Application of Fiber Bragg Grating Sensing Technology for Bolt Force Status Monitoring in Roadways


Abstract
:1. Introduction
2. Structure and Principle of FBG Bolt Force Sensor
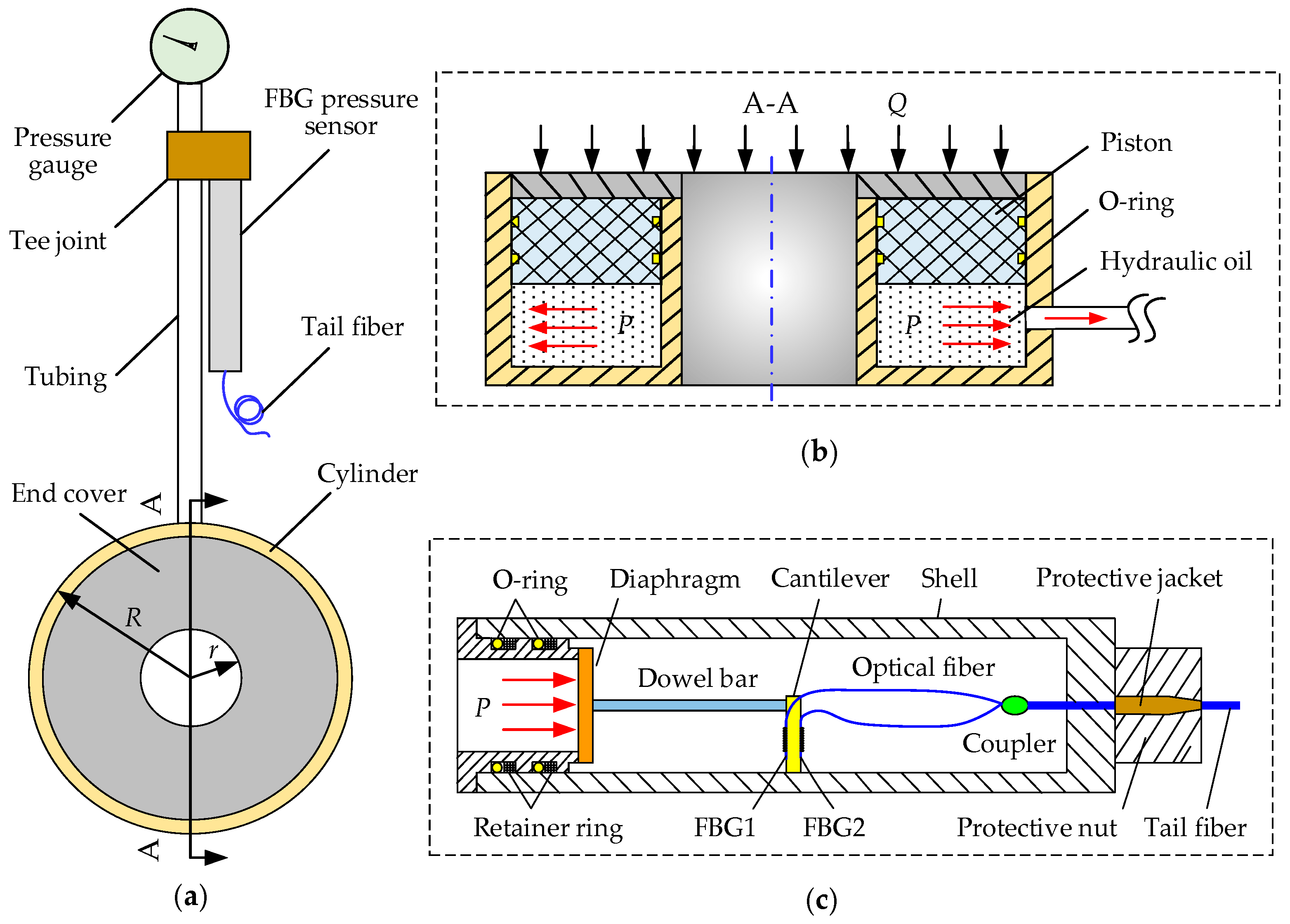
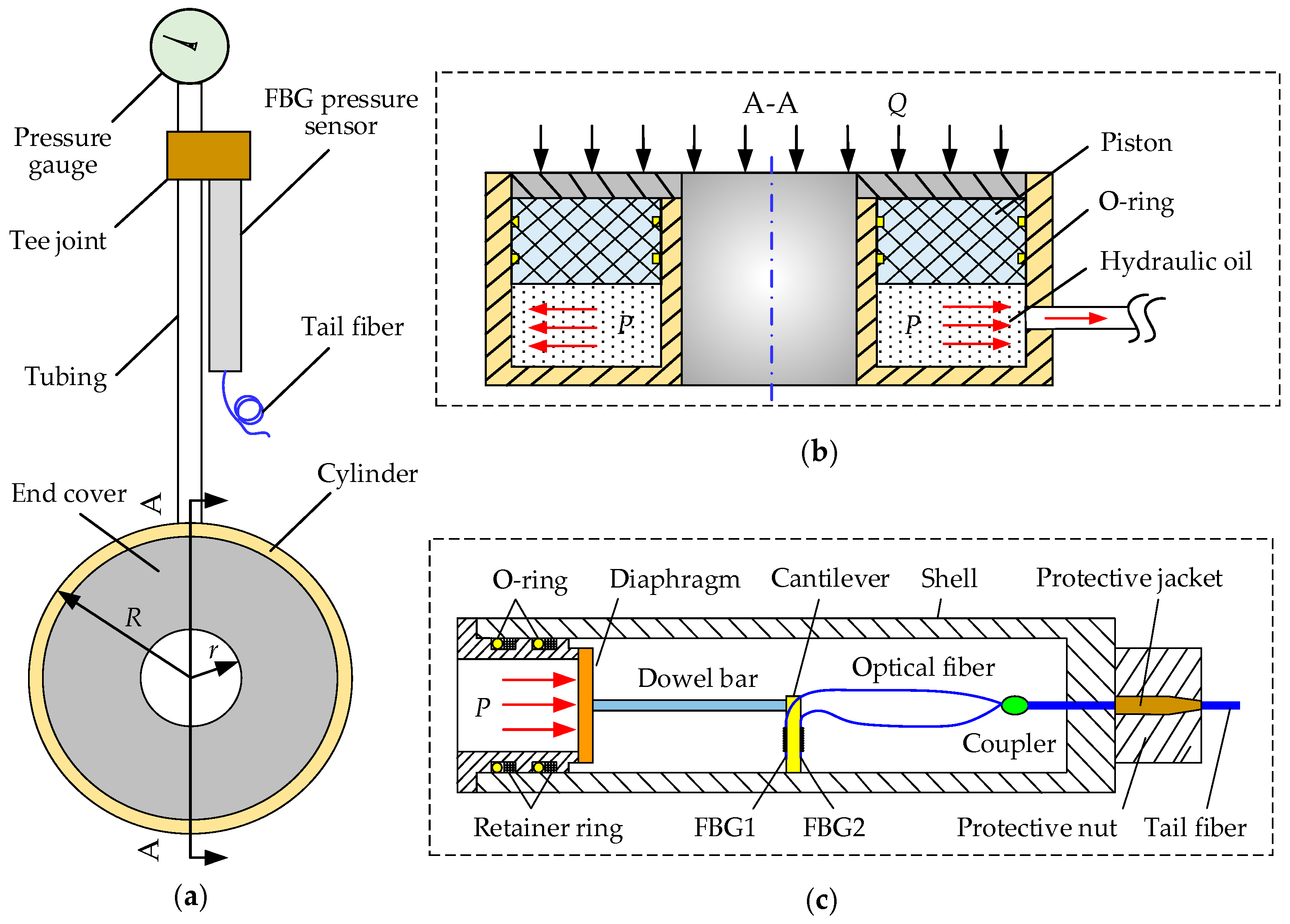
2.1. Structural Design
2.2. Measuring Principle
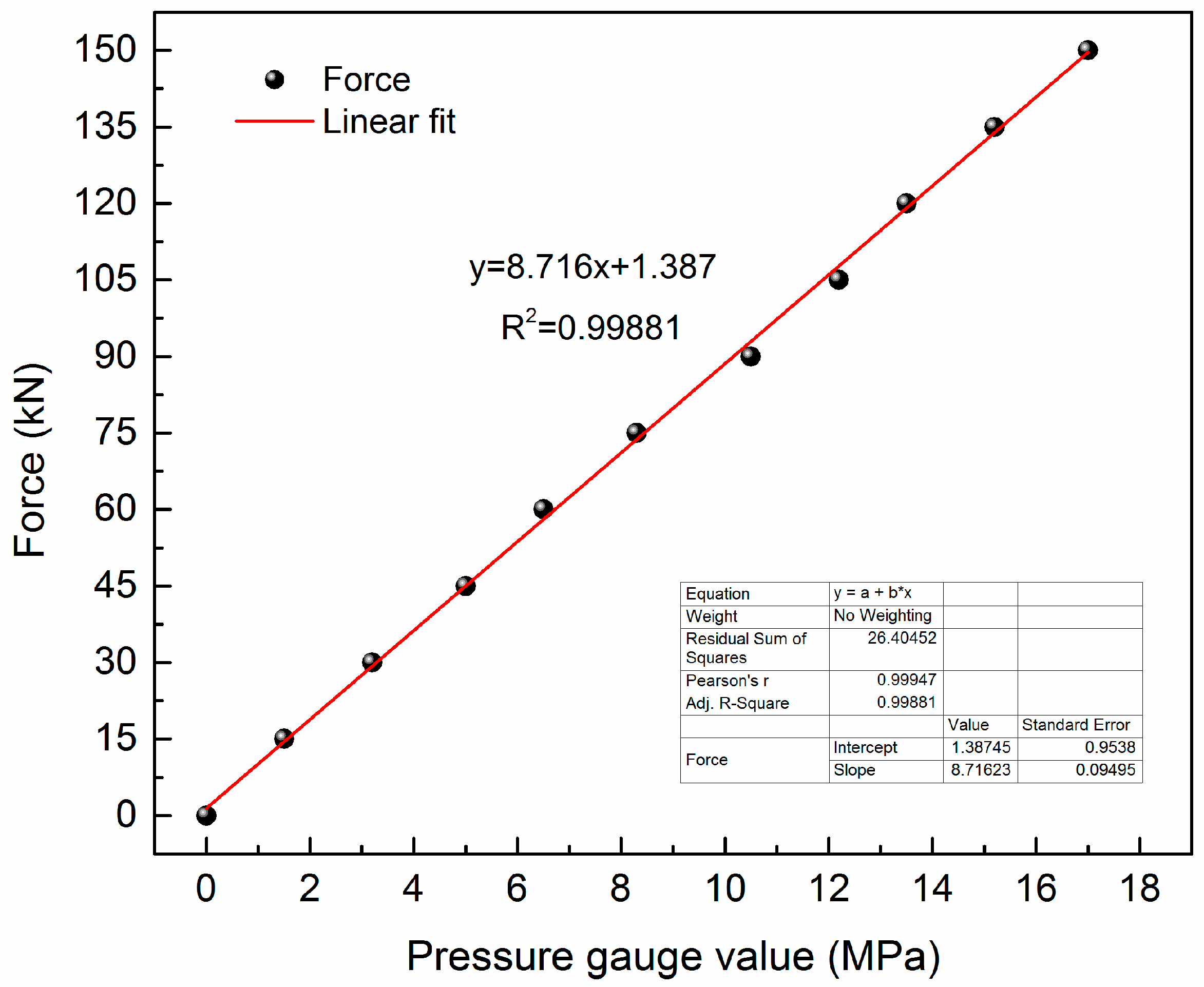
3. Sensor Performance Experiment
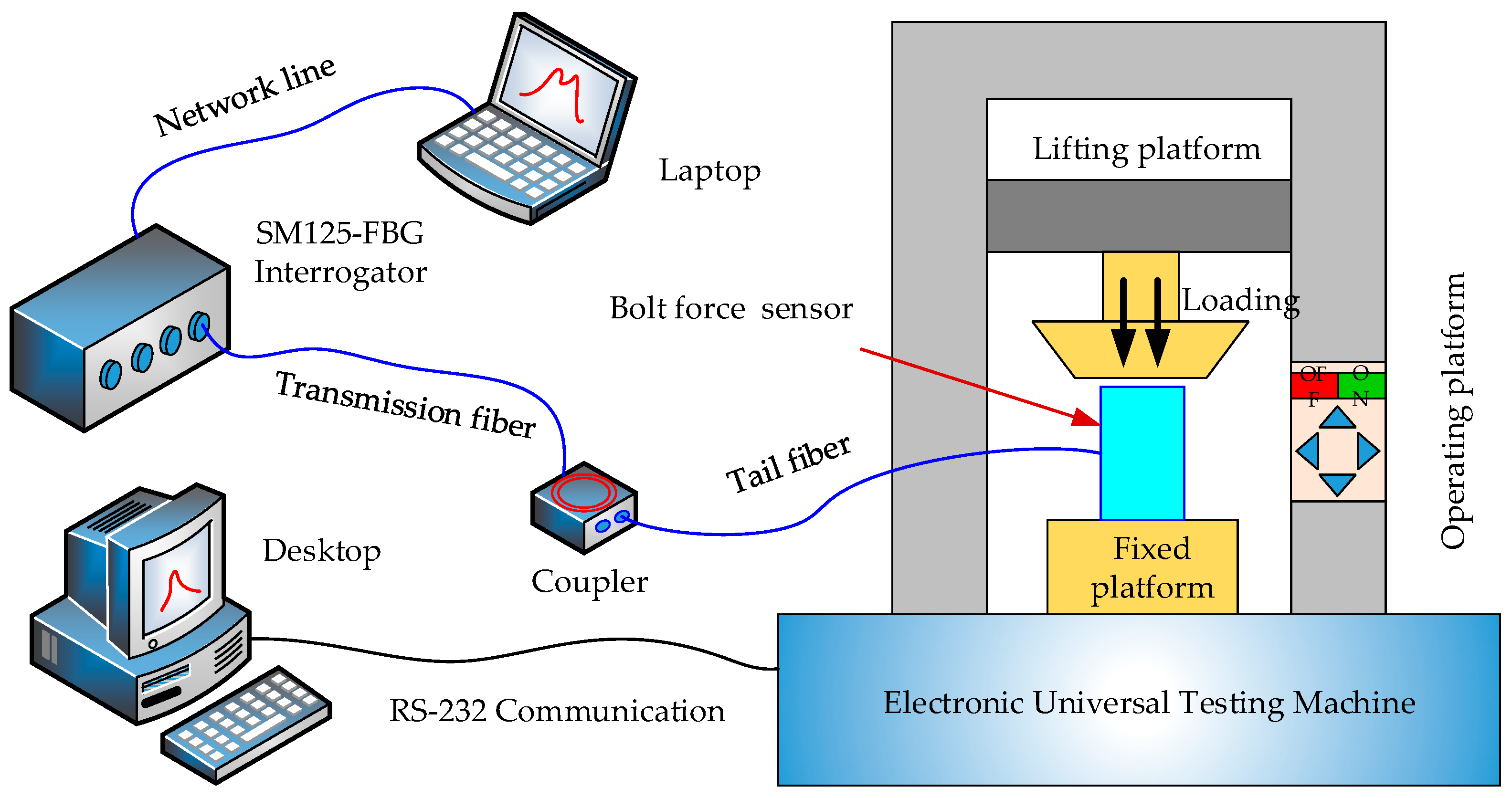
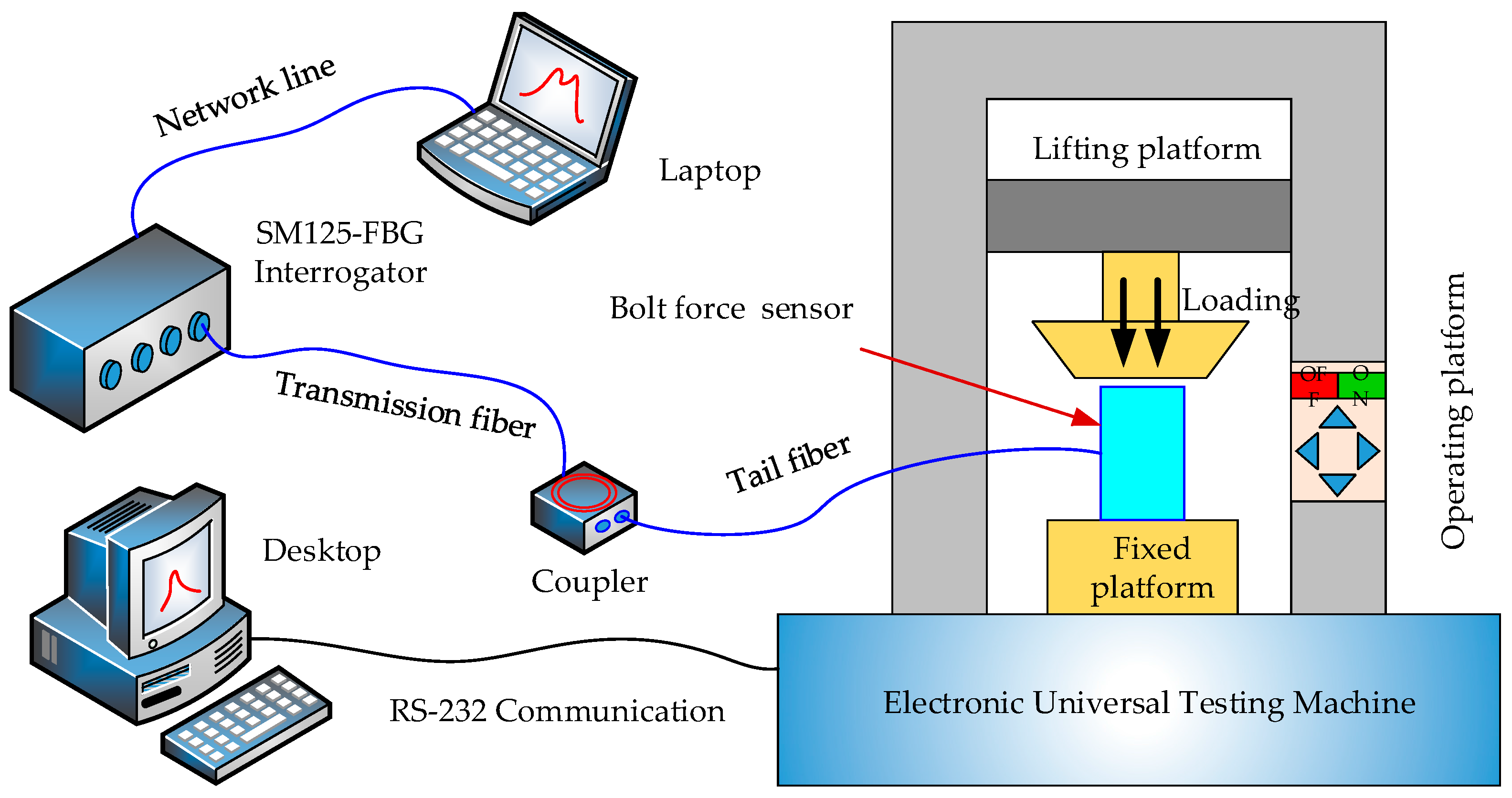
3.1. Experimental Devices and Process
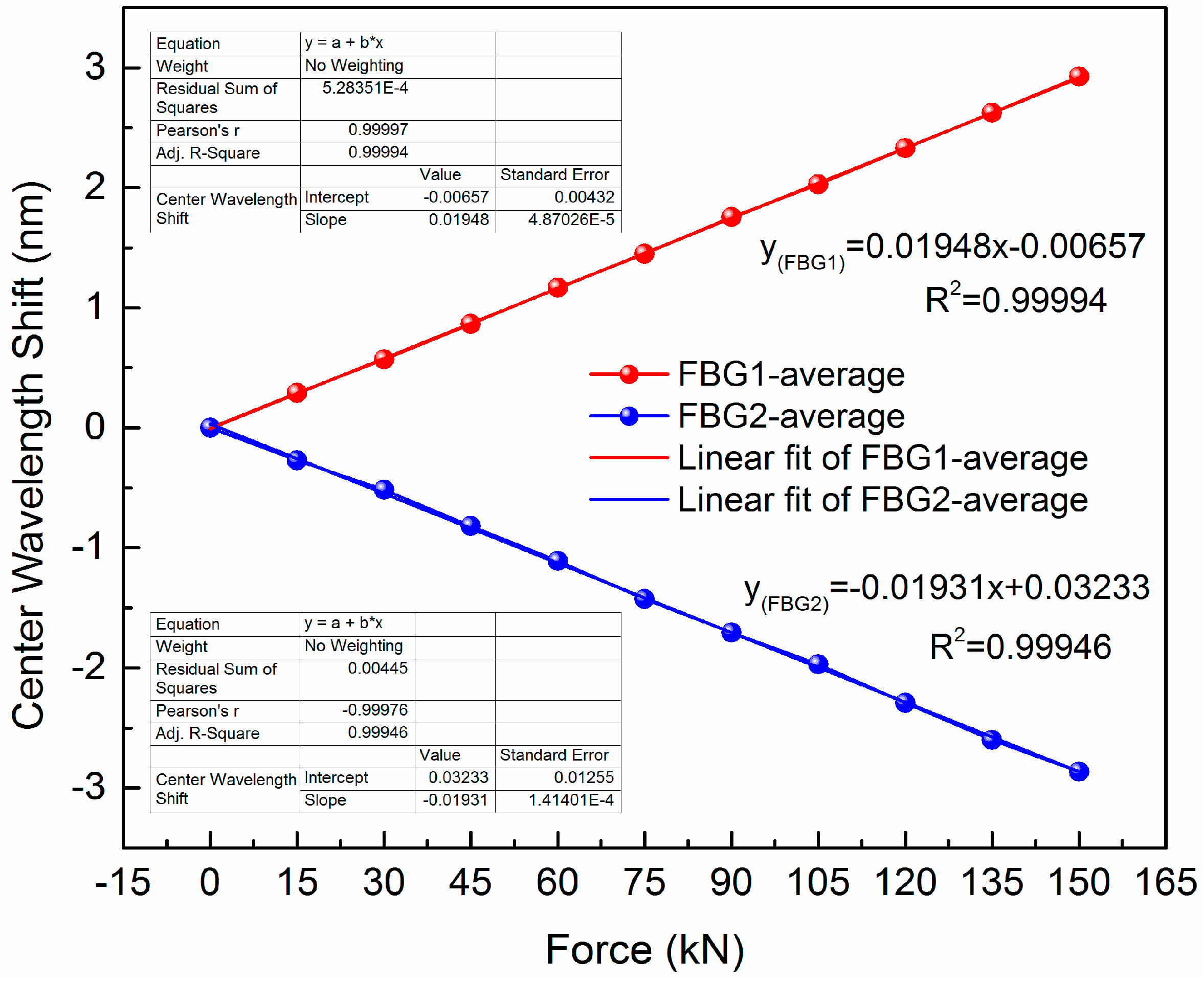
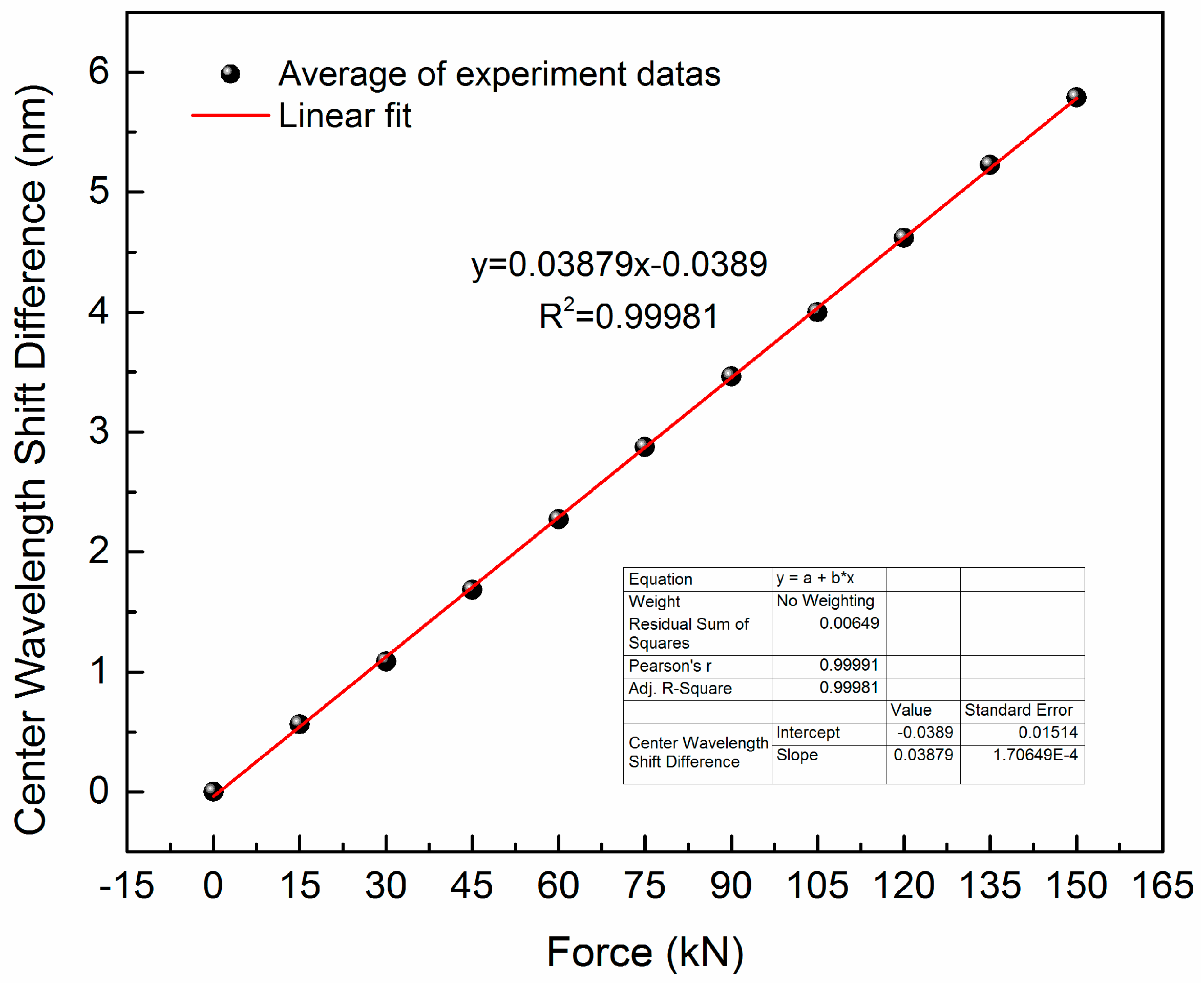
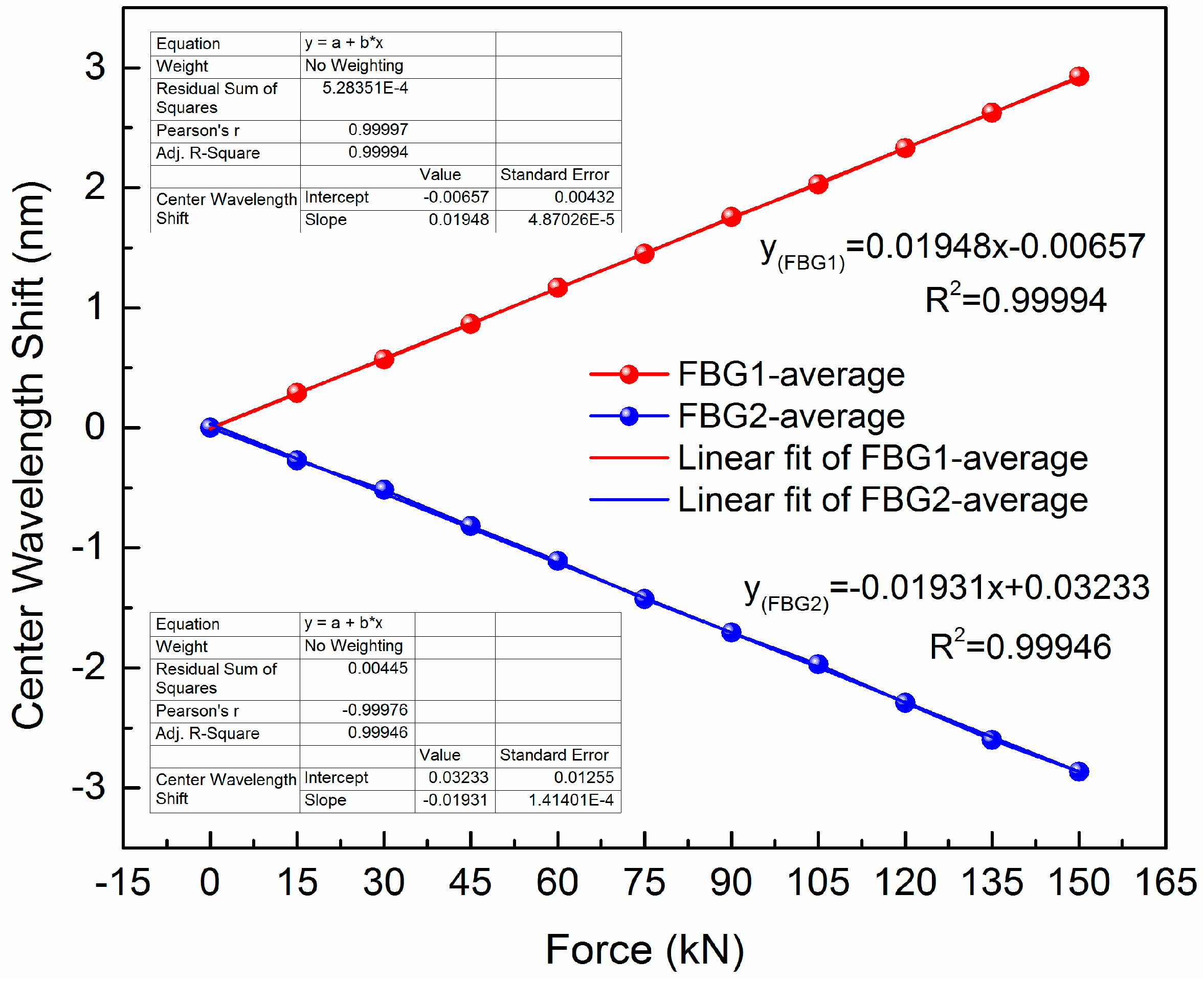
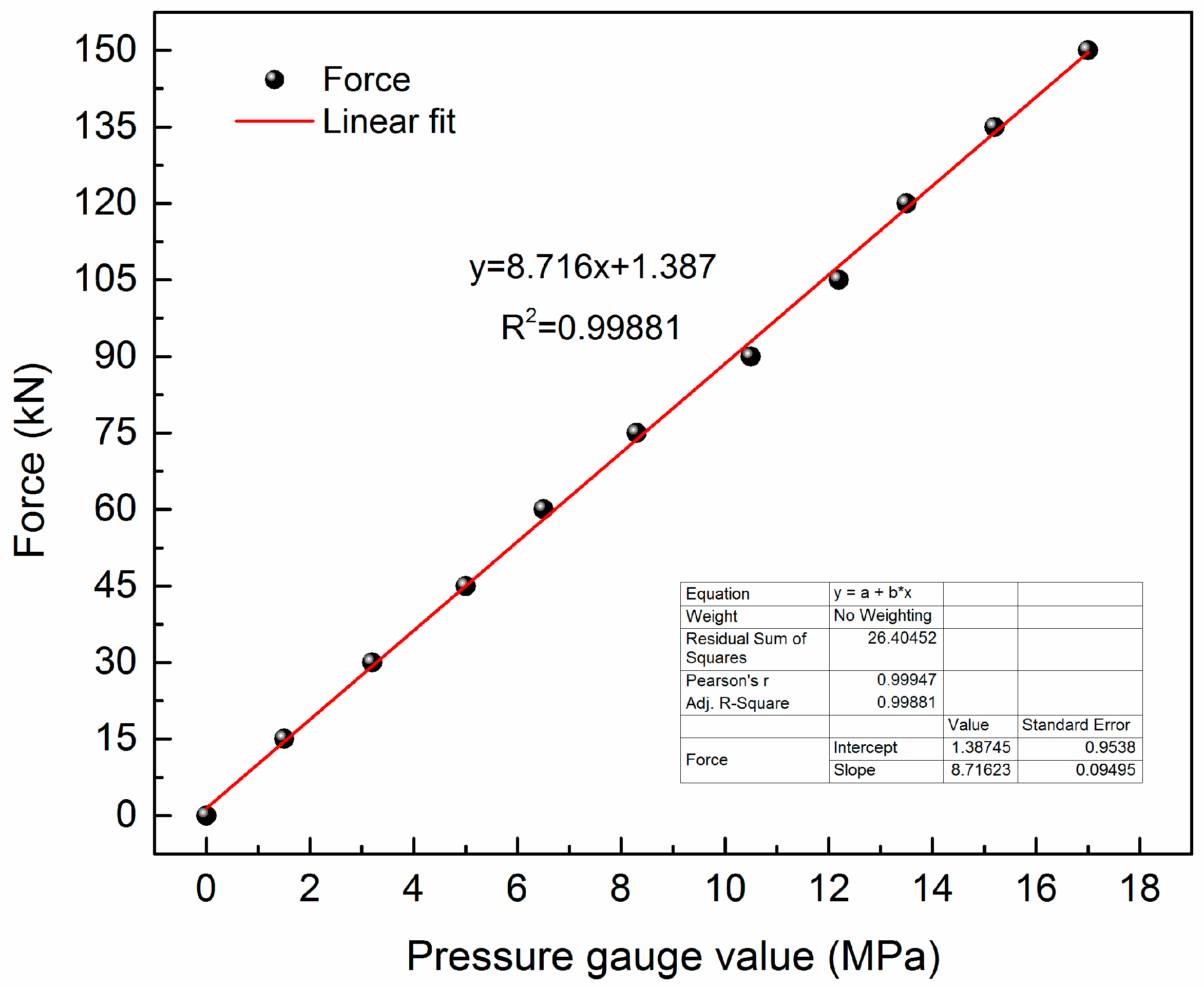
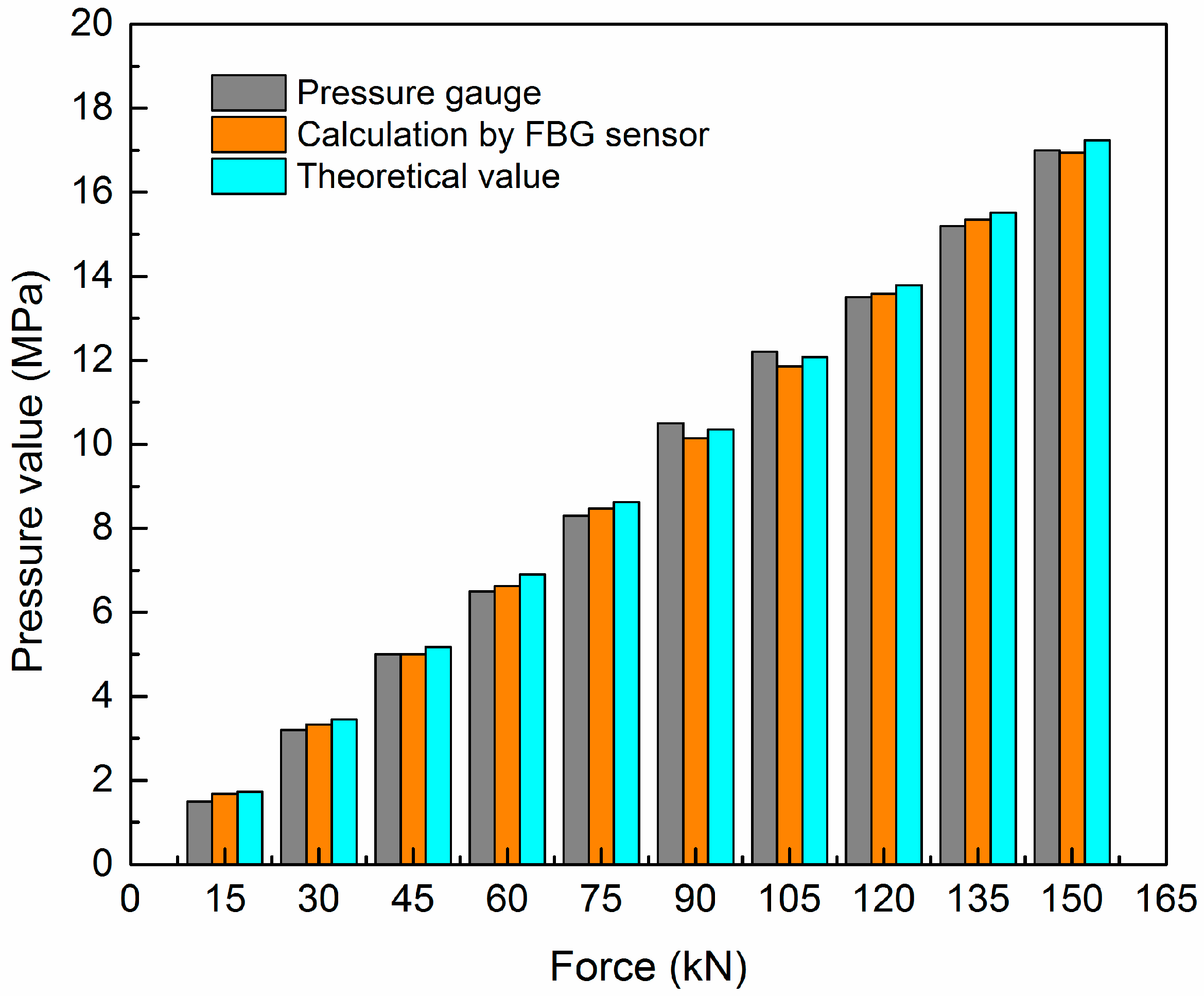
3.2. Analysis of Experimental Results
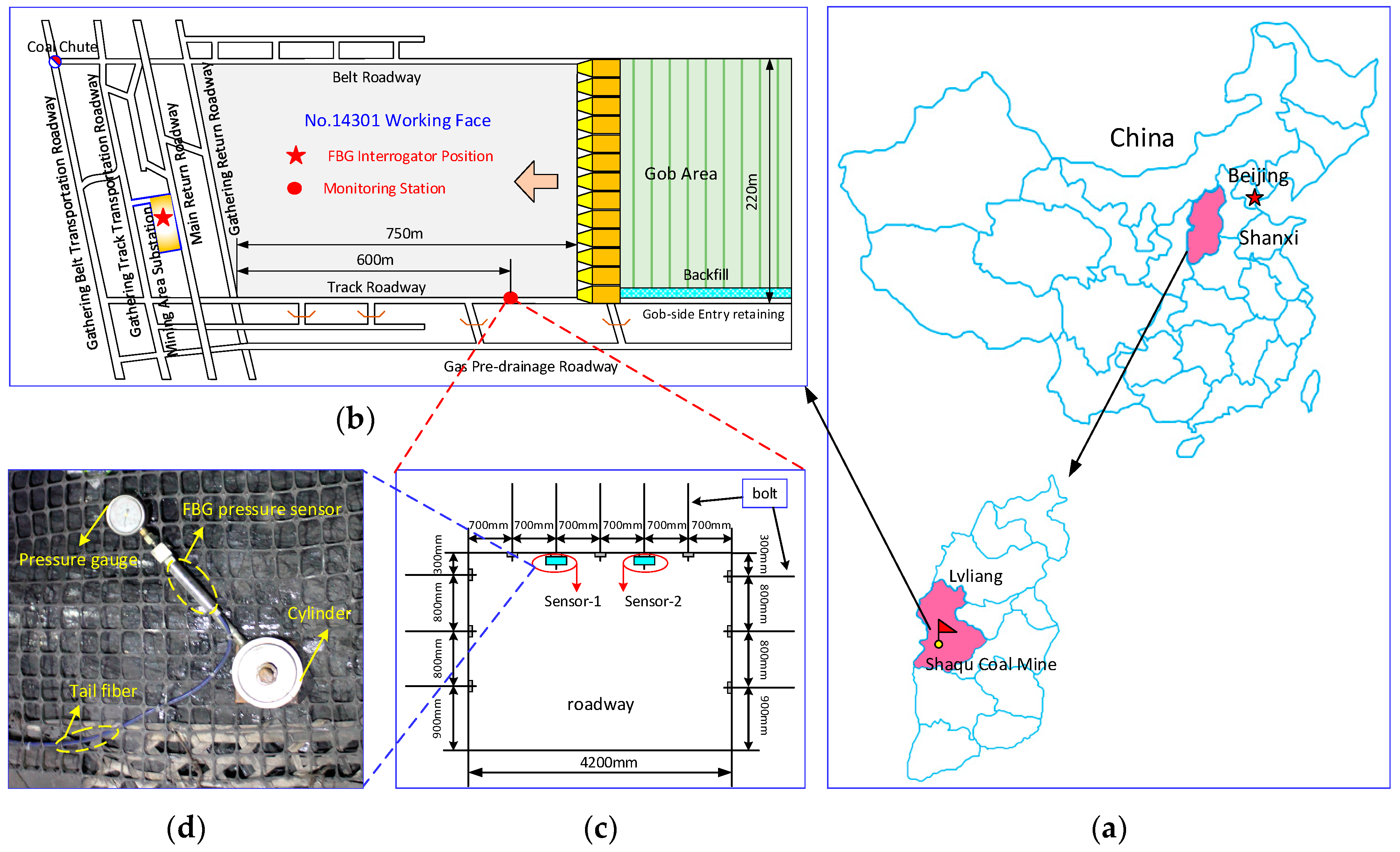
4. Application of FBG Sensors for Bolts Force Monitoring in Coal Mine Roadway
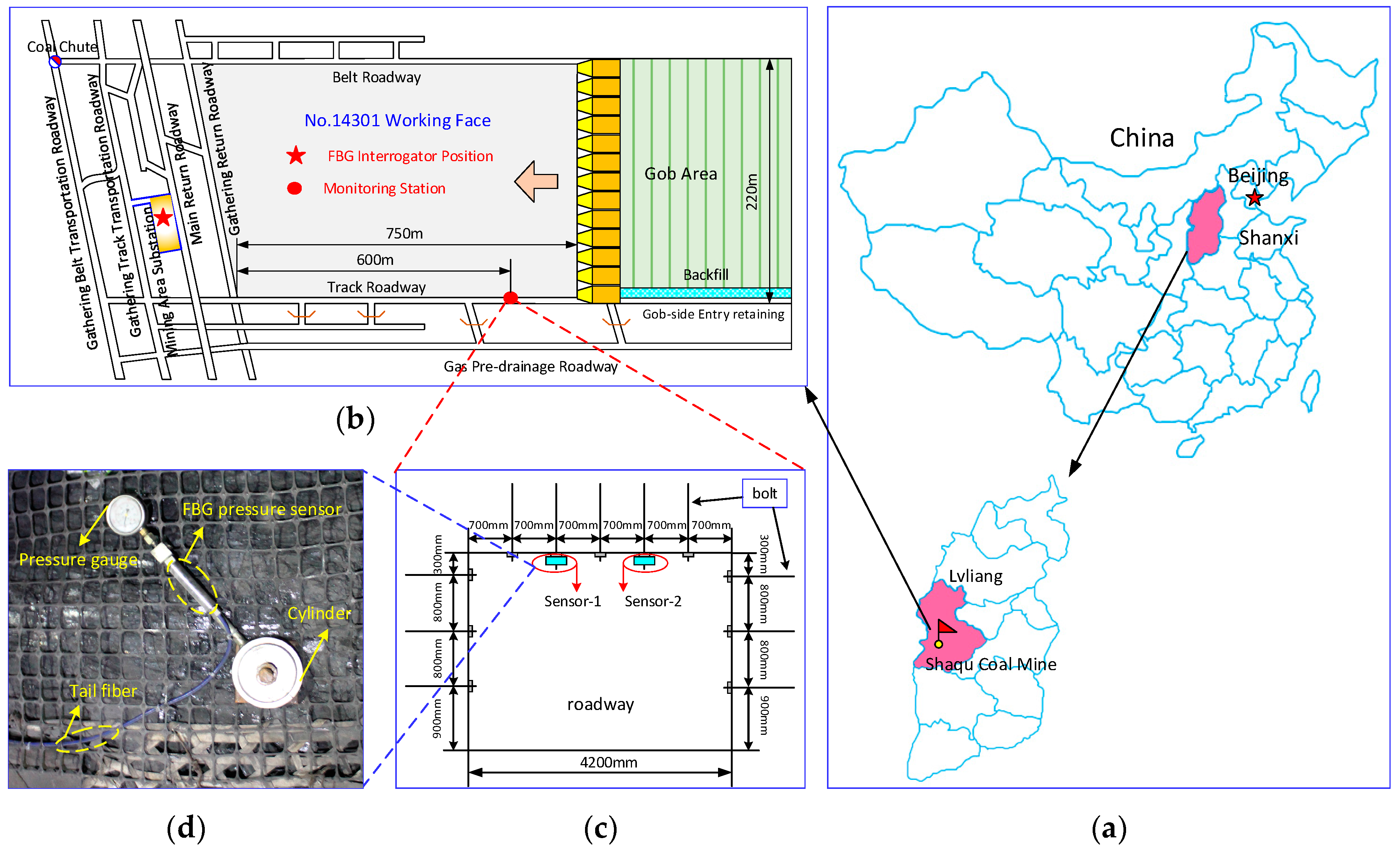
4.1. Engineering Overview and Monitoring Scheme
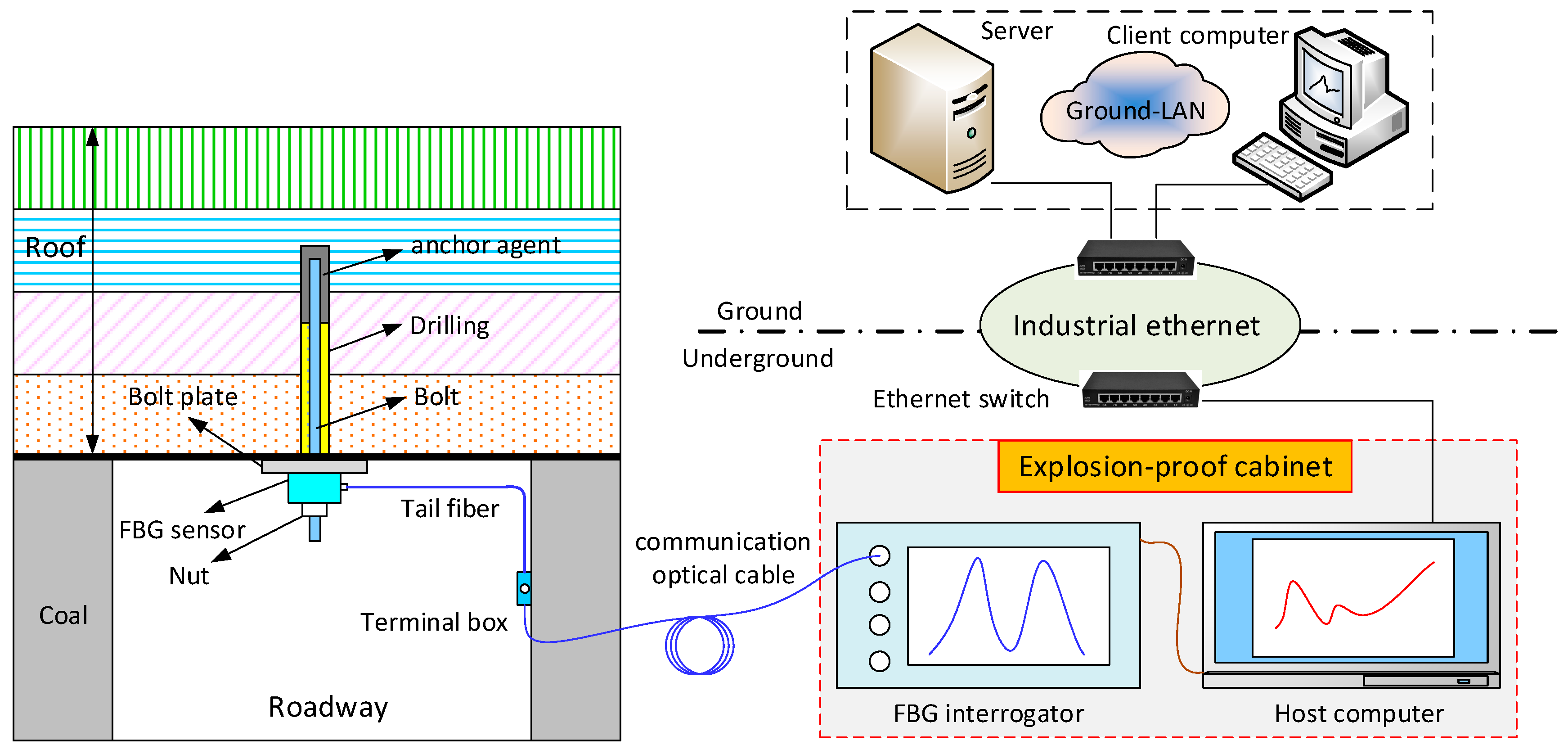
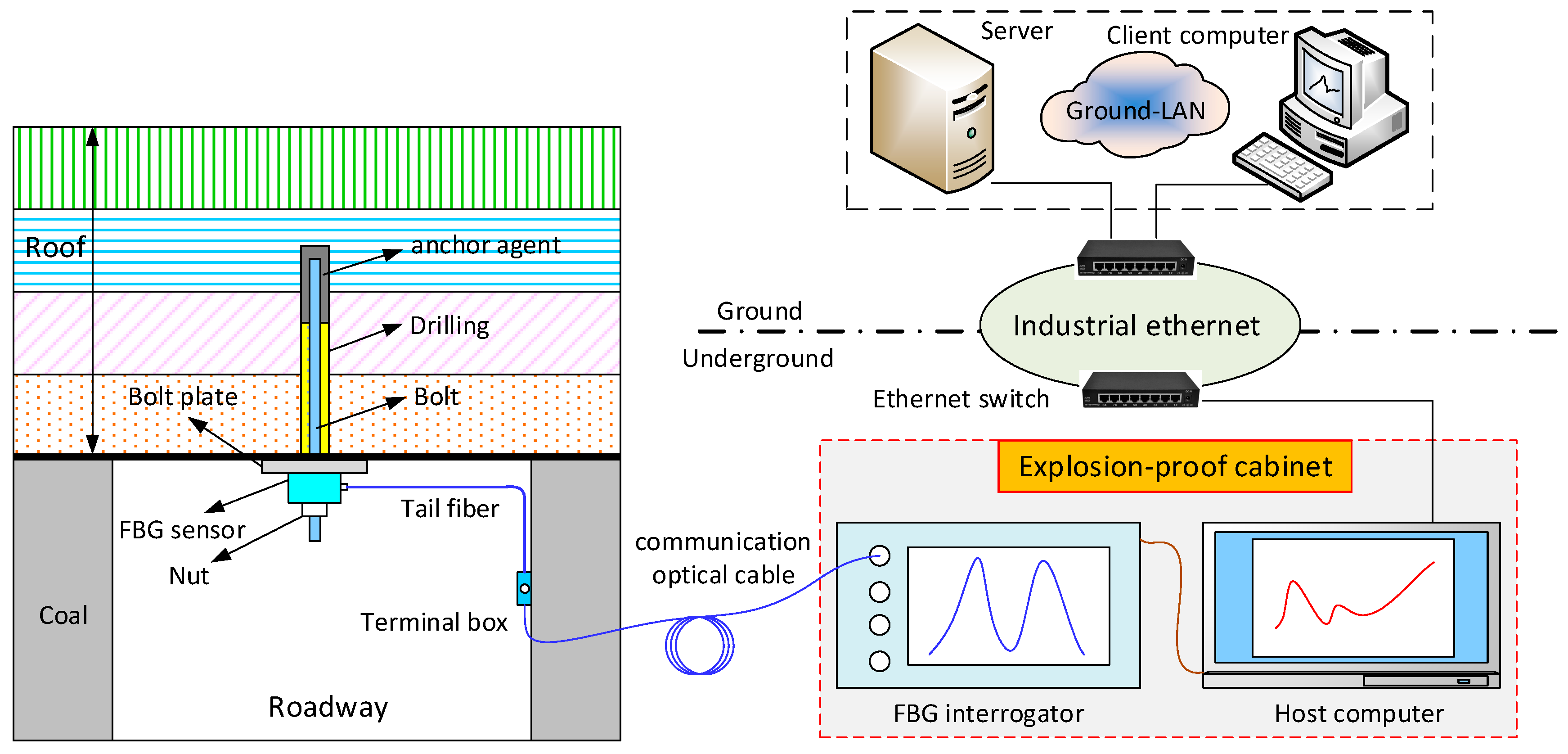
4.2. Arrangement of Roadway Bolt Support and Monitoring System
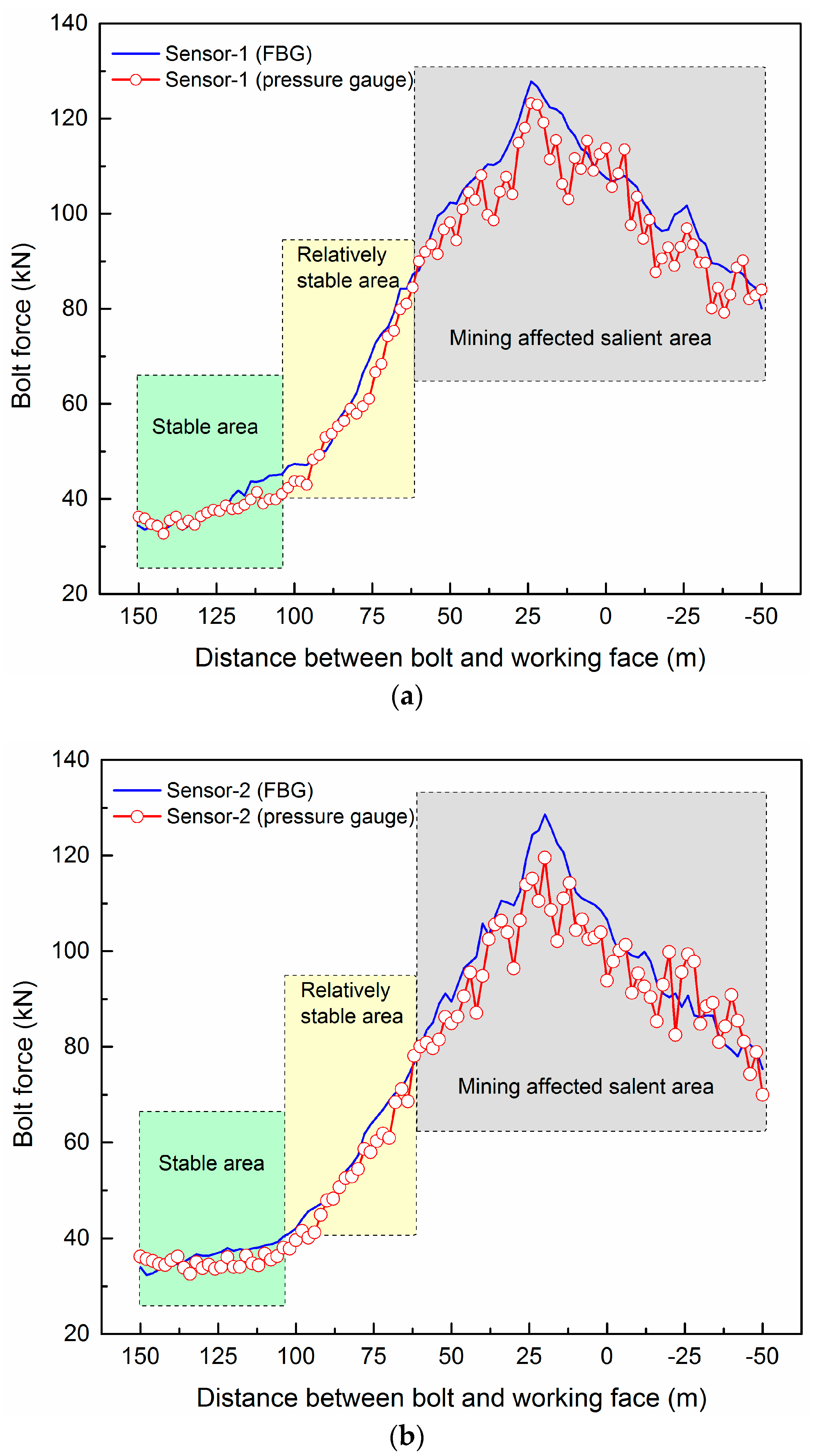
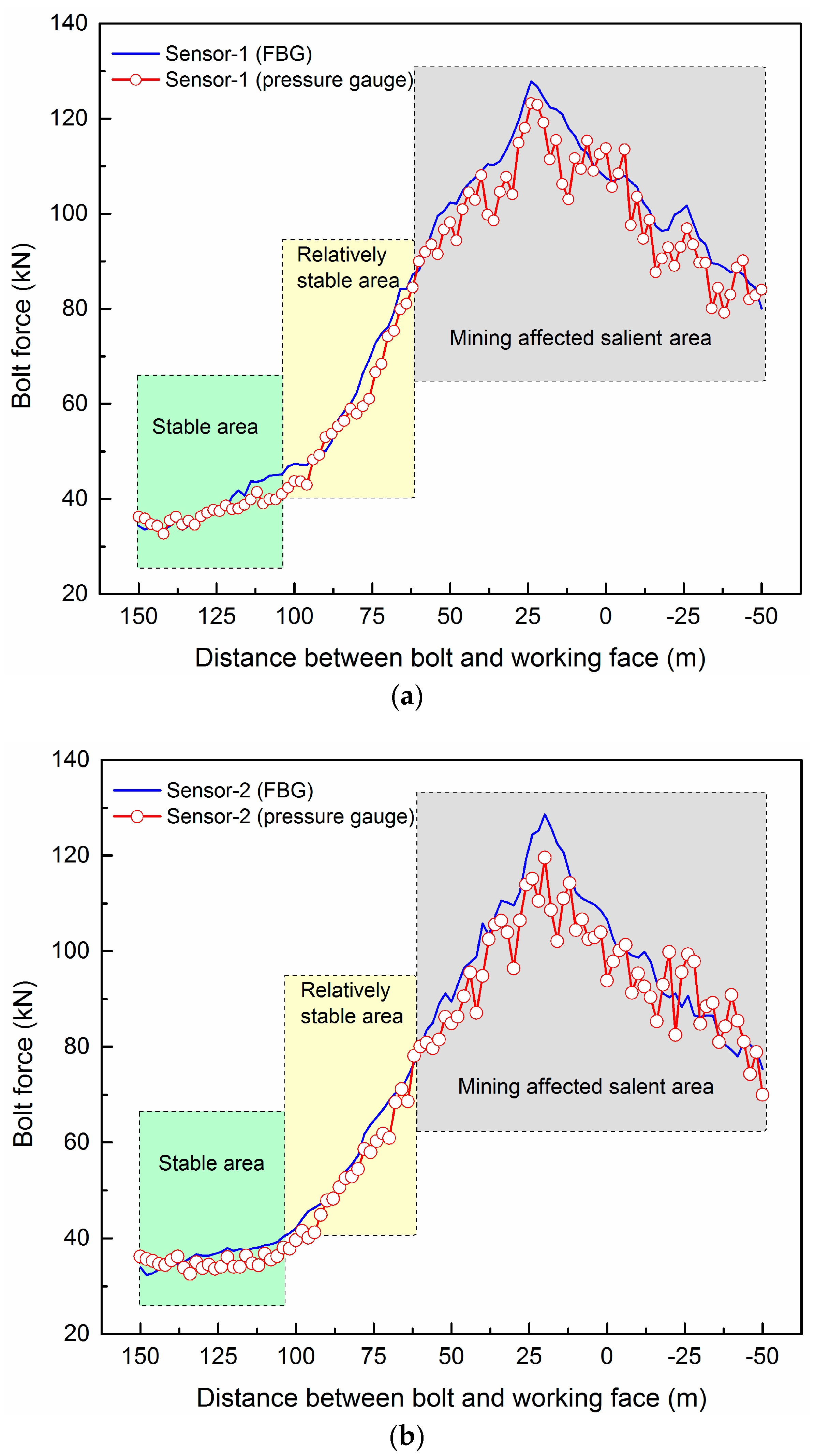
4.3. Analysis of Monitoring Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhao, Y.; Zhang, N.; Si, G. A fiber Bragg grating-based monitoring system for roof safety control in underground coal mining. Sensors 2016, 16, 1759. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Li, Z.Q.; Dong, Y. Design and experiments on a wide range fiber Bragg grating sensor for health monitoring of coal mines. Optik 2014, 125, 6287–6290. [Google Scholar] [CrossRef]
- Kang, H.P.; Wang, J.H.; Lin, J. Case studies of rock bolting in coal mine roadways. Chin. J. Rock Mech. Eng. 2010, 29, 649–664. [Google Scholar]
- Lee, B. Review of the present status of optical fiber sensors. Opt. Fiber Technol. 2003, 9, 57–59. [Google Scholar] [CrossRef]
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; Leblanc, M.; Koo, K.P. Fiber grating sensors. J. Lightwave Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef]
- Allwood, G.; Wild, G.; Lubansky, A.; Hinckley, S. A highly sensitive fiber Bragg grating diaphragm pressure transducer. Opt. Fiber Technol. 2015, 25, 25–32. [Google Scholar] [CrossRef]
- Pei, H.F.; Teng, J.; Yin, J.H.; Chen, R. A review of previous studies on the application of optical fiber sensor in geotechnical health monitoring. Measurement 2014, 58, 207–214. [Google Scholar] [CrossRef]
- Ho, Y.T.; Huang, A.B.; Lee, J.T. Development of a fibre Bragg grating sensored ground movement monitoring system. Meas. Sci. Technol. 2006, 17, 1733–1740. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y.; Sun, Y.; Gao, L.; Zhang, Z.; Zhang, W.; Zhao, P.; Yue, Y. Using custom fiber Bragg grating-based sensors to monitor artificial landslides. Sensors 2016, 16, 1417. [Google Scholar] [CrossRef] [PubMed]
- Torres, B.; Payá-Zaforteza, I.; Calderón, P.A.; Adam, J.M. Analysis of the strain transfer in a new FBG sensor for structural health monitoring. Eng. Struct. 2011, 33, 539–548. [Google Scholar] [CrossRef]
- Huang, M.; Zhou, Z.; Huang, Y.; Ou, J. A distributed self-sensing FRP anchor rod with built-in optical fiber sensor. Measurement 2013, 46, 1363–1370. [Google Scholar] [CrossRef]
- Wang, C.; Cheng, L. Use of fiber Bragg grating sensors for monitoring concrete structures with prestressed near-surface mounted carbon fiber-reinforced polymer strips. J. Intell. Mater. Syst. Struct. 2014, 25, 164–173. [Google Scholar] [CrossRef]
- Hu, D.; Guo, Y.; Chen, X.; Zhang, C. Cable force health monitoring of Tongwamen bridge based on fiber Bragg grating. Appl. Sci. 2017, 7, 384. [Google Scholar] [CrossRef]
- Waele, W.D.; Moerman, W.; Taerwe, L.; Degrieck, J.; Himpe, J. Measuring ground anchor forces of a quay wall with Bragg sensors. J. Struct. Eng. 2005, 131, 322–328. [Google Scholar]
- Huang, J.; Zhou, Z.; Zhang, D.; Tao, J.; Li, L.; Deng, X. Design and application of a fiber Bragg grating tension sensor for anchor rope. Adv. Mech. Eng. 2013, 995–1001. [Google Scholar] [CrossRef]
- Ye, X.W.; Ni, Y.Q.; Yin, J.H. Safety monitoring of railway tunnel construction using FBG sensing technology. Adv. Struct. Eng. 2013, 16, 1401–1409. [Google Scholar] [CrossRef]
- Lin, C.; Liu, Q.; Gao, W.; Xiao, C.X. Application of fiber optical sensing technology to monitoring axial forces of anchor bolts. Rock Soil Mech. 2008, 29, 3161–3164. [Google Scholar]
- Chai, J.; Wei, S.M.; Chang, X.T.; Liu, J.X. Monitoring deformation and damage on rock structures with distributed fiber optical sensing. Int. J. Rock Mech. Min. Sci. 2004, 41, 298–303. [Google Scholar] [CrossRef]
- Wang, J.; Liu, T.; Song, G.; Xie, H.; Li, L.; Deng, X.; Gong, Z. Fiber Bragg grating (FBG) sensors used in coal mines. Photonic Sens. 2014, 4, 120–124. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, J.C.; Zhang, P.S.; Shi, B. Internal strain monitoring for coal mining similarity model based on distributed fiber optical sensing. Measurement 2016, 97, 234–241. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, Y.H.; Gao, Y.K.; Ji, Y.C.; Huang, Z.A. Mechanism research and application on distributed optical fibre temperature measurement in coalmine goaf area based on the sensor network. Int. J. Sens. Netw. 2016, 20, 104–110. [Google Scholar] [CrossRef]
- Tao, S.; Dong, X.; Lai, B. Temperature-insensitive fiber Bragg grating displacement sensor based on a thin-wall ring. Opt. Commun. 2016, 372, 44–48. [Google Scholar] [CrossRef]
- He, J.; Zhou, Z.; Ou, J. Simultaneous measurement of strain and temperature using a hybrid local and distributed optical fiber sensing system. Measurement 2014, 47, 698–706. [Google Scholar] [CrossRef]
- Zhang, W.; Li, F.; Liu, Y. FBG pressure sensor based on the double shell cylinder with temperature compensation. Measurement 2009, 42, 408–411. [Google Scholar] [CrossRef]
- Feng, Z.; Wang, Q.; Shida, K. Design and implementation of a self-validating pressure sensor. IEEE Sens. J. 2009, 9, 207–218. [Google Scholar] [CrossRef]
- Rodriguez-Cobo, L.; Cobo, A.; Lopez-Higuera, J.M. Embedded compaction pressure sensor based on fiber Bragg gratings. Measurement 2015, 68, 257–261. [Google Scholar] [CrossRef]
- Zhao, Y.; Liao, Y.; Lai, S. Simulaneous measurement of down-hole high pressure and temperature with a bulk-modulus and FBG sensor. IEEE Photonic Technol. Lett. 2002, 14, 1584–1586. [Google Scholar] [CrossRef]
- Liang, M.F.; Fang, X.Q.; Wu, G.; Xue, G.Z.; Li, H.W. A fiber Bragg grating pressure sensor with temperature compensation based on diaphragm-cantilever structure. Optik 2017, 145, 503–512. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, Z.; Zhang, D.; Wei, Q. A fiber Bragg grating pressure sensor and its application to pipeline leakage detection. Adv. Mech. Eng. 2013, 2013, 1310–1313. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| R | outer radius of cylinder | 54 mm |
| r | inner radius of cylinder | 12 mm |
| R0 | radius of diaphragm | 6 mm |
| r0 | radius of dowel bar | 1 mm |
| t | thickness of diaphragm | 0.5 mm |
| h | thickness of cantilever beam | 1.2 mm |
| b | free end width of the cantilever beam | 2 mm |
| l | length of cantilever beam | 7.5 mm |
| E1 | Young’s modulus of diaphragm | 1.93 × 105 MPa |
| E2 | Young’s modulus of cantilever beam | 1.91 × 105 MPa |
| μ | Poisson’s ratio of diaphragm | 0.31 |
| ρ | density of diaphragm | 7.93 g/cm3 |
| Pe | effective photoelastic coefficient of the optical fiber | 0.22 |
| λFBG1 | initial wavelength of FBG1 | 1530.859 nm |
| λFBG2 | initial wavelength of FBG2 | 1537.568 nm |
| λFBG | equivalent wavelength of FBGs | 1530.859 nm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, M.; Fang, X. Application of Fiber Bragg Grating Sensing Technology for Bolt Force Status Monitoring in Roadways. Appl. Sci. 2018, 8, 107. https://doi.org/10.3390/app8010107
Liang M, Fang X. Application of Fiber Bragg Grating Sensing Technology for Bolt Force Status Monitoring in Roadways. Applied Sciences. 2018; 8(1):107. https://doi.org/10.3390/app8010107
Chicago/Turabian StyleLiang, Minfu, and Xinqiu Fang. 2018. "Application of Fiber Bragg Grating Sensing Technology for Bolt Force Status Monitoring in Roadways" Applied Sciences 8, no. 1: 107. https://doi.org/10.3390/app8010107
APA StyleLiang, M., & Fang, X. (2018). Application of Fiber Bragg Grating Sensing Technology for Bolt Force Status Monitoring in Roadways. Applied Sciences, 8(1), 107. https://doi.org/10.3390/app8010107