
Bio-Inspired PVDF-Based, Mouse Whisker Mimicking, Tactile Sensor


Abstract
:1. Introduction
2. Methods
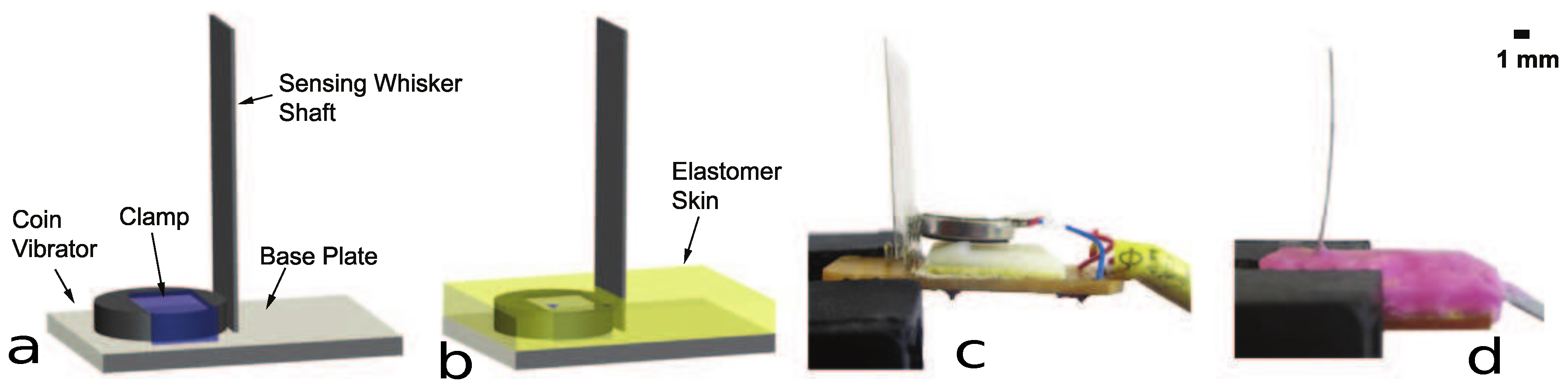
2.1. Design and Sensor Fabrication
Operation Principle
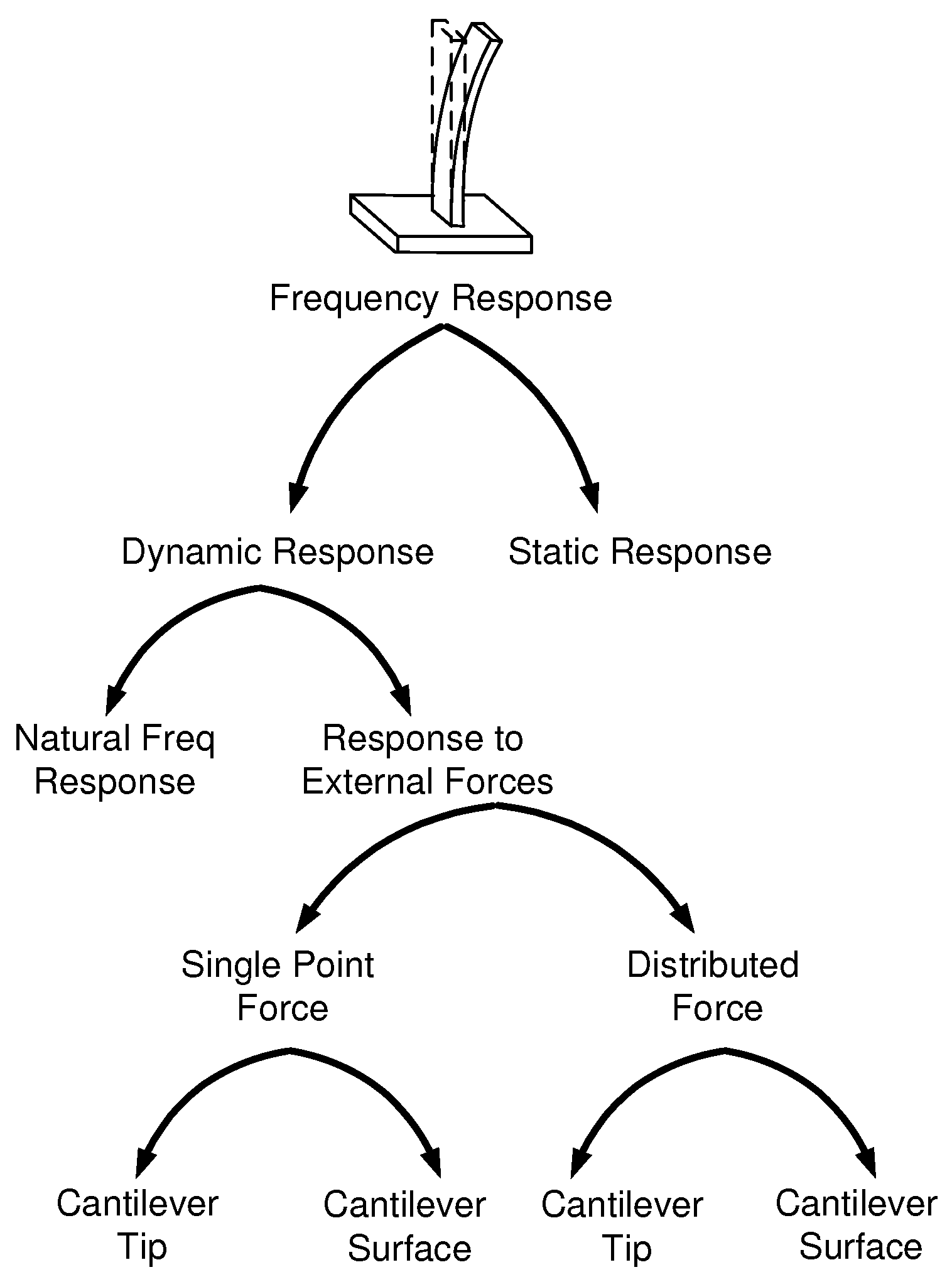
2.2. Sensor Modeling
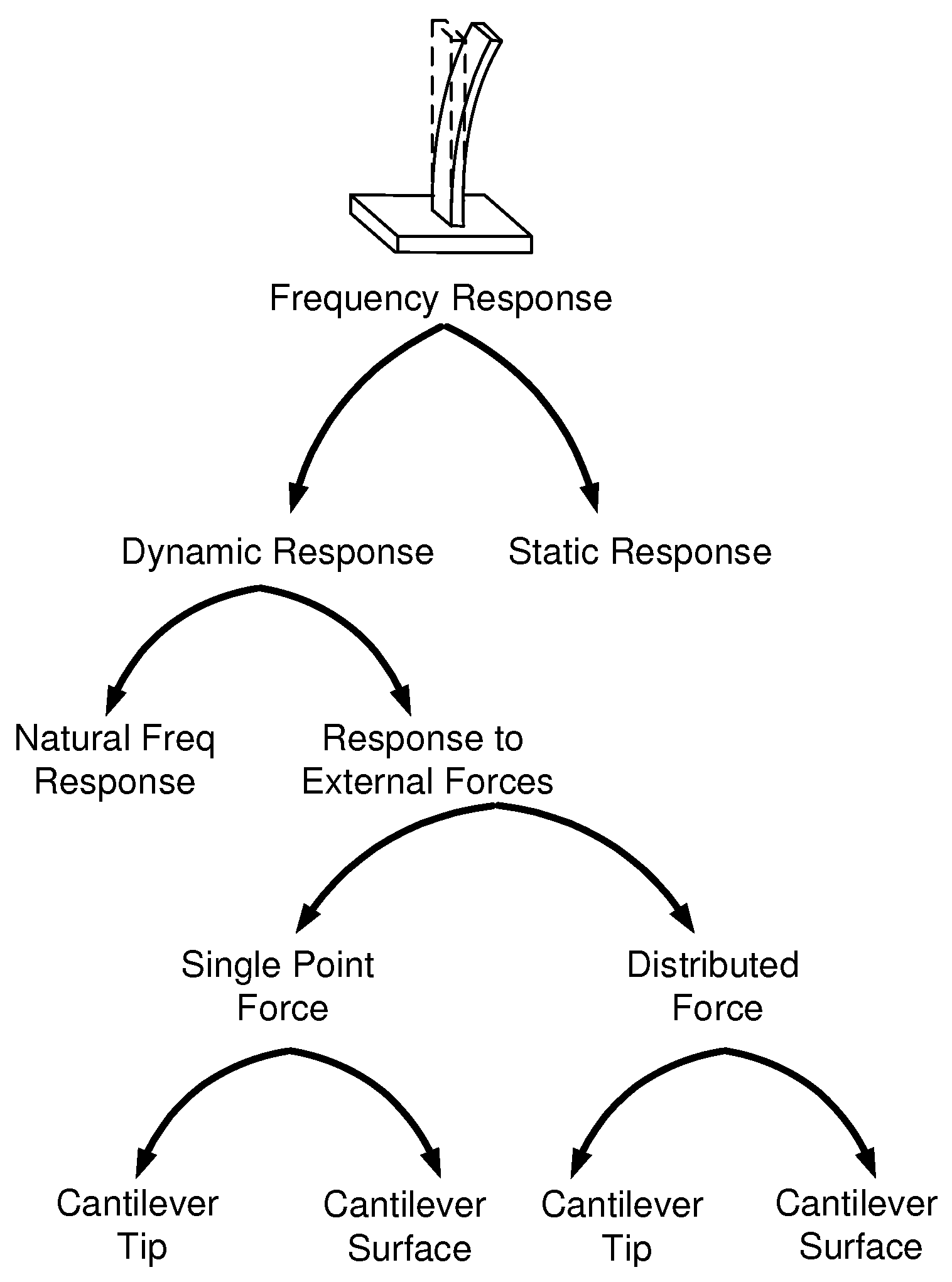
- Systems with low natural frequencies tend to have lower accuracy due to residual vibration after disturbance [36]. A sensor with higher natural frequency will come to its zero state quicker after the disturbance is removed, hence resulting in more accurate sensing.
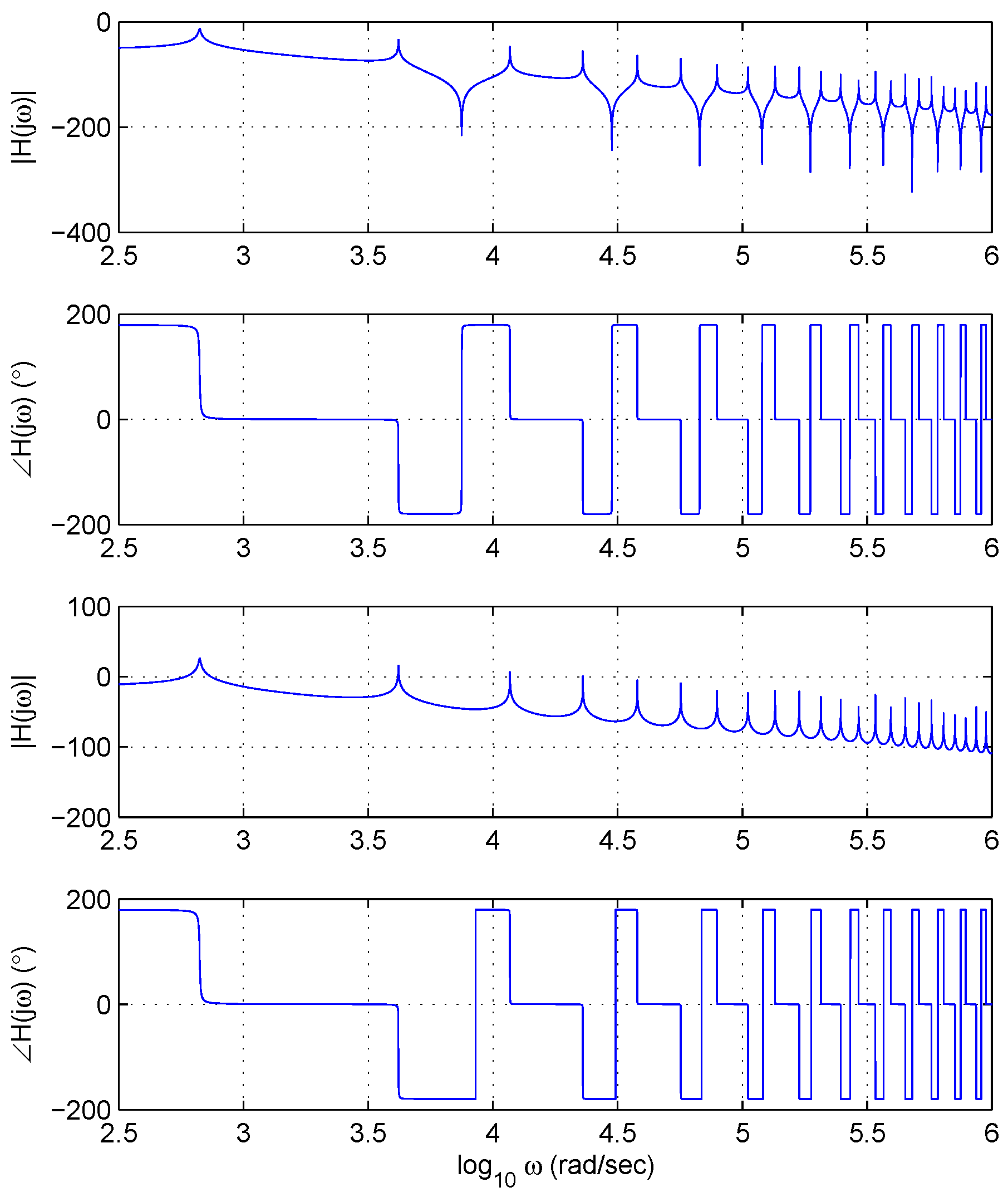
- If an external disturbance has a varying force amplitude but with frequency equal to the natural frequency of the sensor’s sensing element, the sensor’s sensing element will vibrate with larger amplitude. This phenomenon is also known as resonance [37].
- To have the first resonant frequency between 35 Hz and 110 Hz;
- Damping and loading force effects can be analysed;
- The results of models should be in agreement and also match experimental data;
- Effects that whisker shaft length can be determined for any required frequency;
- Effect of whisker material on frequency response can be analysed.
2.2.1. Analytical Model
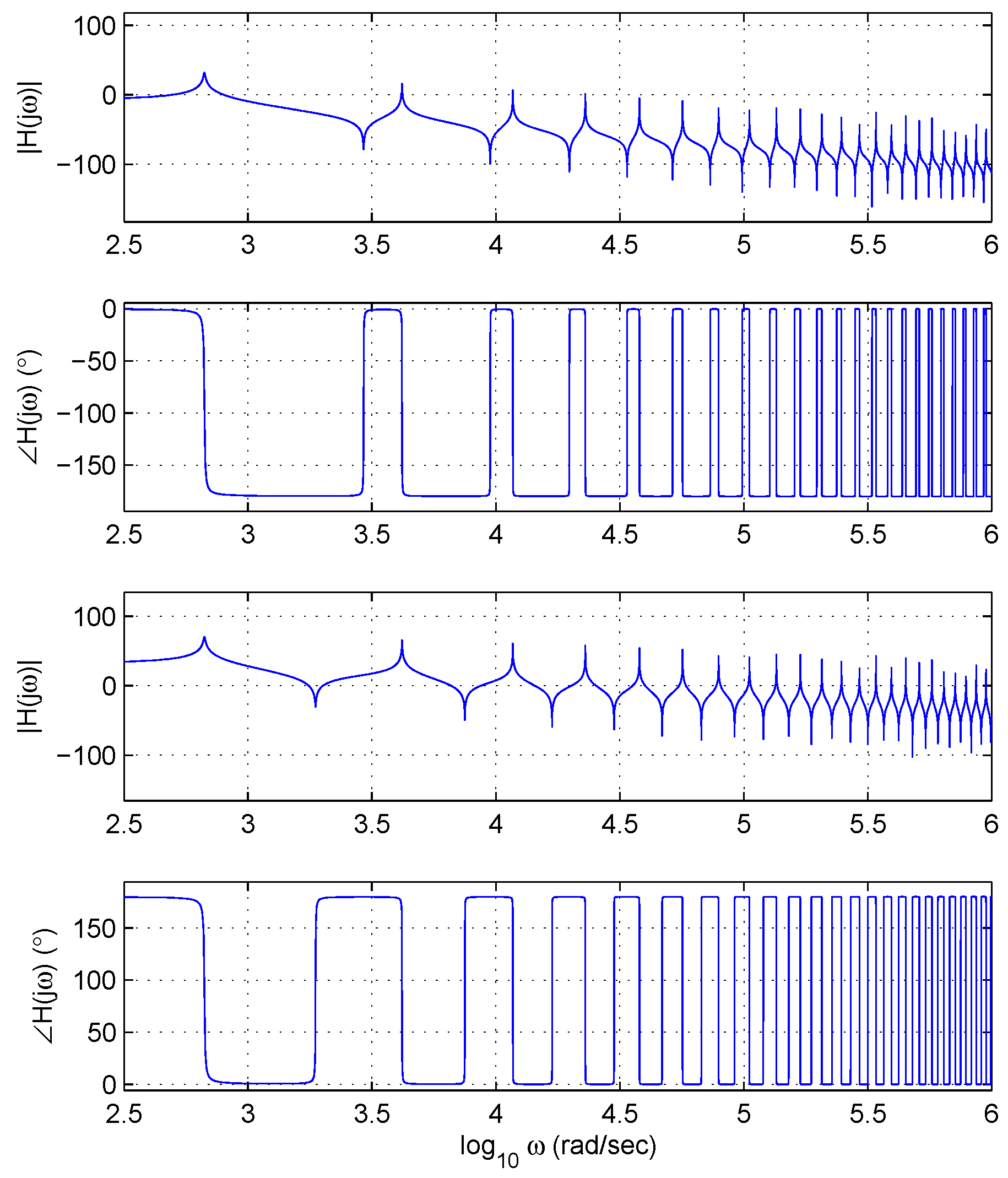
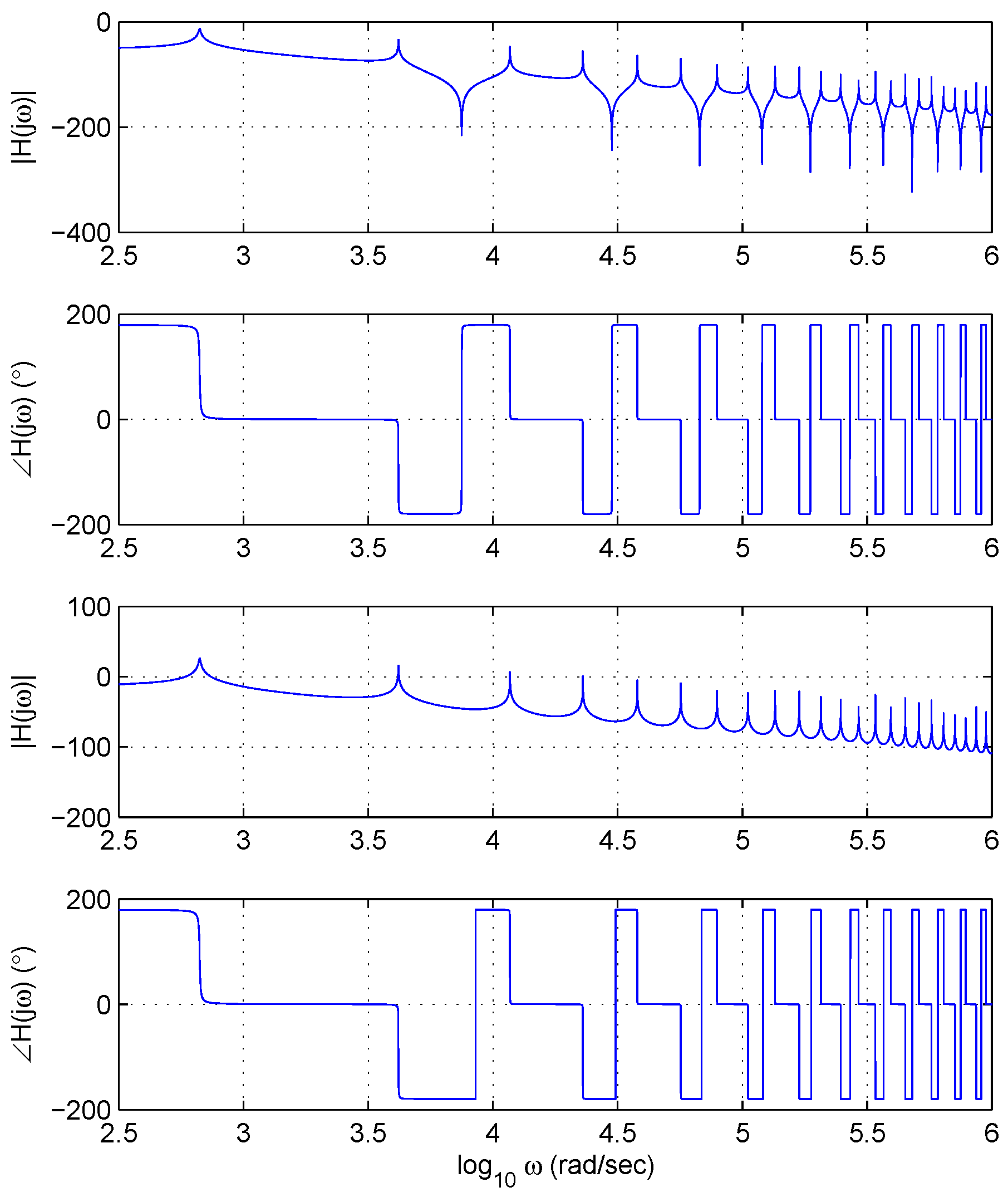
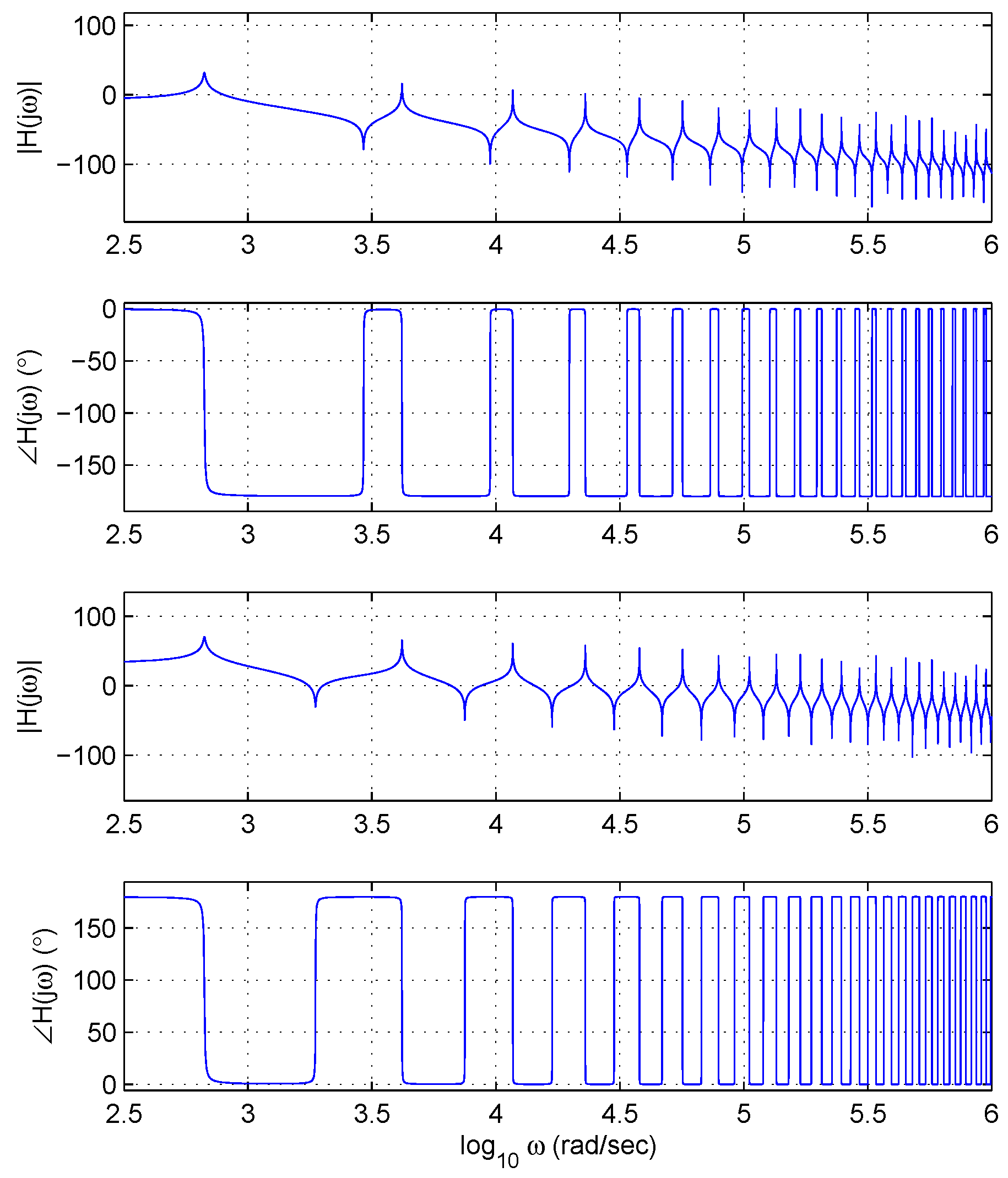
2.2.2. Transfer Function Based Analytical Model
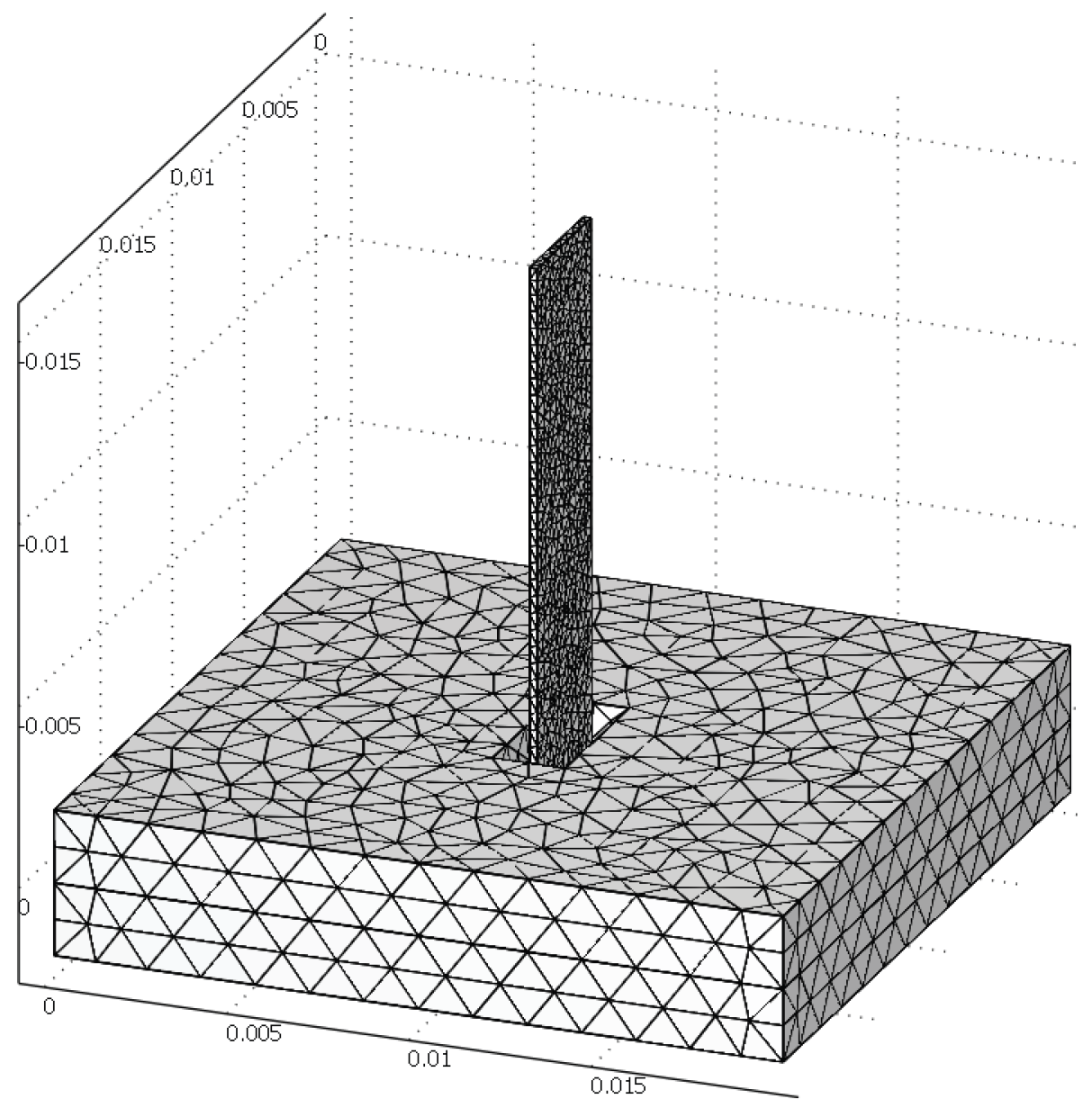
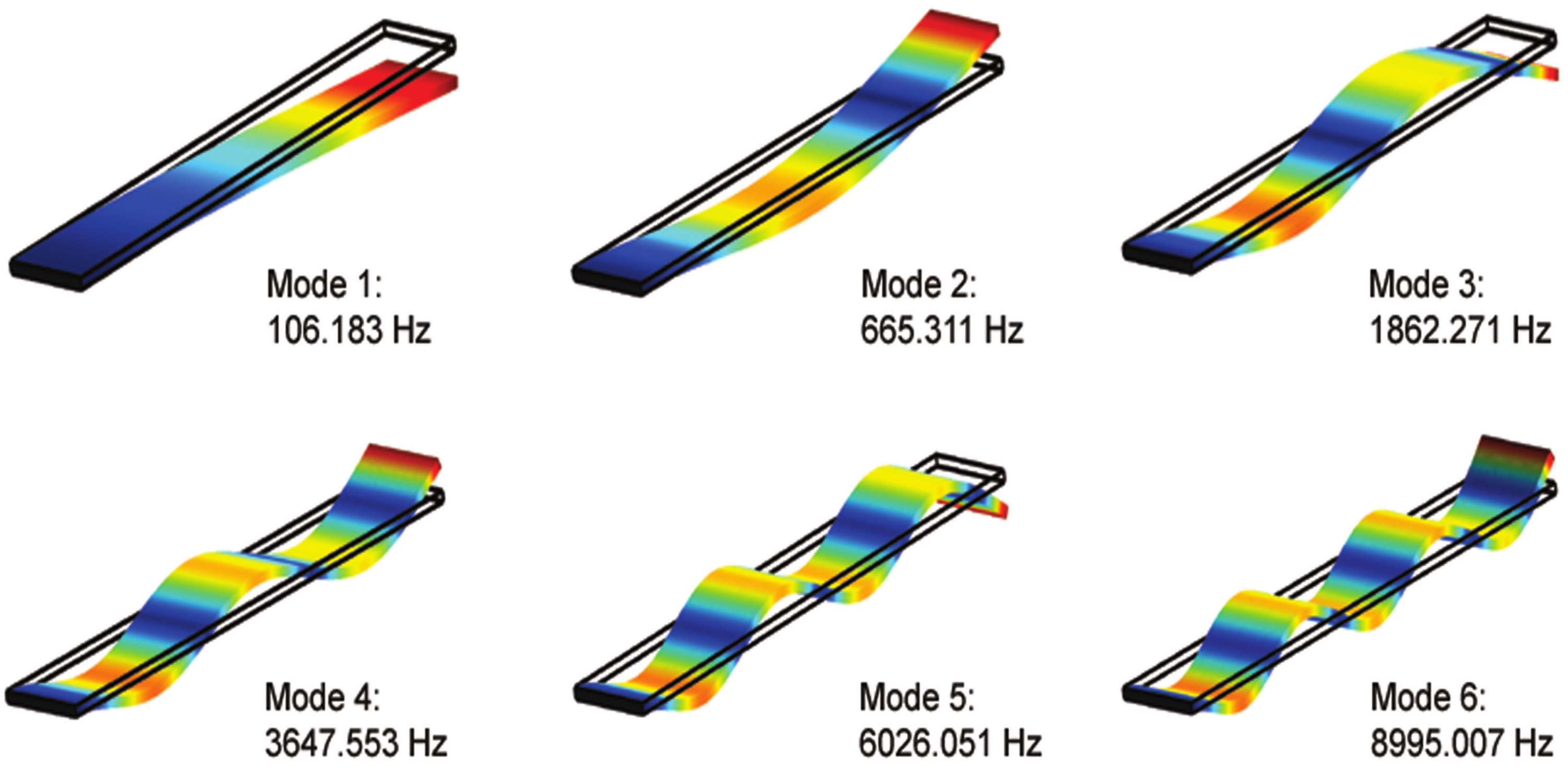
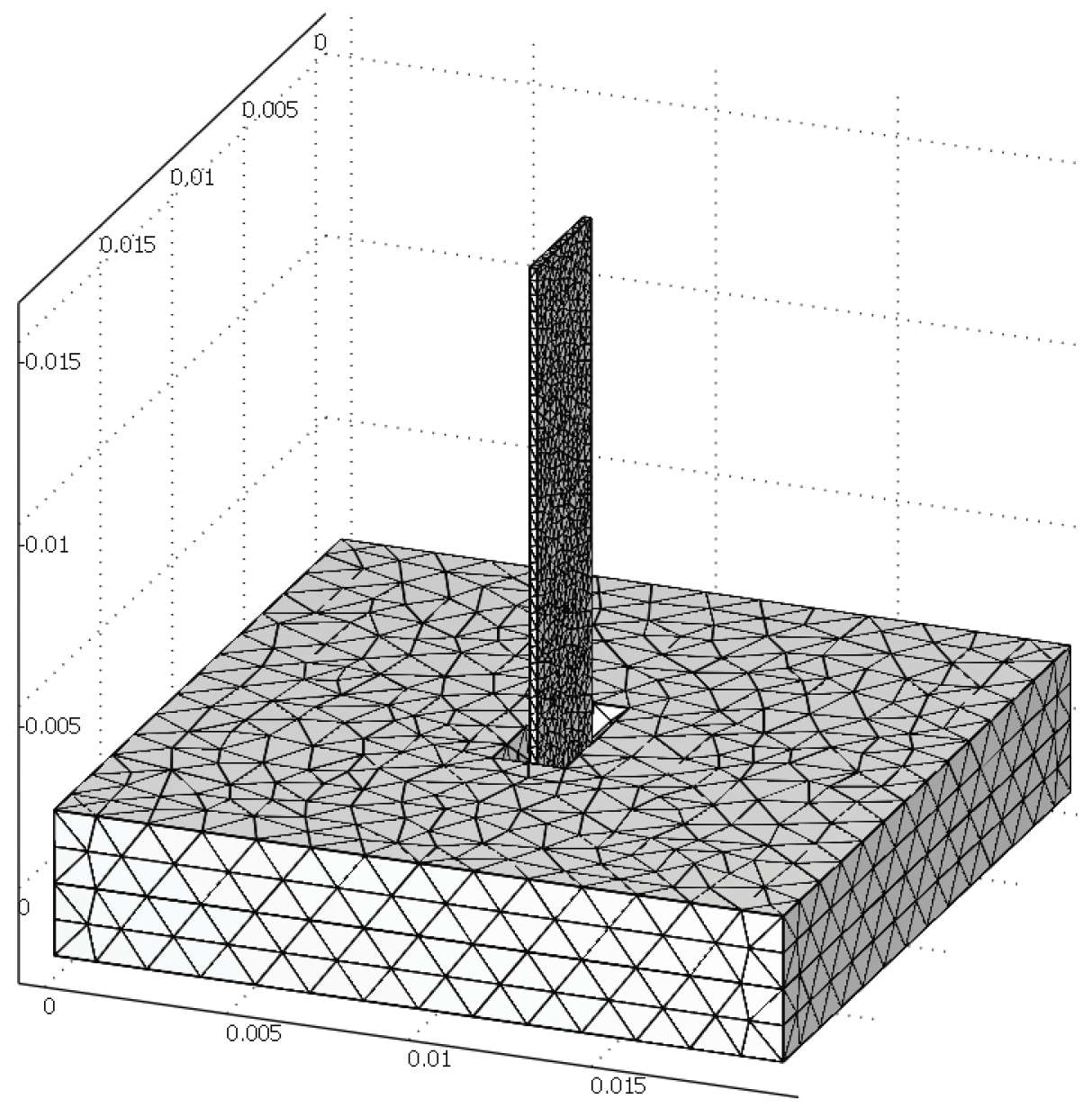
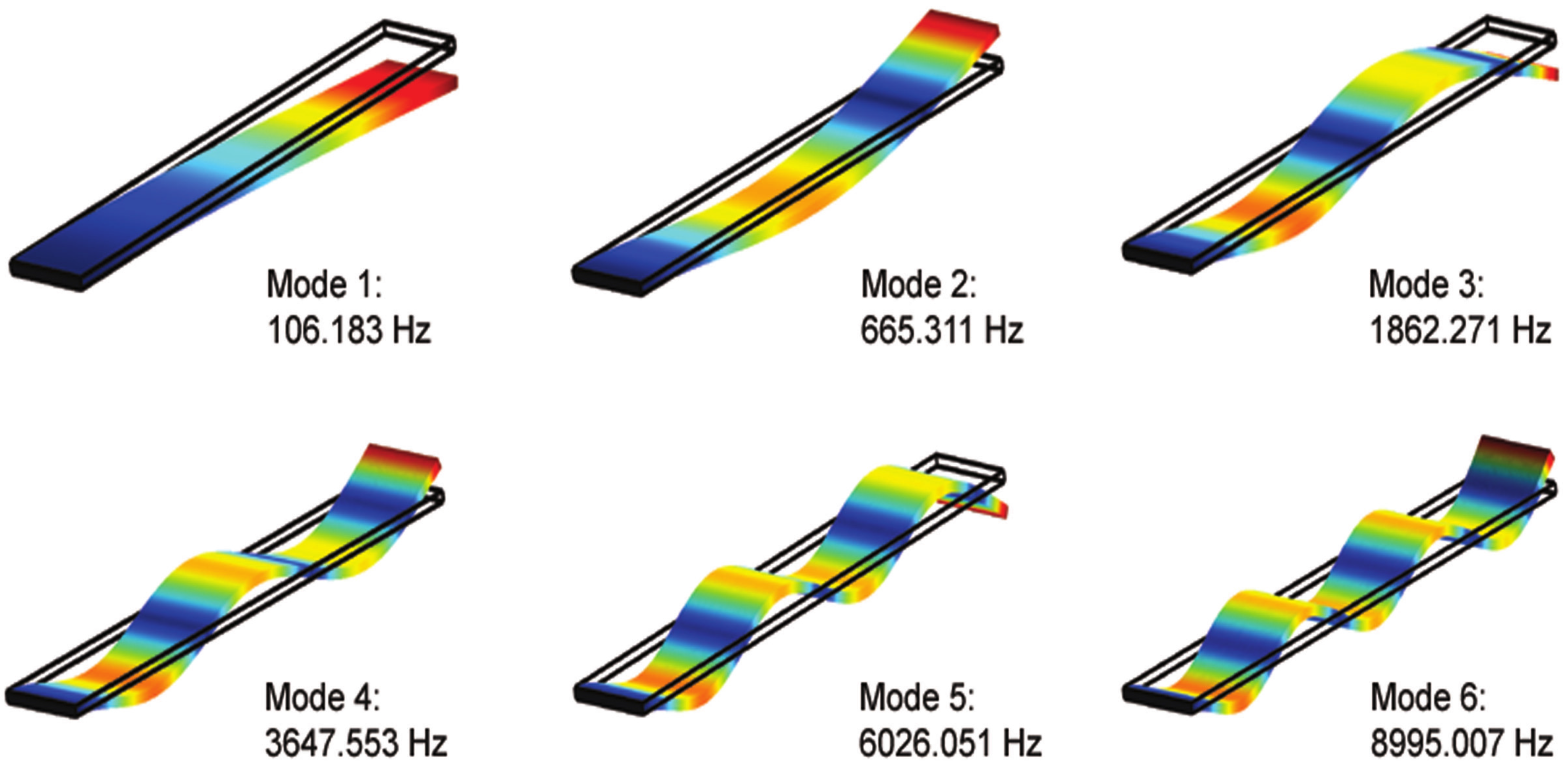
2.2.3. FEM 3D Model
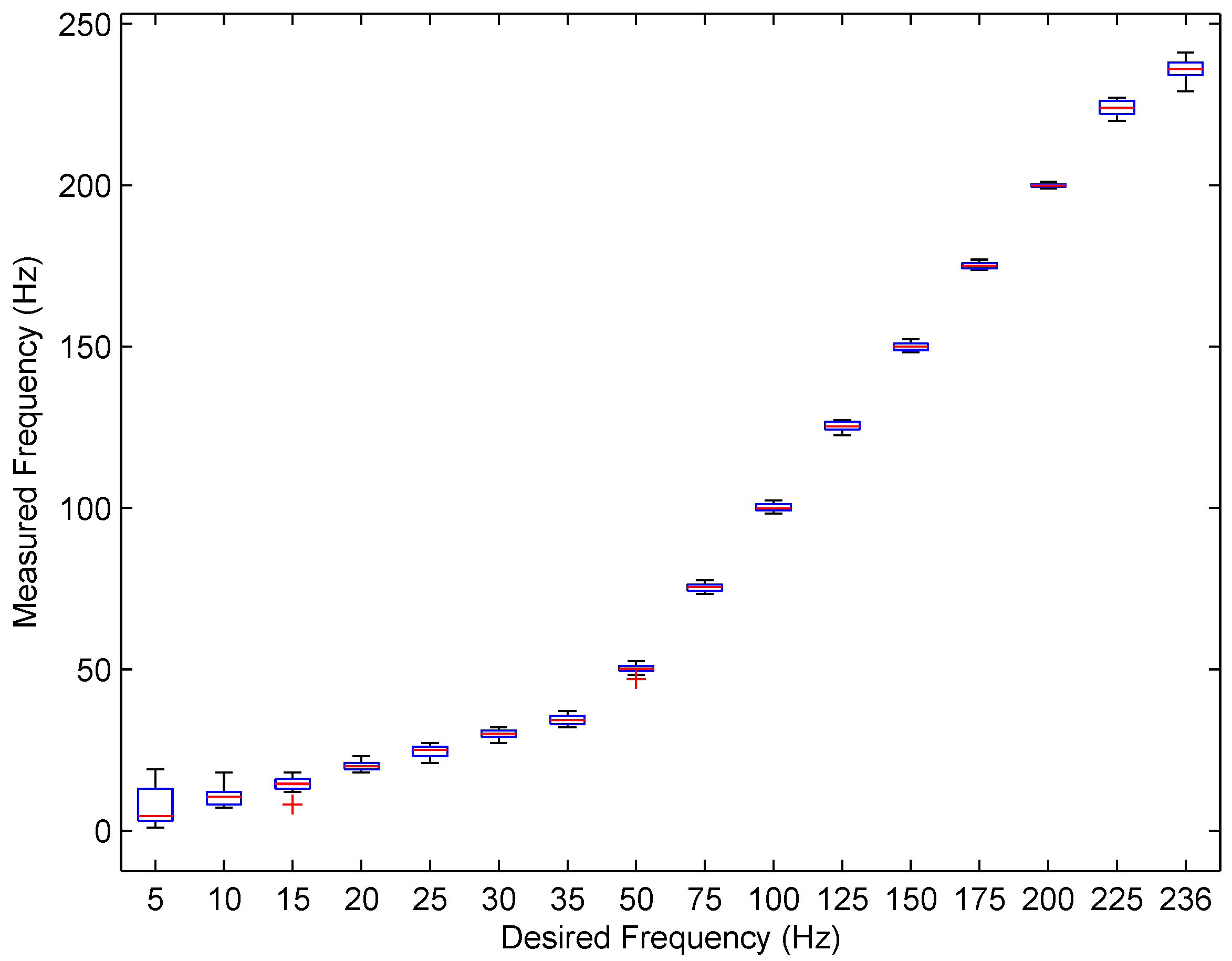
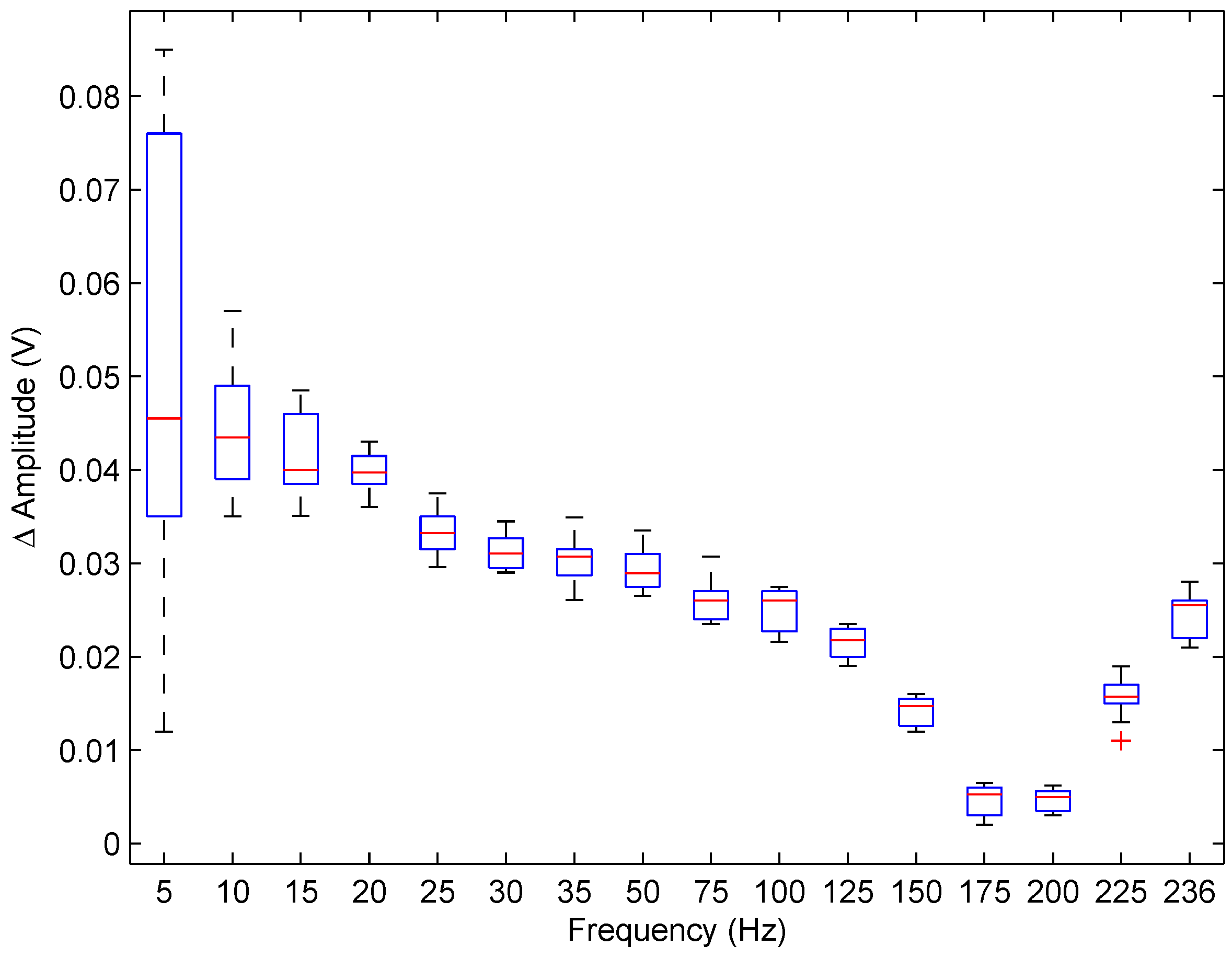
3. Results
4. Discussion
4.1. Advantages
4.2. Limitations
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Assaf, T.; Wilson, E.D.; Anderson, S.; Dean, P.; Porrill, J.; Pearson, M.J. Visual-tactile sensory map calibration of a biomimetic whiskered robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 967–972.
- Ahissar, E.; Shinde, N.; Haidarliu, S. Systems neuroscience of touch. In Scholarpedia of Touch; Springer: Berlin, Germany, 2016; pp. 401–405. [Google Scholar]
- Gordon, G. Models of tactile perception and development. In Scholarpedia of Touch; Springer: Berlin, Germany, 2016; pp. 797–808. [Google Scholar]
- Leyhausen, P. Cat Behavior; Garland: New York, NY, USA, 1979. [Google Scholar]
- Gopal, V.; Hartmann, M. Using hardware models to quantify sensory data acquisition across the rat vibrissal array. Bioinspir. Biomim. 2007, 2, S135–S145. [Google Scholar] [CrossRef] [PubMed]
- Welker, W. Analysis of sniffing of the albino rat. Behaviour 1964, 22, 223–244. [Google Scholar] [CrossRef]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Lottem, E.; Azouz, R. Dynamic translation of surface coarseness into whisker vibrations. J. Neurophysiol. 2008, 100, 2852–2865. [Google Scholar] [CrossRef] [PubMed]
- Wolfe, J.; Hill, D.; Pahlavan, S.; Drew, P.; Kleinfeld, D.; Feldman, D. Texture coding in the rat whisker system: Slip-stick versus differential resonance. PLoS Biol. 2008, 6. [Google Scholar] [CrossRef] [PubMed]
- Carvell, G.; Simons, D. Biometric analyses of vibrissal tactile discrimination in the rat. J. Neurosci. 1990, 10, 2638–2648. [Google Scholar] [PubMed]
- Harvey, A.; Roberto Bermejo, H.; Philip Zeigler, M. Discriminative whisking in the head-fixed rat: Optoelectronic monitoring during tactile detection and discrimination tasks. Somatosens. Mot. Res. 2001, 18, 211–222. [Google Scholar] [PubMed]
- Albarracín, A.; Farfán, F.; Felice, C.; Décima, E. Texture discrimination and multi-unit recording in the rat vibrissal nerve. BMC Neurosci. 2006, 7. [Google Scholar] [CrossRef] [PubMed]
- Diamond, M.; von Heimendahl, M.; Knutsen, P.; Kleinfeld, D.; Ahissar, E. ‘Where’ and ‘what’ in the whisker sensorimotor system. Nat. Rev. Neurosci. 2008, 9, 601–612. [Google Scholar] [CrossRef] [PubMed]
- Durig, F.; Albarracin, A.L.; Farfan, F.D.; Felice, C.J. Design and construction of a photoresistive sensor for monitoring the rat vibrissal displacement. J. Neurosci. Methods 2009, 180, 71–76. [Google Scholar] [CrossRef] [PubMed]
- Wineski, L. Facial morphology and vibrissal movement in the golden hamster. J. Morphol. 1985, 183, 199–217. [Google Scholar] [CrossRef] [PubMed]
- Semba, K.; Komisaruk, B. Neural substrates of two different rhythmical vibrissal movements in the rat. Neuroscience 1984, 12, 761–774. [Google Scholar] [CrossRef]
- Bermejo, R.; Houben, D.; Zeigler, H. Optoelectronic monitoring of individual whisker movements in rats. J. Neurosci. Methods 1998, 83, 89–96. [Google Scholar] [CrossRef]
- Berg, R.; Kleinfeld, D. Rhythmic whisking by rat: retraction as well as protraction of the vibrissae is under active muscular control. J. Neurophysiol. 2003, 89, 104–117. [Google Scholar] [CrossRef] [PubMed]
- Bermejo, R.; Vyas, A.; Zeigler, H. Topography of rodent whisking–I. Two-dimensional monitoring of whisker movements. Somatosens. Mot. Res. 2002, 19, 341–346. [Google Scholar] [CrossRef] [PubMed]
- Sachdev, R.; Sellien, H.; Ebner, F. Temporal organization of multi-whisker contact in rats. Somatosens. Mot. Res. 2001, 18, 91–100. [Google Scholar] [PubMed]
- Ebara, S.; Kumamoto, K.; Matsuura, T.; Mazurkiewicz, J.; Rice, F. Similarities and differences in the innervation of mystacial vibrissal follicle-sinus complexes in the rat and cat: a confocal microscopic study. J. Comp. Neurol. 2002, 449, 103–119. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Moller, R. Biomimetic whiskers for shape recognition. Robot. Auton. Syst. 2007, 55, 229–243. [Google Scholar] [CrossRef]
- Fend, M.; Bovet, S.; Yokoi, H.; Pfeifer, R. An active artificial whisker array for texture discrimination. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; Volume 2, pp. 1044–1049.
- Fend, M. Whisker-based texture discrimination on a mobile robot. In Advances in Artificial Life; Springer: Berlin, Germany, 2005; pp. 302–311. [Google Scholar]
- Lungarella, M.; Hafner, V.; Pfeifer, R.; Yokoi, H. An artificial whisker sensor for robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 3, pp. 2931–2936.
- Yokoi, H.; Fend, M.; Pfeifer, R. Development of a whisker sensor system and simulation of active whisking for agent navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan, 28 September–2 October 2004; Volume 1, pp. 607–612.
- Wijaya, J.; Russell, R. Object exploration using whisker sensors. In Proceedings of the Australasian Conference on Robotics and Automation, Auckland, New Zealand, 27–29 November 2002.
- Bertetto, A.; Ruggiu, M. Low cost resistive based touch sensor. Mech. Res. Commun. 2003, 30, 101–107. [Google Scholar] [CrossRef]
- Schultz, A.; Solomon, J.; Peshkin, M.; Hartmann, M. Multifunctional whisker arrays for distance detection, terrain mapping, and object feature extraction. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA 2005), Barcelona, Spain, 18–22 April 2005; pp. 2588–2593.
- Muraoka, S. Environmental recognition using artificial active antenna system with quartz resonator force sensor. Measurement 2005, 37, 157–165. [Google Scholar] [CrossRef]
- Rossi, D. Artificial tactile sensing and haptic perception. Meas. Sci. Technol. 1991, 2, 1003–1016. [Google Scholar] [CrossRef]
- Kepler, R.; Anderson, R. Piezoelectricity and pyroelectricity in polyvinylidene fluoride. J. Appl. Phys. 1978, 49, 4490–4494. [Google Scholar] [CrossRef]
- Purvis, C.; Taylor, P. Piezoelectricity and pyroelectricity in polyvinylidene fluoride: Influence of the lattice structure. J. Appl. Phys. 1983, 54, 1021–1028. [Google Scholar] [CrossRef]
- Flanagan, J.; Wing, A. Modulation of grip force with load force during point-to-point arm movements. Exp. Brain Res. 1993, 95, 131–143. [Google Scholar] [CrossRef] [PubMed]
- Timoshenko, S.; Young, D. Elements of Strength of Materials; Van Nostrand: Princeton, NJ, USA, 1968. [Google Scholar]
- Nwokah, O.; Hurmuzlu, Y. The Mechanical Systems Design Handbook: Modeling, Measurement, and Control; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Beatty, M. Principles of Engineering Mechanics; Springer: Berlin, Germany, 2006. [Google Scholar]
- Kleinfeld, D.; Ahissar, E.; Diamond, M. Active sensation: Insights from the rodent vibrissa sensorimotor system. Curr. Opin. Neurobiol. 2006, 16, 435–444. [Google Scholar] [CrossRef] [PubMed]
- Mehta, S.; Kleinfeld, D. Frisking the Whiskers: Patterned Sensory Input in the Rat Vibrissa System. Neuron 2004, 41, 181–184. [Google Scholar] [CrossRef]
- Moore, C.; Andermann, M. The Vibrissa Resonance Hypothesis; CRC Press: Boca Raton, FL, USA, 2005; pp. 21–60. [Google Scholar]
- Andermann, M.; Ritt, J.; Neimark, M.; Moore, C. Neural Correlates of Vibrissa Resonance: Band-Pass and Somatotopic Representation of High-Frequency Stimuli. Neuron 2004, 42, 451–463. [Google Scholar] [CrossRef]
- Rubio-Sierra, F.J.; Vázquez, R.; Stark, R.W. Transfer function analysis of the micro cantilever used in atomic force microscopy. IEEE Trans. Nanotechnol. 2006, 5, 692–699. [Google Scholar] [CrossRef]
- Vázquez, R.; Javier Rubio-Sierra, F.; Stark, R.W. Multimodal analysis of force spectroscopy based on a transfer function study of micro-cantilevers. Nanotechnology 2007, 18, 185504–185511. [Google Scholar] [CrossRef]
- Sachdev, R.; Sato, T.; Ebner, F. Divergent movement of adjacent whiskers. J. Neurophysiol. 2002, 87, 1440–1448. [Google Scholar] [PubMed]
- Brecht, M.; Preilowski, B.; Merzenich, M. Functional architecture of the mystacial vibrissae. Behav. Brain Res. 1997, 84, 81–97. [Google Scholar] [CrossRef]
- Neimark, M.; Andermann, M.; Hopfield, J.; Moore, C. Vibrissa resonance as a transduction mechanism for tactile encoding. J. Neurosci. 2003, 23, 6499–6509. [Google Scholar] [PubMed]
- Barsky, M.; Linder, D.; Claus, R. Robot Gripper Control System Using PVDF Piezoelectric Sensors. U.S. Patent 4,792,715, 20 December 1988. [Google Scholar]
- Dahiya, R.S.; Valle, M. Tactile Sensing for Robotic Applications. In Sensors: Focus on Tactile Force and Stress Sensors; Rocha, J.G., Lanceros-Mendez, S., Eds.; InTech Open Access: Vienna, Australia, 2008. [Google Scholar]
- De Boer, M.; Michalske, T. Accurate method for determining adhesion of cantilever beams. J. Appl. Phys. 1999, 86, 817. [Google Scholar] [CrossRef]
- Hosaka, H.; Itao, K.; Kuroda, S. Damping characteristics of beam-shaped micro-oscillators. Sens. Actuators A Phys. 1995, 49, 87–95. [Google Scholar] [CrossRef]
- Quercioli, F.; Tiribilli, B.; Ascoli, C.; Baschieri, P.; Frediani, C. Monitoring of an atomic force microscope cantilever with a compact disk pickup. Rev. Sci. Instrum. 1999, 70, 3620. [Google Scholar] [CrossRef]
- Leahy, S.; Lai, Y. A cantilever biosensor exploiting electrokinetic capture to detect Escherichia coli in real time. Sens. Actuators B Chem. 2017, 238, 292–297. [Google Scholar] [CrossRef]
- Lavrik, N.; Sepaniak, M.; Datskos, P. Cantilever transducers as a platform for chemical and biological sensors. Rev. Sci. Instrum. 2004, 75, 2229. [Google Scholar] [CrossRef]
- DiZinno, N.; Vradis, G. Transient Laminar Cross-Flow over a Rigid Cantilever Plate. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; p. 0330.
- Kim, Y.H.; Wereley, S.T.; Chun, C.H. Phase-resolved flow field produced by a vibrating cantilever plate between two endplates. Phys. Fluids 2004, 16, 145–162. [Google Scholar] [CrossRef]
- Schwarz, C. The Slip Hypothesis: Tactile Perception and its Neuronal Bases. Trends Neurosci. 2016, 39, 449–462. [Google Scholar] [CrossRef] [PubMed]
- Hipp, J.; Arabzadeh, E.; Zorzin, E.; Conradt, J.; Kayser, C.; Diamond, M.; Konig, P. Texture signals in whisker vibrations. J. Neurophysiol. 2006, 95, 1792–1799. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | No of Whisker Shafts | Whisker Materials | Transduction Principle | Actuation Principle |
|---|---|---|---|---|
| Kim and Moller [22] | Two sets of whisker arrays | Steel beam 0.5 mm diameter | Hall effect magnetic | DC (direct current) motor driven Koala platform |
| Fend et al. [23] | Two arrays with four whisker shafts on each | Natural rat whisker | Capacitance, Microphone | Servo motor |
| Yokoi, Fend and Pfeifer [26] | 8 shafts | Natural rat whisker | Capacitance, Microphone | Servo motor |
| Gopal and Hartman [5] | 4 shafts | Nickel titanium | Resistance, strain gauges | DC motor |
| Wajiha and Russell [27] | 1 shaft | Steel wire, 20 cm length, 1.6 mm diameter | Resistance, potentiometer based | Mobile robot |
| Bertetto and Ruggiu [28] | 3 shafts | Copper whiskers | Resistance, rubber brick doped with graphite | None |
| Schultz et al. [29] | 4 shafts | Set 1: Copper wire Set 2: Flex sensor | Set 1: Resistive, strain gauge Set 2: Resistive, flex sensors | 5-bar linkage system driven by a motor |
| Shigenobu Muraoka [30] | 1 shaft | Cylindrical stainless steel rod, 6 mm in diameter and 150 mm in length | Frequency shift | Four pairs of quartz resonators |
| Mode | Analytical Model (Hz) | FEM 3D (Hz) | Relative Error (%) |
|---|---|---|---|
| 1st Eigenfrequency | 106.164 | 106.183 | 0.017 |
| 2nd Eigenfrequency | 665.296 | 665.311 | 0.002 |
| 3rd Eigenfrequency | 1862.894 | 1862.271 | 0.033 |
| 4th Eigenfrequency | 3650.555 | 3647.553 | 0.082 |
| 5th Eigenfrequency | 6034.615 | 6026.051 | 0.141 |
| 6th Eigenfrequency | 9014.696 | 8995.007 | 0.218 |
| Mode | Case 1 (Hz) | Case 2 (Hz) | Case 3 (Hz) | Case 4 (Hz) |
|---|---|---|---|---|
| 1st Eigenfrequency | 106.125 | 106.125 | 106.125 | 106.125 |
| 1st Antiresonance | 465.393 | 297.728 | x | x |
| 2nd Eigenfrequency | 664.997 | 664.997 | 664.997 | 664.997 |
| 2nd Antiresonance | 1509.454 | 1190.748 | 1190.748 | x |
| 3rd Eigenfrequency | 1861.316 | 1861.316 | 1861.316 | 1861.316 |
| 3rd Antiresonance | 3146.444 | 2684.232 | x | x |
| 4th Eigenfrequency | 3654.434 | 3654.434 | 3654.434 | 3654.434 |
| 4th Antiresonance | 5380.468 | 4762.337 | 4762.337 | x |
| 5th Eigenfrequency | 6036.985 | 6036.985 | 6036.985 | 6036.985 |
| 5th Antiresonance | 8219.021 | 7444.235 | x | x |
| 6th Eigenfrequency | 9011.978 | 9011.978 | 9011.978 | 9011.978 |
| 6th Antiresonance | 11,636.439 | 10,735.447 | 10,735.447 | x |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tiwana, M.I.; Tiwana, M.I.; Redmond, S.J.; Lovell, N.H.; Iqbal, J. Bio-Inspired PVDF-Based, Mouse Whisker Mimicking, Tactile Sensor. Appl. Sci. 2016, 6, 297. https://doi.org/10.3390/app6100297
Tiwana MI, Tiwana MI, Redmond SJ, Lovell NH, Iqbal J. Bio-Inspired PVDF-Based, Mouse Whisker Mimicking, Tactile Sensor. Applied Sciences. 2016; 6(10):297. https://doi.org/10.3390/app6100297
Chicago/Turabian StyleTiwana, Mohsin Islam, Moazzam Islam Tiwana, Stephen James Redmond, Nigel Hamilton Lovell, and Javaid Iqbal. 2016. "Bio-Inspired PVDF-Based, Mouse Whisker Mimicking, Tactile Sensor" Applied Sciences 6, no. 10: 297. https://doi.org/10.3390/app6100297
APA StyleTiwana, M. I., Tiwana, M. I., Redmond, S. J., Lovell, N. H., & Iqbal, J. (2016). Bio-Inspired PVDF-Based, Mouse Whisker Mimicking, Tactile Sensor. Applied Sciences, 6(10), 297. https://doi.org/10.3390/app6100297