Detectability of Delamination in Concrete Structure Using Active Infrared Thermography in Terms of Signal-to-Noise Ratio

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Related Works
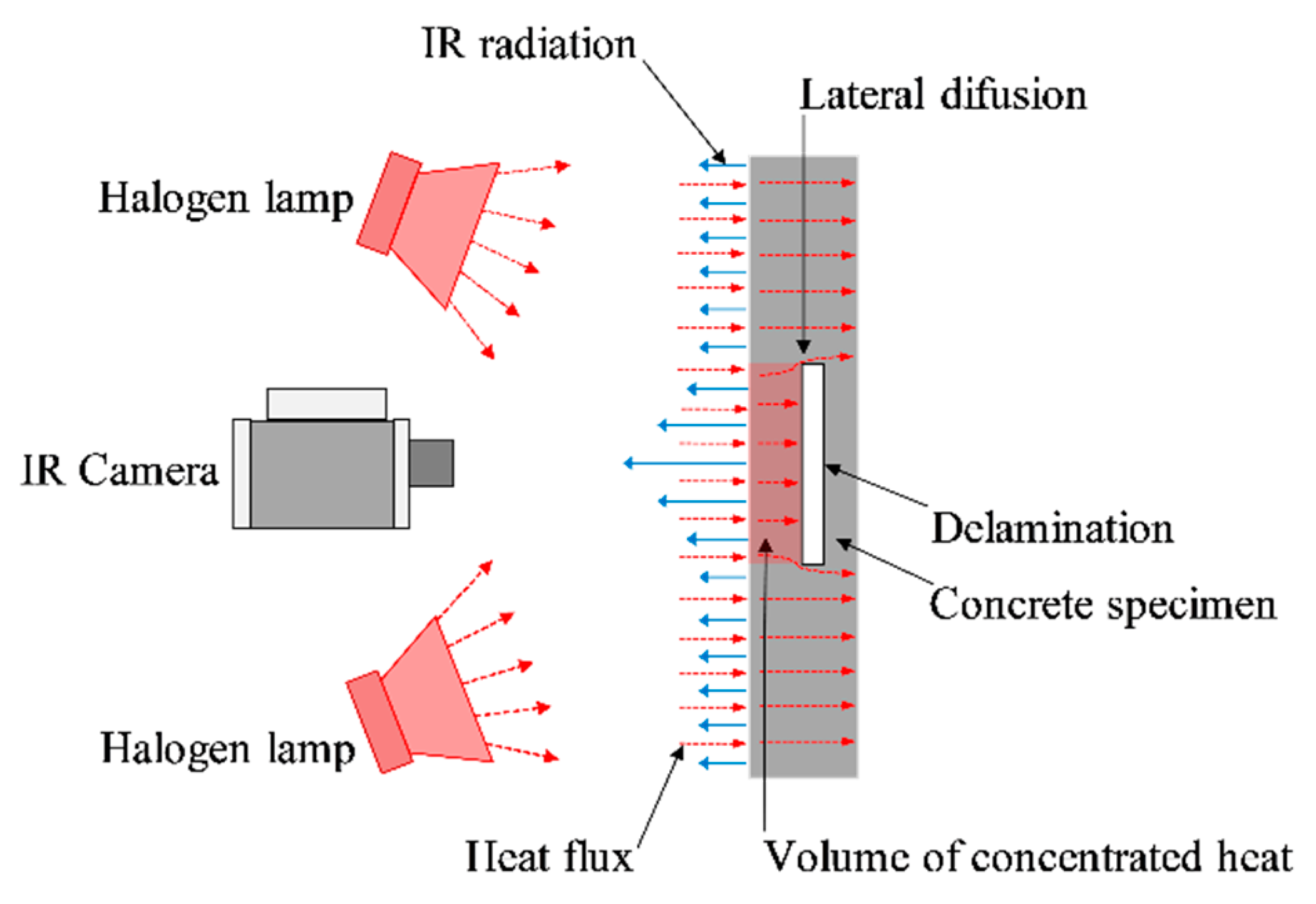
3. Fundamental of Infrared Thermography
4. Experimental Design and Procedure
4.1. Preparation of the Test Specimen
4.2. Testing Process
5. Analysis of Experimental Results
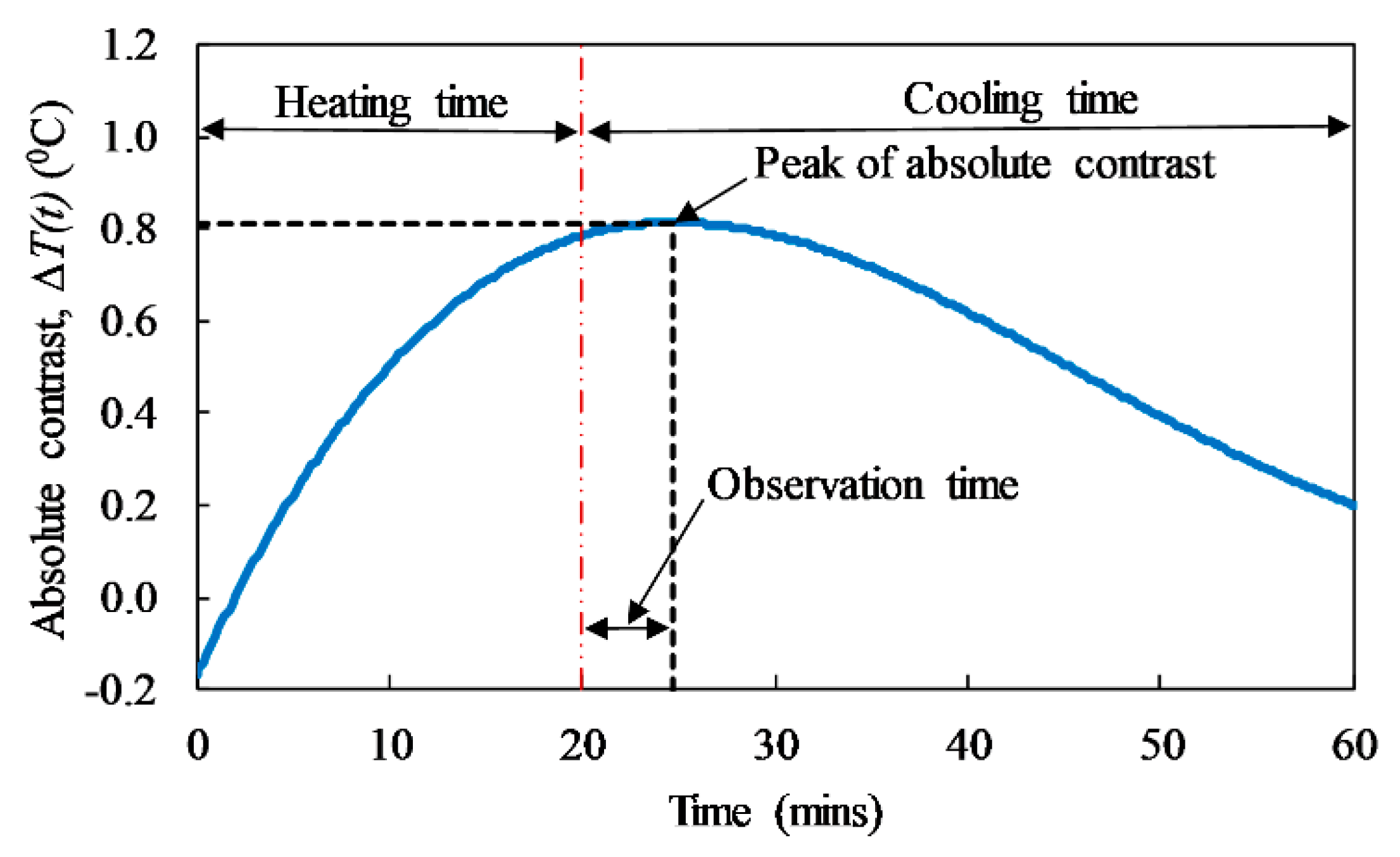
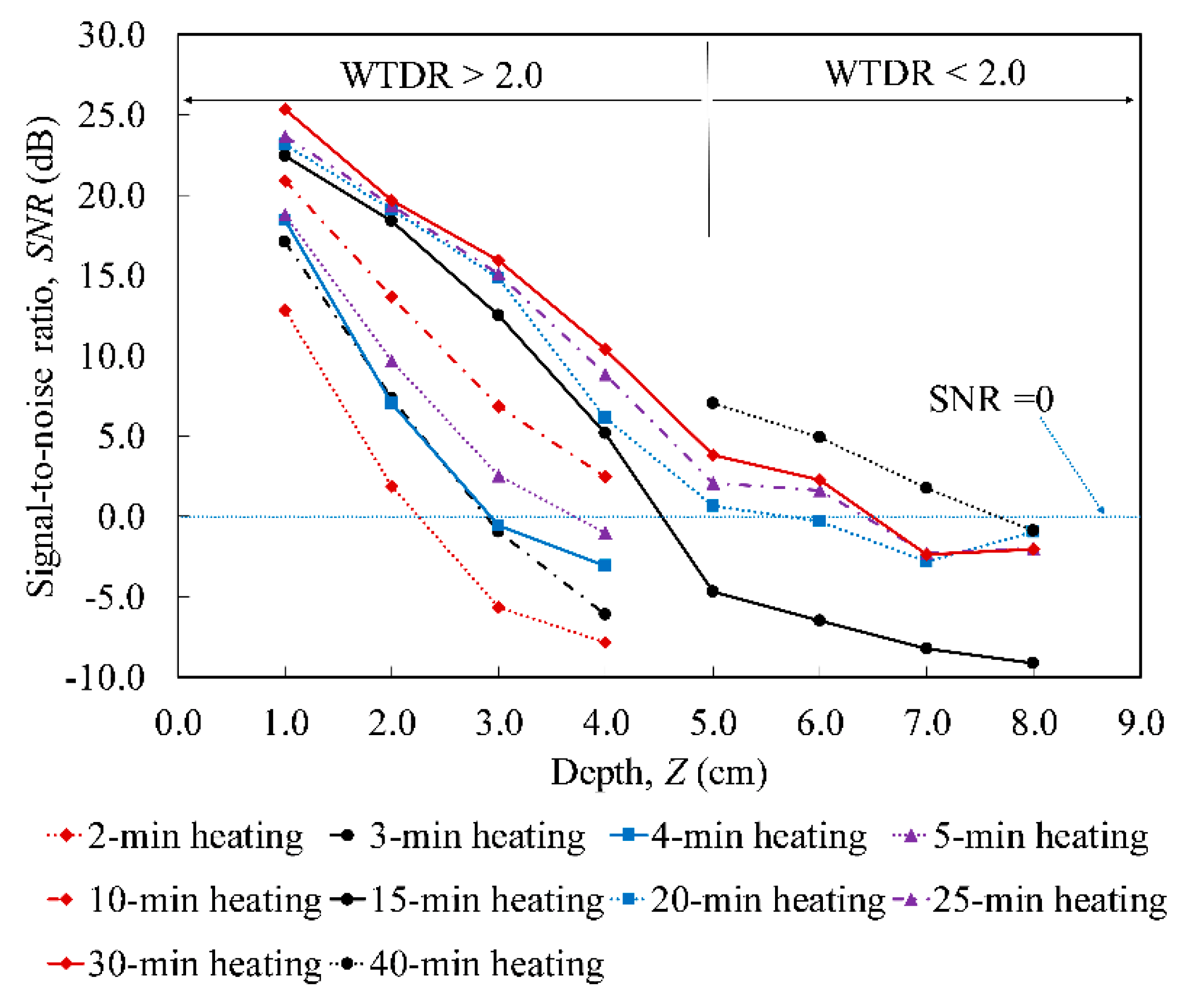
5.1. Signal-to-Noise Ratio (SNR) Criterion and Absolute Contrast Method
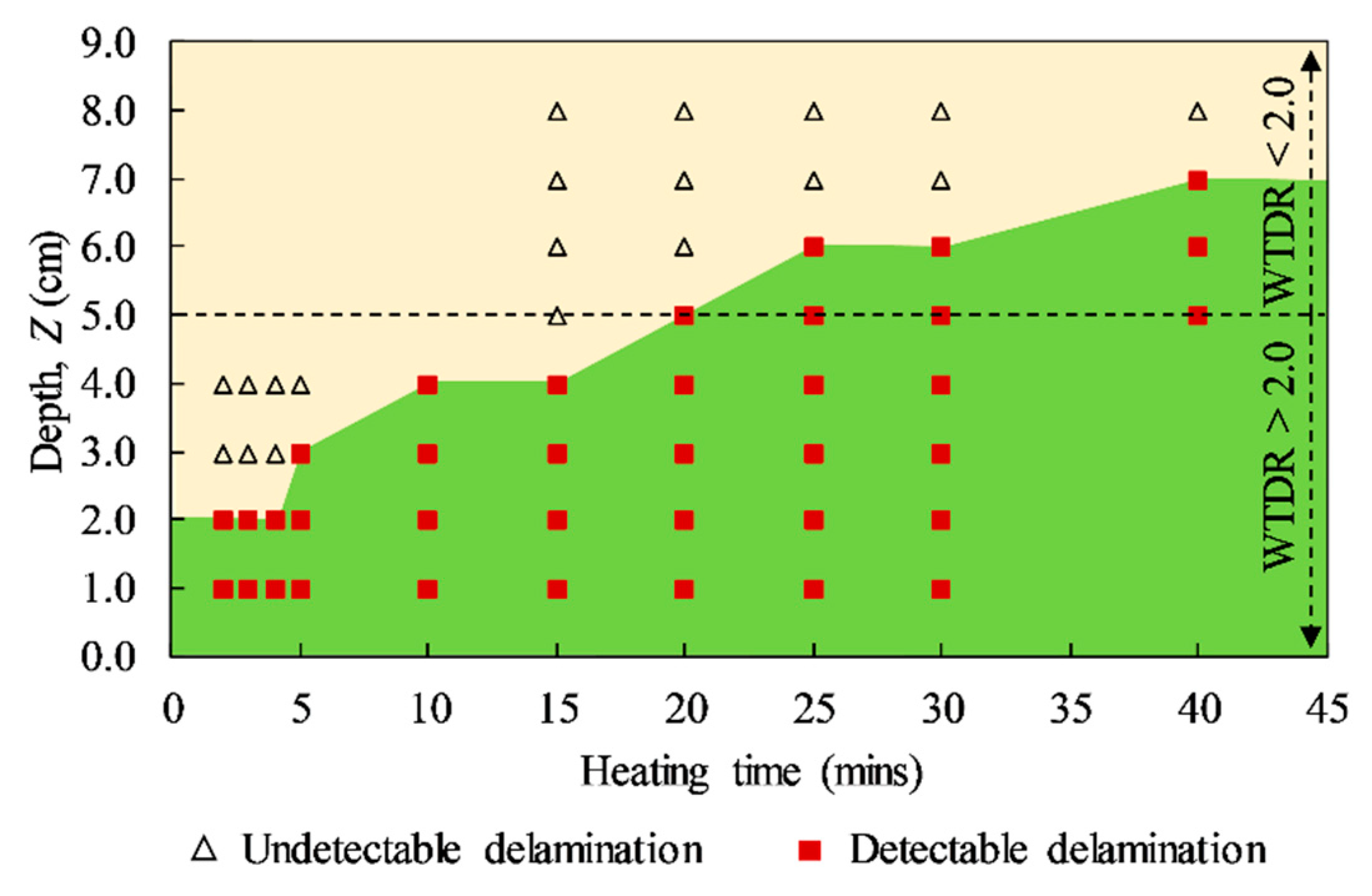
5.2. Detectability of Delaminations Using SNR
5.3. Effects of Depth on the Detectability of Delaminations
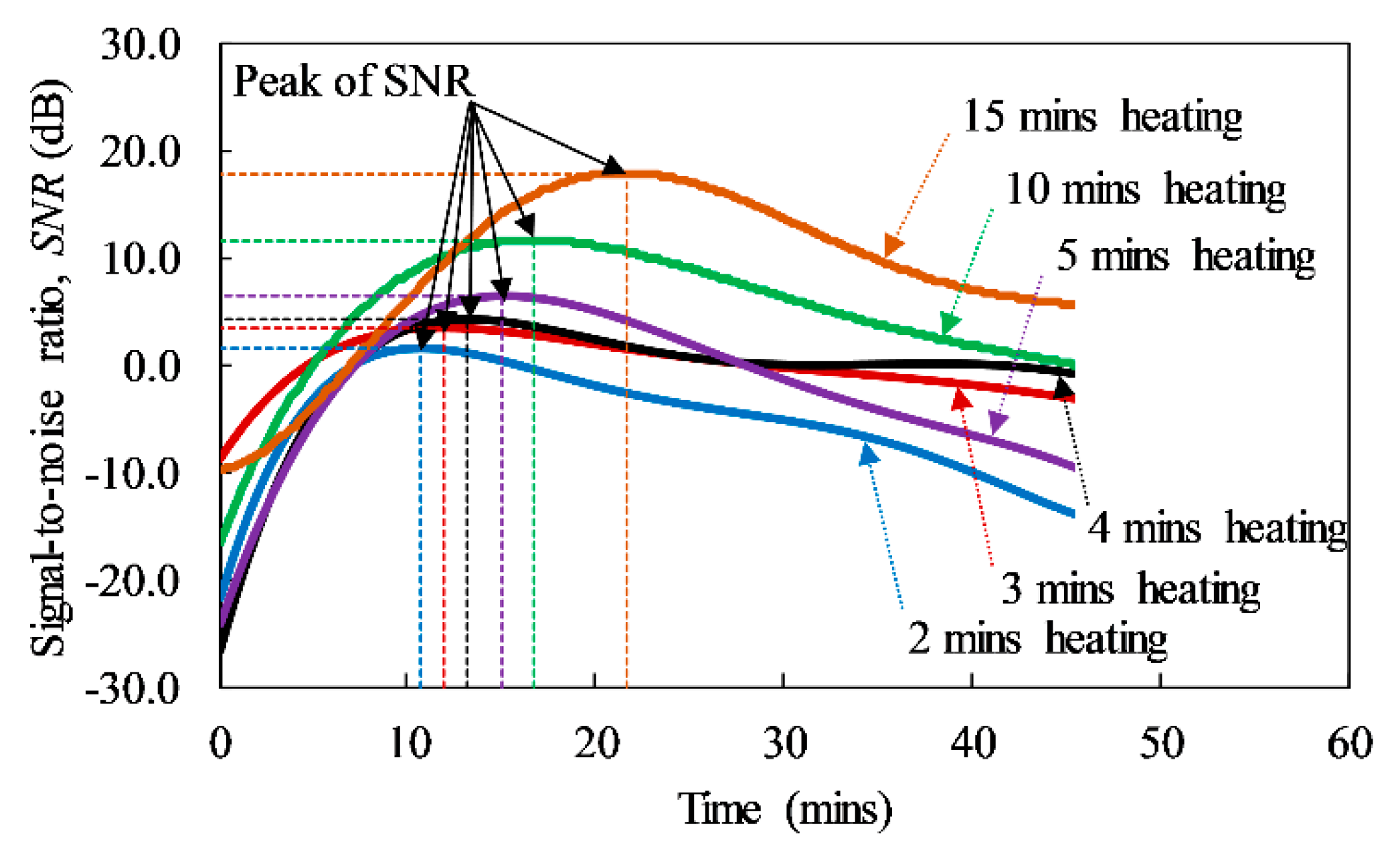
5.4. Effects of Heating Regime on the Detectability of Delaminations
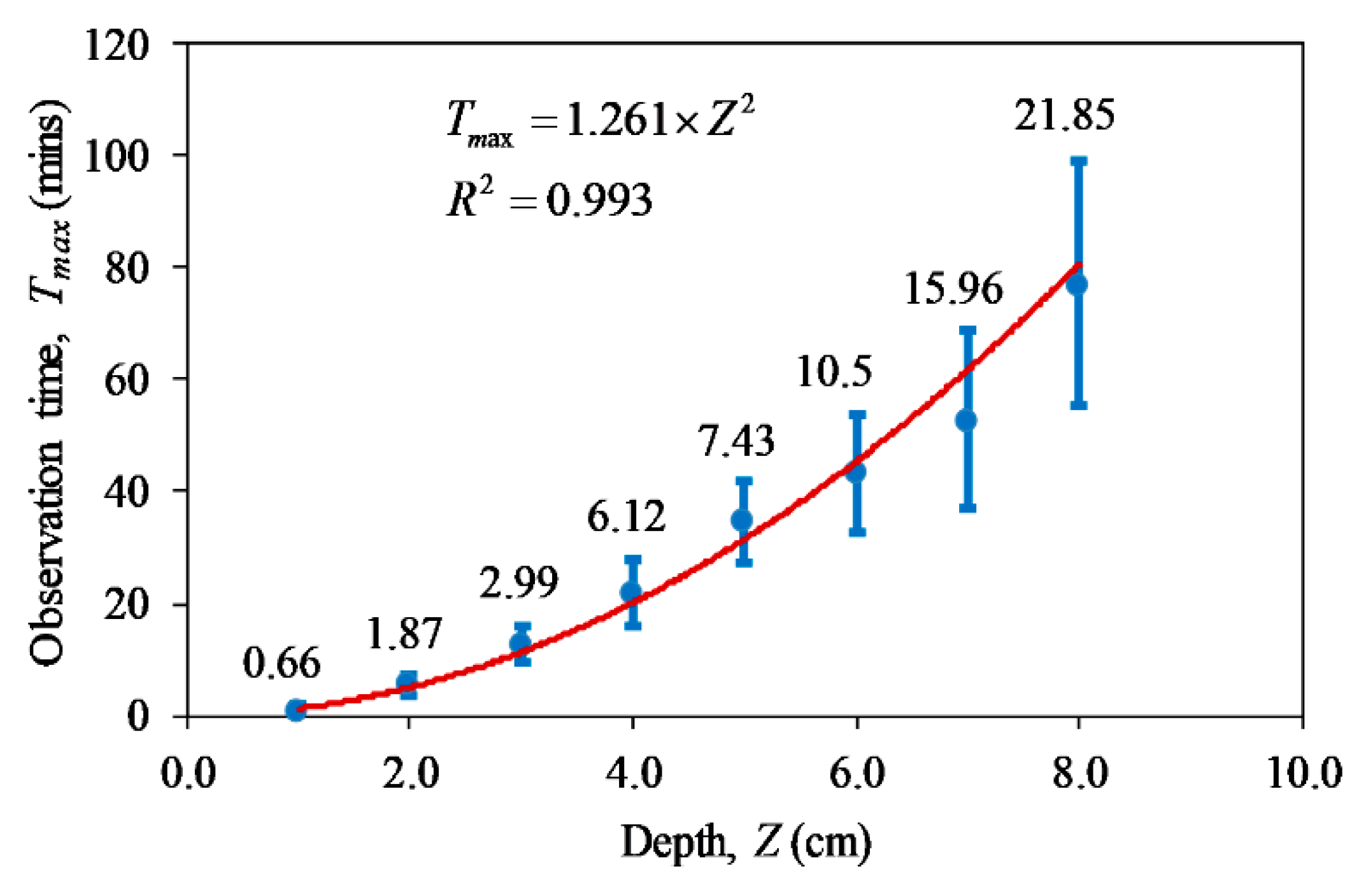
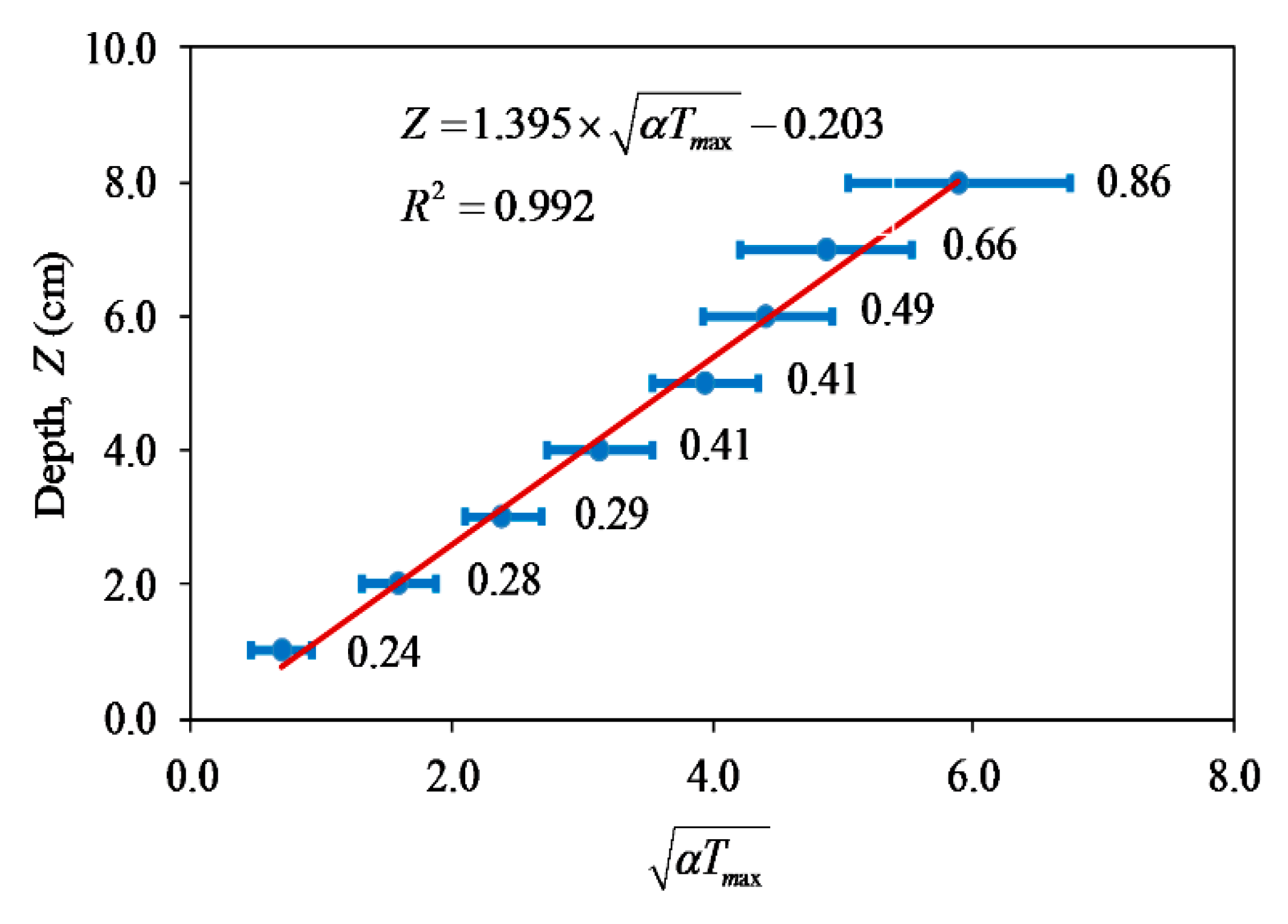
5.5. Estimation of the Nondimensional Prefactor for Depth Evaluation
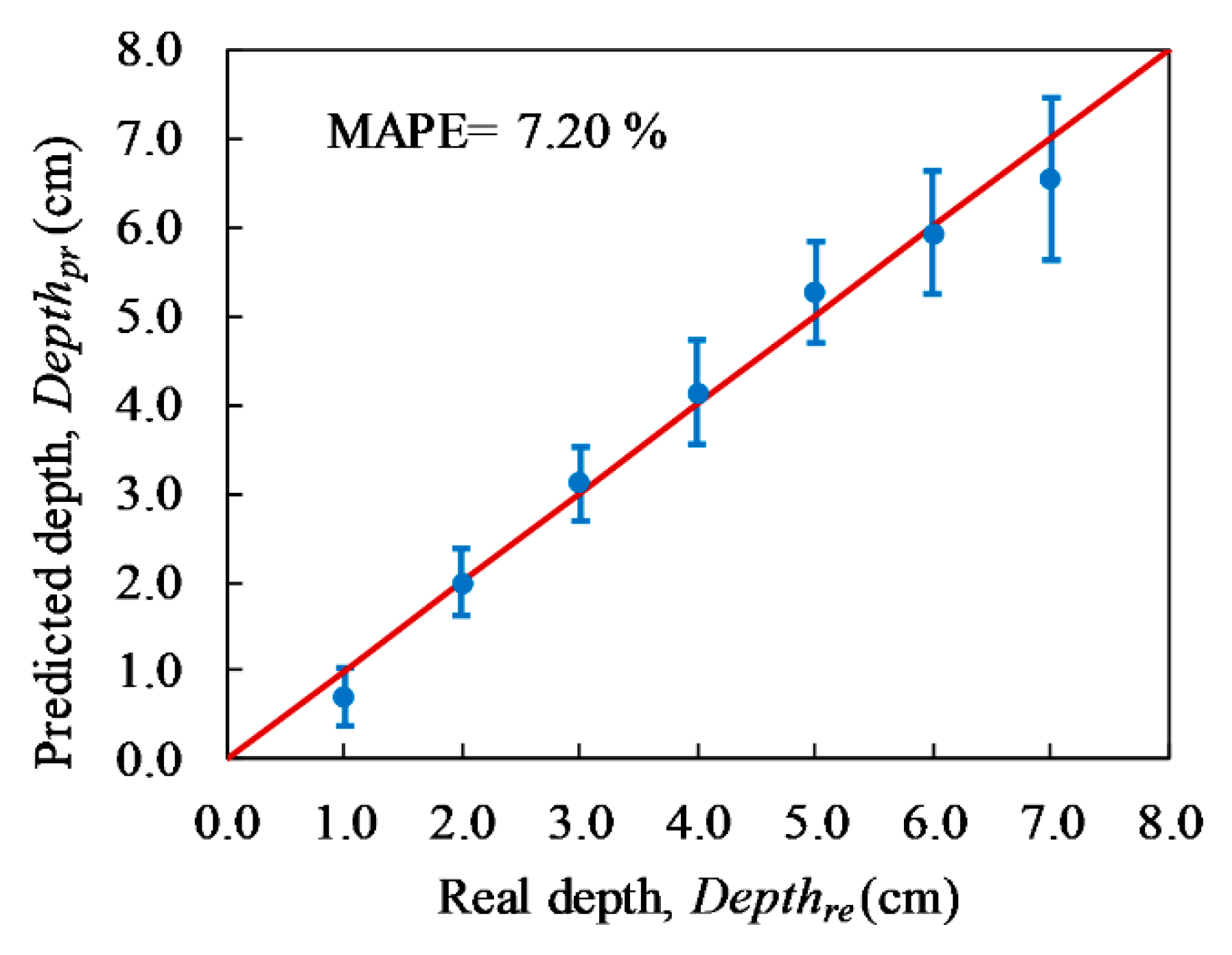
5.6. Prediction of the Depth of Delaminations
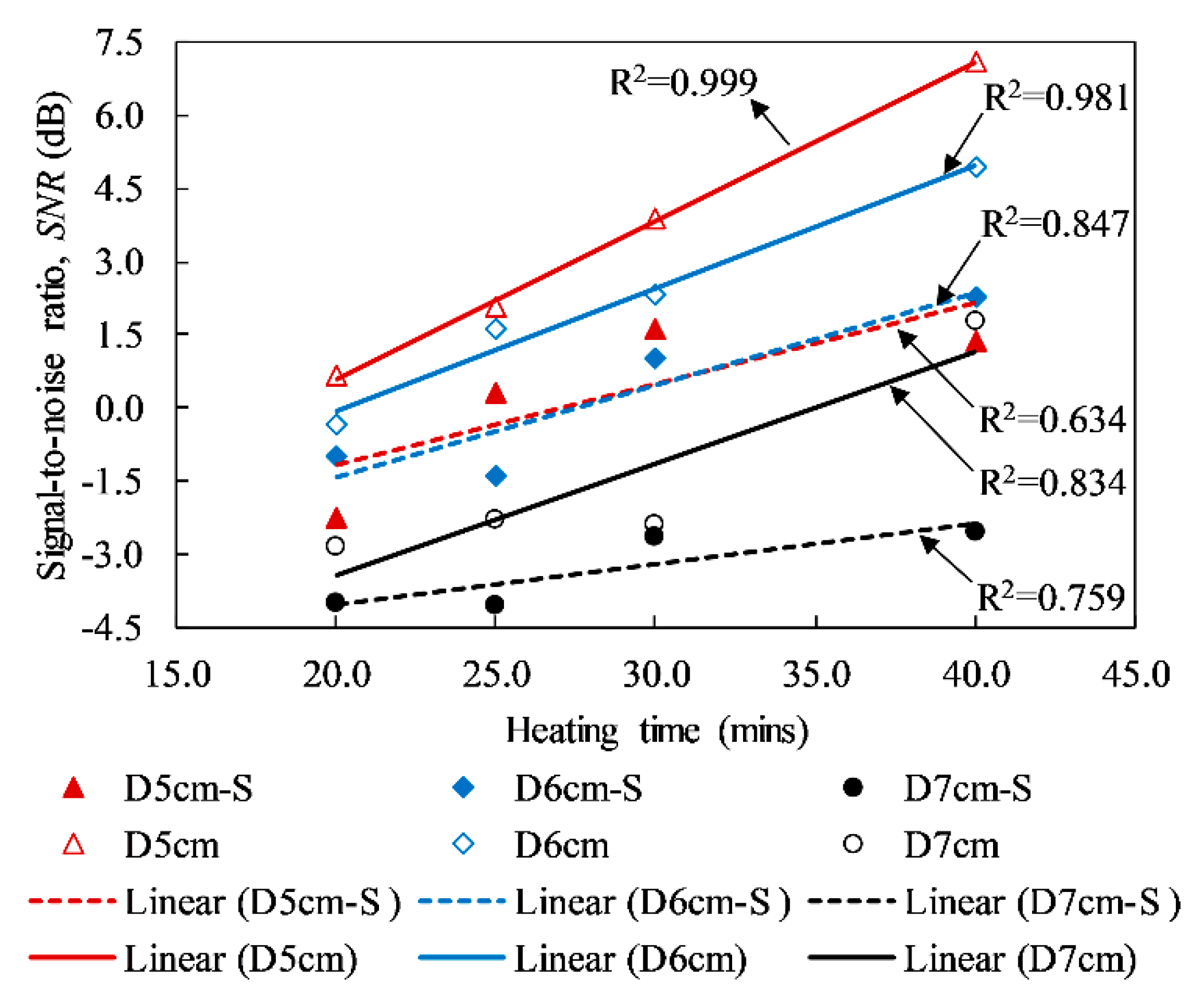
5.7. Effects of Steel Bars on the Detectability of Delaminations
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abdel-Qader, I.; Yohali, S.; Abudayyeh, O.; Yehia, S. Segmentation of thermal images for non-destructive evaluation of bridge decks. NDT E Int. 2008, 41, 395–405. [Google Scholar] [CrossRef]
- Milovanović, B.; Banjad Pečur, I. Detecting Defects in Reinforced Concrete using the Method of Infrared Thermography. CrSNDT J. 2013, 3, 3–13. [Google Scholar]
- Ahlborn, T.M.; Brooks, C.N. Evaluation of Bridge Decks Using Non-Destructive Evaluation (NDE) at Near Highway Speeds for Effective Asset Management; RC-1617; Michigan Technological University: Houghton, MI, USA, 30 June 2015. [Google Scholar]
- Portland Cement Association. Types and Causes of Concrete Deterioration; Portland Cement Association: Skokie, IL, USA, 2002. [Google Scholar]
- Tran, Q.H.; Huh, J.; Mac, V.H.; Kang, C.; Han, D. Effects of rebars on the detectability of subsurface defects in concrete bridges using square pulse thermography. NDT E Int. 2018. [Google Scholar] [CrossRef]
- Vaghefi, K. Infrared Thermography Enhancements for Concrete Bridge Evaluation. Ph.D. Thesis, Michigan Technological Univesity, Houghton, MI, USA, 2013. [Google Scholar]
- Hiasa, S.; Birgul, R.; Watase, A.; Matsumoto, M.; Mitani, K.; Catbas, F.N. A Review of Field Implementation of Infrared Thermography as a Non-destructive Evaluation Technology Shuhei. In Proceedings of the Sixth Annual International Conference on Computing in Civil and Building Engineering, Orlando, FL, USA, 17 June 2014; pp. 455–462. [Google Scholar]
- Milovanović, B.; Banjad Pečur, I. Review of Active IR Thermography for Detection and Characterization of Defects in Reinforced Concrete. J. Imaging 2016, 2, 11. [Google Scholar] [CrossRef]
- American Association of State Highway Transportation Officials. AASHTO LRFD Bridge Design Specifications; American Association of State Highway Transportation Officials: Washington, DC, USA, 2014. [Google Scholar]
- American Concrete Institute. Building Code Requirements for Structural Concrete (ACI 318M-14); American Concrete Institute: Farmington Hills, MI, USA, 2014. [Google Scholar]
- Tran, Q.H.; Huh, J.; Kang, C.; Lee, B.Y.; Kim, I.T.; Ahn, J.H. Detectability of Subsurface Defects with Different Width-to-Depth Ratios in Concrete Structures Using Pulsed Thermography. J. Nondestruct. Eval. 2018, 37, 32. [Google Scholar] [CrossRef]
- Huh, J.; Tran, Q.H.; Lee, J.-H.; Han, D.; Ahn, J.-H.; Yim, S. Experimental Study on Detection of Deterioration in Concrete Using Infrared Thermography Technique. Adv. Mater. Sci. Eng. 2016, 2016, 1053856. [Google Scholar] [CrossRef]
- Wysocka-Fotek, O.; Oliferuk, W.; Maj, M. Reconstruction of size and depth of simulated defects in austenitic steel plate using pulsed infrared thermography. Infrared Phys. Technol. 2012, 55, 363–367. [Google Scholar] [CrossRef]
- Maierhofer, C.; Arndt, R.; Röllig, M.; Rieck, C.; Walther, A.; Scheel, H.; Hillemeier, B. Application of impulse-thermography for non-destructive assessment of concrete structures. Cem. Concr. Compos. 2006, 28, 393–401. [Google Scholar] [CrossRef]
- Vavilov, V.; Taylor, R. Theoretical and Practical Aspects of the Thermal Nondestructive Testing of Bonded Structures. In Research Techniques in NDT; Sharpe, R.S., Ed.; Academic Press: London, UK, 1982; Volume 5, pp. 238–279. [Google Scholar]
- Maldague, X.P.V. Nondestructive Evaluation of Materials by Infrared Thermography; Springer: London, UK, 1993; ISBN 9781447119975. [Google Scholar]
- Maierhofer, C.; Arndt, R.; Röllig, M. Influence of concrete properties on the detection of voids with impulse-thermography. Infrared Phys. Technol. 2007, 49, 213–217. [Google Scholar] [CrossRef]
- Cotič, P.; Kolarič, D.; Bosiljkov, V.B.; Bosiljkov, V.; Jagličić, Z. Determination of the applicability and limits of void and delamination detection in concrete structures using infrared thermography. NDT E Int. 2015, 74, 87–93. [Google Scholar] [CrossRef]
- Cheng, C.C.; Cheng, T.M.; Chiang, C.H. Defect detection of concrete structures using both infrared thermography and elastic waves. Autom. Constr. 2008, 18, 87–92. [Google Scholar] [CrossRef]
- Hidalgo-Gato, R.; Andrés, J.R.; Lopez-Higuera, J.M.; Madruga, F.J. Quantification by Signal to Noise Ratio of Active Infrared Thermography Data Processing Techniques. Opt. Photonics J. 2013, 3, 20–26. [Google Scholar] [CrossRef]
- Larsen, C.A. Document Flash Thermography. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2011. [Google Scholar]
- Svantner, M.; Muzika, L.; Chmelík, T.; Skala, J.; Švantner, M.; Muzika, L.; Chmelík, T.; Skála, J. Quantitative evaluation of active thermography using contrast-to-noise ratio. Appl. Opt. 2018, 57, D49–D55. [Google Scholar] [CrossRef] [PubMed]
- Almond, D.P.; Pickering, S.G. An analytical study of the pulsed thermography defect detection limit. J. Appl. Phys. 2012, 111, 093510. [Google Scholar] [CrossRef]
- Weritz, F.; Arndt, R.; Röllig, M.; Maierhofer, C.; Wiggenhauser, H. Investigation of concrete structures with pulse phase thermography. Mater. Struct. 2005, 38, 843–849. [Google Scholar] [CrossRef]
- Maldague, X.; Marinetti, S. Pulse phase infrared thermography. J. Appl. Phys. 1996, 79, 2694–2698. [Google Scholar] [CrossRef]
- Maierhofer, C.; Brink, A.; Röllig, M.; Wiggenhauser, H. Transient thermography for structural investigation of concrete and composites in the near surface region. Infrared Phys. Technol. 2002, 43, 271–278. [Google Scholar] [CrossRef]
- Madruga, F.J.; Albendea, P.; Ibarra-Castanedo, C.; López-Higuera, J.M. Signal to Noise Ratio (SNR) Comparison for Lock-in Thermographic Data Processing Methods in CFRP Specimen. In Proceedings of the 10th International Conference on Quantitative Infrared Thermography, Québec, QC, Canada, 27–30 July 2010. [Google Scholar]
- Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; López, I. Non-destructive inspection of drilled holes in reinforced honeycomb sandwich panels using active thermography. Infrared Phys. Technol. 2012, 55, 491–498. [Google Scholar] [CrossRef]
- Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; López, I. A quantitative comparison of stimulation and post-processing thermographic inspection methods applied to aeronautical carbon fibre reinforced polymer. Quant. Infrared Thermogr. J. 2013, 10, 55–73. [Google Scholar] [CrossRef]
- FLIR System Inc. The Ultimate Infrared Handbook for R & D Professionals; FLIR System Inc.: Hong Kong, China, 2012. [Google Scholar]
- Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; Molleda, J.; Bulnes, F. Infrared Thermography for Temperature Measurement and Non-Destructive Testing. Sensors 2014, 14, 12305–12348. [Google Scholar] [CrossRef] [PubMed]
- Vollmer, M.; Möllmann, K.-P. Infrared Thermal Imaging: Fundamentals, Research and Applications; WILEY-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2010; ISBN 978-3-527-40717-0. [Google Scholar]
- MICRO-EPSILON. Basics of Non Contact Temperature Measurement; MICRO-EPSILON: Raleigh, NC, USA, 2018. [Google Scholar]
- Nielsen-Kellerman. Instruction Manual of Kestrel 3000 ™ ®; Nielsen-Kellerman: Chester, PA, USA, 1999. [Google Scholar]
- FLIR System Inc. FLIR SC660 Catalog: Technical Data of FLIR SC660 Infrared Camera; FLIR System Inc.: Hong Kong, China, 2014. [Google Scholar]
- Albendea, P.; Madruga, F.J.; Cobo, A.; López-Higuera, J.M. Signal to Noise Ratio (SNR) Comparison for Pulsed Thermographic Data Processing Methods Applied to Welding Defect Detection. In Proceedings of the 10th International Conference on Quantitative Infrared Thermography, Québec, QC, Canada, 27–30 July 2010. [Google Scholar]
- Brown, J.R.; Hamilton, H.R. Heating Methods and Detection Limits for Infrared Thermography Inspection of Fiber-Reinforced Polymer Composites. ACI Mater. J. 2007, 104, 481–490. [Google Scholar]
- Tran, Q.H.; Han, D.; Kang, C.; Haldar, A.; Huh, J. Effects of Ambient Temperature and Relative Humidity on Subsurface Defect Detection in Concrete Structures by Active Thermal Imaging. Sensors 2017, 17, 1718. [Google Scholar] [CrossRef] [PubMed]
- Kretzmann, J.E. Evaluating the Industrial Application of Non-Destructive Inspection of Composites Using Transient Thermography. Ph.D. Thesis, University of Stellenbosch, Stellenbosch, South Africa, 2016. [Google Scholar]
- Maldague, X.P.V. Applications of Infrared Thermography in Nondestructive Evaluation; Elsevier: Lausanne, Switzerland, 2000; pp. 591–609. ISBN 978-0080430201. [Google Scholar]
- Maldague, X.P. Theory and Practice of Infrared Technology for Nondestructive Testing; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Lewis, C.D. Demand Forecasting and Inventory Control: A Computer Aided Learning Approach; Woodhead Publishing Ltd.: Cambridge, UK, 1997; ISBN 9781855732414. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Delamination | Size (cm × cm × cm) | Depth (cm) | Width-to-Depth Ratio (WTDR) | Location in Comparison with Steel Bars | Testing Face |
|---|---|---|---|---|---|
| BD1 | 10 × 10 × 1 | 4.0 | 2.50 | Above | Back |
| BD2 | 10 × 10 × 1 | 3.0 | 3.30 | Above | Back |
| BD3 | 10 × 10 × 1 | 2.0 | 5.00 | Above | Back |
| BD4 | 10 × 10 × 1 | 1.0 | 10.0 | Above | Back |
| BD5 | 10 × 10 × 1 | 4.0 | 2.50 | Above | Back |
| BD6 | 10 × 10 × 1 | 3.0 | 3.30 | Above | Back |
| BD7 | 10 × 10 × 1 | 2.0 | 5.00 | Above | Back |
| BD8 | 10 × 10 × 1 | 1.0 | 10.0 | Above | Back |
| FD1 | 10 × 10 × 1 | 5.0 | 2.00 | Above | Front |
| FD2 | 10 × 10 × 1 | 6.0 | 1.67 | Above | Front |
| FD3 | 10 × 10 × 1 | 7.0 | 1.43 | Above | Front |
| FD4 | 10 × 10 × 1 | 8.0 | 1.25 | Above | Front |
| FD5 | 10 × 10 × 1 | 5.0 | 2.00 | Below | Front |
| FD6 | 10 × 10 × 1 | 6.0 | 1.67 | Below | Front |
| FD7 | 10 × 10 × 1 | 7.0 | 1.43 | Below | Front |
| FD8 | 10 × 10 × 1 | 8.0 | 1.25 | Below | Front |
| Heating Time (min) | Test Case | Back Face (Depth from 1 to 4 cm) | Front Face (Depth from 5 to 8 cm) | ||
|---|---|---|---|---|---|
| Ambient Temperature (°C) | Relative Humidity (%) | Ambient Temperature (°C) | Relative Humidity (%) | ||
| 2 | Case 1 | 19.9 | 63 | - | - |
| 3 | Case 1 | 18.4 | 59 | - | - |
| Case 2 | 20.8 | 91 | - | - | |
| Case 3 | 19.7 | 64 | - | - | |
| 4 | Case 1 | 20.6 | 94 | - | - |
| Case 2 | 21.2 | 86 | - | - | |
| Case 3 | 17.7 | 62 | - | - | |
| 5 | Case 1 | 20.1 | 77 | - | - |
| Case 2 | 18.2 | 55 | - | - | |
| Case 3 | 17.9 | 84 | - | - | |
| 10 | Case 1 | 18.9 | 69 | - | - |
| Case 2 | 16.9 | 56 | - | - | |
| Case 3 | 21.4 | 73 | - | - | |
| 15 | Case 1 | 24.2 | 85 | 10.2 | 59 |
| Case 2 | 24.8 | 61 | - | - | |
| Case 3 | 17.1 | 66 | - | - | |
| 20 | Case 1 | 24.4 | 85 | 14.6 | 73 |
| Case 2 | 19.2 | 57 | 17.1 | 53 | |
| Case 3 | 18.0 | 76 | 15.8 | 74 | |
| 25 | Case 1 | 24.5 | 86 | 12.9 | 35 |
| Case 2 | 24.5 | 58 | 14.2 | 78 | |
| Case 3 | 21.2 | 73 | 16.1 | 63 | |
| 30 | Case 1 | 24.3 | 79 | 12.1 | 48 |
| Case 2 | 25.2 | 53 | 13.7 | 83 | |
| Case 3 | 17.7 | 84 | 16.8 | 62 | |
| 40 | Case 1 | - | - | 15.9 | 52 |
| Case 2 | - | - | 15.4 | 77 | |
| Items | Parameters |
|---|---|
| IR resolution | (640 × 480) pixels |
| Field of view (FOV) | (24° × 18°)/0.3 m |
| Thermal sensitivity/NETD | <30 mK @ + 30 °C |
| Spatial resolution (IFOV) | 0.65 mrad |
| Wavelength | (7.5–13) µm |
| Focal Plane Array (FRA) sensor | Uncooled microbolometer |
| Temperature range | (−40–+120) °C |
| Accuracy | ±1 °C or ±1% of reading |
| Heating Time (min) | BD4 (Depth 1 cm) | BD3 (Depth 2 cm) | BD2 (Depth 3 cm) | BD1 (Depth 4 cm) | FD1 (Depth 5 cm) | FD2 (Depth 6 cm) | FD3 (Depth 7 cm) | FD4 (Depth 8 cm) |
|---|---|---|---|---|---|---|---|---|
| SNR (dB) | SNR (dB) | SNR (dB) | SNR (dB) | SNR (dB) | SNR (dB) | SNR (dB) | SNR (dB) | |
| 2 | 12.88 | 1.90 | −5.62 | −7.81 | - | - | - | - |
| 3 | 17.12 | 7.35 | −0.93 | −6.11 | - | - | - | - |
| 4 | 18.48 | 7.05 | −0.52 | −3.06 | - | - | - | - |
| 5 | 18.81 | 9.72 | 2.57 | −0.98 | - | - | - | - |
| 10 | 20.88 | 13.67 | 6.89 | 2.47 | - | - | - | - |
| 15 | 22.42 | 18.38 | 12.53 | 5.18 | −4.65 | −6.51 | −8.19 | −9.11 |
| 20 | 23.18 | 19.09 | 14.85 | 6.15 | 0.67 | −0.32 | −2.82 | −0.92 |
| 25 | 23.67 | 19.38 | 15.09 | 8.87 | 2.10 | 1.62 | −2.30 | −1.97 |
| 30 | 25.34 | 19.69 | 15.92 | 10.41 | 3.86 | 2.31 | −2.38 | −2.06 |
| 40 | - | - | - | - | 7.08 | 4.94 | 1.78 | −0.87 |
| MAPE | The Accuracy of Forecasted Data |
|---|---|
| <10% | very good |
| <20% | good |
| <30% | reasonable |
| >30% | inaccurate |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huh, J.; Mac, V.H.; Tran, Q.H.; Lee, K.-Y.; Lee, J.-I.; Kang, C. Detectability of Delamination in Concrete Structure Using Active Infrared Thermography in Terms of Signal-to-Noise Ratio. Appl. Sci. 2018, 8, 1986. https://doi.org/10.3390/app8101986
Huh J, Mac VH, Tran QH, Lee K-Y, Lee J-I, Kang C. Detectability of Delamination in Concrete Structure Using Active Infrared Thermography in Terms of Signal-to-Noise Ratio. Applied Sciences. 2018; 8(10):1986. https://doi.org/10.3390/app8101986
Chicago/Turabian StyleHuh, Jungwon, Van Ha Mac, Quang Huy Tran, Ki-Yeol Lee, Jong-In Lee, and Choonghyun Kang. 2018. "Detectability of Delamination in Concrete Structure Using Active Infrared Thermography in Terms of Signal-to-Noise Ratio" Applied Sciences 8, no. 10: 1986. https://doi.org/10.3390/app8101986
APA StyleHuh, J., Mac, V. H., Tran, Q. H., Lee, K.-Y., Lee, J.-I., & Kang, C. (2018). Detectability of Delamination in Concrete Structure Using Active Infrared Thermography in Terms of Signal-to-Noise Ratio. Applied Sciences, 8(10), 1986. https://doi.org/10.3390/app8101986