A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
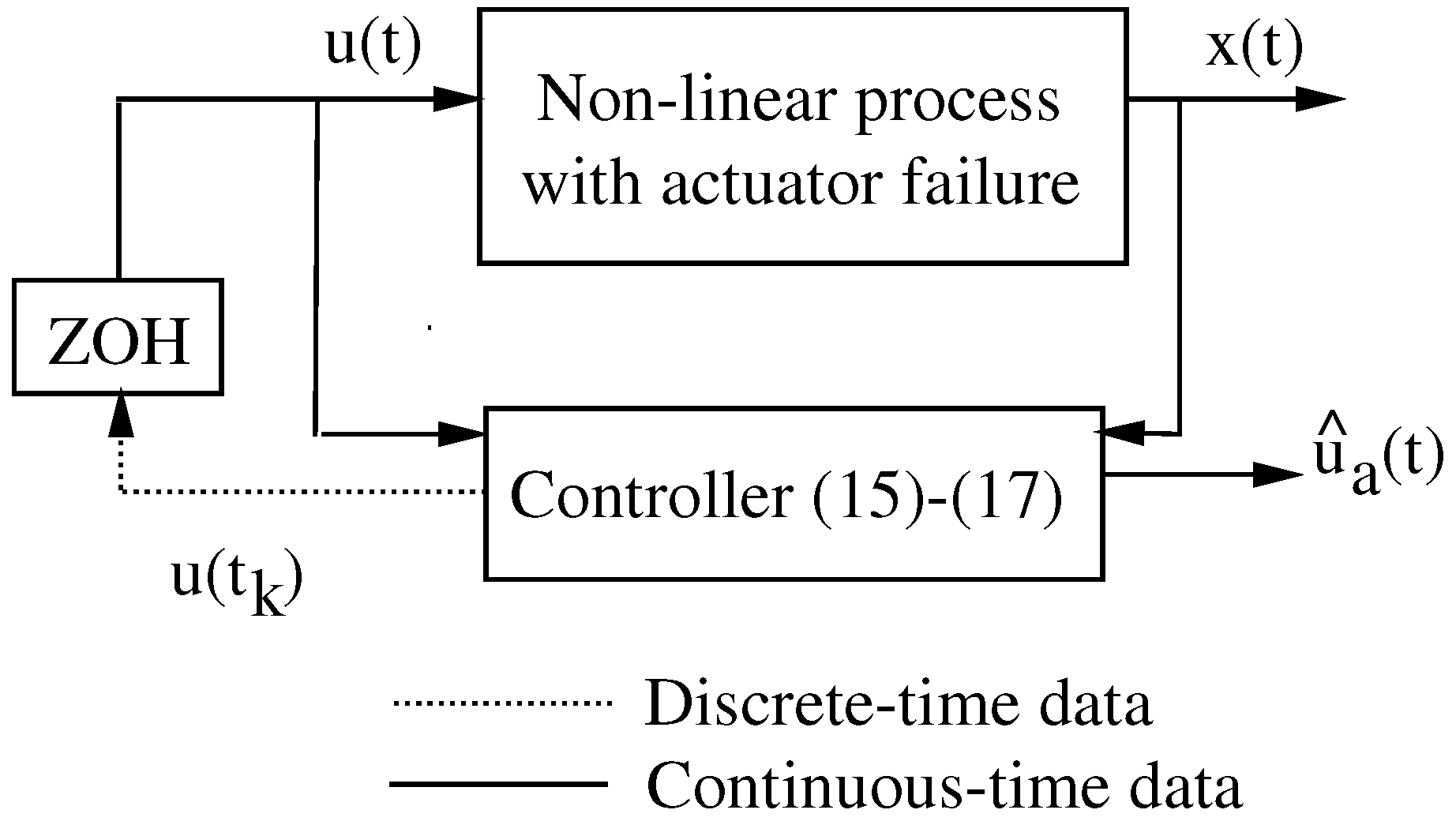
2. Actuator Fault Observer and Asynchronous Sampled-Data Control Designs
2.1. Disturbance Actuator Fault Observer
2.2. Event-Triggered Control Design
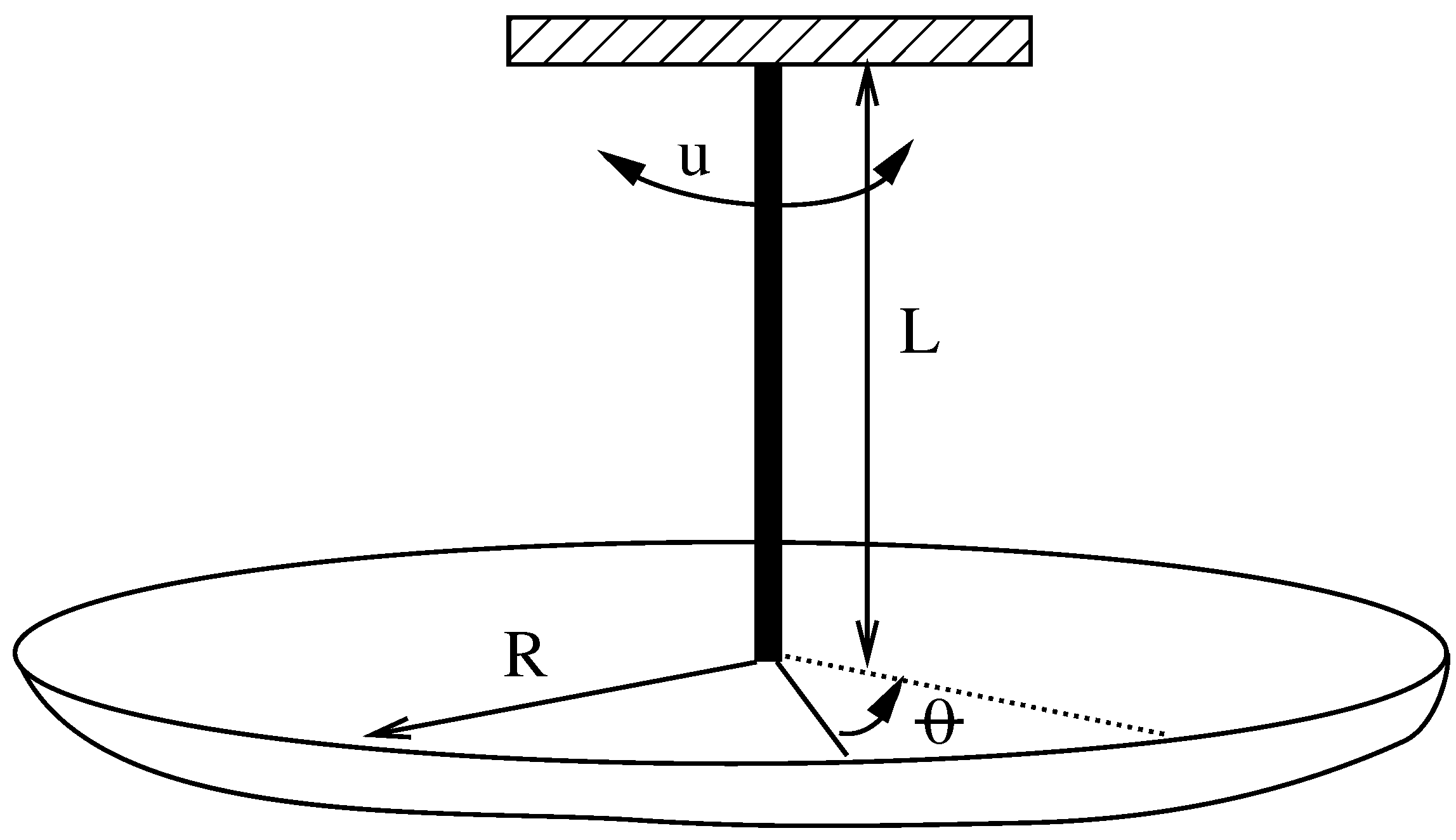
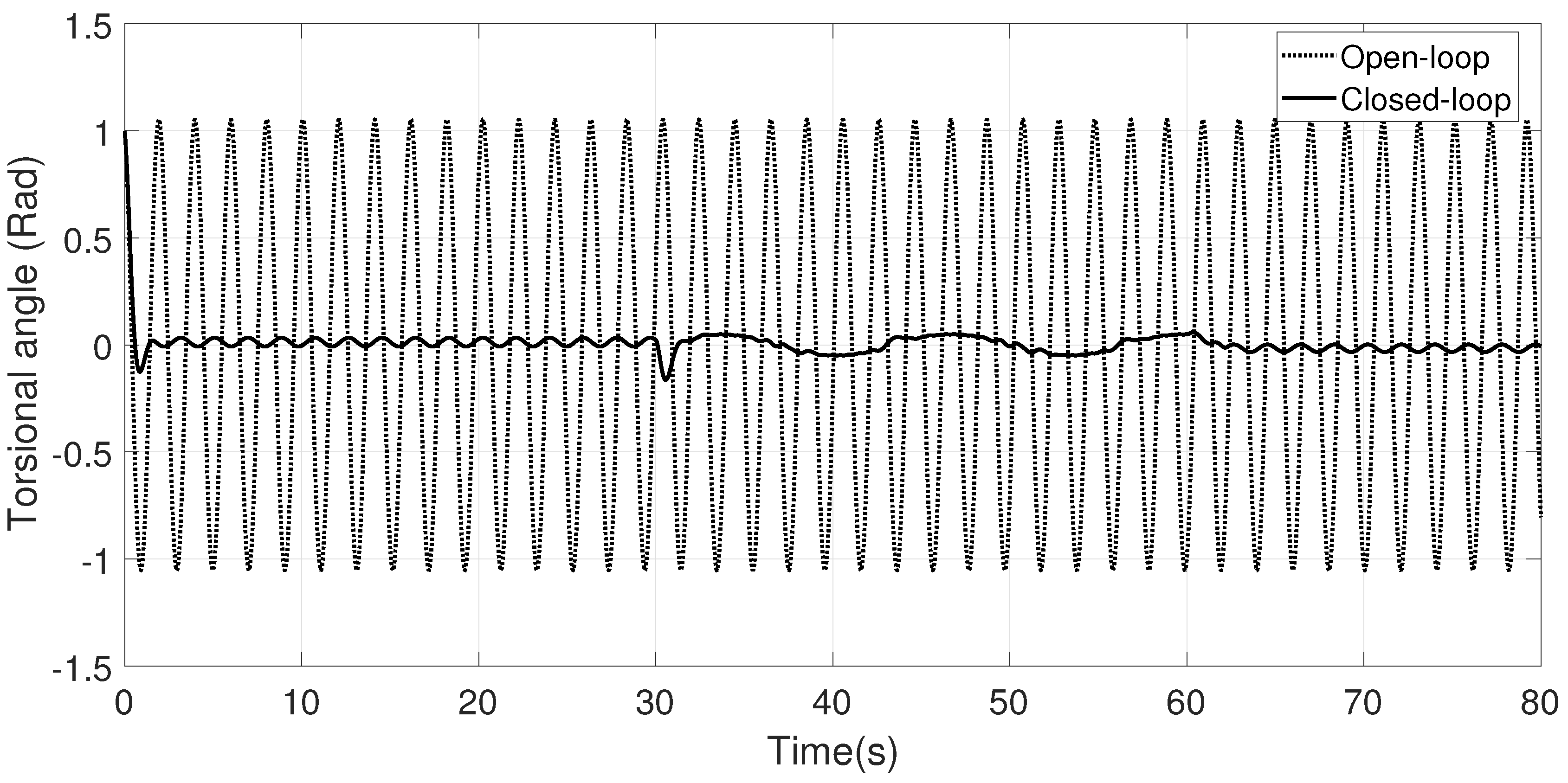
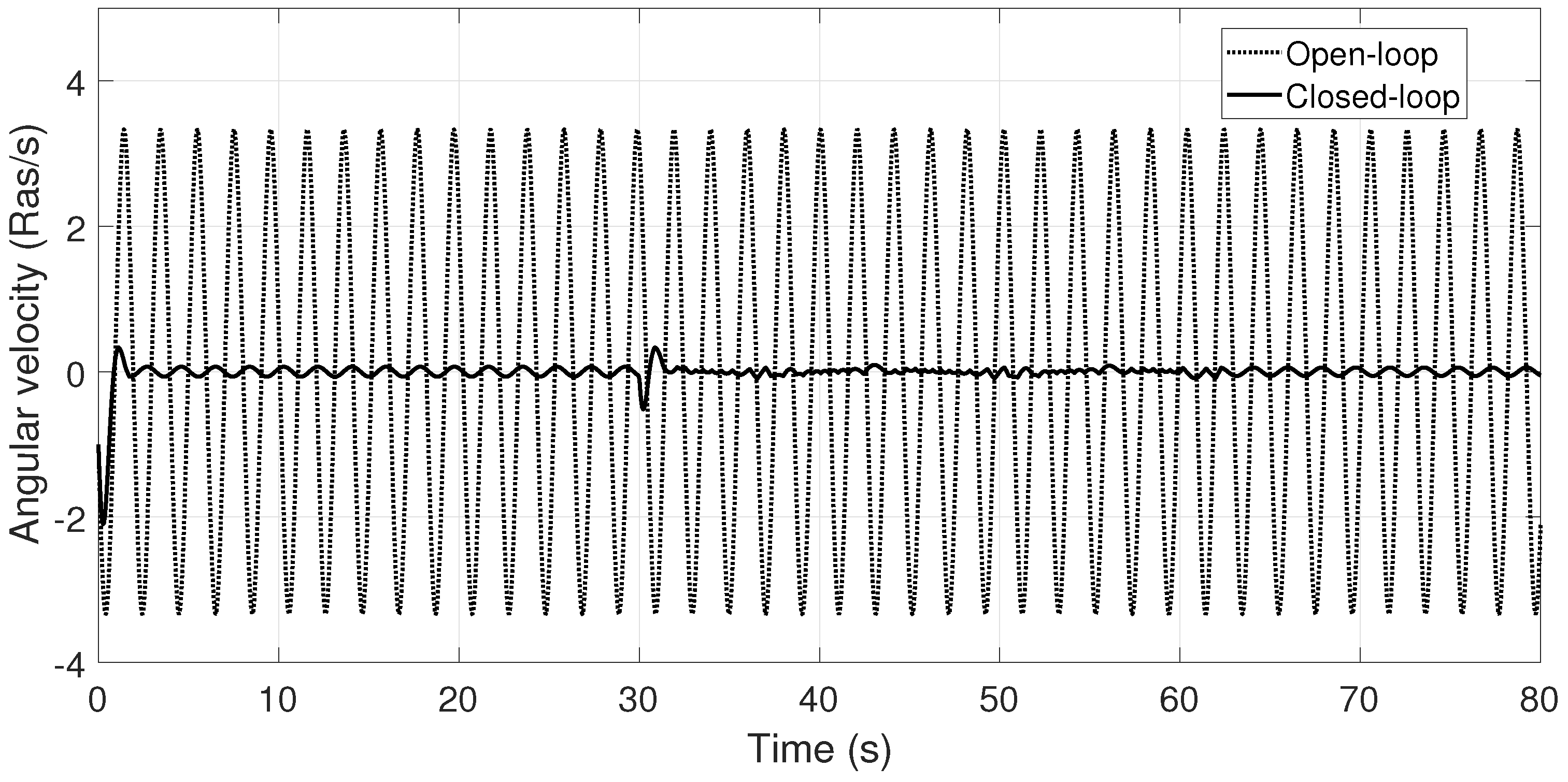
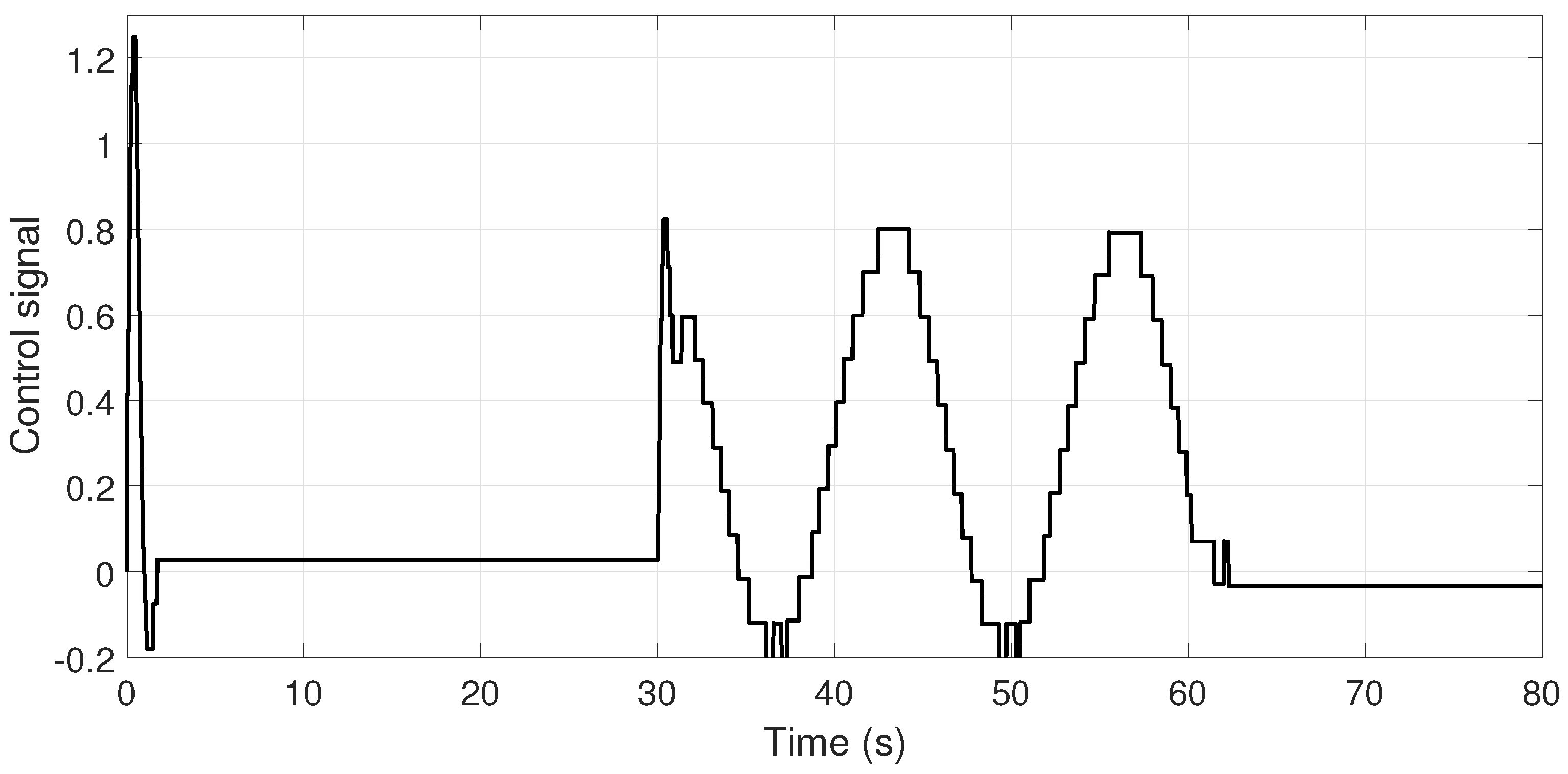
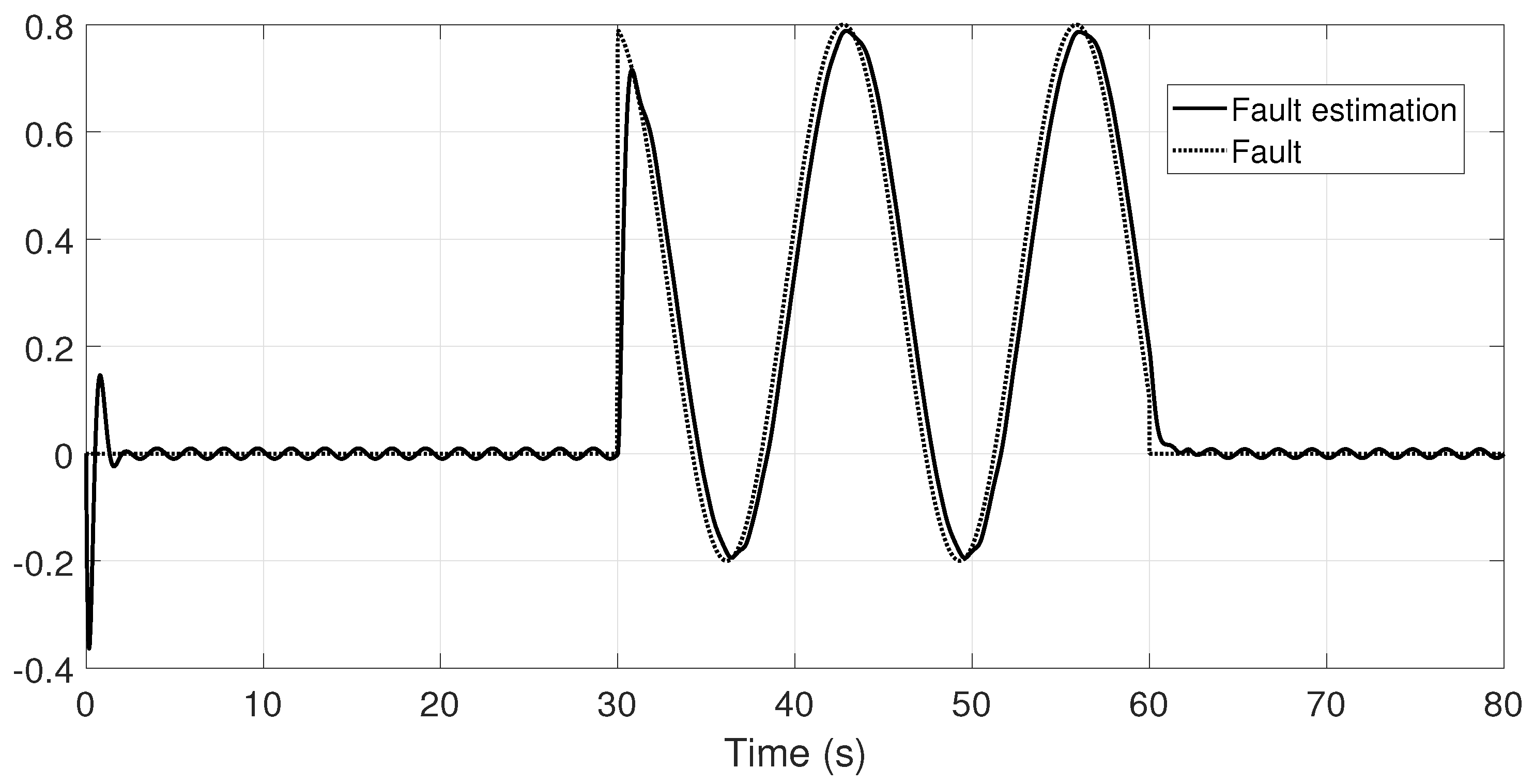
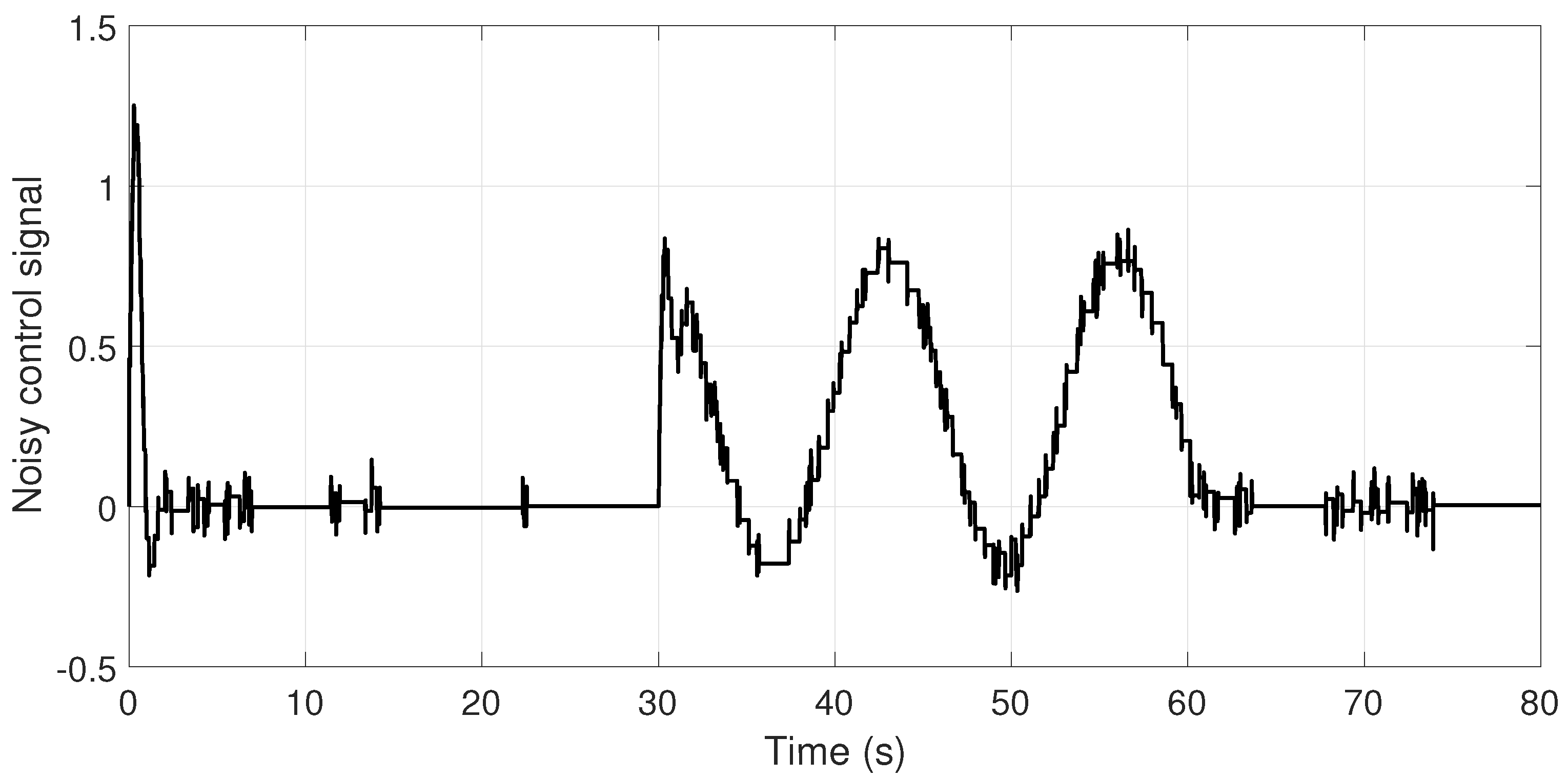
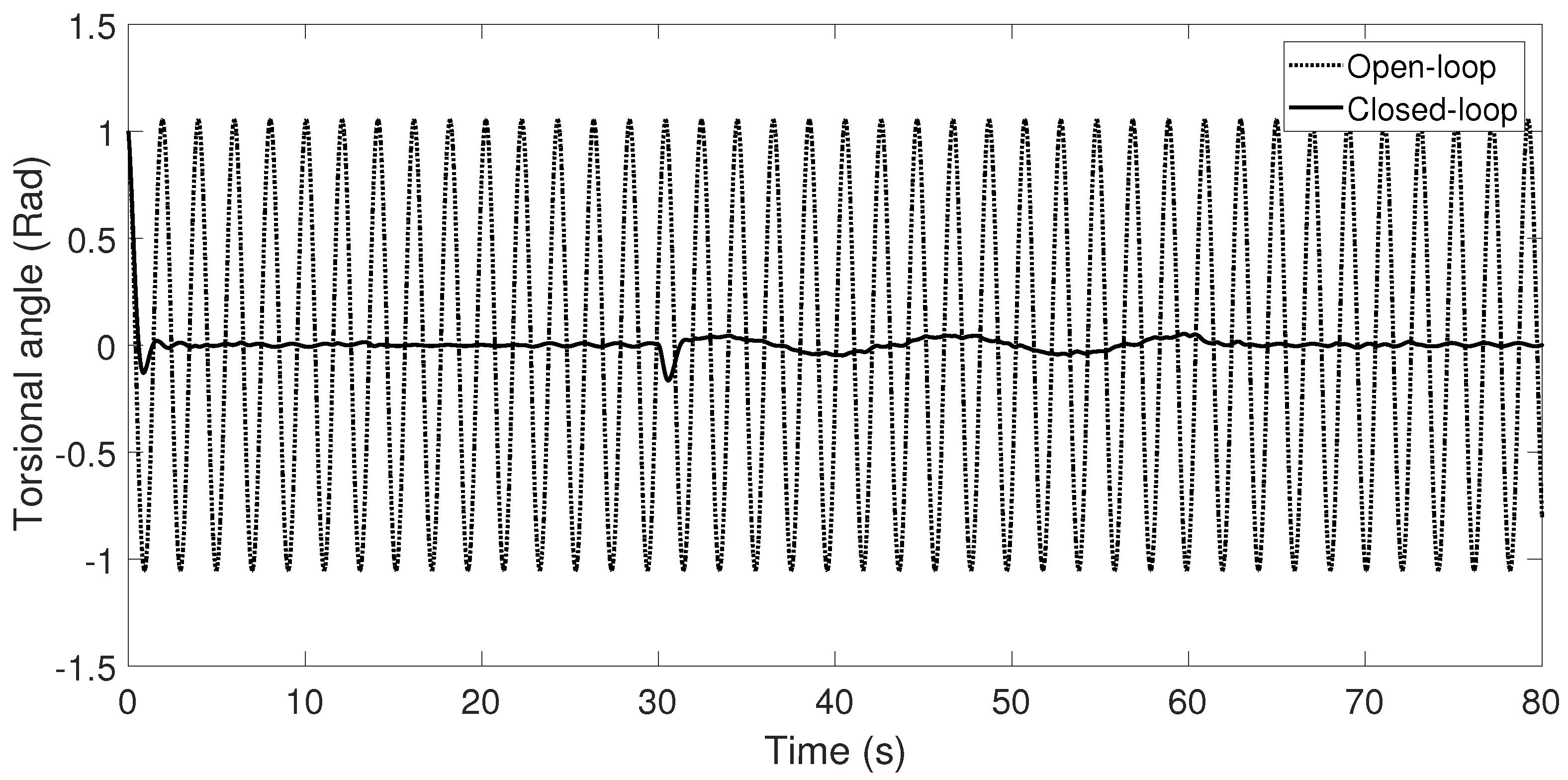
3. Numerical Experiments
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, J.; Feng, G. Event-driven observer-based output feedback control for linear systems. Automatica 2014, 50, 1852–1859. [Google Scholar] [CrossRef]
- Fan, Q.Y.; Yang, G.H. Sampled-data output feedback control based on a new event-triggered control scheme. Inf. Sci. 2017, 414, 306–318. [Google Scholar] [CrossRef]
- Yu, H.; Hao, F. Adaptive model-based event-triggered control for linear systems. In Proceedings of the IEEE 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6630–6635. [Google Scholar]
- Hu, S.; Yue, D. L2-Gain analysis of event-triggered networked control systems: A discontinuous Lyapunov functional approach. Int. J. Robust Nonlinear Control 2013, 23, 1277–1300. [Google Scholar] [CrossRef]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Naghshtabrizi, P.; Hespanha, J.P.; Teel, A.R. Exponential stability of impulsive systems with application to uncertain sampled-data systems. Syst. Control Lett. 2008, 57, 378–385. [Google Scholar] [CrossRef]
- Hu, L.S.; Cao, Y.Y.; Shao, H.H. Constrained robust sampled-data control for nonlinear uncertain systems. Int. J. Robust Nonlinear Control 2002, 12, 447–464. [Google Scholar] [CrossRef]
- Phillips, C.L.; Nagle, H.T. Digital Control System Analysis and Design; Prentice Hall Press: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Landau, I.D.; Zito, G. Digital Control Systems: Design, Identification and Implementation; Springer: Berlin, Germany, 2005. [Google Scholar]
- Briat, C. Linear Parameter-Varying and Time-Delay Systems. Analysis, Observation, Filtering & Control; Springer: Berlin/Heidelberg, Germany, 2014; Volume 3. [Google Scholar]
- Vamvoudakis, K.G. Event-Triggered Optimal Adaptive Control Algorithm for Continuous-Time Nonlinear Systems. IEEE/CAA J. Autom. Sin. 2014, 1, 282–293. [Google Scholar]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Jiang, Z.; Cui, B.; Wu, W.; Zhuang, B. Event-driven observer-based control for distributed parameter systems using mobile sensor and actuator. Comput. Math. Appl. 2016, 72, 2854–2864. [Google Scholar] [CrossRef]
- Ni, W.; Zhao, P.; Wang, X.; Wang, J. Event-triggered Control of Linear Systems with Saturated Inputs. Asian J. Control 2015, 17, 1196–1208. [Google Scholar] [CrossRef]
- Behera, A.K.; Bandyopadhyay, B. Self-triggering-based sliding-mode control for linear systems. IET Control Theory Appl. 2015, 9, 2541–2547. [Google Scholar] [CrossRef]
- Wei, B.; Xiao, F. Event-triggered control for synchronization of coupled harmonic oscillators. Syst. Control Lett. 2016, 97, 163–168. [Google Scholar] [CrossRef]
- Zhao, B.; Liu, D.; Li, Y. Observer based adaptive dynamic programming for fault tolerant control of a class of nonlinear systems. Inf. Sci. 2017, 384, 21–33. [Google Scholar] [CrossRef]
- Abbaspour, A.; Aboutalebi, P.; Yen, K.K.; Sargolzaei, A. Neural adaptive observer-based sensor and actuator fault detection in nonlinear systems: Application in UAV. ISA Trans. 2017, 67, 317–329. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Daley, S. Actuator fault diagnosis: An adaptive observer-based technique. IEEE Trans. Autom. Control 1996, 41, 1073–1078. [Google Scholar] [CrossRef]
- Viola, F.; Gallaire, F. The viscous torsional pendulum. J. Fluids Struct. 2017, 72, 25–37. [Google Scholar] [CrossRef]
- Orlov, Y.; Acho, L. Nonlinear H∞-control of time-varying systems: A unified distribution-based formalism for continuous and sampled-data measurement feedback design. IEEE Trans. Autom. Control 2001, 46, 638–643. [Google Scholar] [CrossRef]
- Vidal, Y.; Acho, L.; Luo, N.; Tutiven, C. Hardware in the loop wind turbine simulator for control system testing. In Wind Turbine Control and Monitoring; Luo, N., Vidal, Y., Acho, L., Eds.; Springer: Berlin, Germany, 2014; pp. 449–466. [Google Scholar]
- Luo, N.; Vidal, Y.; Acho, L. Wind Turbine Control and Monitoring; Luo, N., Vidal, Y., Acho, L., Eds.; Springer: Berlin, Germany, 2014. [Google Scholar]
- Vidal, Y.; Tutivén, C.; Rodellar, J.; Acho, L. Fault diagnosis and fault-tolerant control of wind turbines via a discrete time controller with a disturbance compensator. Energies 2015, 8, 4300–4316. [Google Scholar] [CrossRef]









© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acho, L.; Buenestado, P. A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures. Appl. Sci. 2017, 7, 875. https://doi.org/10.3390/app7090875
Acho L, Buenestado P. A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures. Applied Sciences. 2017; 7(9):875. https://doi.org/10.3390/app7090875
Chicago/Turabian StyleAcho, Leonardo, and Pablo Buenestado. 2017. "A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures" Applied Sciences 7, no. 9: 875. https://doi.org/10.3390/app7090875
APA StyleAcho, L., & Buenestado, P. (2017). A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures. Applied Sciences, 7(9), 875. https://doi.org/10.3390/app7090875