1. Introduction
With the deployment of huge satellite groups, constellation networking has ushered in new challenges. In particular, orbit-control technology and orbit-maintenance technology have become the constraints of large-scale constellation networking control. Determining how to efficiently, economically, and stably control large-scale constellation initialization and constellation configuration maintenance in low orbit has become a challenging problem that needs to be focused on and solved in the field of large-scale constellation orbit control. Constellation orbit control involves aspects such as control technology, control methods, and optimal control. Among them, the selection of the orbit operation control strategy will directly affect the constellation networking efficiency and the constellation operation cost, and further affect the geometric integrity, structural stability, and service availability of the constellation system. Large-scale constellation networking in low orbit is mainly based on constellation service characteristics and satellite orbit characteristics, which are crucial for completing the establishment and maintenance of the overall constellation geometry. The main tasks of a constellation network are the deployment and maintenance of the constellation orbital plane and the satellite phase in the orbital plane.
In terms of drag, Finley et al. proposed a phase space method for accomplishing differential drag maneuvers, based on the relative phase drift rate and collision avoidance of the satellite constellation. In this method, orbit modification was the only means of collision avoidance of the satellite constellation [
1]. Foster et al. proposed a differential drag control method for a large fleet of propulsionless satellites deployed in the same orbit and used the simulated annealing algorithm to minimize the required phasing time given the available control authority [
2]. He et al. proposed a station-keeping strategy to compensate for perturbations due to the atmospheric drag, in which the errors in the orbital measurements and control as well as in the estimation of the semimajor axis decay rate were taken into account [
3]. Ulybyshev proposed a new linear quadratic controller for satellite constellations, which helped to increase the formation-keeping accuracy for the low-altitude satellite constellations affected by atmospheric drag [
4].
In terms of low thrust, Li et al. applied Hamiltonian theory to transform the low-thrust station-keeping optimization problem into a two-point boundary value problem, which was used for the station-keeping strategy of satellites with low thrust [
5]. Fan et al. established a long-term perturbation model for relative motion based on a Hamiltonian model. By analyzing the long-term evolution process of the BDS medium Earth orbit (MEO) constellation over 10 years, the validity of the proposed analytical perturbation compensation calculation method was verified [
6].
In terms of perturbations, Li et al. employed perturbation analysis to formulate the relative perturbation motion equations for constellation orbits, elucidating the orbital perturbation principles and the overall drift characteristics of relative perturbation motion. In addition, they established the governing equations for both absolute and relative motion in the context of constellation orbital perturbation compensation control [
7,
8]. Hu et al. conducted an in-depth analysis of the orbital evolution process influenced by Earth’s oblateness perturbation and satellite orbit deviations. Their findings indicated that Earth’s oblateness perturbation resulted in the general drift of the constellation structure, while satellite orbit deviations played a critical role in determining the stability of the constellation geometry [
9,
10]. Oliveira et al. accounted for three-body and
perturbations based on the integral over time of the undesired perturbation forces. This approach helped to map orbits that had a high potential to require less fuel consumption for station-keeping maneuvers [
11]. In terms of constellation configuration maintenance, Wang et al. proposed a method of calculating the major semi-axis deviations indirectly from the change in the relative phase and deduced the evolution of the relative phase with a limit cycle control method, which met the requirements of long-term orbit preservation [
12]. Jiang et al. analyzed the orbital perturbations and configurational phase drift of constellation satellites, and they presented a numerical differential correction method for constellation configurations [
13].
Chu et al. employed a relative configuration preservation method to minimize the average drift deviation and implemented a free-segment-maintenance strategy. This approach effectively decreased the control frequency and achieved orderly and decentralized constellation management in both temporal and spatial dimensions [
14]. Sun et al. derived a formula to calculate the maintenance control amount for the semi-major axis by considering the phase drift caused by the attenuation of the satellite’s orbital semi-major axis. They also analyzed the maintenance control rules for satellites with varying surface mass ratios during periods of both low and high solar activity. The orbital altitude changes of the on-orbit satellites in the Starlink constellation have verified that this method can effectively maintain the satellite phase within the desired interval and ensure a stable and consistent control frequency [
15,
16]. Yang et al. developed a second-order consistent control methodology for maintaining a constellation’s relative configuration, which effectively compensated for the configuration drift caused by variations in the surface mass ratios. This method effectively compensates for the configuration drift caused by the changes in the ratio of the cross-sectional area to the mass [
17,
18].
Li et al. introduced a dual-bias strategy to significantly mitigate the relative drift. The initial bias was derived by fitting the relative drift of the constellation in its unbiased state. Subsequently, the second bias was obtained by fitting the residual relative drift after applying the first bias. By superimposing these two bias components, the overall relative drift was substantially reduced [
19]. Chen et al. employed the principle of satellite initial parameter bias compensation to model and adjust for the cumulative effects of various perturbations, thereby mitigating long-term orbital deviations caused by these factors and preserving the stability of the constellation configuration [
20]. Chen et al. conducted an in-depth analysis of the laws of motion of satellites and the evolution characteristics of constellation configurations under perturbations. They proposed a relative phase-maintenance strategy anchored on a reference satellite, which effectively reduced the complexity and frequency of the constellation configuration maintenance, conserved fuel, and shortened the orbit-control time [
21]. Hu et al. developed a relative phase-maintenance strategy for a constellation based on dynamic adjustments to this reference orbit. By computing the relative phase deviation and the rate of change for each satellite with respect to the reference orbit, they ensured that the phase deviations of all the satellites remained within allowable limits [
22].
Liu et al. developed a method for calculating the phase-holding period and changes in the semi-major axis using limit cycle theory. They subsequently proposed a high-precision phase-holding method grounded in limit cycle principles [
23]. Qi et al. utilized high-precision latitude angle data obtained from satellite-based global navigation satellite system (GNSS) receivers to approximate the changes in the relative semi-major axis during constellation configuration maintenance. This approach aimed to fulfill the requirements for future large-scale constellation-independent high-precision configuration maintenance [
24]. Arnas et al. designed a novel method for two-dimensional lattice-preserving flower constellations that maintained the initial distribution of satellites and the initial symmetries over time, i.e., relative station keeping. Moreover, the amount of fuel required to achieve the absolute station keeping with this procedure was very low. Relative and absolute station-keeping methods for the maintenance of a constellation were established for
perturbations [
25].
For low Earth orbit (LEO) near-circular satellites, the nominal semi-major axis and orbital inclination of satellites within the same orbital plane in a constellation should be consistent. The perturbation and drift patterns of the orbital elements for these constellations are also uniform. However, in practical engineering applications, initial deviations in the capture of satellite orbital elements (such as pre-bias in the orbital inclination) can occur, which may be negligible but will cause the constellation configuration to drift over time. When the phase angle deviation exceeds the permissible theoretical threshold, adjustments to the satellite phase angle are required. Therefore, maintaining the constellation’s station position primarily involves maintaining the satellite phase.
At present, the research objects of satellite positioning are mostly independent satellites or small satellite constellations, and there is relatively little research on the station keeping of large-scale low-orbit constellations. At the same time, the configuration maintenance of large-scale constellations is more stringent, and the cost constraints are more prominent. Therefore, based on the station keeping of a single satellite or a small-scale satellite constellation, this paper conducts research on the configuration maintenance strategy of large-scale low-orbit constellations. This article proposes a large-scale constellation phase-keeping loop control method based on a fixed reference star and a relative phase control method for large-scale constellations based on a dynamic reference star, thus providing the necessary conditions for the station keeping of large-scale low-orbit constellations. At the same time, a phase-keeping loop control scheme combining semi-major axis overshoot control and passive control and a relative phase maintenance scheme based on dynamic reference satellites are designed. During the initialization and configuration maintenance processes of large-scale low-orbit constellations, most satellites use continuous and efficient low thrust to complete the orbital maneuvering tasks for constellation networking. For example, during the constellation initialization stage, tasks such as raising the satellite orbital altitude and adjusting the eccentricity are carried out, and during the constellation configuration maintenance stage, tasks like maintaining the satellite phase angle are performed.
This paper is structured as follows.
Section 2 presents the analysis of the constellation station-keeping methods. In
Section 3 and
Section 4, the absolute and relative control models for constellations are established, the phase-drift and phase-keeping rules of satellites are analyzed, and the corresponding station-keeping strategies are evaluated and validated. In
Section 5, the simulation results are presented to assess the impacts of various control strategies on the constellation availability and operational costs, with a focus on minimizing costs. Finally,
Section 6 presents the conclusions and further discussion.
2. Constellation Station Maintenance Analysis
At present, the low-orbit large-scale constellation orbit-control strategy still faces many challenges, mainly in the following aspects [
6].
Compared with MEO constellations, LEO constellations have larger numbers of satellites and larger scales, and the orbital elements of satellites in different orbital planes are quite different, so the initial deployment degrees of LEO constellations are more complicated. For example, currently, the number of satellites in orbit of the Starlink system exceeds several thousand, according to the publicly available website
www.space-track.org (accessed on 22 October 2024). These satellites are deployed on multiple orbital planes in a process that roughly follows a complex orbital maneuver (or docking orbit) from the initial orbit to the operational orbit. Due to the differences in orbital elements, such as the initial orbital altitude, right ascension, and phase difference of satellites with the same and different orbital planes, the constellation initialization control strategy should be designed from the top overall level. The maintenance of the constellation configuration should be comprehensively considered from the existing satellite–Earth measurement and control. As a result, the initialization of the constellation deployment and the maintenance of the constellation configuration are more complicated.
- 2.
The main perturbative effects and drift rules of the constellation are not assimilated.
Compared with MEO constellations, due to the differences in the main perturbation forces, the orbital drift characteristics of the low-orbit constellations are different. For example, an initial deviation of the semi-major axis of an LEO satellite on the order of 100 m causes a phase difference of nearly 36° over the course of a year, while an MEO satellite’s phase difference is only 1.5°. Due to the relatively low orbital altitude of the satellite, the atmospheric drag is greatly affected, and the orbital altitude of the satellite decreases continuously with the atmospheric drag. The orbital deviations of the initial orbital elements of the satellite and the capture error of the ground measurement and control system cause the cumulative drift of the phase angle, resulting in the continuous divergence of the overall geometry of the constellation. Therefore, satellite orbit deviations and perturbation forces are important factors affecting the constellation coverage characteristics and mission realization. To compensate for the satellite orbital altitude attenuation caused by atmospheric drag, the control laws, control methods, and control strategy analysis of the satellite relative phase angle in the same orbital plane and the right ascension of different orbital planes are also different.
- 3.
Constellation orbit-control mode and orbit-control technology are more integrated.
The control and maintenance technologies and the control methods of medium- and high-orbit constellations mainly include perturbation compensation methods based on the average orbit root number and the constellation-configuration numerical differential correction method based on the instantaneous root number. Compared with MEO constellations, large-scale low-orbit constellations have large numbers of satellites, low orbital altitudes, and large cumulative influences of initial deviations and capture error perturbations. Therefore, the stable and safe operation requirements of large-scale low-orbit constellations are more stringent, and constellation geometry maintenance tasks occur more frequently. There are still many theoretical problems to be studied and many engineering application problems to be solved if the existing orbit-control and orbit-maintenance technology, control methods, and control modes of medium- and high-orbit constellations or small low-orbit satellite constellations are extended to large-scale low-orbit satellite constellations.
In this context, this paper summarizes and compares the literature on constellation orbit-control strategies from around the world. The existing research results, existing problems, and areas to be further studied are analyzed, and the geometric configuration maintenance law, orbit-control methods, and constellation orbit-control strategies of large-scale low-orbit constellations are studied. The aim is to realize the optimal design of large-scale constellation orbit control in low orbit and to provide a reference for the future engineering planning and control operation of the Internet of Constellations.
2.1. Contents of Station Keeping
Ideally, for low-orbit near-circular orbit satellites, the nominal orbital semi-major axes and orbital inclinations of satellites in the same orbital plane within a constellation should be consistent. If only the perturbation of the Earth‘s non-spherical term and atmospheric drag are considered, the perturbation and drift laws of the orbital elements of low-orbit constellation satellites are also consistent. However, in general practical engineering, there are initial deviations in the capture of satellite orbital elements (among them, for the orbital inclination, according to practical engineering applications, the method of pre-biasing is generally adopted, and the initial deviation amount can be ignored). Under the influence of the Earth‘s non-spherical term and atmospheric drag, the decay of the satellite‘s semi-major axis and the phase change will be inconsistent, which in turn causes the constellation configuration to drift.
After the constellation configuration is established, under the influence of atmospheric drag and the perturbation of the Earth‘s non-spherical term, the deviation of the satellite‘s semi-major axis will lead to the inconsistent decay of the satellite‘s semi-major axis. Within an orbital period, the differences in the running speeds of satellites will cause the drift of the phase angle. When the deviation of the phase angle exceeds the allowable theoretical boundary value, the satellite‘s phase angle needs to be adjusted. Therefore, the content of constellation station keeping is the maintenance of the satellite‘s phase.
2.2. The Content of Satellite Constellation Station Keeping
The phase angle deviations between satellites in a constellation need to be calculated for constellation station holding. Therefore, a satellite needs to be selected as the reference basis for constellation phase holding. There are generally two methods for selecting the reference basis of constellation station position keeping. One method is to select a fixed satellite (the first satellite of the first orbital plane or the nominal orbit of the constellation in general) among all the satellites of the constellation as the reference basis and then calculate the phase angle difference between the other satellites and the reference satellite [
15]. The other method is to dynamically select any satellite from all the satellites of the constellation as the reference basis and calculate the phase angle difference between the remaining satellites and the reference satellite [
21].
In the constellation, a designated satellite (typically the first satellite in the initial orbital plane or nominal orbit of the constellation) is chosen as the reference star. This satellite, denoted as , serves as the phase control basis for the constellation, while the reference satellite remains uncontrolled, with its standard phase denoted as . If the actual phase of any other satellite in the constellation is , then represents the phase difference between satellite and the reference star, where denotes the designed theoretical value of the phase difference between satellites and . When the deviation in the phase angle exceeds the permissible limits, it becomes necessary to implement phase-maintenance control for satellite .
- 2.
Dynamic-reference-star method.
The procedure for referencing the dynamic reference star is as follows. A satellite is dynamically chosen as the reference star from all the satellites in the constellation. The phase angle difference between other satellites and the reference star is denoted as , where represents the designated value of the nominal phase difference between satellite and satellite . When the phase angle deviation exceeds the permissible boundary value, it becomes necessary to implement phase-maintenance control for satellite .
2.3. Analysis of Satellite Constellation Phase Evolution
The Earth’s non-spherical perturbation terms can be divided into zonal harmonics and tesseral harmonics. Among them, the influence of the first term of the zonal harmonics is much greater than that of other terms. Therefore, this paper only considers the perturbation influence of this term. As a conservative force, the Earth’s non-spherical perturbation does not have a long-term perturbation effect on the orbital elements
of a circular orbit, but will only cause periodic fluctuations [
21].
In the formula, is the drift rate of the right ascension of the ascending node, is the Earth’s non-spherical perturbation term, is the drift rate of the phase angle, is the radius of the Earth, is the semi−latus rectum, is the average angular velocity of the satellite’s motion, is the orbital inclination, and is the eccentricity.
As the orbital altitude gradually increases, the drift rate of the phase angle shows a significant linear decrease. Therefore, the change in the satellite’s orbital altitude plays a major role in the process of the phase angle drift.
Ideally, for low-orbit satellites in near-circular orbits, the nominal orbital semi-major axes and orbital inclinations of satellites within the same orbital plane of the constellation should be consistent. If only the perturbations of the Earth’s non-spherical J2 term and atmospheric drag are considered, the perturbation and drift laws of the orbital elements of low-orbit constellation satellites are also consistent. However, for satellites in different orbital planes of the constellation, under the influence of the Earth’s non-spherical J2 term and atmospheric drag, the attenuation of the satellite’s semi-major axis and the laws of the phase change are inconsistent, so they need to be discussed separately. In view of this, the subsequent analysis of the evolution of the satellite phase is applicable only to the satellites within the same orbital plane of the low-orbit satellite constellation in near-circular orbits.
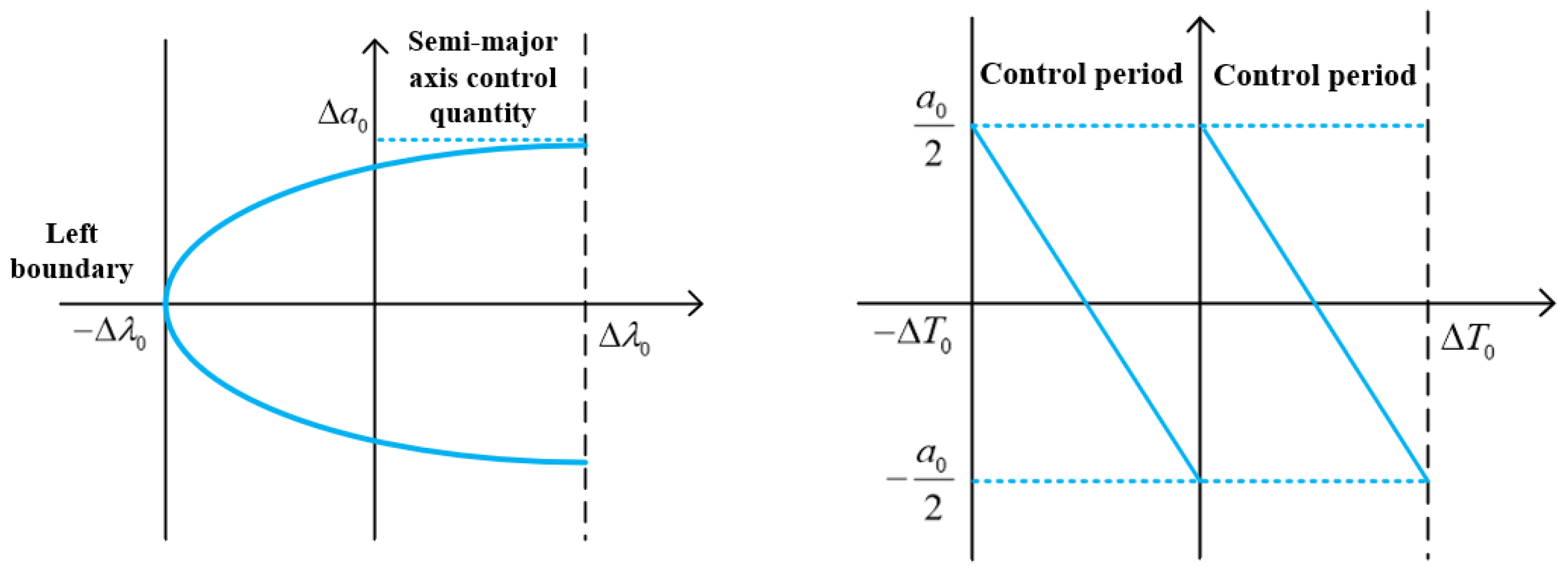
For low-orbit satellites in near-circular orbit, the attenuation of the orbital semi-major axis caused by atmospheric drag will cause a relative phase drift of the satellite. The relationship between the phase angle drift rate and the semi-major axis attenuation can be written as follows [
15]:
By integrating the above formula, the relative rate of change in the phase angle can be regarded as a function of the semi-major axis and the rate of change of the semi-major axis. The relationship between the phase angle drift and the semi-major axis attenuation is [
15].
where
is the amount of attenuation caused by atmospheric drag.
According to the phase calculation formula of the reference star,
When the phase deviation
of the satellite relative to the reference star exceeds the threshold value, the following condition is satisfied:
The orbit control of the satellite needs to be implemented.
4. Analysis of Position-Holding Strategy of Constellation Stations
The strategy of constellation station holding can be divided into two types: absolute station holding and relative station holding.
Absolute control means that each satellite in the constellation is controlled independently to keep it within a control range centered on the control reference satellite. The absolute control method is relatively mature and reliable. It is the same as the control method of a single satellite. It has a certain engineering application basis and is highly reliable for the constellation control system.
The launch of multiple satellites with one launcher is considered an example. After the satellite is in orbit, the control of the initial orbit acquisition is preliminarily completed based on the nominal orbit. The absolute control strategy is based on the orbit of the nominal constellation as a reference. By controlling the semi-major axis, inclination, and right ascension of a single satellite one by one, the constellation configuration can be established within a specified time limit. Due to the influence of various perturbations, the satellite will gradually deviate from the originally designed orbit during orbit operation, the safe positions between the satellites in the constellation will change, and the overall structure of the constellation will be destroyed. It is necessary to maintain the long-term and periodic orbit of the constellation to ensure the integrity of the constellation’s performance.
Considering the measurement errors and onboard control errors in the ground measurement and control system, the absolute control strategy is to control each satellite one by one. By improving the measurement accuracy of the semi-major axis, the average orbit-control period can be increased, and the number of orbit-control tasks during the lifetime can be reduced, thereby reducing the configuration maintenance frequency.
- 2.
Relative control strategy.
Relative control is to control the constellation globally, rather than independently controlling each satellite. The control target also changes from the absolute position of each satellite to the relative position between satellites to keep the configuration of the whole constellation unchanged within certain precision requirements.
Different from the absolute control strategy, the relative position-holding strategy requires a ground measurement and control system to conduct precise orbit determination and orbit prediction for the whole satellite network. Then, the reference orbit and control strategy of each satellite are calculated and combined with the relative control strategy. The relative control strategy occupies more ground satellite tracking telemetry and command (TT&C) resources, and the scheduling algorithm is more complex. At the same time, a relative control strategy requires high on-board autonomy. Considering Internet Constellation does not have the function of directly measuring the orbital parameters of adjacent satellites, it can only rely on the GNSS of the satellites to obtain precise orbital data and transmit it back to the ground control center through inter-satellite links and satellite-Earth mode.
A relative control strategy synthesizes the orbital perturbation deviation of the whole network satellite and only corrects the parts that affect the relative geometric configuration of the constellation. The propellant consumption, orbital control frequency, and control period are more advantageous than those of the absolute control strategy, but the control process is relatively complicated and the reliability is low.
- 3.
Comparison of absolute and relative control strategies.
The absolute holding strategy has the advantages of simple control, high reliability, and mature control methods. Due to the pressure on the ground measurement and control system, the absolute holding strategy requires fewer measurements and control resources. Before the relative control strategy is controlled, the reference track should be optimized, and the reference track parameters should be updated to reduce the control frequency, which is of high complexity and low reliability. The absolute phase control method is simple and mature, with high reliability. Relative phase control is more suitable for constellations with fewer satellites. Absolute phase control is recommended for large constellations.
Table 1 shows a detailed comparison of the control strategies.
4.1. Constellation Absolute-Station-Holding Strategy
Based on the relationship between the semi-major axis deviation and the phase deviation, as well as the calculation method of the limit cycle control period and the semi-major axis change, the absolute-phase-holding strategy of the satellite constellation is presented in this section. Absolute phase holding is a method for the autonomous phase holding control of a single satellite, and it is suitable for the absolute station holding of large low-orbit constellations. The control flow chart of the satellite absolute control strategy is shown in
Figure 2.
The control process of the satellite absolute control strategy is as follows:
The initial semi-major axis deviation relative to the reference star before satellite control and the corresponding initial phase angle deviation are obtained.
The high−precision orbit propagator (HPOP) model was used to extrapolate the satellite orbit’s average value of the semi-major axis and phase angle. The attenuation rate of the satellite’s average value of the semi-major axis was calculated by curve fitting the variations of the average value of the semi-major axis attenuation rate and the range of the phase angle drift ring .
Based on the average value of the semi-major axis attenuation rate and phase angle drift ring range , the semi-major axis deviation target value of the phase-holding orbit maneuver within a phase-holding period is calculated.
The change in the semi-major axis that maintains control is calculated: .
The disparity between and is calculated. If the disparity is less than the tolerance value (), the process proceeds to step 6; otherwise, the process returns to step 1 for iterative correction.
Orbit control (lifting or lowering the semi-major axis of the satellite) is carried out on the satellite at this moment to achieve the goal of satellite phase maintenance.
4.2. Relative Station Position-Keeping Strategy of Constellation
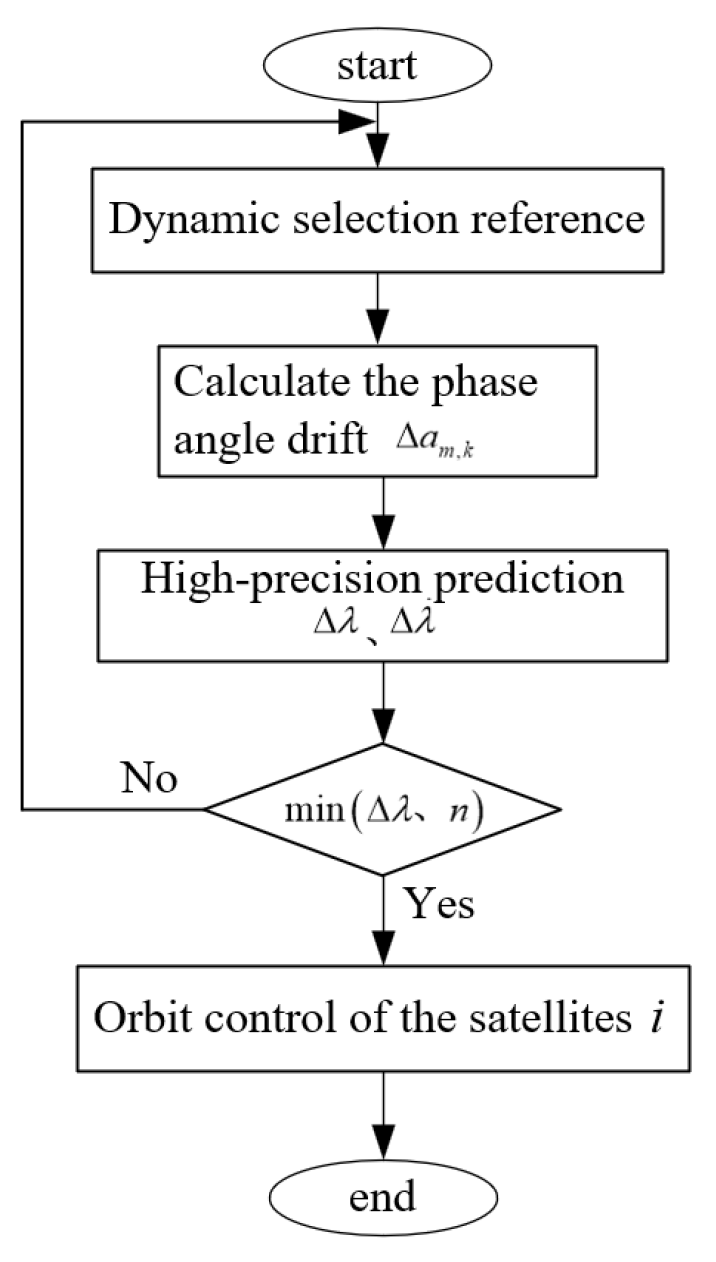
In this section, a relative phase control strategy based on a dynamic reference satellite is designed based on the method of referring to a dynamic reference star. The specific process is as follows. Any satellite in the constellation is dynamically selected as the reference star, and then the sum of the phase drifts of other satellites in the constellation and the reference satellite is calculated. The satellite with the minimum cumulative value of the phase angle drift and the minimum number of satellites to be controlled is selected as the control reference, and the relative station position maintenance of the constellation is carried out. The control flow chart of the satellite relative control strategy is shown in
Figure 3.
The control process of the relative phase-maintenance strategy based on a dynamic reference satellite is as follows:
All the satellites in the constellation are utilized as dynamic reference stars, and the phase angle drift of the other satellites relative to the reference satellite is computed. Here, , , and represent the designated nominal value of the phase difference between satellite k and satellite m.
The orbit extrapolation of a satellite in the constellation is carried out by a high-precision orbit forecaster to calculate the satellite phase deviation . With the change rate of the phase deviation , the phase angle summation () is selected. In addition, the number of phase maintenance satellites and the smallest satellite () should be used as the reference satellite.
Based on the reference satellite , orbit control is implemented for satellite to adjust its semi-major axis (raising or lowering) to alter the phase drift direction between the satellites and maintain the phase angle of the constellation.
According to the perturbation variational equation of the relative phase angle, the cumulative semi-major axis control quantity can be deduced as
where
is the maximum allowable drift of the phase difference,
is the phase drift time, and
is the absolute value of the semi-major axis deviation between the reference satellite and the control satellite.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}