Alpine Skiing Robot Using a Passive Turn with Variable Mechanism


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Alpine Ski Turning
3. Passive Turn Type of Ski Robot
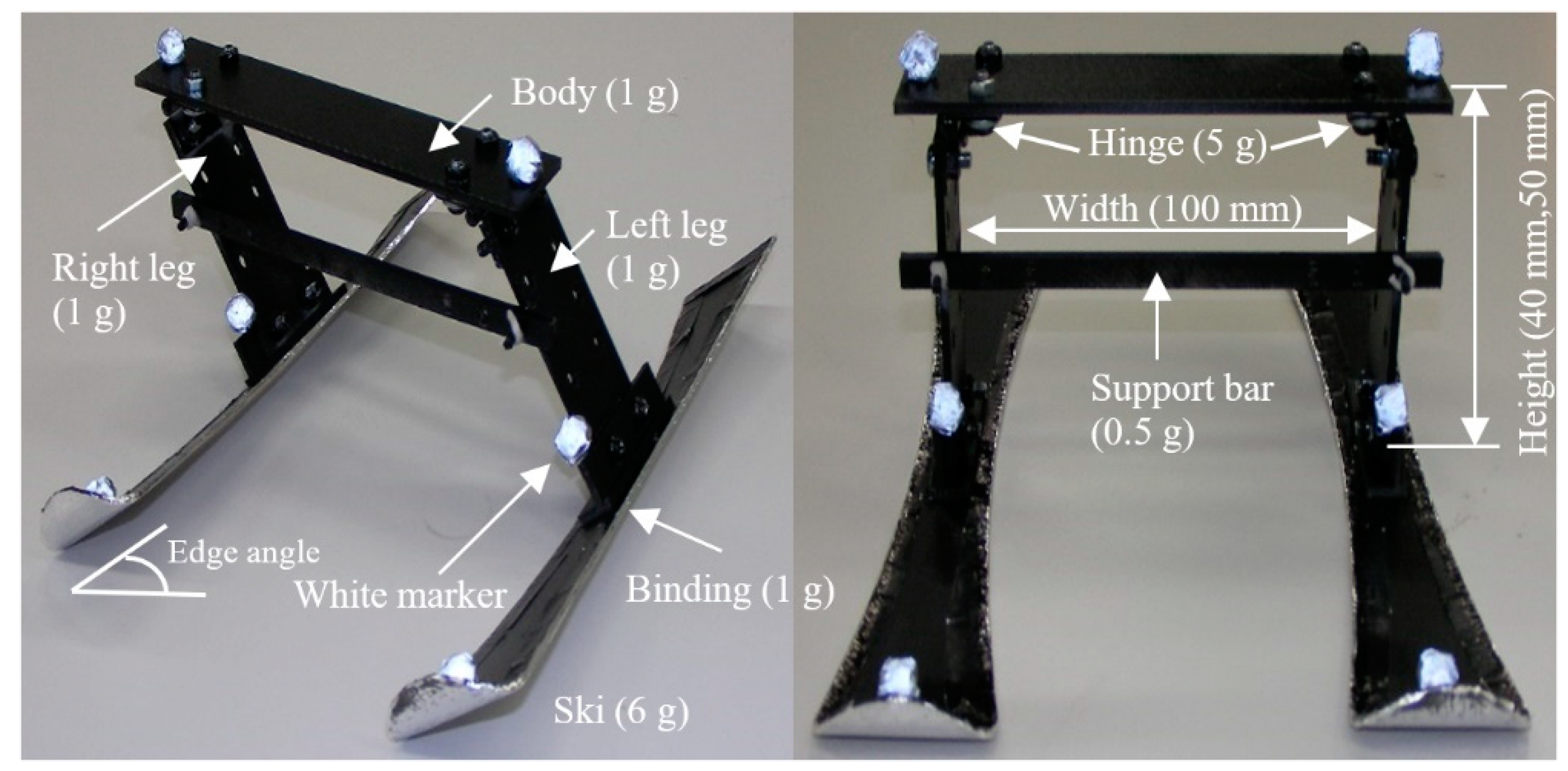
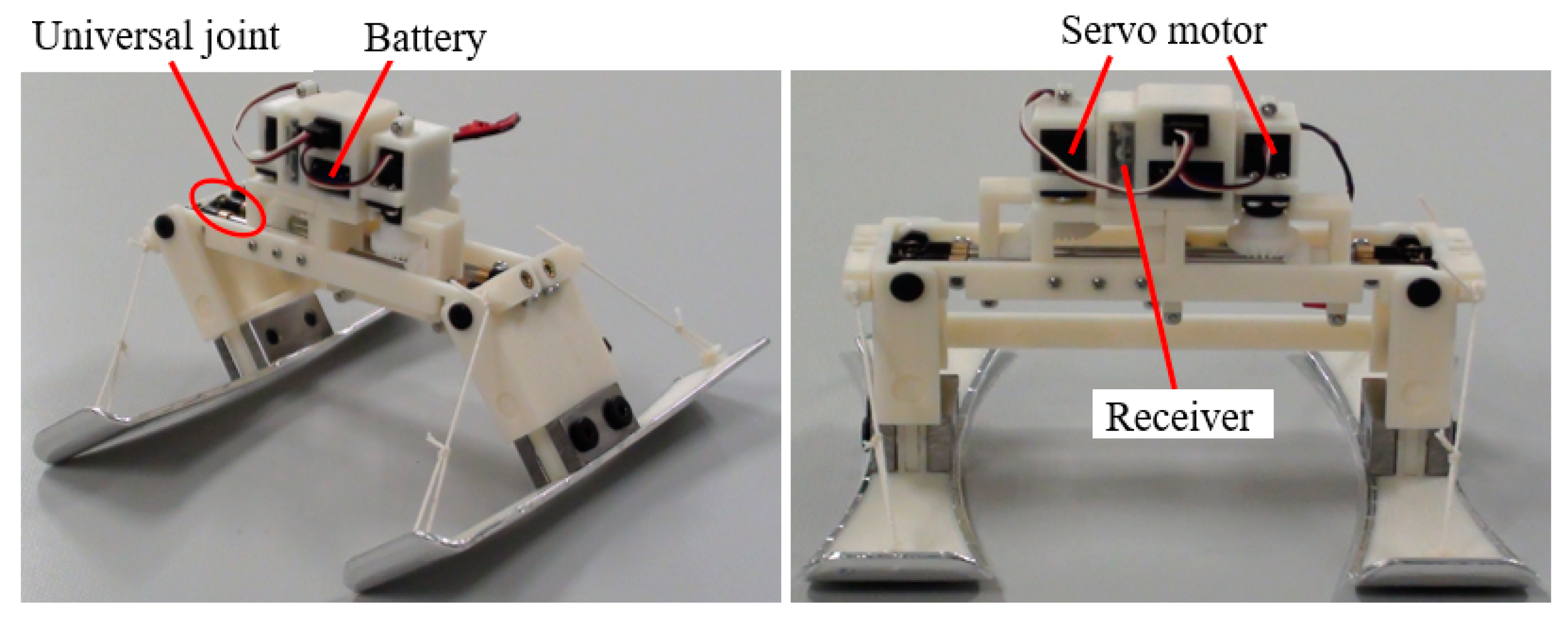
3.1. Composition of Ski Robot
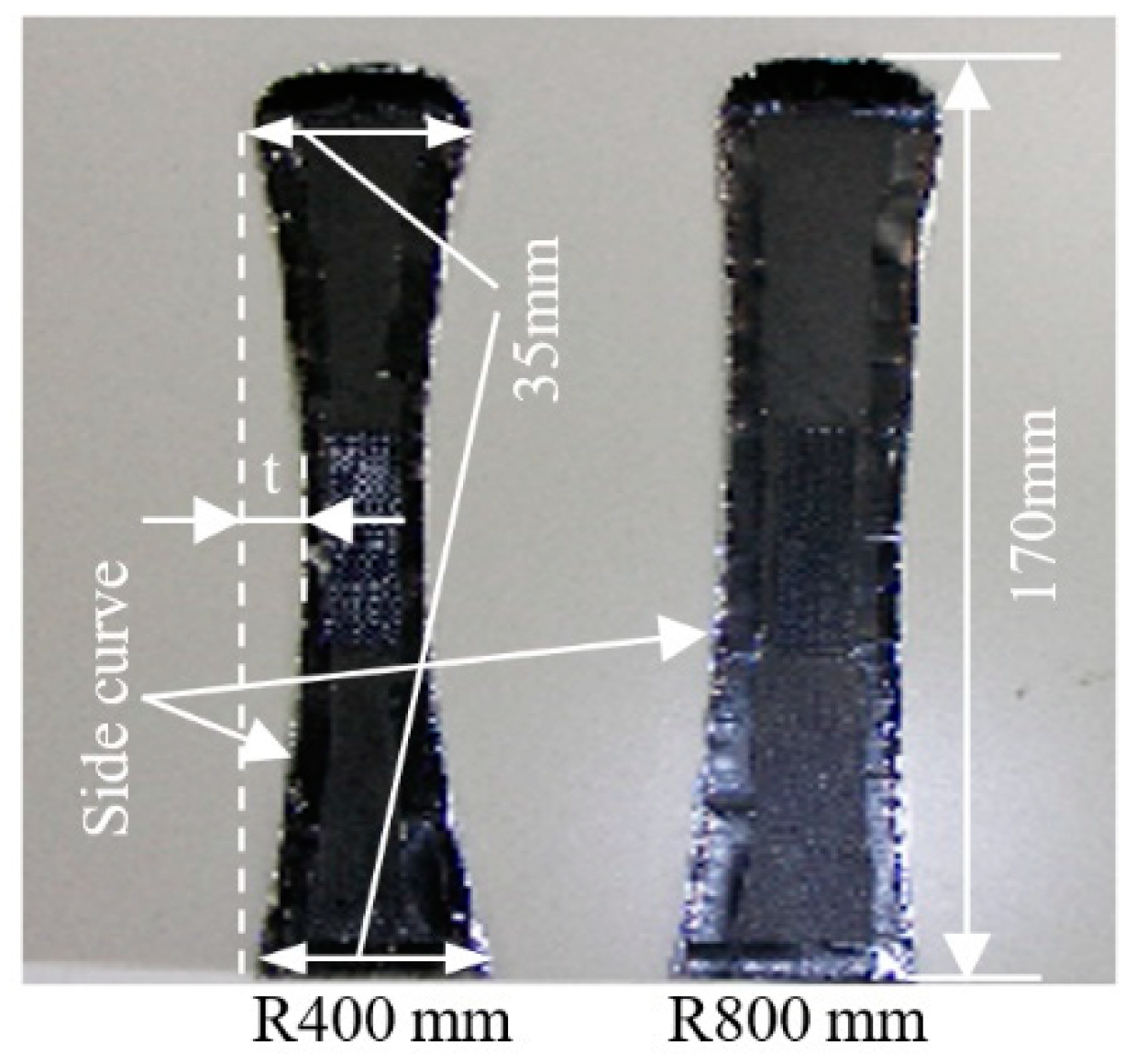
3.2. Profiles of Skis
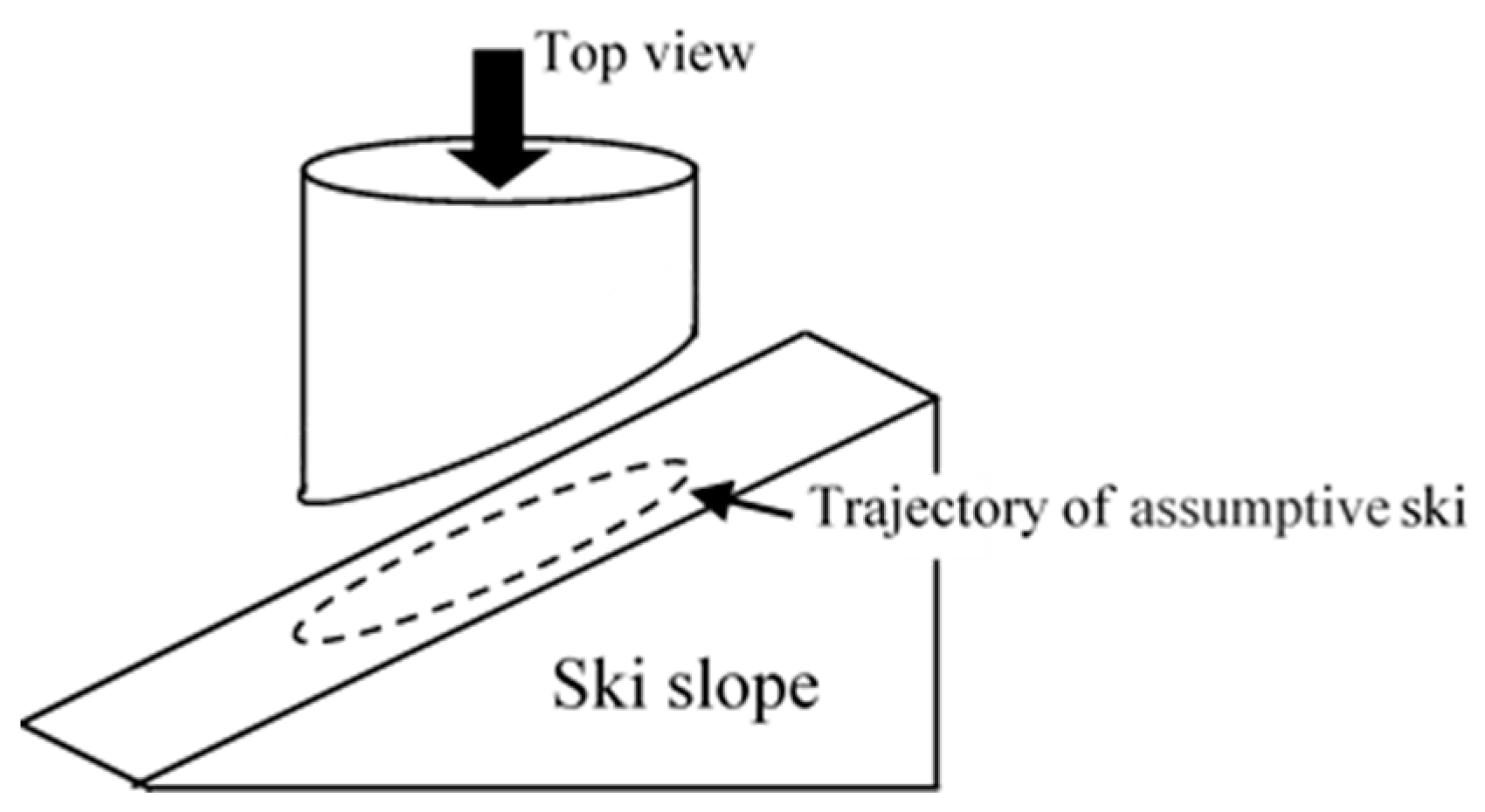
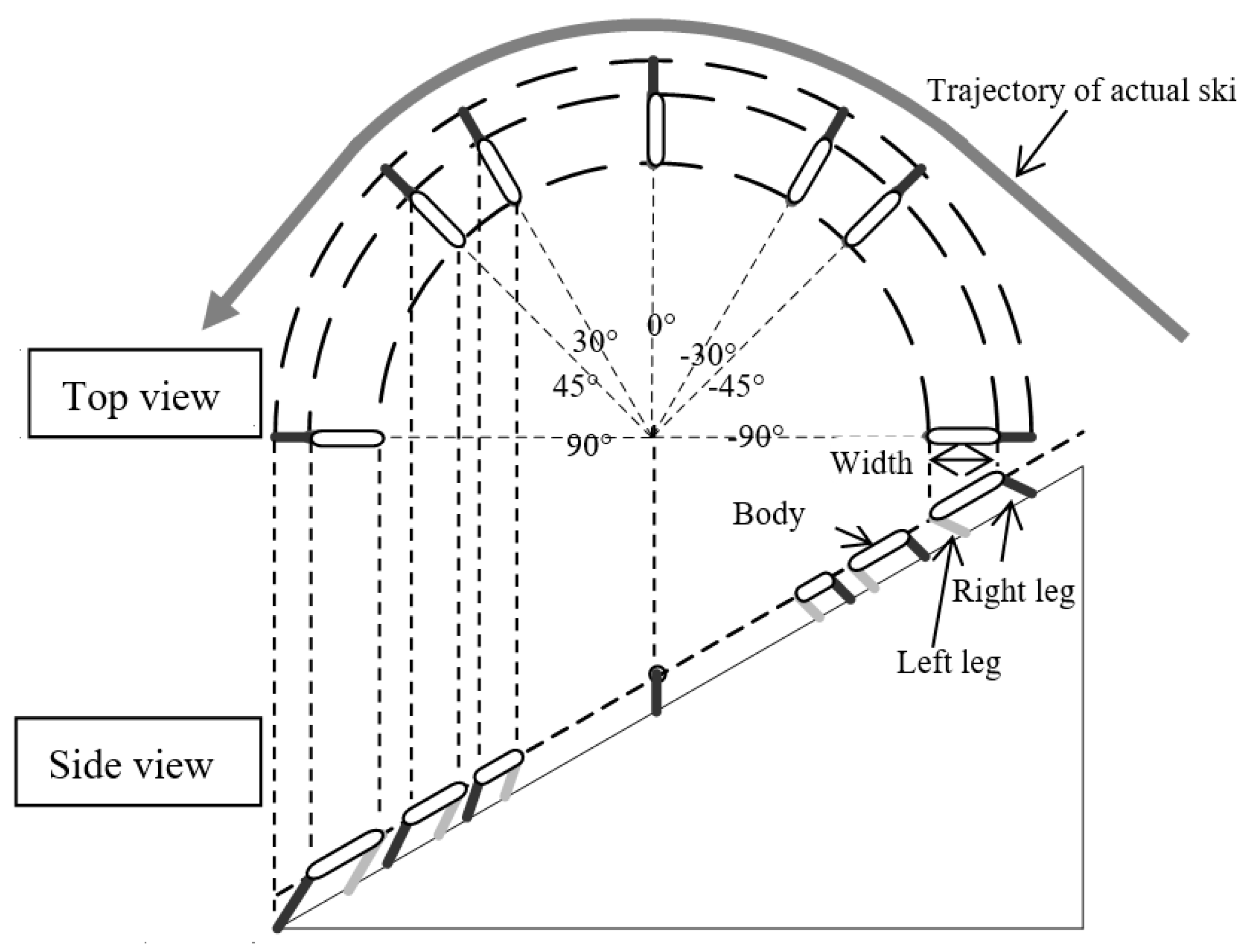
3.3. Passive-Turn Mechanism
- A 35 deg edge angle was used with a 25 deg ski slope.
- Side curve radii R of the skis are 400 mm.
- Speed at the turn is constant.
- Leg width is 80 mm.
- Body height is 40 mm.
- The COG is the body center.
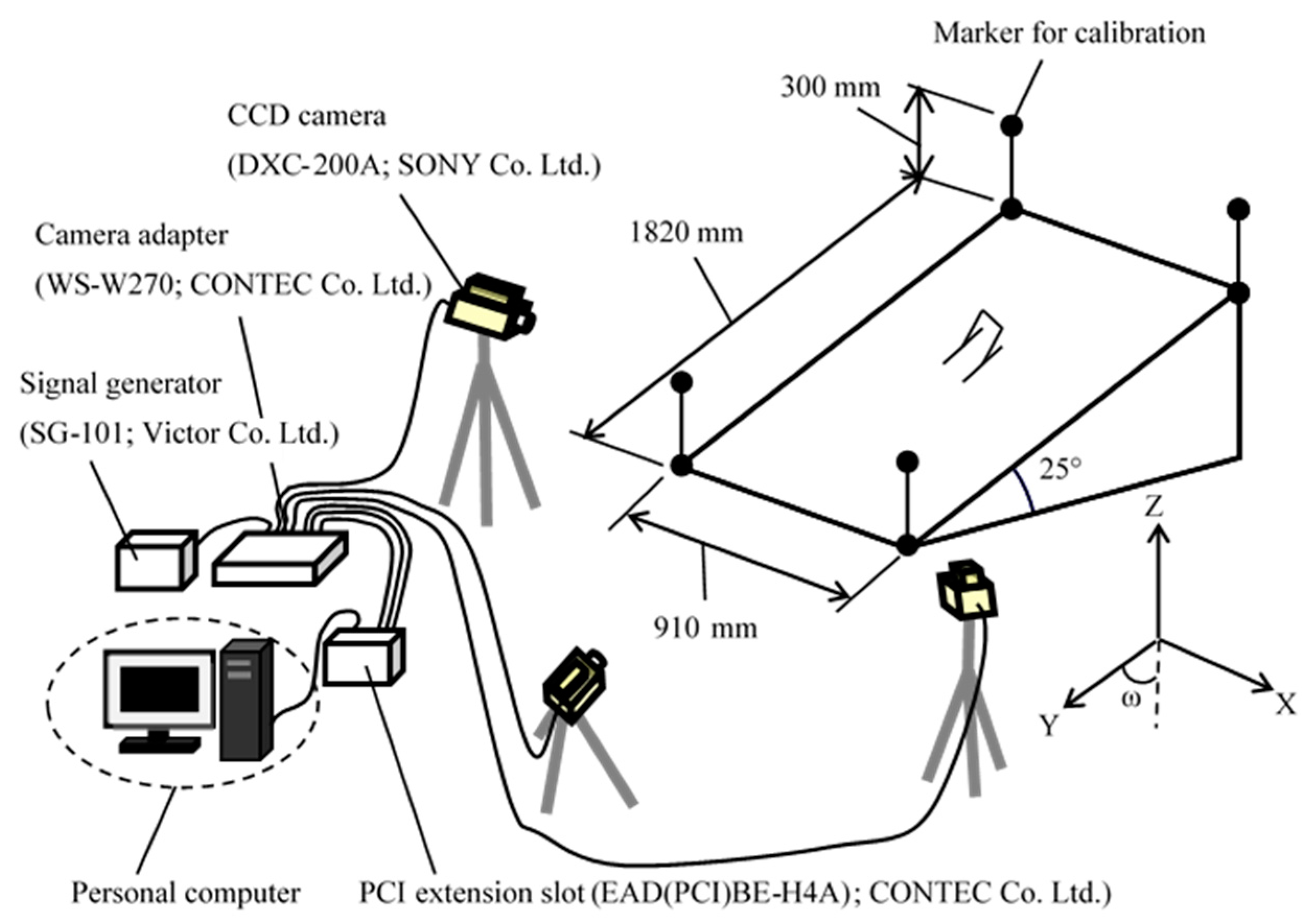
3.4. Experimental Method
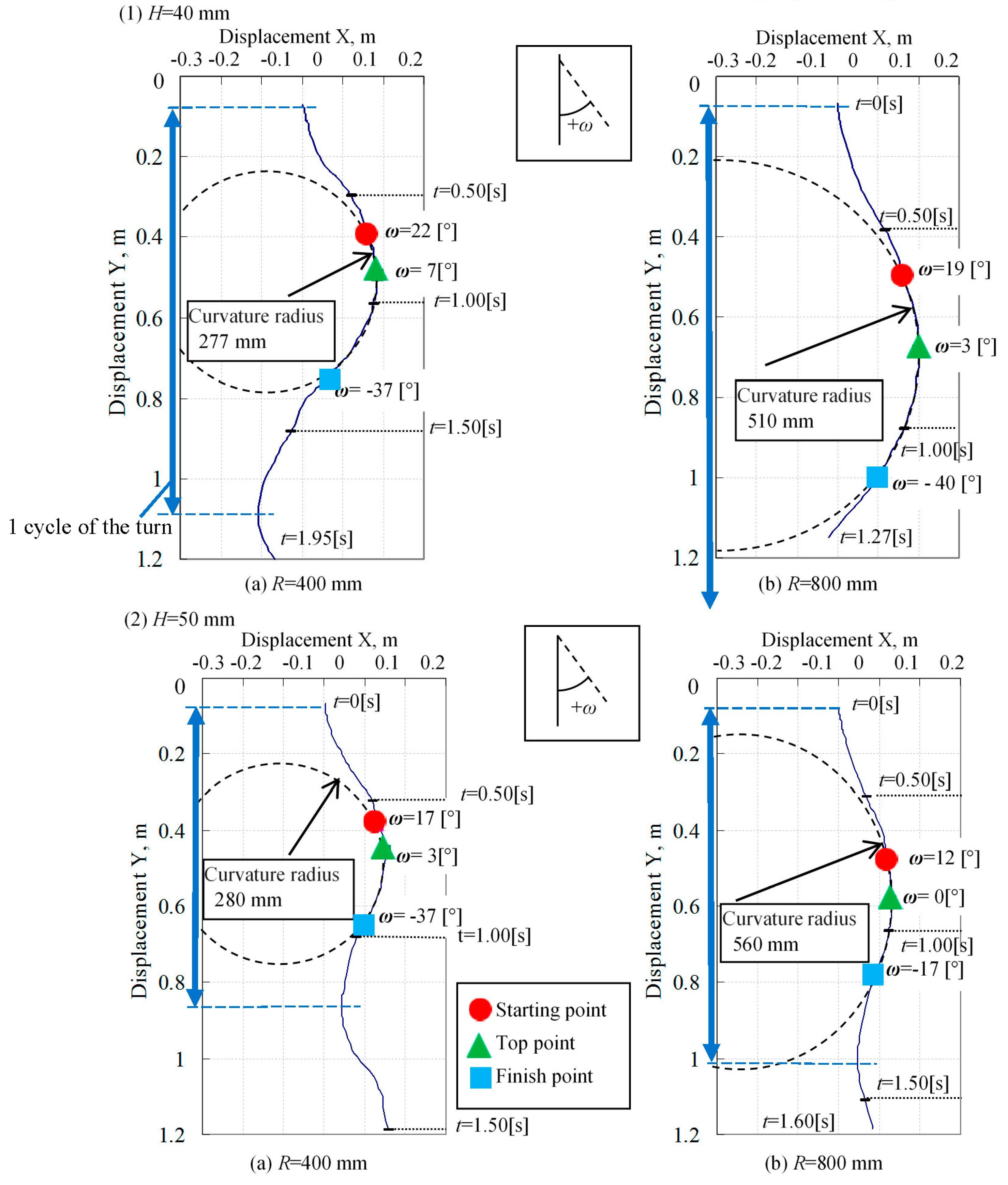
3.5. Body Height Difference Effects on Turning
4. Ski Robot Using Variable Height Mechanism of COG
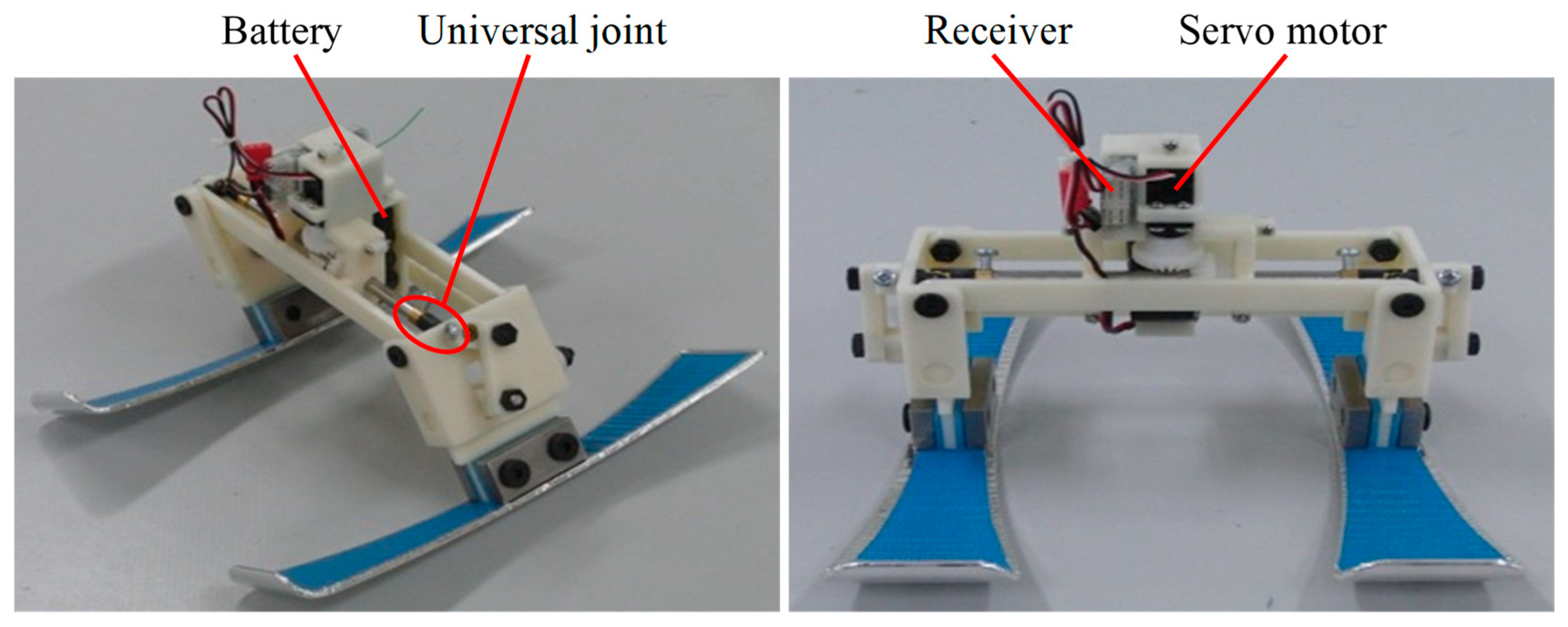
4.1. Composition of Ski Robot Incorporating a Variable Height Mechanism
4.2. Servomotor Response Characteristics
4.3. Switching Time in the COG Height
4.4. Experimental Method
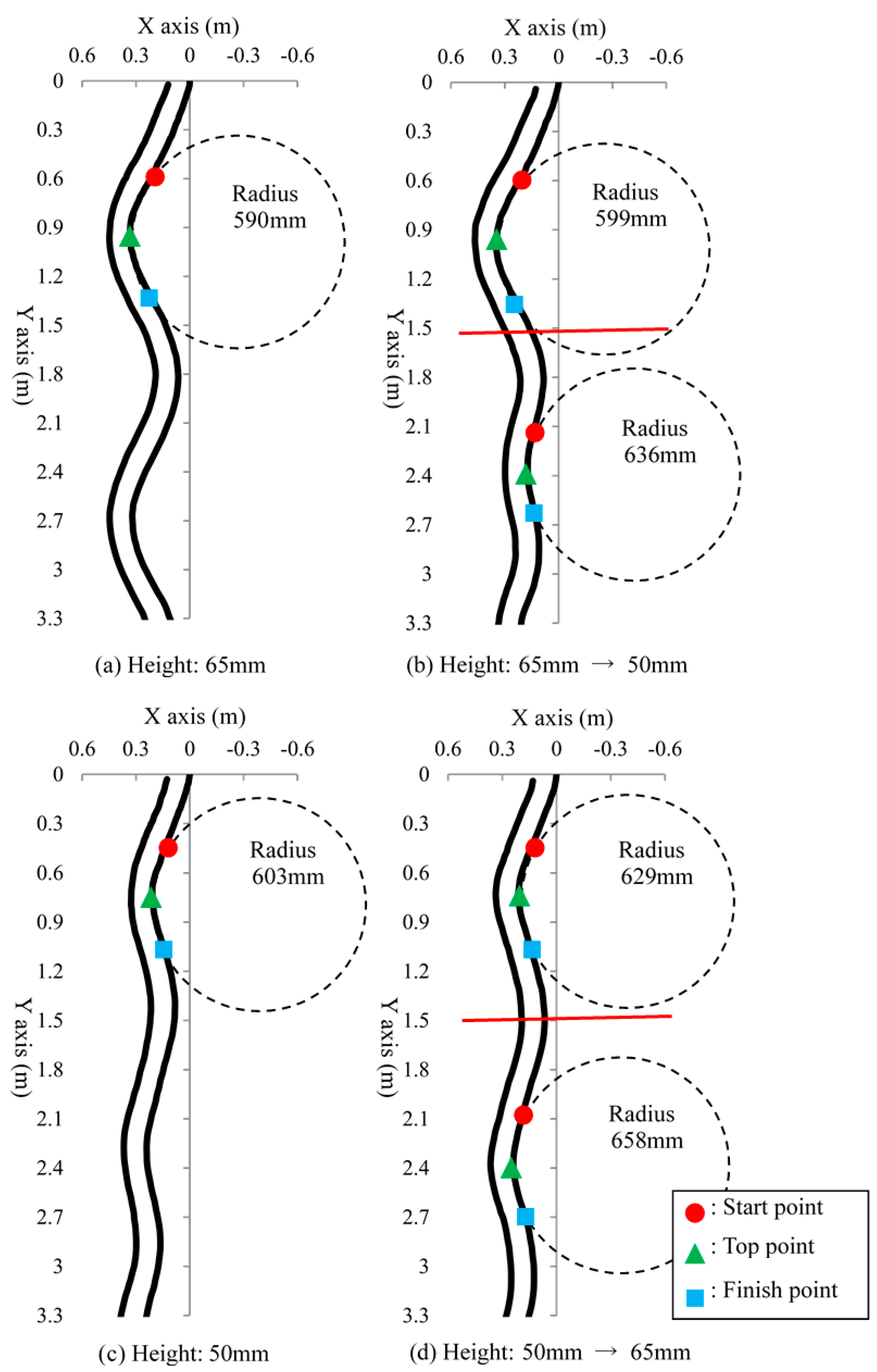
4.5. Experimental Results
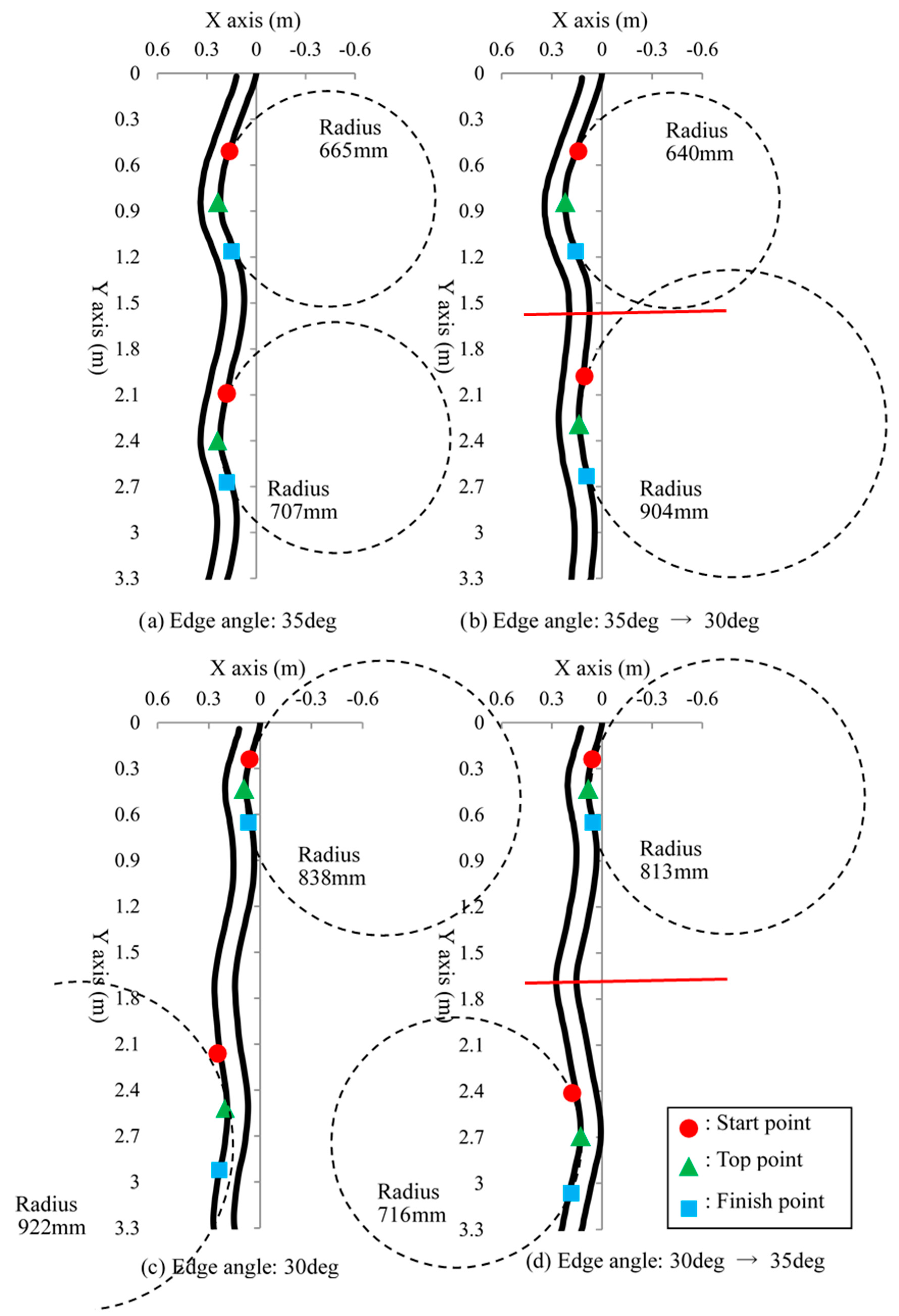
5. Ski Robot Using Variable Edge Angle Mechanism
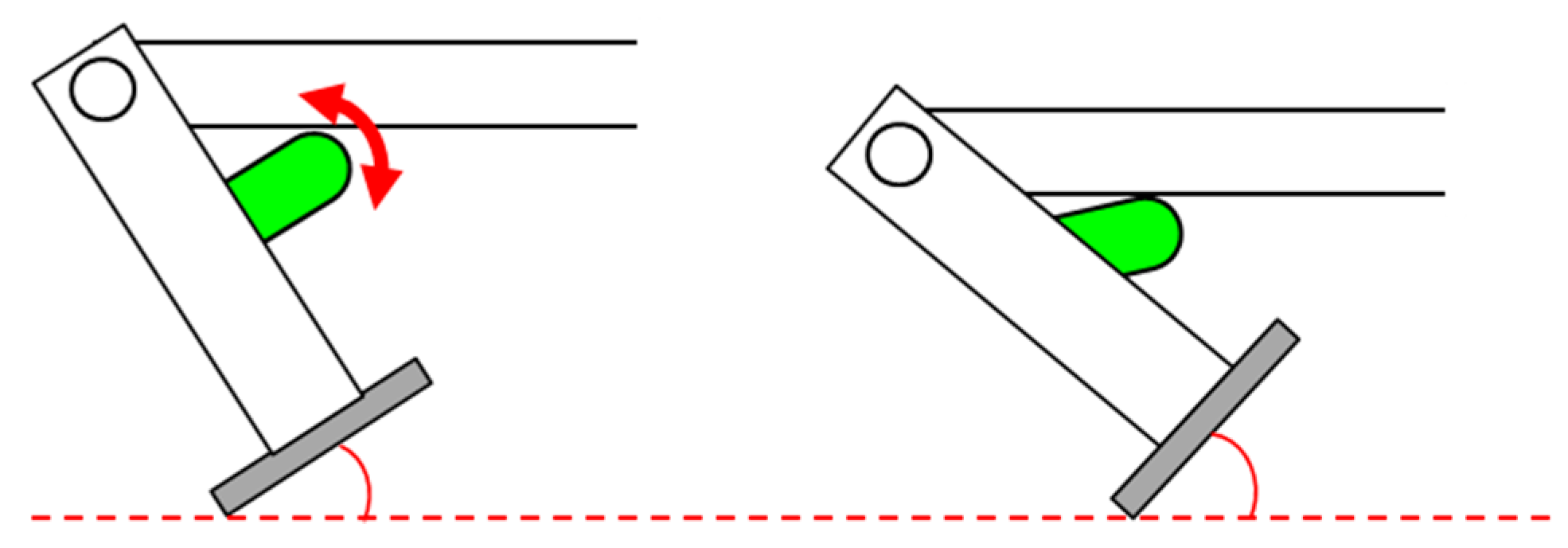
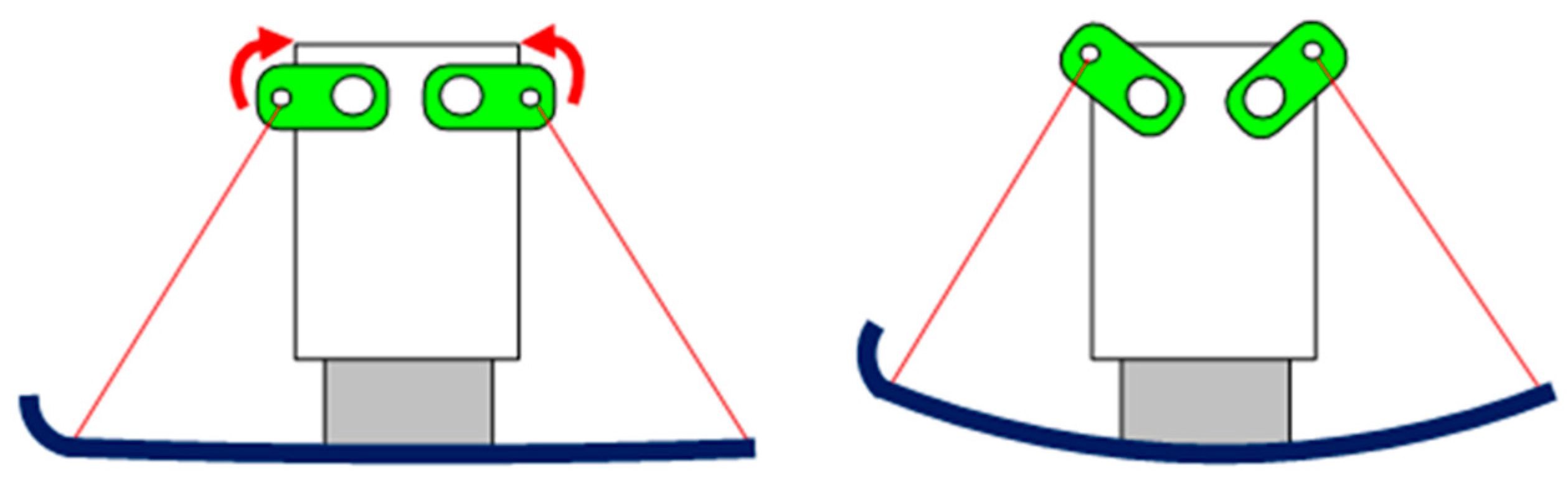
5.1. Composition of Ski Robot Using Variable Edge Angle Mechanism
5.2. Switching Time in the Edge Angle
5.3. Experimental Method
5.4. Experimental Results
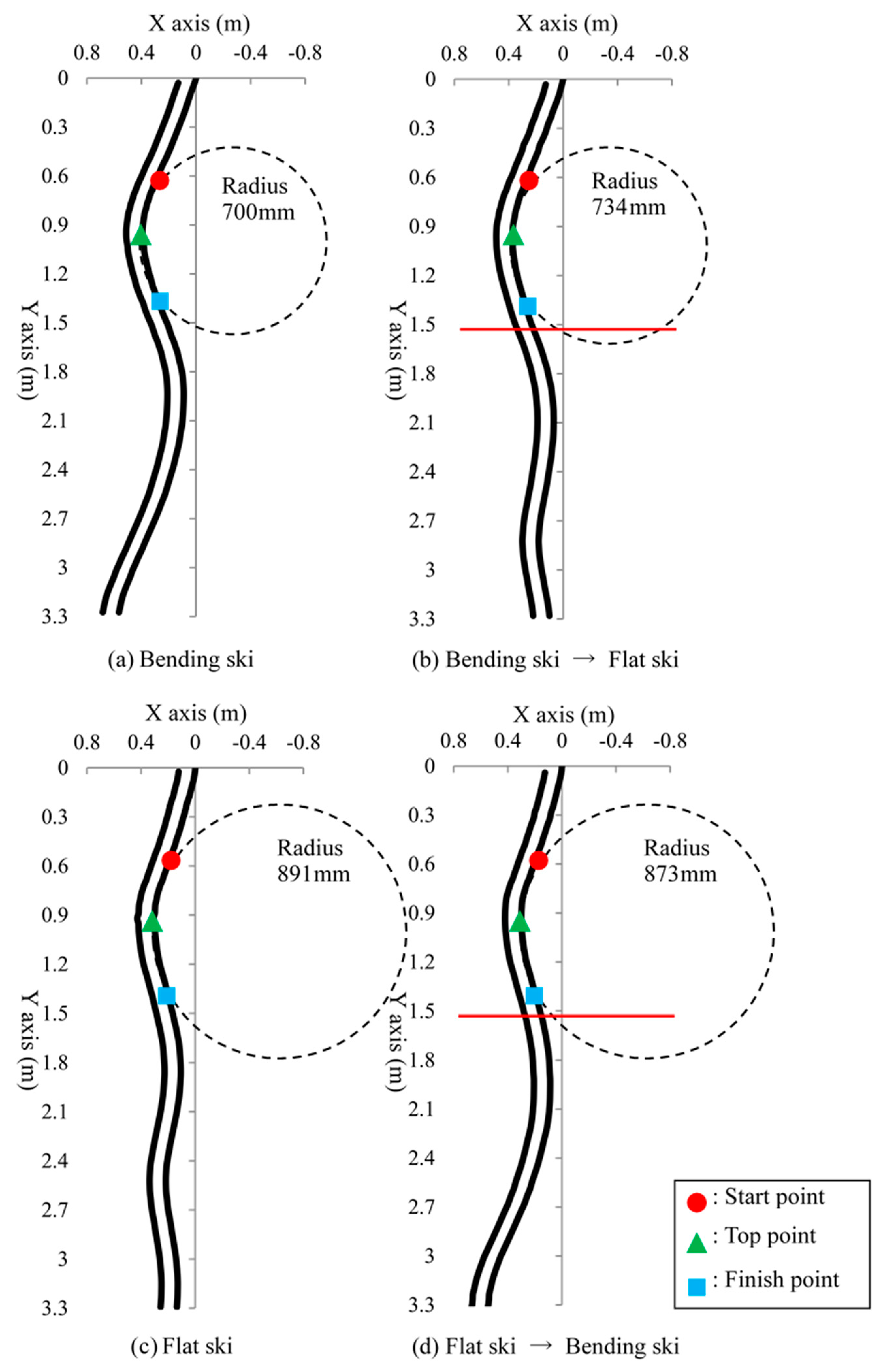
6. Ski Robot Using Variable Mechanism of Ski Flexure
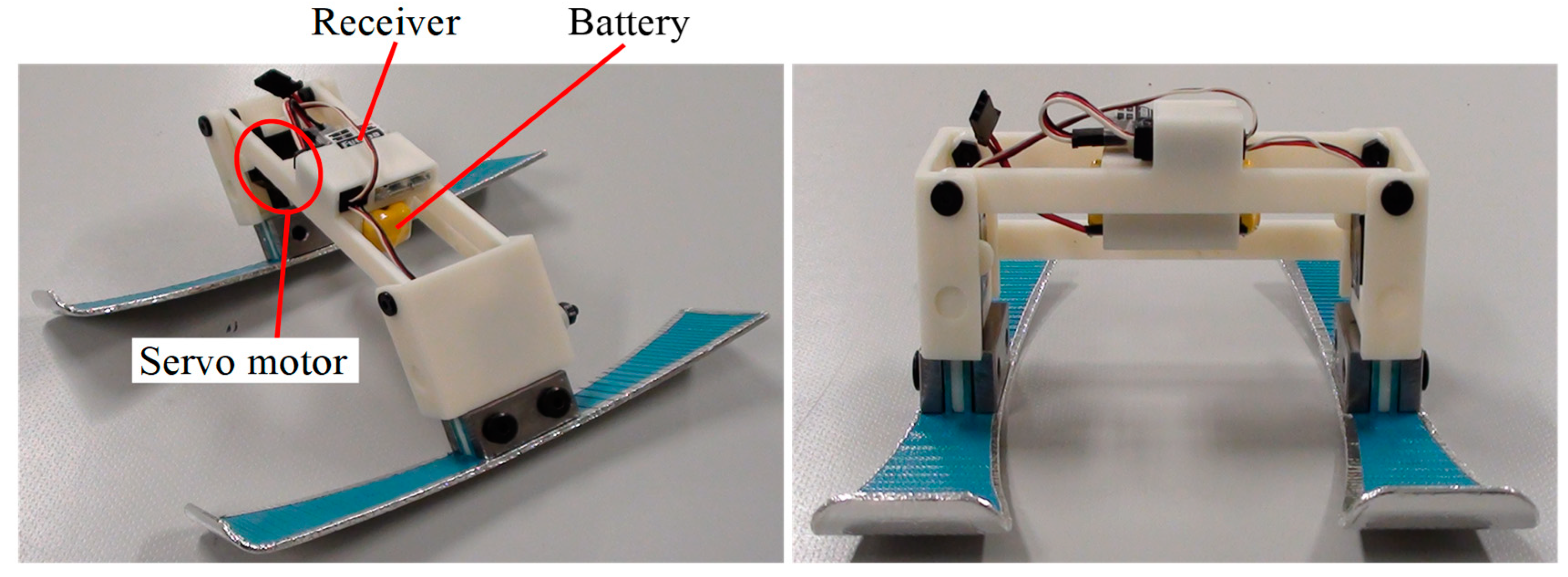
6.1. Ski Robot Incorporating a Mechanism of Variable Ski Flexure
6.2. Switching Time in the Ski Flexure
6.3. Experimental Method
6.4. Experimental Results
7. Conclusions
- A simple passive-turn type ski robot was fabricated to assess effects of differences of the robot construction and COG height on turning. The use of a hinge to connect the lumbar and leg allows the robot to repeat adduction and abductor movements of the hip joint using gravity exerted during sliding and to turning the hip joints continuously. In addition, when comparing the sliding trajectories of robots having different COG heights, the higher the COG is, the later the timing of switching to the opposite side turn becomes. For that reason, the cycle of the turn becomes larger.
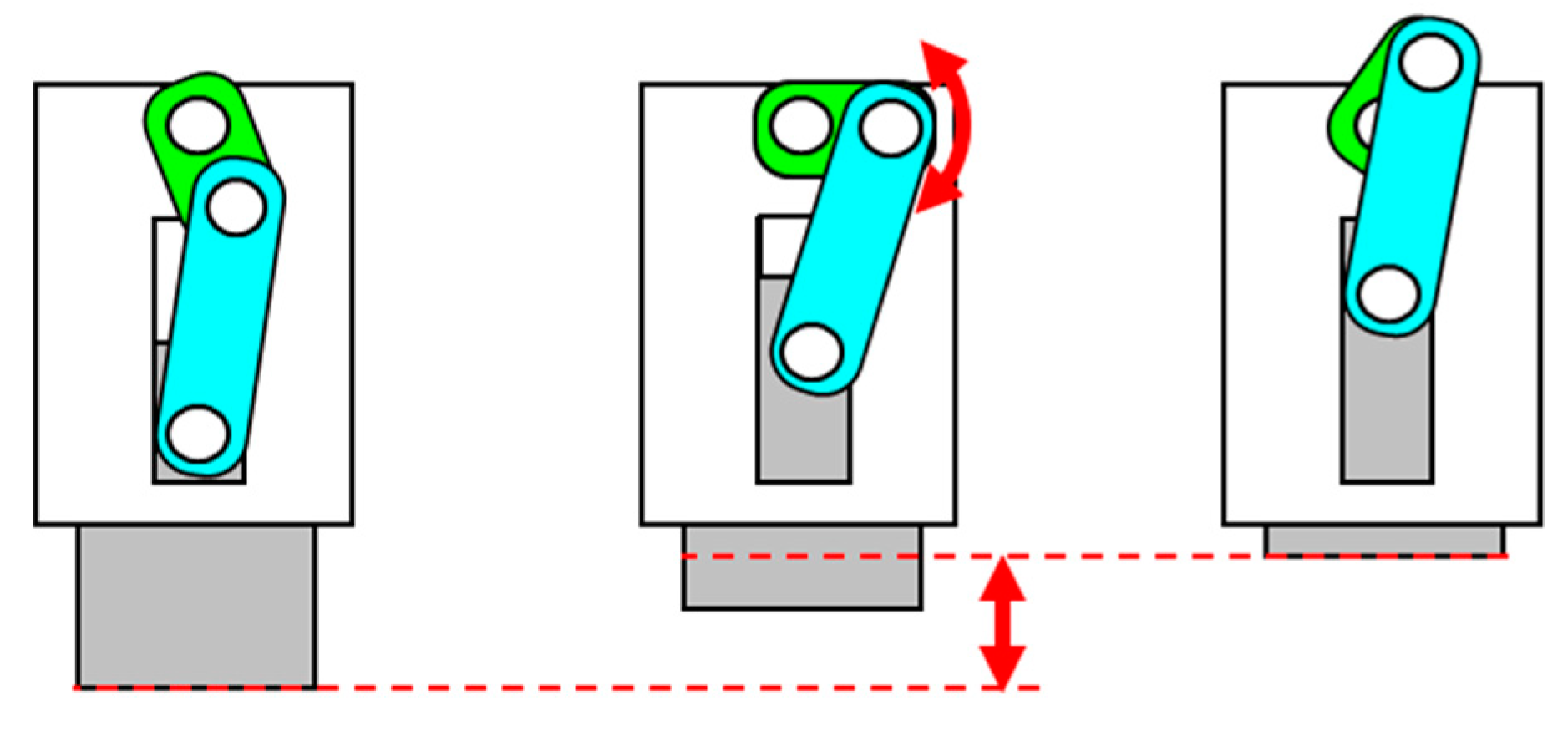
- To clarify the importance of the timing of changing the COG height in the turn by noting the influence on the turn caused by the COG height difference, a mechanism for varying the COG height was added to the passive turn ski robot. For turns in which the COG height was manipulated during running, the radius of curvature was almost identical. Only the cycle of the turn changed. Results show that the timing of raising and lowering the COG height changed the switching point of the turn, which is the movement of the COG in the left and right directions.
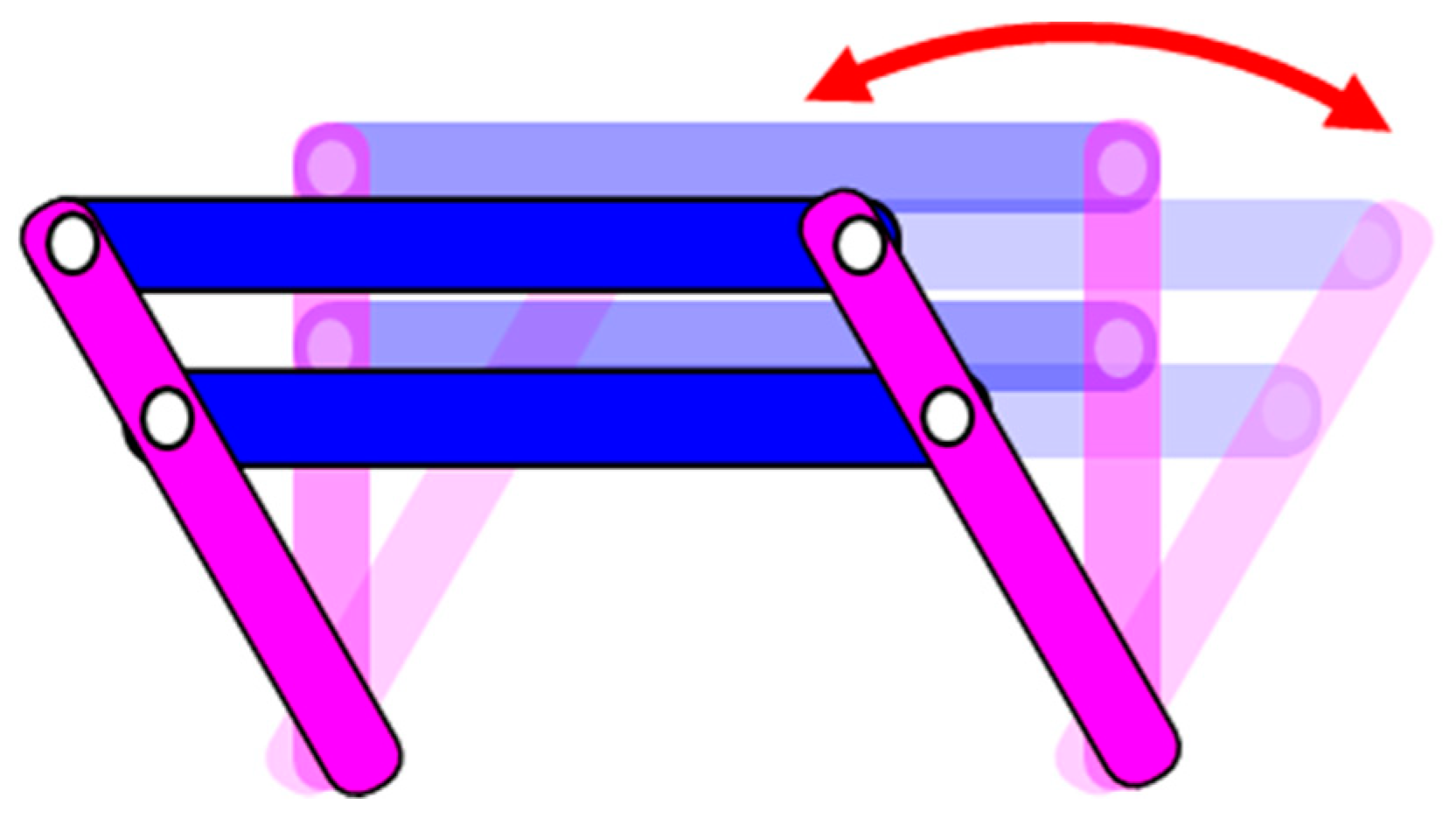
- To clarify the importance of the edge angle in the turn by noting the influence on the turn by the difference in the edge angle, which is one factor affecting the turn, a mechanism for varying the edge angle was added to the passive turn type ski robot. Results show that the radius of curvature of the turn was changed during turning in which the edge angle was manipulated during sliding. Moreover, the depth of the arc of the turn was altered by the timing of the edge angle increase or decrease.
- A mechanism for varying the ski deflection was added to the passive turn ski robot to clarify the importance of the ski deflection during turning by elucidating the influence on turning of the ski deflection the skier exerts during turning. Results demonstrated that the turn can be performed with a small curvature by deflecting the ski and show that the turn trajectory was altered by the plate deflection during sliding.
- No consideration of friction exists in this study. Therefore, we would like to defer to future work our planned comparison of the running experiment results and a theoretical model incorporating the contact area of the snow in an alpine ski model.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hosokawa, K.; Kawai, S.; Sakata, T. Improvement of damping property of skis. Sports Eng. 2002, 5, 107–112. [Google Scholar] [CrossRef]
- Khmelev, V.N.; Levin, S.V.; Tsyganok, S.N.; Shalunov, A.V.; Chipurin, E.V. The New Technology of Sliding Ski Surface Covering. In Proceedings of the 6th Annual 2005 International Siberian Workshop and Tutorials on Electron Devices and Materials, Erlagol, Altai, Russian Federation, 1–5 July 2005; pp. 86–89. [Google Scholar]
- Shimizu, S.; Hasegawa, K.; Nagasawa, T. Alpine skiing robot. Adv. Robot. 1992, 6, 375–376. [Google Scholar] [CrossRef]
- Kawai, S.; Otani, H.; Sakata, T. Coupled Motion of Ski and Elastic Foundation Under Ski Control. JSME Int. J. Ser. C 2003, 46, 614–621. [Google Scholar] [CrossRef]
- Sakata, T.; Tsukiyama, M. Effects of Position of Shoe Center on Ski Turn. JSME Int. J. Ser. C 1999, 42, 922–929. [Google Scholar] [CrossRef]
- Tada, N.; Hirano, Y. In Search of the Mechanics of a Turning Alpine Ski Using Snow Cutting Force Measurements. Sports Eng. 2002, 5, 15–22. [Google Scholar] [CrossRef]
- Sahashi, T.; Ichino, S. Coefficient of Kinetic Friction of Snow Skis during Turning Descents. Jpn. J. Appl. Phys. 1998, 37, 720–727. [Google Scholar] [CrossRef]
- Morawski, J.M. Control System Approach to a Ski-turn Analysis. J. Biomech. 1973, 6, 267–279. [Google Scholar] [CrossRef]
- Sakata, T.; Ito, T. Simulation of Ski Turn. In Proceedings of the 2nd International Conference the Engineering of Sports, Sheffield, UK, 8 July 1998; pp. 361–368. [Google Scholar]
- Kagawa, H.; Yoneyama, T.; Okamoto, A.; Komatsu, H. Development of a Measuring System for Joint Angles of a Skier and Applied Forces during Skiing. JSME Int. J. Ser. C 1998, 41, 214–219. [Google Scholar] [CrossRef]
- Kawai, S.; Yamaguchi, K.; Sakata, T. Ski Control Model for Parallel Turn Using Multibody System. JSME Int. J. Ser. C 2004, 47, 1095–1100. [Google Scholar] [CrossRef]
- Hasegawa, K.; Shimizu, S. Dynamics of Repeated Parallel Turns of Snow Ski. J. Jpn. Soc. Sports Ind. 1995, 5, 9–18. (In Japanese) [Google Scholar] [CrossRef]
- Sahashi, T.; Ichino, S. Carving-turn and edging angle of skis. Sports Eng. 2001, 4, 135–145. [Google Scholar] [CrossRef]
- Nemec, B.; Lahajnar, L. Control and Navigation of the Skiing Robot. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2321–2326. [Google Scholar]
- Yoneyama, T.; Kagawa, H.; Unemoto, M.; Iizuka, T.; Scott, N.W. A ski robot system for qualitative modeling of the carved turn. Sports Eng. 2009, 11, 131–141. [Google Scholar] [CrossRef]
- Shimizu, S.; Doki, H.; Nojiri, N. Robot Models for Passive Dynamic Skiing—A Skidding-turn Model of Abduction and Adduction with Inner Rotation of the Hip Joints. J. Ski Sci. 2012, 9, 29–33. (In Japanese) [Google Scholar]
- Shimizu, S.; Doki, H.; Yamane, M.; Nojiri, N. Robot Models for Passive Dynamic Skiing—A Snowplow Model of Rotation Involving the Hip Joints around the Femur Axes. J. Ski Sci. 2013, 10, 13–18. (In Japanese) [Google Scholar]
- Shimizu, S.; Doki, H.; Yamane, M.; Sakatani, M.; Nojiri, N. Robot Models for Passive Dynamic Skiing—A Skidding-turn Model of Inward Lean with Inner Rotation of the Hip Joints. J. Ski Sci. 2014, 11, 13–18. (In Japanese) [Google Scholar]
- Kono, K.; Saga, N. Experimental Study on Alpine Skiing Turn Using Passive Skiing Robot. In Intelligent Robotics and Applications; Lecture Notes in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5928, pp. 1044–1050. [Google Scholar]
- Kono, K.; Saga, N. Development of a passive turn type skiing robot with variable height mechanism of gravitational center. J. Robot. Mechatron. 2012, 24, 372–378. [Google Scholar] [CrossRef]

















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saga, T.; Saga, N. Alpine Skiing Robot Using a Passive Turn with Variable Mechanism. Appl. Sci. 2018, 8, 2643. https://doi.org/10.3390/app8122643
Saga T, Saga N. Alpine Skiing Robot Using a Passive Turn with Variable Mechanism. Applied Sciences. 2018; 8(12):2643. https://doi.org/10.3390/app8122643
Chicago/Turabian StyleSaga, Takuma, and Norihiko Saga. 2018. "Alpine Skiing Robot Using a Passive Turn with Variable Mechanism" Applied Sciences 8, no. 12: 2643. https://doi.org/10.3390/app8122643
APA StyleSaga, T., & Saga, N. (2018). Alpine Skiing Robot Using a Passive Turn with Variable Mechanism. Applied Sciences, 8(12), 2643. https://doi.org/10.3390/app8122643