The Influence of Sensor Size on Acoustic Emission Waveforms—A Numerical Study



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
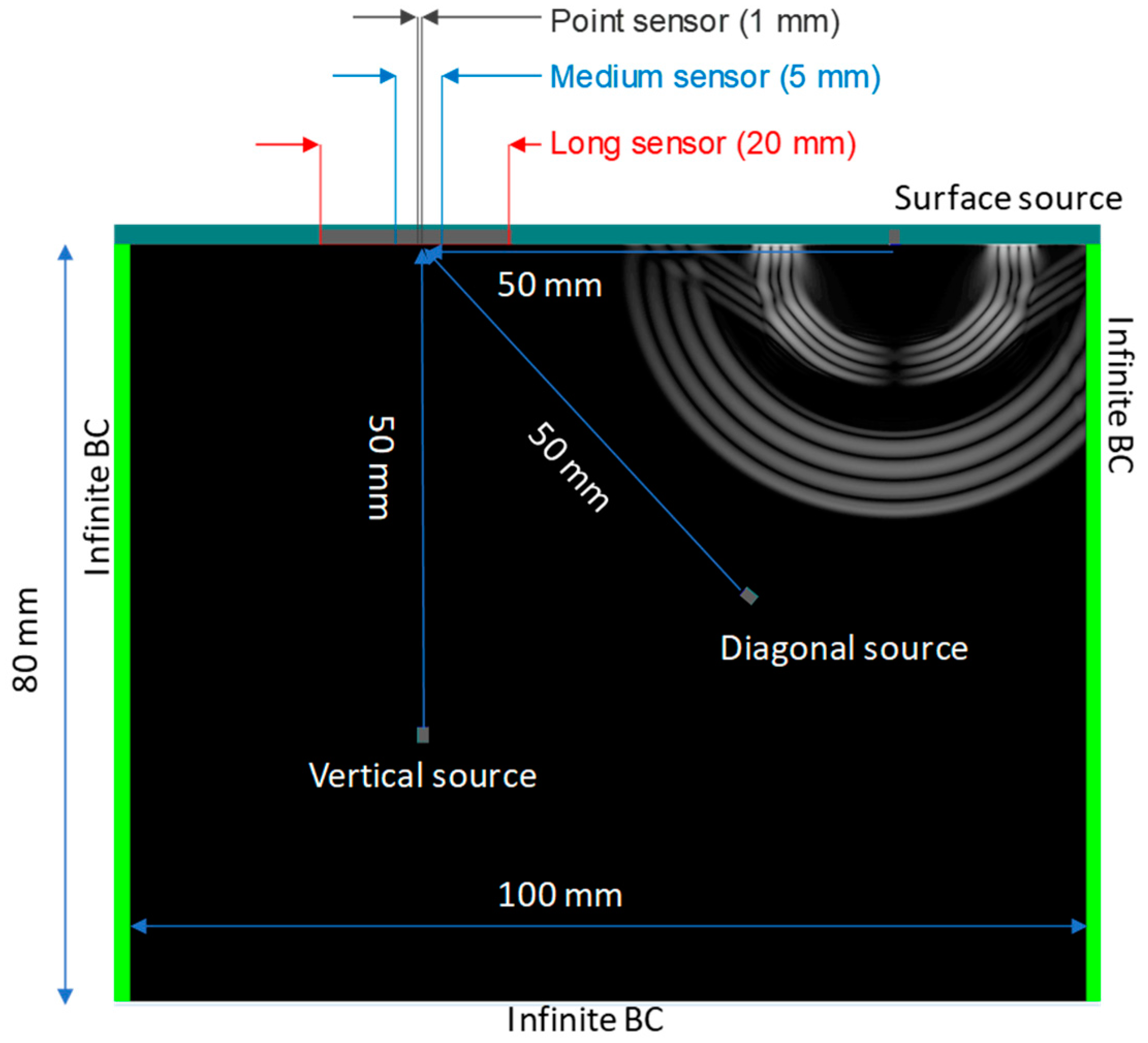
2. Numerical Simulation
3. Results
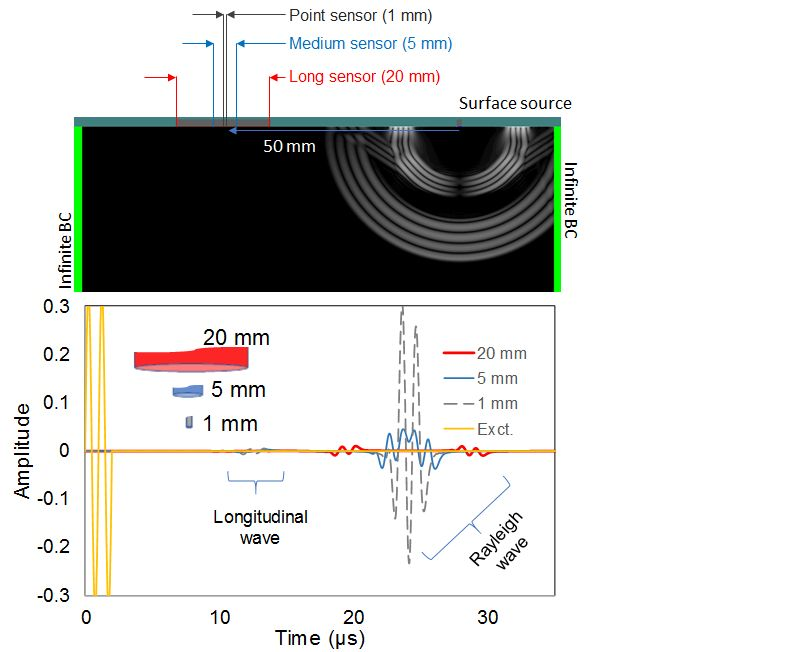
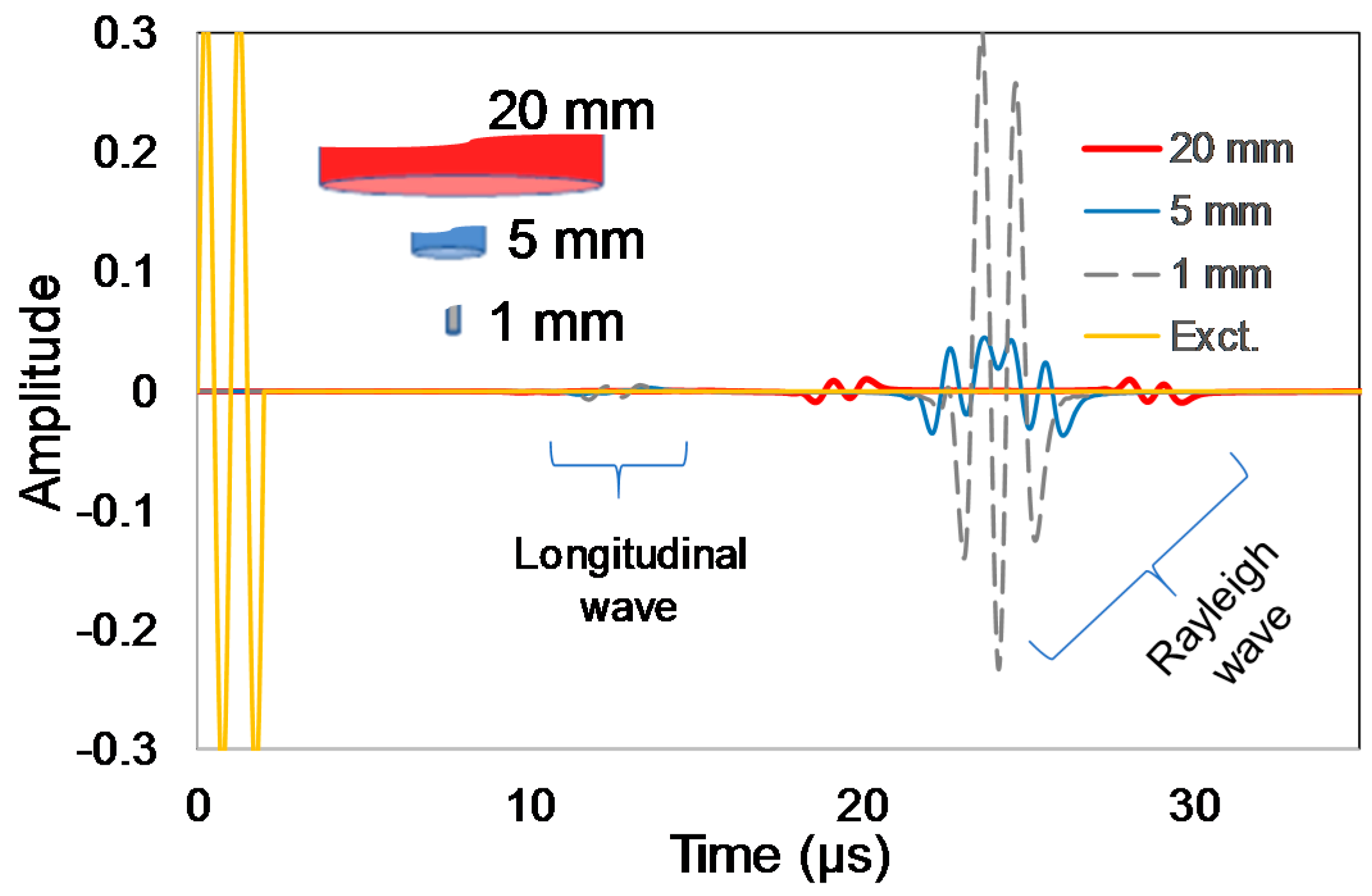
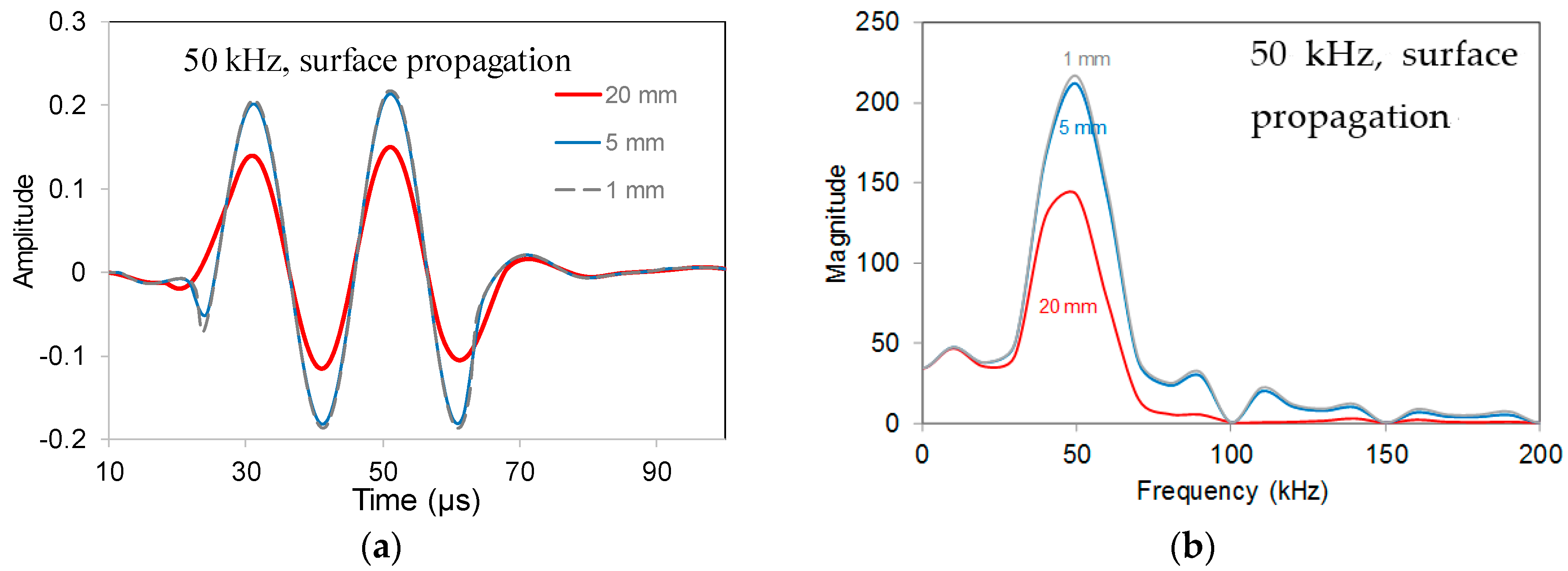
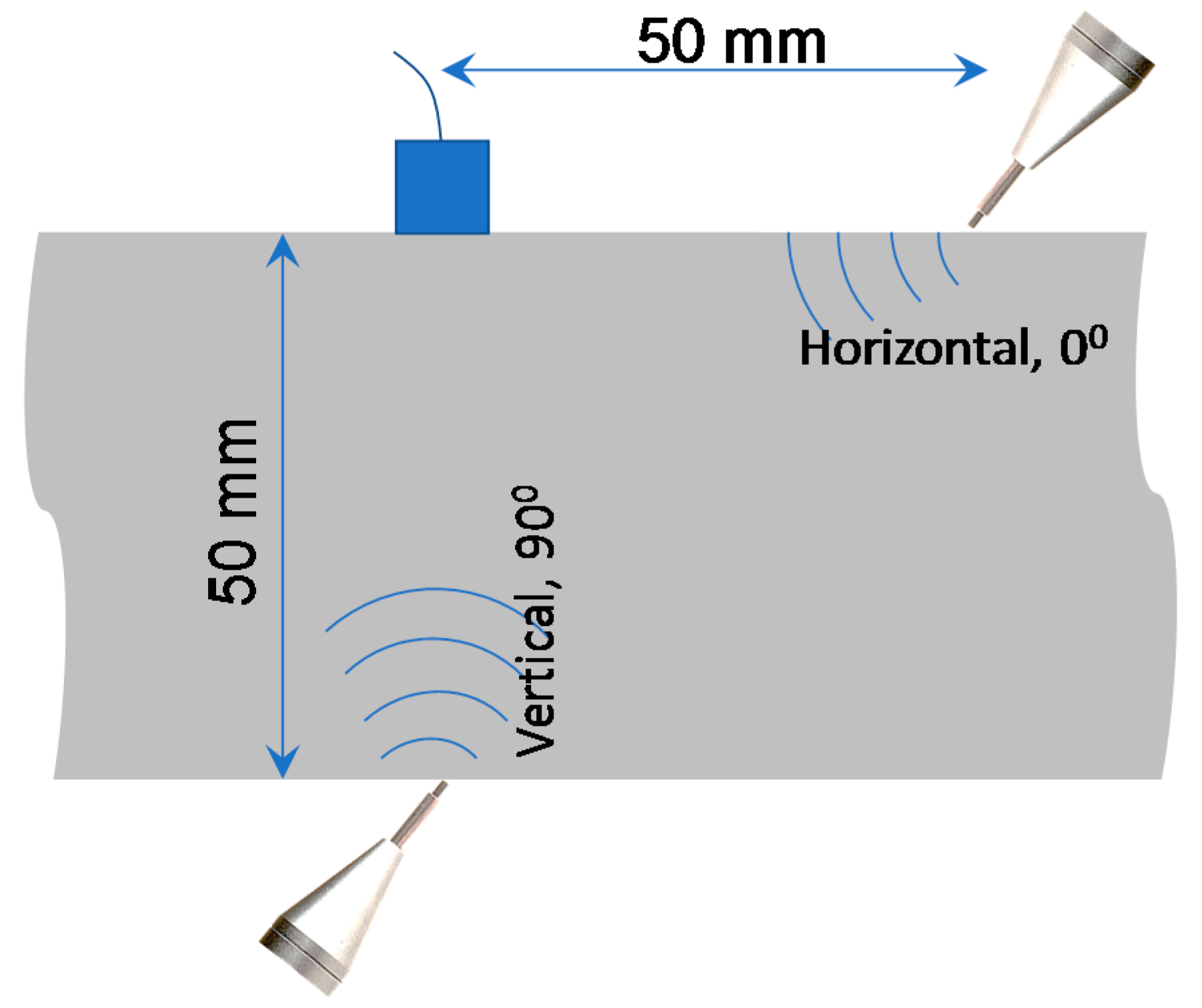
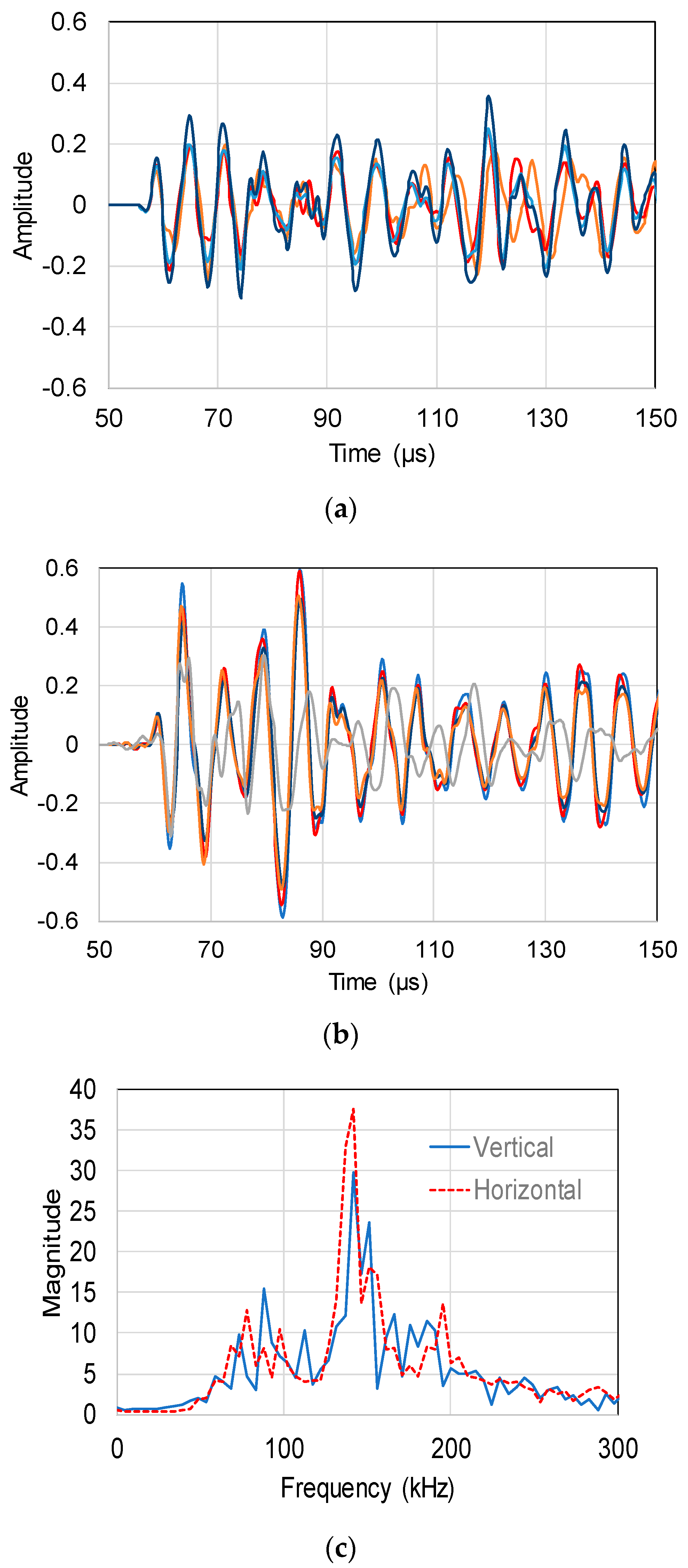
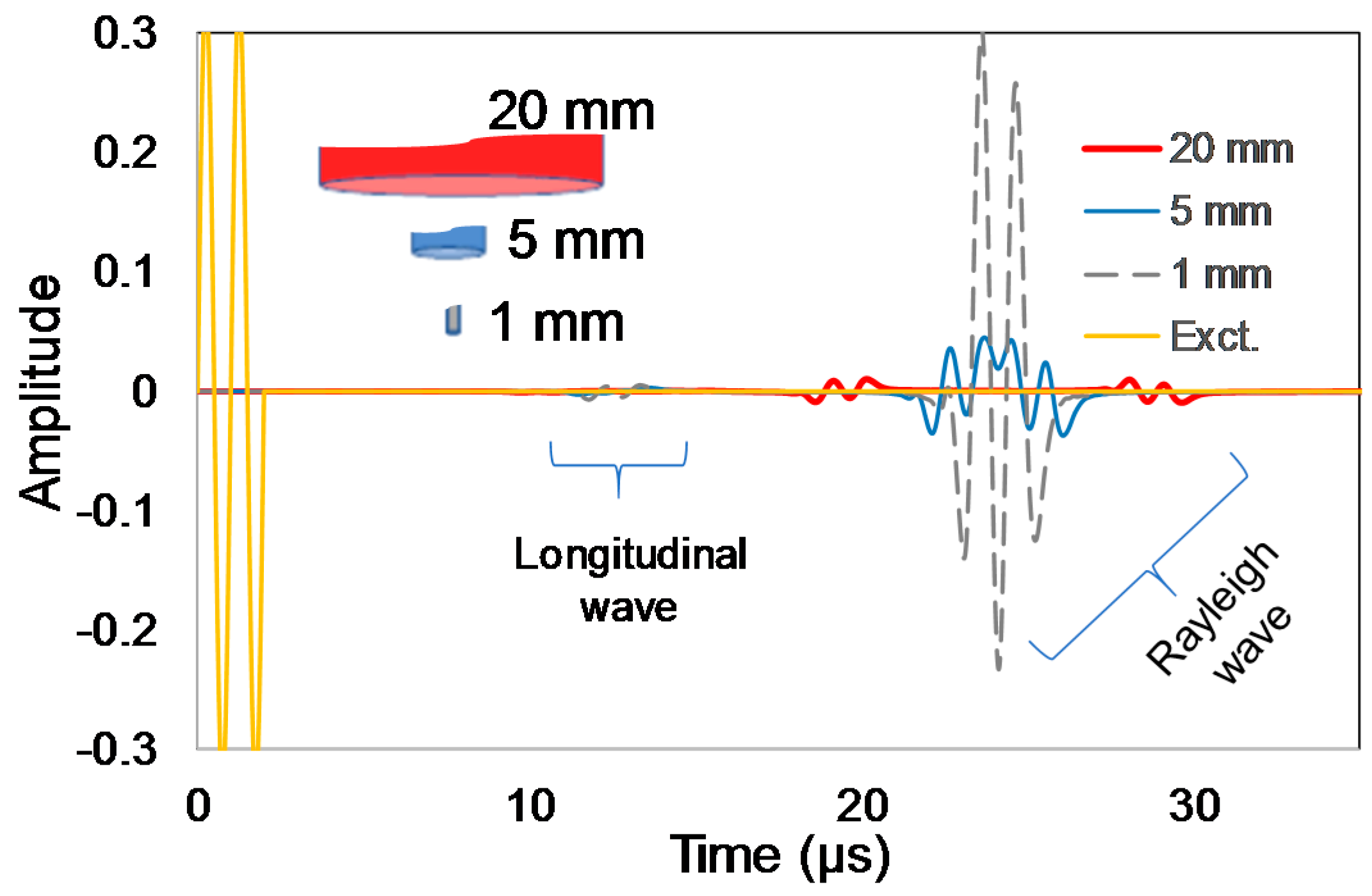
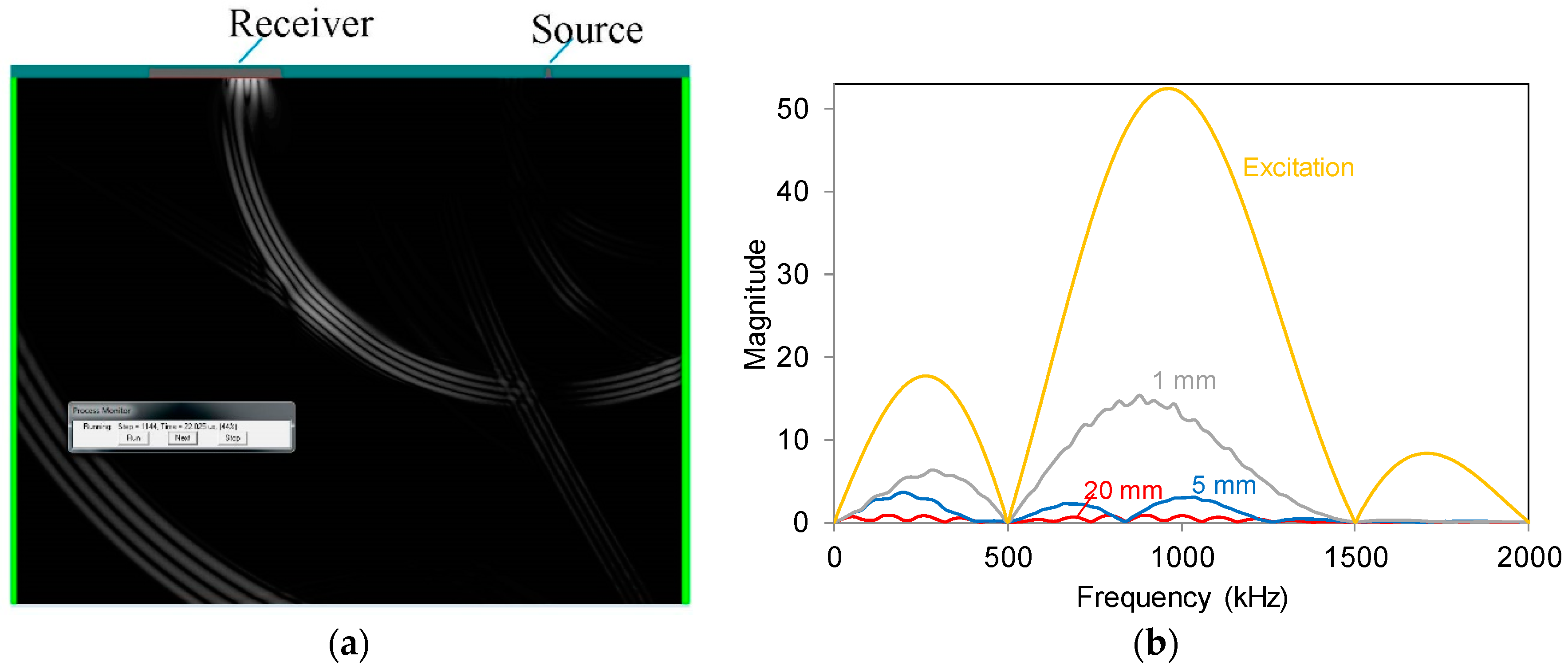
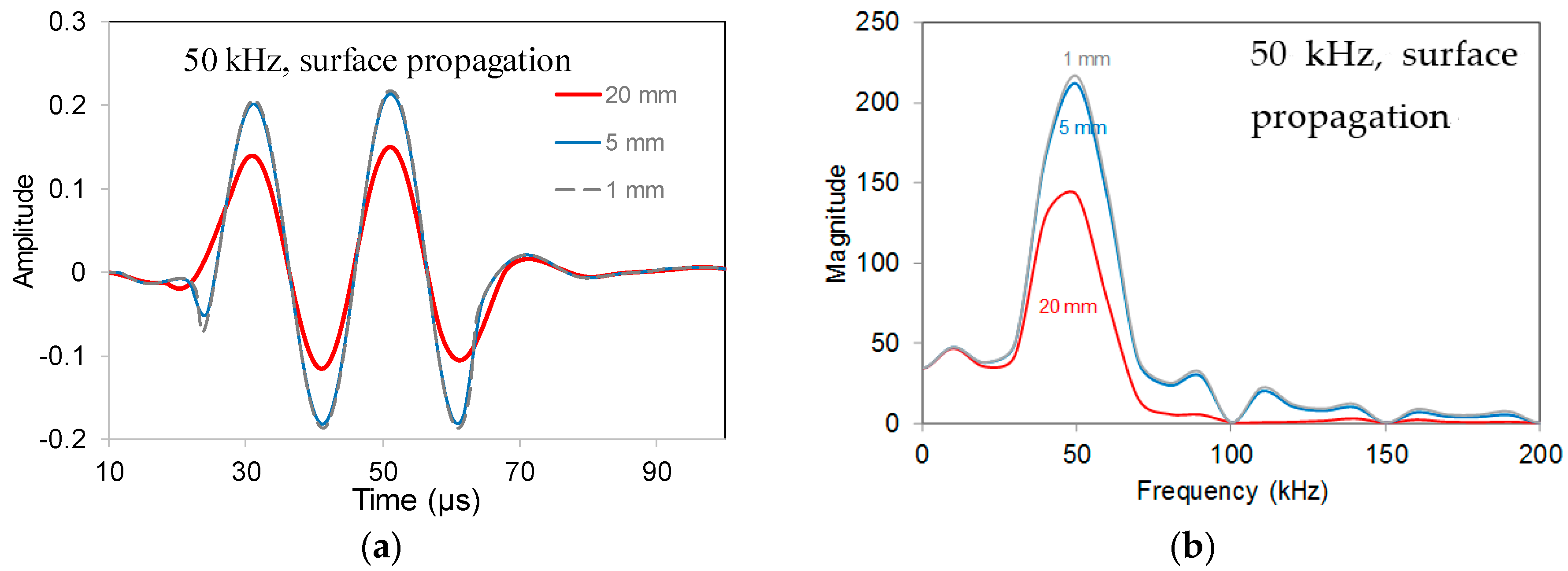
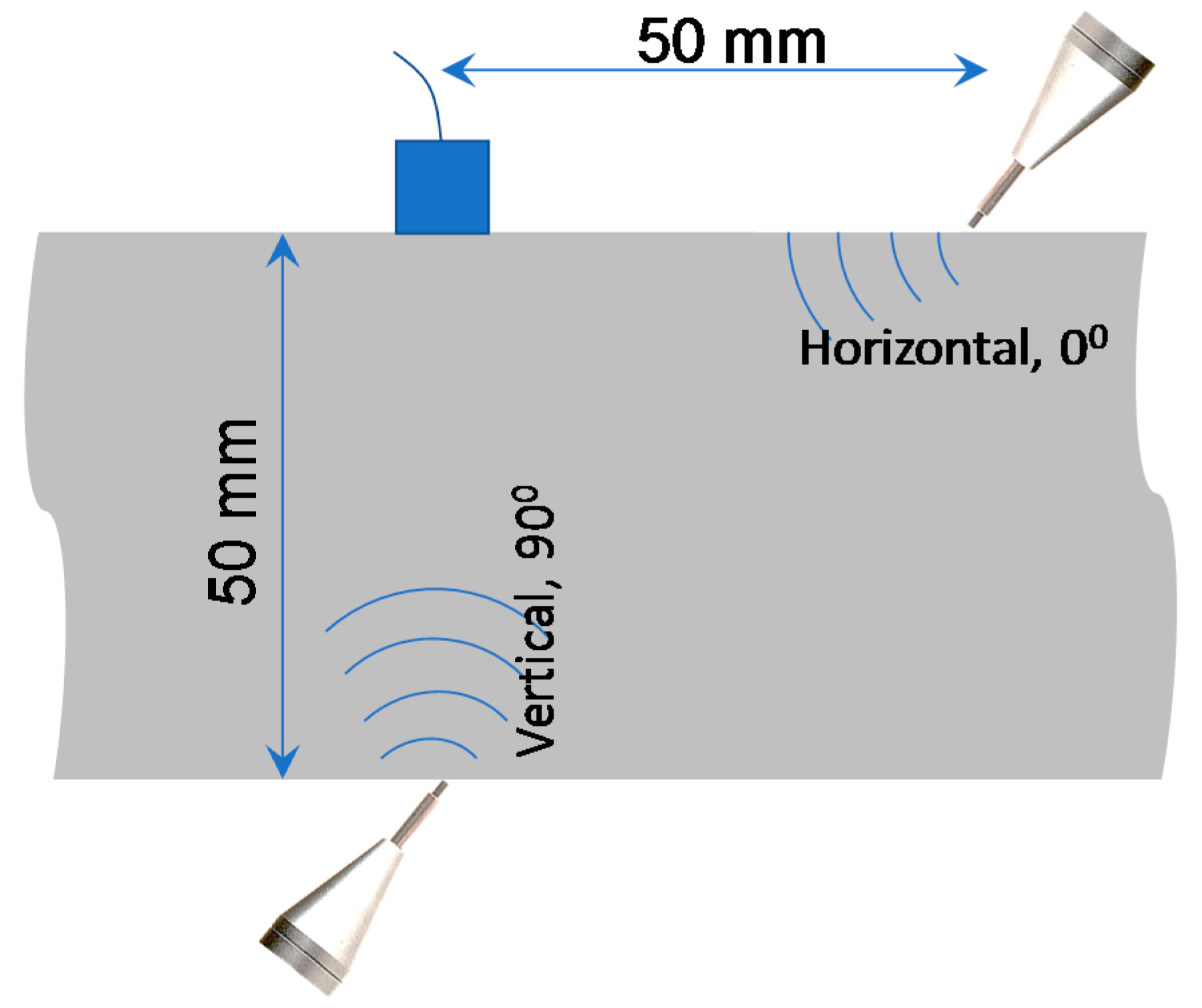
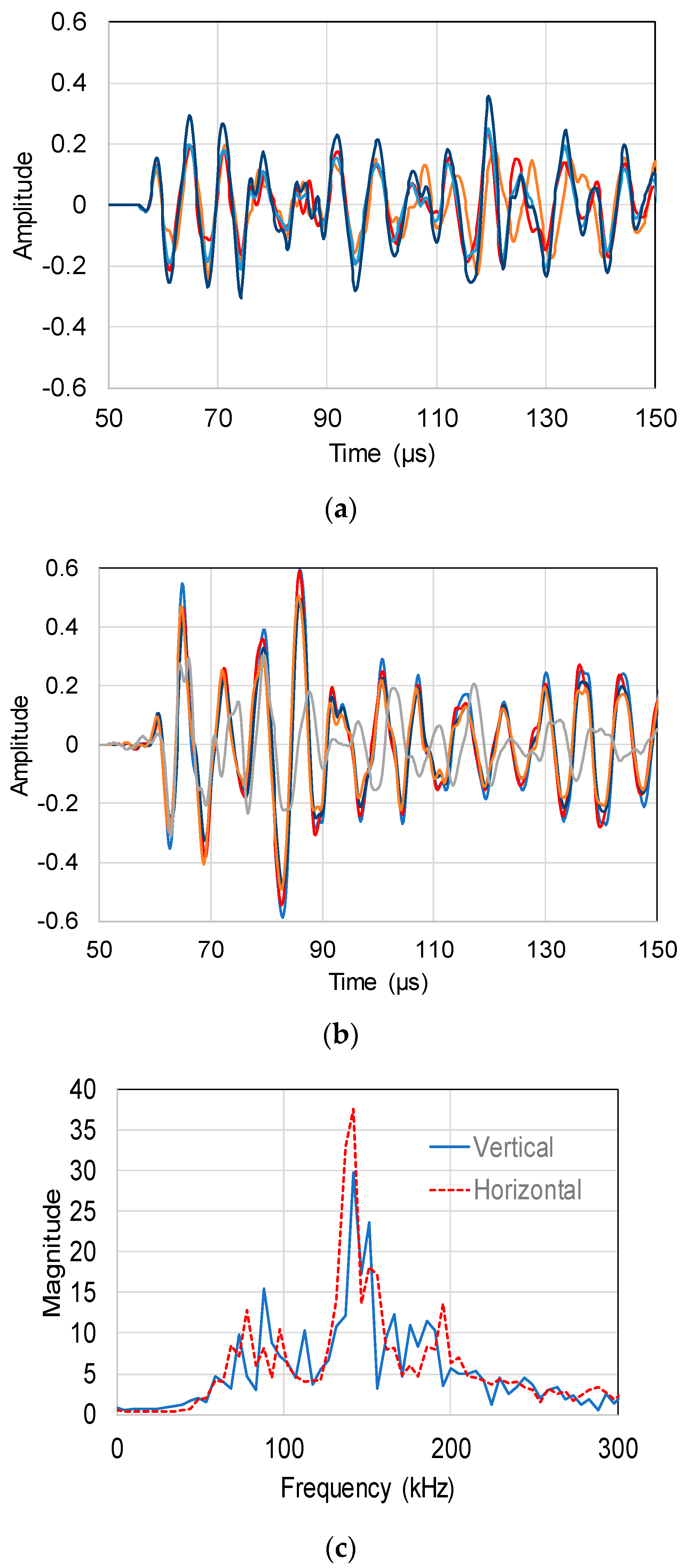
3.1. Surface Excitation
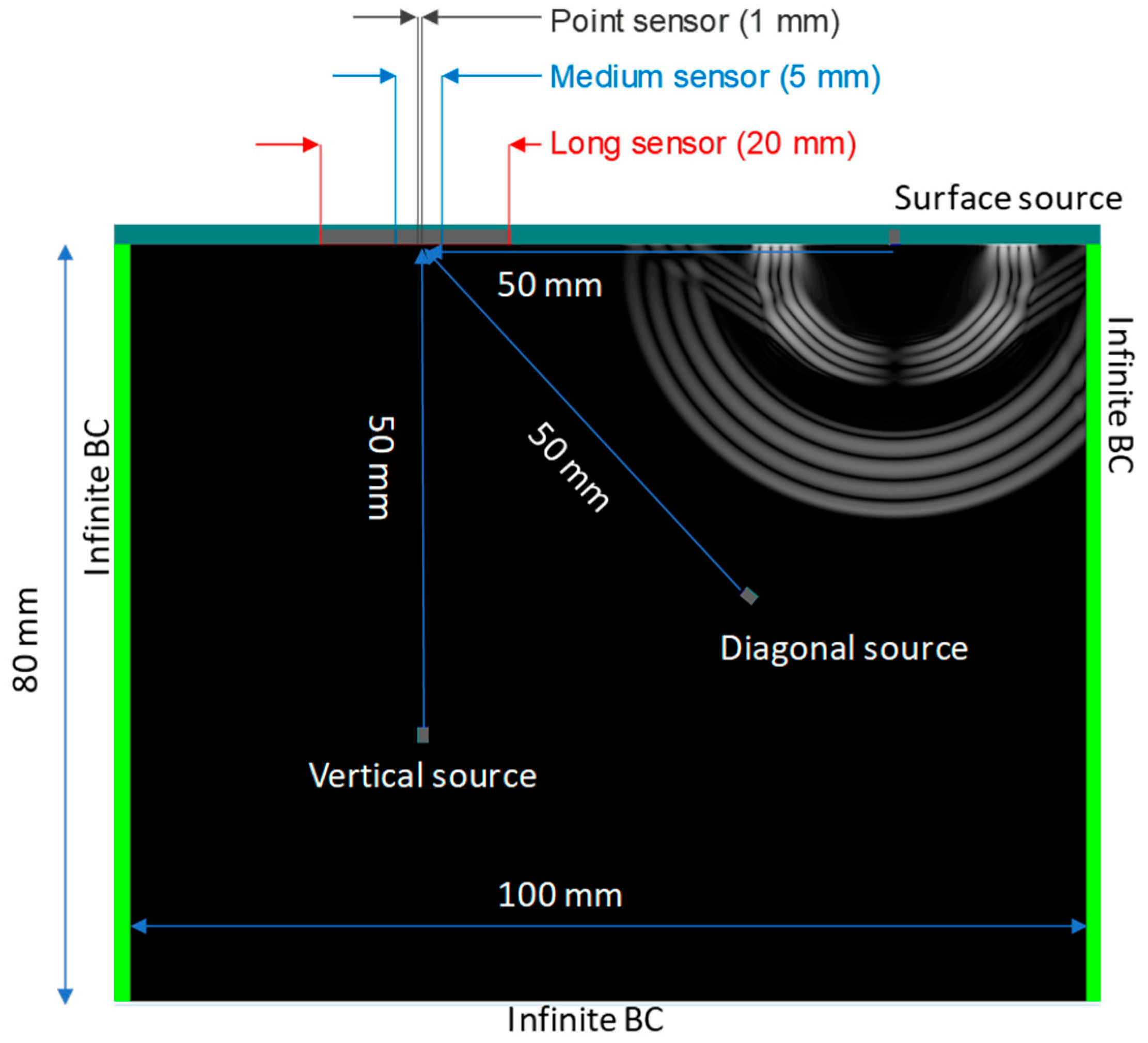
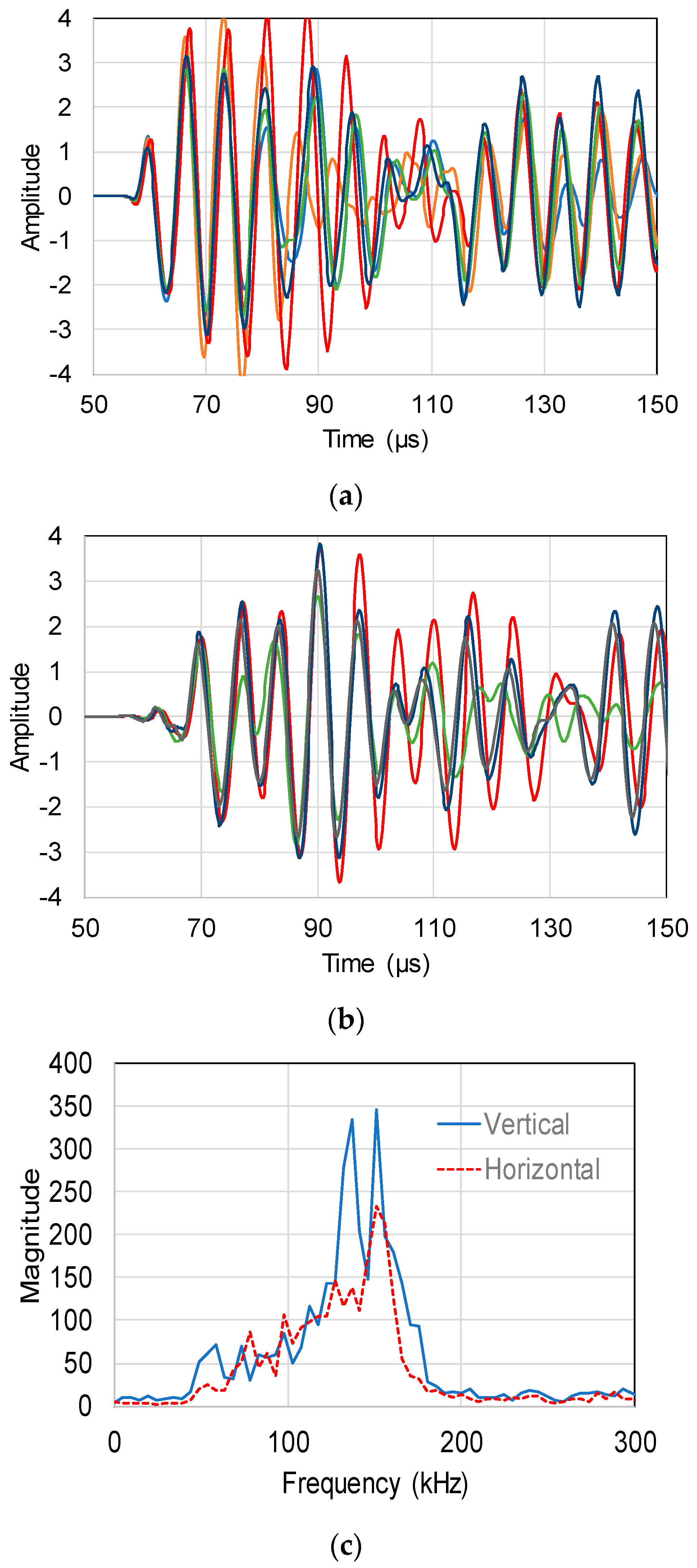
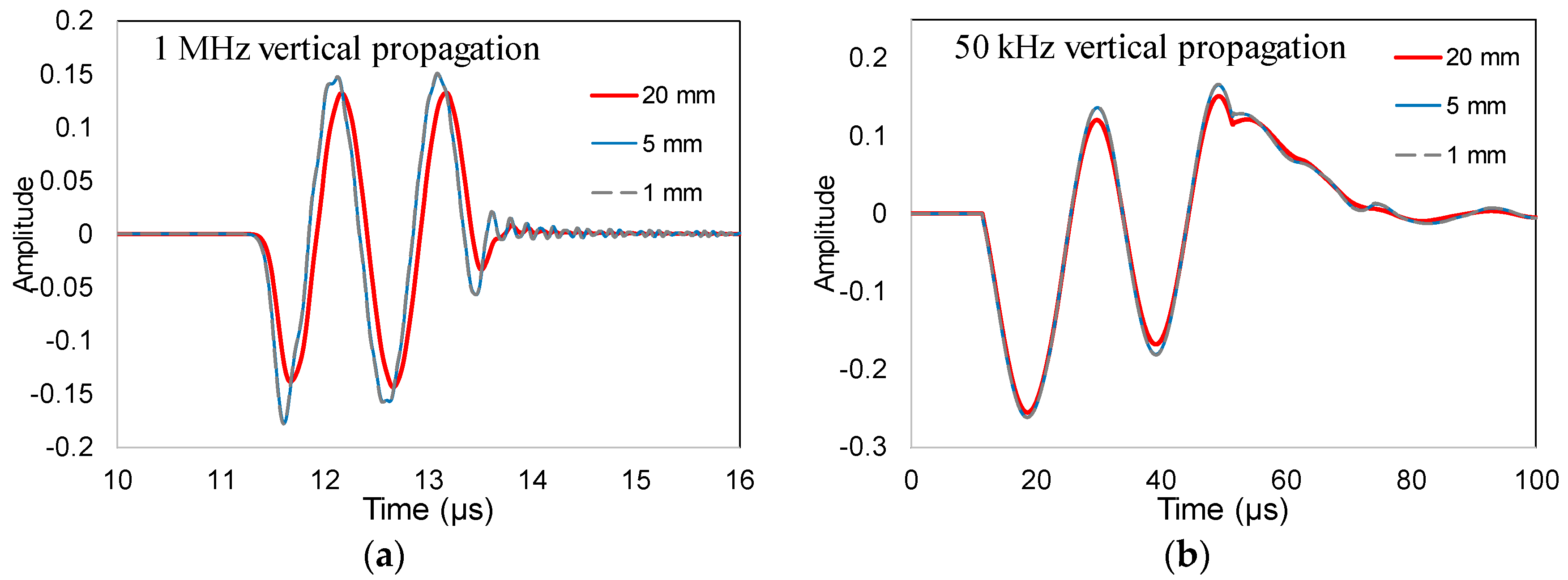
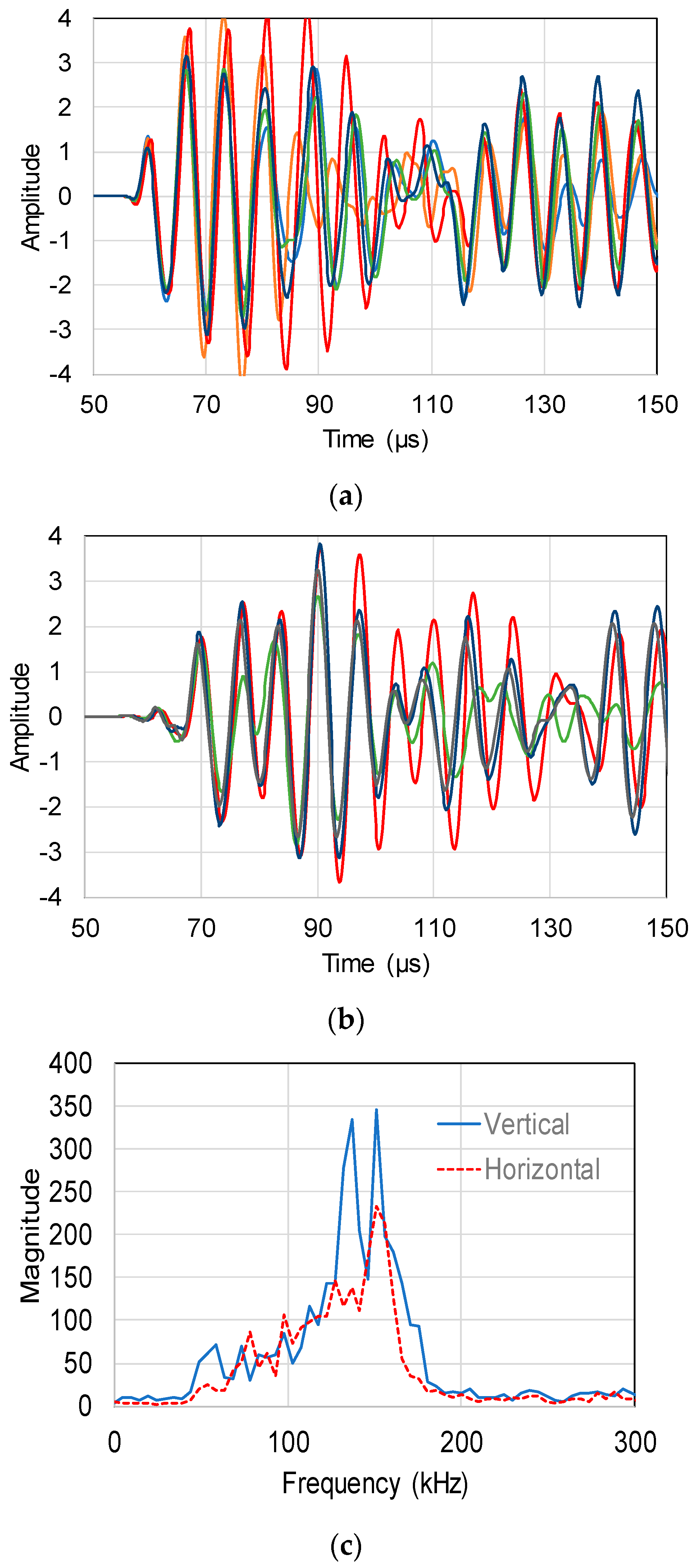
3.2. Vertical Excitation Beneath the Sensor
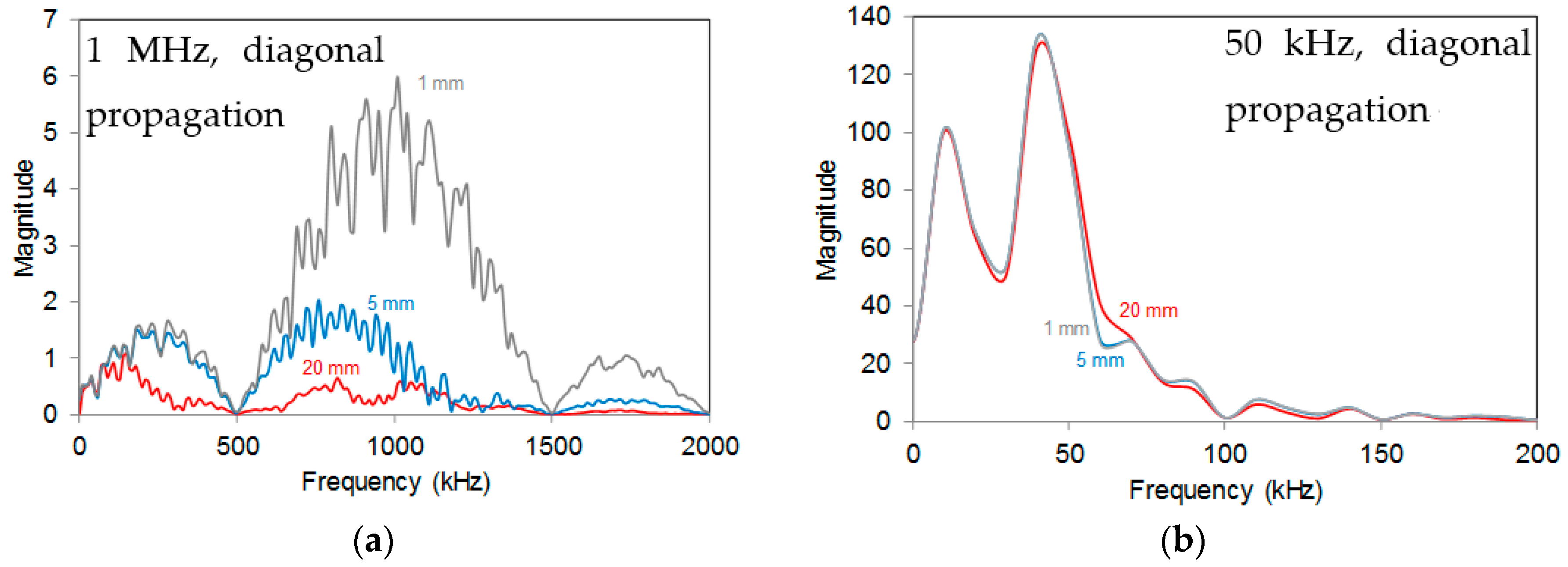
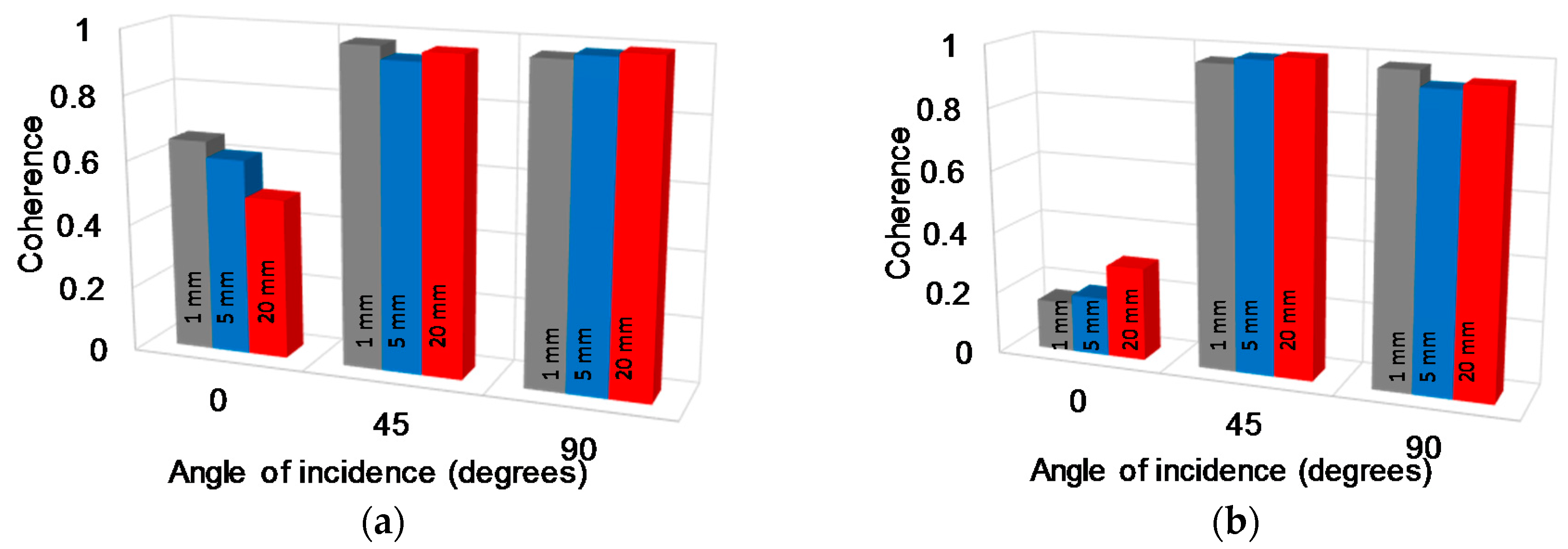
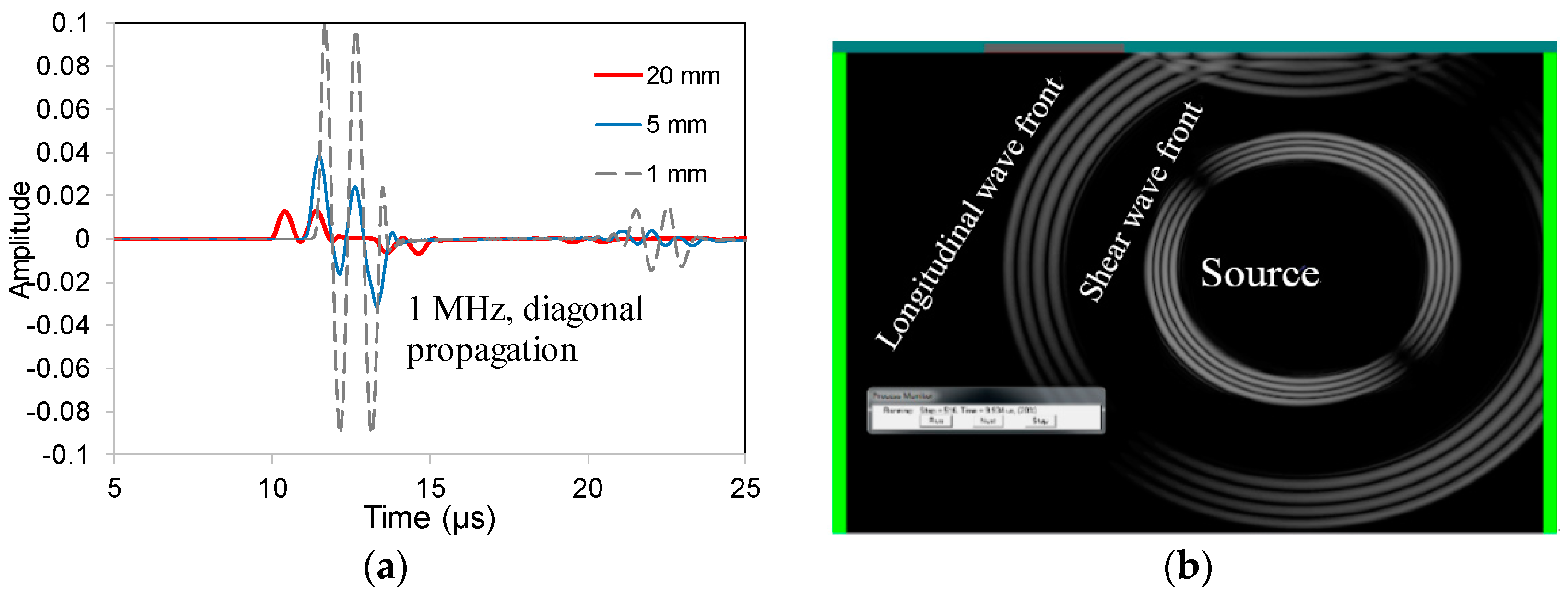
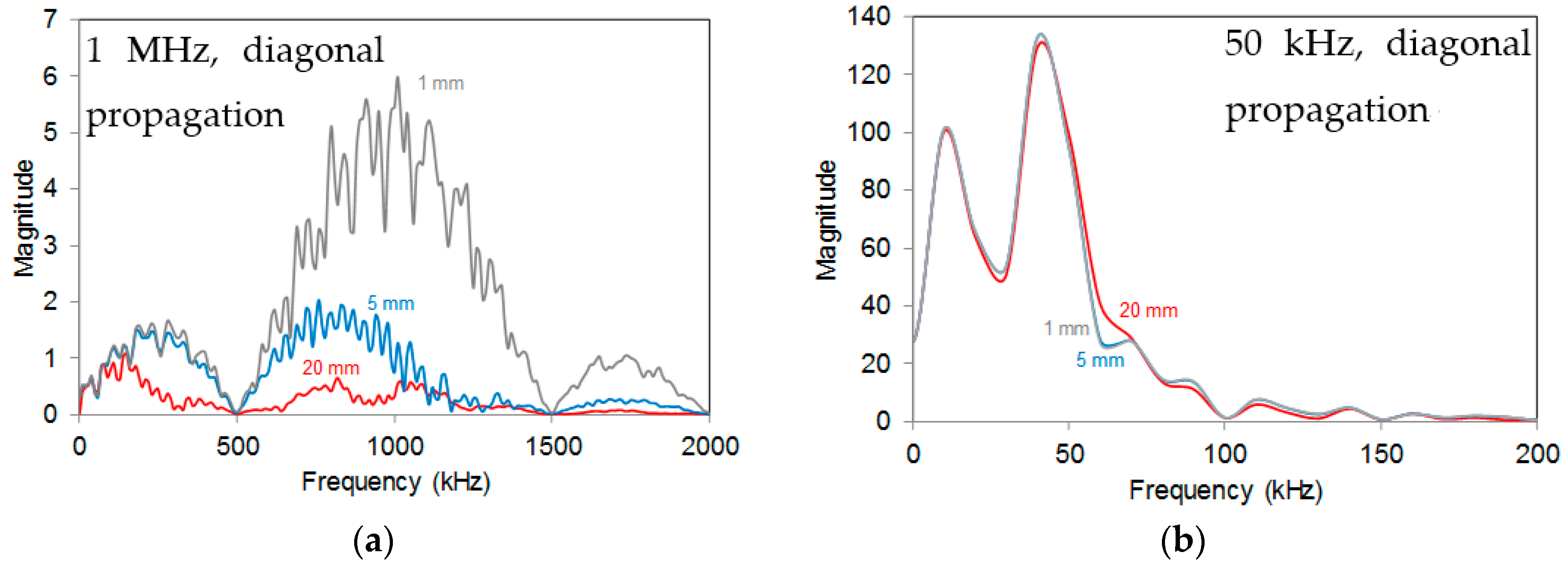
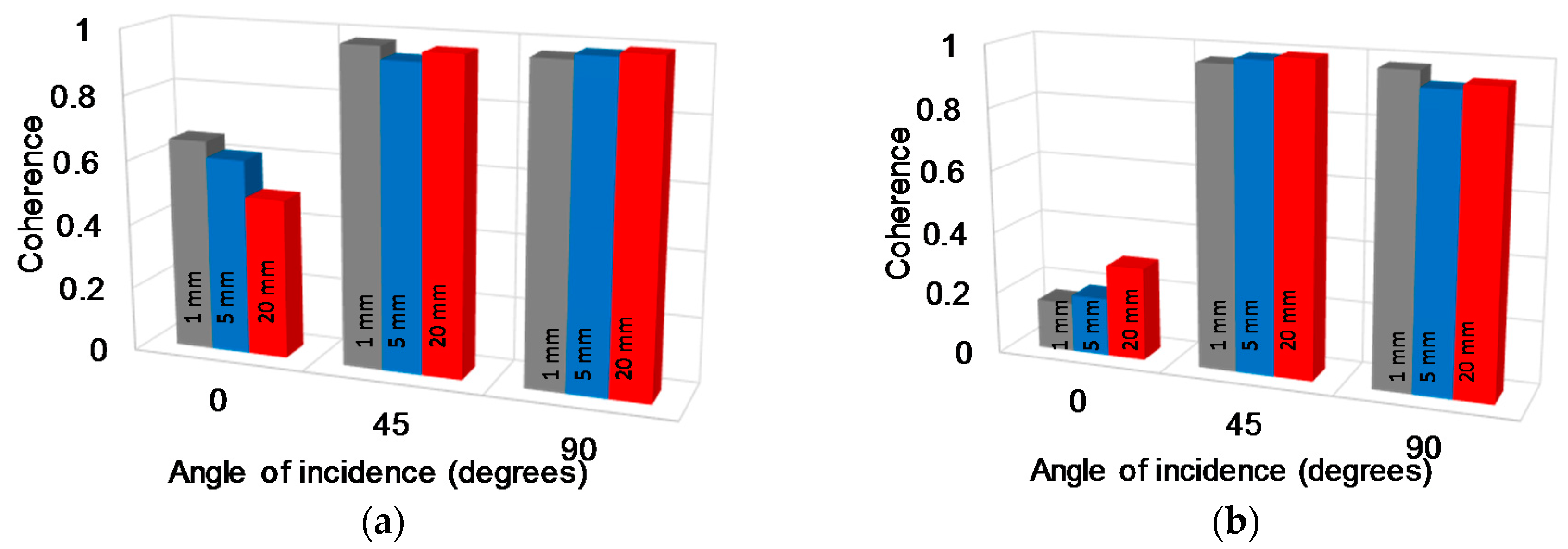
3.3. Diagonal Excitation
4. Discussion
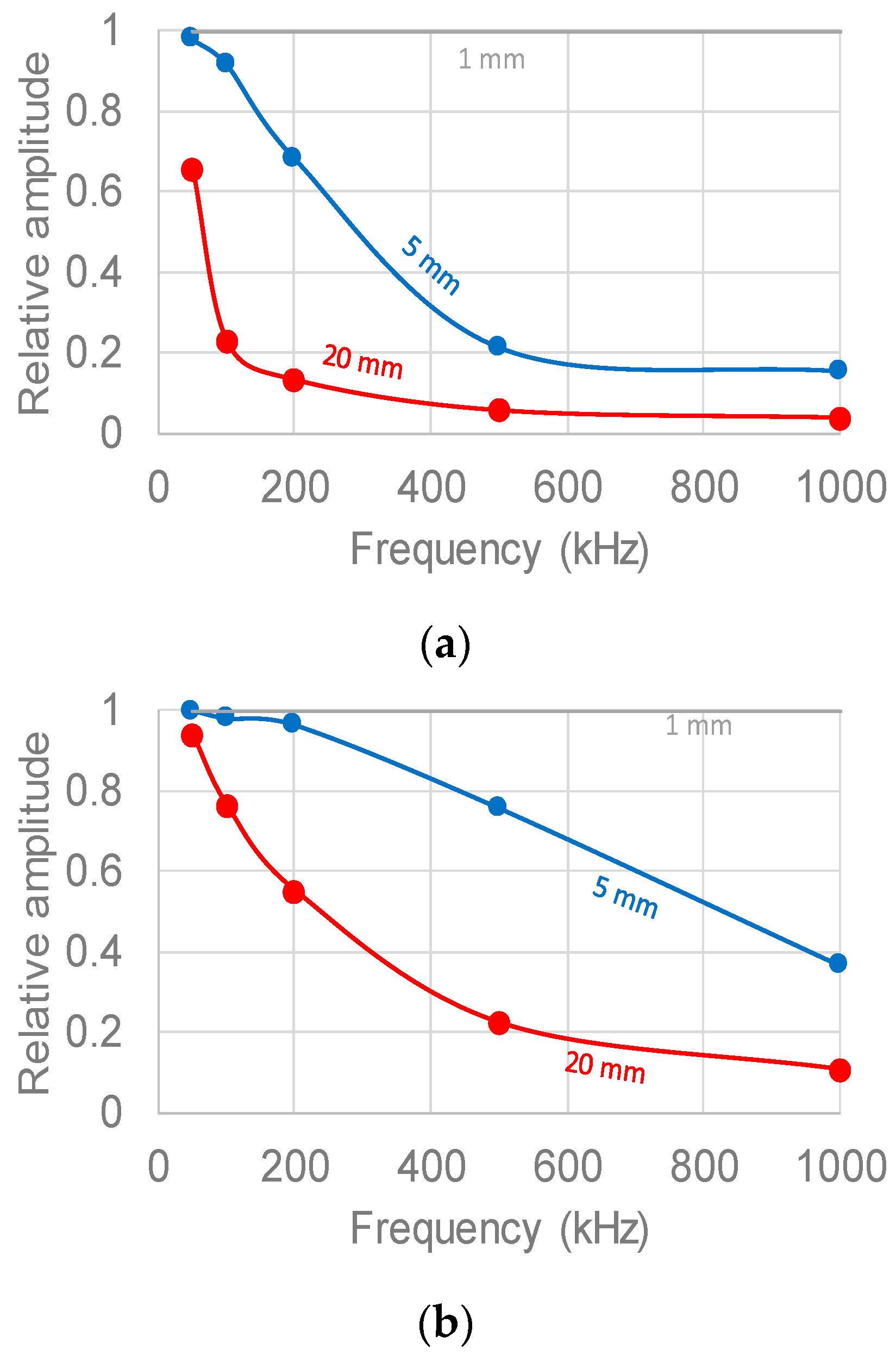
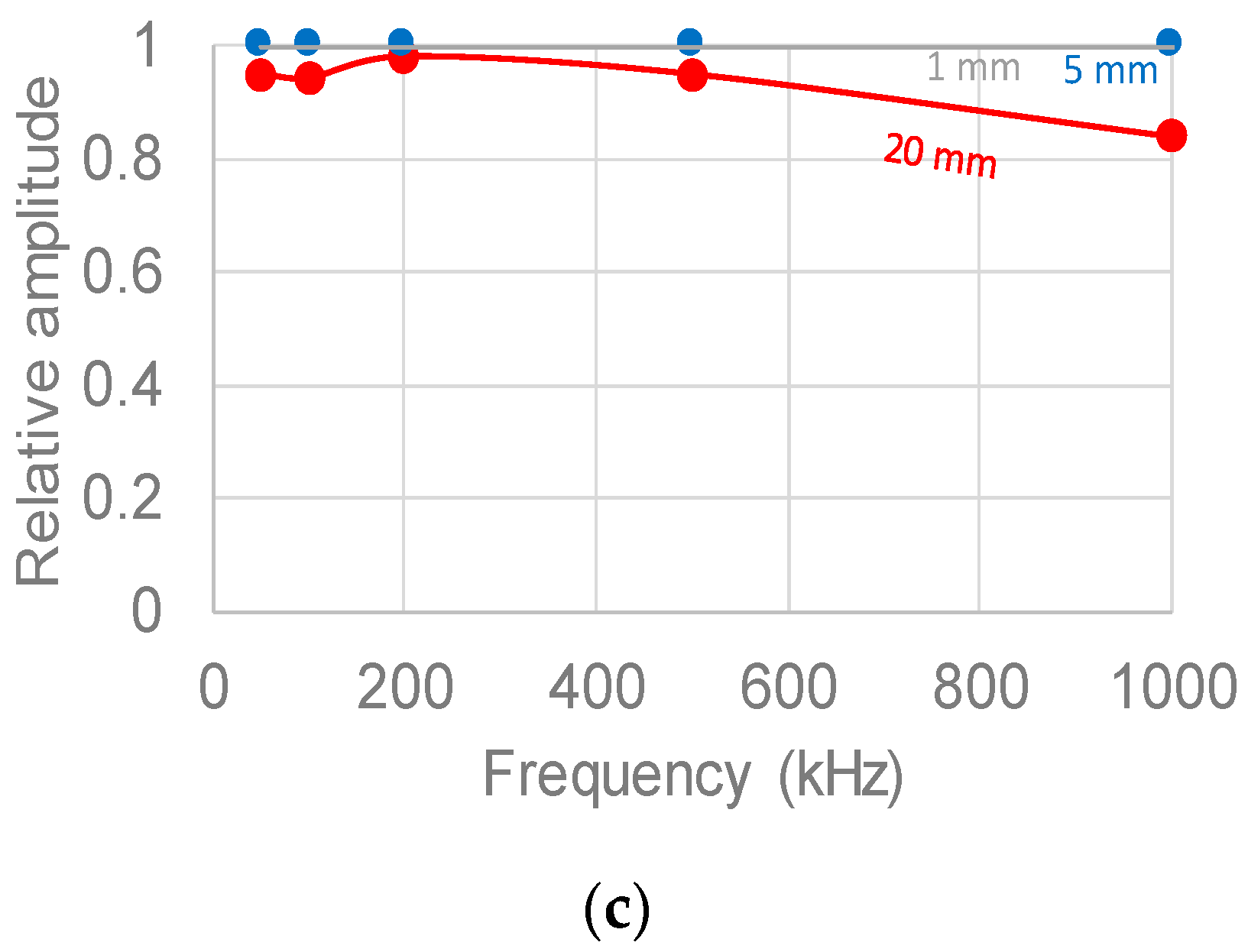
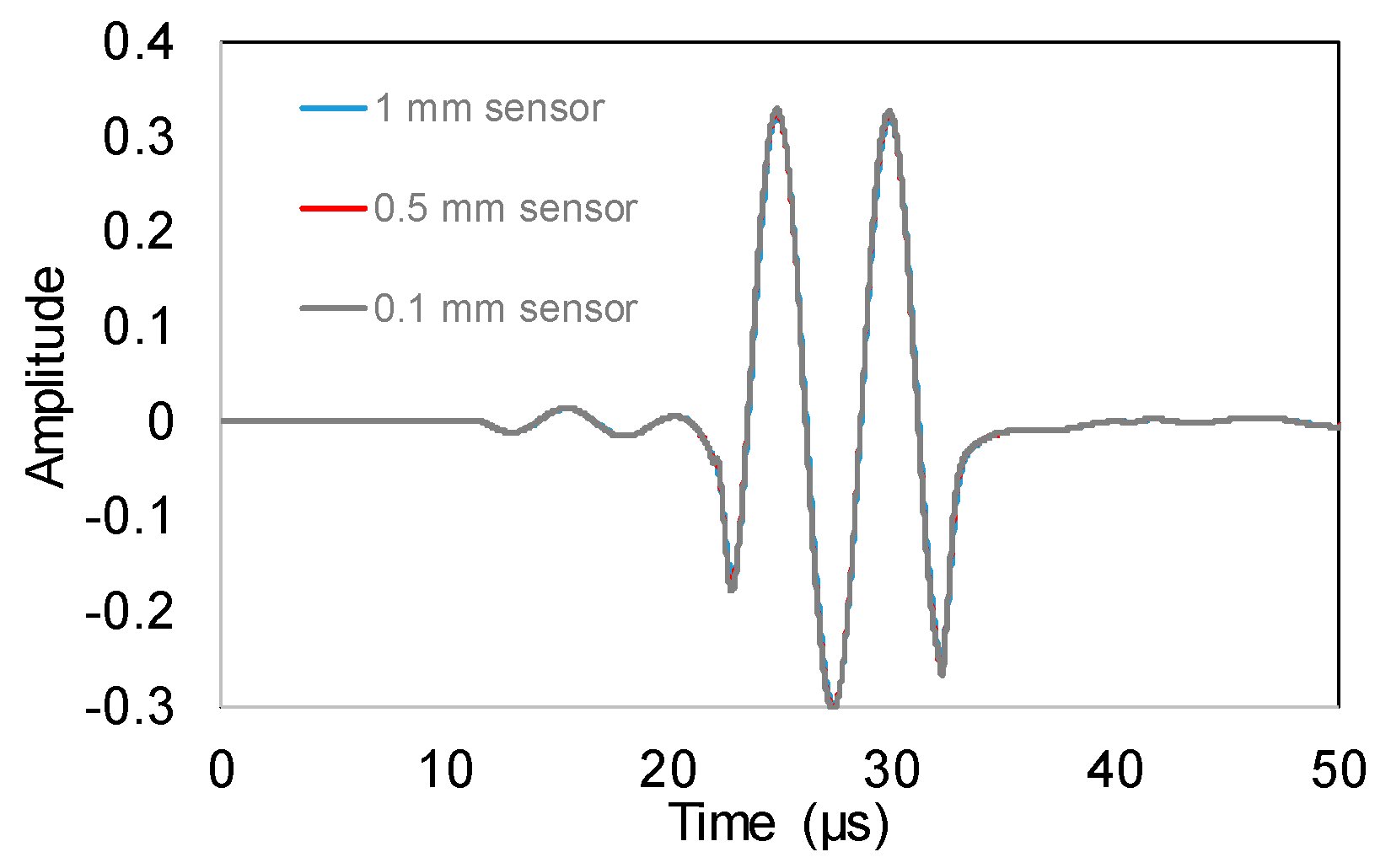
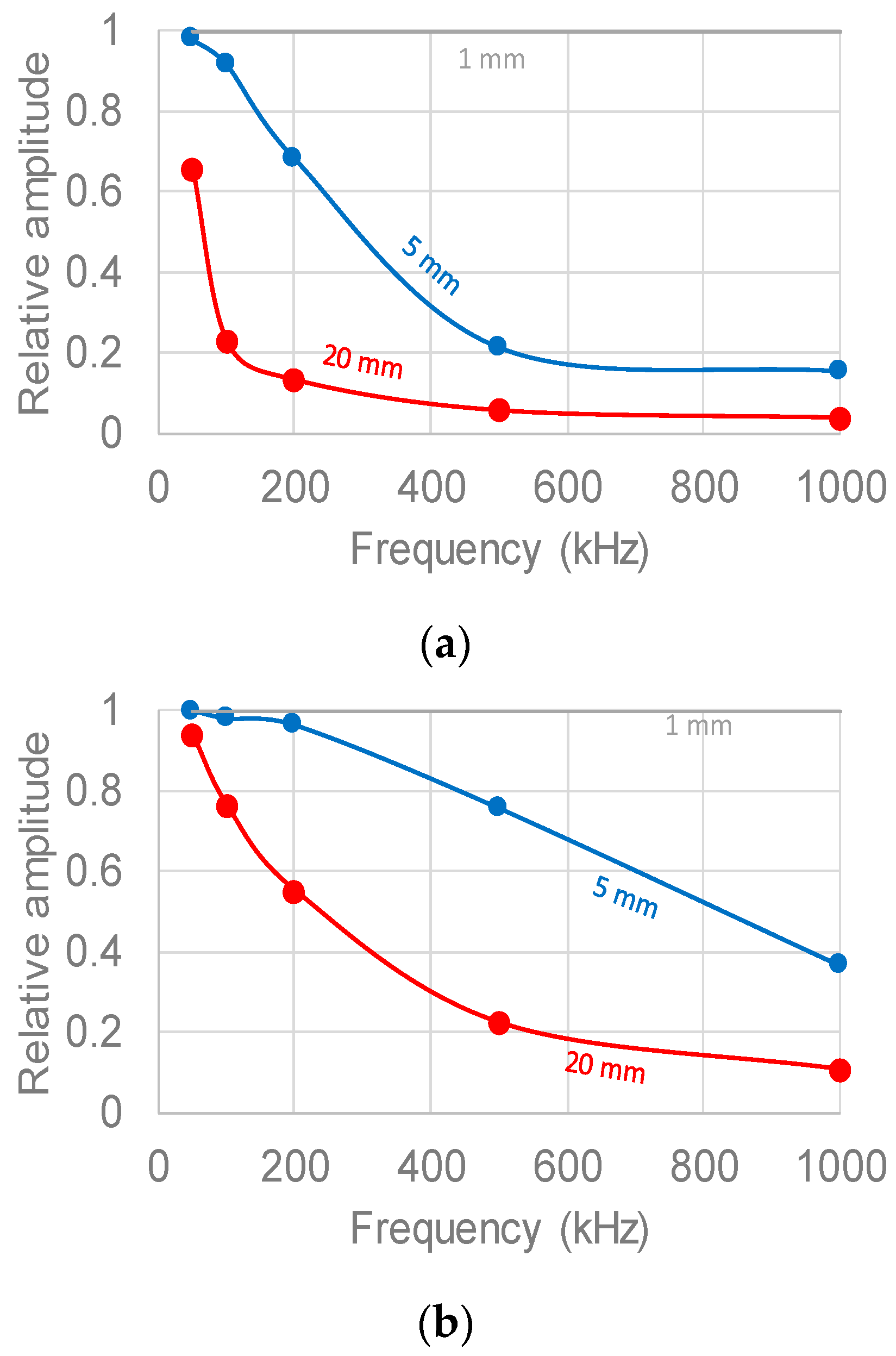
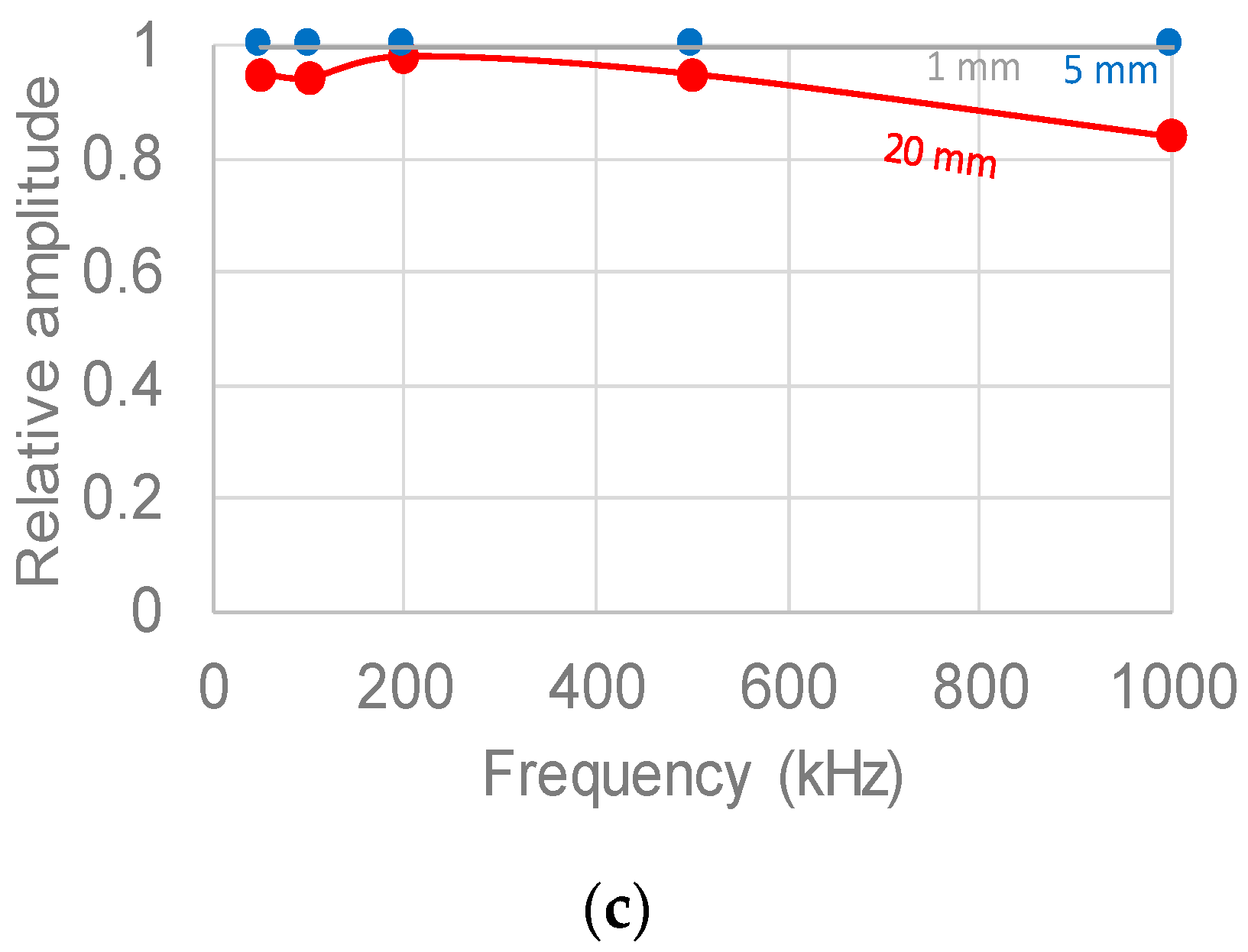
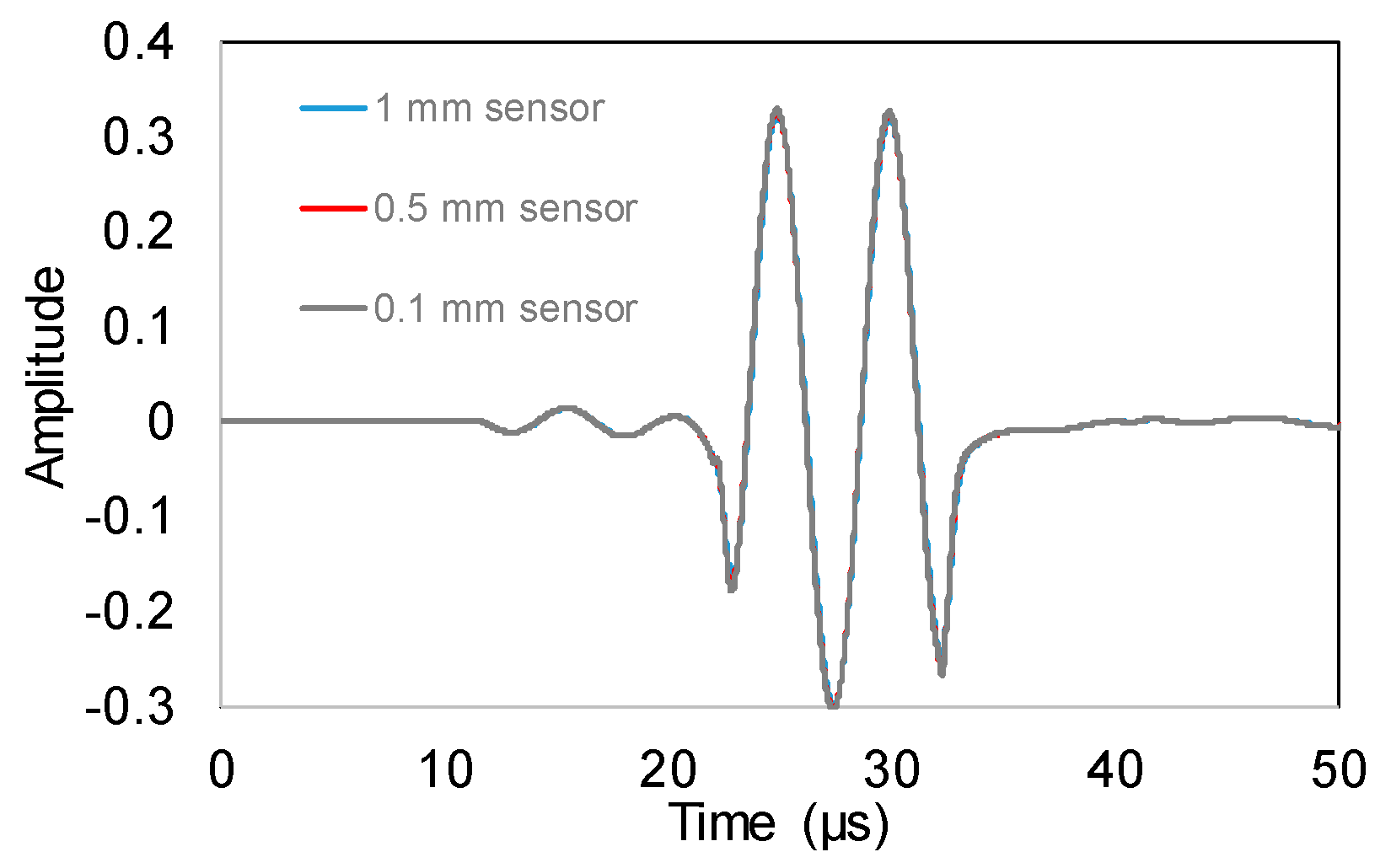
4.1. Impact of Sensor Size on Signal Amplitude
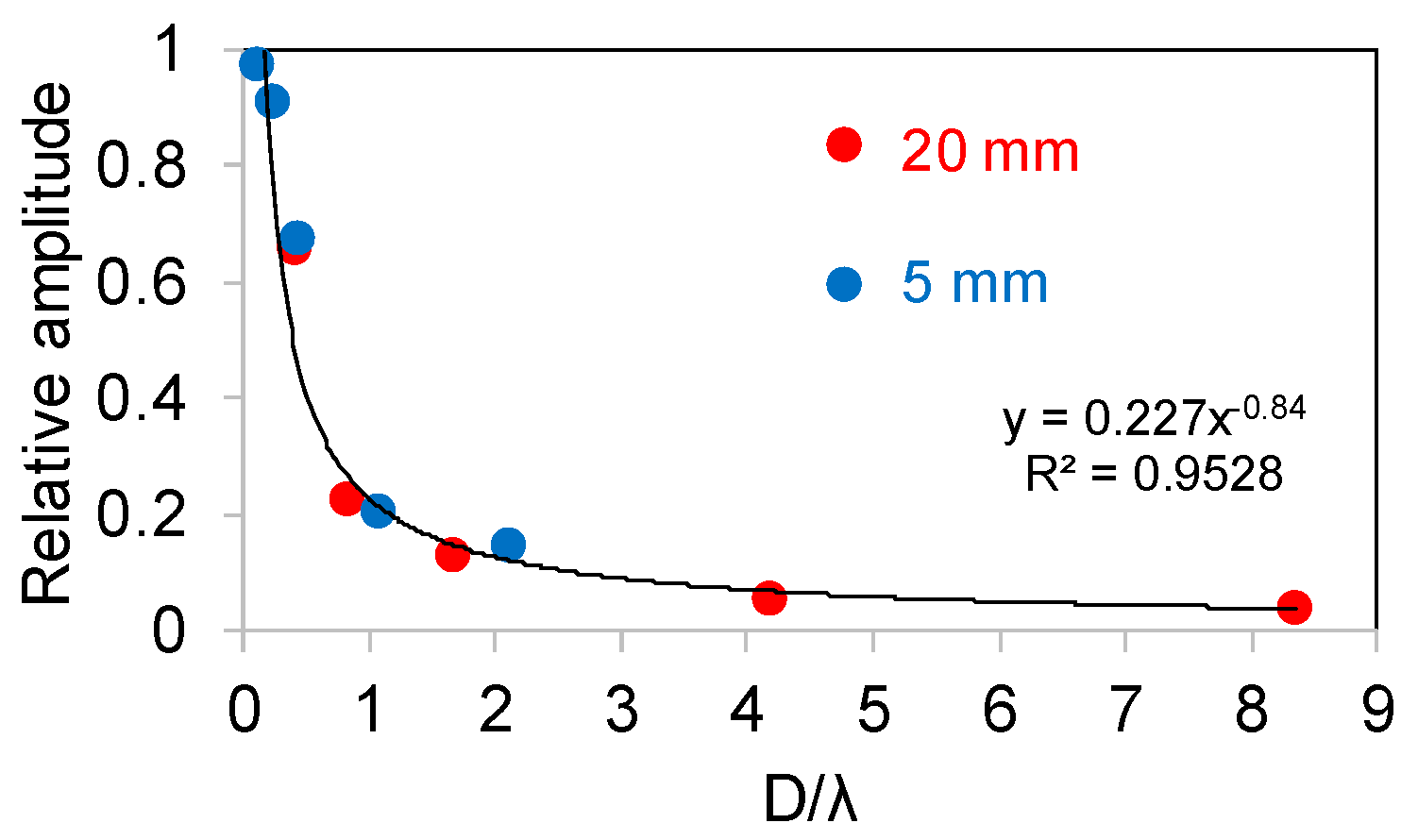
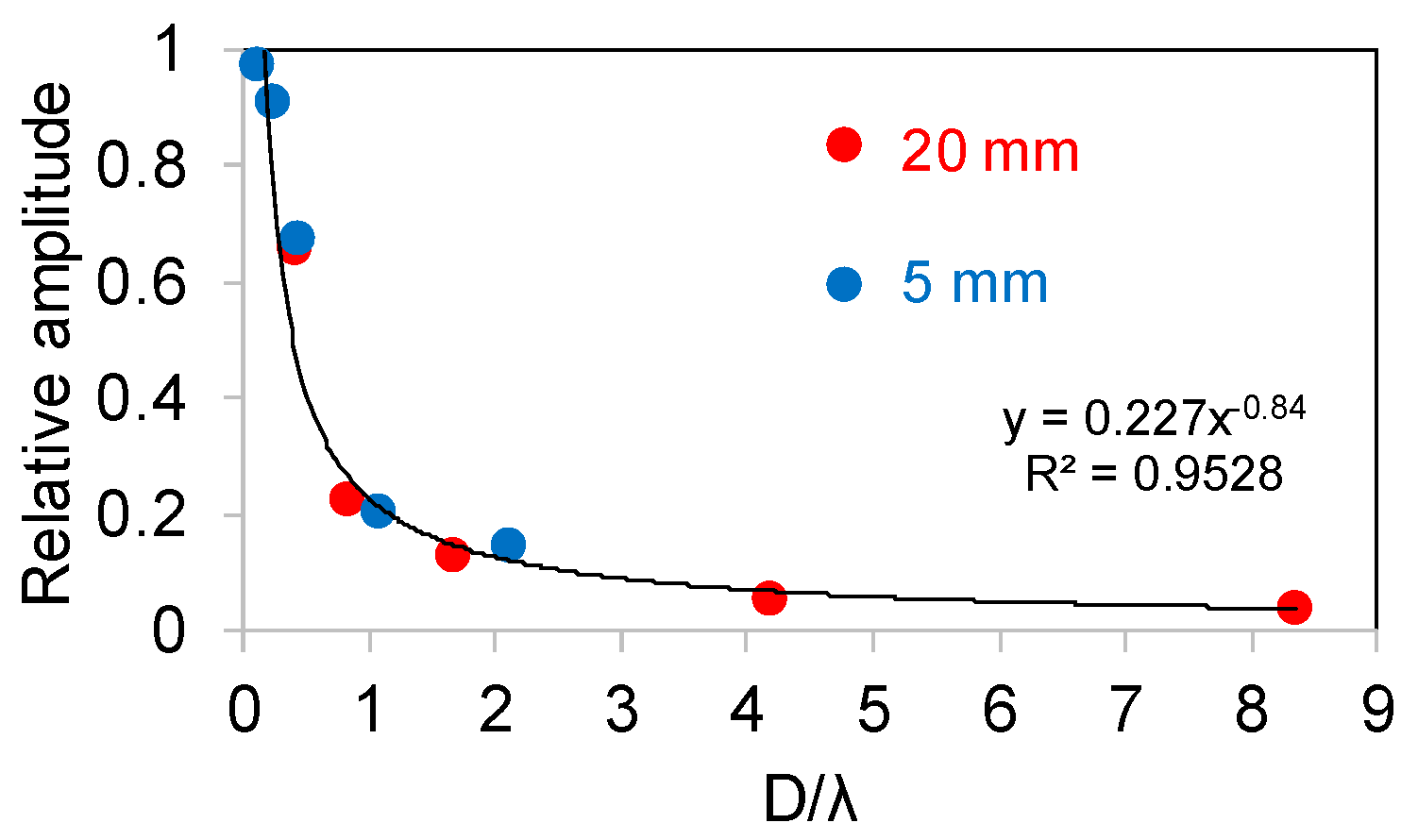
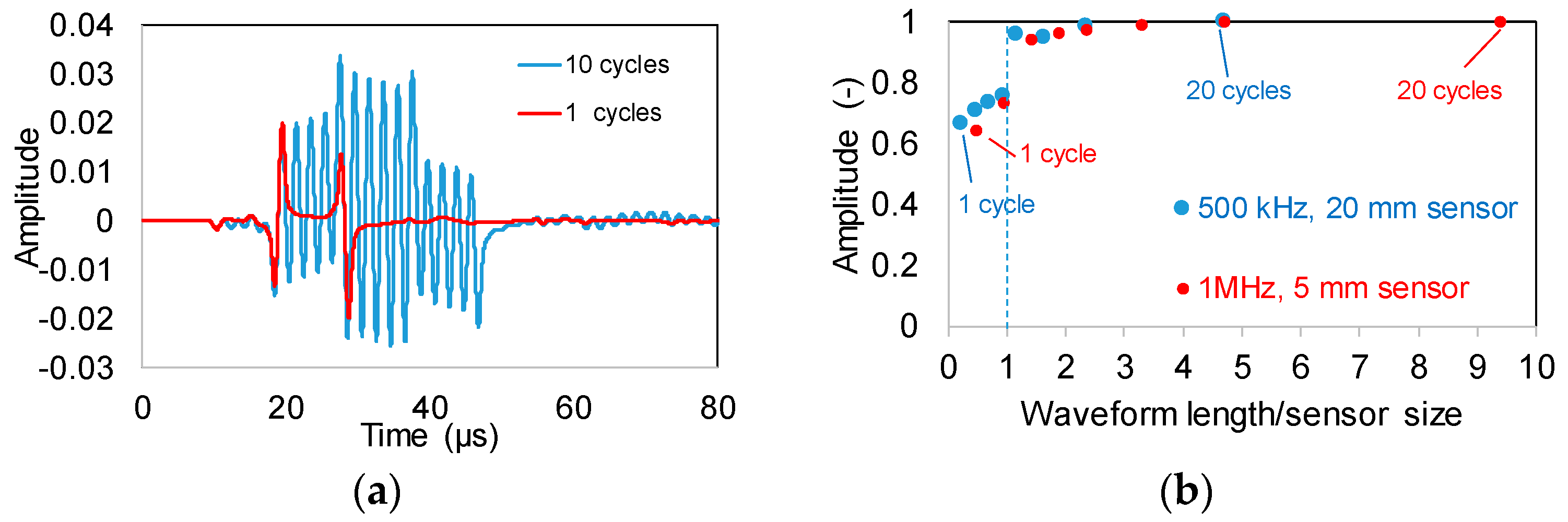
4.2. Effect of Wavelength over Sensor Size
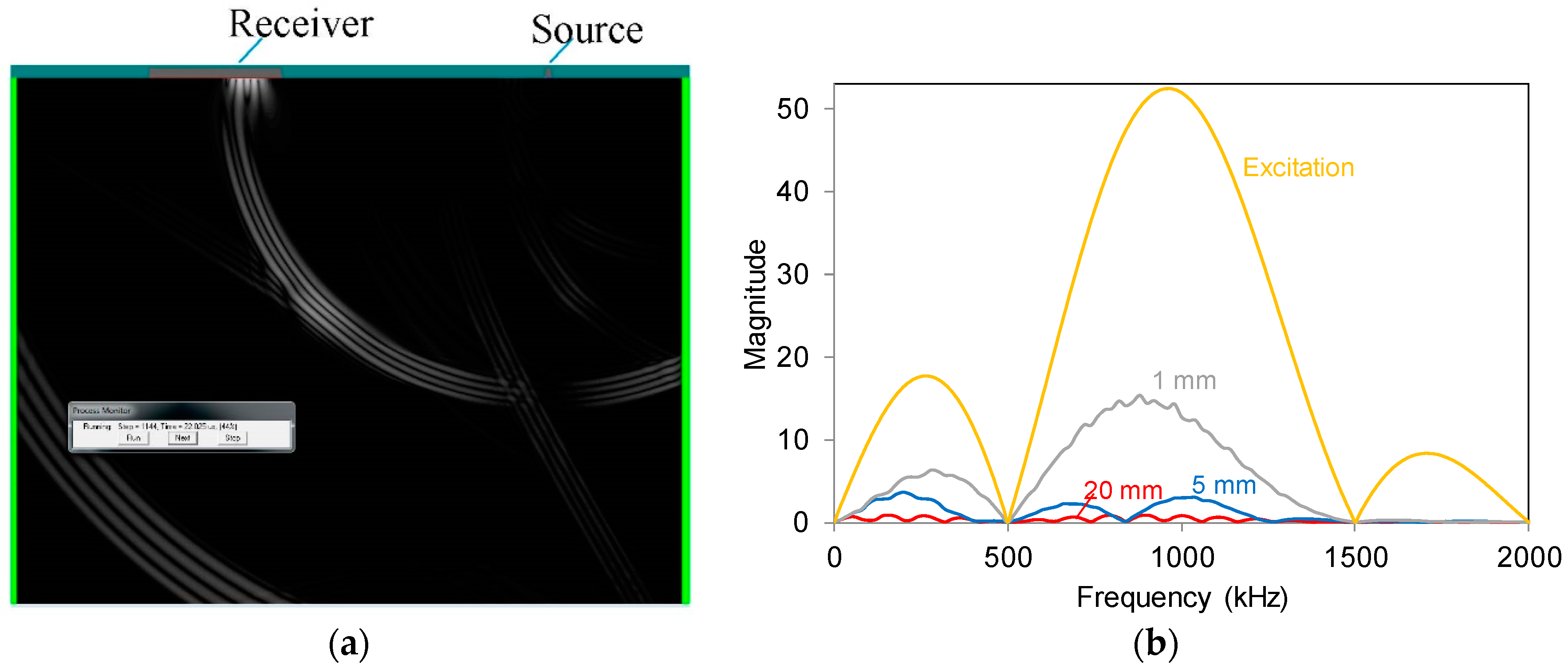
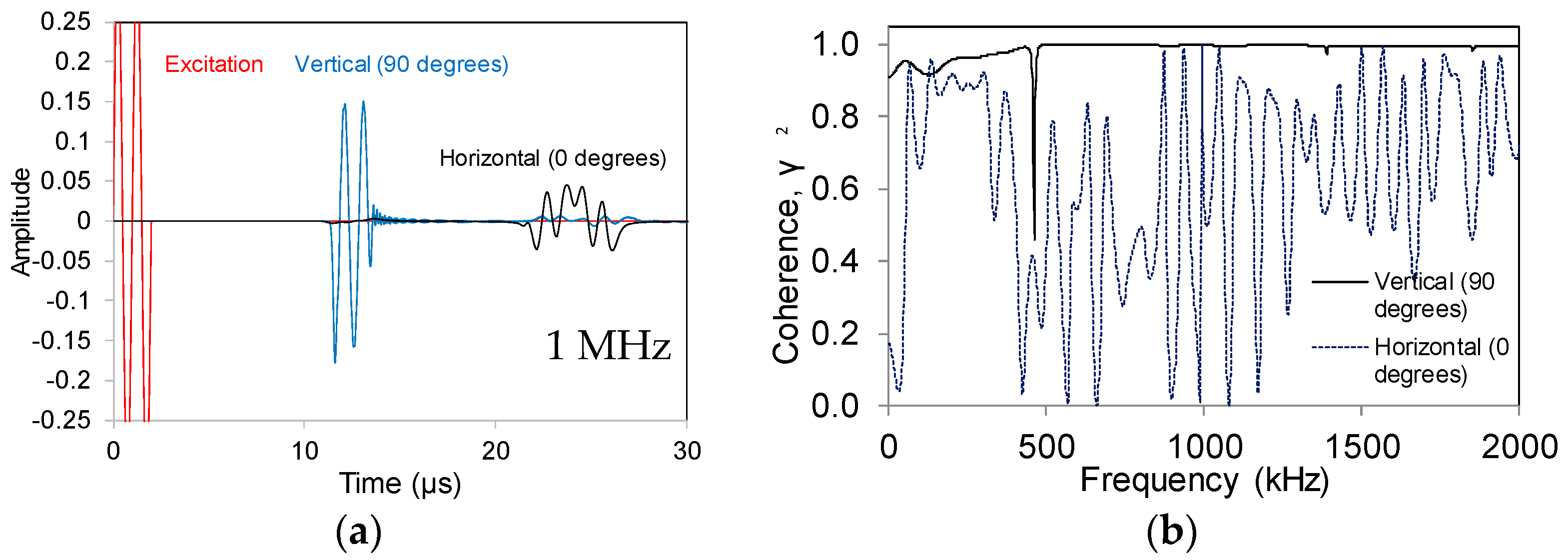
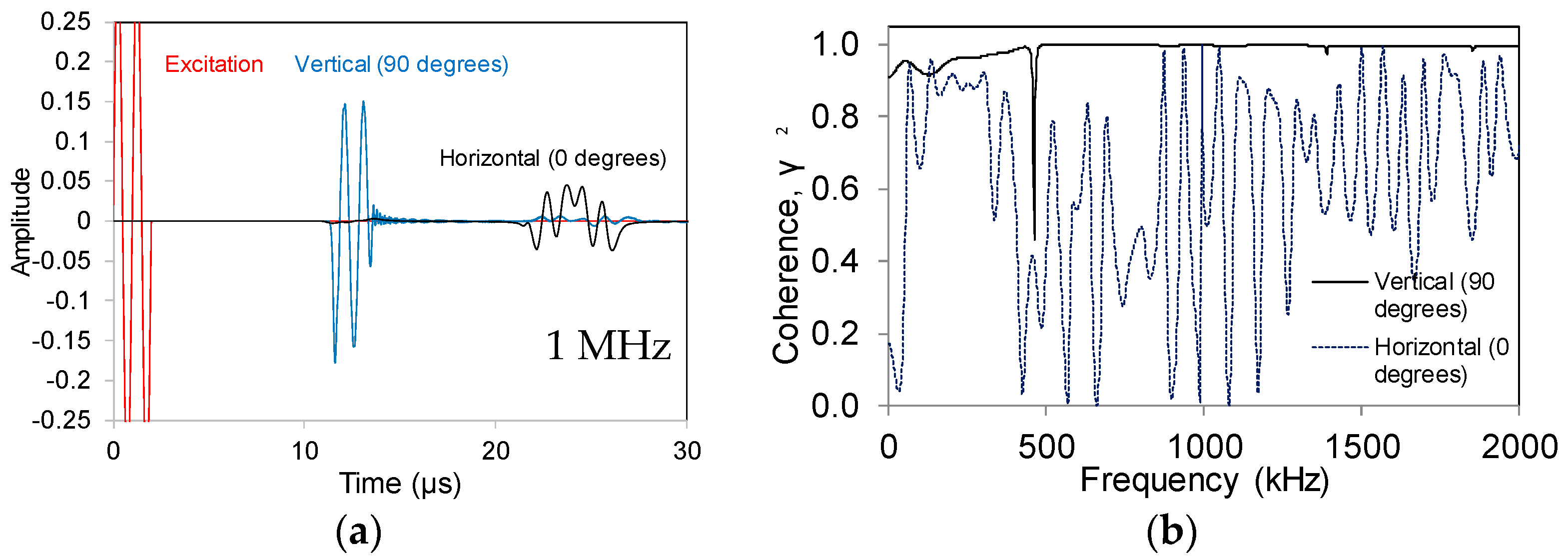
4.3. Impact of Sensors Size Effect on Frequency Content
4.4. Experimental Evidence
5. Secondary Effects
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Prosser, W.H. Acoustic Emission. In Nondestructive Evaluation, Theory, Techniques and Applications; CRC Press: New York, NY, USA, 2002; pp. 369–446. ISBN 9780824788728. [Google Scholar]
- Ishibashi, A.; Matsuyama, K.; Alver, N.; Suzuki, T.; Ohtsu, M. Round-robin tests on damage evaluation of concrete based on the concept of acoustic emission rates. Mater. Struct. 2016, 49, 2627–2635. [Google Scholar] [CrossRef]
- Sagasta, F.; Benavent-Climent, A.; Roldán, A.; Gallego, A. Correlation of Plastic Strain Energy and Acoustic Emission Energy in Reinforced Concrete Structures. Appl. Sci. 2016, 6, 84. [Google Scholar] [CrossRef]
- Shiotani, T.; Oshima, Y.; Goto, M.; Momoki, S. Temporal and spatial evaluation of grout failure process with PC cable breakage by means of acoustic emission. Constr. Build. Mater. 2013, 48, 1286–1292. [Google Scholar] [CrossRef]
- Carpinteri, A.; Xu, J.; Lacidogna, G.; Manuello, A. Reliable onset time determination and source location of acoustic emissions in concrete structures. Cem. Concr. Compos. 2012, 34, 529–537. [Google Scholar] [CrossRef]
- Tsangouri, E.; Karaiskos, G.; Deraemaeker, A.; Van Hemelrijck, D.; Aggelis, D.G. Assessment of acoustic emission localization accuracy on damaged and healed concrete. Constr. Build. Mater. 2016, 129, 163–171. [Google Scholar] [CrossRef]
- Shahidan, S.; Pullin, R.; Bunnori, N.M.; Holford, K.M. Damage classification in reinforced concrete beam by acoustic emission signal analysis. Constr. Build. Mater. 2013, 45, 78–86. [Google Scholar] [CrossRef]
- Farhidzadeh, A.; Salamone, S.; Singla, P. A probabilistic approach for damage identification and crack mode classification in reinforced concrete structures. J. Intell. Mater. Syst. Struct. 2013, 24, 1722–1735. [Google Scholar] [CrossRef]
- Blom, J.; El Kadi, M.; Wastiels, J.; Aggelis, D.G. Bending fracture of textile reinforced cement laminates monitored by acoustic emission: Influence of aspect ratio. Constr. Build. Mater. 2014, 70, 370–378. [Google Scholar] [CrossRef]
- McLaskey, G.C.; Glaser, S.D. Acoustic Emission Sensor Calibration for Absolute Source Measurements. J. Nondestruct. Eval. 2012, 31, 157–168. [Google Scholar] [CrossRef]
- Ono, K. Acoustic Emission in Materials Research—A Review. J. Acoust. Emiss. 2011, 29, 284–308. [Google Scholar]
- Zelenyak, M.; Hamstad, M.A.; Sause, M.G. Modeling of acoustic emission signal propagation in waveguides. Sensors 2015, 15, 11805–11822. [Google Scholar] [CrossRef] [PubMed]
- To, A.C.; Glaser, S.D. Full waveform inversion of a 3-D source inside an artificial rock. J. Sound Vib. 2005, 285, 835–857. [Google Scholar] [CrossRef]
- Ono, K. Calibration Methods of Acoustic Emission Sensors. Materials 2016, 9, 508. [Google Scholar] [CrossRef] [PubMed]
- Ono, K. On the Piezoelectric Detection of Guided Ultrasonic Waves. Materials 2017, 10, 1325. [Google Scholar] [CrossRef] [PubMed]
- Ono, K.; Hayashi, T.; Cho, H. Bar-Wave Calibration of Acoustic Emission Sensors. Appl. Sci. 2017, 7, 964. [Google Scholar] [CrossRef]
- Sause, M.G.R.; Hamstad, M.A.; Horn, S. Finite element modeling of conical acoustic emission sensors and corresponding experiments. Sens. Actuators A Phys. 2012, 184, 64–71. [Google Scholar] [CrossRef]
- Sause, M.G.R.; Hamstad, M.A. Numerical modeling of existing acoustic emission sensor absolute calibration approaches. Sens. Actuators A Phys. 2018, 269, 294–307. [Google Scholar] [CrossRef]
- Wave2000®/Wave2000® Plus-Software for Computational Ultrasonics. Available online: http://www.cyberlogic.org/wave2000.html (accessed on 15 October 2017).
- Pollock, A.A. Acoustic emission-2: Acoustic emission amplitudes. Non-Destr. Test. 1973, 6, 264–269. [Google Scholar] [CrossRef]
- Graff, K.F. Wave Motion in Elastic Solids; Dover Publications: New York, NY, USA, 1975; p. 688. ISBN 978-04-8-666745-4. [Google Scholar]
- Zhang, L.; Yalcinkaya, H.; Ozevin, D. Numerical approach to absolute calibration of piezoelectric acoustic emission sensors using multiphysics simulations. Sens. Actuators A Phys. 2017, 256, 12–23. [Google Scholar] [CrossRef]
- Bendat, J.S.; Piersol, A.G. Engineering Applications of Correlation and Spectral Analysis; Wiley: New York, NY, USA, 1993; p. 472. ISBN 978-0-471-57055-4. [Google Scholar]
- Grosse, C.U.; Reinhardt, H.; Dahm, T. Localization and classification of fracture types in concrete with quantitative acoustic emission measurement techniques. NDT E Int. J. 1997, 30, 223–230. [Google Scholar] [CrossRef]
- Philippidis, T.; Aggelis, D.G. An acousto-ultrasonic approach for the determination of water-to-cement ratio in concrete. Cem. Concr. Res. 2003, 33, 525–538. [Google Scholar] [CrossRef]
- Cowan, M.L.; Beaty, K.; Page, J.H.; Liu, Z.; Sheng, P. Group velocity of acoustic waves in strongly scattering media: Dependence on the volume fraction of scatterers. Phys. Rev. E 1998, 58, 6626–6636. [Google Scholar] [CrossRef]
- Lee, Y.-C.; Kuo, S.H. A new point-source/point-receiver acoustic transducer for surface wave measurement. Sens. Actuators A Phys. 2001, 94, 129–135. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsangouri, E.; Aggelis, D.G. The Influence of Sensor Size on Acoustic Emission Waveforms—A Numerical Study. Appl. Sci. 2018, 8, 168. https://doi.org/10.3390/app8020168
Tsangouri E, Aggelis DG. The Influence of Sensor Size on Acoustic Emission Waveforms—A Numerical Study. Applied Sciences. 2018; 8(2):168. https://doi.org/10.3390/app8020168
Chicago/Turabian StyleTsangouri, Eleni, and Dimitrios G. Aggelis. 2018. "The Influence of Sensor Size on Acoustic Emission Waveforms—A Numerical Study" Applied Sciences 8, no. 2: 168. https://doi.org/10.3390/app8020168
APA StyleTsangouri, E., & Aggelis, D. G. (2018). The Influence of Sensor Size on Acoustic Emission Waveforms—A Numerical Study. Applied Sciences, 8(2), 168. https://doi.org/10.3390/app8020168