Dynamic Long Short-Term Memory Neural-Network- Based Indirect Remaining-Useful-Life Prognosis for Satellite Lithium-Ion Battery



Abstract
:1. Introduction
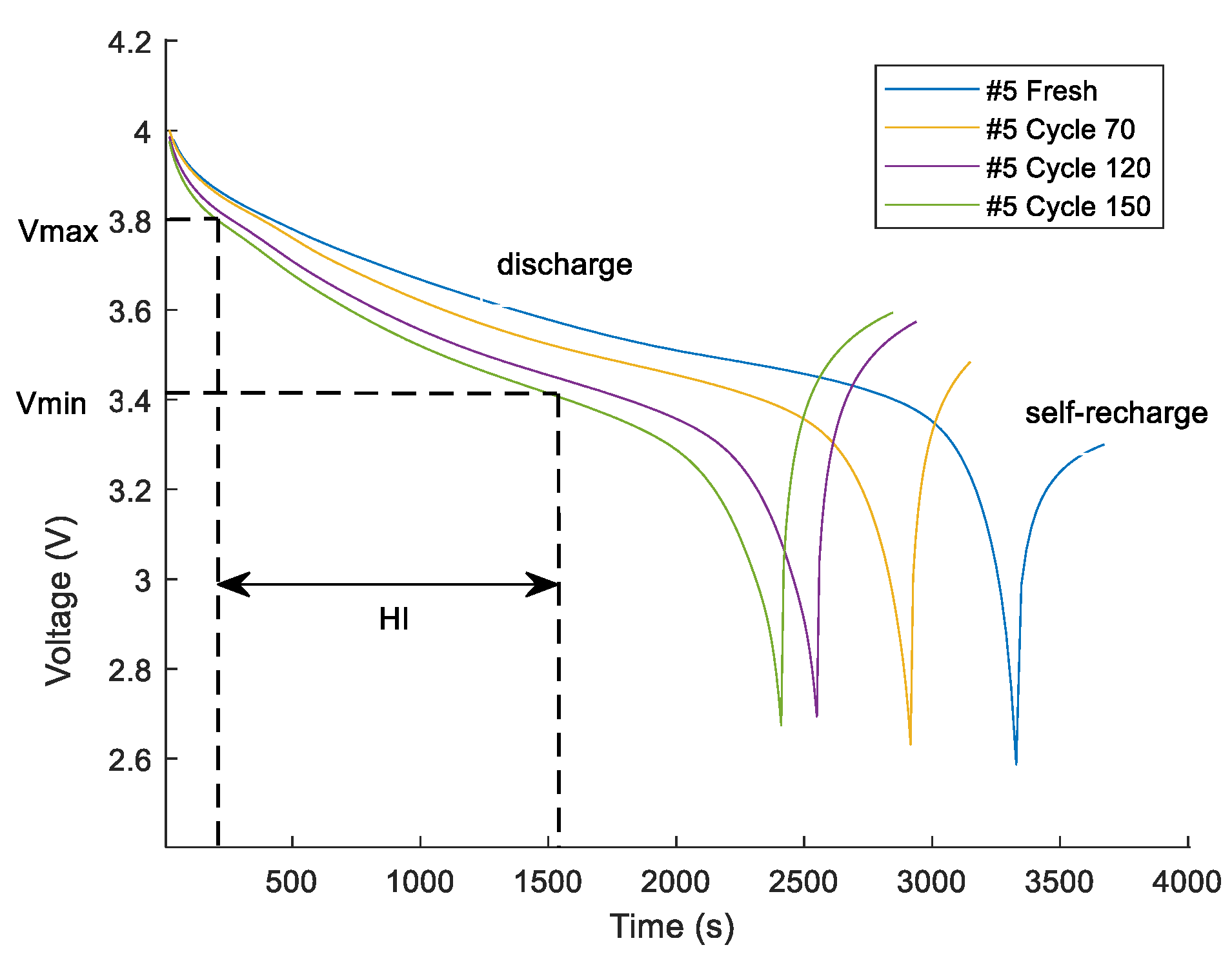
- For measured discharge voltages, a novel polynomial-fitting-based HI is constructed to replace Li-ion capacity for Li-ion battery RUL prognosis.
- Considering on-line and multi-step prediction, a DLSTM with the Adam method, L2 regularization method, and incremental learning idea is proposed.
2. Data Analysis and Problem Statement
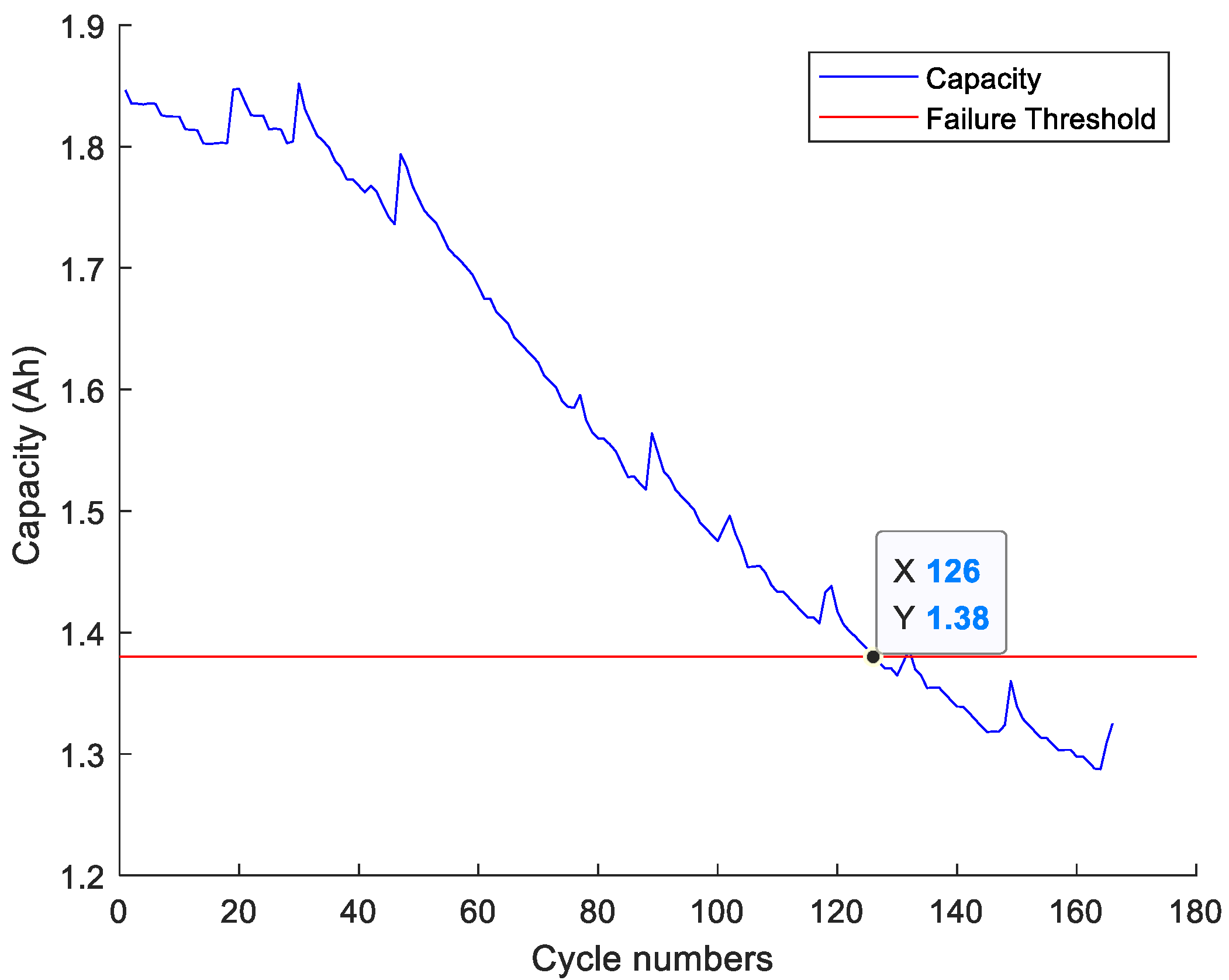
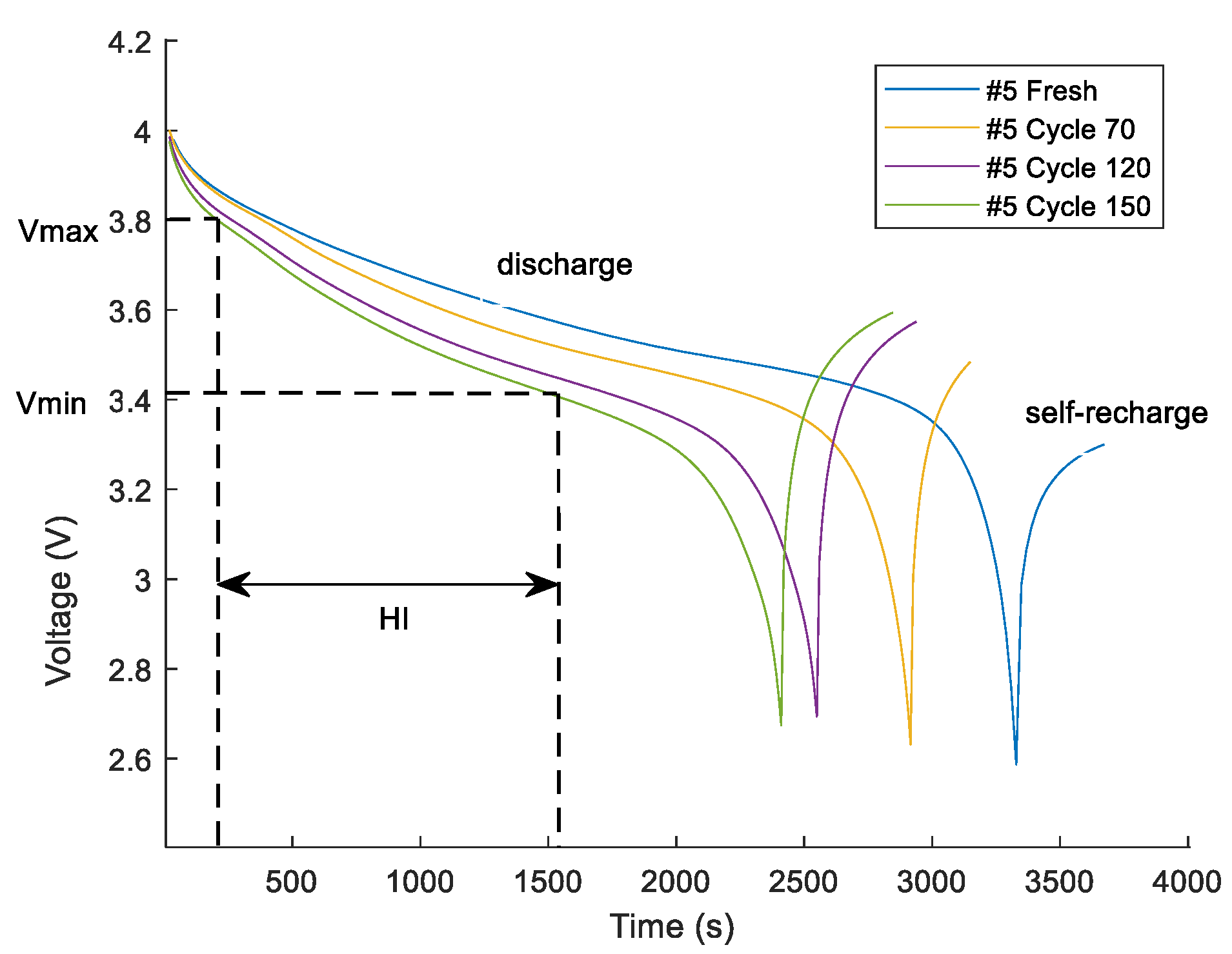
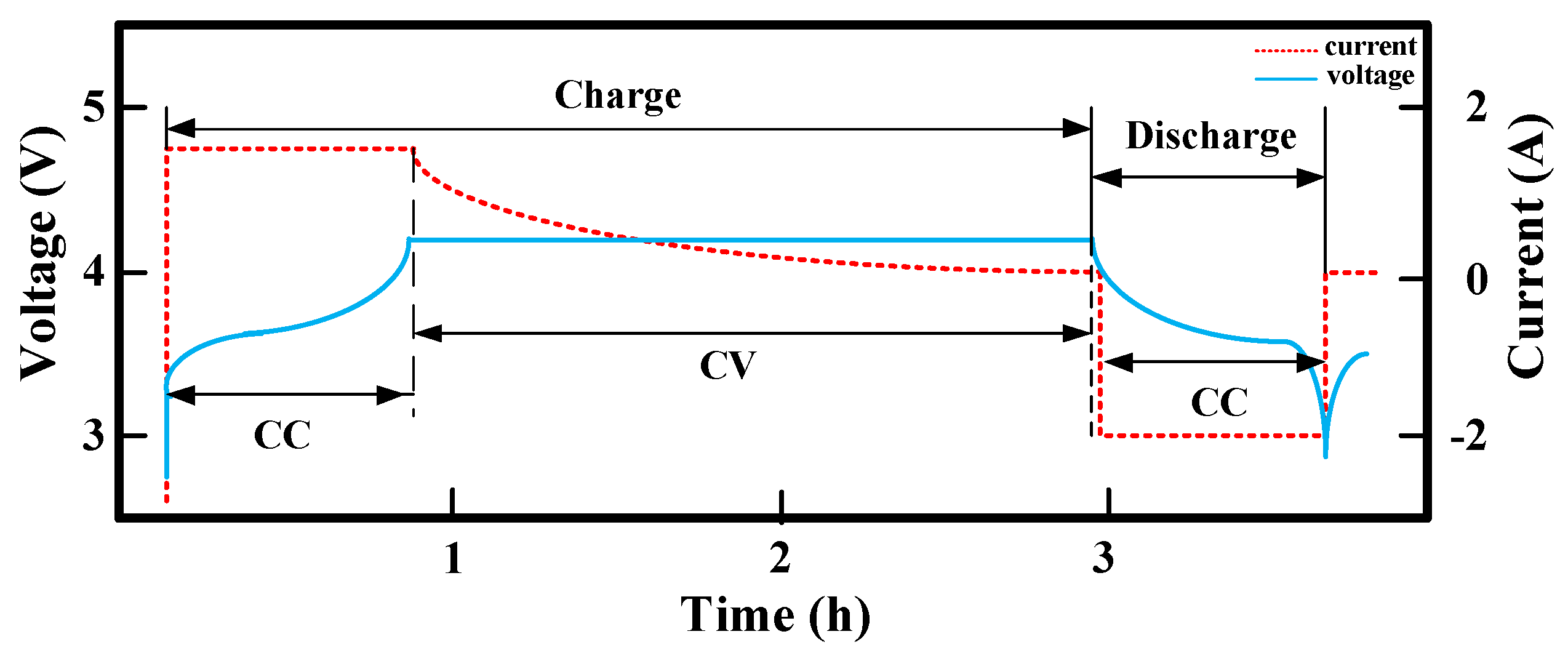
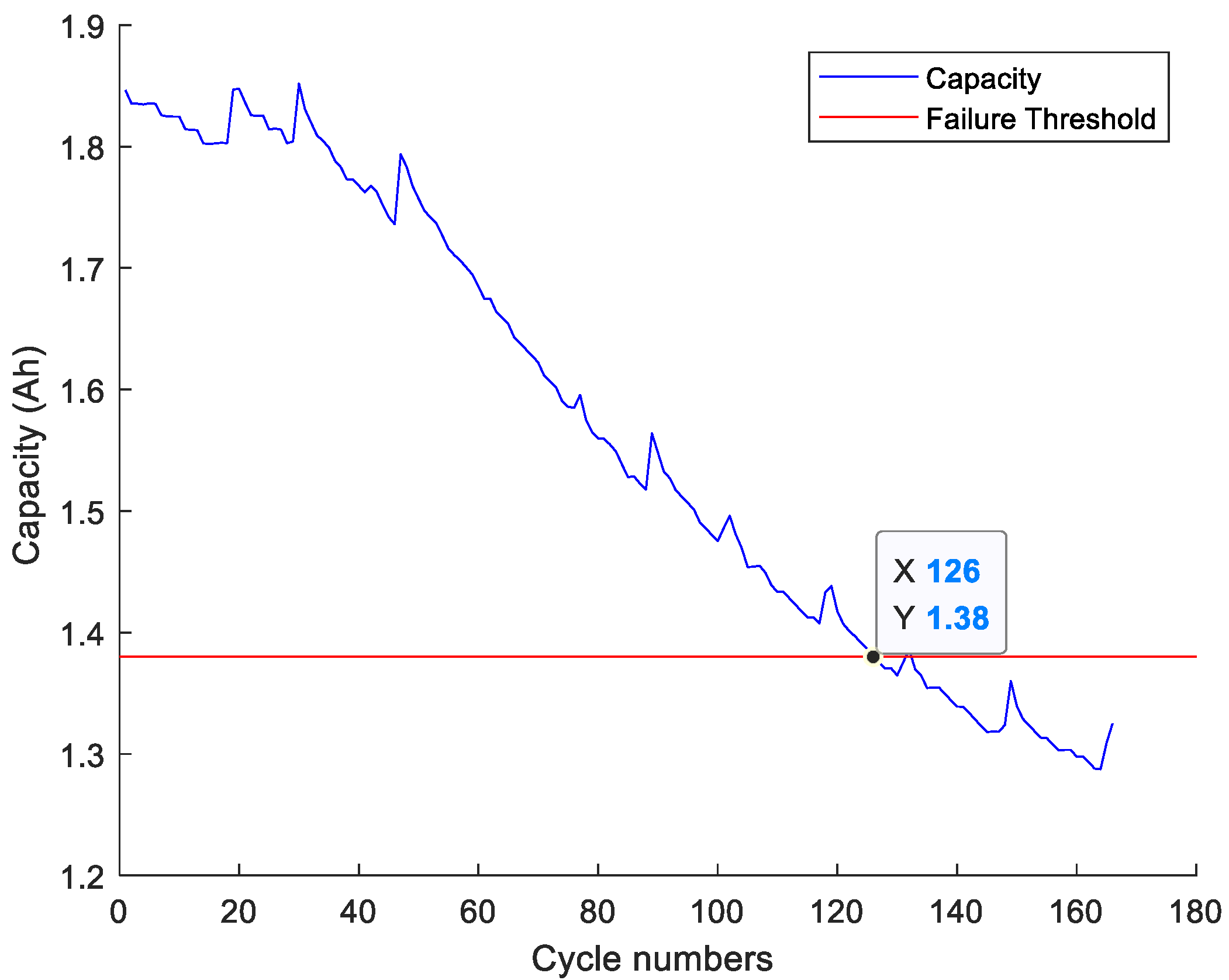
2.1. Li-Ion Battery Data Analysis
2.2. Problem Statement
3. DLSTM Based Indirect RUL Prognosis
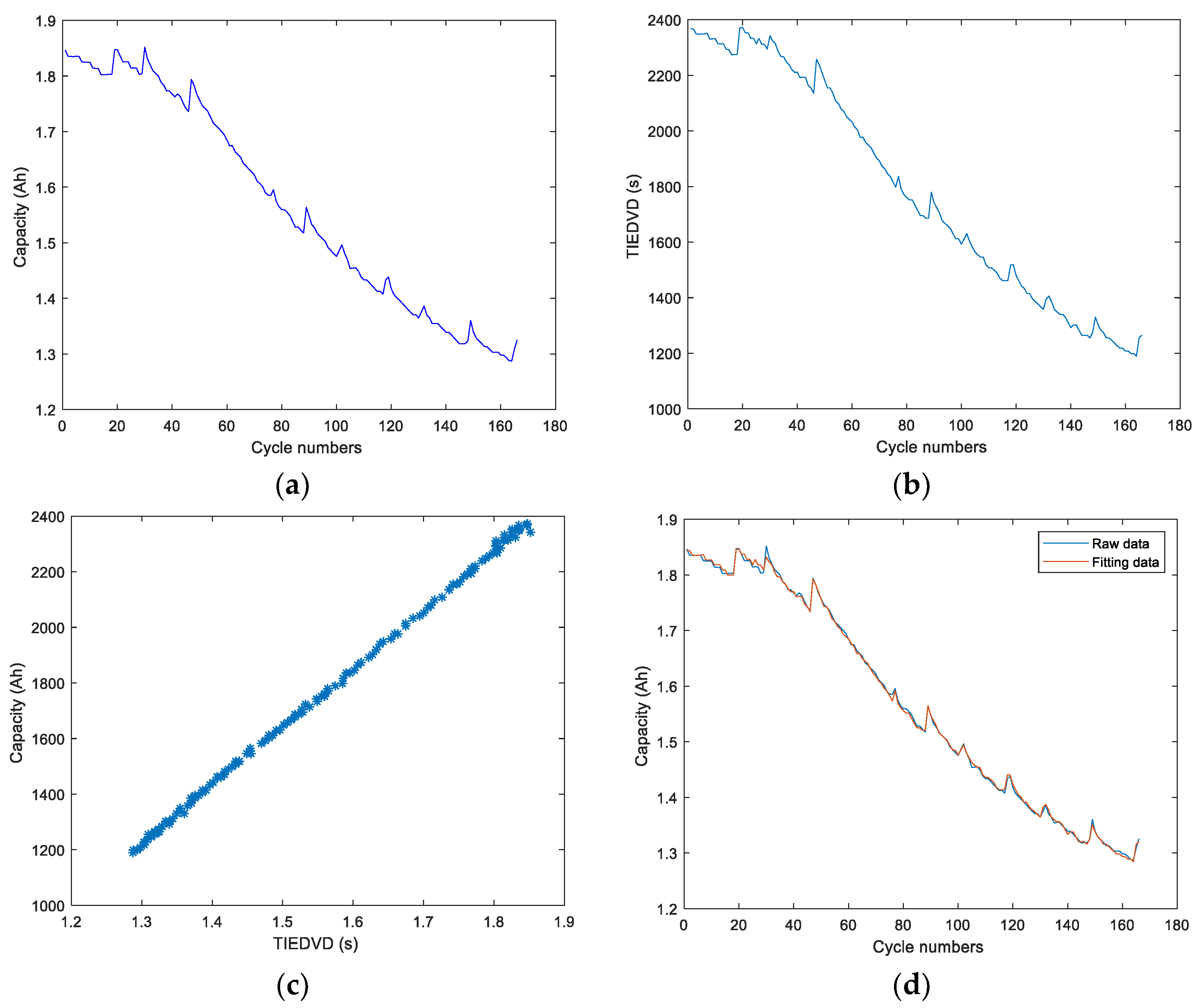
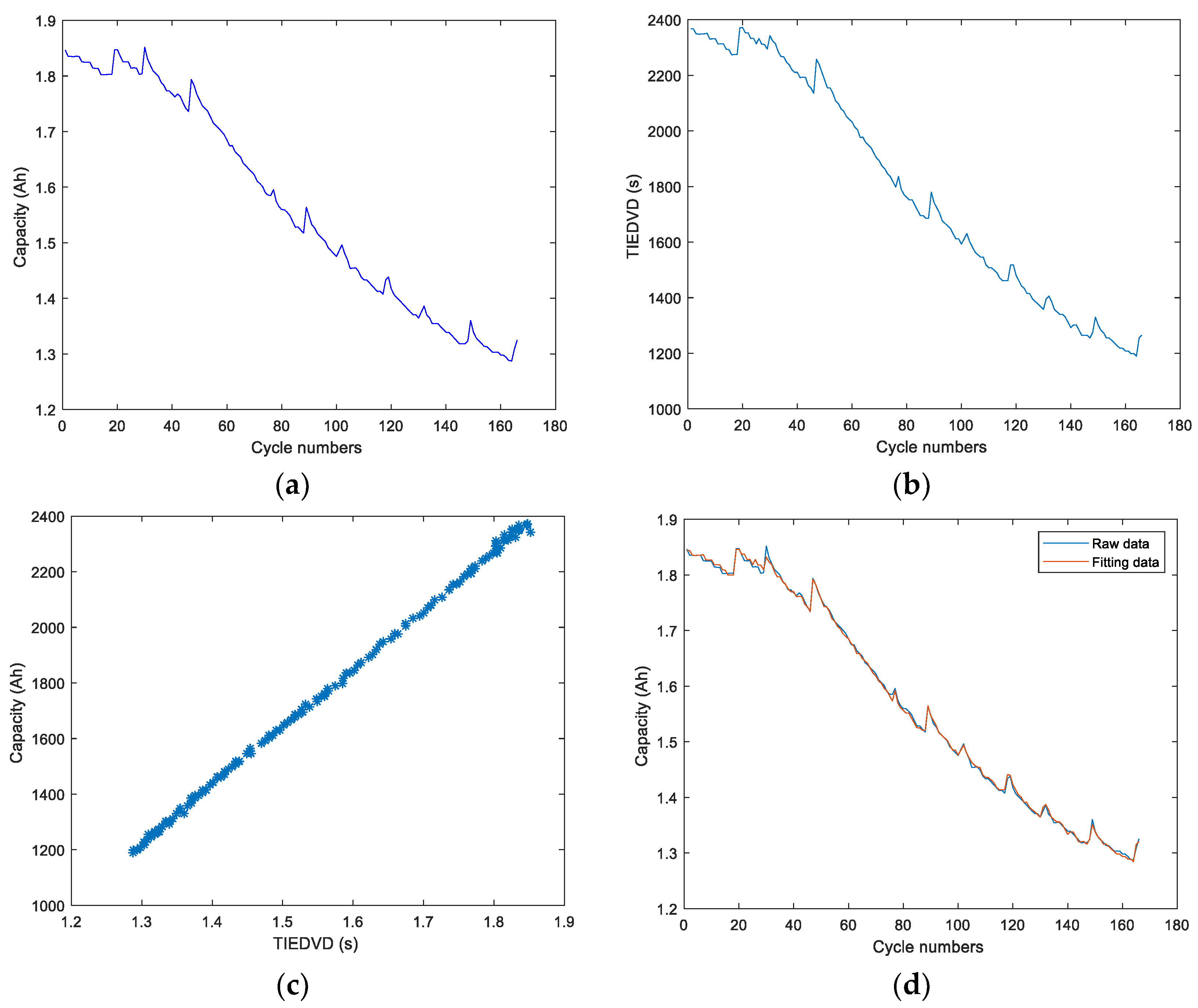
3.1. Polynomial Fitting Based HI
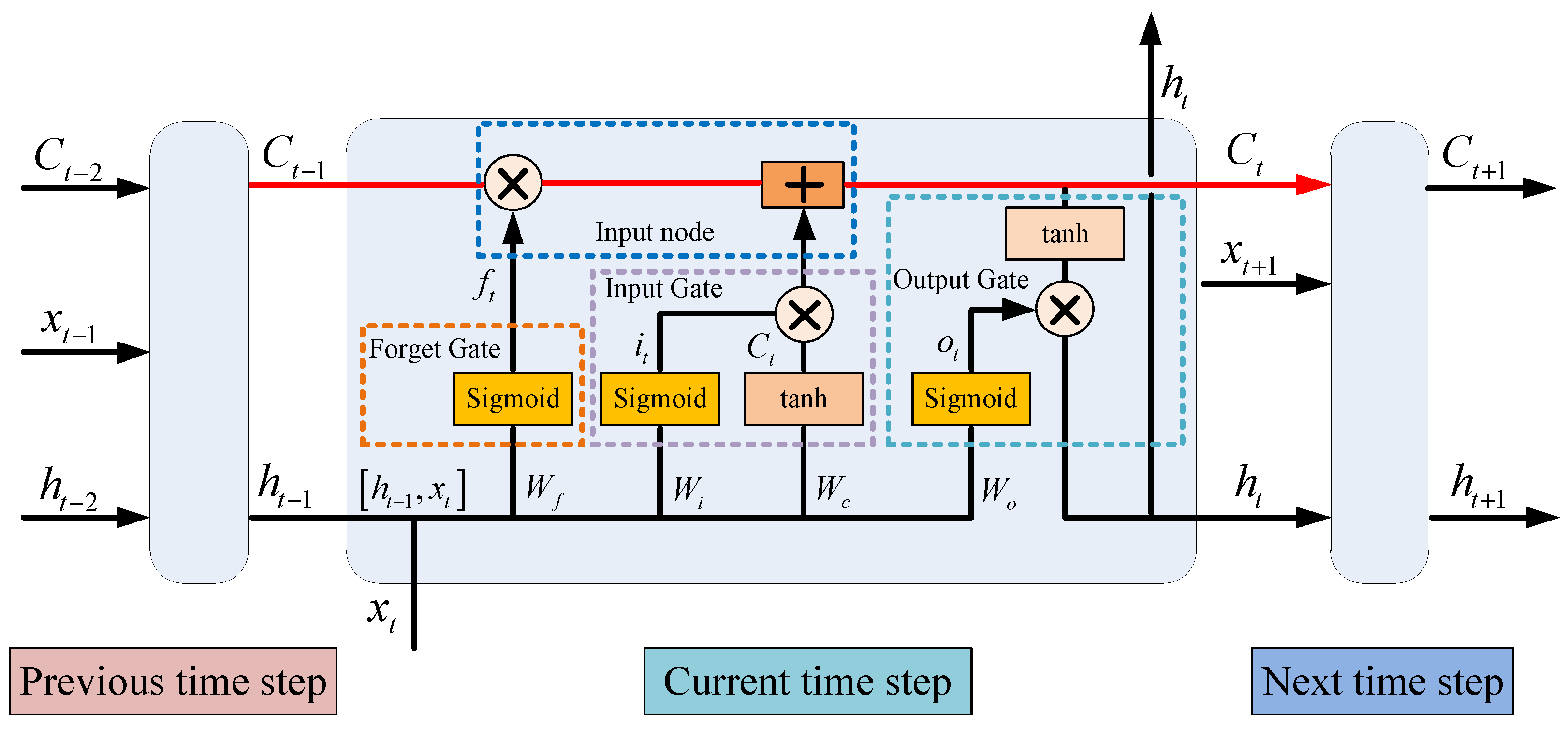
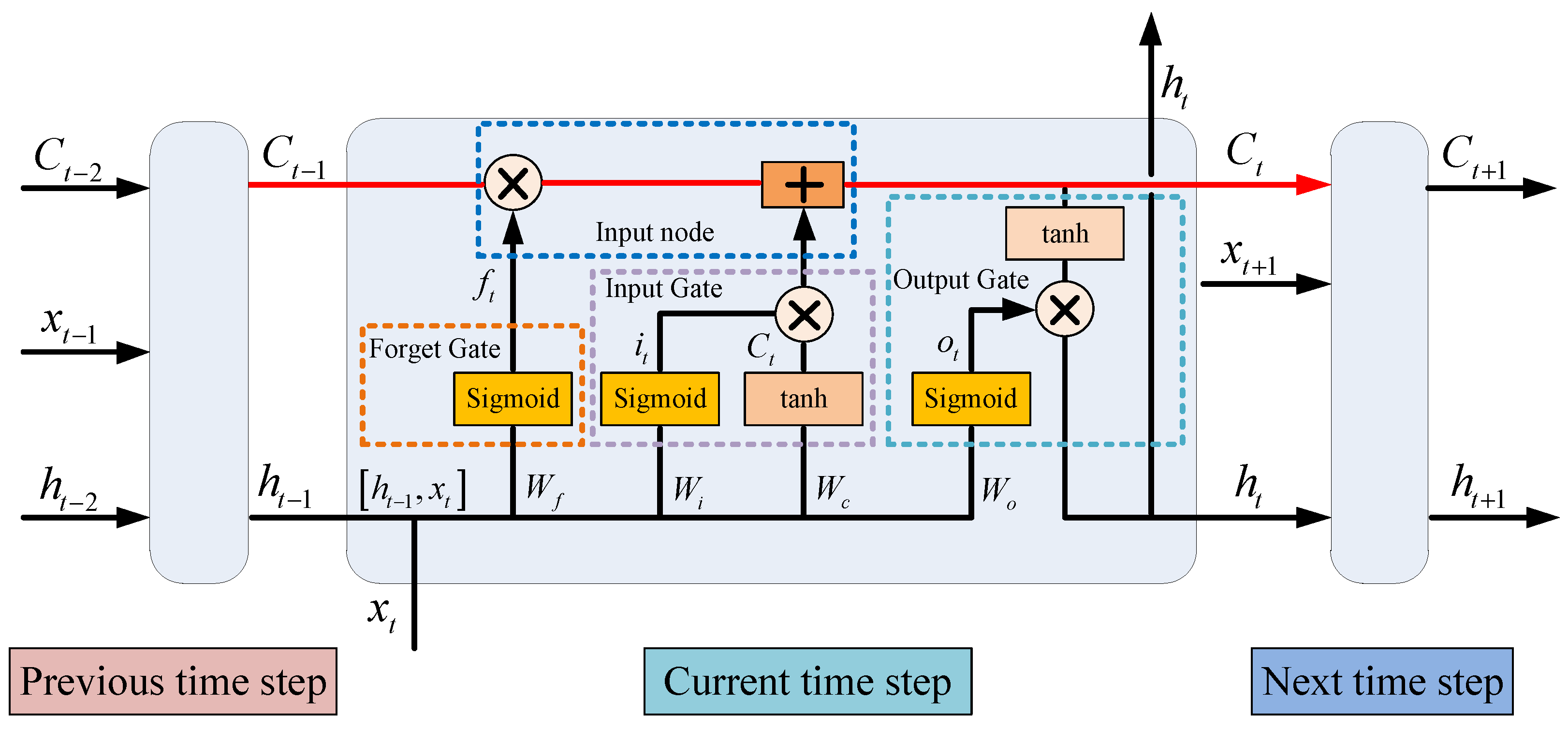
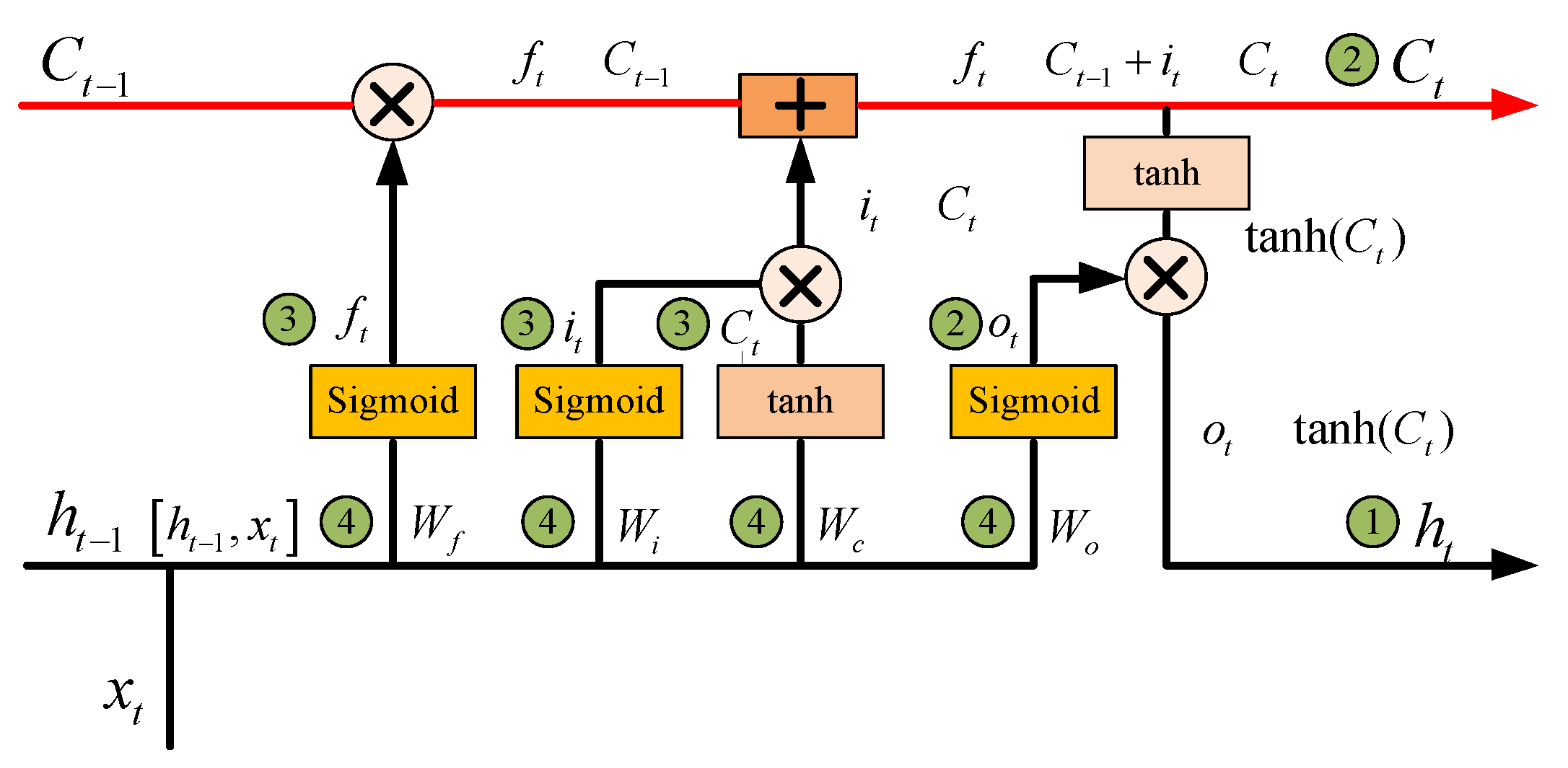
3.2. DLSTM for RUL Prognosis
3.3. Evaluation Criterion
4. Verification
4.1. Indirect HI Construction
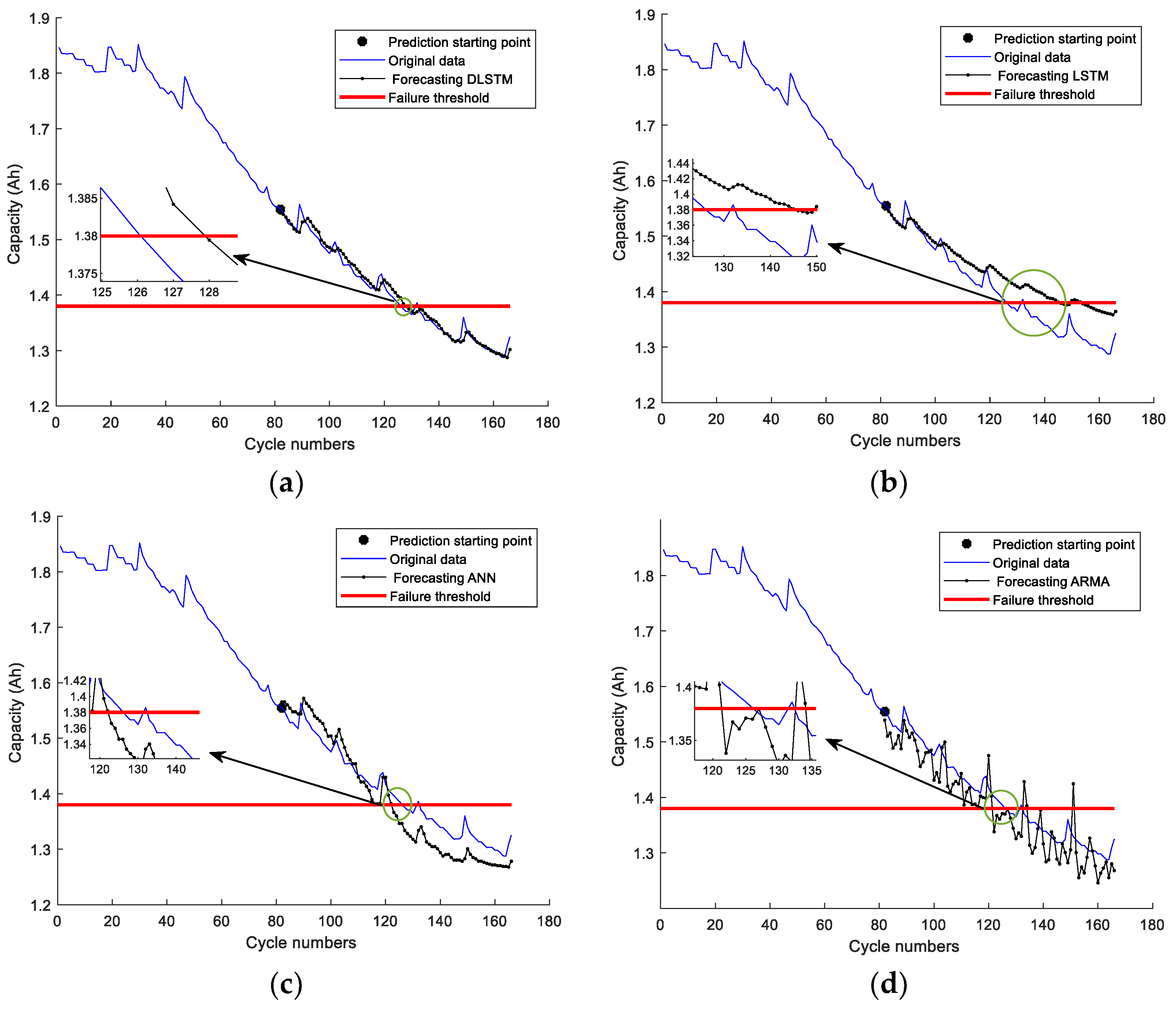
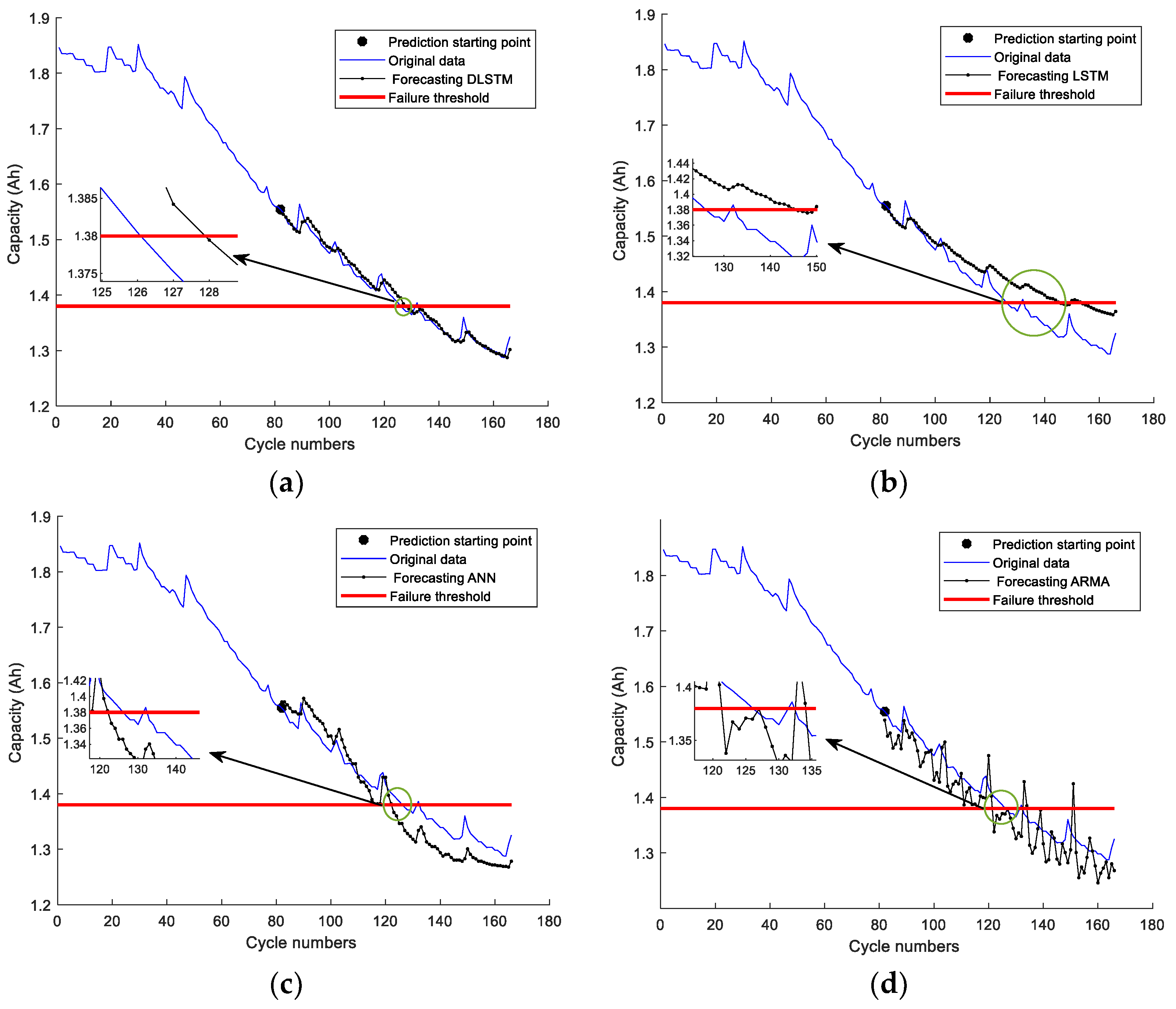
4.2. Li-Ion Battery RUL Prognosis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Song, Y.; Liu, D.; Yang, C.; Peng, Y. Data-driven hybrid remaining useful life estimation approach for spacecraft lithium-ion battery. Microelectron. Reliab. 2017, 75, 142–153. [Google Scholar] [CrossRef]
- Vetter, J.; Novák, P.; Wagner, M.R.; Veit, C.; Möller, K.C. Ageing mechanisms in lithium-ion batteries. J. Power Sources 2005, 147, 269–281. [Google Scholar] [CrossRef]
- Javed, K.; Gouriveau, R.; Zerhouni, N. State of the art and taxonomy of prognostics approaches, trends of prognostics applications and open issues towards maturity at different technology readiness levels. Mech. Syst. Signal Process. 2017, 94, 214–236. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S.; Kolake, S.M.; Song, T.; Yeo, T.; Doo, S. A novel multistage support vector machine based approach for Li-ion battery remaining useful life estimation. Appl. Energy 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Zhou, H.W.; Huang, J.Q.; Lu, F. Reduced kernel recursive least squares algorithm for aero-engine degradation prediction. Mech. Syst. Signal Process. 2017, 95, 446–467. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, B.; Lu, N.; Cocquempot, V. Accurate prediction of RUL under uncertainty conditions: Application to the traction system of a high-speed train. In Proceedings of the 10th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes, IFAC Safe Process 2018, Warsaw, Poland, 29–31 August 2018. [Google Scholar]
- Sauer, D.U.; Wenzl, H. Comparison of different approaches for lifetime prediction of electrochemical systems—Using lead-acid batteries as example. J. Power Sources 2008, 176, 534–546. [Google Scholar] [CrossRef]
- Remmlinger, J.; Buchholz, M.; Soczka-Guth, T.; Dietmayer, K. On-board state-of-health monitoring of lithium-ion batteries using linear parameter-varying models. J. Power Sources 2013, 239, 689–695. [Google Scholar] [CrossRef]
- Zheng, X.J.; Fang, H.J. An integrated unscented kalman filter and relevance vector regression approach for lithium-ion battery remaining useful life and short-term capacity prediction. Reliab. Eng. Syst. Saf. 2015, 144, 74–82. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Wei, J.W.; Dong, G.Z.; Chen, Z.H. Remaining useful life prediction and state of health diagnosis for Lithium-Ion batteries using particle filter and support vector regression. IEEE Trans. Ind. Electron. 2018, 65, 5634–5643. [Google Scholar] [CrossRef]
- Li, D.Z.; Wang, W.; Ismail, F. A mutated particle filter technique for system state estimation and battery life prediction. IEEE Trans. Instrum. Meas. 2014, 63, 2034–2043. [Google Scholar] [CrossRef]
- Miao, Q.; Xie, L.; Cui, H.; Liang, W.; Pecht, M. Remaining useful life prediction of lithium-ion battery with unscented particle filter technique. Microelectron. Reliab. 2013, 53, 805–810. [Google Scholar] [CrossRef]
- Liu, Z.; Sun, G.; Bu, S.; Han, J.; Tang, X.; Pecht, M. Particle learning framework for estimating the remaining useful life of Lithium-Ion batteries. IEEE Trans. Instrum. Meas. 2017, 66, 280–293. [Google Scholar] [CrossRef]
- Su, X.; Wang, S.; Pecht, M.; Zhao, L.; Ye, Z. Interacting multiple model particle filter for prognostics of lithium-ion batteries. Microelectron. Reliab. 2017, 70, 59–69. [Google Scholar] [CrossRef]
- Long, B.; Xian, W.; Jiang, L.; Liu, Z. An improved autoregressive model by particle swarm optimization for prognostics of lithium-ion batteries. Microelectron. Reliab. 2013, 53, 821–831. [Google Scholar] [CrossRef]
- Liu, J.; Saxena, A.; Goebel, K.; Saha, B.; Wang, W. An adaptive recurrent neural network for remaining useful life prediction of Lithium-ion batteries. In Proceedings of the Annual Conference of the Prognostics and Health Management Society 2010 (PHM 2010), Portland, OR, USA, 13–16 October 2010. [Google Scholar]
- Chaoui, H.; Ibe-Ekeocha, C.C.; Gualous, H. Aging prediction and state of charge estimation of a LiFePO4 battery using input time-delayed neural networks. Electr. Power Syst. Res. 2017, 146, 189–197. [Google Scholar] [CrossRef]
- Xia, B.; Cui, D.; Sun, Z.; Lao, Z.; Zhang, R.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. State of charge estimation of lithium-ion batteries using optimized Levenberg-Marquardt wavelet neural network. Energy 2018, 153, 694–705. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, J.; Pan, D.; Peng, Y.; Peng, X. Lithium-ion battery remaining useful life estimation with an optimized relevance vector machine algorithm with incremental learning. Measurement 2015, 63, 143–151. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, M.; Chen, Y.; Tao, Y. A novel health indicator for on-line lithium-ion batteries remaining useful life prediction. J. Power Sources 2016, 321, 1–10. [Google Scholar] [CrossRef]
- Ng, S.S.Y.; Xing, Y.; Tsui, K.L. A naive Bayes model for robust remaining useful life prediction of lithium-ion battery. Appl. Energy 2014, 118, 114–123. [Google Scholar] [CrossRef]
- Cheng, Y.; Lu, C.; Li, T.; Tao, L. Residual lifetime prediction for lithium-ion battery based on functional principal component analysis and Bayesian approach. Energy 2015, 90, 1983–1993. [Google Scholar] [CrossRef]
- Yang, D.; Zhang, X.; Pan, R.; Wang, Y.; Chen, Z. A novel Gaussian process regression model for state-of-health estimation of lithium-ion battery using charging curve. J. Power Sources 2018, 384, 387–395. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Battery Data Set, NASA Ames Prognostics Data Repository; NASA Ames: Moffett Field, CA, USA, 2007. Available online: https://ti.arc.nasa.gov/tech/dash/groups/pcoe/prognostic-data-repository/ (accessed on 5 March 2018).
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Rong, P.; Pedram, M. An analytical model for predicting the remaining battery capacity of Lithium-Ion batteries. IEEE Trans. Very Large Scale Integr. Syst. 2006, 14, 441–451. [Google Scholar] [CrossRef]
- Goebel, K.; Saha, B.; Saxena, A.; Celaya, J.R. Prognostics in battery health management. IEEE Instrum. Meas. Mag. 2008, 11, 33–40. [Google Scholar] [CrossRef]
- Tang, X.; Zou, C.; Yao, K.; Chen, G.; Liu, B.; He, Z.; Gao, F. A fast estimation algorithm for lithium-ion battery state of health. J. Power Sources 2018, 396, 453–458. [Google Scholar] [CrossRef]
- Liu, D.; Wang, H.; Peng, Y.; Xie, W.; Liao, H. Satellite Lithium-Ion battery remaining cycle life prediction with novel indirect health indicator extraction. Energies 2013, 6, 3654–3668. [Google Scholar] [CrossRef]
- Gautheir, T.D. Detecting trends using spearman’s rank correlation coefficient. Environ. Forensics 2001, 2, 359–362. [Google Scholar] [CrossRef]
- Elaheh, A.; Mehmed, K. SOM-based partial labeling of imbalanced data stream. Neurocomputing 2017, 262, 120–133. [Google Scholar]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to forget: Continual prediction with LSTM. In Proceedings of the 9th International Conference on Artificial Neural Networks, (ICANN’99), Edinburgh, UK, 7–10 September 1999; pp. 850–855. [Google Scholar]
- Riedmiller, M.; Braun, H. A direct adaptive method for faster backpropagation learning: The RPROP algorithm. Chem. Prod. Process Model. 1993, 6, 586–591. [Google Scholar]
- Kingma, D.; Ba, J.L. Adam: A method for stochastic optimization. arXiv, 2014; arXiv:1412.6980. [Google Scholar]
- Tikhonov, A.N. On the stability of inverse problems. Dolklady Akademii Nauk SSSR 1943, 39, 195–198. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery No. | Constant Charge Current/A | Charge Cut-off Voltage/V | Discharge Current/A | Discharge Cut-off Voltage/V | Nominal Capacity/Ah |
|---|---|---|---|---|---|
| 5 | 1.5 | 4.2 | 2.0 | 2.7 | 2.0 |
| 6 | 1.5 | 4.2 | 2.0 | 2.5 | 2.0 |
| 7 | 1.5 | 4.2 | 2.0 | 2.2 | 2.0 |
| 18 | 1.5 | 4.2 | 2.0 | 2.5 | 2.0 |
| Methods | RMSE | MAE | RULerror |
|---|---|---|---|
| DLSTM | 0.0119 | 0.0087 | 2 |
| LSTM | 0.0413 | 0.0348 | 20 |
| ANN | 0.0334 | 0.0303 | −4 |
| ARMA | 0.0356 | 0.0302 | −5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Lu, N.; Wang, S.; Cheng, Y.; Jiang, B. Dynamic Long Short-Term Memory Neural-Network- Based Indirect Remaining-Useful-Life Prognosis for Satellite Lithium-Ion Battery. Appl. Sci. 2018, 8, 2078. https://doi.org/10.3390/app8112078
Wang C, Lu N, Wang S, Cheng Y, Jiang B. Dynamic Long Short-Term Memory Neural-Network- Based Indirect Remaining-Useful-Life Prognosis for Satellite Lithium-Ion Battery. Applied Sciences. 2018; 8(11):2078. https://doi.org/10.3390/app8112078
Chicago/Turabian StyleWang, Cunsong, Ningyun Lu, Senlin Wang, Yuehua Cheng, and Bin Jiang. 2018. "Dynamic Long Short-Term Memory Neural-Network- Based Indirect Remaining-Useful-Life Prognosis for Satellite Lithium-Ion Battery" Applied Sciences 8, no. 11: 2078. https://doi.org/10.3390/app8112078
APA StyleWang, C., Lu, N., Wang, S., Cheng, Y., & Jiang, B. (2018). Dynamic Long Short-Term Memory Neural-Network- Based Indirect Remaining-Useful-Life Prognosis for Satellite Lithium-Ion Battery. Applied Sciences, 8(11), 2078. https://doi.org/10.3390/app8112078