Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning

 ,
,  , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
2. 3D Reference Model-TLS Survey
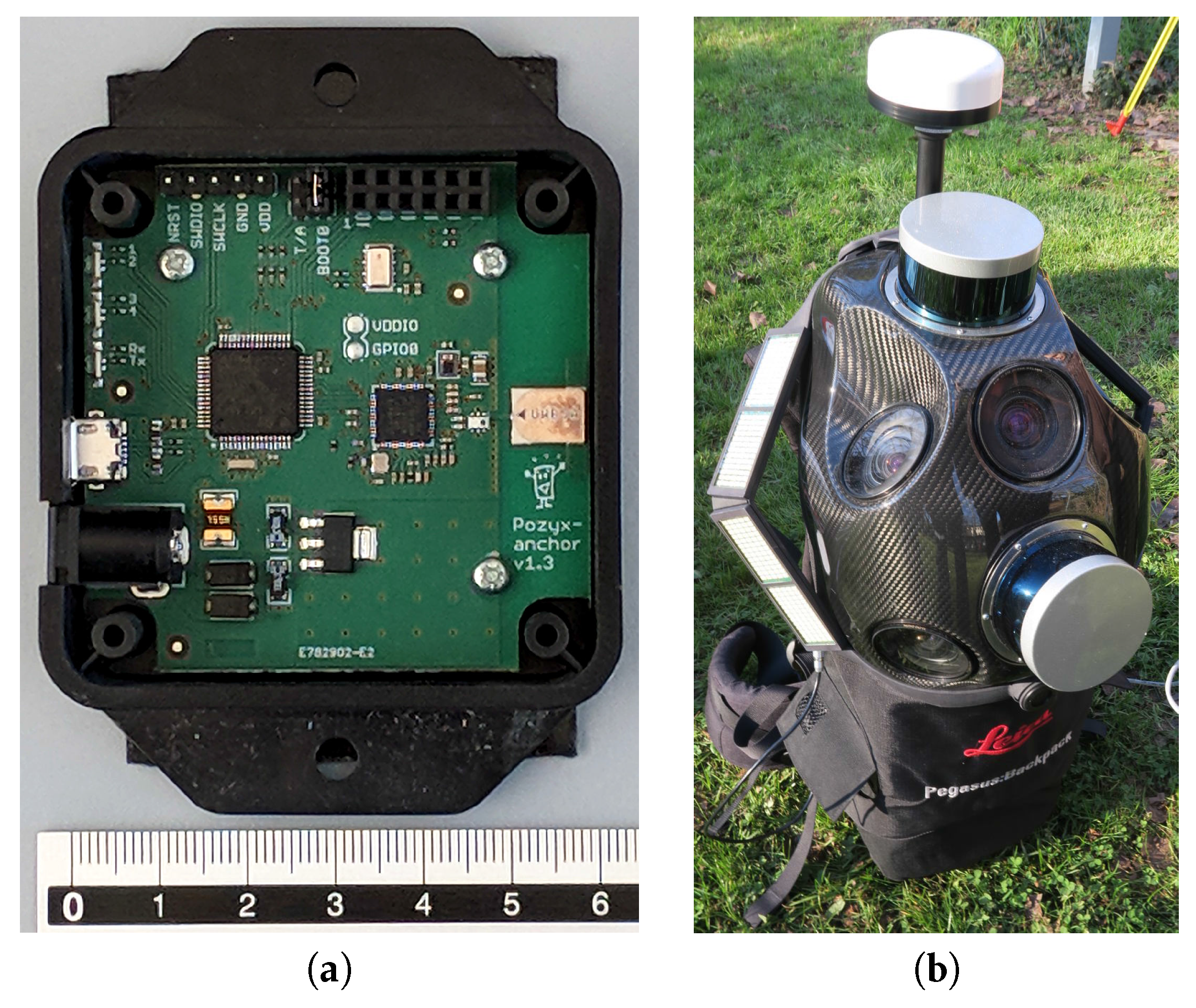
3. Leica Pegasus Backpack Survey
3.1. Precision Assessment
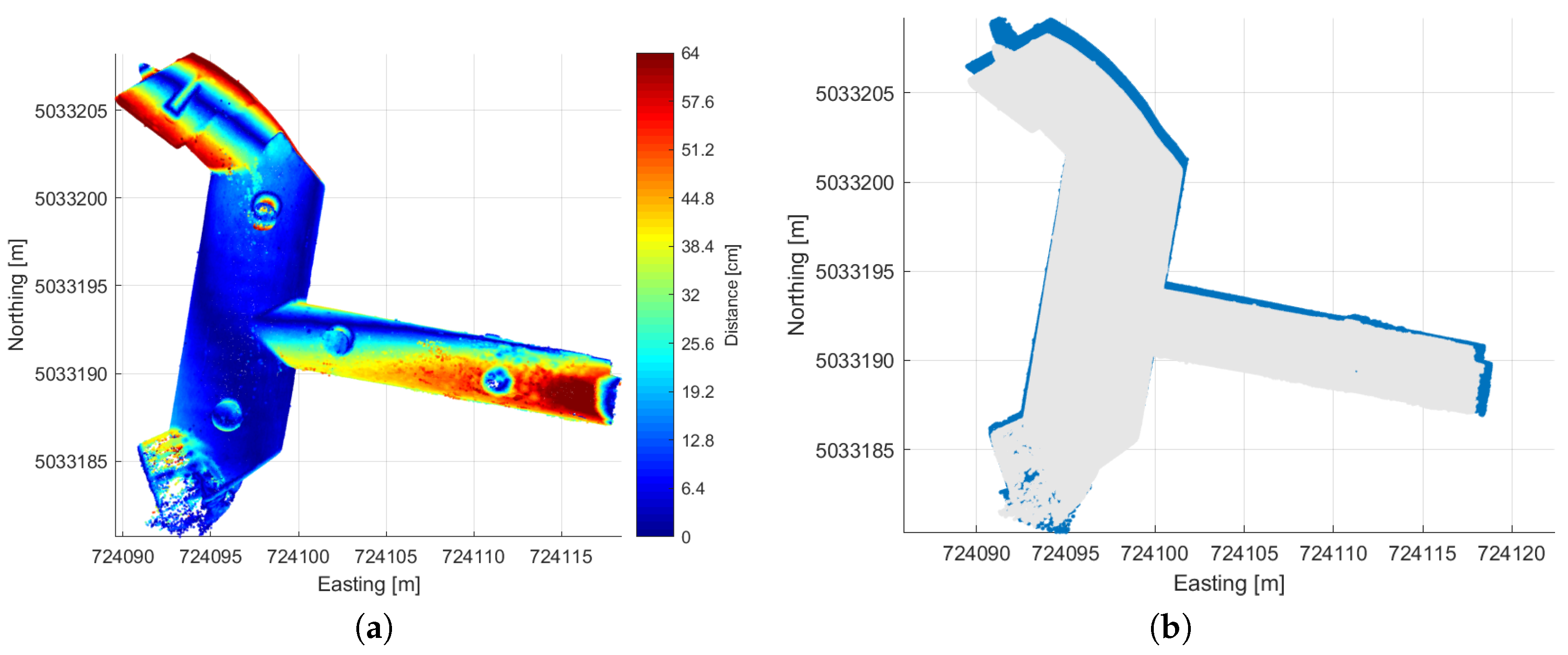
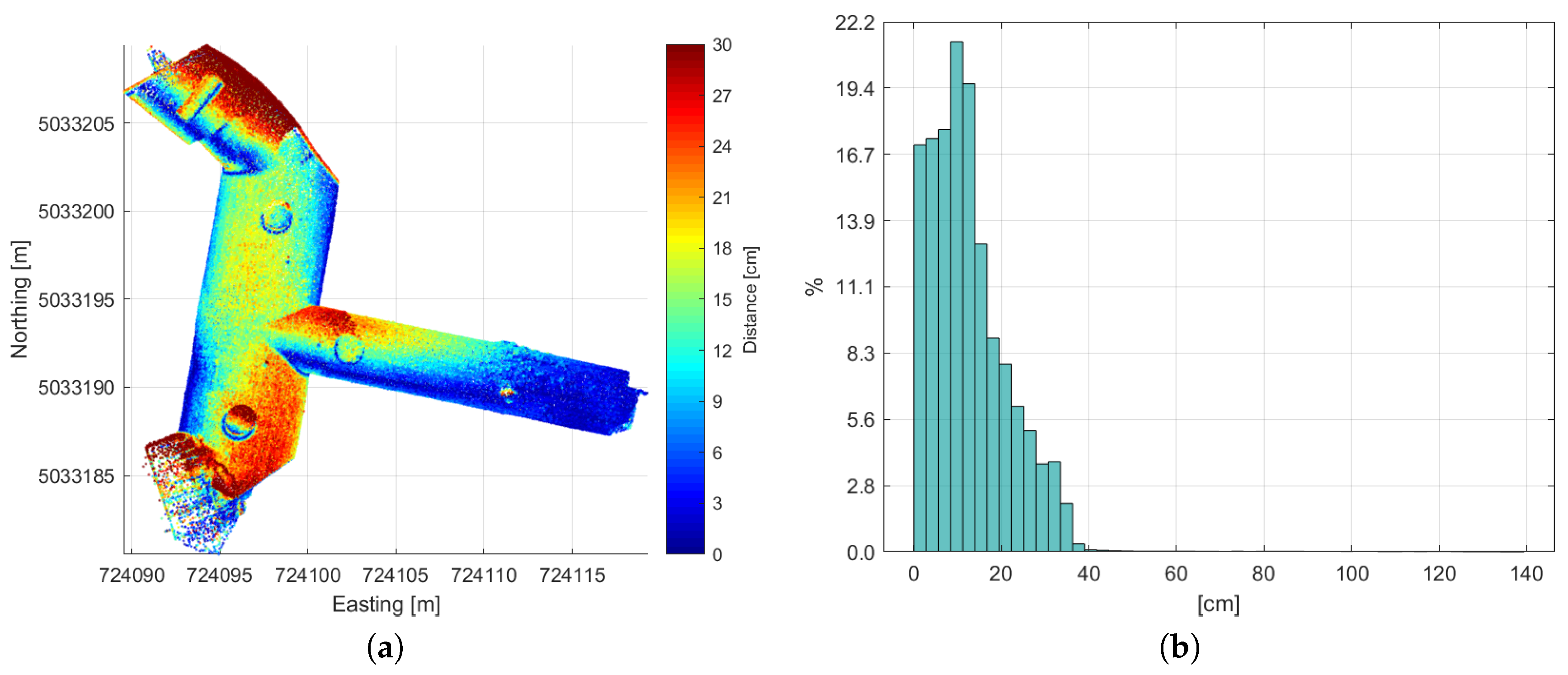
3.2. Accuracy Assessment: Relative Error with Respect to the TLS Model
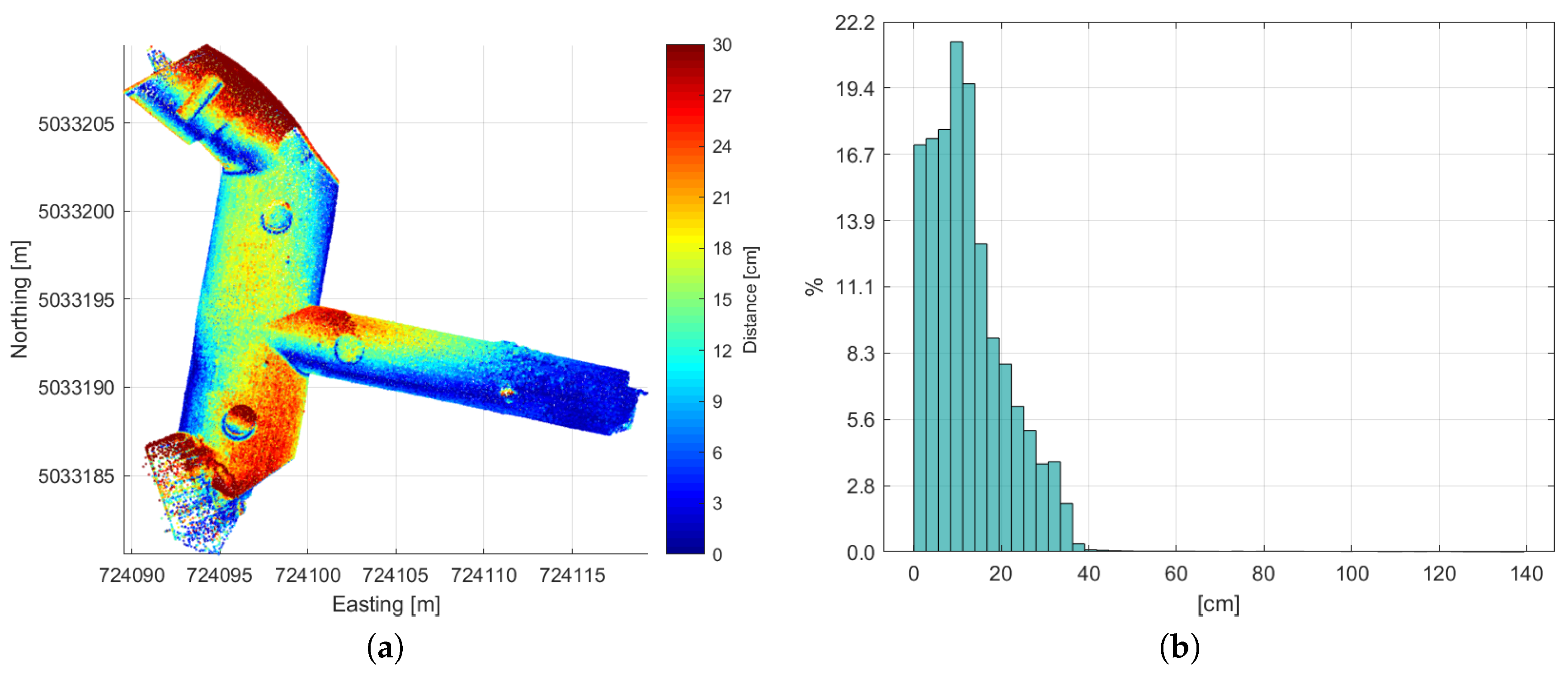
3.3. Accuracy Assessment: Absolute Error with Respect to the TLS Model
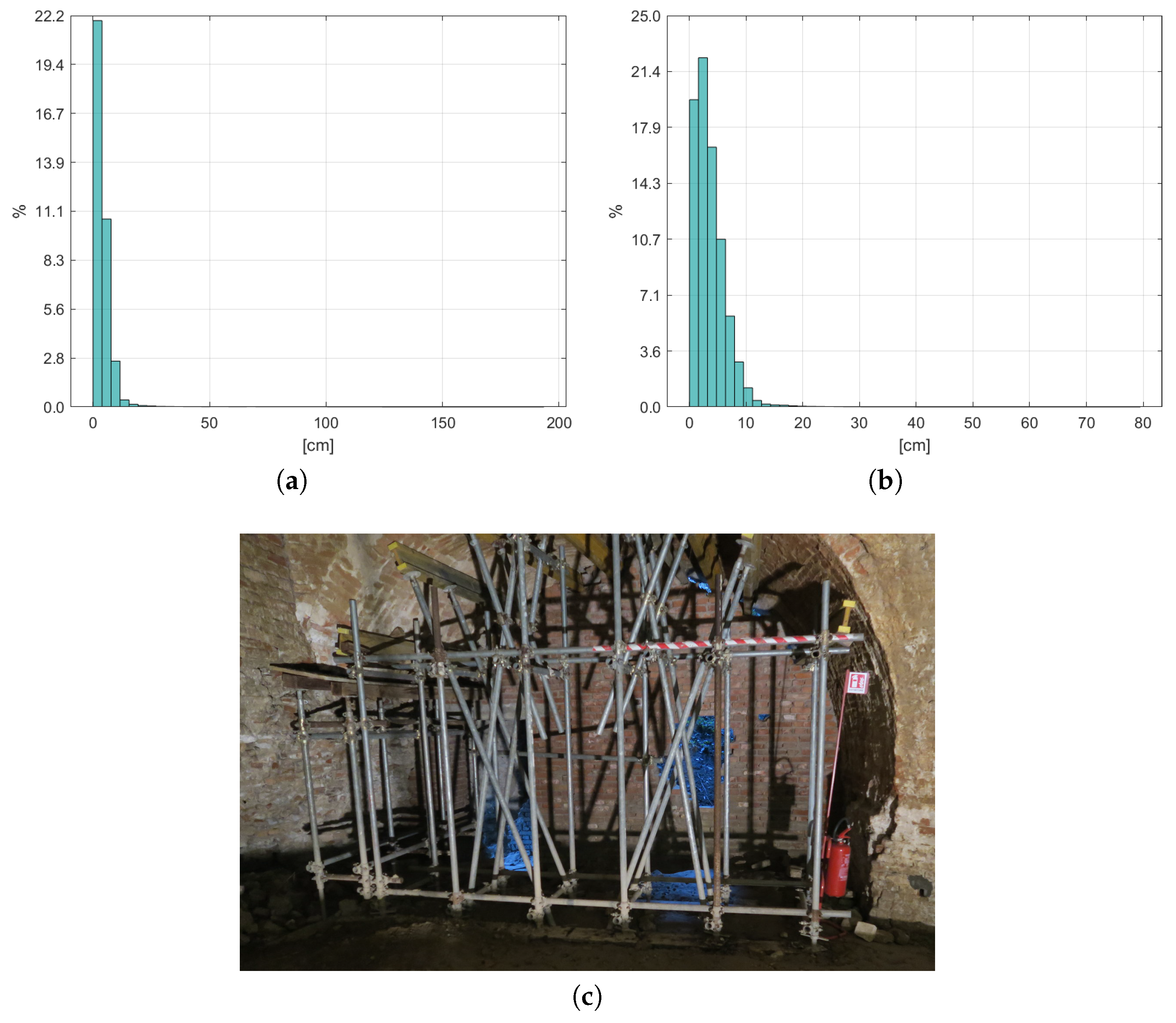
4. Photogrammetric Reconstruction with the UWB Positioning System
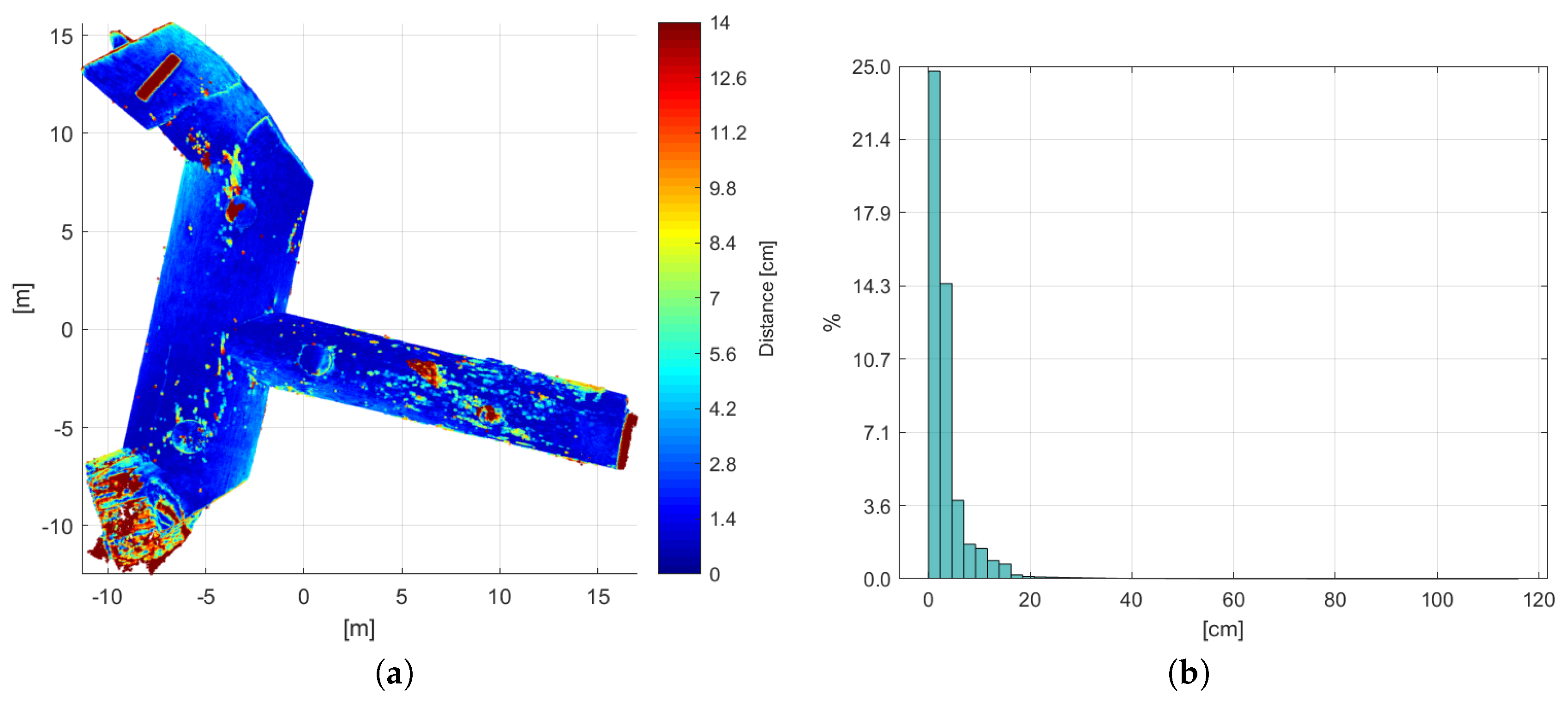
- (A)
- Relative error case: obtained registering the two point clouds by using the ICP algorithm. UWB anchor positions were estimated through the self-positioning procedure.
- (B)
- As in (A), but discarding the final part of the left wing of the bastion.
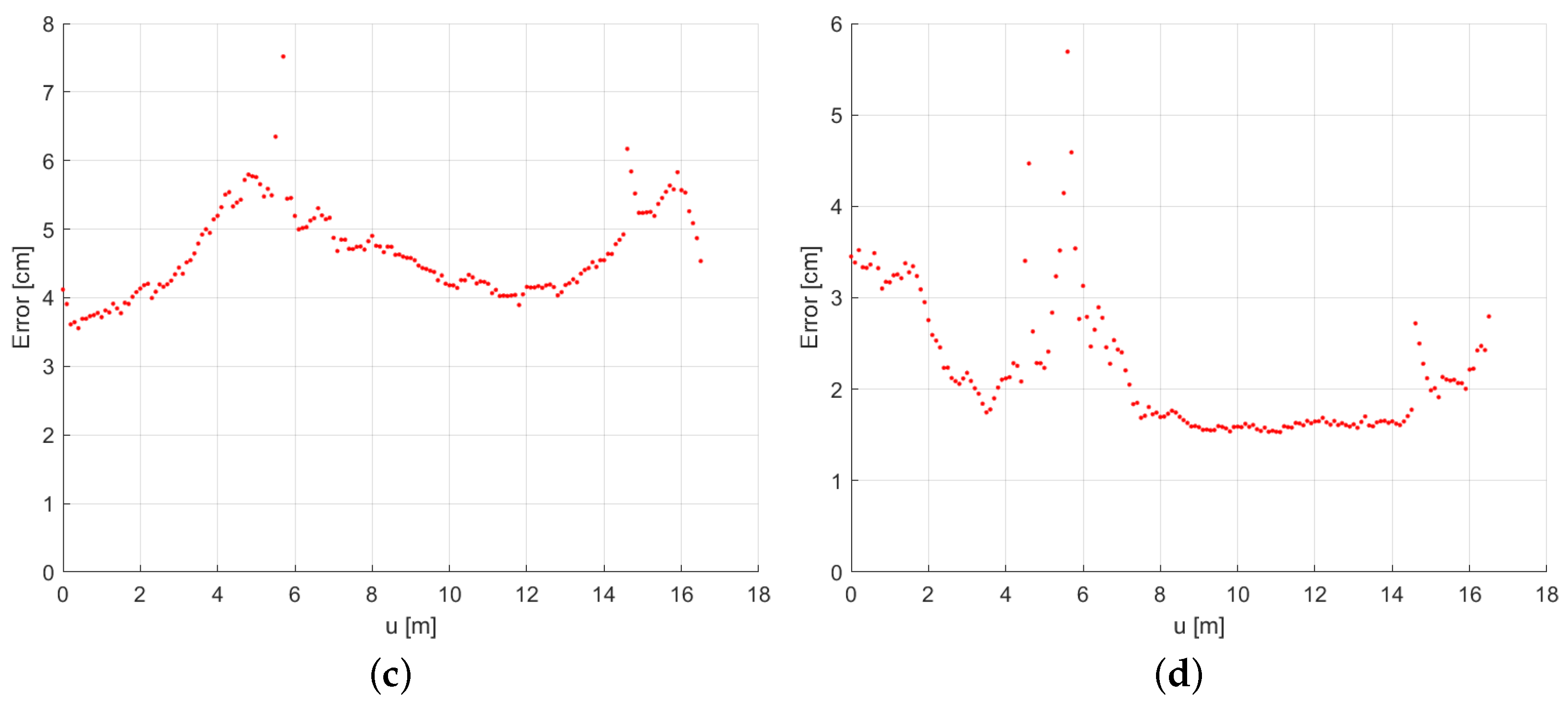
- (C)
- Relative error case: similarly to A, but with the optimal scale (experimentally set) of the photogrammetric reconstruction being used: this case should provide results on the relative error case similar to the use of ground CPs.
- (D)
- As in (C), but discarding the final part of the left wing of the bastion.
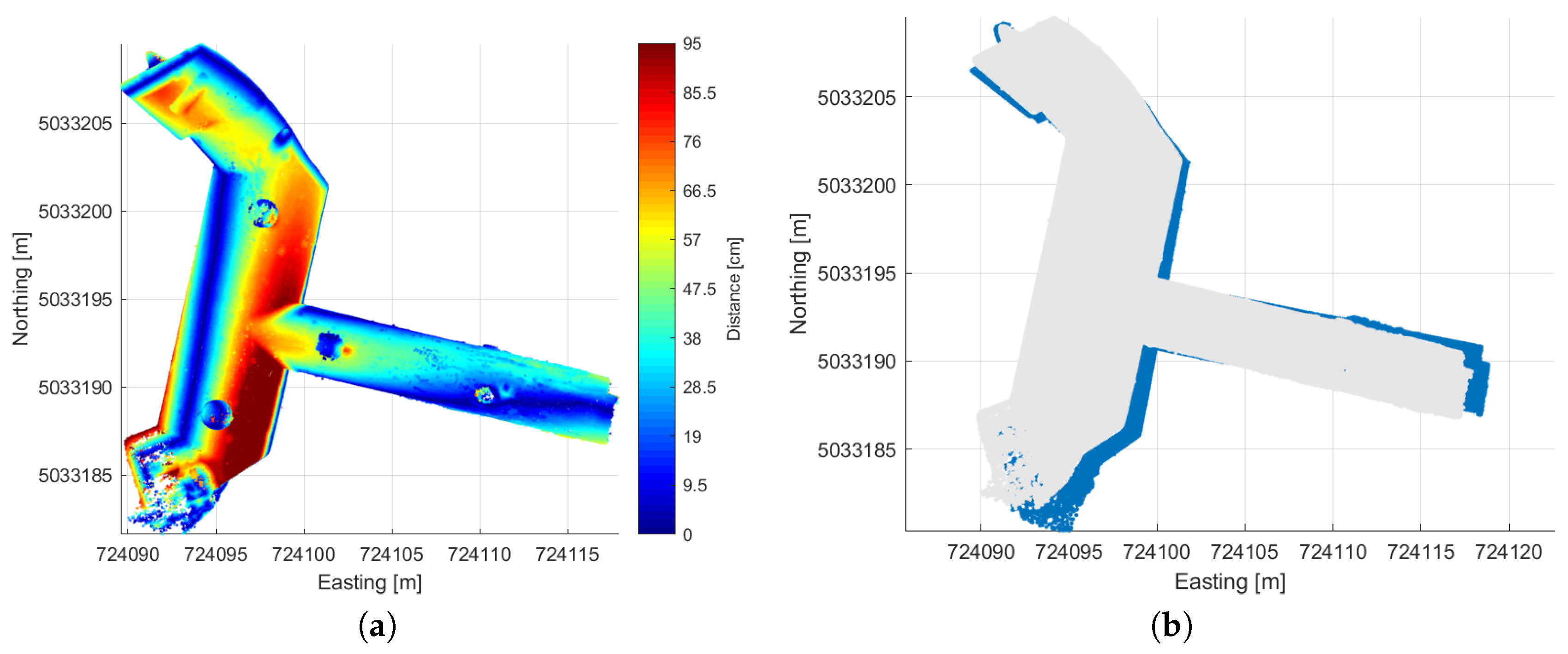
- (E)
- Absolute error case: obtained with UWB anchor positions estimated through the self-positioning procedure.
- (F)
- Similar to Case (A), but with surveyed anchor positions.
- (G)
- Similar to Case (E), but with surveyed anchor positions.
5. Discussion
- The obtained results show that both the mobile mapping systems (Leica Pegasus and UWB-based photogrammetry) allowed producing accurate 3D models in the relative error case, with quite comparable accuracy.
- Absolute accuracy (map coordinates) showed an apparent difference between the two portable systems (partially motivated by the use of a better IMU in the Leica Pegasus backpack with respect to the photogrammetric system proposed in this paper).
- Results shown in this paper confirm the nominal characteristics of the Leica Pegasus backpack, as listed in its specifications [15].
- Given its acceptable weight and quite good portability, the Leica Pegasus backpack is a very good candidate to produce accurate 3D models in areas where the GNSS signal is not available or hard to reach with other instruments (the weight of Leica ScanStation C10 is similar to the Pegasus one; however, the Pegasus backpack is easier to carry by a human operator in certain difficult environments).
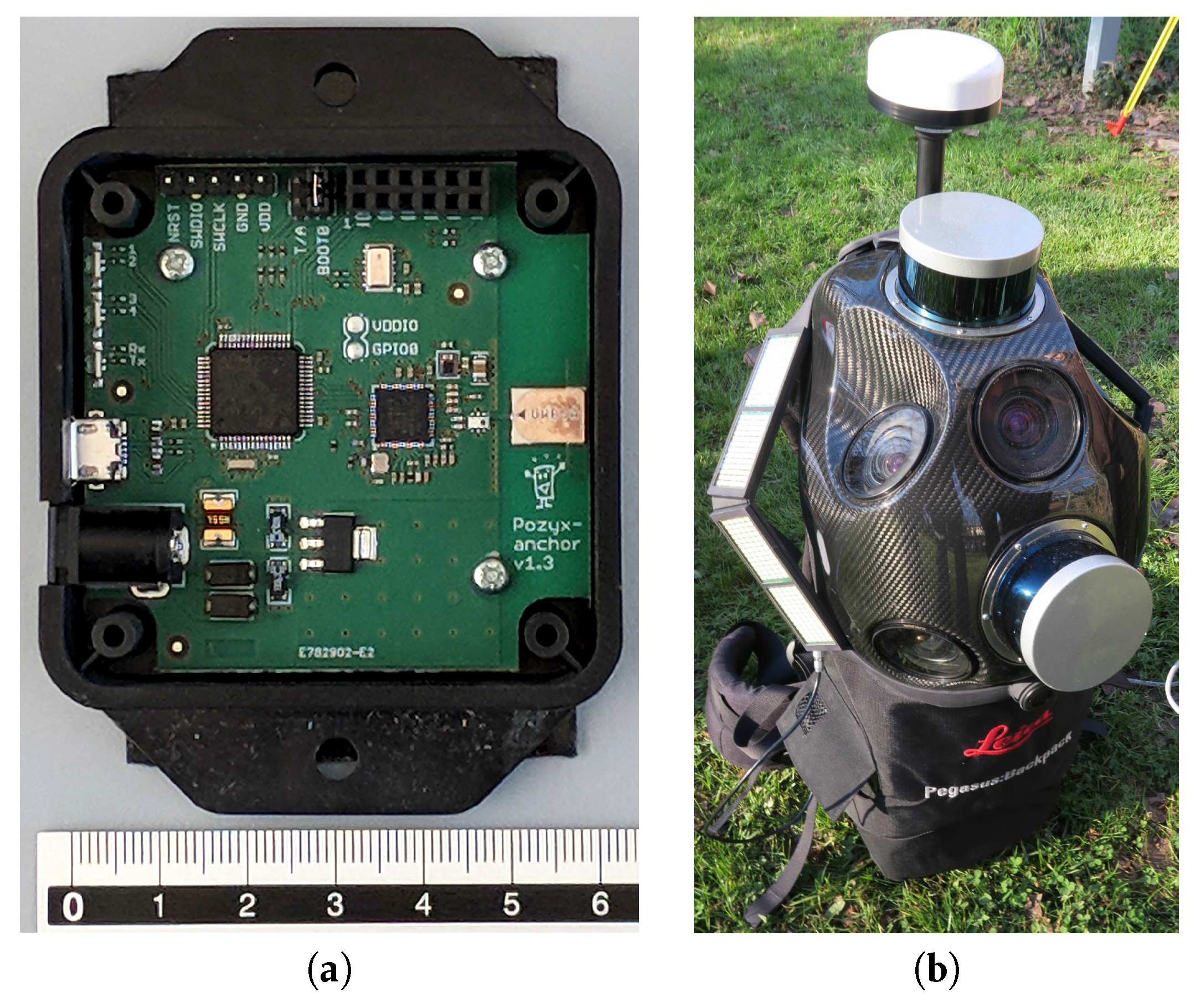
- Given the great portability of a standard camera and of Pozyx devices, which are small (the maximum side size is 6 cm) and lightweight (12 g, approximately), the proposed system is particularly well suited for mobile mapping applications where instruments have to be carried for long periods by human operators.
- In this paper, UWB self-positioning was performed assuming that anchors were distributed on a 2D planar surface. Future investigation will extend UWB self-positioning to more general cases.
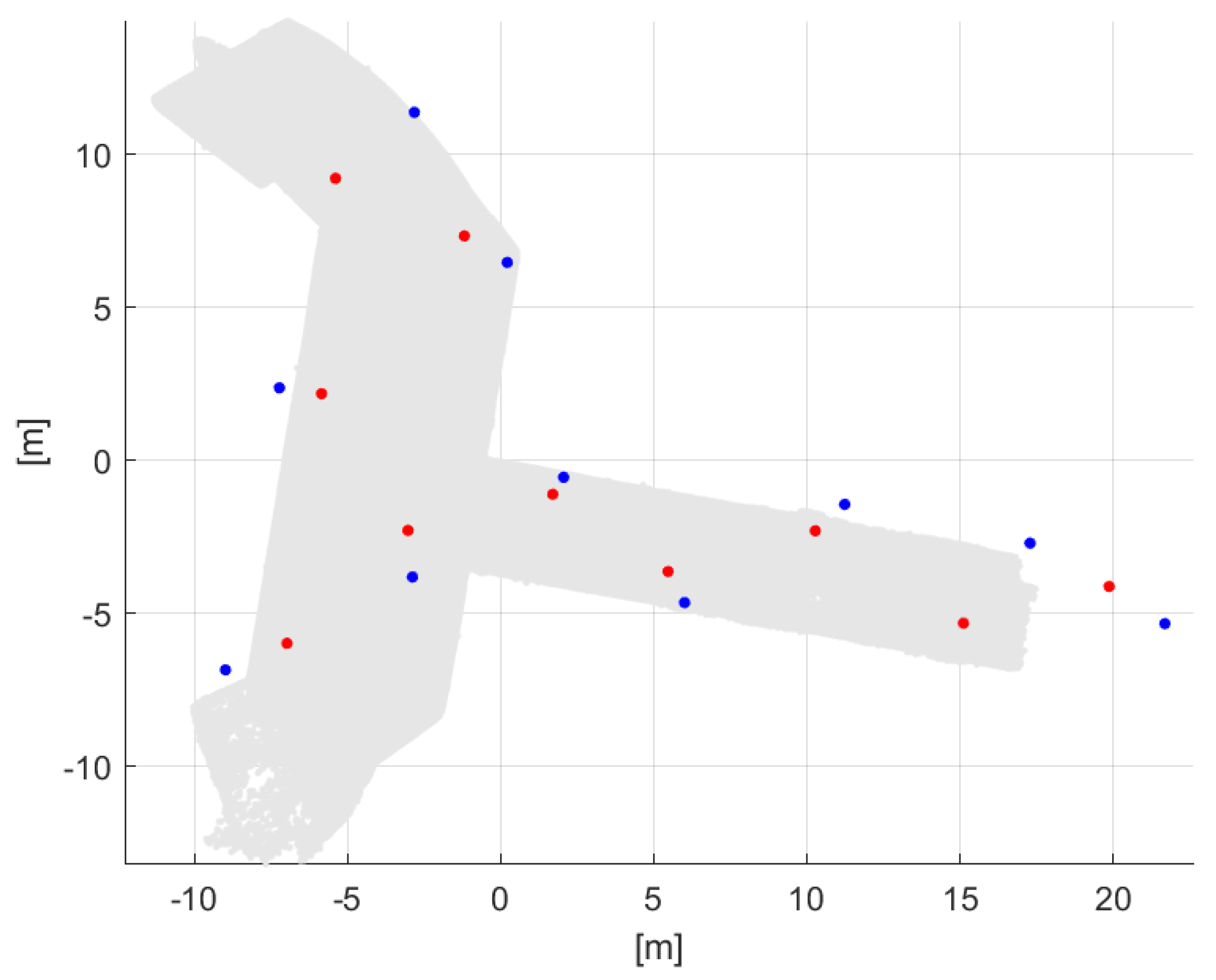
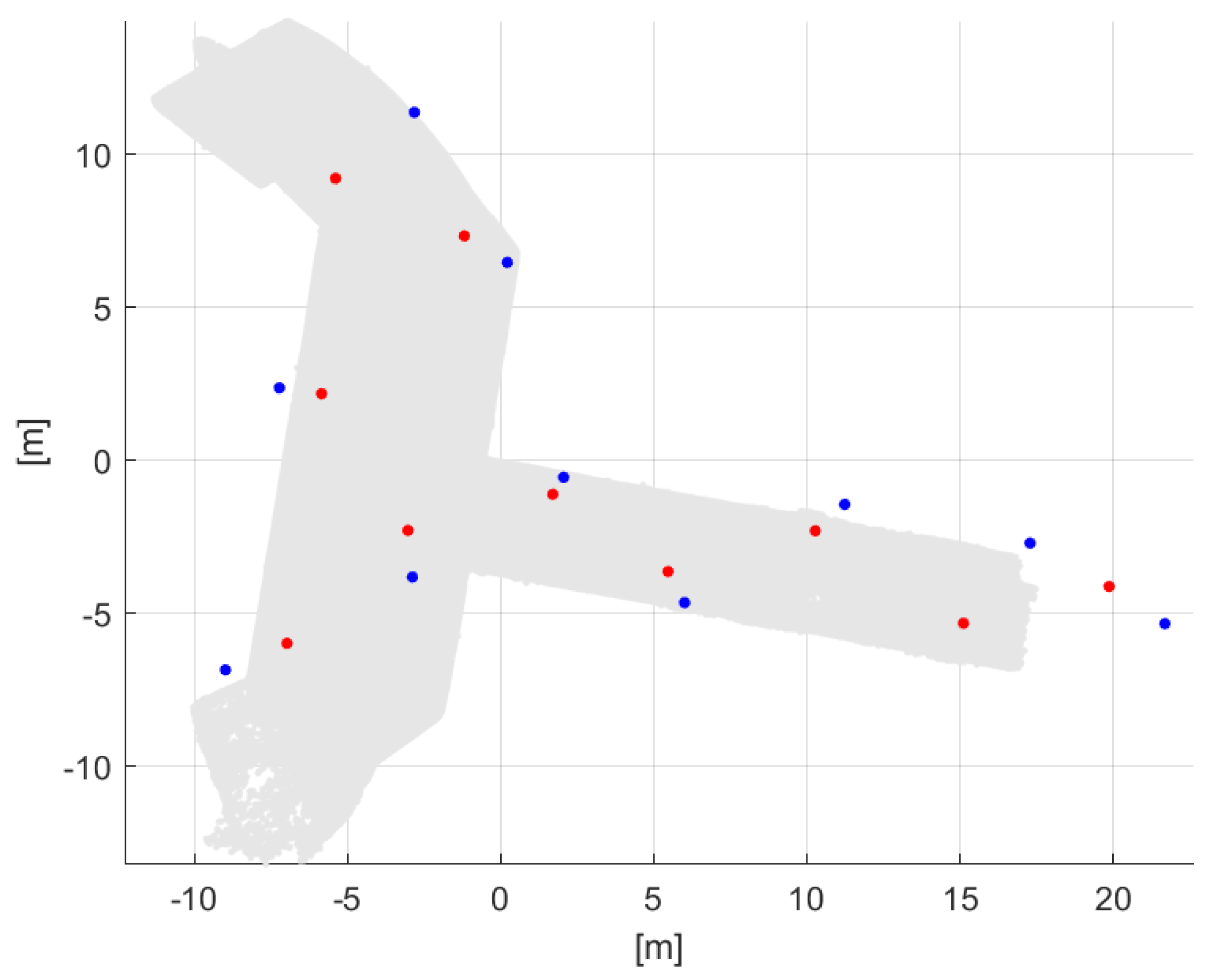
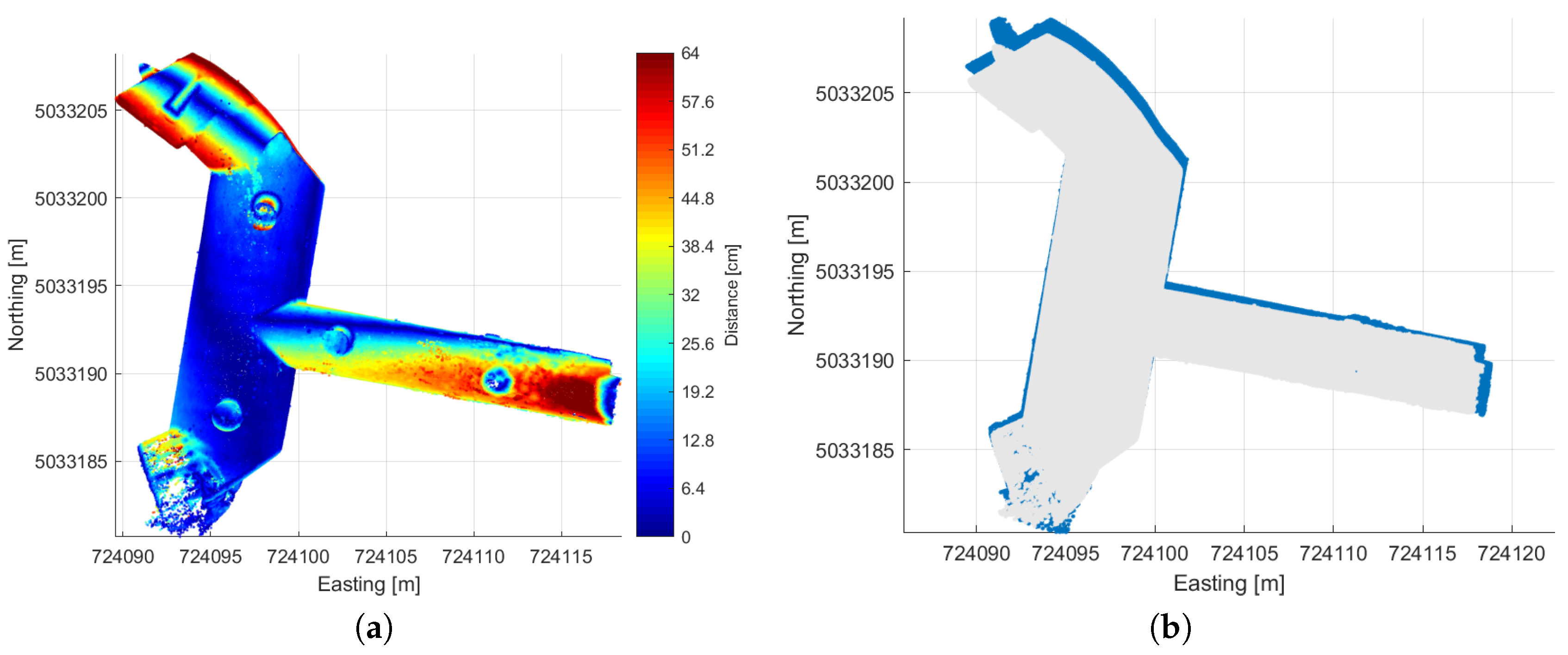
- Comparison of Figure 6a,b shows that the proposed UWB self-positioning procedure led to quite significant errors on certain estimated anchor positions. This had a relatively small effect on the scale estimation error; however, it negatively influenced the north-vertical direction estimation used for georeferencing (comparison between Case (E) and (G) in Table 4).
- Calibration errors of the camera-UWB rover system affect the performance of the photogrammetric system in the georeferenced case. Improvements shall be investigated, in particular to improve the relative orientation estimation.
- The synchronization procedure between camera and UWB acquisitions, presented in Section 4, is clearly subject to estimation errors. A more robust synchronization shall be considered to improve the results.
- Further future investigations will be dedicated to the reduction of photogrammetric error in the georeferenced case. Possible viable solutions that will be investigated are: including outdoor area in the photogrammetric reconstruction in order to make estimates of GNSS positions in the reconstruction more reliable, increasing the number of outdoor UWB anchors and/or GNSS points used for georeferencing the 3D model.
- Both Leica Pegasus backpack and the photogrammetric system presented in Section 4 allowed for significantly reducing the survey duration with respect to TLS. Most of the time of the backpack survey was spent on calibrating the backpack’s sensors, whereas data acquisition was very fast (a few minutes). The time to set up the UWB system was relatively fast (a few minutes), but image acquisition for photogrammetric reconstruction was longer than the backpack’s data acquisition.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- El-Sheimy, N.; Schwarz, K. Navigating urban areas by VISAT–A mobile mapping system integrating GPS/INS/digital cameras for GIS applications. Navigation 1998, 45, 275–285. [Google Scholar] [CrossRef]
- Toth, C. Sensor integration in airborne mapping. In Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference, Budapest, Hungary, 21–23 May 2001; Volume 3, pp. 2000–2005. [Google Scholar]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3D modeling-current status and future perspectives. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2011, 38. [Google Scholar] [CrossRef]
- Al Hamad, A.; El Sheimy, N. Smartphone based mobile mapping systems. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2014, 40, 29–34. [Google Scholar] [CrossRef]
- Piras, M.; Di Pietra, V.; Visintini, D. 3D modeling of industrial heritage building using COTSs system: Test, limits and performances. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2017, 42, 281–288. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, M.L.; Chu, C.H. The development of an UAV borne direct georeferenced photogrammetric platform for ground control point free applications. Sensors 2012, 12, 9161–9180. [Google Scholar] [CrossRef] [PubMed]
- Ballarin, M.; Balletti, C.; Faccio, P.; Guerra, F.; Saetta, A.; Vernier, P. Survey methods for seismic vulnerability assessment of historical masonry buildings. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2017, 42, 55–59. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Vettore, A. A low-cost UWB based solution for direct georeferencing UAV photogrammetry. Remote Sens. 2017, 9, 414. [Google Scholar] [CrossRef]
- Alsubaie, N.M.; Youssef, A.A.; El-Sheimy, N. Improving the accuracy of direct geo-referencing of smartphone-based mobile mapping systems using relative orientation and scene geometric constraints. Sensors 2017, 17, 2237. [Google Scholar] [CrossRef] [PubMed]
- Fissore, F.; Pirotti, F.; Vettore, A. Open source web tool for tracking in a low-cost MMS. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2017, 99–104. [Google Scholar] [CrossRef]
- Ellum, C.; El-Sheimy, N. The development of a backpack mobile mapping system. Int. Arch. Photogramm. Remote Sens. 2000, 33, 184–191. [Google Scholar]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile LiDAR and UAV-photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform Mobile Laser Scanning: Usability and Performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef]
- Leica Geosystems. Leica Pegasus: Backpack Wearable Mobile Mapping Solution. Available online: https://leica-geosystems.com/products/mobile-sensor-platforms/capture-platforms/leica-pegasus-backpack (accessed on 3 March 2018).
- Leica Geosystems. Leica Pegasus: Backpack. Mobile reality capture. Backpack specifications. Available online: https://leica-geosystems.com/-/media/files/leicageosystems/products/datasheets/leica_pegasusbackpack_ds.ashx?la=en-gb (accessed on 3 March 2018).
- Mikhail, E.M.; Bethel, J.S.; Mc Glone, J.C. Introduction to Modern Photogrammetry; Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- McGlone, C.; Mikhail, E.; Bethel, J.; Mullen, R. Manual of Photogrammetry; ASPRS: Bethesda, MD, USA, 1980. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.; Harley, I. Close Range Photogrammetry: Principles, Techniques And Applications; Whittles: Dunbeath, UK, 2006. [Google Scholar]
- Atkinson, K.B. Close Range Photogrammetry and Machine Vision; Whittles: Dunbeath, UK, 1996. [Google Scholar]
- Sahinoglu, Z.; Gezici, S.; Guvenc, I. Ultra-Wideband Positioning Systems; Cambridge University Press: Cambridge, UK, 2008; Volume 2. [Google Scholar]
- Lee, J.S.; Su, Y.W.; Shen, C.C. A comparative study of wireless protocols: Bluetooth, UWB, ZigBee, and Wi-Fi. In Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 46–51. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Pozyx Labs. Pozyx Positioning System. Available online: https://www.pozyx.io/ (accessed on 3 March 2018).
- Habib, A.; Morgan, M. Automatic calibration of low-cost digital cameras. Opt. Eng. 2003, 42, 948–955. [Google Scholar]
- Heikkila, J.; Silven, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar]
- Remondino, F.; Fraser, C. Digital camera calibration methods: considerations and comparisons. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2006, 36, 266–272. [Google Scholar]
- Fraser, C.; Stamatopoulos, C. Automated target-free camera calibration. In Proceedings of the ASPRS 2014 Annual Conference, Louisville, KY, USA, 23–28 March 2014; Volume 2328. [Google Scholar]
- Luhmann, T.; Fraser, C.; Maas, H.G. Sensor modelling and camera calibration for close-range photogrammetry. J. Photogramm. Remote Sens. 2015, 115, 37–46. [Google Scholar] [CrossRef]
- Agisoft PhotoScan. Available online: http://www.agisoft.com/ (accessed on 3 March 2018).
- Topcon Positioning Systems, Inc. HiPer V. Available online: https://www.topconpositioning.com/gnss/integrated-gnss-receivers/hiper-v (accessed on 3 March 2018).
- Farrell, J.; Barth, M. The Global Positioning System and Inertial Navigation; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Farrell, J. Aided Navigation: GPS with High Rate Sensors; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Leonard, J.; Durrant-Whyte, H. Simultaneous map building and localization for an autonomous mobile robot. In Proceedings of the IROS ’91. IEEE/RSJ International Workshop on Intelligent Robots and Systems ’91. ’Intelligence for Mechanical Systems, Osaka, Japan, 3–5 November 1991; Volume 3, pp. 1442–1447. [Google Scholar]
- Smith, R.C.; Cheeseman, P. On the representation and estimation of spatial uncertainty. Int. J. Robot. Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Guarnieri, A.P.M.; Vettore, A. Comparison of low-cost photogrammetric survey with TLS and Leica Pegasus backpack 3D models. Int. Arch. Photogramm. Remote Sens. Spa. Inf. Sci. 2017, 42, 147–153. [Google Scholar] [CrossRef]
- NetGEO. Available online: www.netgeo.it/ (accessed on 3 March 2018).
- Besl, P.; McKay, N. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 4, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Hol, J. Sensor Fusion and Calibration of Inertial Sensors, Vision, Ultra-Wideband and GPS. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2011. [Google Scholar]
- Toth, C.; Jozkow, G.; Ostrowski, S.; Grejner-Brzezinska, D. Positioning slow moving platforms by UWB technology in GPS-challenged areas. In Proceedings of the The 9th International Symposium on Mobile Mapping Technology, Sydney, Australia, 9–11 December 2015. [Google Scholar]
- Dierenbach, K.; Ostrowski, S.; Jozkow, G.; Toth, C.; Grejner-Brzezinska, D.; Koppanyi, Z. UWB for Navigation in GNSS Compromised Environments. In Proceedings of the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 2380–2389. [Google Scholar]
- Goel, S.; Kealy, A.; Gikas, V.; Retscher, G.; Toth, C.; Brzezinska, D.G.; Lohani, B. Cooperative Localization of Unmanned Aerial Vehicles Using GNSS, MEMS Inertial, and UWB Sensors. J. Surv. Eng. 2017, 143, 04017007. [Google Scholar] [CrossRef]
- Monica, S.; Ferrari, G. An experimental model for UWB distance measurements and its application to localization problems. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 297–302. [Google Scholar]
- Wen, K.; Yu, K.; Li, Y. An experimental correction model for UWB through-the-wall distance measurements. In Proceedings of the 2016 IEEE International Conference on Ubiquitous Wireless Broadband (ICUWB), Nanjing, China, 16–19 October 2016; pp. 1–4. [Google Scholar]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: North Chelmsford, MA, USA, 2012. [Google Scholar]
- Pirkl, G.; Munaretto, D.; Fischer, C.; An, C.; Lukowicz, P.; Klepal, M.; Timm-Giel, A.; Widmer, J.; Pesch, D.; Gellersen, H. Virtual lifeline: Multimodal sensor data fusion for robust navigation in unknown environments. Pervasive Mob. Comput. 2012, 8, 388–401. [Google Scholar]
- Saeedi, S.; Moussa, A.; El-Sheimy, N. Context-Aware Personal Navigation Using Embedded Sensor Fusion in Smartphones. Sensors 2014, 14, 5742–5767. [Google Scholar] [CrossRef] [PubMed]
- Masiero, A.; Guarnieri, A.; Pirotti, F.; Vettore, A. A Particle Filter for Smartphone-Based Indoor Pedestrian Navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Hol, J.; Schön, T.; Gustafsson, F. Modeling and Calibration of Inertial and Vision Sensors. Int. J. Robot. Res. 2010, 29, 231–244. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Error (cm) | RMS (cm) | Maximum Error (cm) | |
|---|---|---|---|
| absolute error | 4.7 | 5.8 | 110.3 |
| relative error | 2.2 | 3.1 | 60.5 |
| Average Error (cm) | RMS (cm) | Maximum Error (cm) | |
|---|---|---|---|
| relative error | 4.3 | 8.2 | 193.4 |
| relative error (without left wing) | 3.6 | 4.6 | 79.3 |
| Average Error (cm) | RMS (cm) | Maximum Error (cm) | |
|---|---|---|---|
| absolute error | 12.8 | 16.1 | 139.3 |
| absolute error (without left wing) | 11.7 | 14.4 | 67.8 |
| Average Error (cm) | RMS (cm) | Max Error (cm) | |
|---|---|---|---|
| (A) relative error | 3.6 | 6.1 | 115.9 |
| (B) relative error without left wing | 3.1 | 4.9 | 79.7 |
| (C) relative error + opt.scale | 2.2 | 5.9 | 120.9 |
| (D) relative error + opt.scale without left wing | 1.9 | 4.7 | 90.8 |
| (E) absolute error | 42.0 | 50.3 | 134.9 |
| (F) relative error + surveyed anchor positions | 6.6 | 9.7 | 114.0 |
| (G) absolute error + surveyed anchor positions | 23.7 | 30.7 | 109.2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Visintini, D.; Vettore, A. Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning. Appl. Sci. 2018, 8, 416. https://doi.org/10.3390/app8030416
Masiero A, Fissore F, Guarnieri A, Pirotti F, Visintini D, Vettore A. Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning. Applied Sciences. 2018; 8(3):416. https://doi.org/10.3390/app8030416
Chicago/Turabian StyleMasiero, Andrea, Francesca Fissore, Alberto Guarnieri, Francesco Pirotti, Domenico Visintini, and Antonio Vettore. 2018. "Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning" Applied Sciences 8, no. 3: 416. https://doi.org/10.3390/app8030416
APA StyleMasiero, A., Fissore, F., Guarnieri, A., Pirotti, F., Visintini, D., & Vettore, A. (2018). Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning. Applied Sciences, 8(3), 416. https://doi.org/10.3390/app8030416