1. Introduction
As an important supporting element, rolling bearings are widely used in various rotating machinery systems, such as wind turbines, aero engines and internal combustion engines. A minor bearing fault may affect the operation of the whole rotating machinery. Moreover, bearing faults can cause huge economic losses or even casualties [
1,
2,
3]. With the rapid emerging and popularization of the Internet and the Internet of things, big data have brought revolutionary challenges and disruptive innovation to traditional information technology. Fault diagnosis has also entered the era of “big data” and fault recognition is an important part of it.
The factors that cause bearing failure are numerous. The main causes of bearing failure include manufacturing and assembly faults which lead to vibrations dominated by out-of-balance shaft response and cage related frequencies [
4]. Other modes of failure of bearings are initiated by contact conditions. Some are due to loss of the preload or interference fitting, which are known as the variable compliance effect [
5]. Another major mode of failure in bearings is lubrication issues, lack of which can lead to wear, excessive friction and heat generation and scuffing. Finally, the worn rolling and sliding surfaces cause vibration, by which time any solution to the problem would be too late [
6,
7,
8,
9].
Fault feature extraction and fault classification are two important aspects of bearing fault diagnosis. Using an effective fault feature extraction method to establish the fault feature vectors that fully reflect the fault information and selecting an advanced classifier to train and recognize the feature vectors are important to ensure the high precision of fault diagnosis. Many researches have been carried out on fault feature extraction of bearings. Wavelet packet decomposition was used to eliminate the noise of the signal and the fault features were extracted by ensemble empirical mode decomposition (EEMD) in Reference [
10]. Successive wavelet decomposition techniques have also been used to focus on particular band of frequencies by obtaining the run-out wave attributed to particular features caused by the indicated sources, such as cage slipping, out-of-balance rotor rotation, etc. [
11]. Gao et al. [
12] combined the time frequency distribution and the non-negative matrix factorization to enhance the bearing fault characterization. Jiang et al. [
13] used the singular value and ratios of neighboring singular values to extract the fault features. In Reference [
14], bearing fault features were extracted via singular spectrum analysis. Li et al. [
15] utilized the hierarchical fuzzy entropy and Laplacian score to extract the fault signatures of bearings. Zhou et al. [
16] proposed a neighborhood component analysis based feature extraction approach. Liu et al. [
17] proposed a method that combines Hilbert Huang transform (HHT) and singular value decomposition (SVD) to obtain the fault features of bearings. Cheng et al. [
18] proposed an effective fault feature extraction approach by combining empirical mode decomposition (EMD) and SVD. In Reference [
19], multi-scale permutation entropy (MPE) was used to extract fault features. In Reference [
20] a fault feature extraction method based on EEMD, and multi-scale fuzzy entropy was proposed. These developed approaches are of great significance to fault diagnosis. However, some of them are proposed based on the signal decomposition methods, such as EMD, EEMD and wavelet decomposition. The EMD- and EEMD-based methods have modal aliasing problems which may affect the final identification results. A major limitation for the wavelet-based methods is that the analysis results are affected by the selection of wavelet basis functions. How to select wavelet basis functions adaptively is a difficult problem. Some other approaches belong to SVD and entropy based methods, whose effectiveness is easily affected by the parameter setting. In recent years, the cyclostationary theory plays an important role in the fault feature extraction of rotating machinery and it is conducive to improve the diagnosis results of rolling bearings and gears. In Reference [
21], the minimum entropy deconvolution-spectral kurtosis (MED-SK) approach and cyclostationary (CS)-based approaches were investigated and compared. The results show that the CS-based approaches are more superior in detecting the early weak faults. Spectral correlation (SC) is one of the most effective CS-based approaches. Contrary to classical spectral analysis methods, spectral correlation can reveal the non-stationary characteristics of the analyzed signals. Therefore, it shows advantages for detecting bearing faults [
22,
23,
24]. The averaged cyclic periodogram (ACP) has been the most popular and widely used estimator of SC for bearing fault failure detection [
25]. In Reference [
26], the averaged cyclic periodogram was combined with hidden markov model to diagnose the fault of rolling bearings. Antoni investigated the spectral correlation analysis of bearing signals thoroughly and pointed out the spectral correlation method is very suitable for detecting bearing fault signatures in Reference [
27]. However, traditional SC techniques have low computational efficiency. Accordingly, Antoni proposed the fast spectral correlation (Fast-SC) method [
28], which is a novel spectral correlation estimation method. The Fast-SC method not only has the advantages of spectral correlation, but also overcomes the shortcomings of high computational cost. However, the original signals of rolling bearings often contain many noise components and the fault features may be submerged in noise components. In the presence of noise and interference signals, the fast spectral correlation and enhanced envelope spectrums obtained by using Fast-SC always have interference frequencies.
Similarly, fault classification plays a key role in fault diagnosis of rolling bearings. Traditional fault classification methods including: back propagation (BP) neural network, artificial neural network (ANN), deep belief network (DBN), continuous hidden Markov model (CHMM), support vector machine (SVM), genetic algorithm (GA), adaptive fuzzy neural network (ANFIS), and extreme learning machine (ELM). BP neural network is a multilayer feed forward neural network. The prediction results are derived through forward deduction [
29]. However, BP neural networks have the disadvantages of slow learning speed and low accuracy. ANN relies on the complexity of the system to achieve the purpose of processing information by adjusting the interconnected relationships among a large number of internal nodes and has the ability to learn and adapt itself. However, ANN has the possibility of overfitting data [
30]. DBN is a continuous learning process which is layer by layer. In Reference [
31], the accuracy and robustness of DBN is proved, but DBN has the shortcomings of computational complexity. CHMM is a double stochastic process, which has a hidden Markov chain of certain state numbers and a set of random functions. In Reference [
32], CHMM was utilized to classify the faults and the results show that unreasonable parameter settings may affect the accuracy rate of CHMM. The learning strategy of SVM is to maximize the interval, which can eventually be transformed into a solution of a convex quadratic programming problem eventually. In Reference [
33], EMD was used to decompose the signal into intrinsic mode functions (IMFs) and the fault feature was extracted by HHT. Finally, the fault features were input into SVM for recognition. SVM has good generalization ability, but it needs strict adjustment of kernel parameters and cannot solve multi-level problems effectively. In Reference [
34], GA and SVM were combined to recognize the pattern of rolling bearing. In Reference [
35], the time-frequency matrix of rolling bearing signal was calculated to extract fault feature and ANFIS was utilized to classify the pattern of rolling bearing fault. ELM uses random weights between the hidden layer and the input layer in the forward neural network. A method of destructive or adding regular terms is used to solve the output weights in the final output layer to achieve regression or classification [
36,
37,
38]. In Reference [
39], ELM was used for identification of bearing faults. Although ELM is fast and has strong generalization ability, it is limited by a hidden danger of fitting. Random forest (RF) is an advanced classifier. Training of RF is fast and easy to parallelize and it can handle data with high dimensions [
40]. Therefore, RF is an effective and frequently used classifier for classifying bearing faults. In Reference [
41], ReliefF ranking was used to rank the fault features obtained by calculating the statistical characteristics of the signal in the time domain and random forest was further used to identify bearing faults. In Reference [
42], Wang extracted the fault features of bearings by using the wavelet packet decomposition and the classification was completed by RF. In Reference [
43], an intelligent fault diagnosis approach was presented with the combination of ensemble empirical mode decomposition and RF. In Reference [
44], variational mode decomposition was combined with autoregressive model parameters to extract the fault features and RF was used for pattern recognition. The analysis results show that RF has a higher accuracy compared to SVM, genetic algorithm-SVM (GA-SVM) and particle swarm optimization-SVM (PSO-SVM). However, RF is a parameterized classifier and the selection of the parameters of random forest will affect the accuracy of classification.
Considering that the fast spectral correlation is an advanced fault feature extraction technique and the RF is an excellent classifier. The main work of this paper was conducted on the basis of the fast spectral correlation and RF. To complete the accurate fault diagnosis of rolling bearings, an improved fast spectral correlation approach was proposed in this paper by introducing the kurtosis weighting to effectively decrease the effect of noise and highlight the fault characteristics. Moreover, a particle swarm optimization-random forest (PSO-RF) classification algorithm was proposed, which can adaptively optimize the parameters and improve the classification accuracy of RF. On the basis of the advantages of the improved fast spectral correlation and PSO-RF, a fault diagnosis method for rolling bearings was proposed with the combination of improved fast spectral correlation and PSO-RF in this work. The improved fast spectral correlation was firstly employed to extract the fault feature vectors of the faulty bearings. Then, the state classification of rolling bearings can be accomplished by training and testing the obtained fault feature vectors using the PSO-RF classifier.
This paper is structured as follows. In
Section 2, an approach of fault feature extraction based on the improved fast spectral correlation method is given briefly.
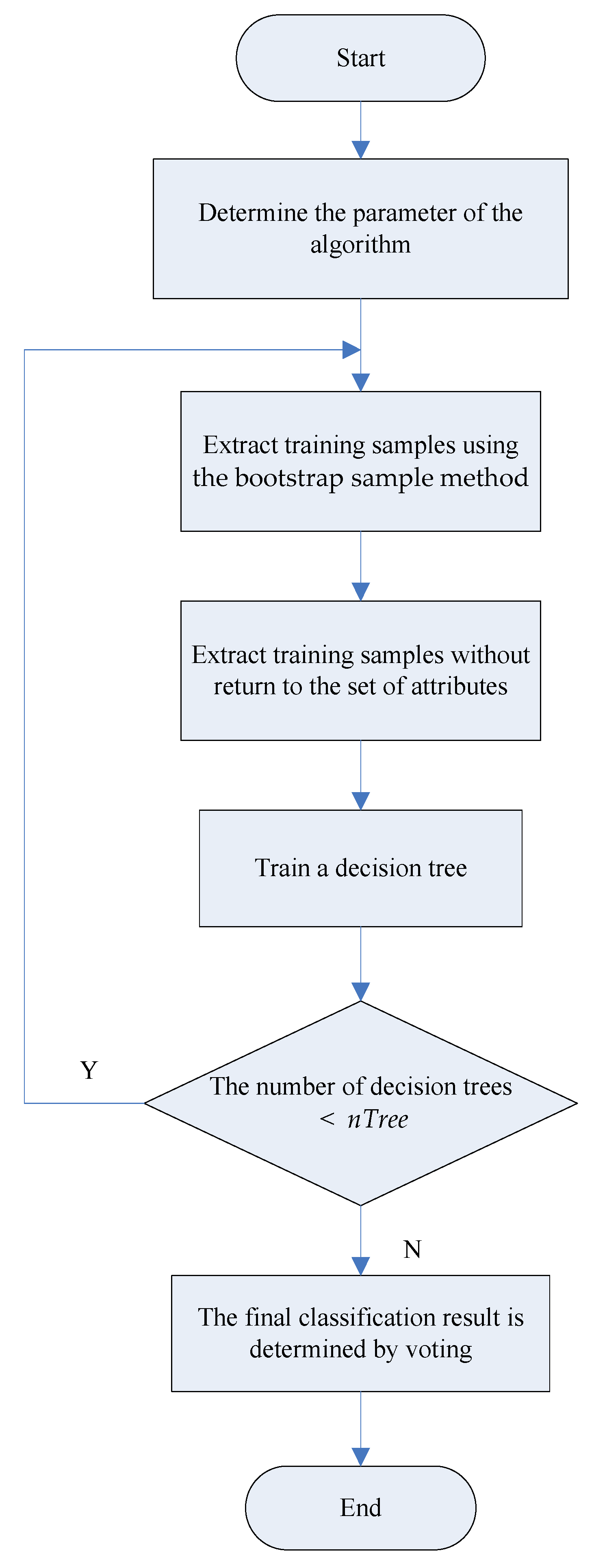
Section 3 describes the details of random forest based on particle swarm optimization.
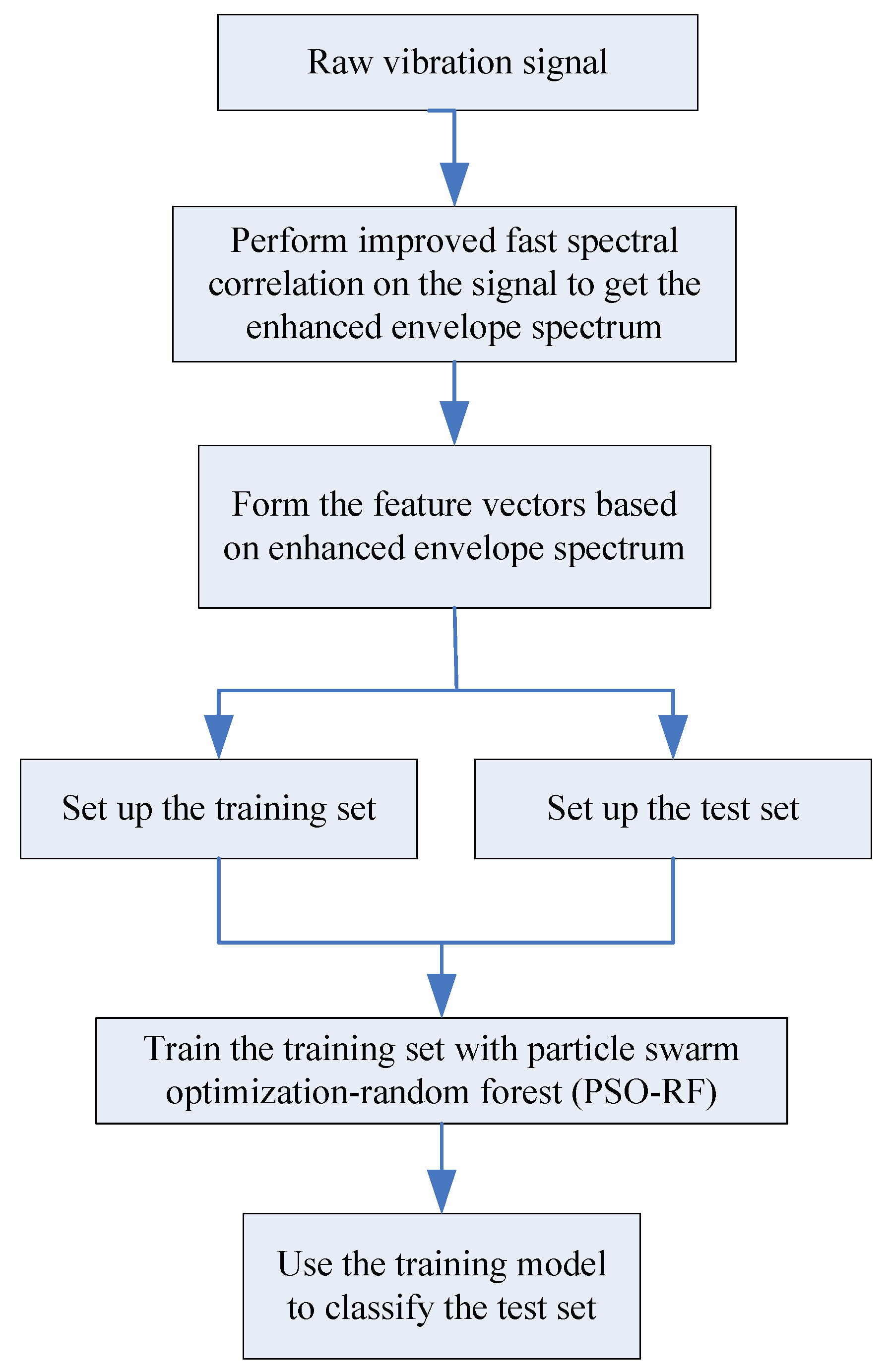
Section 4 introduces the framework of the proposed method. In
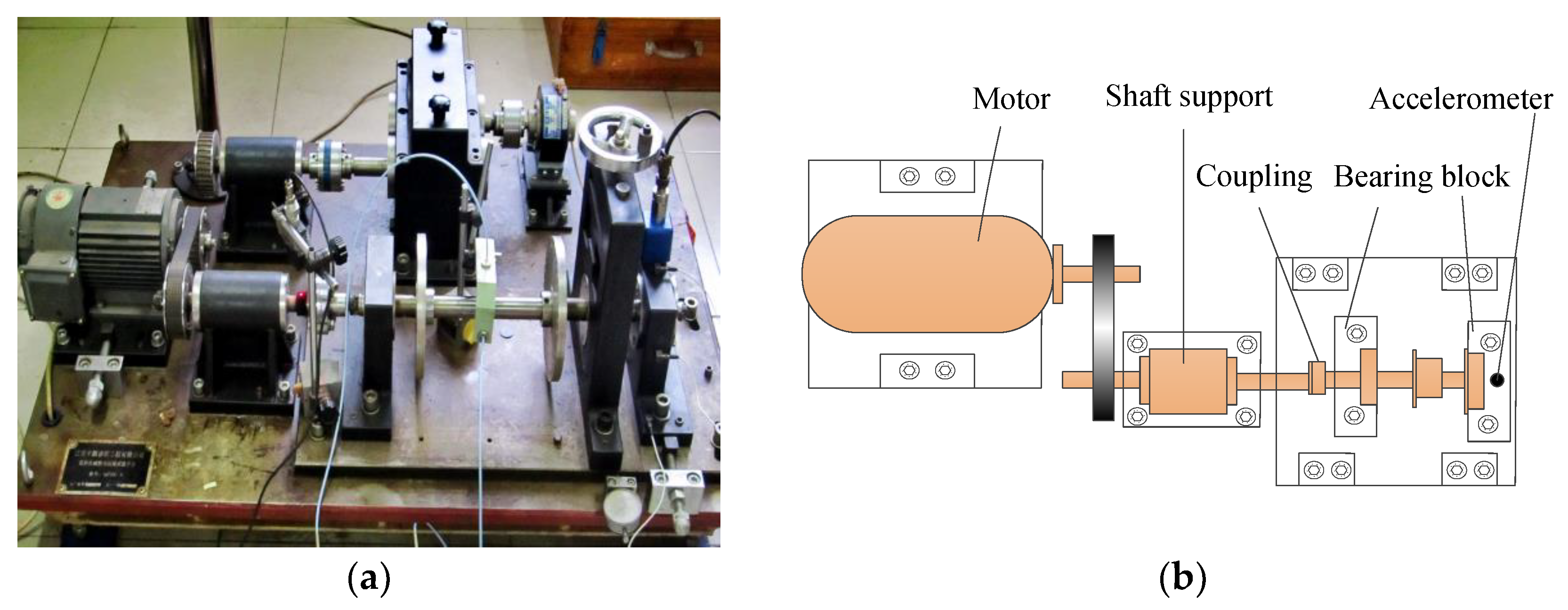
Section 5, the experiments are presented to investigate and validate the proposed method for state recognition of rolling bearing. Finally, conclusions are drawn in
Section 6.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}