1. Introduction
Energy generation from offshore wind farms has been garnering the attention of researchers, owing to the abundance of resources and low environmental impact. Compared to offshore wind turbines in shallow water, floating offshore wind turbines (FOWTs) have more advantages [
1]; i.e., there are several deep-water sites suitable for installing turbines, wind is more abundant in offshore areas, and public concerns on the visual and environmental impacts are minimized with this technology. Some floating wind farms have been established; for instance, the first full-scale 2.3-MW FOWT was installed in Hywind near the coast of Norway, and last year, five 6-MW FOWTs were installed in the North Sea off the coast of Peterhead, Scotland.
However, it is difficult and expensive to operate a real-scale test model and accurately calculate critical loads because the complex multi-physical phenomena are not easy to simulate in reality. In addition, this technology is dependent on extreme weather situations (such as 25 m/s cut-out speeds). Thus, the use of computational methods, involving virtual full-scale modeling, may increase the development of the controllers’ reliability (such as structure and loads) of FOWTs, reduce the risks involved, and build confidence in the design stage. Among the codes used, one of the most famous ones is the Fatigue, Aerodynamics, Structures, and Turbulence code (FAST), which was developed by the National Renewable Engineering Lab (NREL) based on the blade element momentum (BEM) theory [
2]. However, the BEM theory is seldom applied in FOWT situations owing to its theoretical limitation. In contrast, the fluid structure interaction (FSI) simulations, as a modern computational analysis method, has proven to be an accurate and convincing method for considering aero-hydro-servo-elastic problems; however, complex fluid conditions and blade deformation presents significant computational challenges.
Further, correctly simulating the movement of floaters on free surfaces is also a major challenge; many researchers from different institutions have developed various codes and solvers to simulate the hydrodynamic performance of floaters. Nearly all solvers are based on the following theories: the potential-based panel approach and Morrison equation. The former cannot determine viscous flow details and is usually used together with the damping coefficient obtained from experimental test data. The FAST code HydroDyn module has applied this method. The Morison equation is a semi-empirical equation; this equation mainly describes the inline force in oscillatory flow conditions; this also has theoretical limitations and it cannot adequately describe the time-dependent force. Examples include the wave analysis MIT (WAMIT), TimeFloat, and CHARM3D. However, there are still some physical phenomena that cannot be fully described. Conversely, the unsteady computational fluid dynamics (CFD) approach can simulate with consideration of all physical effects, including flow viscosity, hydrostatic forces, wave diffraction, radiation, wave run-up, and slamming and provide reliable and accurate results regarding the platform movement.
Owing to the reasons mentioned above, the CFD method is widely considered an effective and reliable method to simulate the FOWT problem; to date, several CFD-related investigations have been performed. However, previous studies have used the following methods, ignoring some effects, leading to inaccurate results. First, to investigate the hydrodynamic load and motion response of a platform on an FOWT, some studies just simplified the problem into wind turbine aerodynamic loading or ignored the tower and rotor-nacelle-assembly. Second, some studies focused on aerodynamic loading but restricted the motion of the floating platforms to a prescribed position or did not allow the platform to move with 6 DOF.
Unai Fernandez-Gamiz et al. [
3] developed an improved BEM-based solver to verify the NREL 5-MW wind turbine and determined the bending moment and thrust force in the blade root; they also investigated rectangular sub-boundary layer vortex generators using the CFD method [
4], which showed the highest vortex generator suitable for separation control. Nematbakhsh et al. [
5] developed a CFD spar model and successfully captured strong nonlinear effects, which cannot be captured using the FAST code. Furthermore, their study also observed that when the wave amplitude was large, a discrepancy could exist between CFD and FAST. Vaal et al. [
6] used the BEM method to investigate the surge motion of FOWTs. This showed that the BEM method could only provide a reasonable solution under slow surge motion conditions; this is because, in this condition, the wake dynamics can be ignored. Zhao and Wan [
7] used a Naoe-FOAM-SJTU simulated OC4 platform to study the effects of the presence of wind turbines. They carried out platform pitch motions at high wind speeds and investigated the wind turbine effect on the floating platform. Tran et al. [
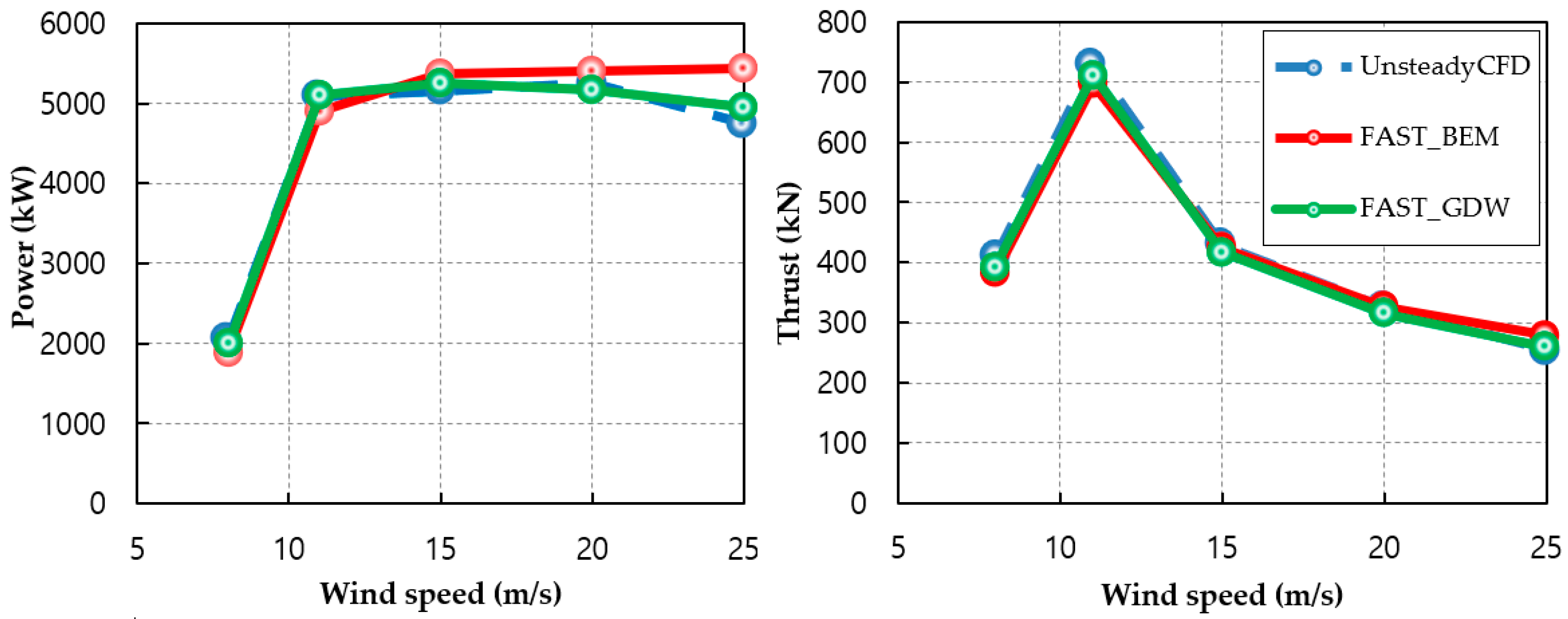
8] set the platform to execute a prescribed sinusoidal pitching motion and changed the motion amplitudes and frequencies, instead of modeling a floating platform with 6 DOF using the unsteady BEM theory, generalized dynamic wake (GDW), and CFD; large discrepancies were observed when the pitch amplitude increased to 4°. Tran et al. [
9] analyzed an FOWT system under a prescribed sinusoidal surge motion, and found that thrust and power varied significantly, which is related to the oscillation frequency; the surge motion amplitude also varied significantly. Liu et al. [
10] superimposed three DOF platform motions (surge, heave, and pitch) and concluded that the platform motion significantly impacted the thrust and torque of the wind turbine. Ren et al. [
11] used FLUENT analysis for a 5-MW tension-leg-platform-type turbine under coupled wave-wind conditions and validated the simulation results against experimental data. They only considered the surge motion and concluded that during the variation in the average/mean surge response of the system, aerodynamic forces played the main role. Quallen et al. [
12] performed a CFD simulation involving an OC3 spar-type FOWT model under wind–wave excitation conditions. The mean surge motion predicted using the CFD model was 25% less than that predicted using FAST. Tran and Kim [
13] modeled an OC4 semi-submersible FOWT using the dynamic fluid body interaction (DFBI) method and an overset mesh technique under wind–wave excitation conditions. A good overall agreement was found between the CFD results and FAST data. Both codes used the quasistatic method for modeling the mooring lines. S. Gueydon et al. [
14] modeled a semi-submersible platform using the aNyPHATAS code to investigate operating rotor effects on drift motions and additional damping. Chen et al. [
15] modeled a semi-submersible FOWT with two different blade configurations in a wave basin to further optimize the blade design for FOWTs. A.J. Dunbar et al. [
16] developed an open-source CFD/6-DOF solver based on OpenFOAM and compared rotational and translational motions with FAST, demonstrating the accuracy of this tightly coupled solver.
The main purpose of this study was to conduct a virtual test of a real-scale 5-WM semi-submersible FOWT using the advanced CFD method. The hydrodynamic responses were validated using the latest physical test data of the Offshore Code Comparison, Collaboration, Continued, with Correlations (OC5) projects. Full-configuration FOWT simulations, simultaneously considering the rotating blade motion with 6-DOF platform dynamics were performed; a relatively large discrepancy in the predicted power was observed owing to the different properties of the mooring line and rotating inertia moment between the OC4 and OC5 projects. This proves the high infinity result of OC5 project. Further, this study may provide some reference for the validation of the CFD method for use in the OC5 Phase II system and high-fidelity simulation investigations of FOWTs in coupled aero-hydro conditions.
The OC5 DeepCWind semi-submersible floating wind turbine model was used for the investigation, which is briefly described in
Section 2. The numerical methods used in the study are introduced in
Section 3. The aerodynamic validation studies performed using different modeling tools are briefly presented in
Section 4.
Section 5 presents the results of the dynamic responses of the floating system under regular wave conditions.
Section 6 presents the simulation results of the fully coupled configuration.
Section 7 presents the conclusions of the study.
6. Fully Coupled Wind–Wave Simulation
The full-scale DeepCwind OC5 model in a coupled wind–wave excitation condition was finally conducted using the DFBI method mentioned above.
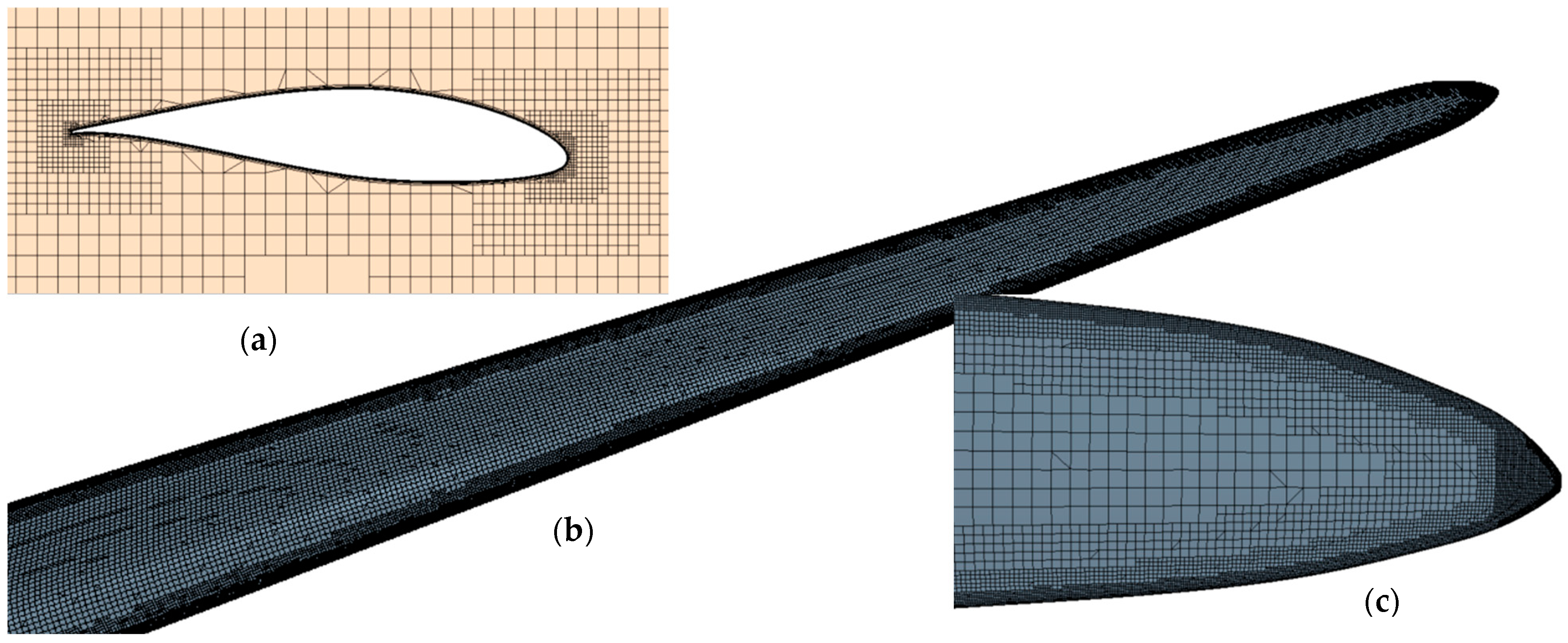
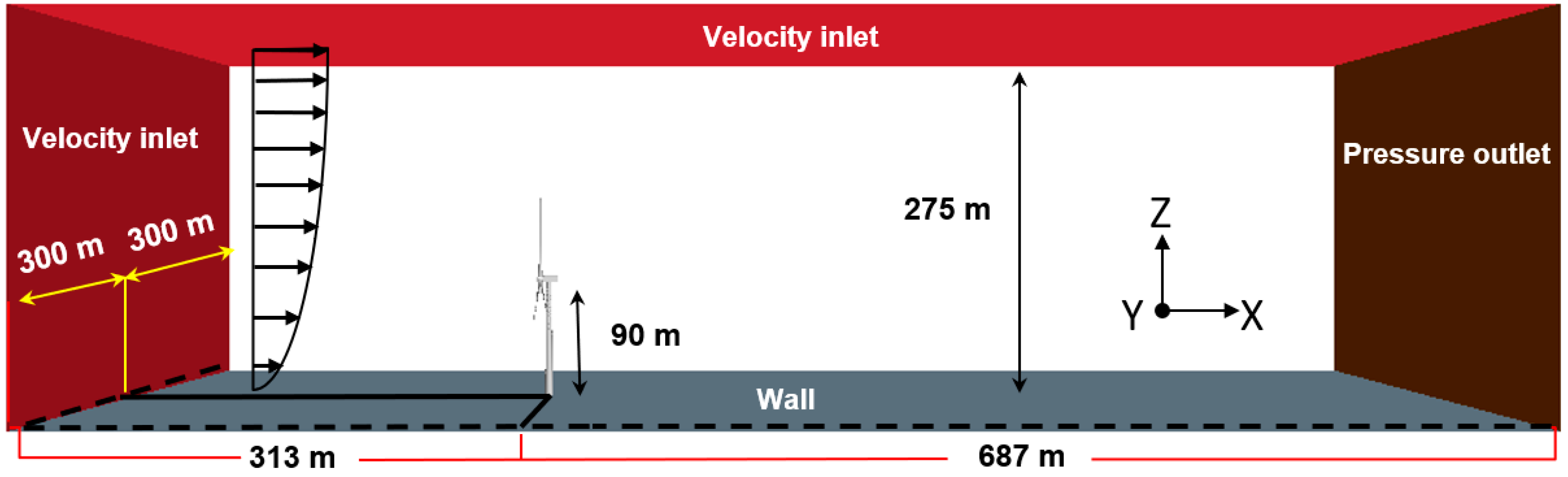
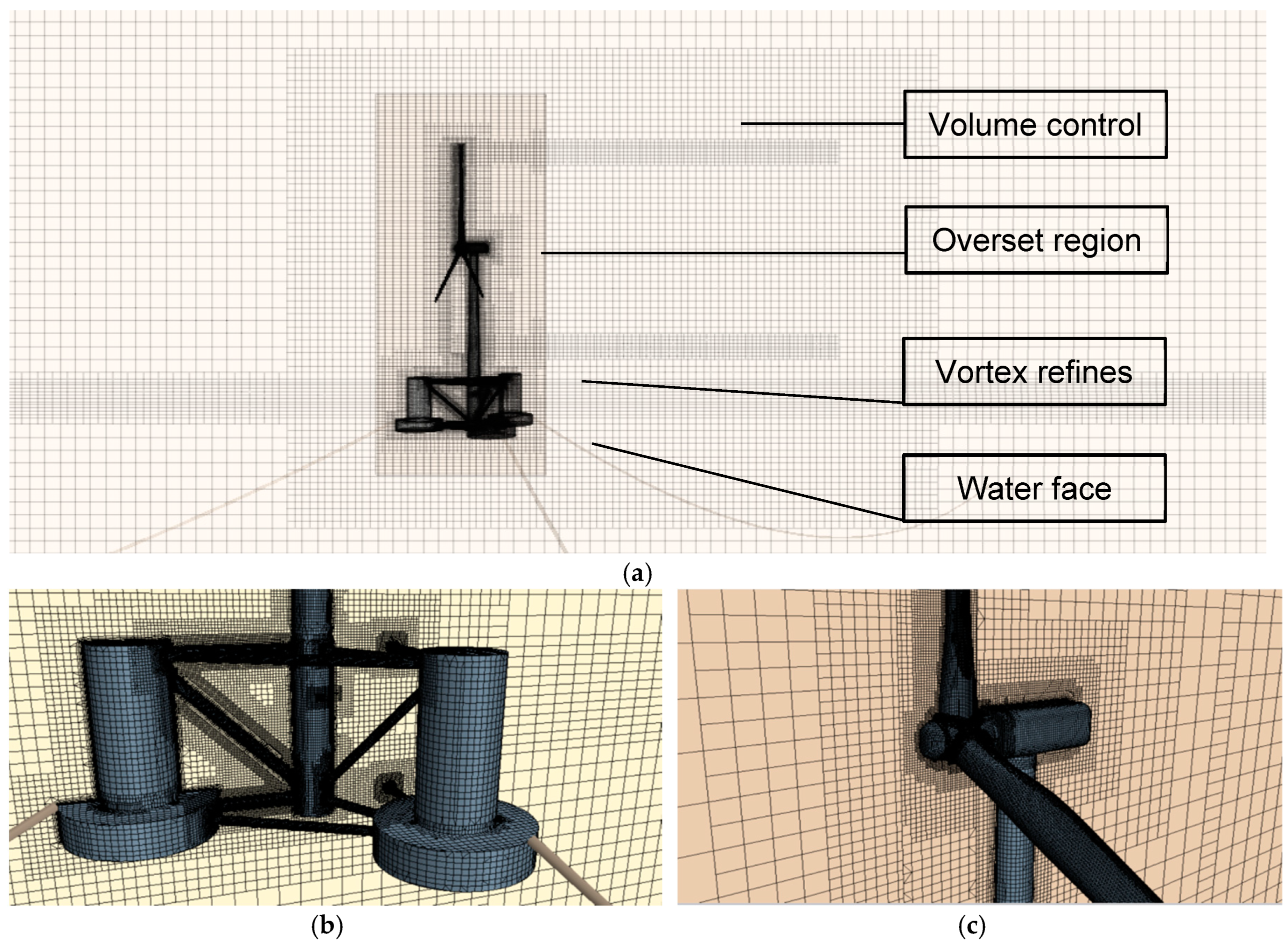
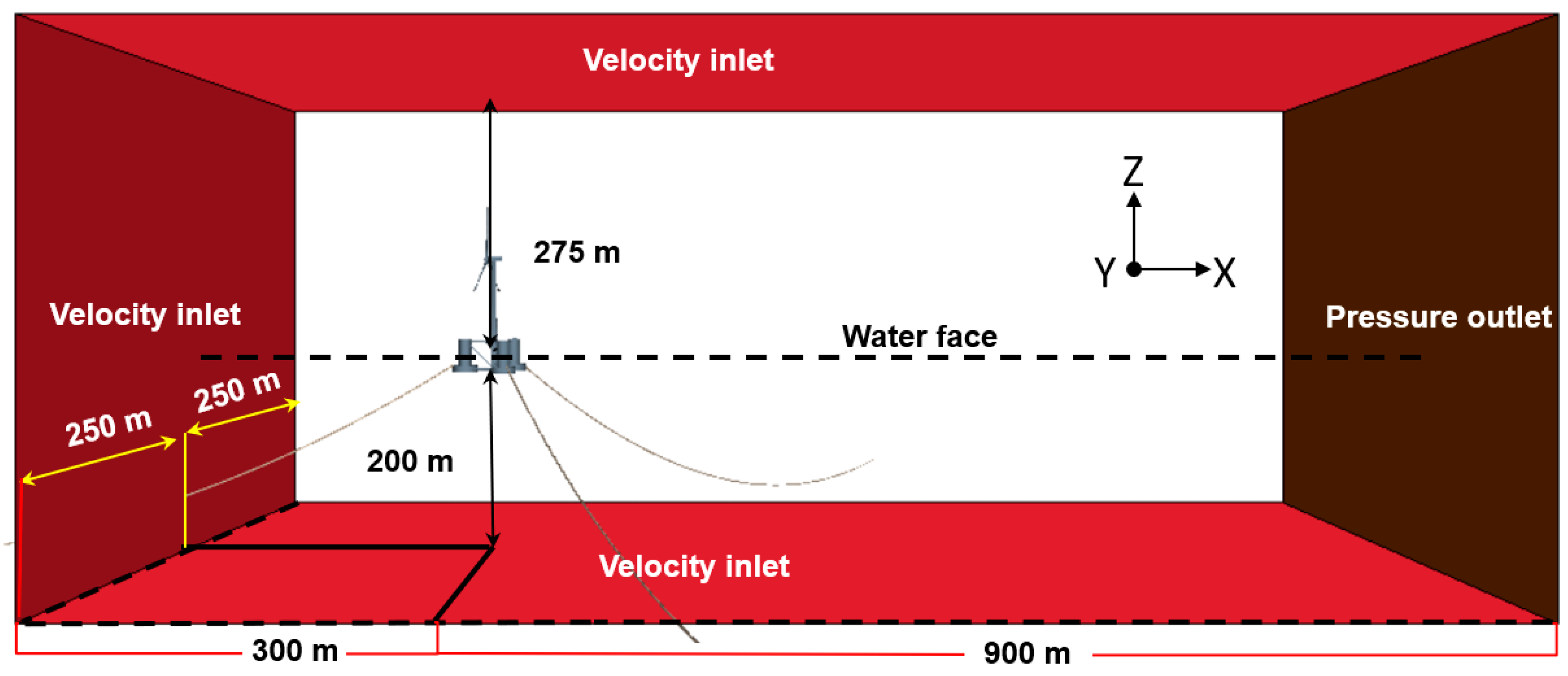
Figure 10 shows the fluid domain, together with an xz-plane section of the mesh distribution in the whole fluid domain. To obtain the fluid details near the free surface, as well as those near the turbine blade tip and vortex regions after the tower, mesh refinement was performed around the blades and platform, as shown in
Figure 11. Nearly 27 million cells were generated using the built-in trim mesh feature in STAR-CCM+. The wind speed, V, was assumed to be the rated wind speed (11.4 m/s); the wave height and wave period were assumed to be 7.58 m and 12.1 s, respectively, similar to the MARIN wave basin.
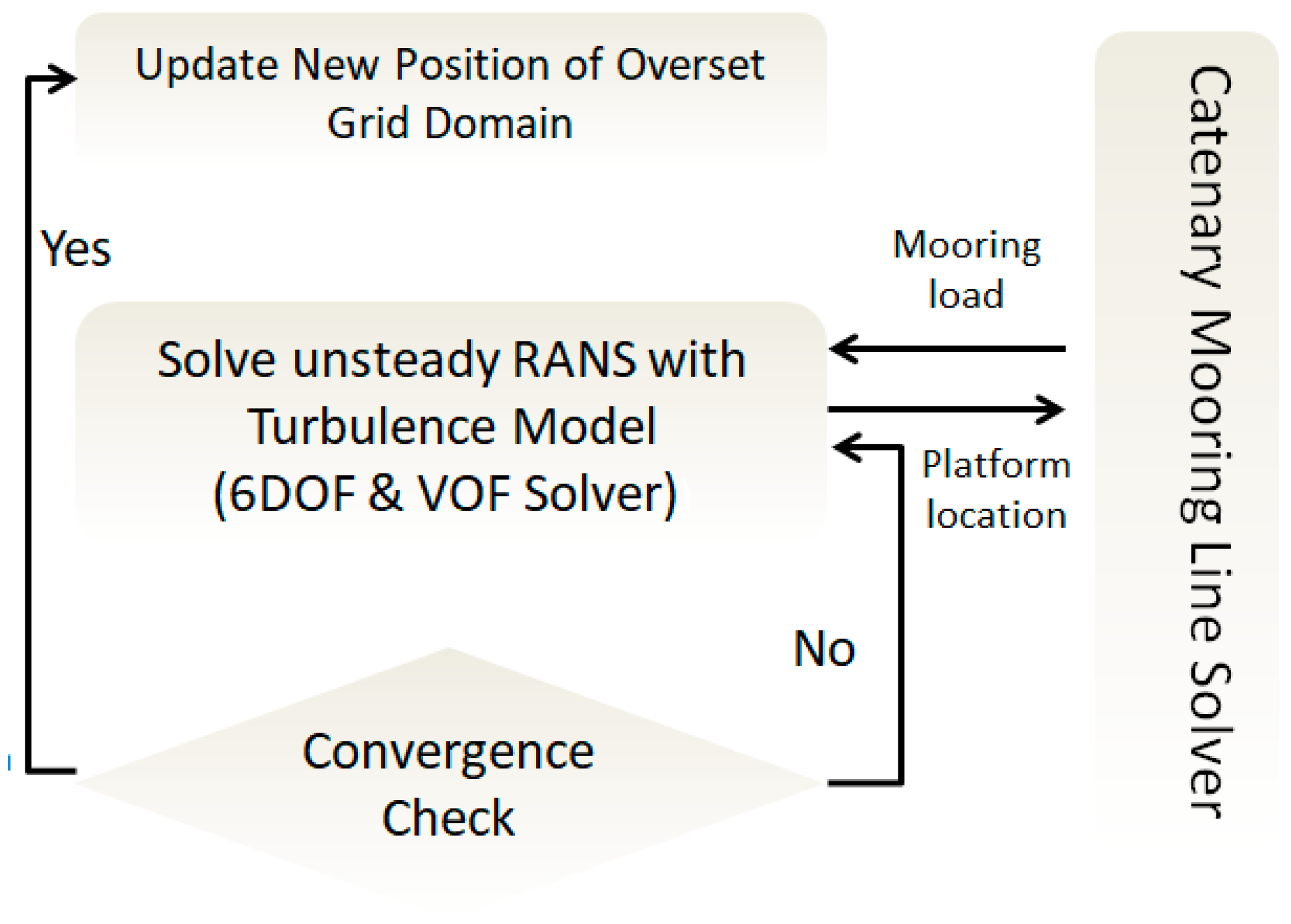
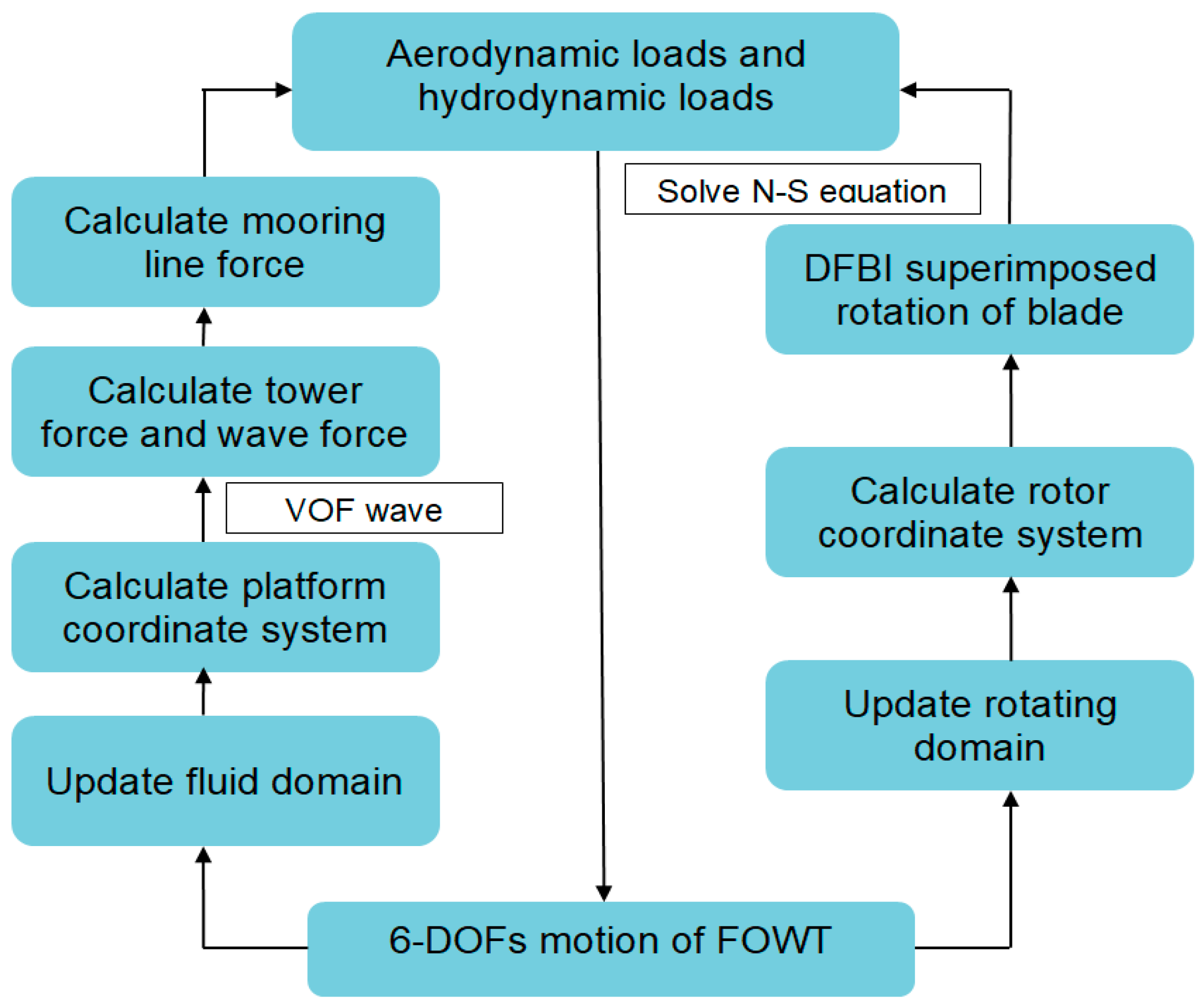
After a 10 s start-up time, the aerodynamic output for the wind turbine was stabilized and the platform was released to move. A computational flow chart for the FOWT is presented in
Figure 12.
The time for one revolution of the blades with a rotation speed of 12.1 rpm is 4.96 s. The time-step size (dt) of 0.07009 s utilized here corresponds to a 5° increment in the azimuth angle of the blade for each time-step. The wave heading angle is 0° and the wave is parallel to the direction of mooring line 2, which is also parallel to the platform surge direction.
All computations of the FOWT considering the wind–wave coupling were performed using a 4U multi D500 server. The elapsed real central processing unit (CPU) time for parallel processing per time-step with 15 sub-iterations was 6 min when using 66 CPUs. The total number of iterations for a simulation runtime of 300 s was approximately 30,000. The total simulation time taken to obtain the results using 66 CPUs was 20 days.
Figure 13 demonstrates the vortex contours with 0.5 Q-criteria, colored according to the velocity magnitude component, where the free surface is colored according to the surface elevation. After post-processing, as easily observed in the figure, strong vortices appear near the blade tips and roots. The presence of the tower caused a complex flow wake because of the interaction between the tower and flow. Such a detailed flow map is useful to identify the means for improving the wind turbine power output in the design stage.
This is an advantage of the CFD method, which is not present in other codes such as FAST. The size of the vortex tubes gradually decreases with time, and the patterns can be described by an iso-vorticity value. Herein, one wave period is separated into eight steps, i.e., T1 to T8; the duration from T1 to T8 represents one period of the platform surge motion. When the wind turbine moves backward, the number of vortex tubes increases, and the gaps between the blade tip vortices tend to continuously decrease at the same time.
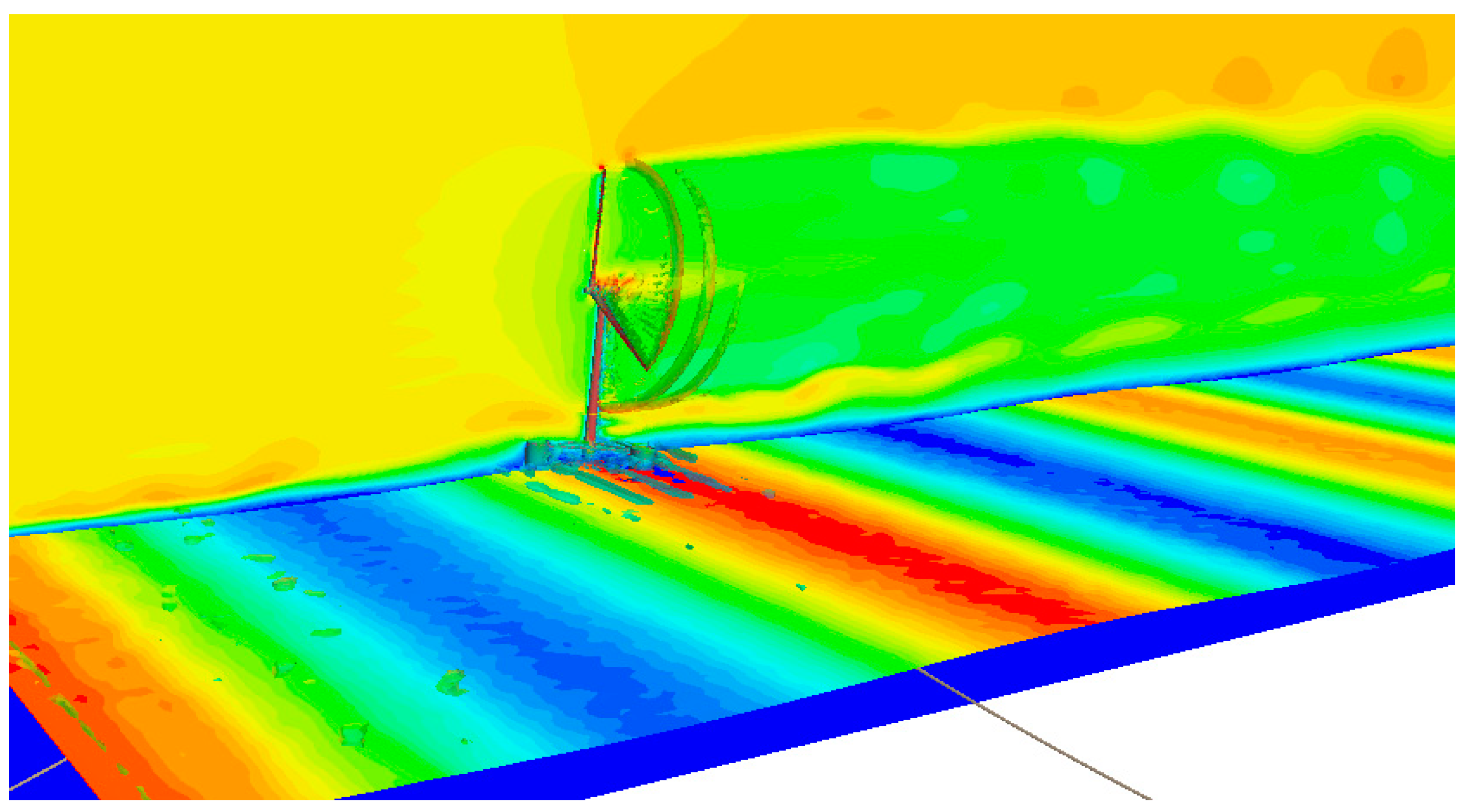
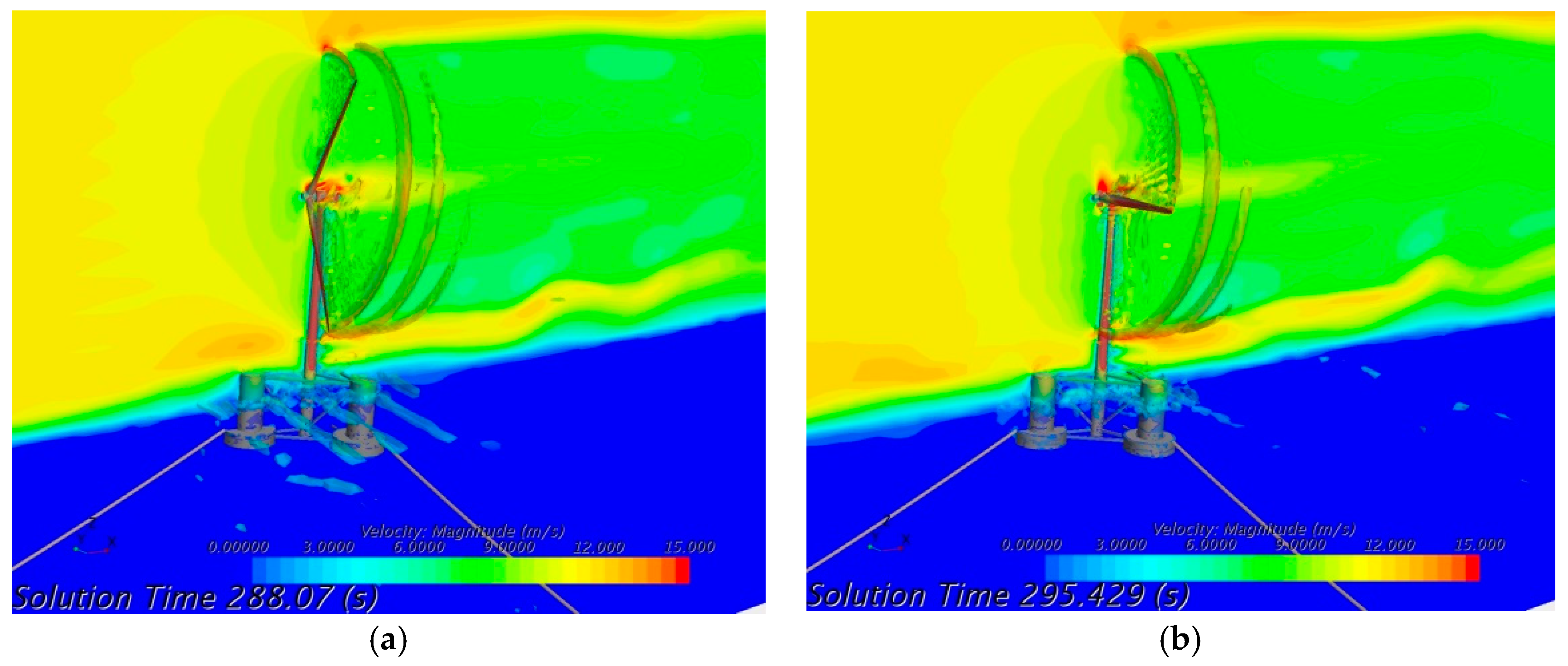
Figure 14 shows the fluid field and turbulence wakes between the fluid and tower and nacelle during the platform surge motion at different times. It shows that the generated vortexes near the tower and nacelle configurations diffuse outward as the platform moves backward, and vice versa.
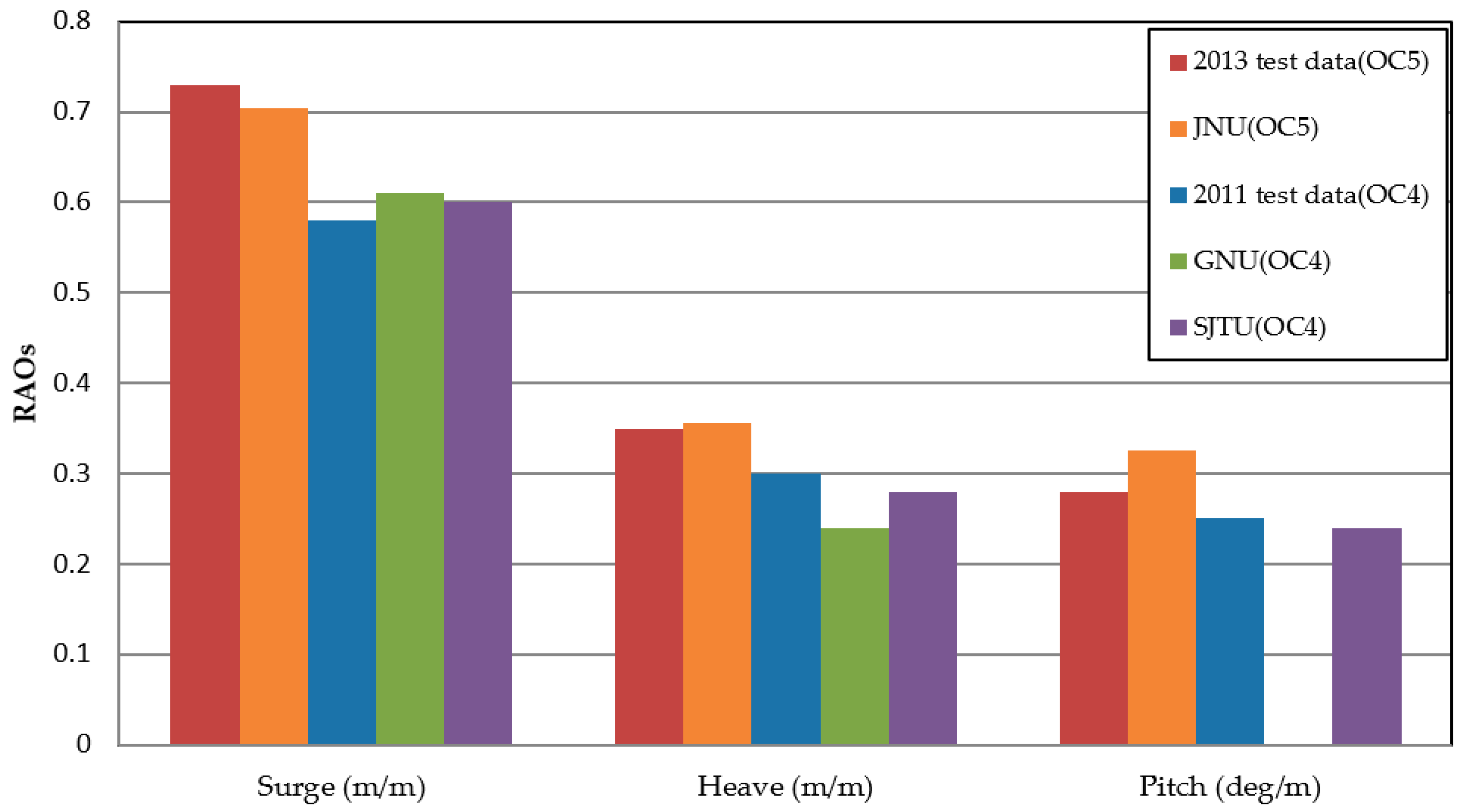
The RAOs of surge, heave, and pitch in the fully coupled configuration under wind–wave excitation conditions are given in
Table 7. Compared to the result of the regular wave test, where only regular waves exist, under a no-wind condition some discrepancies can be observed. The motion RAOs and the time-average values over the last four wave periods for 3-DOF were compared. Due to the unavailability of MARIN test data for the wind and wave conditions simulated herein, the comparison was only performed with the result from a previous study. All the 3-DOFs, i.e., heave, surge, and pitch showed small amplitudes compared to the results of the regular wave test without wind conditions. The incoming wind from the x-direction obviously has a significant effect on the restoring force of the mooring line; hence, the FOWT system cannot be restored to the equilibrium position as in the regular wave test. The incoming wind increased the aerodynamic thrust towards the floating system and pushed the platform further away in the backward direction, also leading to an increase in the mean surge. Nevertheless, the close agreement between the results for the 3-DOFs demonstrates the capability of this method.
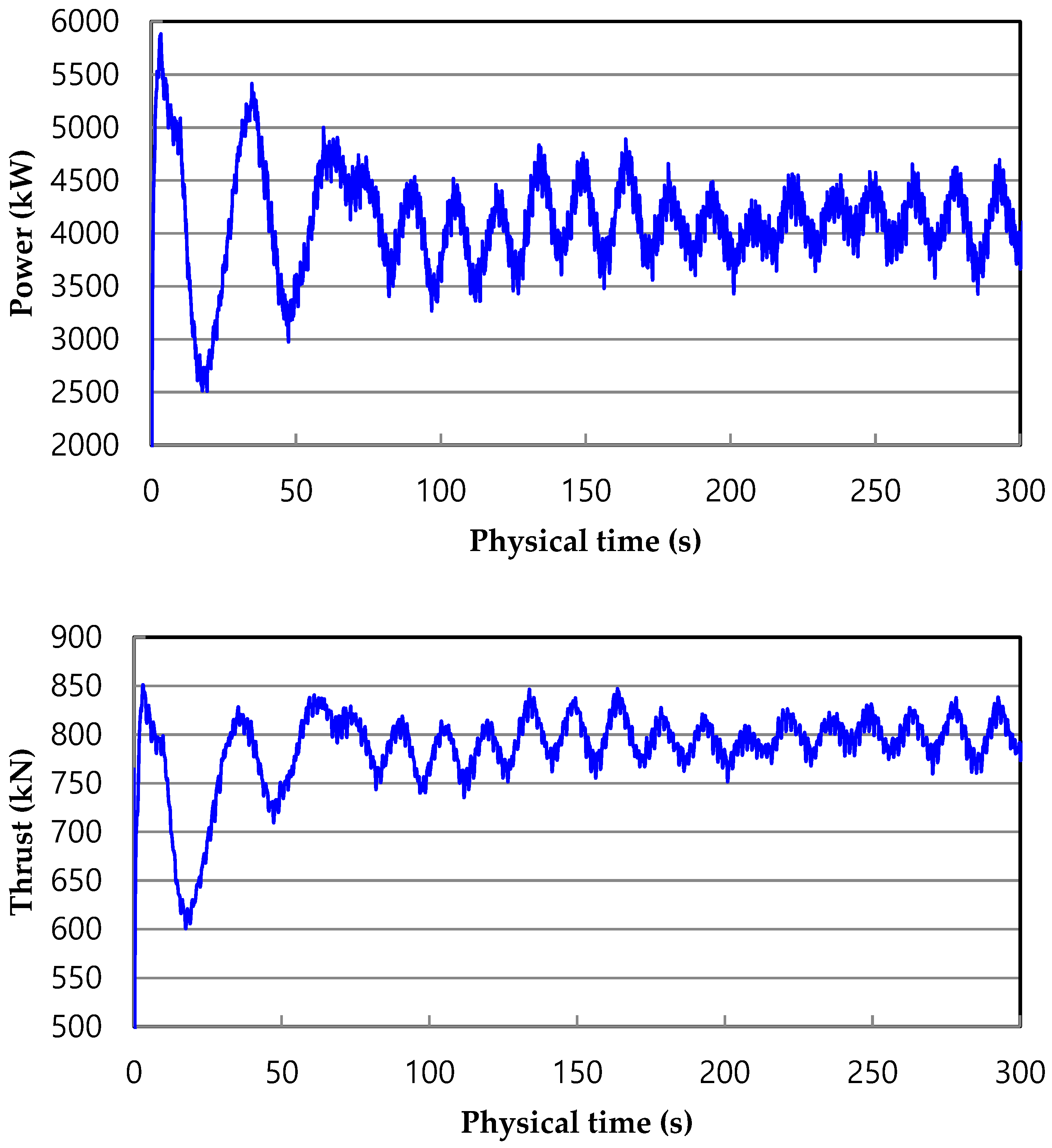
Thrust and power are two critical aerodynamic performance factors for evaluating a wind turbine. Thrust is defined as the integrated force component normal to the rotor plane. The power output and thrust force time-histories for the coupled simulation are presented in
Figure 15 along with the dynamic responses of the pitch motion rate of the platform.
The response curves of power and thrust act at the same frequency as the incident wave. Due to the tower shade effect, the curves of power and thrust force exhibit periodical fluctuations with a period of 120° for the blade rotation. However, the effect of tower dam effects on the power output of the wind turbine is less than 5%. The variation of pitch motion also acts at the same frequency as the inlet wave. When the platform moves in the upwind direction, the power output and thrust force both increase, while the aerodynamic load decreases as the sign of the pitch motion changes. This is because the upwind pitch motion of the FOWT increases the relative velocity between the wind turbine and the inlet wind, and the angle of attack for each blade section increases correspondingly.
The dynamic responses of the wind turbine performance and typical platform motions after 300 s of the simulation are presented in
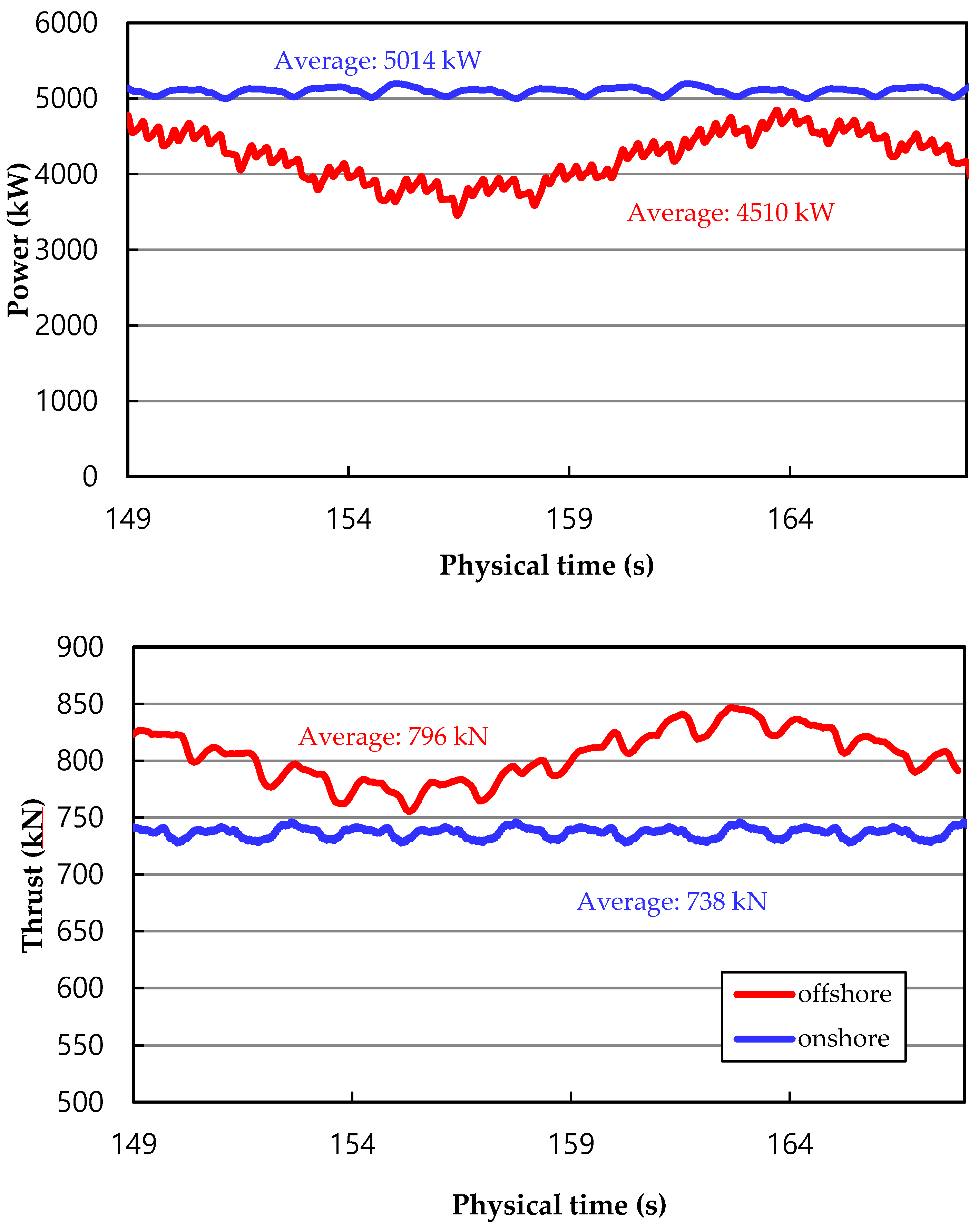
Table 8. The power output varies from 3446 kW to 4698 kW at a rated wind speed. The variation in power is larger than that in the thrust force, that is, the power output is more sensitive than the thrust force to platform motion. Then, aerodynamic performances of the onshore fixed wind turbine and offshore floating wind turbine were compared and the average thrust value was calculated over the last four periods. In the case of thrust, a 7.8% increase was observed in a floating offshore turbine, the floating offshore wind turbine had an average thrust around 796 kN and the onshore wind turbine had an average thrust of 738 kN, which indicated a relatively small load on the hub and blades. This is because of the thrust force acting on the top of the tower, meaning the platform always moves in the upwind direction to offset the capsizing moment induced by the thrust force. In the case of the power curve, the average power value was calculated over the last four periods. A 10% decrease was observed in the floating offshore wind turbine, which is likely due to the smaller project area and relative income wind speed when the platform pitches, as shown in
Figure 16. Accordingly, the platform surges from 7.9 to 9.8 m, which is also due to the thrust force that must be offset by the mooring line tension.
7. Conclusions
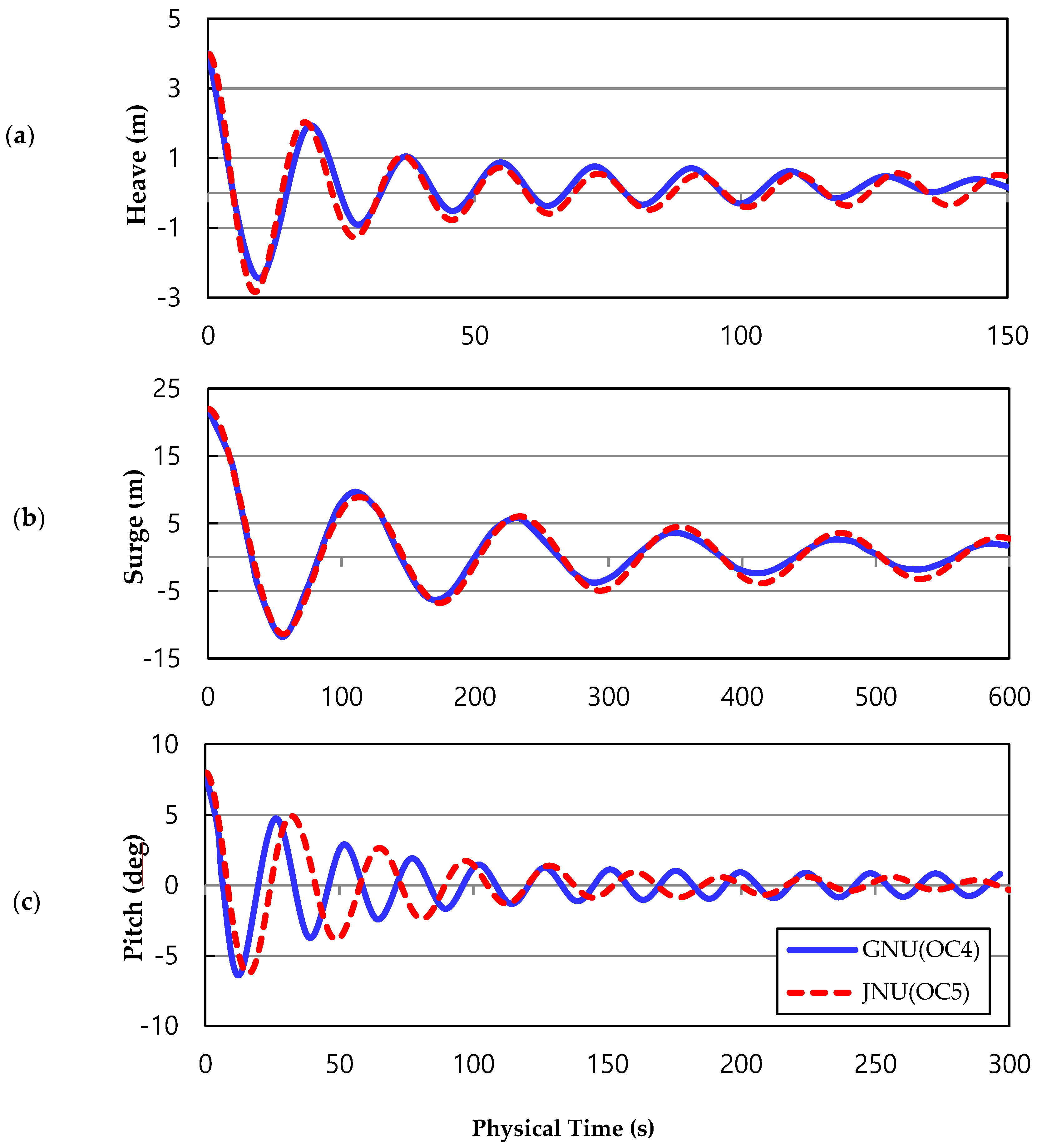
This investigation performed a CFD numerical analysis for a semi-submersible-type FOWT used in Phase II of the OC5 project, by advanced DFEI method and overlap mesh techno ledge. The full-configuration FOWT in a wind–wave excitation condition has been successfully performed, with simultaneous consideration of the wind turbine movement due to 6-DOF platform dynamics. The RAOs of the surge, heave, and pitch were compared to MARIN test data and data reported in previous studies when only the wave condition was considered. A slight discrepancy was observed between the CFD studies with regard to the pitch, possibly because of the different physical properties of the platform and mooring lines in the OC4 and OC5 projects. There was a relatively large discrepancy in the hydrodynamic response, which can induce large deviations in the prediction procedure. Particularly, pitch natural period showed a 21% discrepancy between OC4 and OC5 projects, as indicated by the results of the free decay test of the pitch and the numerical discrepancy in the RAOs in the regular wave test.
Besides, unsteady blade-tip vortices and strong flow interactions with the turbulent wakes of the tower due to the surge motion of the platform were successfully simulated and visualized using the advanced DFBI and VOF methods. The power and thrust force of the FOWT increased when the floating platform moved in the upwind direction, while the aerodynamic loads decreased as the pitch motion reversed direction. This can be explained by the variation in the angle of attack for each blade section when the FOWT system experiences pitch motion. All the 3-DOFs, including heave, surge, and pitch had smaller amplitudes compared with the results in the regular wave test without wind conditions. Incoming wind from the x-direction obviously has a large effect on the restoring force in the mooring line, and, as a result, the whole FOWT system cannot be restored back to the equilibrium position as in the regular wave test.
In addition, a relatively heavy load on the hub and blades was observed for the FOWT compared with the onshore wind turbine. This is because of the thrust force acting on the top of the tower, due to which the platform moves in the upwind direction to offset the capsizing moment induced by the thrust force. With regard to the power curve, a 10% decrease was observed for the floating offshore wind turbine, which is likely due to the smaller project area and relative income wind speed when the platform experiences pitch motion. Overall, there is a greater variation in the power than in the thrust force, that is, the power output is more sensitive than the thrust force to platform motions.
Until now, all published papers based on an OC4 project which was carried out in 2013 (this was code-to-code comparison project 5 years ago), which found a large discrepancy from the experimental test data of the OC5 project. This study could be a good insight for future studies, as there has not been any specific CFD research based on OC5 test data until now. Examination of the OC5 Phase II project, with a computational fluid dynamics code (which has a higher-fidelity model of the underlying physics), could help determine if there are some deficiencies in the hydrodynamic models being employed by participants in an OC5 code-to-test project [
18].




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}