High-Frame-Rate Doppler Ultrasound Using a Repeated Transmit Sequence


Abstract
1. Introduction
2. Materials and Methods
2.1. Theory
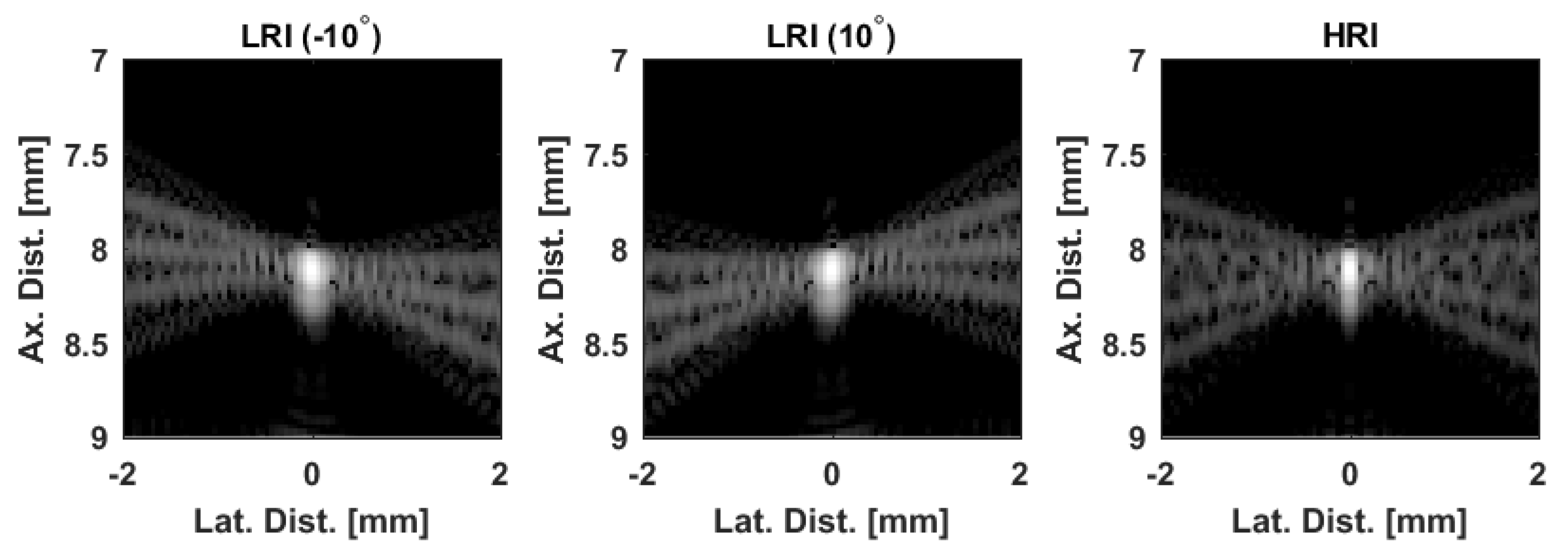
2.1.1. Coherent Plane-Wave Compounding
2.1.2. The Polyphase Decomposition
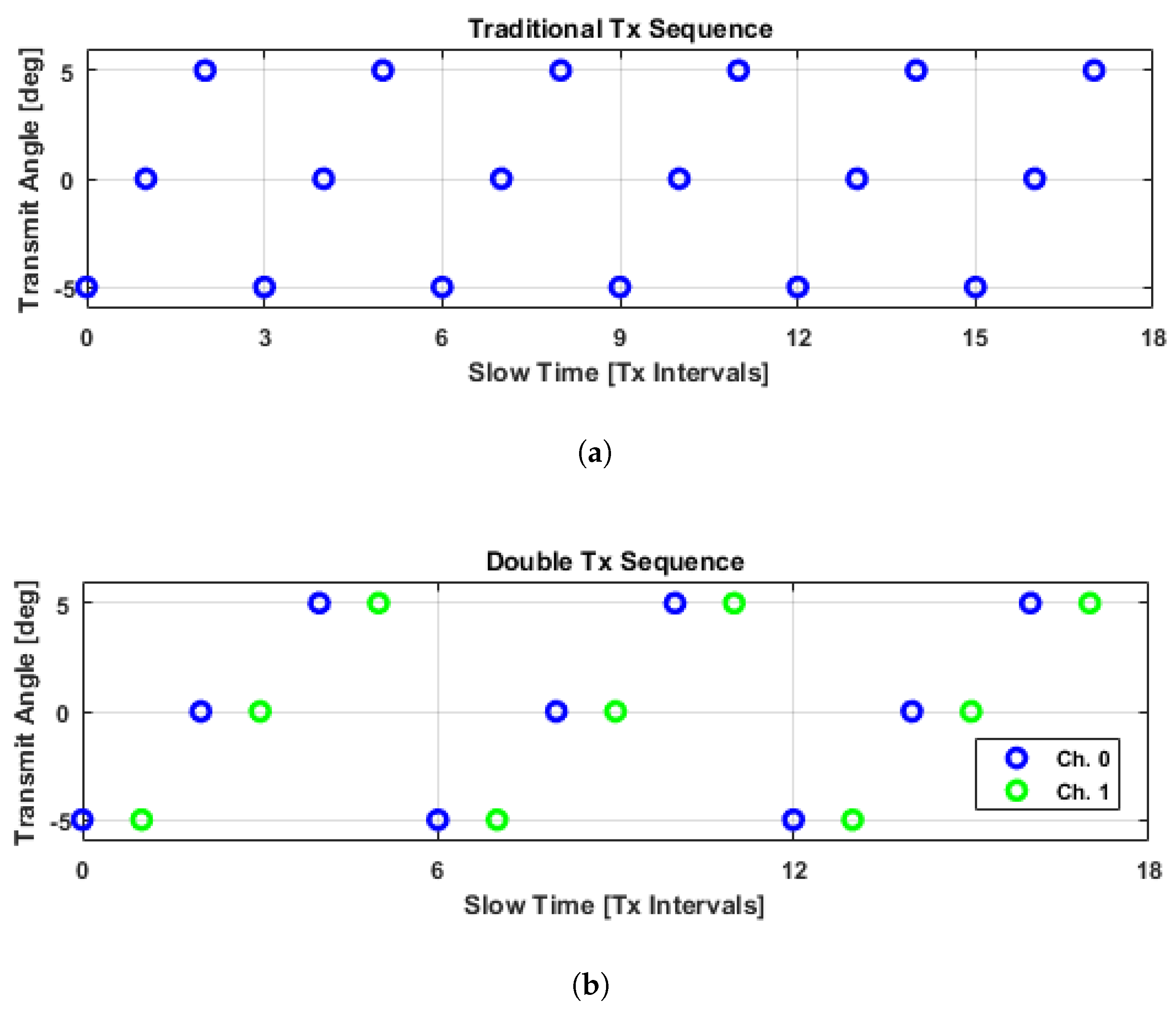
2.1.3. Double Transmit Sequence
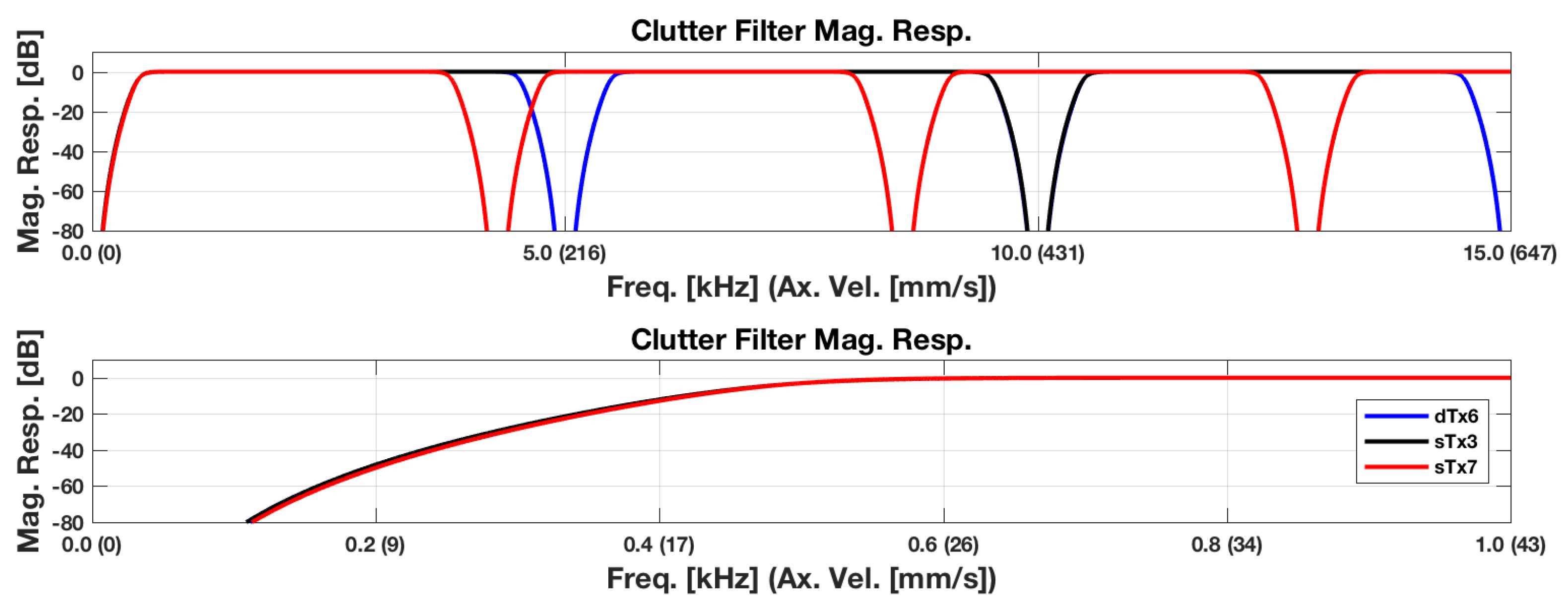
2.1.4. Clutter Filtering
2.1.5. Lag-One Estimation
2.1.6. Pairwise Lag-One Estimation
2.1.7. HRI Pairwise Lag-One Estimation
2.2. Experimental Design
2.2.1. Ultrasound Acquisition
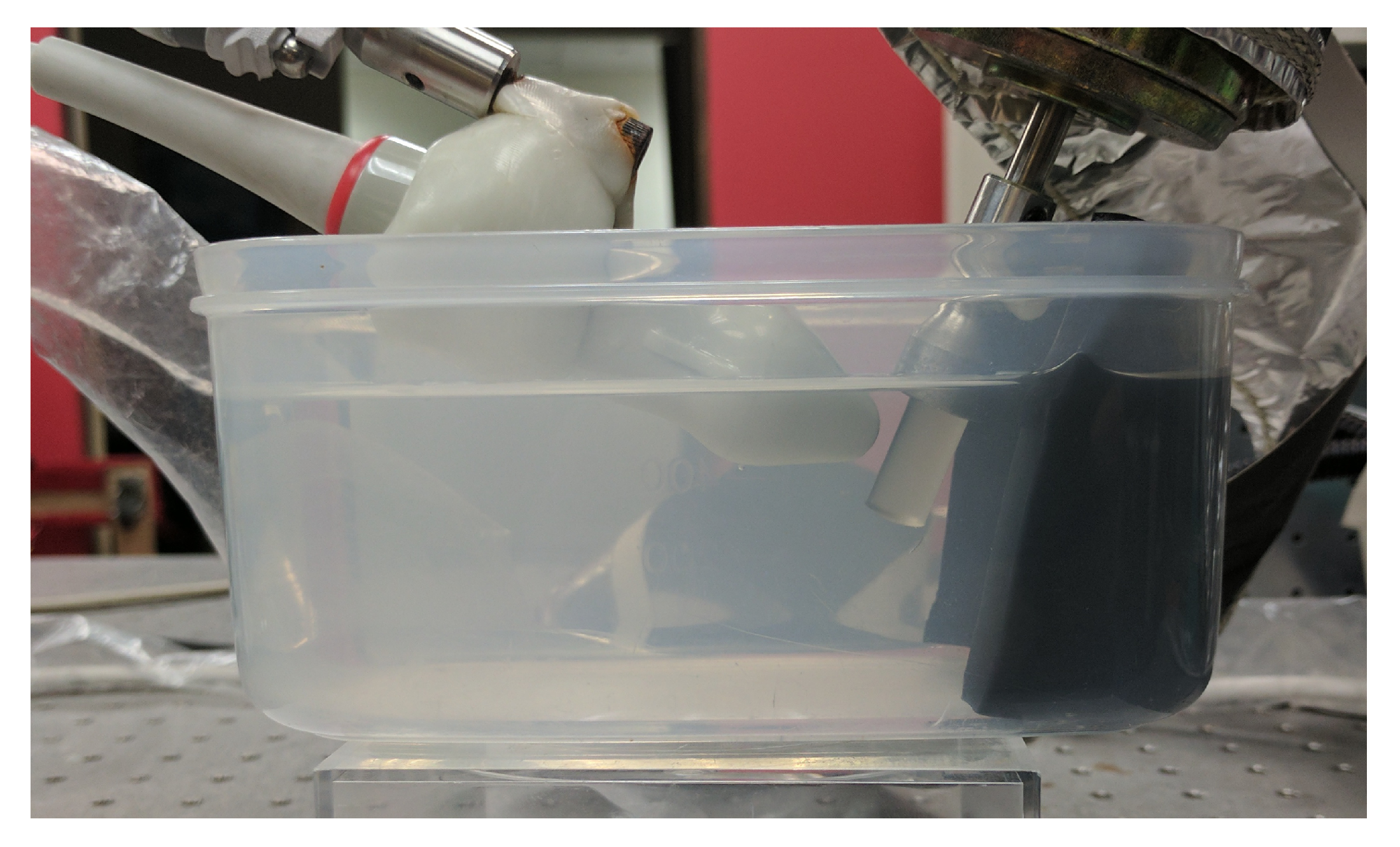
2.2.2. Rotation Phantom
2.2.3. Transmission Sequences
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PRF | Pulse repetition frequency |
| HRI | High-resolution image/compounded image |
| LRI | Low-resolution image/pre-compounded image |
| PSF | Point spread function |
| RMSE | Root-mean-square error |
| sTx | Single transmit sequence (dataset prefix) |
| dTx | Double transmit sequence (dataset prefix) |
| PW | Pairwise, (estimation scheme suffix) |
| SNR | Signal-to-noise ratio |
Appendix A. Multirate Theorems of Coherent Plane Wave Compounding





References
- Evans, D.H. Colour flow and motion imaging. Proc. Inst. Mech. Eng. H 2010, 224, 241–253. [Google Scholar] [CrossRef] [PubMed]
- Kasai, C.; Namekawa, K.; Koyano, A.; Omoto, R. Real-time two-dimensional blood flow imaging using an autocorrelation technique. IEEE Trans. Son. Ultrason. 1985, 32, 458–464. [Google Scholar] [CrossRef]
- Lu, J.Y. 2D and 3D high frame rate imaging with limited diffraction beams. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 1997, 44, 839–856. [Google Scholar] [CrossRef]
- Lu, J.; Cheng, J.; Wang, J. High frame rate imaging system for limited diffraction array beam imaging with square-wave aperture weightings. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2006, 53, 1796–1812. [Google Scholar] [CrossRef]
- Cheng, J.; Lu, J.Y. Extended high-frame rate imaging method with limited-diffraction beams. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2006, 53, 880–899. [Google Scholar] [CrossRef]
- Montaldo, G.; Tanter, M.; Bercoff, J.; Benech, N.; Fink, M. Coherent plane-wave compounding for very high frame rate ultrasonography and transient elastography. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2009, 56, 489–506. [Google Scholar] [CrossRef] [PubMed]
- Hasegawa, H.; Kanai, H. High-frame-rate echocardiography using diverging transmit beams and parallel receive beamforming. J. Med. Ultrason. 2011, 38, 129–140. [Google Scholar] [CrossRef] [PubMed]
- Tong, L.; Gao, H.; Choi, H.F.; D’Hooge, J. Comparison of conventional parallel beamforming with plane wave and diverging wave imaging for cardiac applications: A simulation study. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2012, 59, 1654–1663. [Google Scholar] [CrossRef] [PubMed]
- Hartley, C.J.; Michael, L.H.; Entman, M.L. Noninvasive measurement of ascending aortic blood velocity in mice. Am. J. Physiol. 1995, 268, H499–H505. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lu, J.Y. Motion artifacts of extended high frame rate imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2007, 54, 1303–1315. [Google Scholar] [CrossRef]
- Denarie, B.; Tangen, T.A.; Ekroll, I.K.; Rolim, N.; Torp, H.; Bjastad, T.; Lovstakken, L. Coherent plane wave compounding for very high frame rate ultrasonography of rapidly moving targets. IEEE Trans. Med. Imaging 2013, 32, 1265–1276. [Google Scholar] [CrossRef] [PubMed]
- Poree, J.; Posada, D.; Hodzic, A.; Tournoux, F.; Cloutier, G.; Garcia, D. High-frame-rate echocardiography using coherent compounding with Doppler-based motion-compensation. IEEE Trans. Med. Imaging 2016, 35, 1647–1657. [Google Scholar] [CrossRef] [PubMed]
- Ekroll, I.K.; Voormolen, M.M.; Standal, O.K.V.; Rau, J.M.; Lovstakken, L. Coherent compounding in Doppler imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2015, 62, 1634–1643. [Google Scholar] [CrossRef] [PubMed]
- Vaidyanathan, P. Multirate Systems and Filter Banks; Prentice Hall: Upper Saddle River, NJ, USA, 1993; pp. 100–108, 119, 120–122. [Google Scholar]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing: Principles Algorithms and Applications, 4th ed.; Pearson Education Inc.: Upper Saddle River, NJ, USA, 2007; pp. 654–727, 755–759, 760. [Google Scholar]
- Yiu, B.Y.S.; Tsang, I.K.H.; Yu, A.C.H. GPU-based beamformer: fast realization of plane wave compounding and synthetic aperture imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2011, 58, 1698–1705. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Excitation Frequency | 17.857 MHz |
| Received Center Frequency | 15.625 MHz |
| Received Center Wavelength | 98.56 m |
| Received Bandwidth | 14–22 MHz |
| Elevation Focus | 8 mm |
| Element Height | 1.5 mm |
| Element Width | 80 m |
| Element Pitch | 100 m/1.01 |
| Estimate | IQ Frame Rate (kHz) | Corr. Lag (s) | Nyquist Velocity (mm/s) | Corr. Frame Rate (kHz) | Averaging Interval (Samples) | Averaging Interval (ms) |
|---|---|---|---|---|---|---|
| sTx3 HRI | 10 | 100.0 | 246.4 | 10 | 11 | 1.100 |
| sTx7 HRI | 4.286 | 233.3 | 105.6 | 4.286 | 5 | 1.167 |
| dTx6 HRI | 5 | 200.0 | 123.2 | 5 | 5 | 1.000 |
| sTx3 LRI | 30 | 33.3 | 739.2 | 30 | 31 | 1.033 |
| sTx7 LRI | 30 | 33.3 | 739.2 | 30 | 31 | 1.033 |
| dTx6 LRI | 30 | 33.3 | 739.2 | 30 | 31 | 1.033 |
| dTx6 LRI PW | 30 | 33.3 | 739.2 | 15 | 15 | 1.000 |
| dTx6 HRI PW | 30 | 33.3 | 739.2 | 5 | 5 | 1.000 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Podkowa, A.S.; Oelze, M.L.; Ketterling, J.A. High-Frame-Rate Doppler Ultrasound Using a Repeated Transmit Sequence. Appl. Sci. 2018, 8, 227. https://doi.org/10.3390/app8020227
Podkowa AS, Oelze ML, Ketterling JA. High-Frame-Rate Doppler Ultrasound Using a Repeated Transmit Sequence. Applied Sciences. 2018; 8(2):227. https://doi.org/10.3390/app8020227
Chicago/Turabian StylePodkowa, Anthony S., Michael L. Oelze, and Jeffrey A. Ketterling. 2018. "High-Frame-Rate Doppler Ultrasound Using a Repeated Transmit Sequence" Applied Sciences 8, no. 2: 227. https://doi.org/10.3390/app8020227
APA StylePodkowa, A. S., Oelze, M. L., & Ketterling, J. A. (2018). High-Frame-Rate Doppler Ultrasound Using a Repeated Transmit Sequence. Applied Sciences, 8(2), 227. https://doi.org/10.3390/app8020227