized virtual sensor design and, through this, to more efficient, flexible and reliable AGVs. The presented research combines two main approaches to address these causes: the innovative AGV design, which is described in this paper, allows unlimited maneuvering capabilities and the virtual diagnostic sensor design enhances reliable sensor information without additional expenditures.
2. Research Thesis and Structure
In recent years, a considerable amount of research is centered on Fault-Tolerant Control (FTC) systems, which can be envisioned to maintain control objectives even if a fault occurs. The application of such system is frequently hindered by a lack of reliable sensors and the high cost of sensors [
5,
6,
7]. Therefore, virtual sensors are applied, which make use of mathematical models of the process and other available measurements to estimate the unmeasured variables [
8,
9]. Many approaches have been reported to design virtual diagnostic sensors: for instance, observer-based [
10,
11], Kalman filter-based [
12,
13] and parameter identification-based [
14] approaches.
At the center of the research is an innovative approach to virtual sensor design of longitudinal forces as well as torques acting onto an AGV using a Quadratic Boundedness (QB) approach [
15]. This approach allows for including bounded disturbances acting on the AGV and avoids unnecessary state estimation because the state is fully available via measurements. One main advantage of the innovative approach is that the application of sophisticated tire models is not necessary. Frequently, the application of these kinds of models limits the performance of the approaches presented in the literature [
16,
17]. Another main advantage of the proposed approach is that the design procedure is expressed in the form of Linear Matrix inequalities (LMIs), which can be solved using widely available computational packages.
Consequently, the central research thesis can be stated as follows: is it possible to design reliable virtual sensors for longitudinal forces and torques of automated guided vehicles based on a quadratic boundedness approach?
An innovative design of an AGV, which allows unlimited maneuvering capabilities but requires reliable sensor information is used both for the sake of explanation and validation of the approach.
It should also be pointed out that such kind of problems can be potentially tackled with the so-called direct virtual sensors, which instead of exploiting the identified system dynamics are based strictly on the existing data [
18,
19,
20,
21,
22]. This is, however, beyond the scope of the developments presented in this paper, which are strictly based on an analytical model of the AGV.
The paper is organized as follows.
Section 3 introduces essential preliminaries, which are necessary to undertake the problem being investigated.
Section 4 describes the AGV, which will be used in this work for the sake of explanation and validation.
Section 5 presents the mathematical foundation.
Section 6 proposes a strategy for the design of the virtual diagnostic sensor.
Section 7 presents the results of the application of the proposed strategy to the AGV.
Section 8 shows experimental results, which clearly exhibit the performance of the proposed approach. Finally, the last section concludes the paper.
4. Design and Realization of an Automated Guided Vehicle
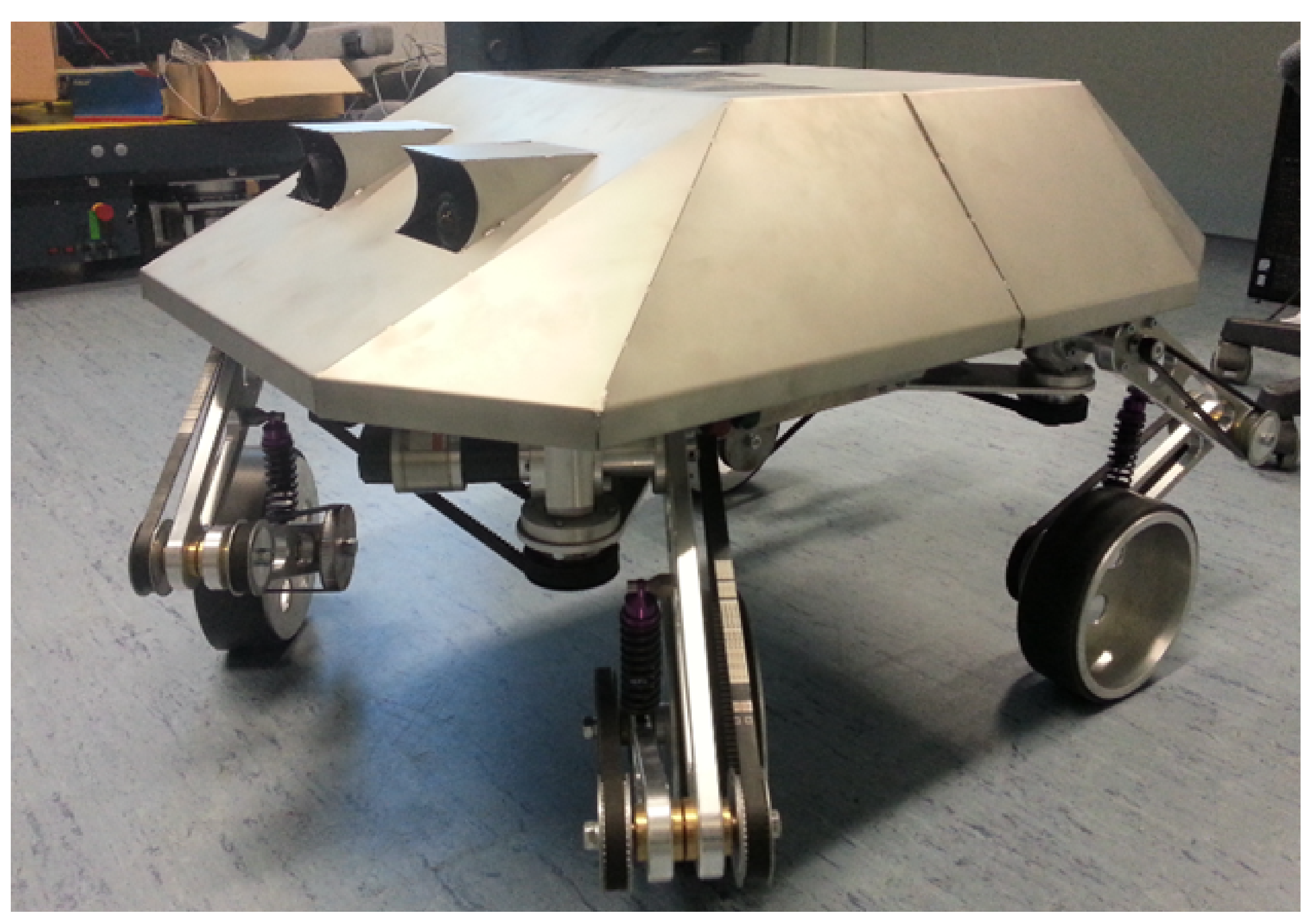
The main objective of the innovative AGV, which was developed at the University of Applied Sciences Ravensburg-Weingarten, was the realization of nearly unlimited maneuvering possibilities with a rather simple mechanical design (
Figure 1).
In earlier work, a production platform with a patented steering principle was developed [
24]. This production platform exhibited very good maneuvering possibilities [
25], but required eight dedicated drive motors and was restricted to flat floors. The innovative design allows driving in uneven environments and only requires four drive motors. The AGV’s main frame consists of four sprung arms that each dispose of one drive motor. The arms can freely rotate, but the front arms and the back arms are connected by belts. Each drive motor disposes of an angle encoder. This allows for determining the angle, the angular velocity and the angular acceleration of each wheel. Another set of two angular encoders measures the steering angle of the front wheels and the back wheels, respectively. The use of four individual motor controllers (electronic position control EPOS—communicating via the CANopen protocol) enables independent use of each drive motor. The ability to use four independent motors leads to a steering system that is already registered as a patent and is based on the concept to use the torque differences between wheels to steer the axles of a vehicle. The AGV can drive directly in any direction without time- and space-consuming turning maneuvers and is able to turn around its own center. Especially in narrow spaces that are common in production settings, this characteristic is very desirable. Still, the mechanical construction is rather simple, because no dedicated steering motors are necessary. This leads to a high robustness. Apart from the six angular sensors mentioned above, the robot is equipped with global acceleration, velocity and yaw rate sensors, whose measurements are available via the Bluetooth protocol.
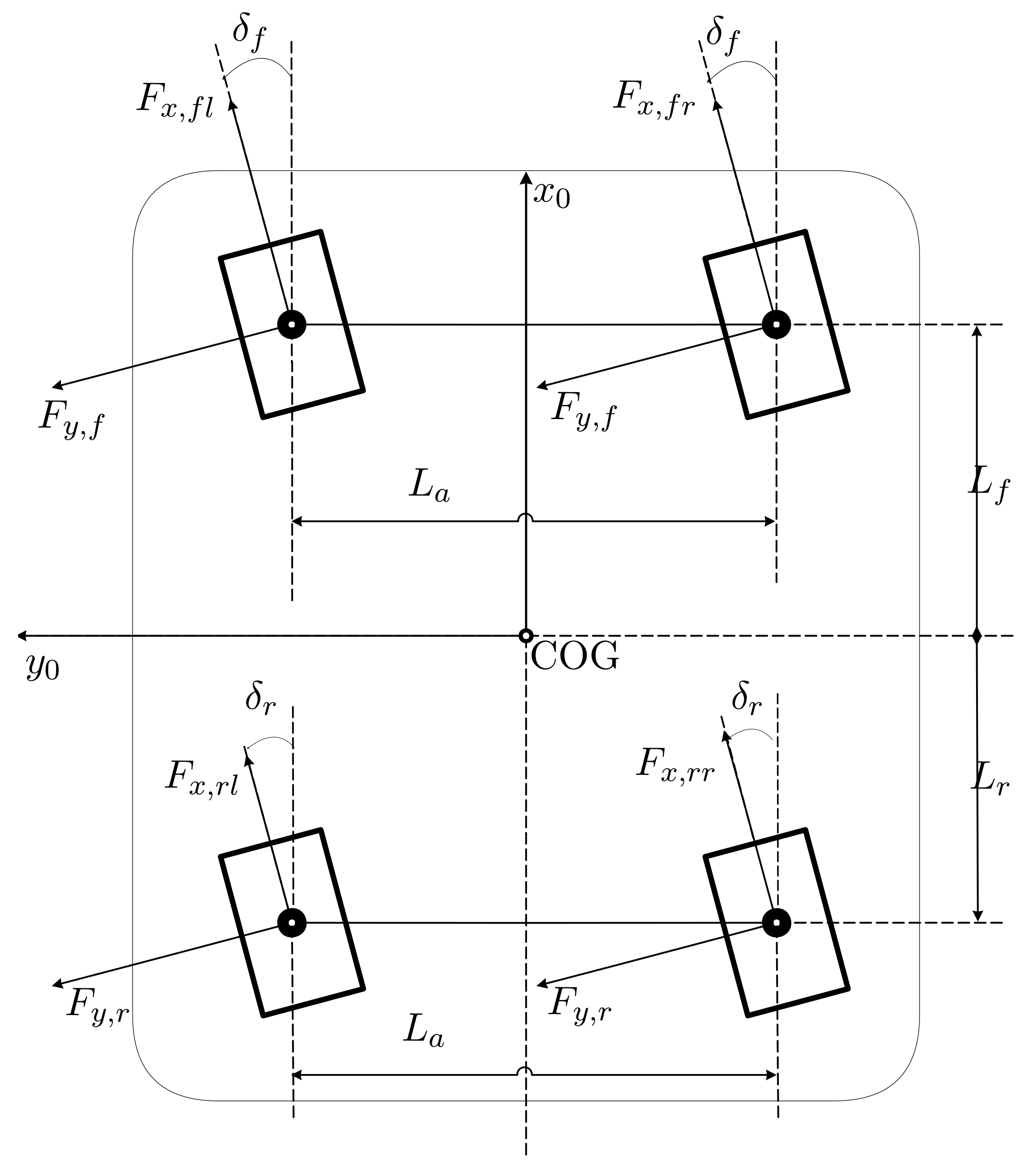
Figure 2 shows the main parameters of the steering system of the AGV with all the considered forces and the parameters are additionally listed in
Table 1.
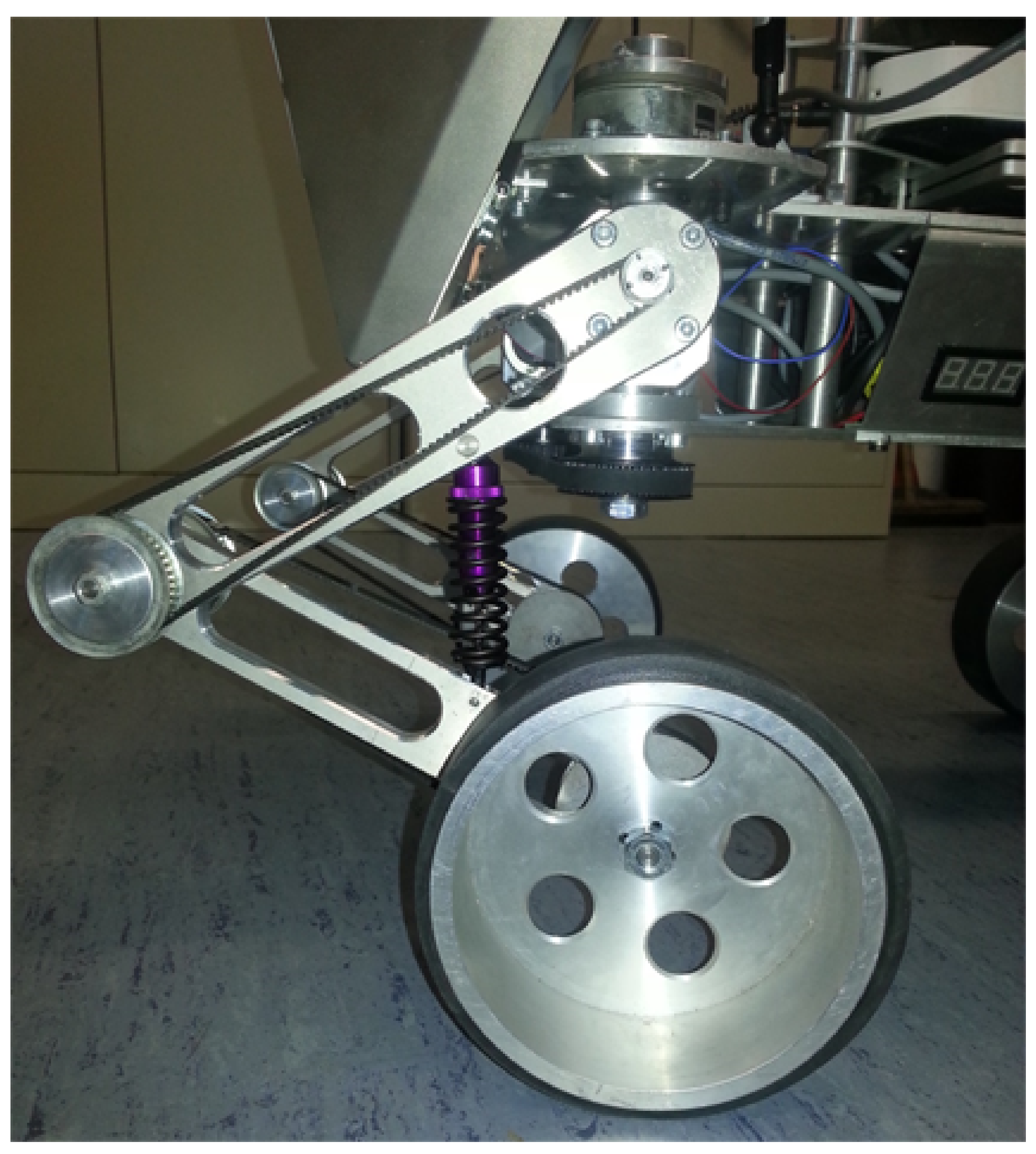
Each arm that holds a drive wheel disposes of a spring suspension intended to absorb impacts from uneven terrain and to balance possible different heights of the terrain (
Figure 3).
For controlling the AGV different modes can be chosen: manual driving and an autonomous driving mode. A central control unit (PC ALIX) determines the required steering angles for the front and the back wheels and sends (different) angular velocity commands to the four drive motors in order to achieve the desired steering angle, the desired driving direction, the desired instantaneous center of rotation ICR (which is often infinitely far away) and the desired vehicle speed.
5. Mathematical Model of the Automated Guided Vehicle
Before proceeding with the development, let us provide the names of the crucial variables shaping the AGV dynamics, which are given in
Table 2.
From
Figure 2, it can be derived that the force causing longitudinal motion is given by
Analogously, the lateral forces can be analyzed:
where the longitudinal wheel forces obey:
with the torque distribution coefficients
satisfying:
It should also be noticed that
are assumed to be known parameters. Finally, the yaw rate dynamics is given by
Having a mathematical description of AGV, the objective of the subsequent part of this paper is to develop a set of virtual sensors enabling estimation of
,
,
,
and
T based on the available measurement vector:
as well as lateral and longitudinal accelerations
and
and known steering angles
and
being available control variables.
6. Virtual Sensor Design
The proposed virtual sensor design strategy starts with extracting the lateral forces
and
from Equations (
6) and (
12), which yields
where
Bearing in mind the fact that
and then substituting Equations (
14) and (15) into Equation (
5) yield:
where
The state space model of AGV is given by Equations (
7)–(10), (
14) and (15)
where
with
The unknown input, which has to be estimated by the virtual sensor is given by:
Additionally, the system matrices are:
Finally, while all state variables
are measured, the output equation is given by
with
. To facilitate the implementation on an on-board device, the system (
32) was discretized with the sampling time
using the Euler methods, which leads to:
with
where
stands for an exogenous disturbance vector (which includes the discretization error) with a known distribution matrix
, while
,
and
are obtained by substituting
and
into Equations (
36)–(
38), respectively. It should be pointed out that the proposed approach was tested with the Runge–Kutta discretization framework of various orders. However, the results were almost identical as those provided by the Euler method. As a consequence, it was used as the dedicated approach. The reason behind such a situation can be associated with the fact that the discretized system described in Equation (
32) is a linear-time varying one composed of a set of first order differential equations.
For the purpose of further deliberations, it is necessary to underline the fact that all state variables of the system descibed in Equation (
40) are measured. Thus, contrarily to the approaches present in the literature (see, e.g., [
26] and the references therein), the attention is focused on estimating
only. Indeed, as the estimation of the state vector is unnecessary, it will simplify the proposed design procedure. Moreover, as can be deduced from Equation (
38), depending on the steering angles
and
, the matrix
can be either nonsingular or singular. This means that the system described in Equation (
40) can be either a linear time-varying system or a descriptor time-varying linear system (see, e.g., [
27] and the references therein). Contrarily to the Kalman-filter-based approaches to descriptor systems, the system (
40) has an unknown input
, which has to be estimated. Another class of approaches is dedicated to descriptor linear time-varying systems with unknown inputs described within linear-parameter-varying framework (see, e.g., [
28]). Unfortunately, all these approaches inherit one common drawback, which is related to
being a constant matrix
, which is of course a singular one. This is however not the case in system (
40). Thus, to the authors’ knowledge, there is no approach present in the literature, which can be used to settle the problem of estimating
in system (
40). In the light of the above discussion, there is a need for developing a new estimator structure capable of:
Finally, to tackle the virtual sensor design problem, the following novel adaptive estimator structure is proposed:
where
stands for an estimate of
and
is the estimator gain matrix. Substituting system (
40) into Equation (
43) yields:
where
is an unknown input estimation error. While its dynamics is governed by:
where
and
. Finally, Equation (
45) is transformed into a compact form:
with
and
. To make further deliberations tractable, it is assumed that
is bounded within an ellipsoid
This allows formulating the following theorem, which constitutes the main result of this section.
Theorem 1. The system (46) is strictly quadratically bounded for all and all allowable if there exist and , such the following conditions are satisfiedwith . Proof. Using Definition 1 and the fact that
(cf. (
47)), it can be concluded that
where
is the Lyapunov candidate function.
Consequently, using Equation (
46) and defining
it can be shown that
From (
49), it is evident that, for any
Thus, applying the S-procedure to (
50) and (
51) gives
which by implementing the Schur complement yields
Finally, substituting
into (
53) gives (
48), which completes the proof. ☐
In spite of the incontestable appeal of the approach summarized by Theorem 1, it is impossible to use in order to obtain a solution of (
48), which will be feasible for all
. To settle the design problem, the system (
46) is transformed into a Linear Parameter-Varying (LPV) form:
where
with
Thus, Theorem 1, can be reformulated in the following fashion:
Theorem 2. The system (56) is strictly quadratically bounded for all and all allowable if there exist and , the following conditions are satisfied:with . Finally, the design procedure of virtual sensors boils down to:
- Offline:
Select
and obtain the gain matrix
of (
43) by solving (
58) and then substituting
.
- Online:
6.1. Uncertainty Intervals
The main objective of this point is to extend the virtual sensor algorithm proposed in the preceding section by an uncertainty interval quantifying the quality of the achieved estimates. This means that the resulting uncertainty interval will provide the knowledge about
in the following form:
Thus, the objective of the subsequent part of this point is to provide a computational framework capable of calculating
and
. To tackle this problem, the following lemma [
15] can be used:
Lemma 1. If the system (45) is strictly quadratically bounded for all , then exists such thatwhere the sequence is defined Finally, bearing in mind that the estimation error
lies within an ellipsoid (
60), its bounds are shaped by:
This result leads to the final form of the uncertainty intervals:
From (
61), it is evident that
converges to one while its convergence rate depends solely on
, i.e., the closer it is to one, the better is the convergence rate, while, from (
63) and (64), it can be deduced that the steady-state length of the uncertainty interval depends on
, i.e., on its diagonal elements. Thus, a natural measure to be optimized should be
which leads to the following strategy:
under constraints (
58). Finally, to obtain
with possibly small uncertainty intervals,
Step 2 of
Offline phase of the algorithm proposed in the preceding section should incorporate the above optimization task. This can be accomplished with widely available computational packages like, e.g., MATLAB (MathWorks, Natick, MA, USA).
From the above discussion, it is evident that
should be selected in such a way as to achieve a good balance between convergence rate expressed by
and the steady-state size of the confidence interval (
63) and (64), which solely depends on the
. The only way to achieve this goal is to solve (
65) by iteratively changing
. Finally, the achieved list of pairs
can be used to find a desired solution. The last component of the proposed strategy that deserves additional explanation is the selection of the matrix
in (
47) shaping the size of the domain of
. This can be achieved by assuming that
where
(
) shape the maximum force rate of change of
while
corresponds to the maximum torque rate of change. The remaining bounds
correspond to the maximum possible values of external exogenous disturbances
. Using the above strategy, matrix
can be selected as:
6.2. Diagnostic Principles
As it was already mentioned in the introductory part of this paper, the main objective was to develop virtual sensors providing:
Having the above estimates, the primary residual signal is formed:
which is used as a source of knowledge concerning the desired torque distribution within AGV. The remaining set of residuals concerns longitudinal forces. The general idea starts with defining the longitudinal slip ratio, which for all wheels is given by [
17]:
As can be observed in
Figure 1, apart from the fact that the wheels are identical, they consist of a metal rim that is sealed with a thin rubber strip. Moreover, it is assumed that the AGV is operating on a level stiff surface. Thus, without loss of generality, it is possible to assume that
. This leads to the following relation:
Since the actual
of AGV is available, it is possible to use (
71) to calculate desired
. Subsequently, the desired
along with
T are employed to calculate the reference longitudinal forces
using (
7)–(10). Note that both
and
are perceived as fault-free as they are generated solely with the AGV model, while the real AGV is exposed to various faults of mechanical nature as well as unexpected working conditions like sliding surfaces, which are also perceived as faults. As a result, the following set of residuals is formed:
8. Experimental Results and Discussion
Let us start with an
Offline phase of the proposed algorithm, which involves (
65) under constraints eqrefeq:theoremest2. As a result, the optimal gain matrix of the virtual sensor (
43) is:
along with
.
Thus, the remaining objective of this section is to provide experimental results regarding the application of the developed AGV virtual sensors and their application to fault diagnosis according to the principles detailed in
Section 6.2.
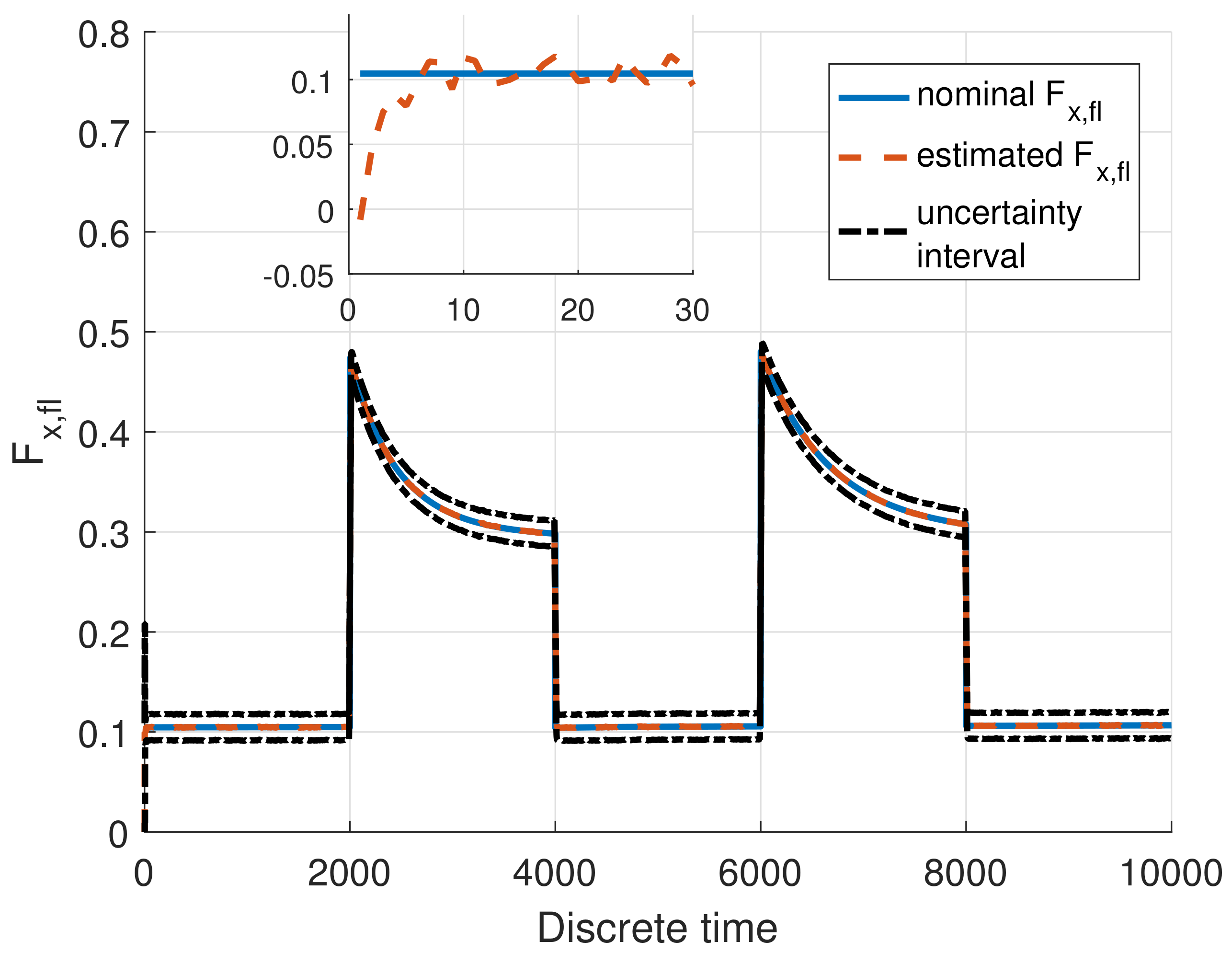
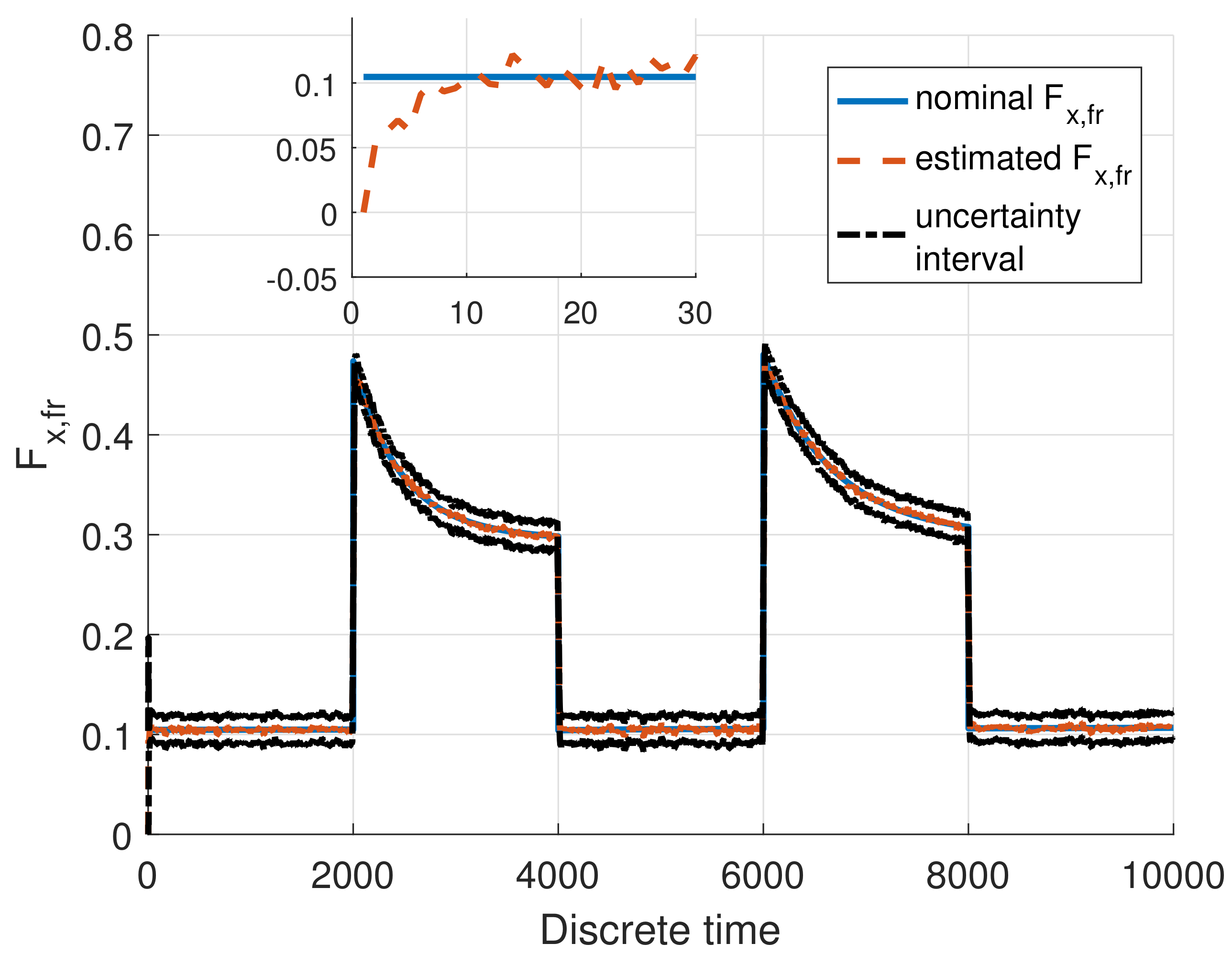
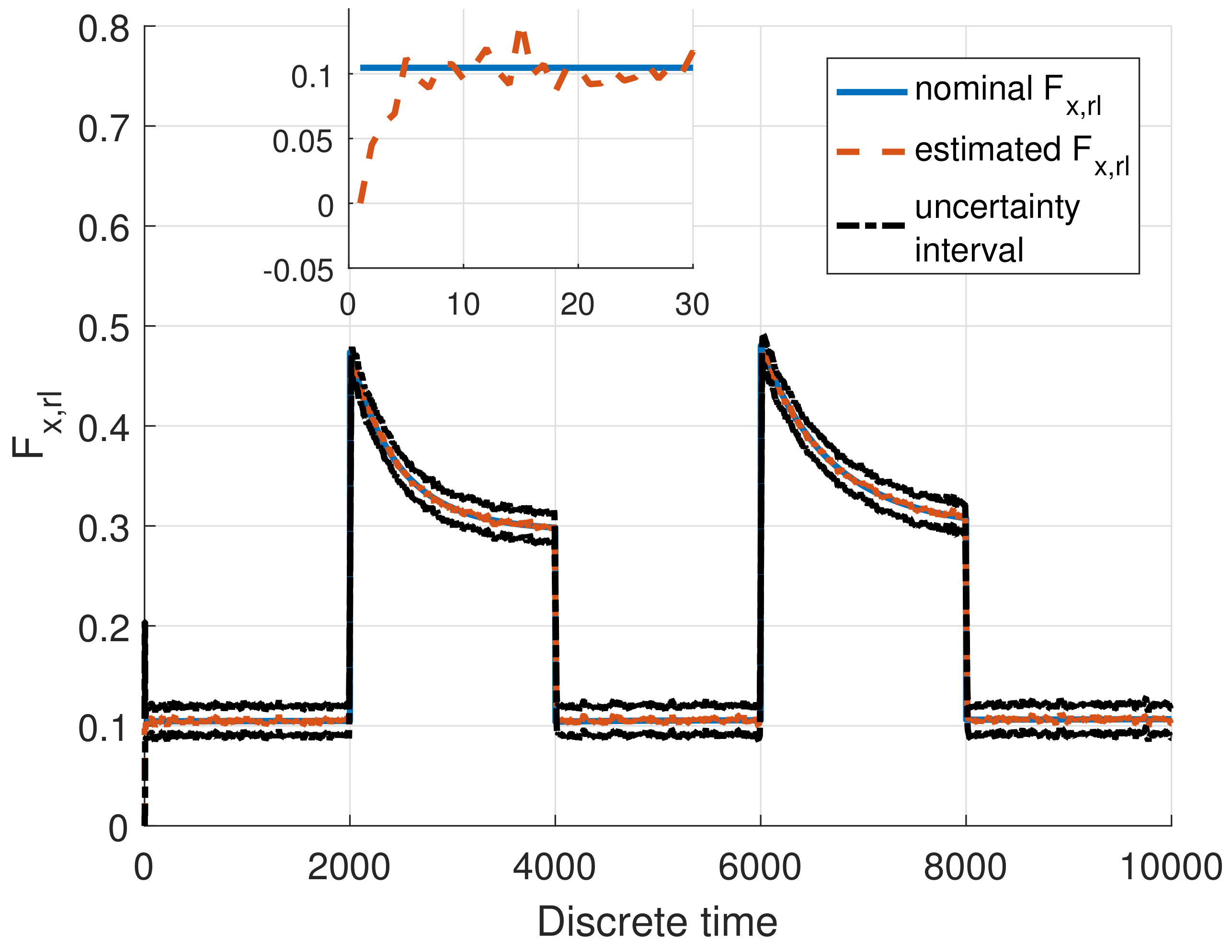
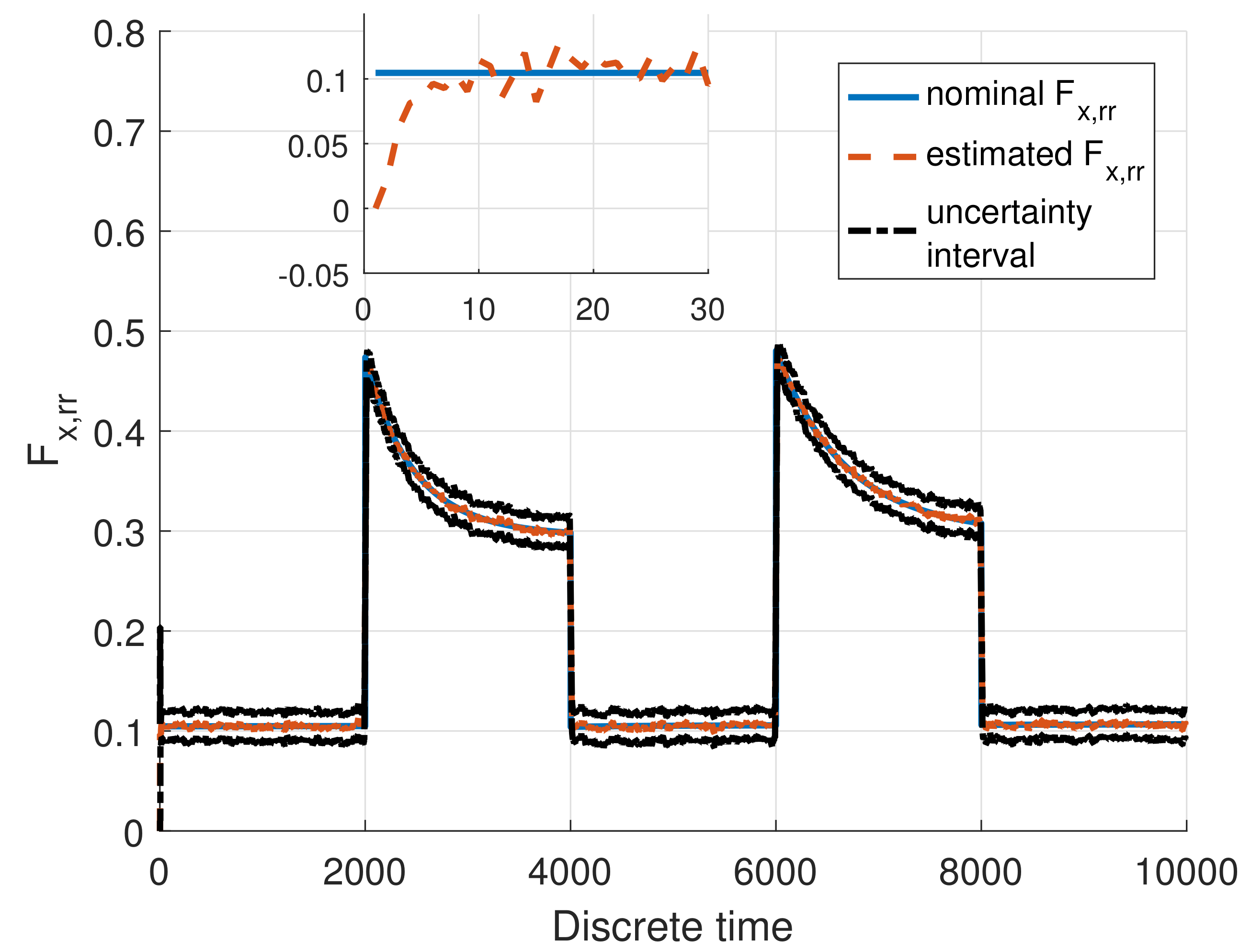
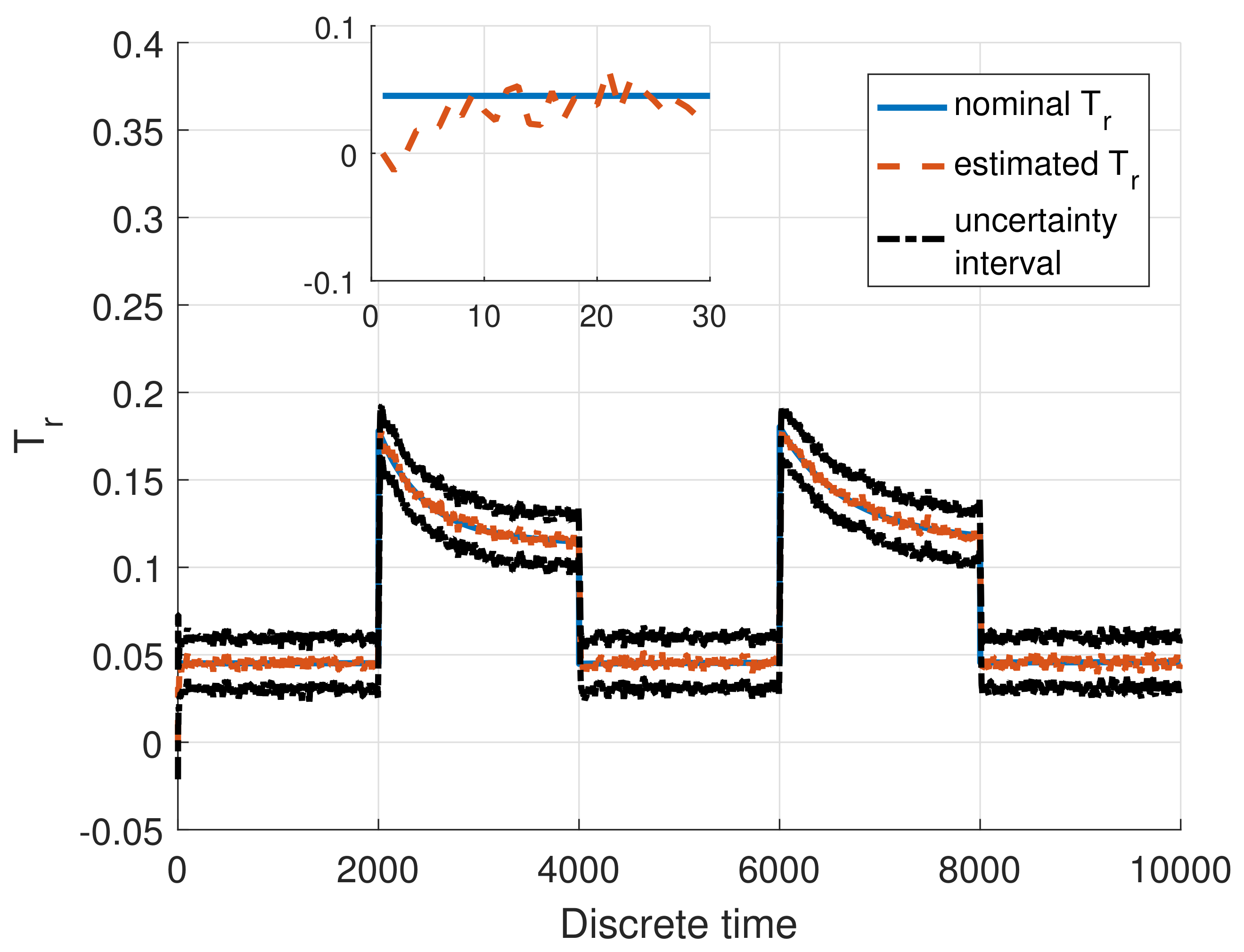
Following the above defined driving scenario,
Figure 4,
Figure 5,
Figure 6 and
Figure 7 present the longitudinal forces calculated with the model (nominal case) and their counterparts obtained with a set of measurements available from the AGV sensors. Note also that the plots show uncertainty intervals calculated according to (
63) and (64). Analogous results are obtained for the torque, which are presented in
Figure 8.
As it was mentioned in
Section 6, the proposed estimation strategy can be also realized with an alternative approach, which employs the descriptor-like form [
28] of the system (
40). For that purpose, it is necessary to use the small angle approximation for which parameter
in (
38) is set to zero. This means that this matrix is constant
and a singular one.
Figure 9 presents a comparison between the nominal force and the descriptor-based one. Note that the results are presented for
; however, a similar effect can be observed for the remaining forces as well as the torque. Indeed, it can be observed that the descriptor-based approach does not perform satisfactorily. Taking into account the results obtained with the proposed approach, it can be concluded that the developed strategy can be perceived as a very good tool for estimating AGV longitudinal forces as well as the torque.
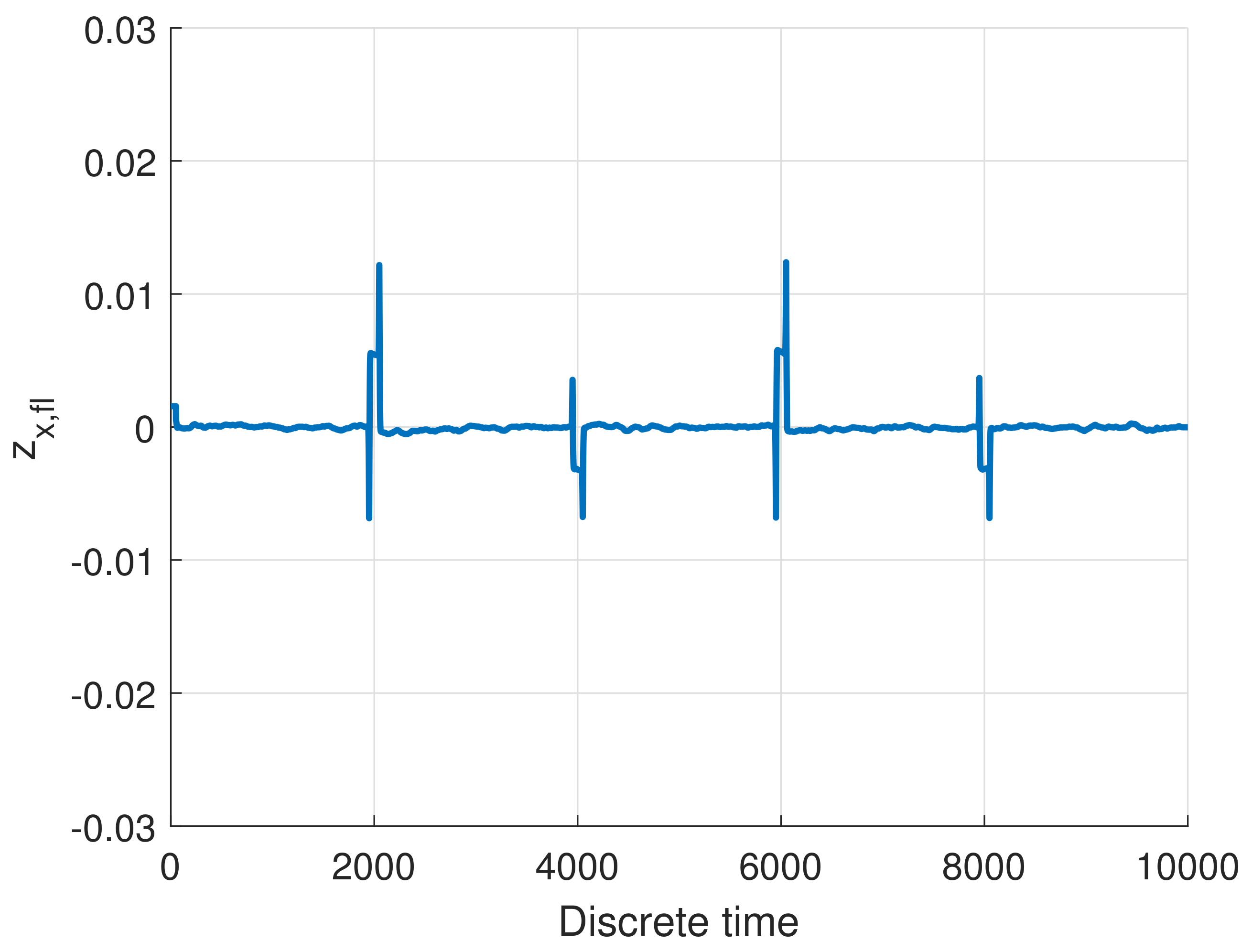
It can be observed that the estimates are consistent with the longitudinal forces and torques obtained by the model and the forces are equally distributed among the wheels. Indeed,
Figure 10 presents the residual
, which clearly indicates that it is close to zero for the fault-free case except for some transient phases corresponding to fast changes in the steering angle. As can be seen in
Figure 10, the residual centers nicely close to zero, clearly indicating the fault-free, nominal case. The same situation occurs for the remaining wheels as well as the torque, which are omitted.
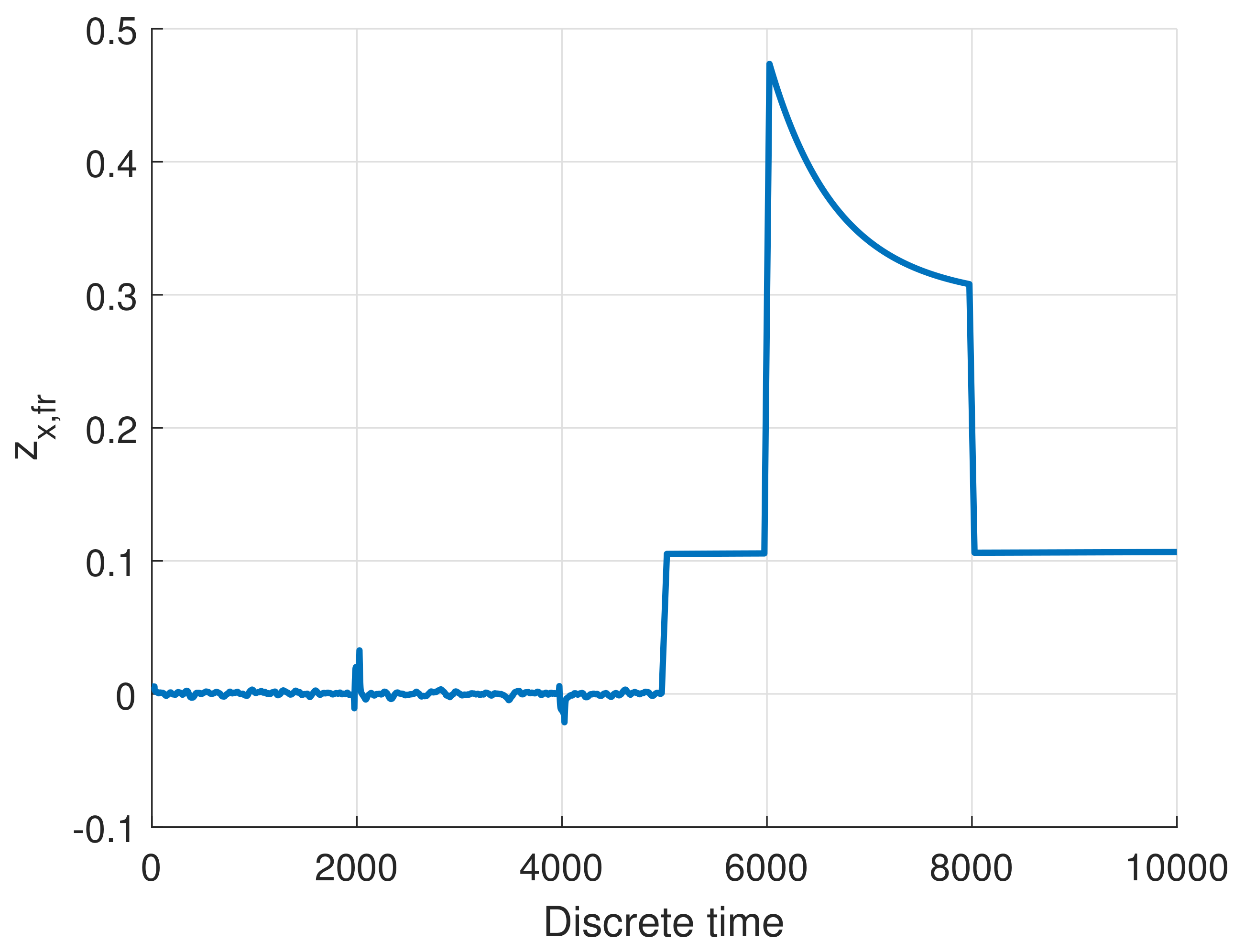
If the virtual sensors operate properly in the fault-free case, then their performance can be evaluated in the fault case. For that purpose, the AGV was steered to two overlapping surfaces in a manner that one of the wheels was hanging in the air. In particular, the front right wheel had no contact with the surface, and, hence, it did not generate the longitudinal force appropriately. This unappealing phenomenon was immediately indicated by residual
which is shown in
Figure 11.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}