
Nonlinear Adaptive Rotational Speed Control Design and Experiment of the Propeller of an Electric Micro Air Vehicle


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
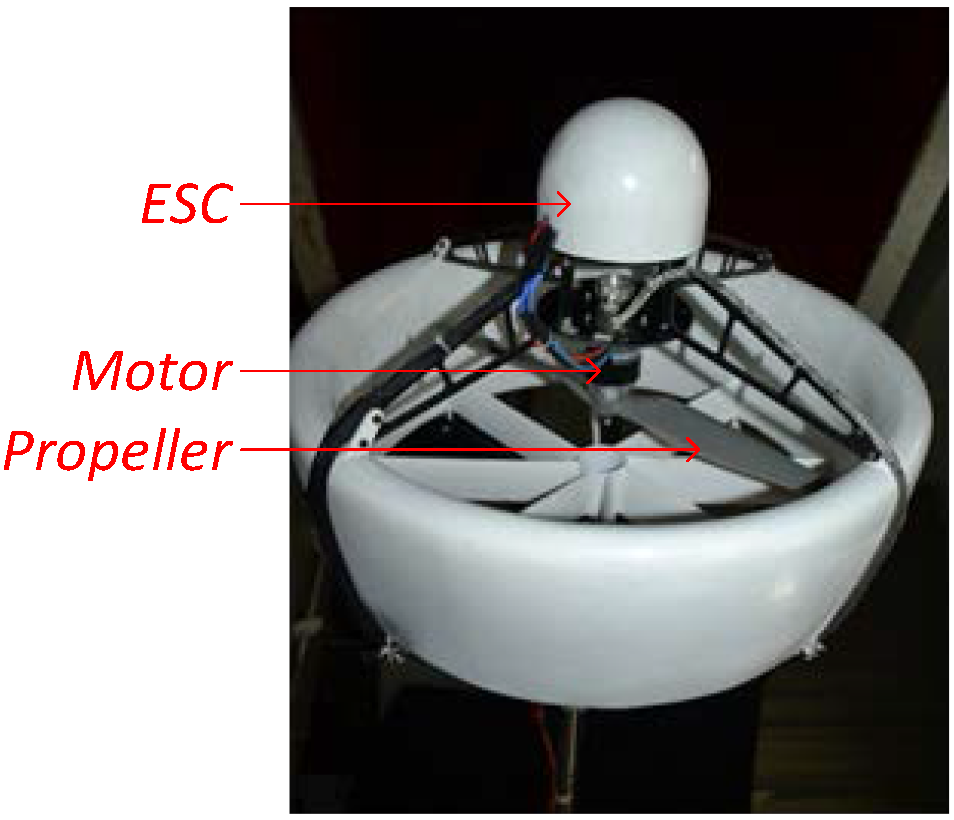
2. The Rotational Speed Control Problem of the Propeller of the Prototype Electric MAV
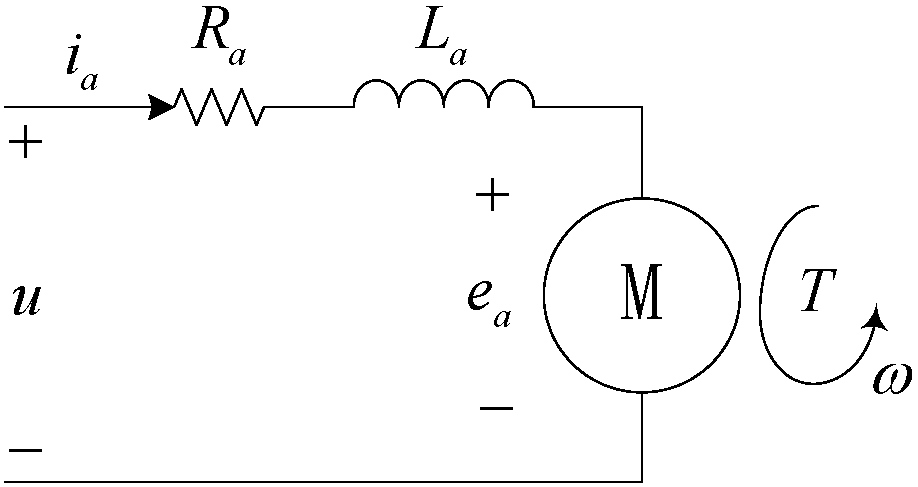
3. Modeling of the Rotational Speed System of the Propeller
4. Nonlinear Adaptive Rotational Speed Control of the Propeller
4.1. Nonlinear Adaptive Control Algorithm
4.2. Comparative Analysis of the Learning Performance of the Proposed Adaptive Laws
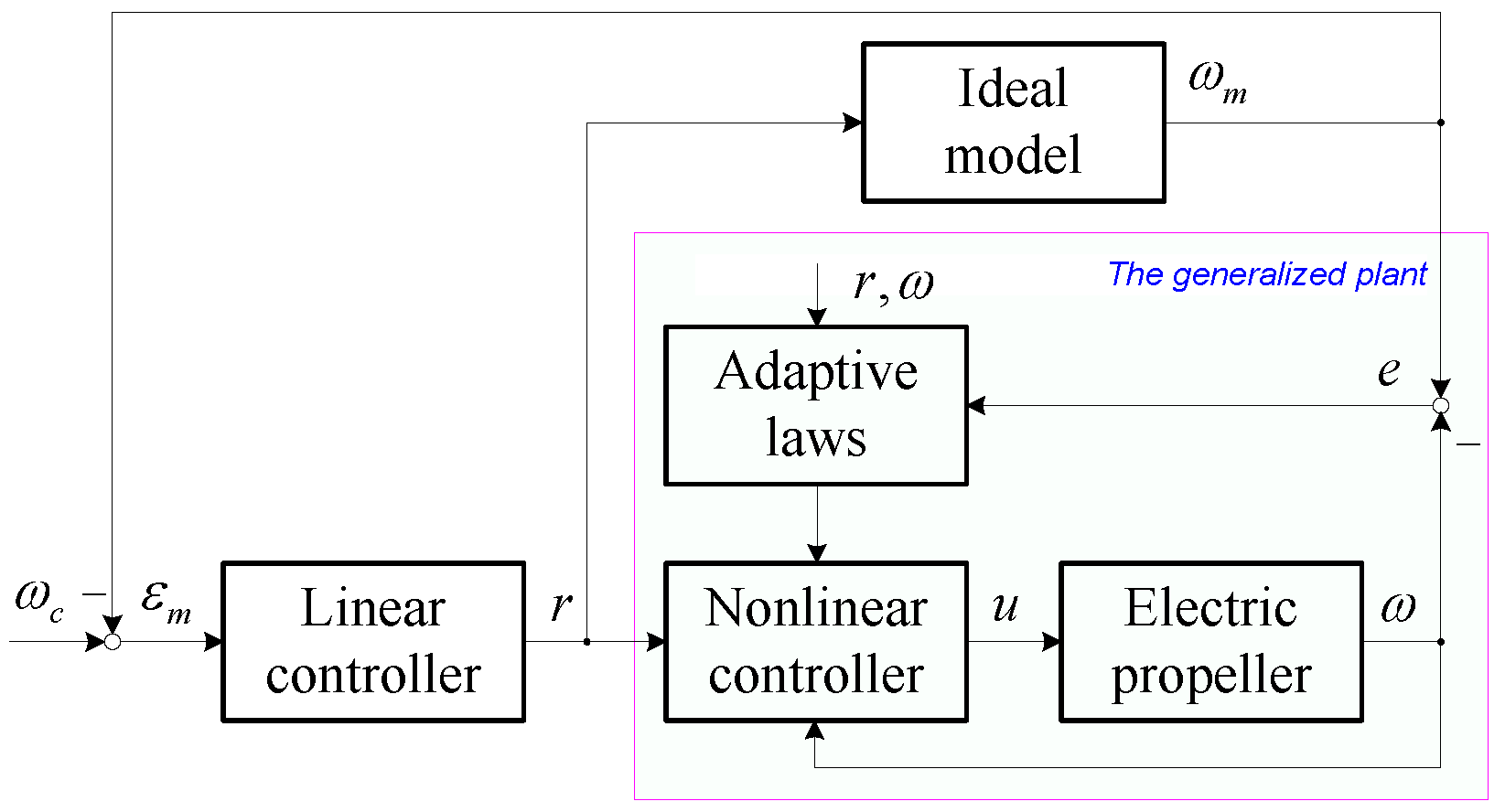
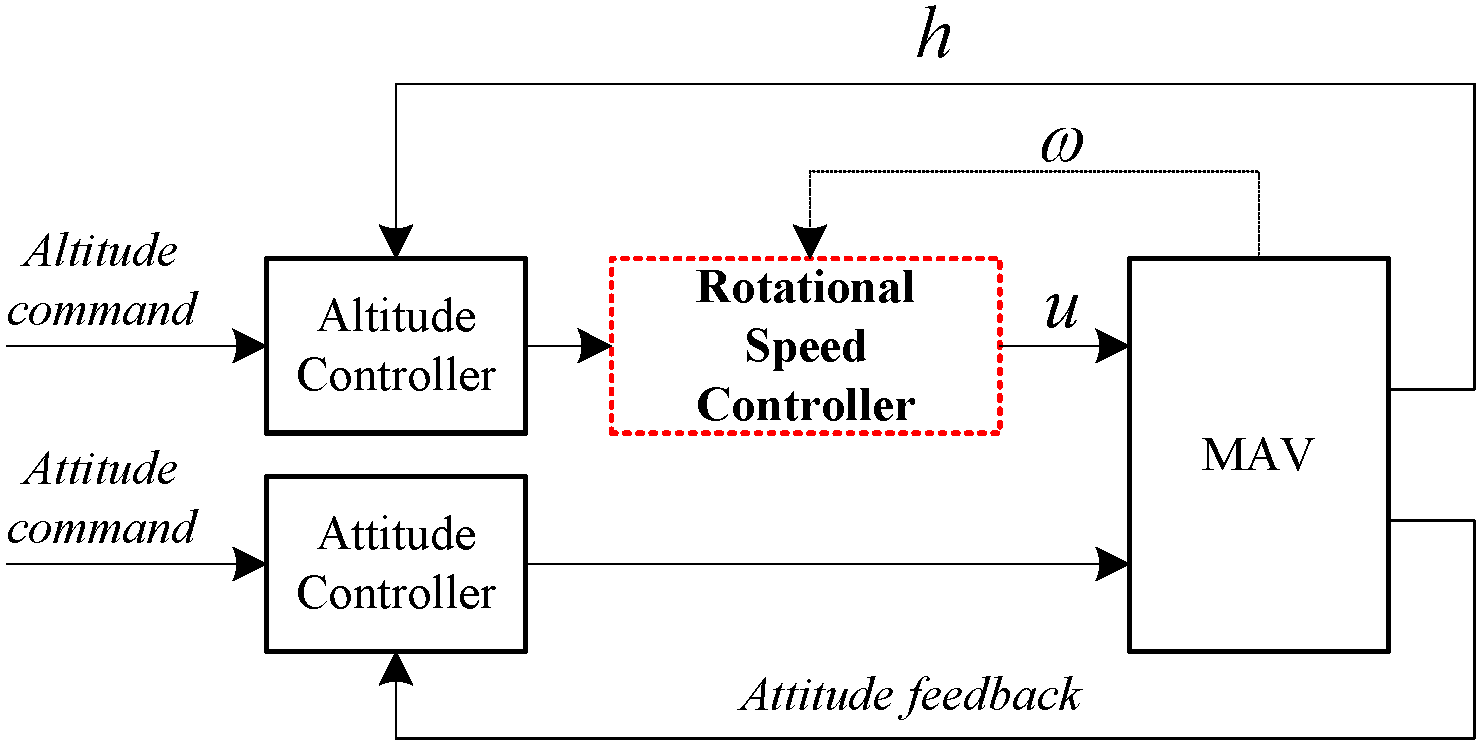
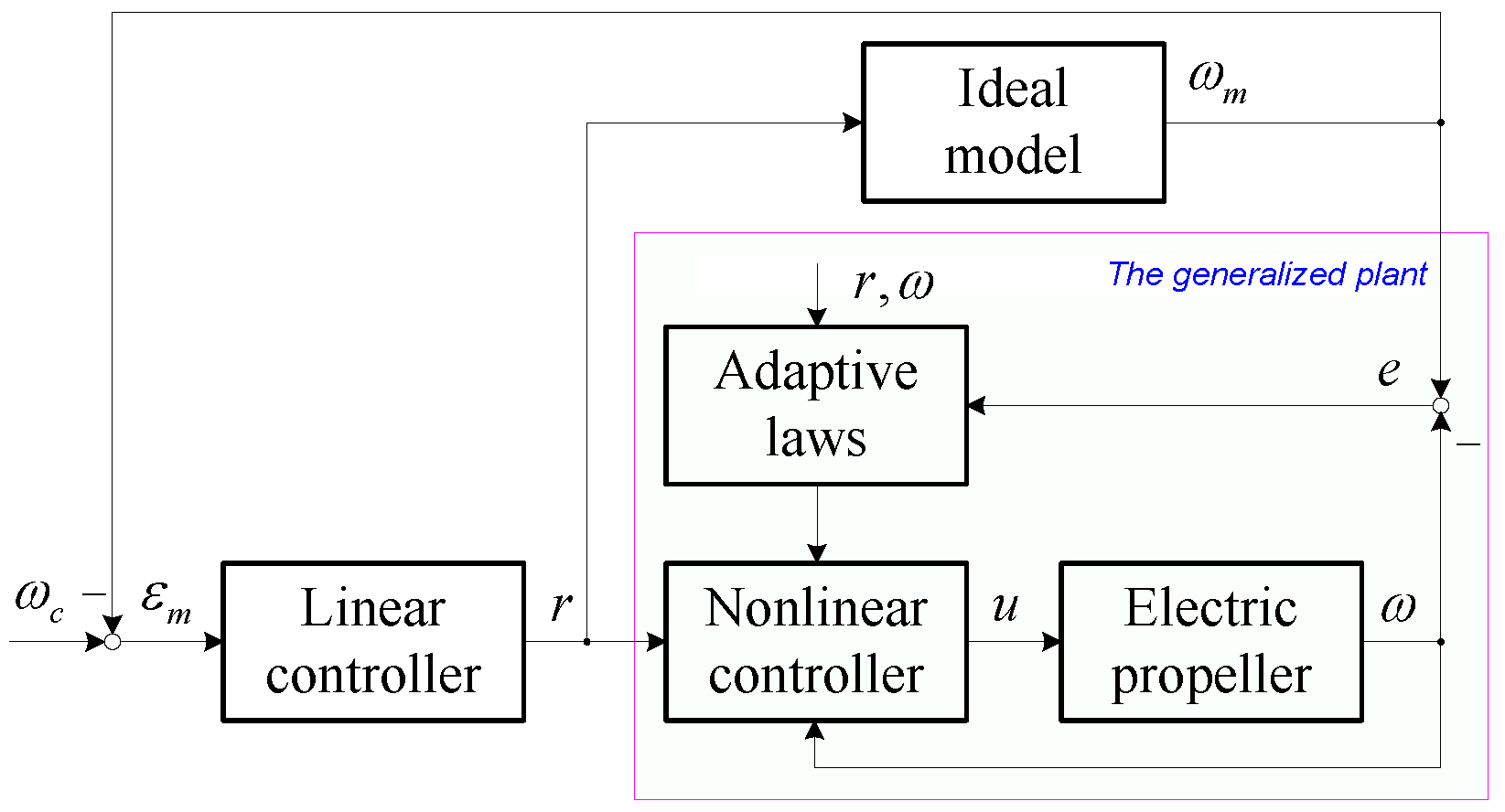
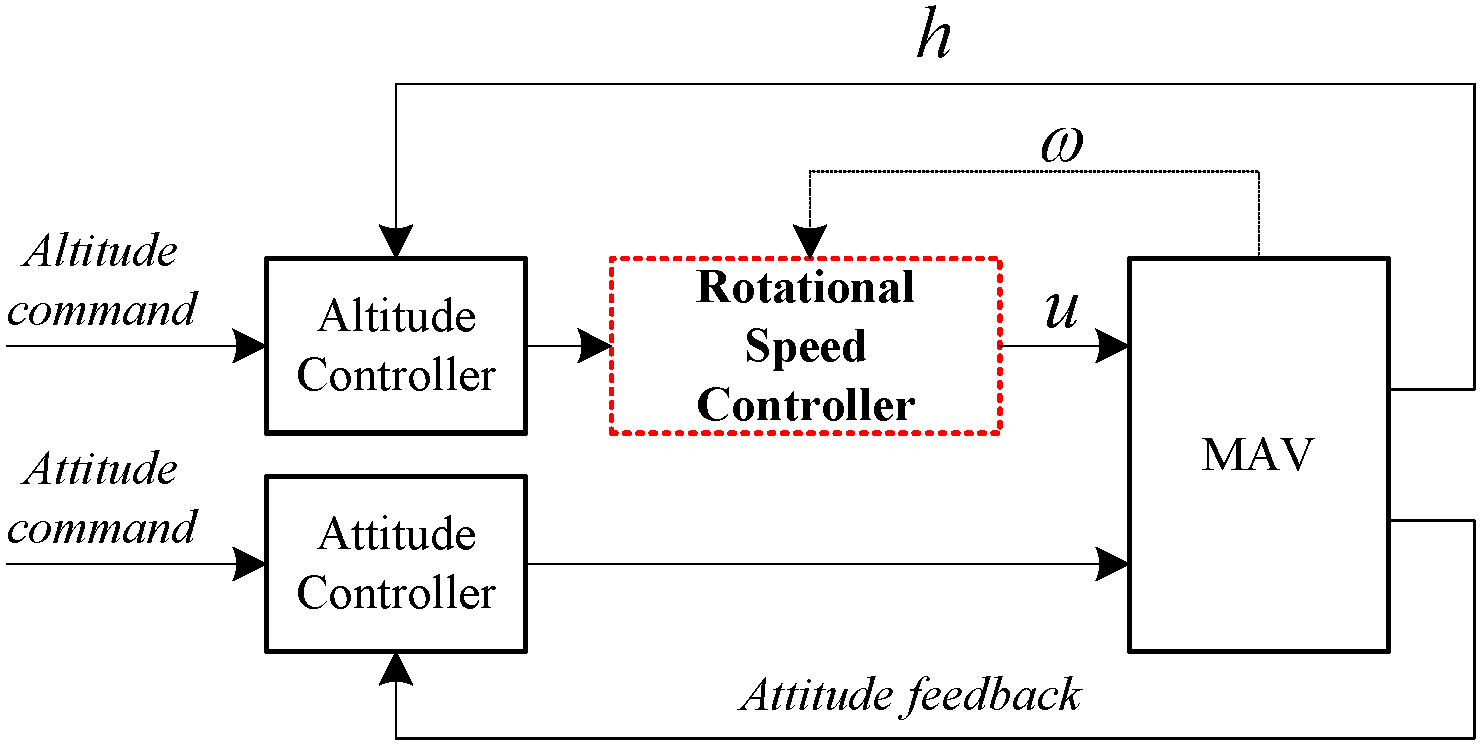
4.3. The Nonlinear Adaptive Control Diagram
5. Experimental Tests
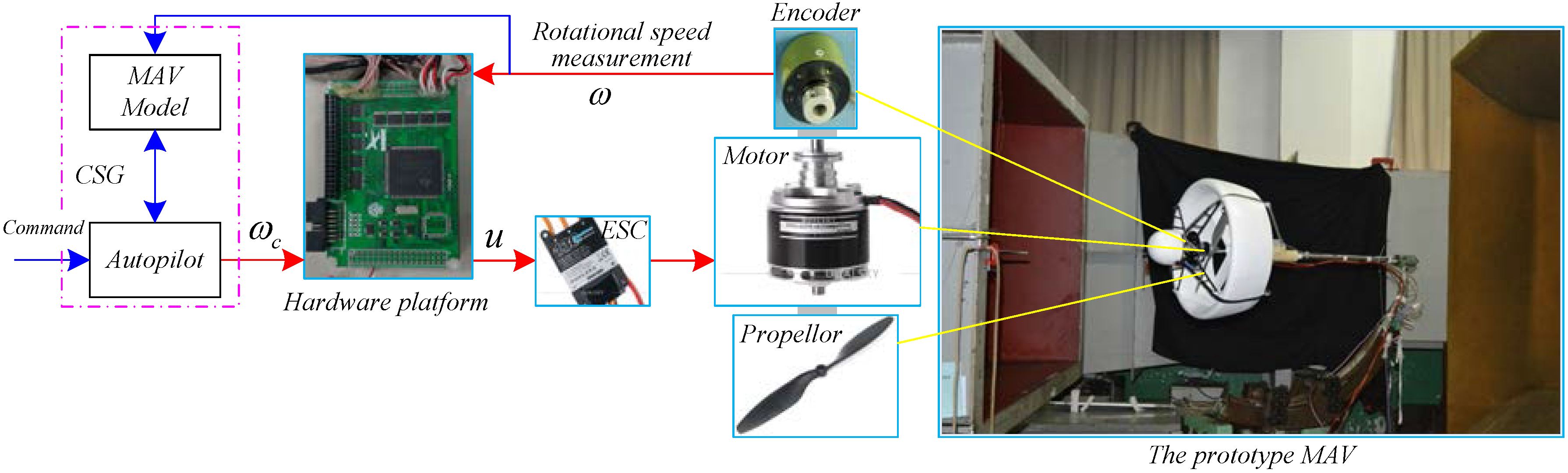
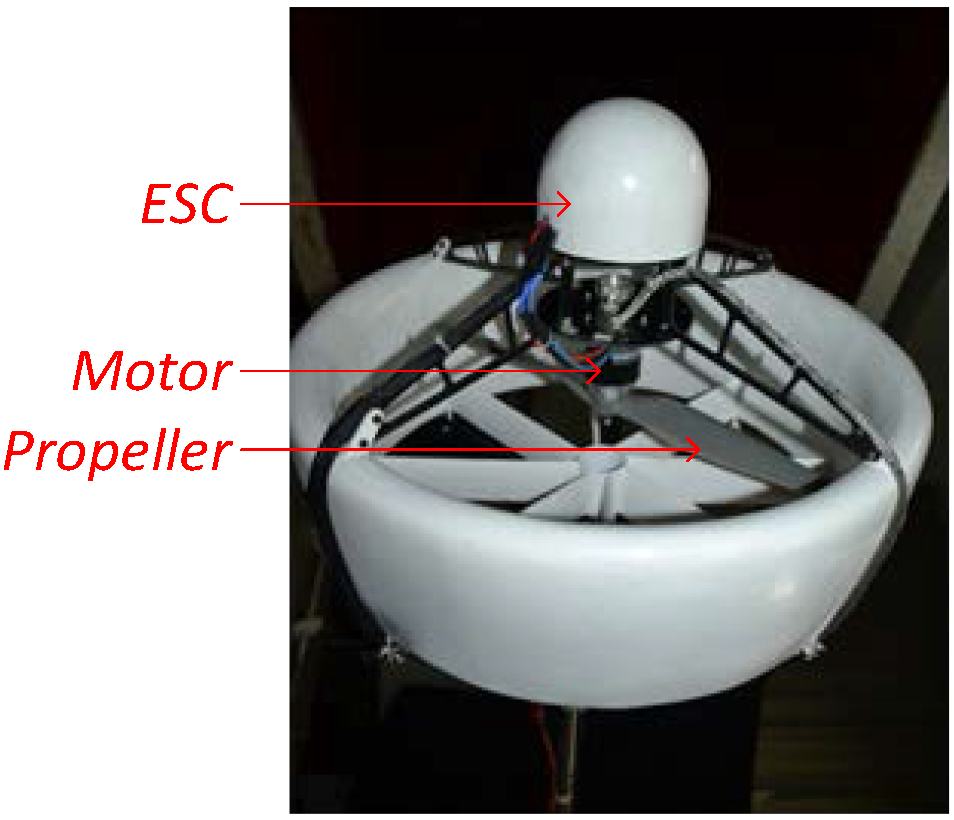
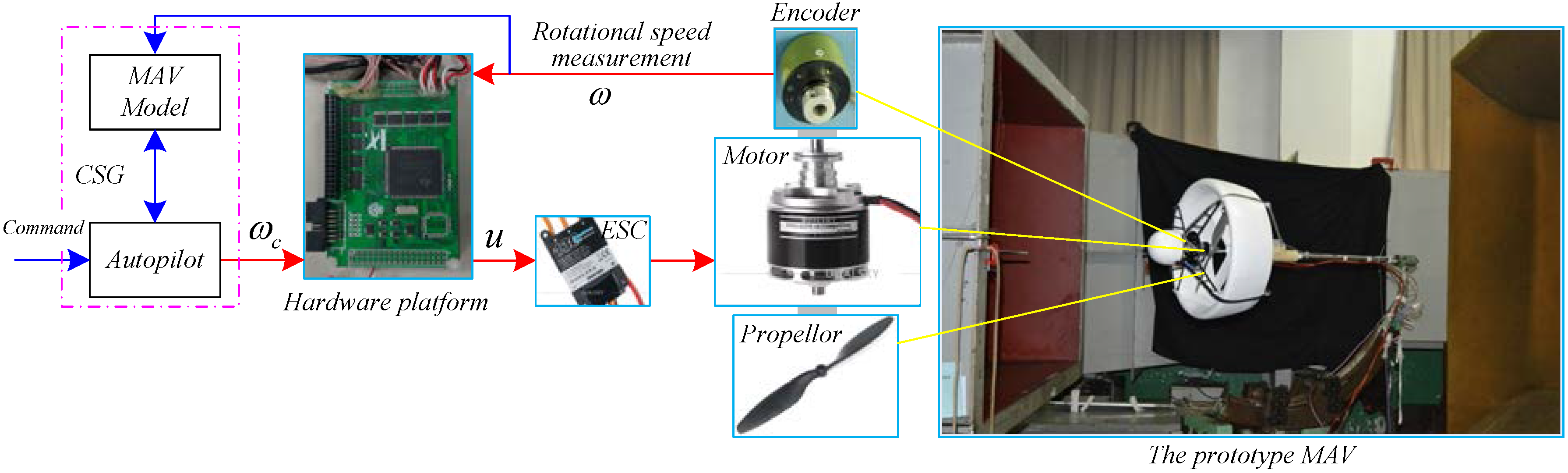
5.1. The HIL Experimental Setup and Description
- (1)
- Model parameters: ;
- (2)
- Initial values of adjustable parameters: ;
- (3)
- Adjustable parameter: ;Adaptive learning algorithm: ;
- (4)
- Soft limiting elements: ;
- (5)
- Linear controller: PID controller.
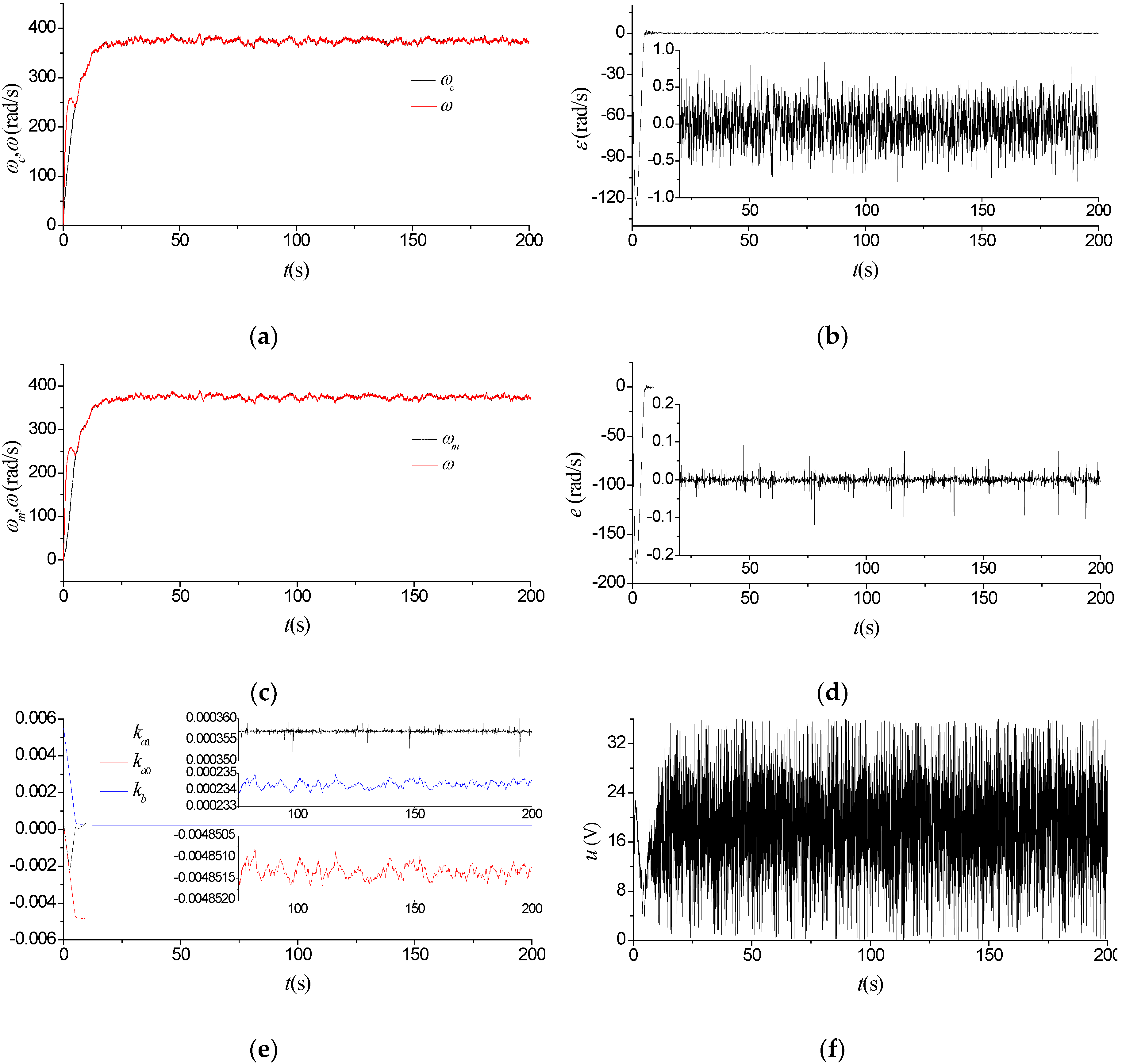
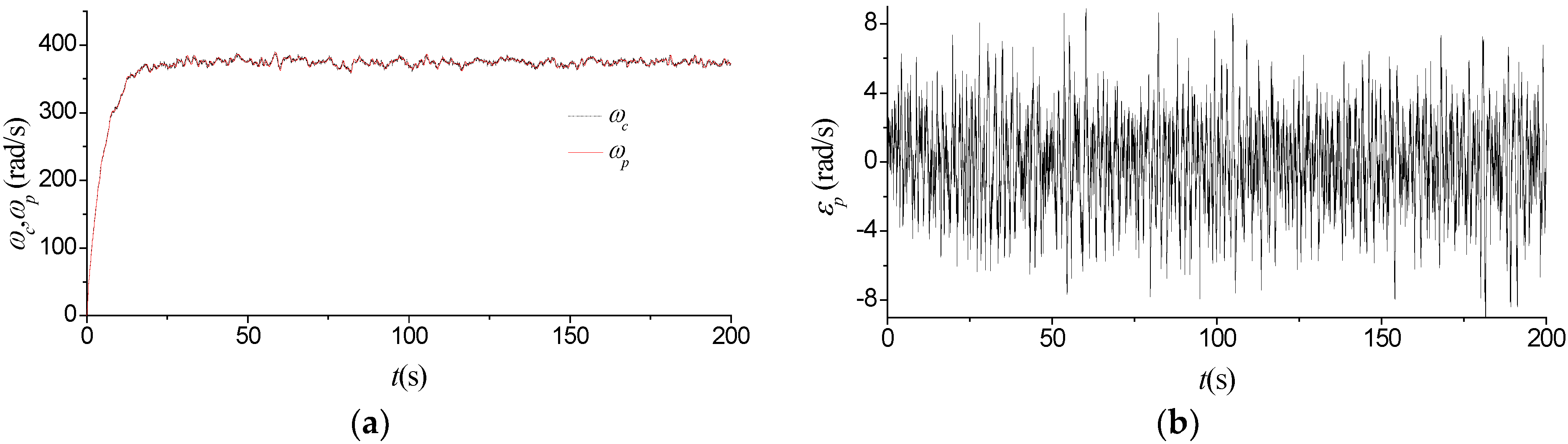
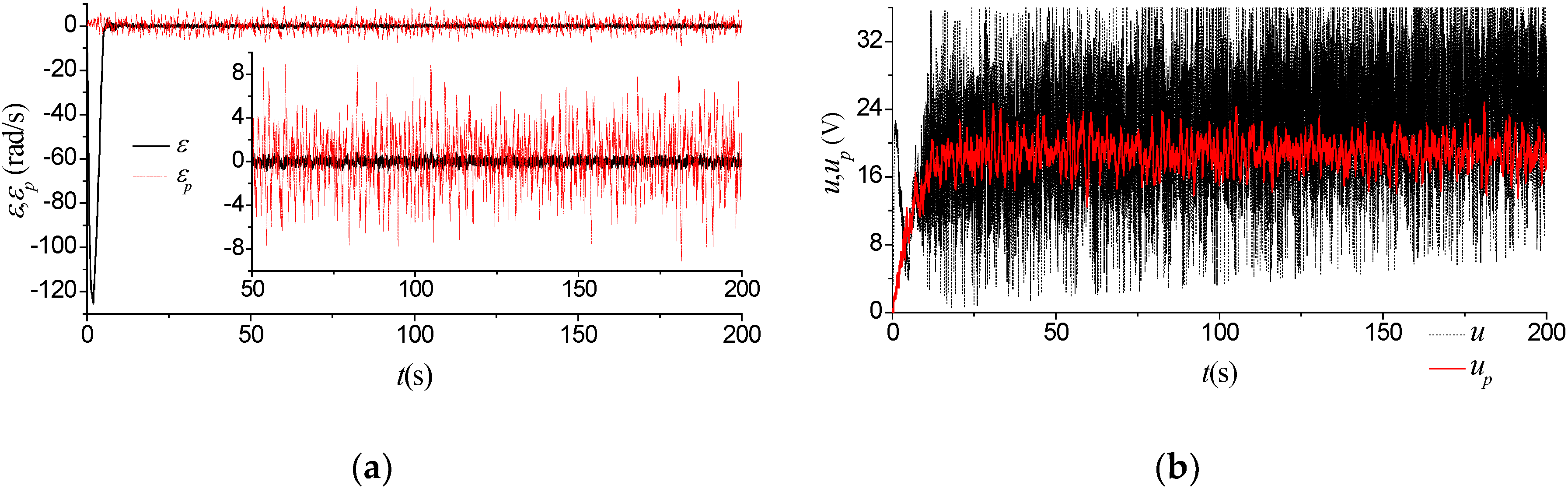
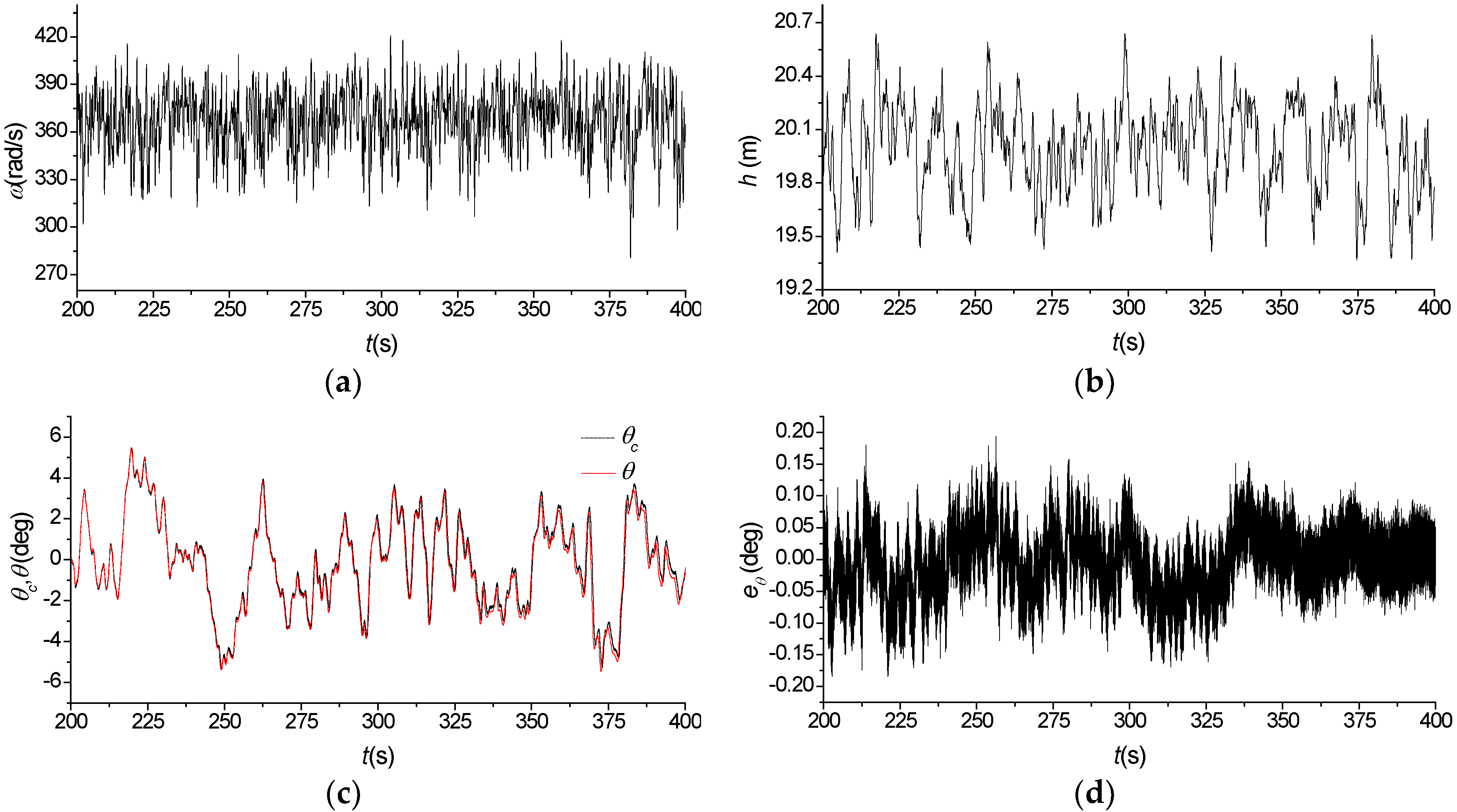
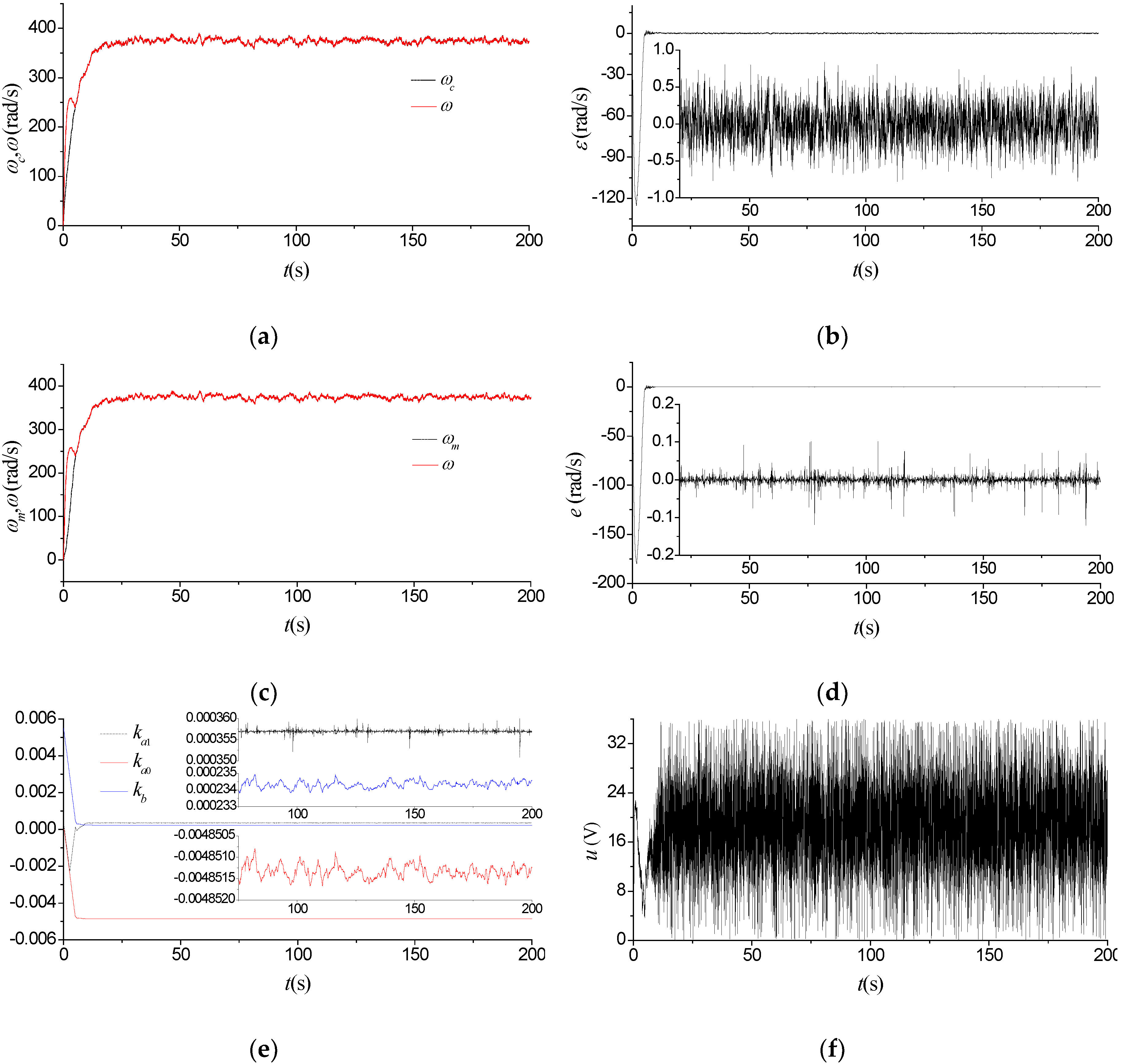
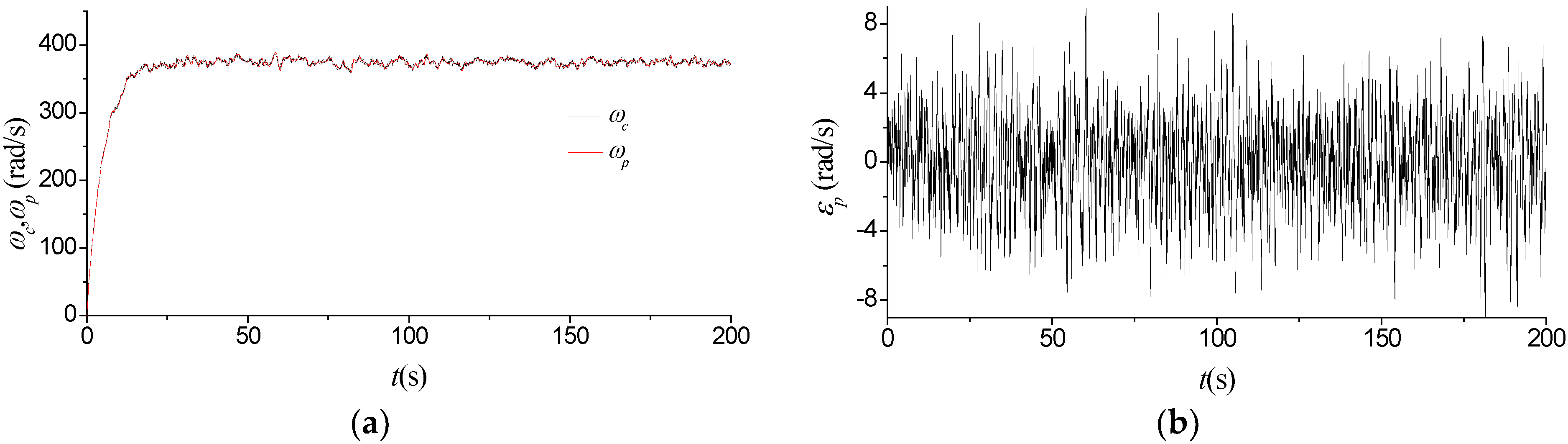
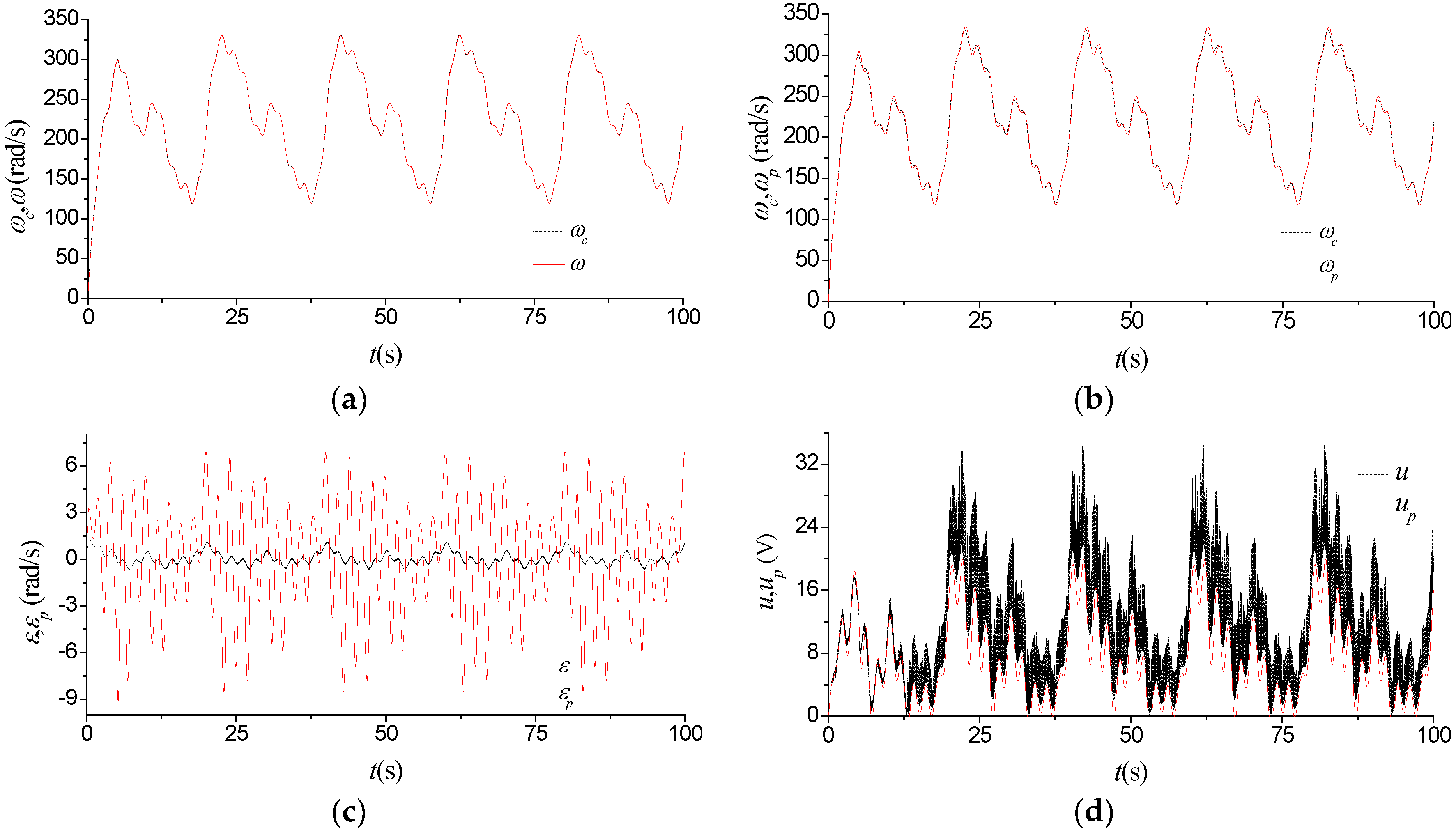
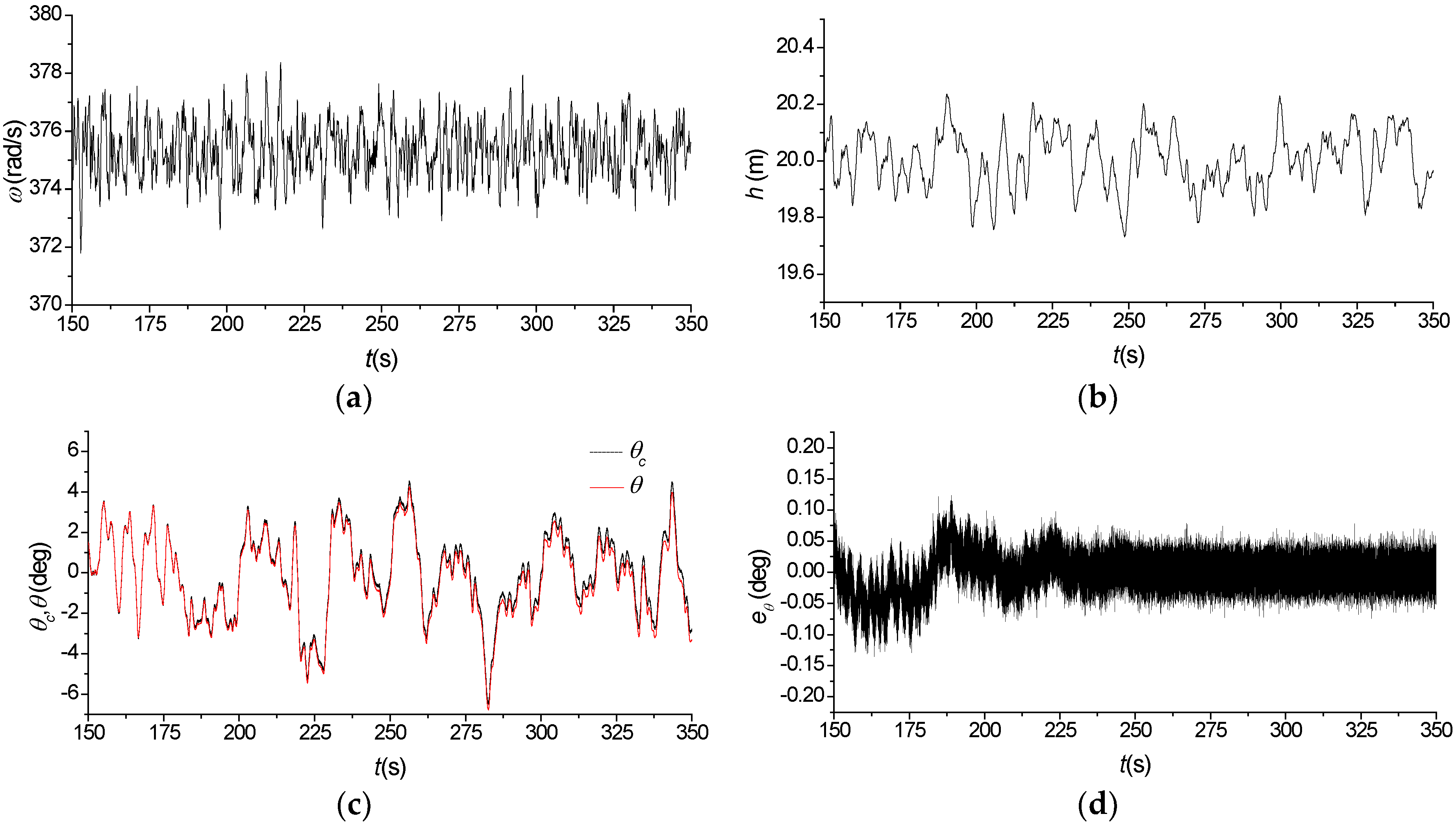
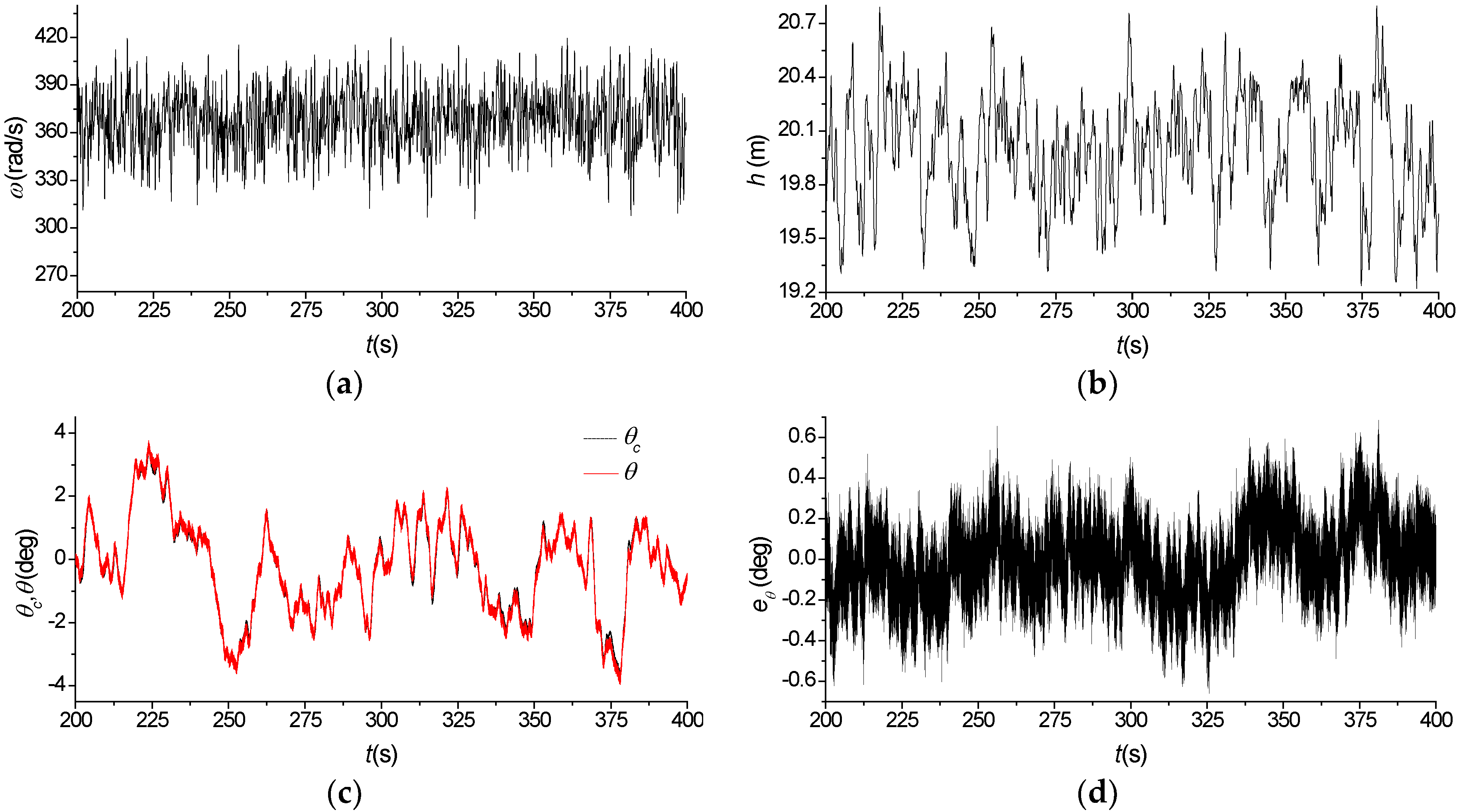
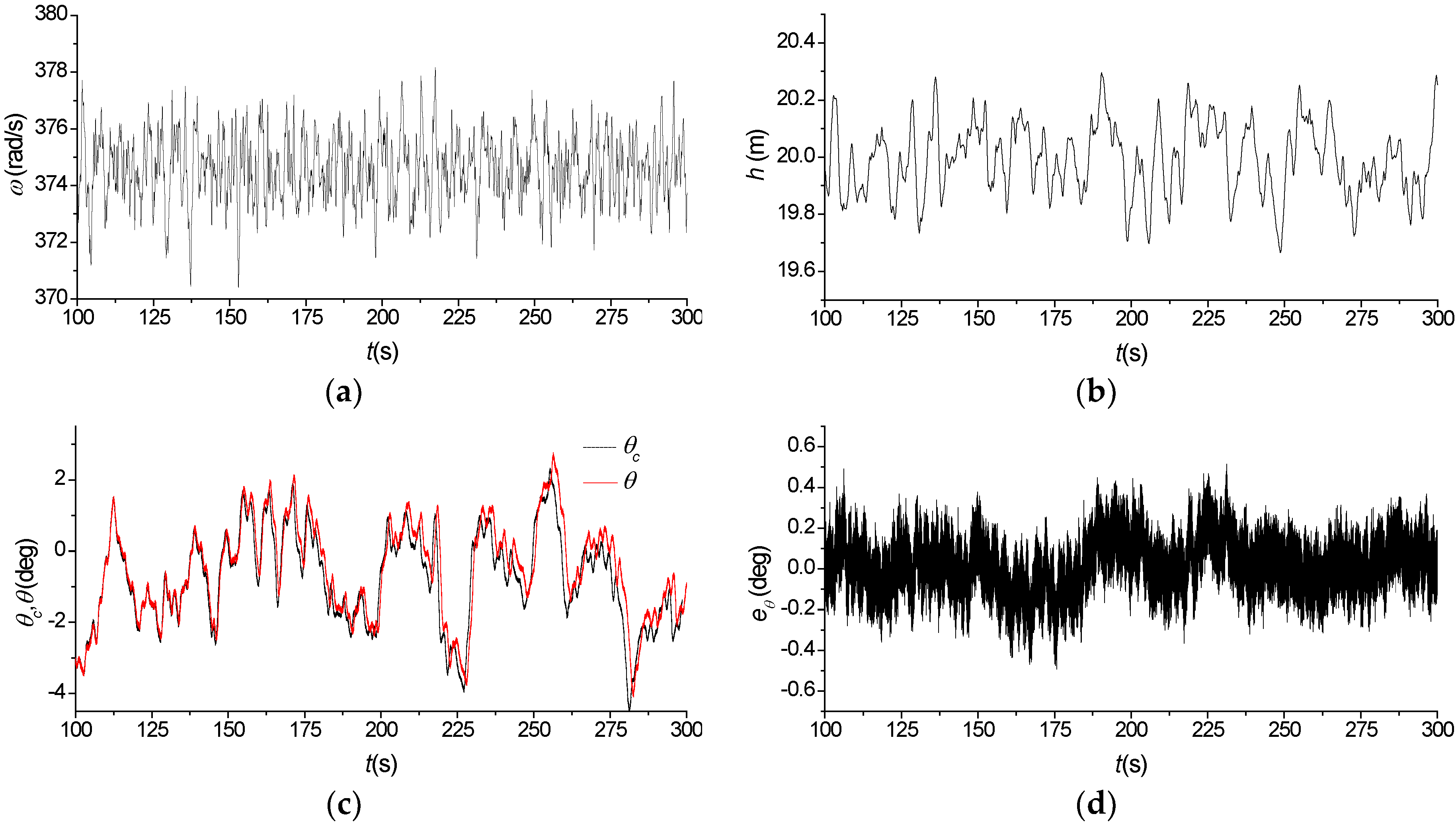
5.2. Experimental Tests and Discussions


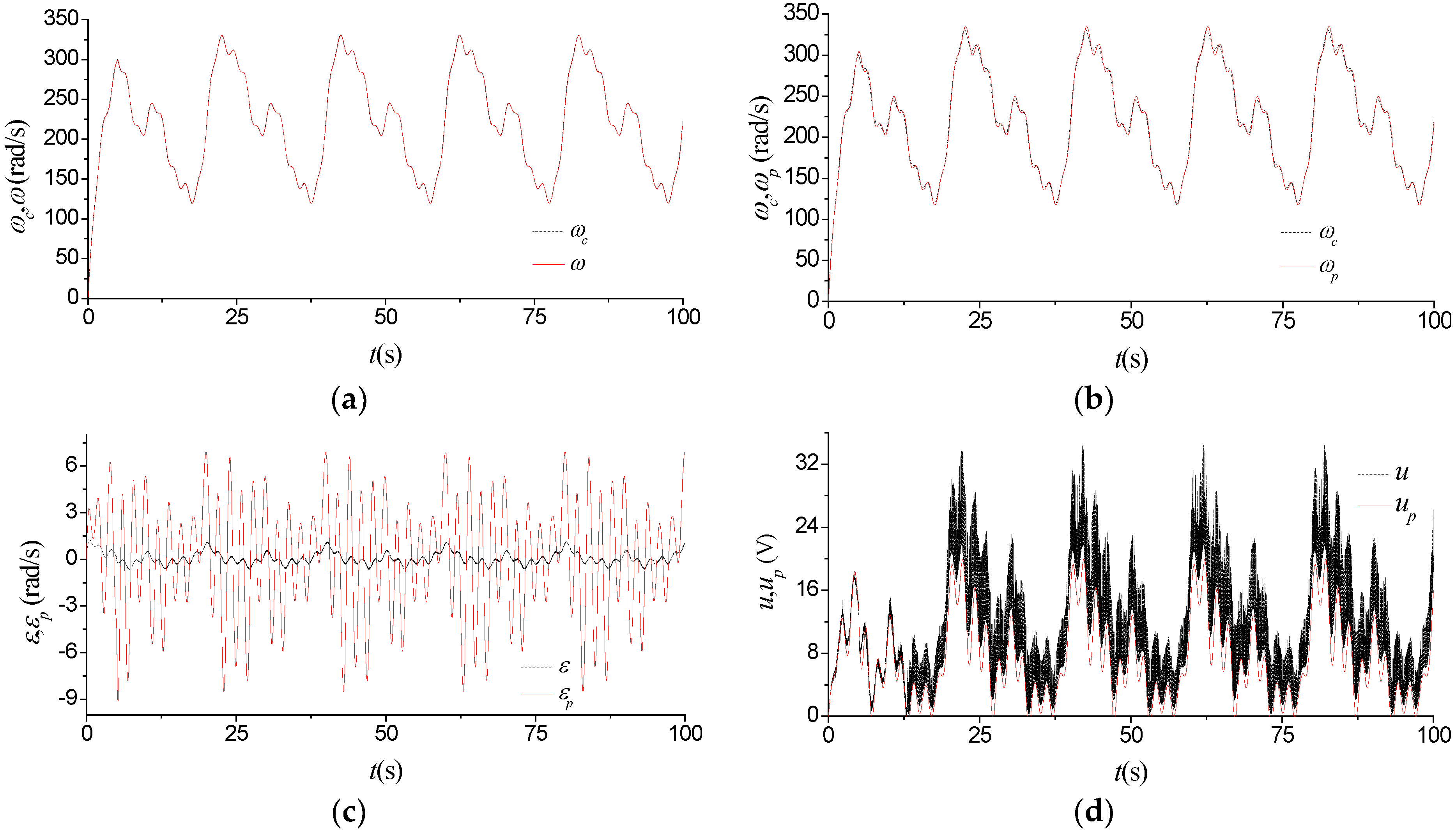
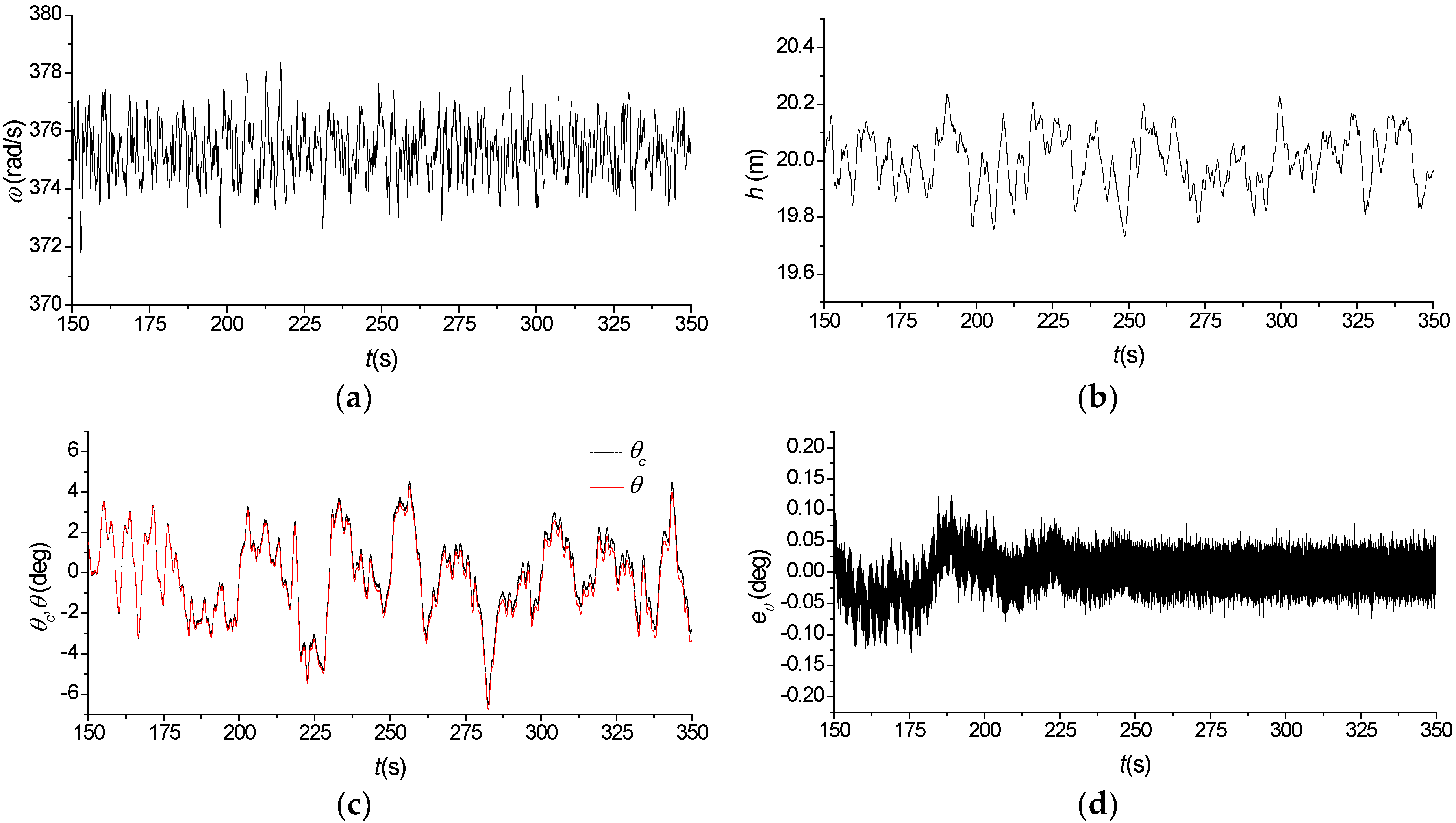
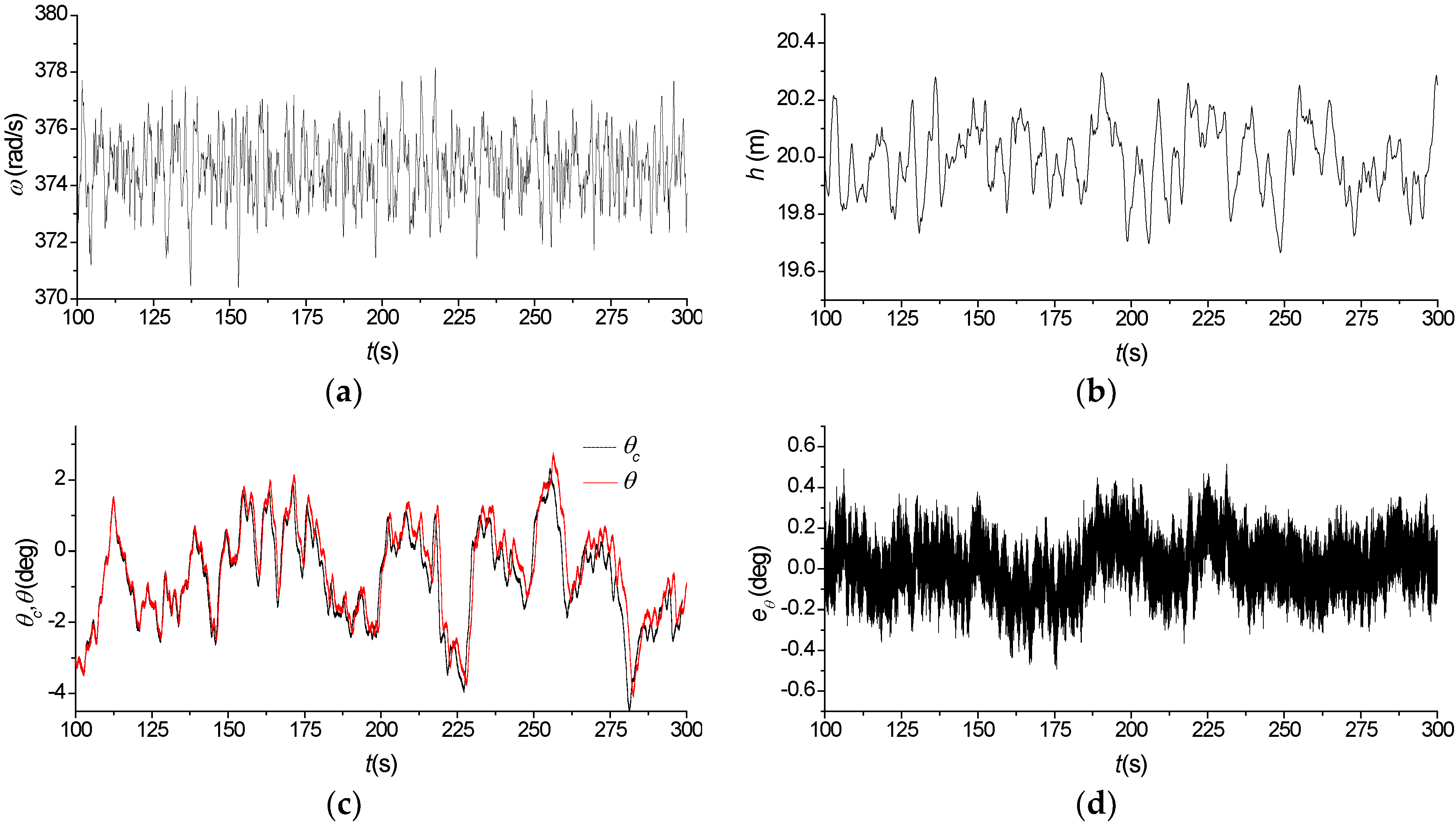
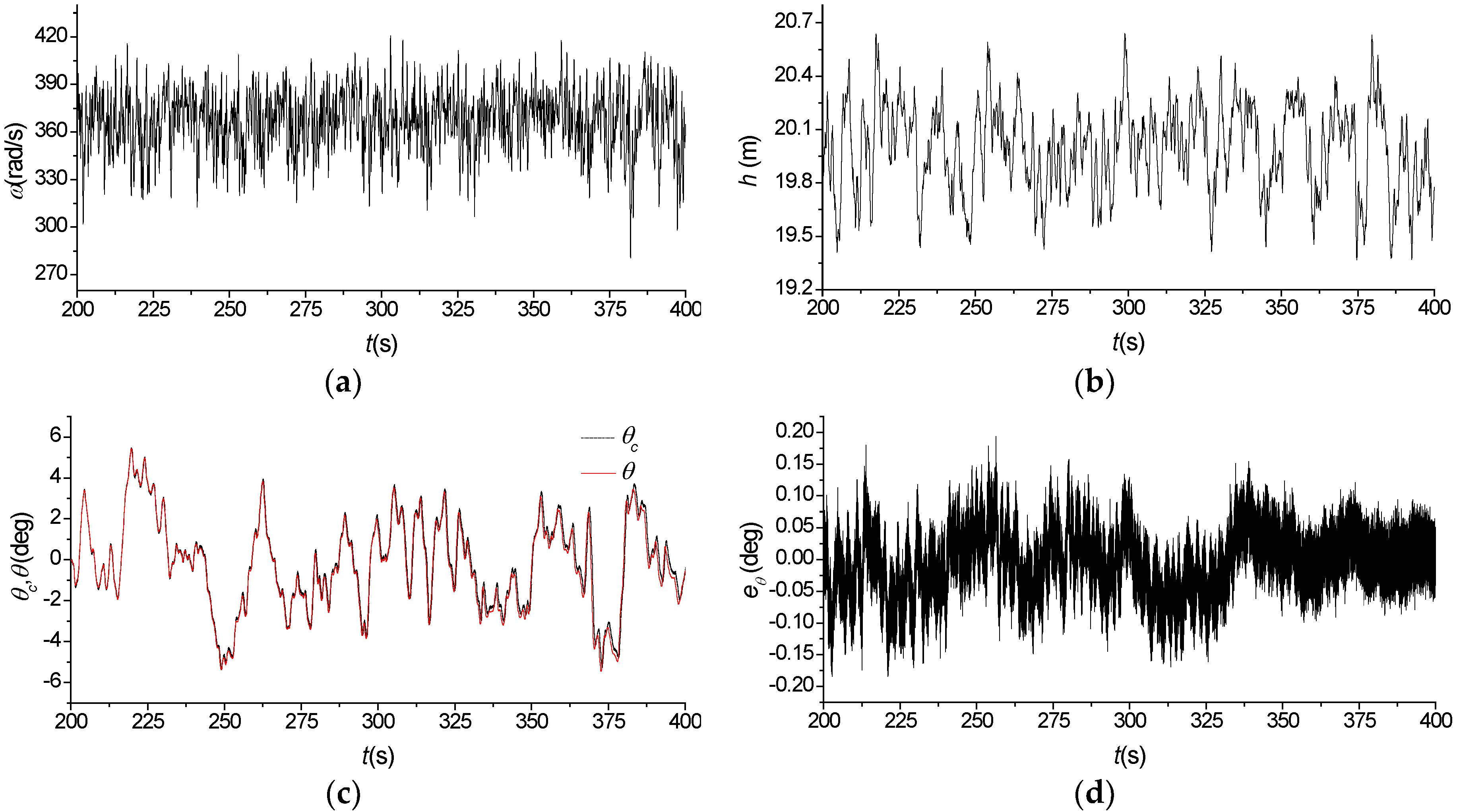
5.3. Flight Tests and Discussions

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sheng, S.; Sun, C. A Near-Hover Adaptive Attitude Control Strategy of a Ducted Fan Micro Aerial Vehicle with Actuator Dynamics. Appl. Sci. 2015, 5, 666–681. [Google Scholar] [CrossRef]
- Sheng, S.; Sun, C.; Zhao, H. Indirect Adaptive Attitude Control for a Ducted Fan Vertical Takeoff and Landing Microaerial Vehicle. Math. Probl. Eng. 2015, 2015, 1–11. [Google Scholar]
- Morris, S.; Holden, M. Design of micro air vehicles and flight test validation. In Proceeding of the Coference on Fixed, Flapping and Rotary Wing Vehicles at Very Low Reynolds Numbers, Notre Dame, IN, USA, 5–7 June 2000; pp. 153–176.
- Jung, D.; Tsiotras, P. Modeling and hardware-in-the-loop simulation for a small unmanned aerial vehicle. In Proceedings of the AIAA Infotech at Aerospace 2007 conference and exhibit, Rohnert Park, CA, USA, 7–10 May 2007.
- Martin, P.; Boxwell, D. Design, analysis and experiments on a 10-inch ducted rotor VTOL UAV. In Proceedings of the American Helicopter Society (AHS) International Specialists Meeting on Unmanned Rotorcraft: Design, Control and Testing, American Helicopter Society, Phoenix, AZ, USA, 18–20 January 2005; pp. 18–20.
- Pereira, J.; Chopra, I.; Gessow, A. Effects of shroud design variables on hover performance of a shrouded rotor for micro air vehicle applications. In Proceedings of the AHS International Specialists’ Meeting on Unmanned Rotorcraft, American Helicopter Society, San Marcos, CA, USA, 18–20 January 2005.
- Salluce, D.N. Comprehensive System Identification of Ducted Fan UAVs. Ph.D. Thesis, California Polytechnic State University, San Luis Obispo, CA, USA, January 2004. [Google Scholar]
- Ko, A.; Ohanian, O.J.; Gelhausen, P. Ducted fan UAV modeling and simulation in preliminary design. In Proceedings of the AIAA modeling and simulation technologies conference and exhibit, Keystone, CO, USA, 20–23 August 2007.
- Johnson, E.N.; Turbe, M.A. Modeling, control, and flight testing of a small ducted fan aircraft. J. Guid. Control Dyn. 2006, 29, 769–779. [Google Scholar] [CrossRef]
- Metni, N.; Pflimlin, J.M.; Hamel, T.; Soueres, P. Attitude and gyro bias estimation for a VTOL UAV. Control Eng. Pract. 2006, 14, 1511–1520. [Google Scholar] [CrossRef]
- Peddle, I.K.; Jones, T.; Treurnicht, J. Practical near hover flight control of a ducted fan (SLADe). Control Eng. Pract. 2009, 17, 48–58. [Google Scholar] [CrossRef]
- Sheng, S.; Mian, A.A.; Zhao, C.; Jiang, B. Autonomous take-off and landing control for a prototype unmanned helicopter. Control Eng. Pract. 2010, 18, 1053–1059. [Google Scholar] [CrossRef]
- Naldi, R.; Gentili, L.; Marconi, L.; Sala, A. Design and experimental validation of a nonlinear control law for a ducted-fan miniature aerial vehicle. Control Eng. Pract. 2010, 18, 747–760. [Google Scholar] [CrossRef]
- Pflimlin, J.M.; Soueres, P.; Hamel, T. Position control of a ducted fan VTOL UAV in crosswind. Int. J. Control 2007, 80, 666–683. [Google Scholar] [CrossRef]
- Pflimlin, J.M.; Binetti, P.; Soueres, P.; Hamel, T.; Trouchet, D. Modeling and attitude control analysis of a ducted-fan micro aerial vehicle. Control Eng. Pract. 2010, 18, 209–218. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Optimizing Electric Propulsion Systems for Unmanned Aerial Vehicles. J. Aircr. 2009, 46, 1340–1353. [Google Scholar] [CrossRef]
- Sinibaldi, G.; Marino, L. Experimental analysis on the noise of propellers for small UAV. Appl. Acoust. 2013, 74, 79–88. [Google Scholar] [CrossRef]
- Uragun, B.; Tansel, I.N. The noise reduction techniques for unmanned air vehicles. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014; pp. 800–807.
- Ragot, P.; Markovic, M.; Perriard, Y. Optimization of electric motor for a solar airplane application. IEEE Trans. Ind. Appl. 2006, 42, 1053–1061. [Google Scholar] [CrossRef]
- Green, C.R.; McDonald, R.A. Modeling and Test of the Efficiency of Electronic Speed Controllers for Brushless DC Motors. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015; pp. 3191–3200.
- Beard, R.W. Quadrotor Dynamics and Control; Brigham Young University: Provo, UT, USA, 2008. [Google Scholar]
- Shirsat, A.R. Modeling and Control of a Quadrotor Aircraft UAV. Ph.D. Thesis, Arizona State University, Tempe, AZ, USA, May 2015. [Google Scholar]
- Bouabdallah, S.; Murrieri, P.; Siegwart, R. Design and control of an indoor micro quadrotor. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4393–4398.
- Hanselman, D.C. Brushless Permanent Magnet Motor Design, 2nd ed.; The Writers’ Collective: Cranston, RI, USA, 2003; pp. 183–201. [Google Scholar]
- Johnson, W. A Comprehensive Analytical Model of Rotorcraft Aerodynamics and Dynamics. Part 1. Analysis Development; National Aeronautics and Space Administration Moffett Field CA Ames Research Center: Moffett Field, CA, USA, 1980. [Google Scholar]
- PX4 Autopilot. Available online: https://pixhawk.org/choice (accessed on 12 December 2015).
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, S.; Sun, C. Nonlinear Adaptive Rotational Speed Control Design and Experiment of the Propeller of an Electric Micro Air Vehicle. Appl. Sci. 2016, 6, 17. https://doi.org/10.3390/app6010017
Sheng S, Sun C. Nonlinear Adaptive Rotational Speed Control Design and Experiment of the Propeller of an Electric Micro Air Vehicle. Applied Sciences. 2016; 6(1):17. https://doi.org/10.3390/app6010017
Chicago/Turabian StyleSheng, Shouzhao, and Chenwu Sun. 2016. "Nonlinear Adaptive Rotational Speed Control Design and Experiment of the Propeller of an Electric Micro Air Vehicle" Applied Sciences 6, no. 1: 17. https://doi.org/10.3390/app6010017
APA StyleSheng, S., & Sun, C. (2016). Nonlinear Adaptive Rotational Speed Control Design and Experiment of the Propeller of an Electric Micro Air Vehicle. Applied Sciences, 6(1), 17. https://doi.org/10.3390/app6010017