Correcting Inertial Dead Reckoning Location Using Collision Avoidance Velocity-Based Map Matching


Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Foot-Mounted Inertial Navigation System
| Algorithm 1 Pseudocode for the inertial positioning system with zero-velocity updates and collision avoidance velocity map matching. |
|
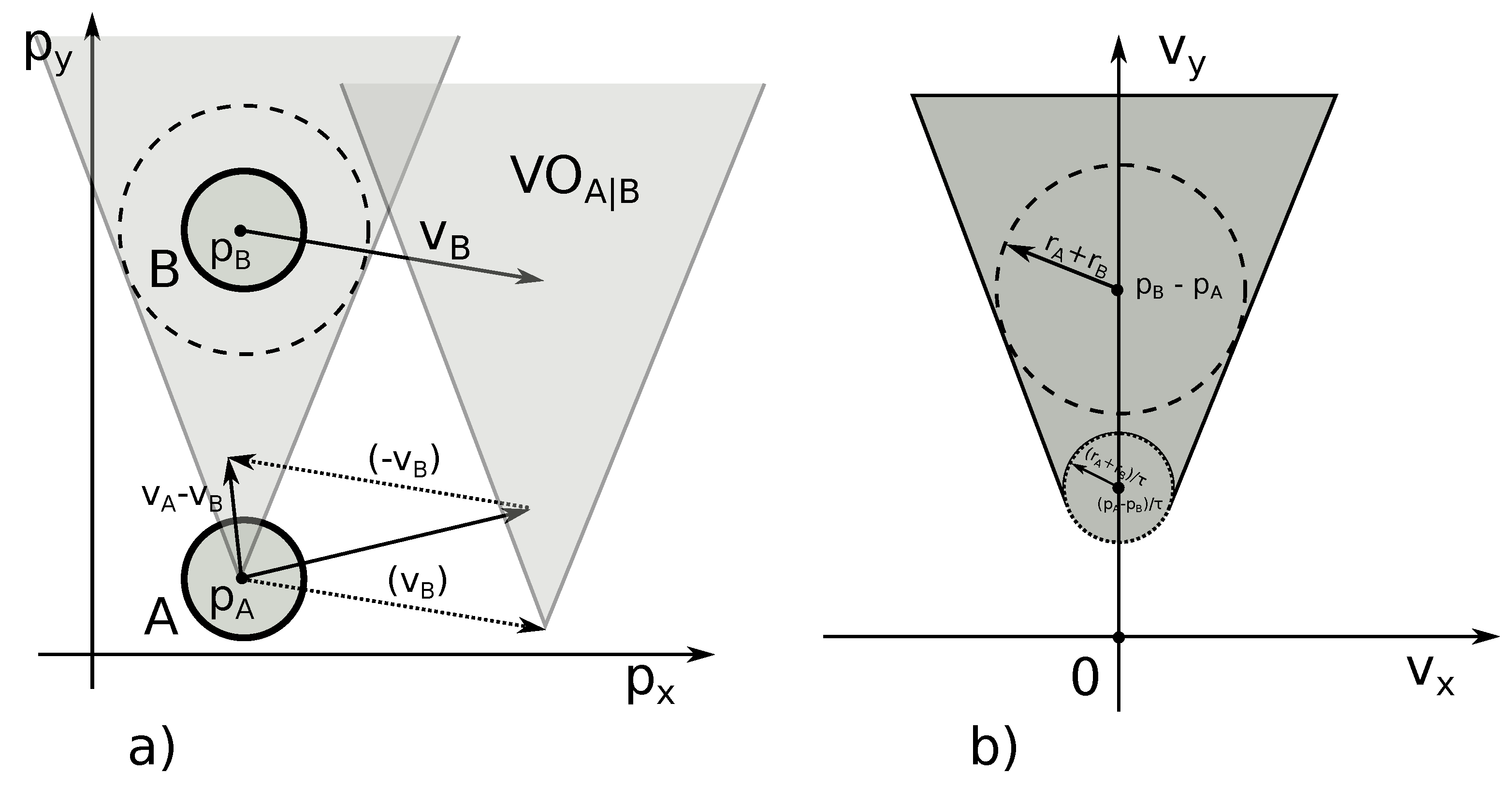
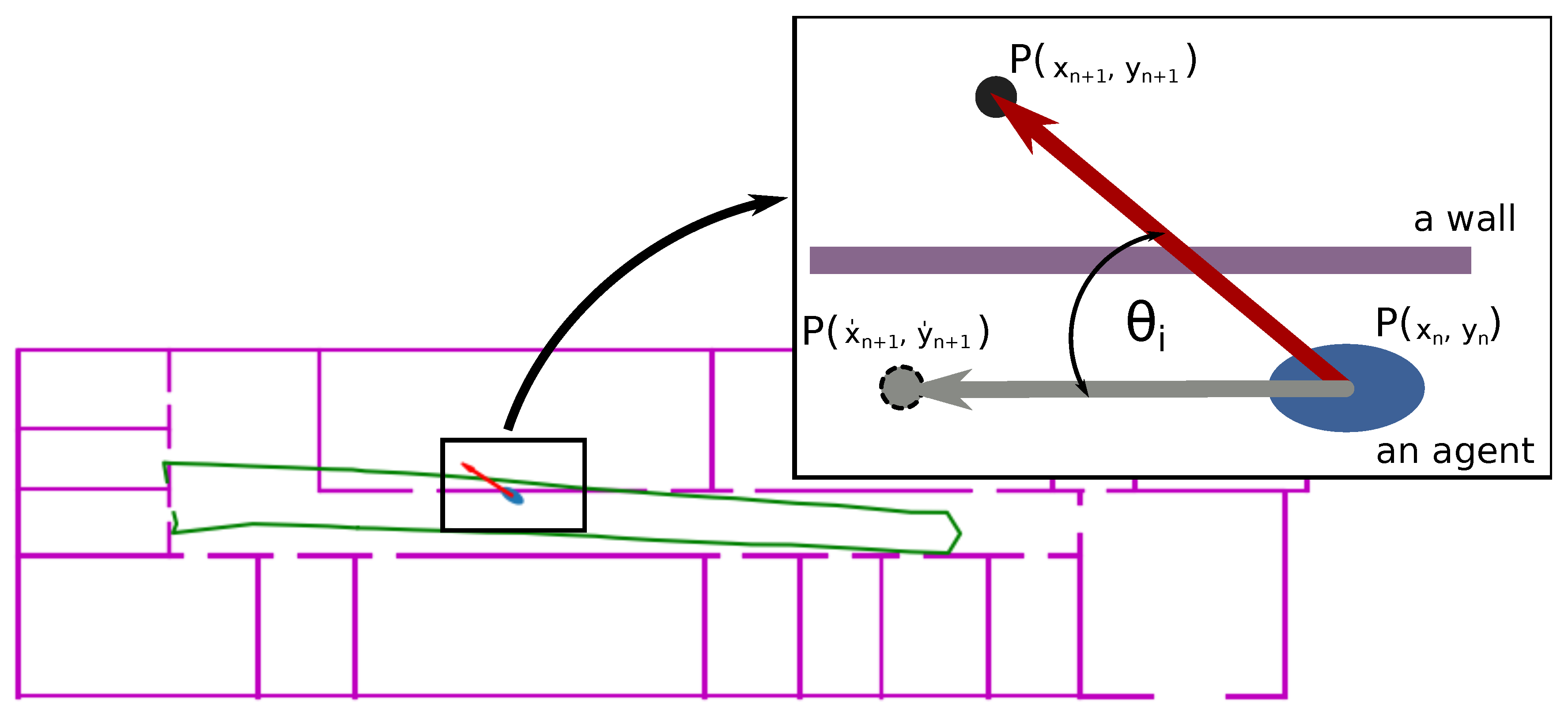
2.2. Collision Avoidance Velocity
3. Results
3.1. Instrumentation
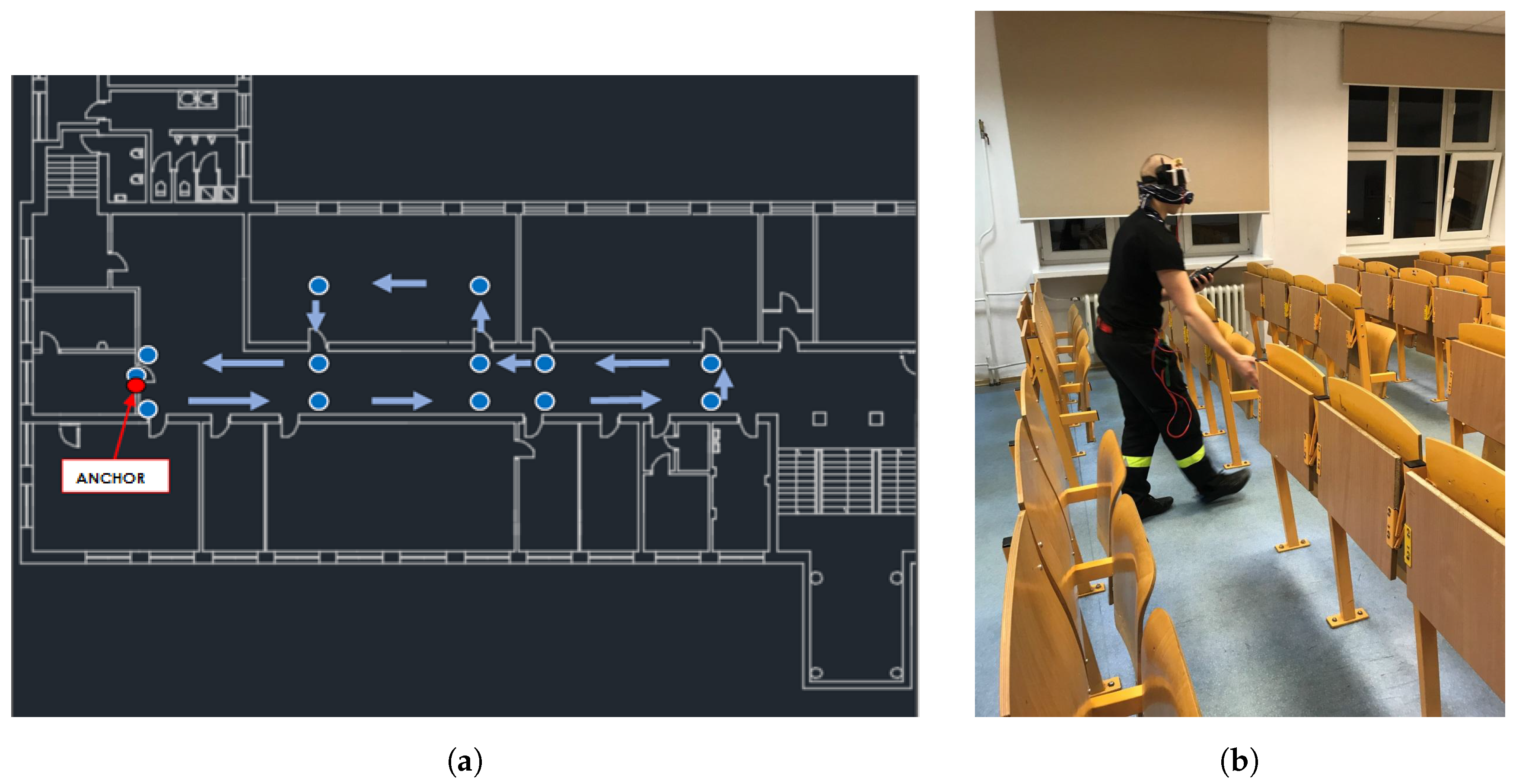
3.2. Experimental Setup
3.3. Experimental Results
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BLE | Bluetooth Low Energy |
| CAD | Computer Aided Design |
| CHAIN | Cardinal Heading Aided Inertial Navigation |
| DAU | Data Acquisition Unit |
| DR | Dead Reckoning |
| GCS | Global coordinate system |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| INS | Inertial Navigation System |
| IPSN | International Conference on Information Processing in Sensor Networks |
| LCS | Local coordinate system |
| MEMS | Micro Electro Mechanical Sensor |
| RSSI | Received Signal Strength Indicator |
| MAPN | Map-Aided Pedestrian/Individual Navigation |
| ORCA | Optimal Reciprocal Collision Avoidance |
| RMSE | Root Mean Squared Error |
| ToF | Time-of-Flight |
| UWB | Ultra Wide Band |
References
- Fahy, R.F.; LeBlanc, P.R.; Molis, J.L. Firefighter Fatalities in the United States—2016; Technical Report; National Fire Protection Association: Quincy, MA, USA, 2017. [Google Scholar]
- International Association of Fire Chiefs. Firefighter Near-Miss 2016 Annual Report; Technical Report; National Firefighter Near Miss Program: Fairfax, VA, USA, 2017. [Google Scholar]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report; University of Cambridge, Computer Laboratory: Cambridge, UK, 2007. [Google Scholar]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Skog, I.; Händel, P.; Hari, K. Foot-mounted INS for everybody-an open-source embedded implementation. In Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 140–145. [Google Scholar]
- Angermann, M.; Robertson, P.; Kemptner, T.; Khider, M. A high precision reference data set for pedestrian navigation using foot-mounted inertial sensors. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Angermann, M.; Robertson, P. Footslam: Pedestrian simultaneous localization and mapping without exteroceptive sensors-hitchhiking on human perception and cognition. Proc. IEEE 2012, 100, 1840–1848. [Google Scholar] [CrossRef]
- Zhang, R.; Hoflinger, F.; Reindl, L. Inertial sensor based indoor localization and monitoring system for emergency responders. IEEE Sens. J. 2013, 13, 838–848. [Google Scholar] [CrossRef]
- Meina, M.; Krasuski, A.; Rykaczewski, K. Model fusion for inertial-based personal dead reckoning systems. In Proceedings of the Sensors Applications Symposium (SAS), Zadar, Croatia, 13–15 April 2015; pp. 1–6. [Google Scholar]
- Wang, Z.; Zhao, H.; Qiu, S.; Gao, Q. Stance-phase detection for ZUPT-aided foot-mounted pedestrian navigation system. IEEE/ASME Trans. Mechatron. 2015, 20, 3170–3181. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Skog, I.; Händel, P. A note on the limitations of ZUPTs and the implications on sensor error modeling. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Cox, D.B. Integration of GPS with inertial navigation systems. Navigation 1978, 25, 236–245. [Google Scholar] [CrossRef]
- Link, J.A.B.; Smith, P.; Viol, N.; Wehrle, K. Footpath: Accurate map-based indoor navigation using smartphones. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar]
- Klepal, M.; Beauregard, S. A novel backtracking particle filter for pattern matching indoor localization. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, San Francisco, CA, USA, 19 September 2008; pp. 79–83. [Google Scholar]
- Beauregard, S.; Klepal, M. Indoor PDR performance enhancement using minimal map information and particle filters. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 141–147. [Google Scholar]
- Davidson, P.; Piché, R. A survey of selected indoor positioning methods for smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Norman, J. Search and Rescue. In Fire Officer’s Handbook of Tactics; Fire Engineering Books: Tulsa, OK, USA, 2012. [Google Scholar]
- Honey, S.K.; Zavoli, W.B. A novel approach to automotive navigation and map display. IEEE Trans. Ind. Electron. 1985, 34, 40–43. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef]
- Bernstein, D.; Kornhauser, A. An Introduction to Map Matching for Personal Navigation Assistants; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1998. [Google Scholar]
- White, C.E.; Bernstein, D.; Kornhauser, A.L. Some map matching algorithms for personal navigation assistants. TTransp. Res. Part C Emerg. Technol. 2000, 8, 91–108. [Google Scholar] [CrossRef]
- Phuyal, B.P. Method and use of aggregated dead reckoning sensor and GPS data for map matching. In Proceedings of the ION GPS 2002: 15 th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, OR, USA, 24–27 September 2002. [Google Scholar]
- Noureldin, A.; Karamat, T.B.; Eberts, M.D.; El-Shafie, A. Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications. IEEE Trans. Veh. Technol. 2009, 58, 1077–1096. [Google Scholar] [CrossRef]
- Obradovic, D.; Lenz, H.; Schupfner, M. Fusion of map and sensor data in a modern car navigation system. J. VLSI Signal Process. Syst. Signal Image Video Technol. 2006, 45, 111–122. [Google Scholar] [CrossRef]
- Bao, S.D.; Meng, X.L.; Xiao, W.; Zhang, Z.Q. Fusion of inertial/magnetic sensor measurements and map information for pedestrian tracking. Sensors 2017, 17, 340. [Google Scholar] [CrossRef] [PubMed]
- Medina, D.A.; Schwaab, M.; Plaia, D.; Romanovas, M.; Traechtler, M.; Manoli, Y. A foot-mounted pedestrian localization system with map motion constraints. In Proceedings of the 12th IEEE Workshop on Positioning, Navigation and Communications (WPNC-15), Dresden, Germany, 11–12 March 2015. [Google Scholar]
- Ascher, C.; Kessler, C.; Wankerl, M.; Trommer, G. Dual IMU indoor navigation with particle filter based map-matching on a smartphone. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–5. [Google Scholar]
- Leppäkoski, H.; Collin, J.; Takala, J. Pedestrian navigation based on inertial sensors, indoor map, and WLAN signals. J. Signal Process. Syst. 2013, 71, 287–296. [Google Scholar] [CrossRef]
- Pinchin, J.; Hide, C.; Moore, T. A particle filter approach to indoor navigation using a foot mounted inertial navigation system and heuristic heading information. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–10. [Google Scholar]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M. Foot-mounted pedestrian navigation based on particle filter with an adaptive weight updating strategy. J. Navig. 2015, 68, 23–38. [Google Scholar] [CrossRef]
- Zampella, F.; Ruiz, A.R.J.; Granja, F.S. Indoor positioning using efficient map matching, RSS measurements, and an improved motion model. IEEE Trans. Veh. Technol. 2015, 64, 1304–1317. [Google Scholar] [CrossRef]
- Franklin, S.; Graesser, A. Is it an Agent, or just a Program? A Taxonomy for Autonomous Agents. In Proceedings of the International Workshop on Agent Theories, , Architectures, and Languages, Budapest, Hungary, 12–13 August 1996; Springer: Berlin/Heidelberg, Germany, 1996; pp. 21–35. [Google Scholar]
- Madgwick, S. An efficient orientation filter for inertial and inertial/magnetic sensor arrays. Rep. x-io Univ. Bristol (UK) 2010, 25, 113–118. [Google Scholar]
- Park, S.K.; Suh, Y.S. A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef] [PubMed]
- Van Den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal n-body collision avoidance. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2011; pp. 3–19. [Google Scholar]
- Van den Berg, J.; Lin, M.; Manocha, D. Reciprocal velocity obstacles for real-time multi-agent navigation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2008), Pasadena, CA, USA, 19–23 May 2008; pp. 1928–1935. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Foerster, J.R. The effects of multipath interference on the performance of UWB systems in an indoor wireless channel. In Proceedings of the 2001 IEEE VTS 53rd Vehicular Technology Conference (VTC 2001), Rhodes, Greece, 6–9 May 2001; Volume 2, pp. 1176–1180. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial No. 1 | |||
|---|---|---|---|
| Step | Real Position [m] | INS Position [m] | Error [m] |
| 0 | (5.12, 8.40) | (5.11, 8.39) | 0.01 |
| 6 | (12.27, 8.40) | (13.84, 8.14) | 1.59 |
| 12 | (20.90, 8.40) | (20.53, 8.27) | 0.39 |
| 17 | (25.90, 8.40) | (26.76, 8.04) | 0.93 |
| 21 | (31.60, 8.40) | (30.77, 8.02) | 0.91 |
| 26 | (35.85, 8.40) | (31.28, 7.19) | 4.73 |
| 30 | (31.60, 8.40) | (27.24, 7.39) | 4.48 |
| 34 | (25.90, 8.40) | (23.37, 7.63) | 2.64 |
| 40 | (20.90, 8.40) | (15.66, 8.17) | 5.25 |
| 46 | (12.27, 8.40) | (9.03, 8.48) | 3.24 |
| 51 | (5.12, 8.40) | (4.32, 8.77) | 0.88 |
| Test | INS | Map Matching Algorithm |
|---|---|---|
| Test I | 3.63 [m] | 3.01 [m] |
| Test II | 3.26 [m] | 0.73 [m] |
| Test III | 5.59 [m] | 1.15 [m] |
| Average | 4.16 [m] | 1.63 [m] |
| Test | INS | Map Matching Algorithm |
|---|---|---|
| Test I | 4.16 [m] | 3.71 [m] |
| Test II | 3.89 [m] | 2.12 [m] |
| Test III | 7.06 [m] | 2.15 [m] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krasuski, A.; Meina, M. Correcting Inertial Dead Reckoning Location Using Collision Avoidance Velocity-Based Map Matching. Appl. Sci. 2018, 8, 1830. https://doi.org/10.3390/app8101830
Krasuski A, Meina M. Correcting Inertial Dead Reckoning Location Using Collision Avoidance Velocity-Based Map Matching. Applied Sciences. 2018; 8(10):1830. https://doi.org/10.3390/app8101830
Chicago/Turabian StyleKrasuski, Adam, and Michał Meina. 2018. "Correcting Inertial Dead Reckoning Location Using Collision Avoidance Velocity-Based Map Matching" Applied Sciences 8, no. 10: 1830. https://doi.org/10.3390/app8101830
APA StyleKrasuski, A., & Meina, M. (2018). Correcting Inertial Dead Reckoning Location Using Collision Avoidance Velocity-Based Map Matching. Applied Sciences, 8(10), 1830. https://doi.org/10.3390/app8101830