
Machine-Learning-Based Rollover Risk Prediction for Autonomous Trucks: A Dynamic Stability Analysis


Abstract
1. Introduction
1.1. Research Gap
1.2. Problem Statement
1.3. Research Questions
- How does ESC installation influence the maximum safe slope angle for heavy trucks?
- Can rollover risks be accurately predicted using machine learning models based on planned path curvature and driving speed?
- What level of accuracy can be achieved through simulation-based prediction methods, and what are their limitations?
1.4. Hypothesis
1.5. Novelty of This Study
2. Methods
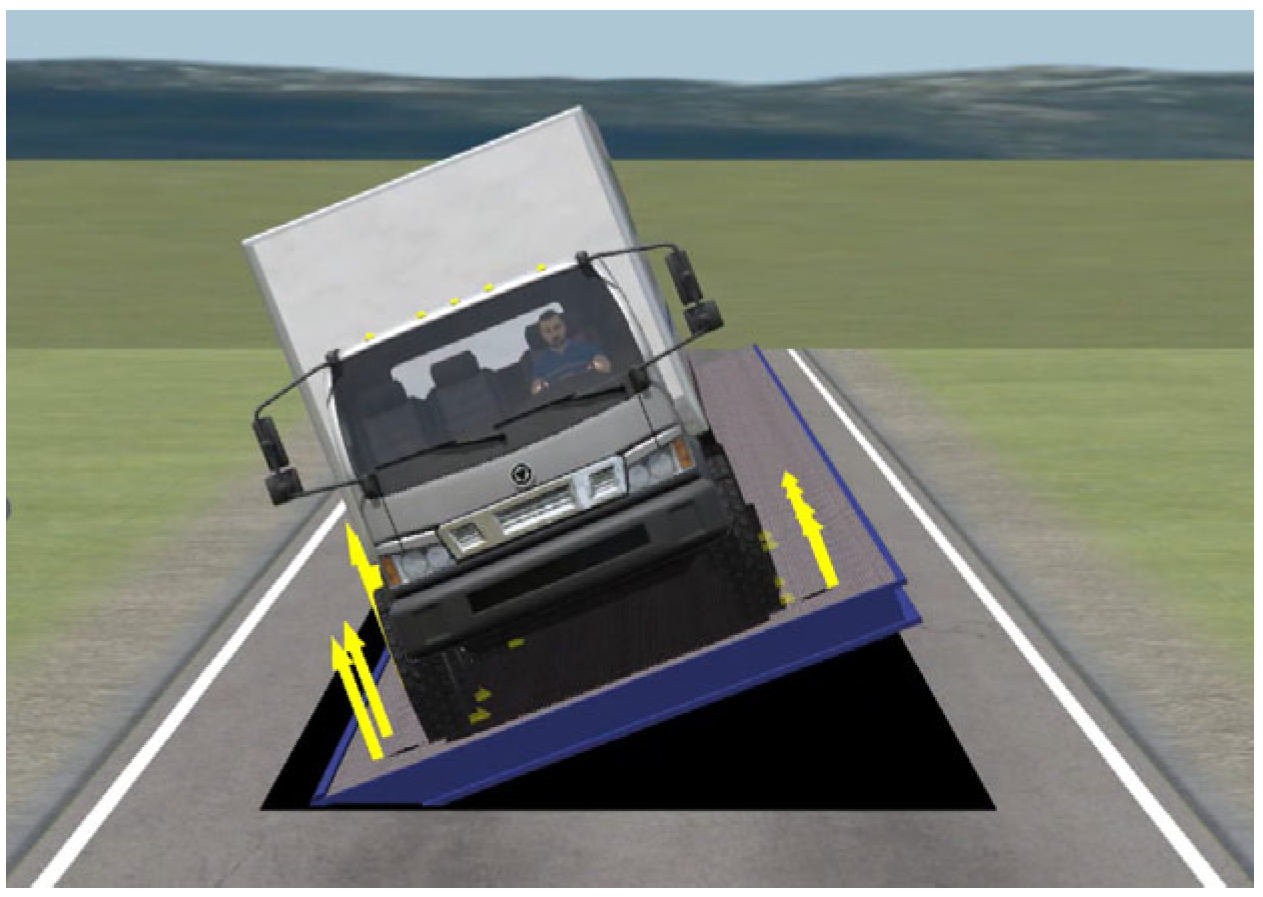
2.1. Maximum Safe Slope Angle Test
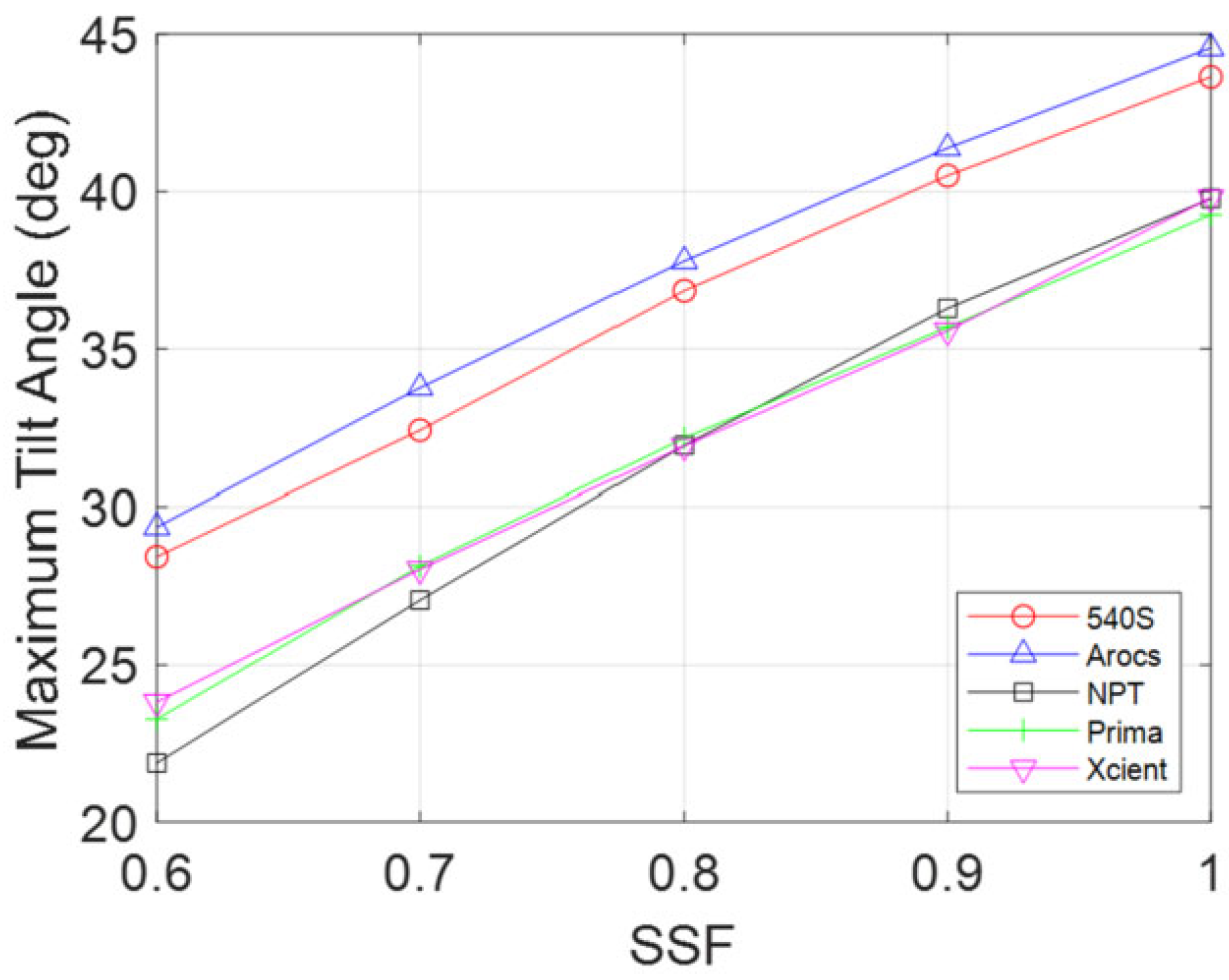
- 540S: Five-axle tractor truck;
- Arocs: Two-axle rigid truck;
- New Power Truck (NPT): Three-axle dump truck;
- Prima: Four-axle cargo truck;
- Xcient: Four-axle cargo truck.
Software and Hardware Setup
- TruckSim 2021 for vehicle dynamic simulation;
- MATLAB R2023a with Simulink for data processing;
- TensorFlow 2.11 for machine learning model training;
- Hardware: Intel i9-12900K CPU, NVIDIA RTX 3080 GPU, 64GB RAM;
- Operating System: Windows 11 Pro.
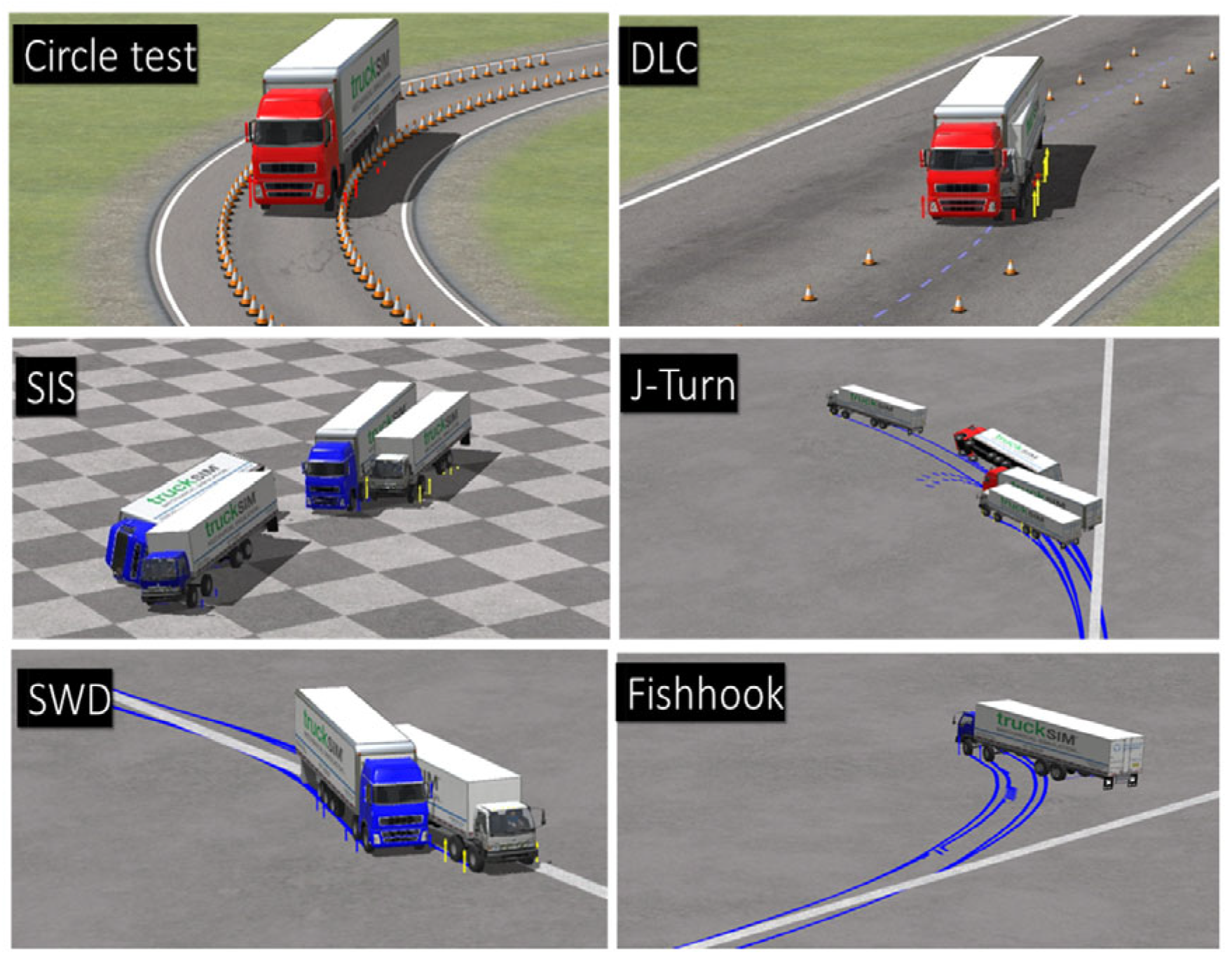
2.2. Test Evaluation Scenarios
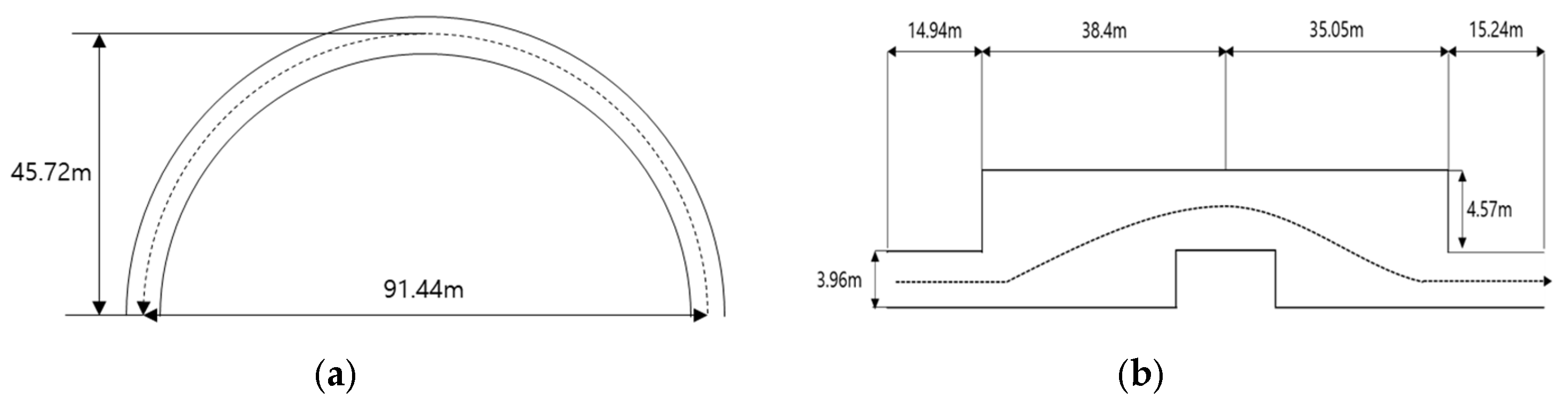
2.2.1. Circle Test
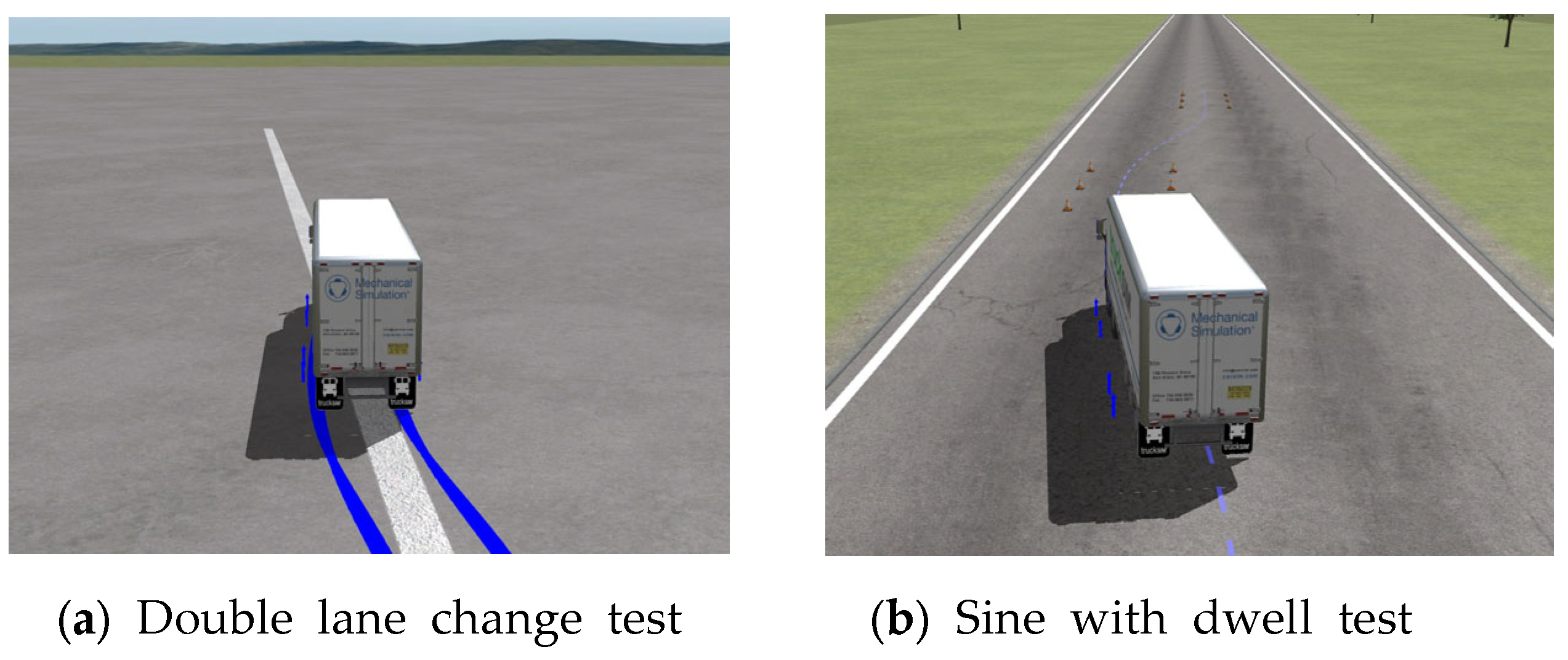
2.2.2. Double Lane Change (DLC)
2.2.3. Slowly Increasing Steer (SIS)
2.2.4. J-Turn
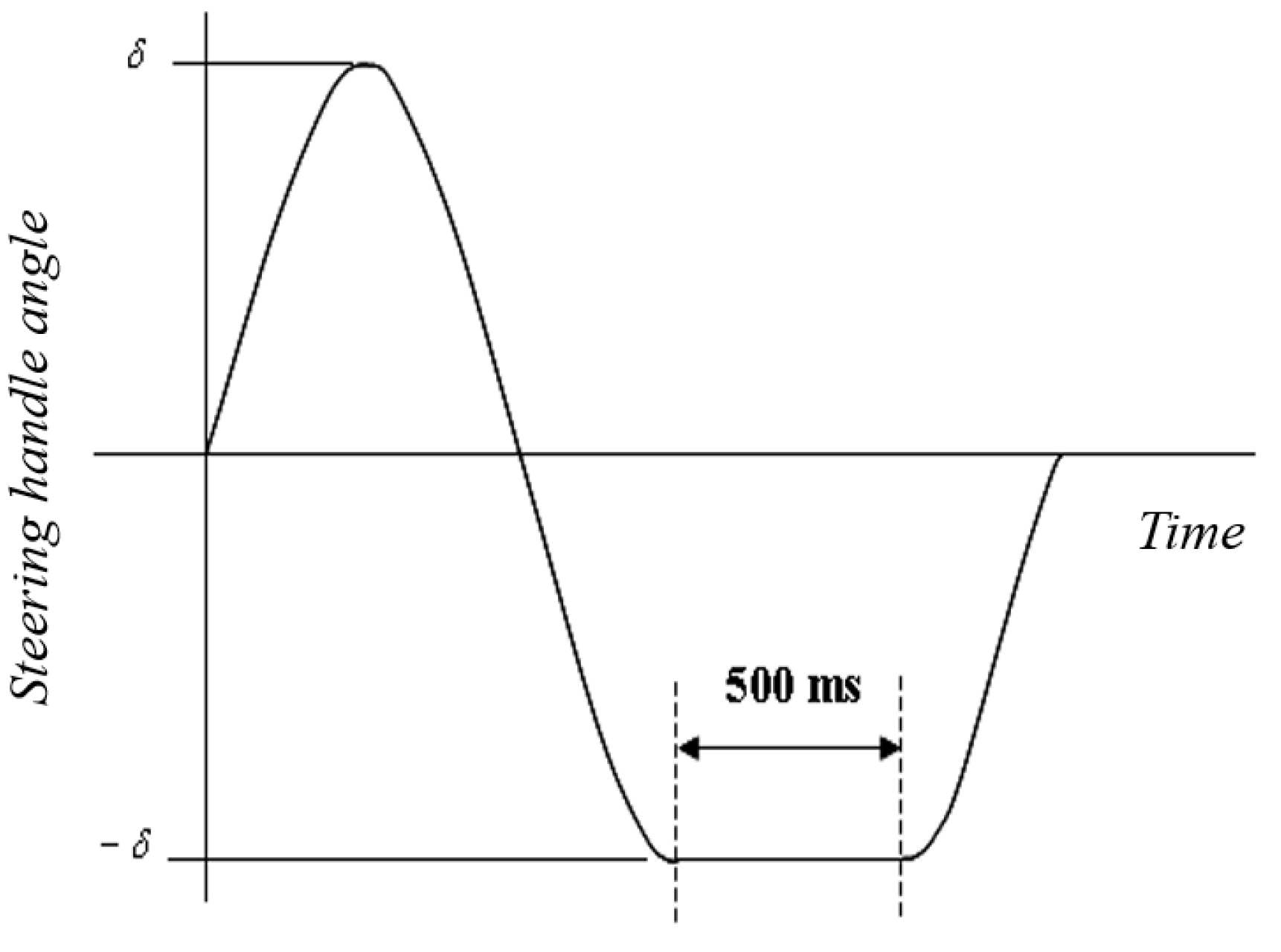
2.2.5. Sine with Dwell (SWD)
2.2.6. Fishhook
2.2.7. Simulation Conditions
2.2.8. Methodological Contribution
2.3. Machine-Learning-Based Driving Simulation Scenarios
2.3.1. Machine Learning Dataset Generation
- Low-speed: 40 km/h;
- Medium-speed: 50–70 km/h (variable);
- High-speed: 80.5 km/h.
2.3.2. Machine Learning Model Development
- Input: curvature and lateral acceleration;
- Sequence input layer (10 time steps);
- LSTM layer with 50 units;
- Dropout layer (dropout rate = 0.2);
- Fully connected output layer;
- Optimizer: Adam;
- Loss Function: mean squared error (MSE);
- Epochs: 50;
- Batch Size: 32;
- Training-validation-testing split: 70%-15%-15%.
3. Results
3.1. Relationship Between Maximum Safe Tilt Angle and SSF
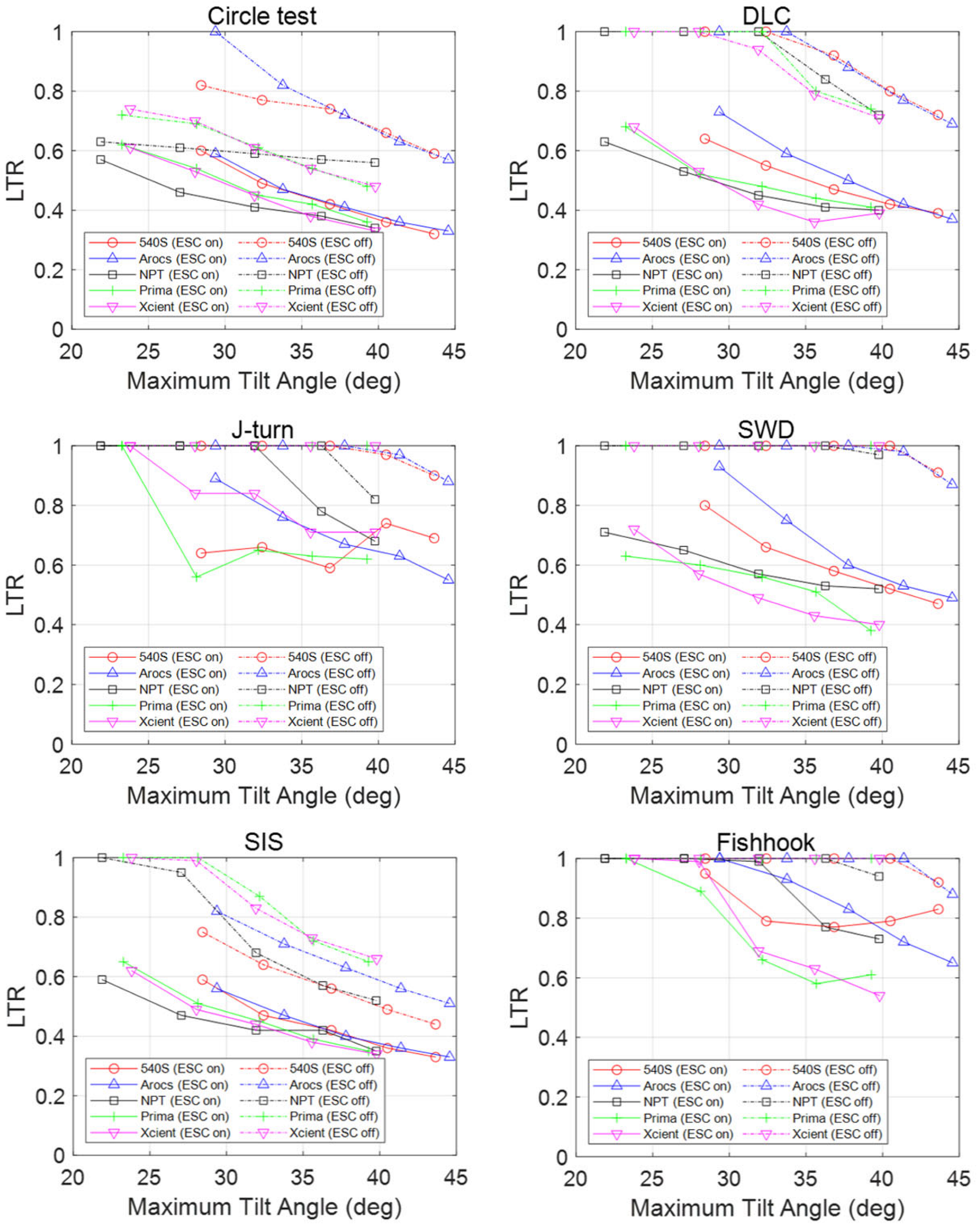
3.2. Dynamic Stability Test Results for Heavy Trucks
- Circle test: In the circle test, all vehicles except for the ESC-disabled Arocs successfully maintained stability without rolling over, although some models came close to rolling but recovered their posture. The effect of ESC installation was observed in the maximum LTR difference, ranging from 0.06 to 0.35.
- DLC (double lane change) test: In the DLC test, all ESC-disabled vehicles exceeded a maximum safe tilt angle of 30–33°, leading to rollovers in all cases. However, with ESC enabled, no vehicles rolled over. The ESC system reduced the peak LTR from Equation (4) by 0.32–0.52. Compared to the circle test, even vehicles with high stability exhibited more significant differences depending on the presence of ESC, while vehicles with lower stability showed even greater improvements with ESC activation.
- SIS (slowly increasing steer) test: Similar to the previous tests, the SIS test showed that higher maximum safe tilt angles corresponded to lower peak LTR values. Like the DLC test, ESC-disabled models with lower maximum safe tilt angles either rolled over or experienced significant wheel lift, even if a full rollover did not occur. However, fewer vehicles rolled over in the SIS test compared to the DLC test, and the average LTR values were generally lower. The ESC system reduced the maximum LTR by 0.11–0.52.
- J-turn test: In the J-turn test, most ESC-disabled models rolled over, with only a few high-tilt-angle models maintaining stability. Even among ESC-enabled models, some lower-stability vehicles still experienced rollovers. Additionally, certain high-SSF models exhibited higher maximum LTR values due to differences in ESC activation timing based on vehicle stability characteristics.
- SWD (sine with dwell) test: In the SWD test, most ESC-disabled models rolled over. Among the five models that did not roll over, some exhibited wheel lift in certain tests, and three models recorded LTR values above 0.87. In contrast, all ESC-enabled models successfully avoided rollovers, and vehicles with higher maximum safe tilt angles exhibited increased stability.
- Fishhook test: The fishhook test results were similar to the SWD test, where most ESC-disabled models experienced rollovers. Among the five models that did not roll over, some experienced wheel lift, and two models recorded LTR values above 0.88. In ESC-enabled models, vehicles with a maximum safe tilt angle exceeding 30° generally did not roll over. However, their peak LTR values were mostly above 0.6, indicating lower stability compared to other test scenarios.
3.3. Machine Learning Results for Rollover Prediction
4. Discussion and Limitations
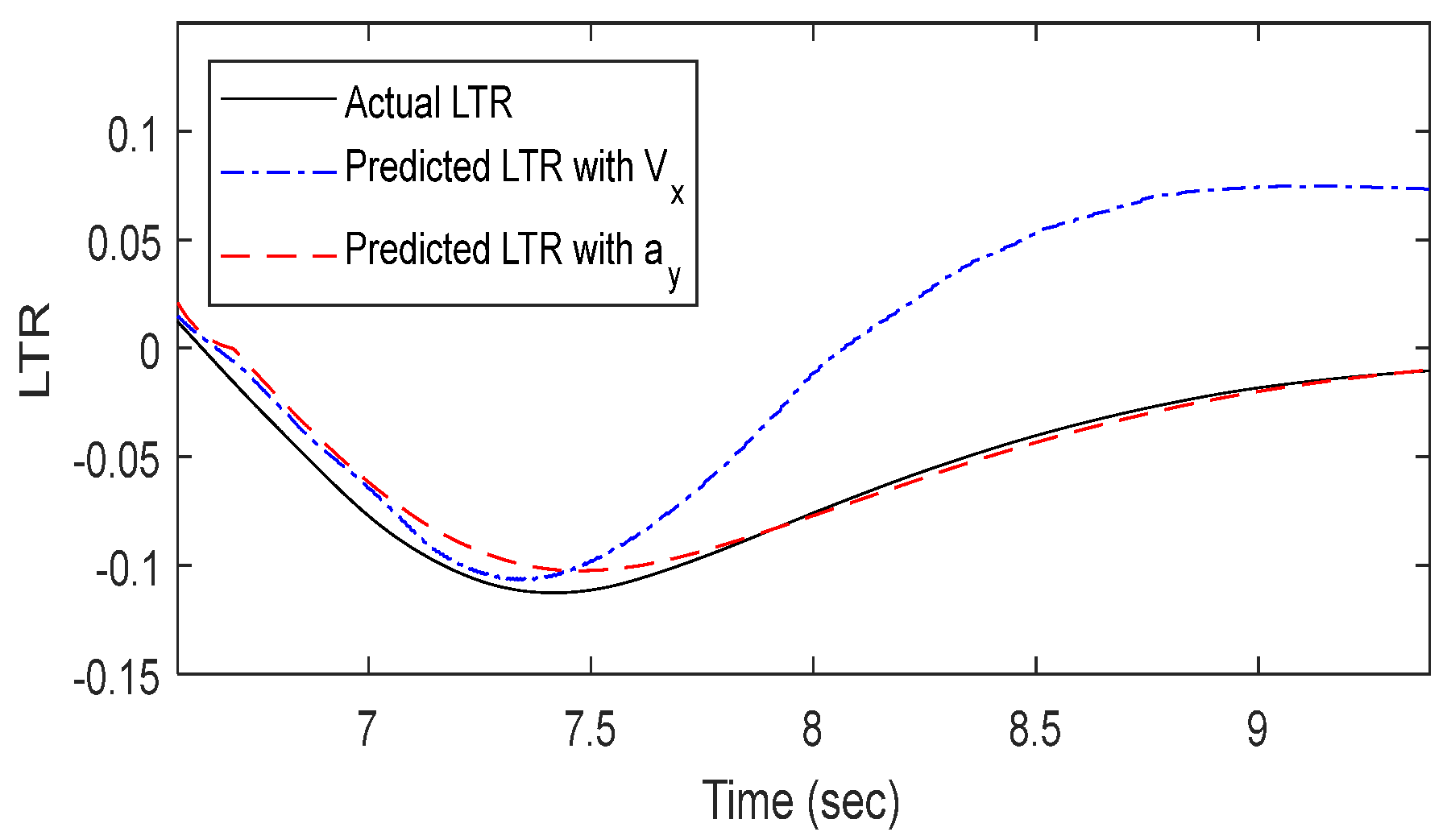
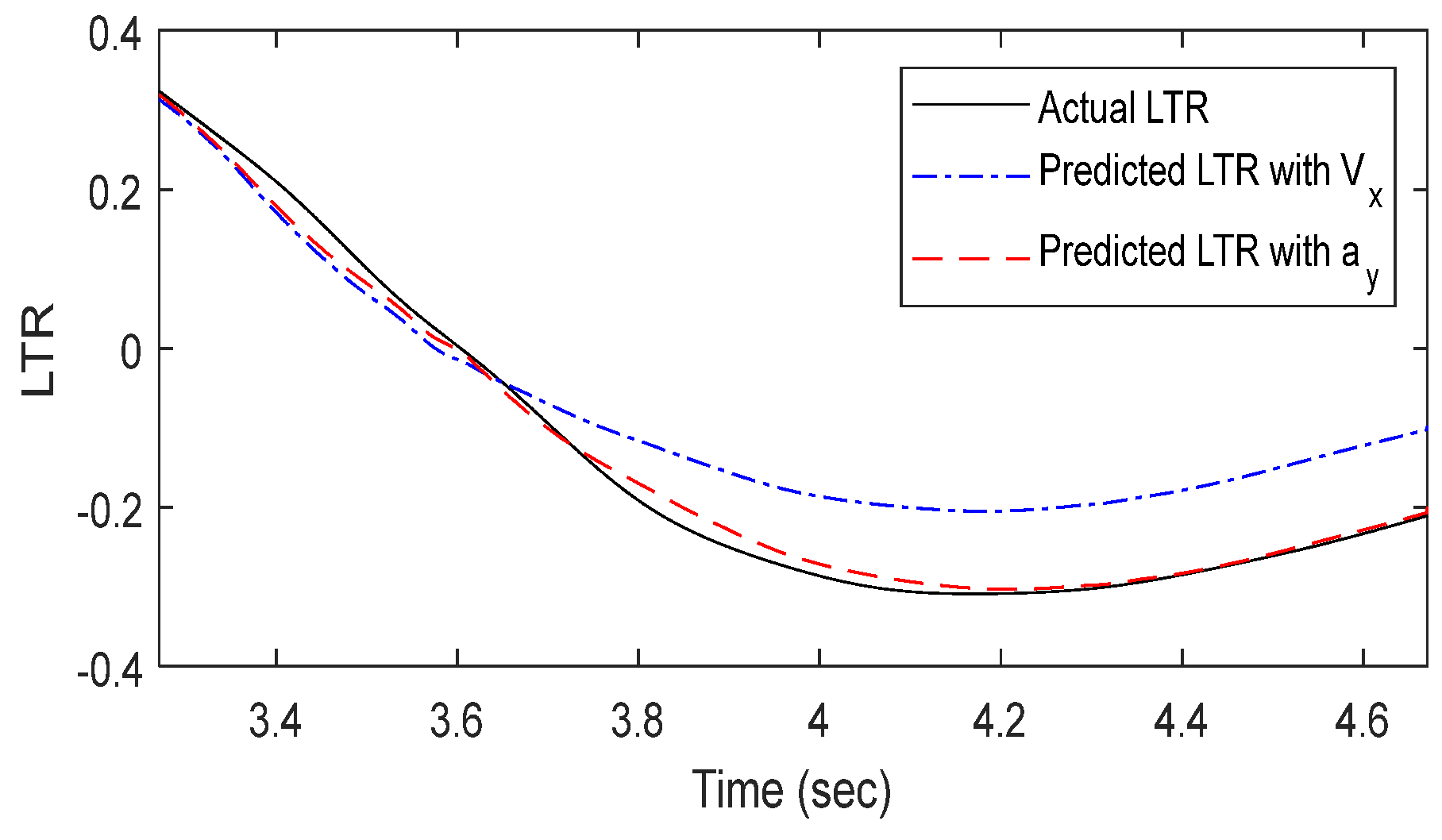
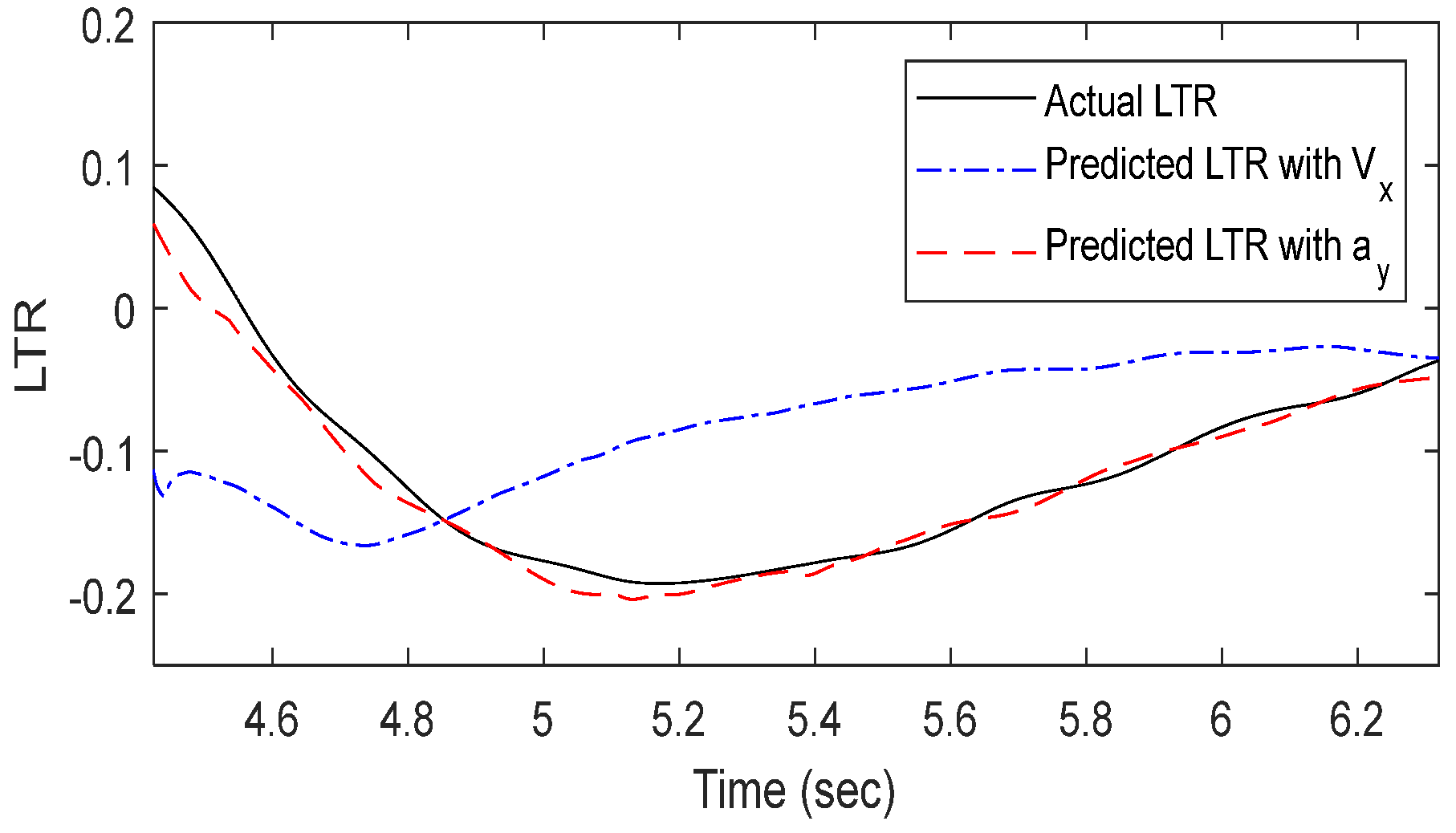
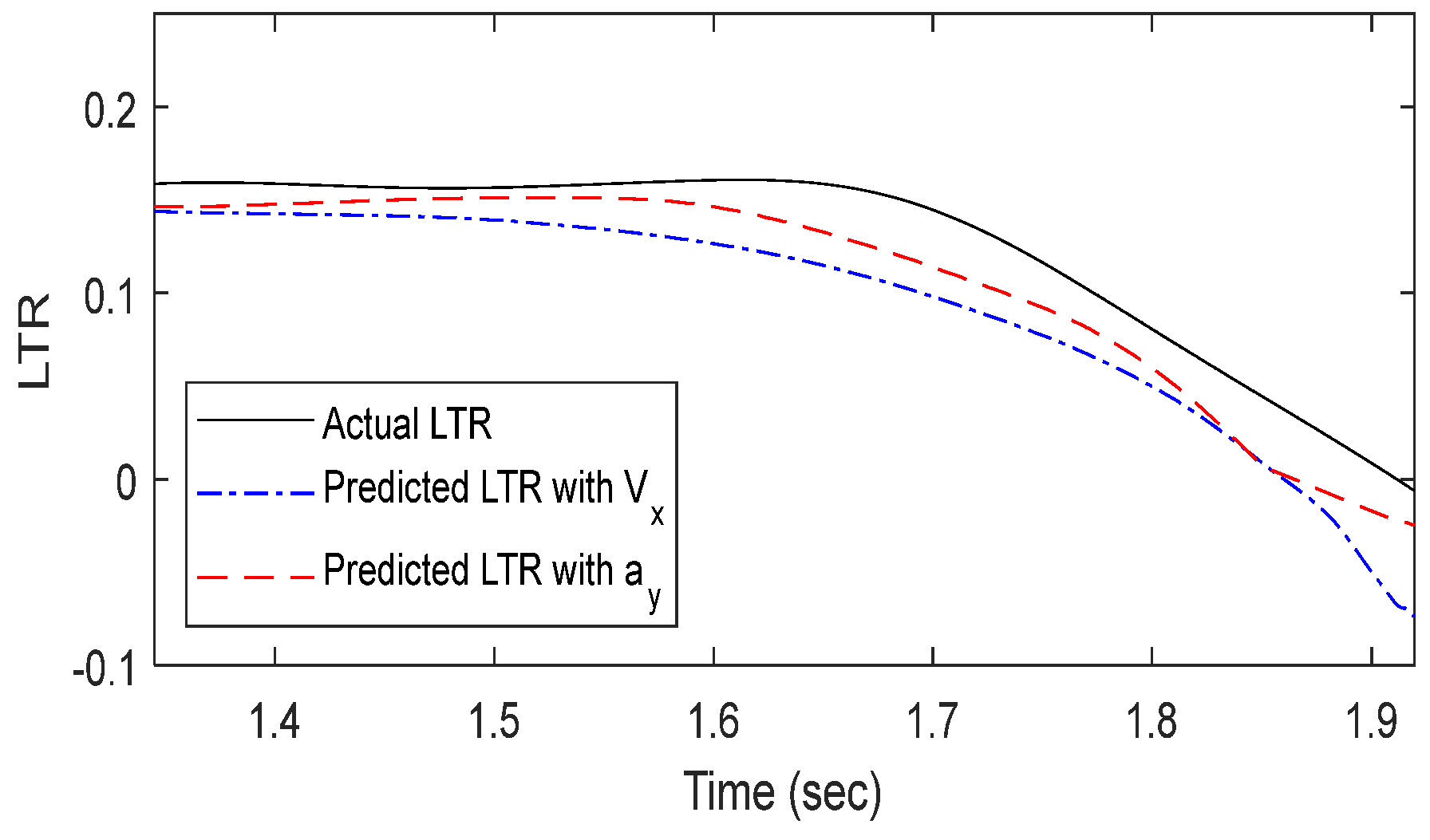
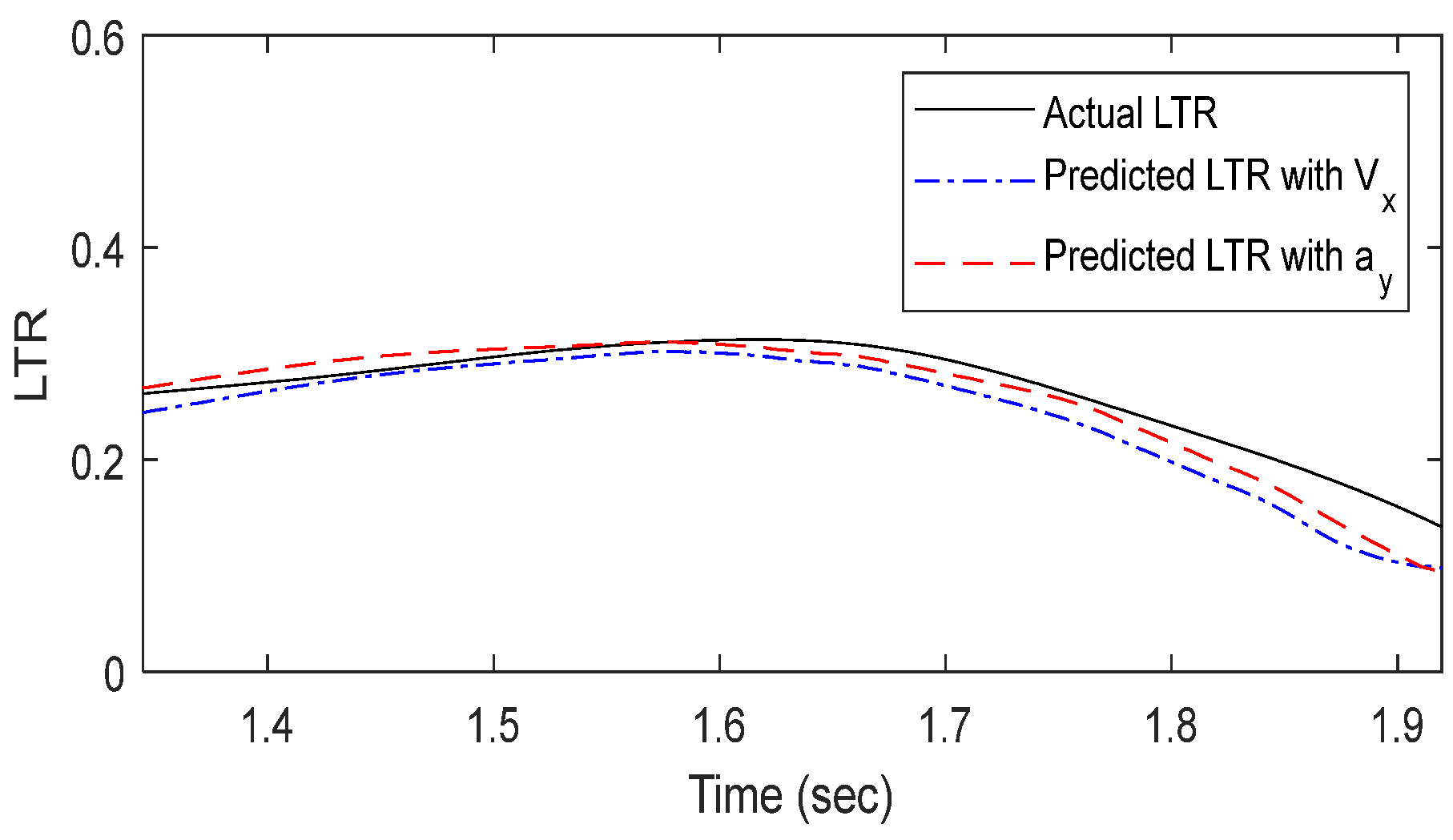
4.1. Rollover Safety Prediction Using Curvature and Speed
4.2. Prediction of Rollover Safety Using Curvature and Lateral Acceleration
4.3. Accuracy Comparison Between Velocity-Based and Lateral-Acceleration-Based Predictions
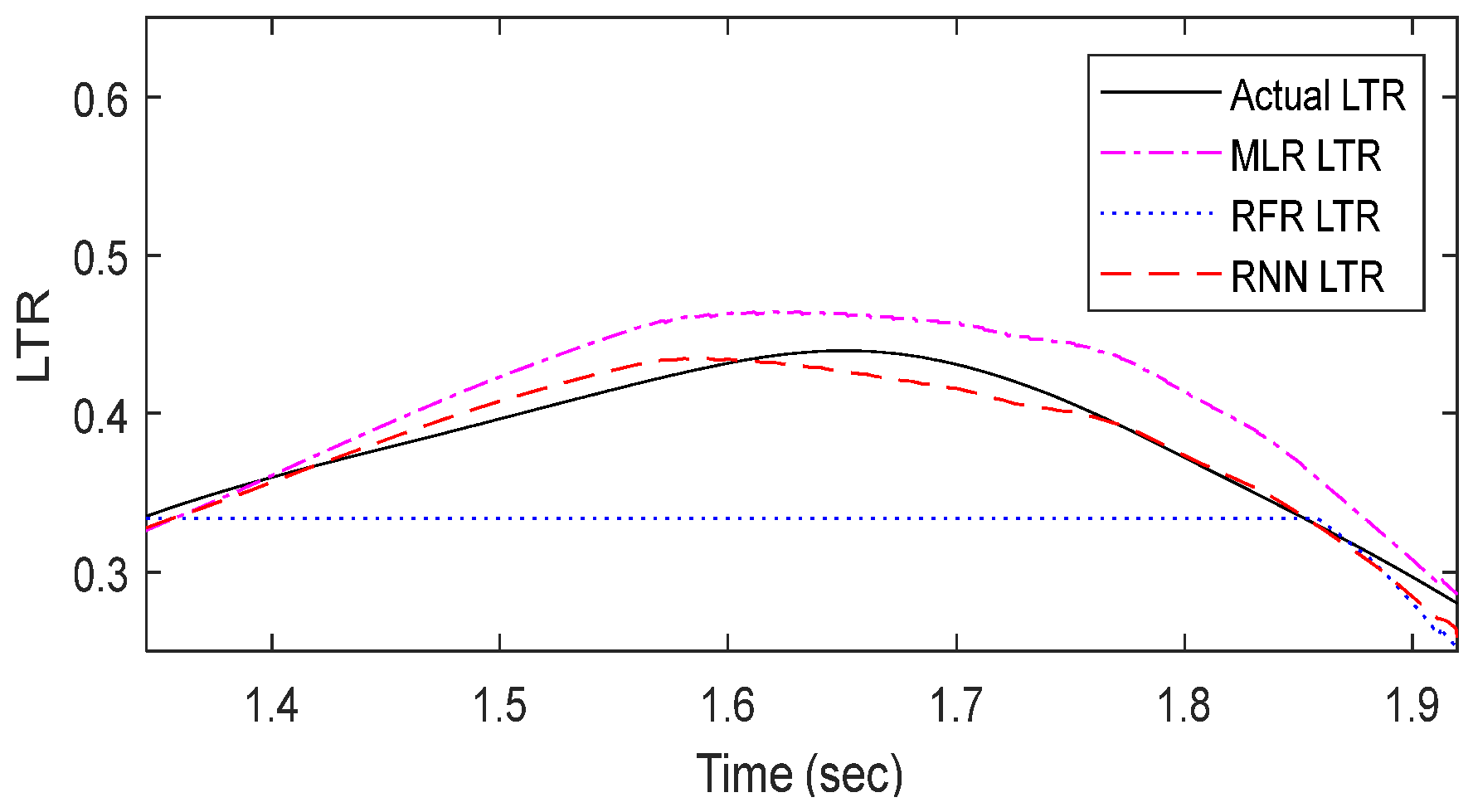
4.4. Comparison of Machine Learning Model Performance
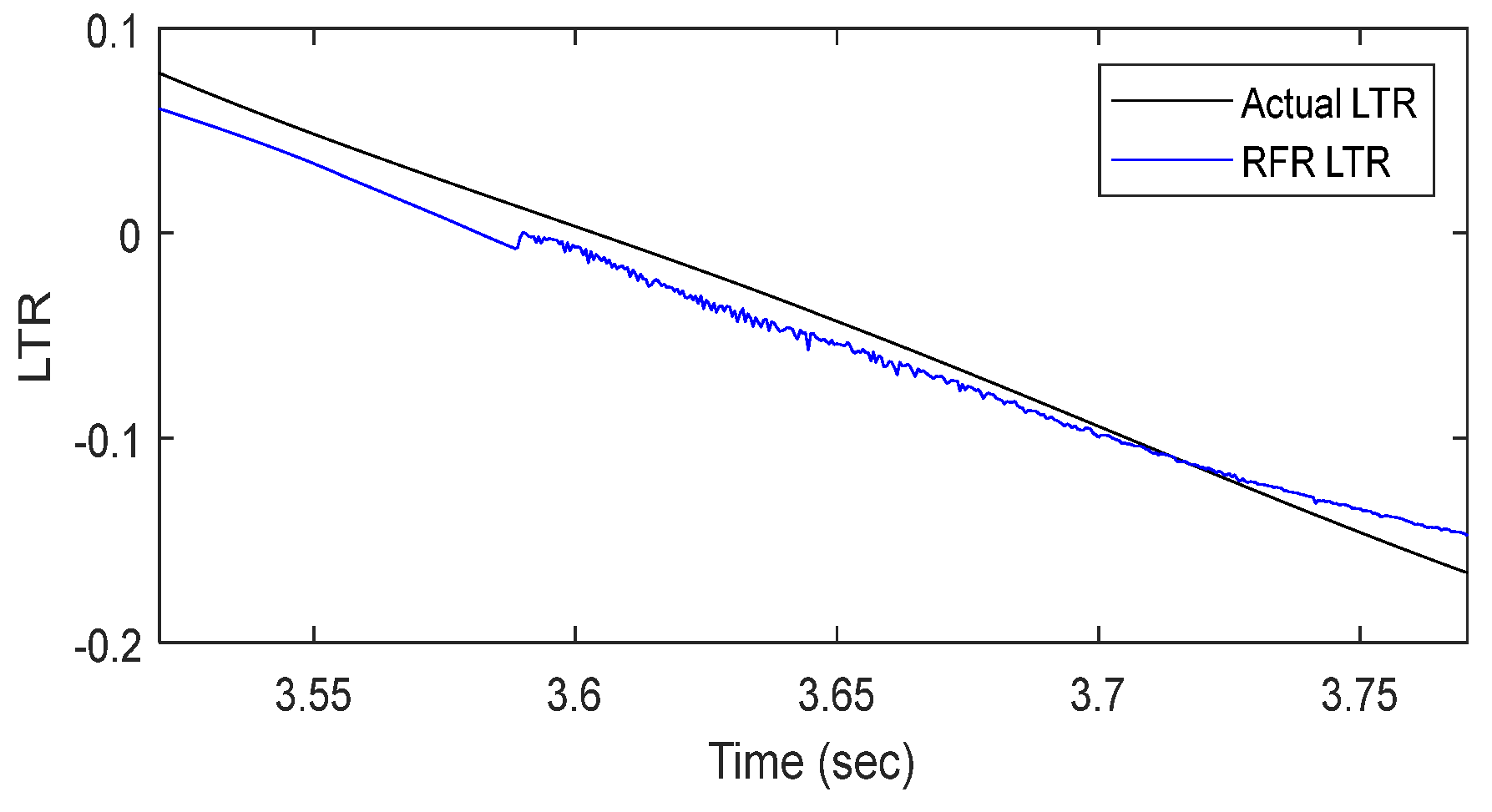
4.5. Error Analysis and Model Performance
- Underestimation of LTR during rapid steering reversals.
- Lag effects due to insufficient time window size for capturing delayed load transfer dynamics.
- Outliers when wheel lift occurred at very low lateral acceleration magnitudes (indicating model overfitting to typical cases).
4.6. Limitations
- Simulation-based data: All models were trained and tested exclusively on simulation outputs. Real-world validation is required to assess robustness under diverse road conditions and vehicle aging effects.
- Simplified vehicle dynamics: Tire and suspension models were simplified; tire wear, road surface variations (e.g., wet or icy conditions), and load shifts were not explicitly modeled.
- Limited vehicle diversity: Although five vehicle types were analyzed, further expansion to include buses, tankers, and specialty vehicles is necessary for broader applicability.
- Temporal window constraints: The 10-time-step sequence window may be insufficient for certain high-speed maneuvers. Dynamic window sizing could be explored.
- Generalizability to different environments: Current models assume standard dry road conditions. Performance under adverse weather or non-uniform terrain remains unknown.
4.7. Future Work
- Collecting experimental data from full-scale vehicle tests to validate the machine learning models.
- Integrating sensor noise models to evaluate real-world performance.
- Exploring hybrid models combining physics-based simulations with data-driven learning.
- Investigating model explainability to ensure safer integration into autonomous control systems.
5. Conclusions
5.1. Effects of the Maximum Safe Roll Angle on the Dynamic Stability of Heavy Trucks
5.2. Simulation-Based Driving Data Generation and Performance Verification of a Machine Learning Model for Predicting Truck Rollover Stability
- The LTR index during truck operation can be reliably predicted based on the intended driving path and vehicle speed.
- Transforming raw input variables—specifically vehicle speed and path curvature—into lateral acceleration significantly enhanced the prediction accuracy of the machine learning model.
- The proposed LTR prediction model offers the potential to compute optimal driving speeds in real time, thereby improving rollover risk management during operation.
- The trained RNN models offer real-time rollover risk estimation capabilities, potentially enabling dynamic route planning and speed control for autonomous trucks.
- Latency issues are minimal due to lightweight RNN architectures, but further optimization is required for deployment on embedded platforms.
- Interpretability remains a challenge; future work must focus on explainable AI techniques to ensure transparency and regulatory acceptance in safety-critical systems.
- Sensor noise and real-world environmental variability must be accounted for during system integration.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LTR | lateral load transfer ratio |
| TTR | time to rollover |
| MLR | multiple linear regression |
| CNN | convolutional neural network |
| RNN | recurrent neural network |
| LSTM | long short-term memory |
References
- Wang, D.; Gao, L.; Lan, Z.; Li, W.; Ren, J.; Zhang, J.; Zhang, P.; Zhou, P.; Wang, S.; Pan, J.; et al. An intelligent self-driving truck system for highway transportation. Front. Neurorobot. 2022, 16, 843026. [Google Scholar] [CrossRef] [PubMed]
- Korean National Police Agency. 2023 Traffic Accident Statistics. Report No.132002; Korean National Police Agency: Seoul, Republic of Korea, 2023. [Google Scholar]
- Hong, M.; Choi, G.; Kim, M. A Worst Vehicle Stability Evaluation Method for Heavy Duty Commercial Vehicles Using an Optimization Technique. Trans. KSAE 2019, 27, 721–726. [Google Scholar] [CrossRef]
- Forkenbrock, G.J.; Garrott, W.R.; Heitz, M.; O’Harra, B.C. An experimental examination of J-turn and fishhook maneuvers that may induce on-road, untripped, light vehicle rollover. SAE Trans. 2003, 112, 1112–1127. [Google Scholar]
- Kim, S.S. Prediction of ABS Braking Di stance using Simulation Technique. In Proceedings of the 2017 KSAE Annual Conference, Yeosu Expo, Yeosu, Republic of Korea, 15–17 November 2017; pp. 573–577. [Google Scholar]
- Kim, J.W.; Cho, J.H. Augmented Forward Collision Warning System Based on Prediction of Vehicle Braking Distance. JKIIT 2018, 16, 21–28. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: Berlin, Germany, 2011; pp. 15–240. [Google Scholar]
- Antonio, T.; Dimauro, L.; Velardocchia, F.; Paciullo, G.; Velardocchia, M. An Intelligent Predictive Algorithm for the Anti-Rollover Prevention of Heavy Vehicles for Off-Road Applications. Machines 2022, 10, 835. [Google Scholar] [CrossRef]
- Chao, P.P.; Zhang, R.Y.; Wang, Y.D.; Tang, H.; Dai, H.L. Warning model of new energy vehicle under improving time-to-rollover with neural network. Meas. Control. 2022, 55, 1004–1015. [Google Scholar] [CrossRef]
- Nie, X.; Min, C.; Pan, Y.; Li, K.; Li, Z. Deep-Neural-Network-Based Modelling of Longitudinal-Lateral Dynamics to Predict the Vehicle States for Autonomous Driving. Sensor 2022, 22, 2013. [Google Scholar] [CrossRef] [PubMed]
- Koysuren, K.; Keles, A.F.; Cakmakci, M. Online Parameter Estimation using Physics-Informed Deep Learning for Vehicle Stability Algorithms. In Proceedings of the 2023 American Control Conference (ACC), San Diego, CA, USA, 31 May–2 June 2023. [Google Scholar]
- Marumo, R.; Molwane, O.B.; Agarwal, A. Numerical Analysis of Rear Spoilers in Improving Vehicle Traction; Springer Proceedings in Materials: Berlin, Germany, 2020; pp. 165–173. [Google Scholar]
- Agarwal, A.; Batista, R.C.; Gurung, A. Smart Electric and Hybrid Vehicles: Analyzing the Impact of Bumper Height on Pedestrian Injuries Using Explicit Dynamics; CRC Press: London, UK, 2024; pp. 57–89. [Google Scholar]
- Huston, R.L.; Kelly, F.A. Another look at the static stability factor (SSF) in predicting vehicle rollover. Int. J. Crashworthiness 2022, 19, 567–575. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Tractor Semi-Trailer Stability Objective Performance Test Research—Roll Stability; National Highway Traffic Safety Administration: Washington, DC, USA, 2011.
- National Highway Traffic Safety Administration. FMVSS No. 136, Electronic Stability Control Systems on Heavy Vehicles; Office of Regulatory Analysis and Evaluation: Washington, DC, USA, 2012.
- ISO 3888-1:2018; Passenger Cars—Test Track for a Severe Lane-Change Manoeuvre—Part 1: Double-Lane Change. International Organization for Standardization (ISO): Geneva, Switzerland, 2018.
- Ministry of Land, Infrastructure and Transport. Performance and Standards for Automobiles and Automobile Parts Enforcement Regulations. Appendix 1, No. 50, Electronic Stability Control (ESC) Test; Ministry of Land, Infrastructure and Transport: Sejong City, Republic of Korea, 2024.
- Hochreiter, S.; Schmidhuber, J. Long Short-term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | 540s | Arocs | NPT | Prima | Xcient |
|---|---|---|---|---|---|
| Number of axles | 5 | 2 | 3 | 4 | 4 |
| Overall length (mm) | 12,900 | 11,600 | 7595 | 12,820 | 11,575 |
| Overall width (mm) | 2495 | 2495 | 2495 | 2490 | 2490 |
| Overall height (mm) | 3995 | 3200 | 3130 | 3305 | 3345 |
| Wheelbase (mm) | 8850 | 6600 | 4590 | 7600 | 7430 |
| Front track width (mm) | 2065 | 2100 | 2050 | 2165 | 2080 |
| Rear track width (mm) | 1830 | 1850 | 1850 | 1850 | 1845 |
| Curb weight (kg) | 12,155 | 7015 | 11,100 | 13,270 | 12,800 |
| Vehicle Type | SSF | Test Evaluation Method | ESC |
|---|---|---|---|
| 540s Arocs NPT Prima Xcient | 0.6 0.7 0.8 0.9 1.0 | Circle DLC SIS J-turn SWD Fishhook | On Off |
| Type | Description | Characteristics |
|---|---|---|
| Layers | Sequence input LSTM Fully connected | 10 50 1 |
| Main hyperparameters | Optimizer Epochs Dropout rate Batch size | adam 50 0.2 32 |
| Type | Description | Units |
|---|---|---|
| Input | Road curvature Longitudinal speed Lateral acceleration | - km/h m/s2 |
| Output | Lateral-load transfer ratio | - |
| Type | Speed (km/h) | Mean Squared Error | |
|---|---|---|---|
| Model A | Model B | ||
| DLC | 40 | 0.0041295 | 0.0000168 |
| 80.5 | 0.0070954 | 0.0001994 | |
| 50~70 | 0.0033708 | 0.0001438 | |
| SWD | 40 | 0.0011664 | 0.0004339 |
| 80.5 | 0.0005428 | 0.0000835 | |
| 50~70 | 0.0006962 | 0.0003175 | |
| Type | Mean Squared Error | |
|---|---|---|
| DLC | SWD | |
| MLR | 0.0003264 | 0.0007587 |
| Random forest | 0.0003354 | 0.0044262 |
| RNN | 0.0001994 | 0.0000835 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-S. Machine-Learning-Based Rollover Risk Prediction for Autonomous Trucks: A Dynamic Stability Analysis. Appl. Sci. 2025, 15, 4886. https://doi.org/10.3390/app15094886
Lee H-S. Machine-Learning-Based Rollover Risk Prediction for Autonomous Trucks: A Dynamic Stability Analysis. Applied Sciences. 2025; 15(9):4886. https://doi.org/10.3390/app15094886
Chicago/Turabian StyleLee, Heung-Shik. 2025. "Machine-Learning-Based Rollover Risk Prediction for Autonomous Trucks: A Dynamic Stability Analysis" Applied Sciences 15, no. 9: 4886. https://doi.org/10.3390/app15094886
APA StyleLee, H.-S. (2025). Machine-Learning-Based Rollover Risk Prediction for Autonomous Trucks: A Dynamic Stability Analysis. Applied Sciences, 15(9), 4886. https://doi.org/10.3390/app15094886