
Ice Thickness Detection of Transmission Lines Based on Cross-Guide-UNet


Abstract
1. Introduction
- Dataset innovation: We developed an edge detection dataset specifically designed for ice-covered transmission lines. This dataset provides rich samples for model training.
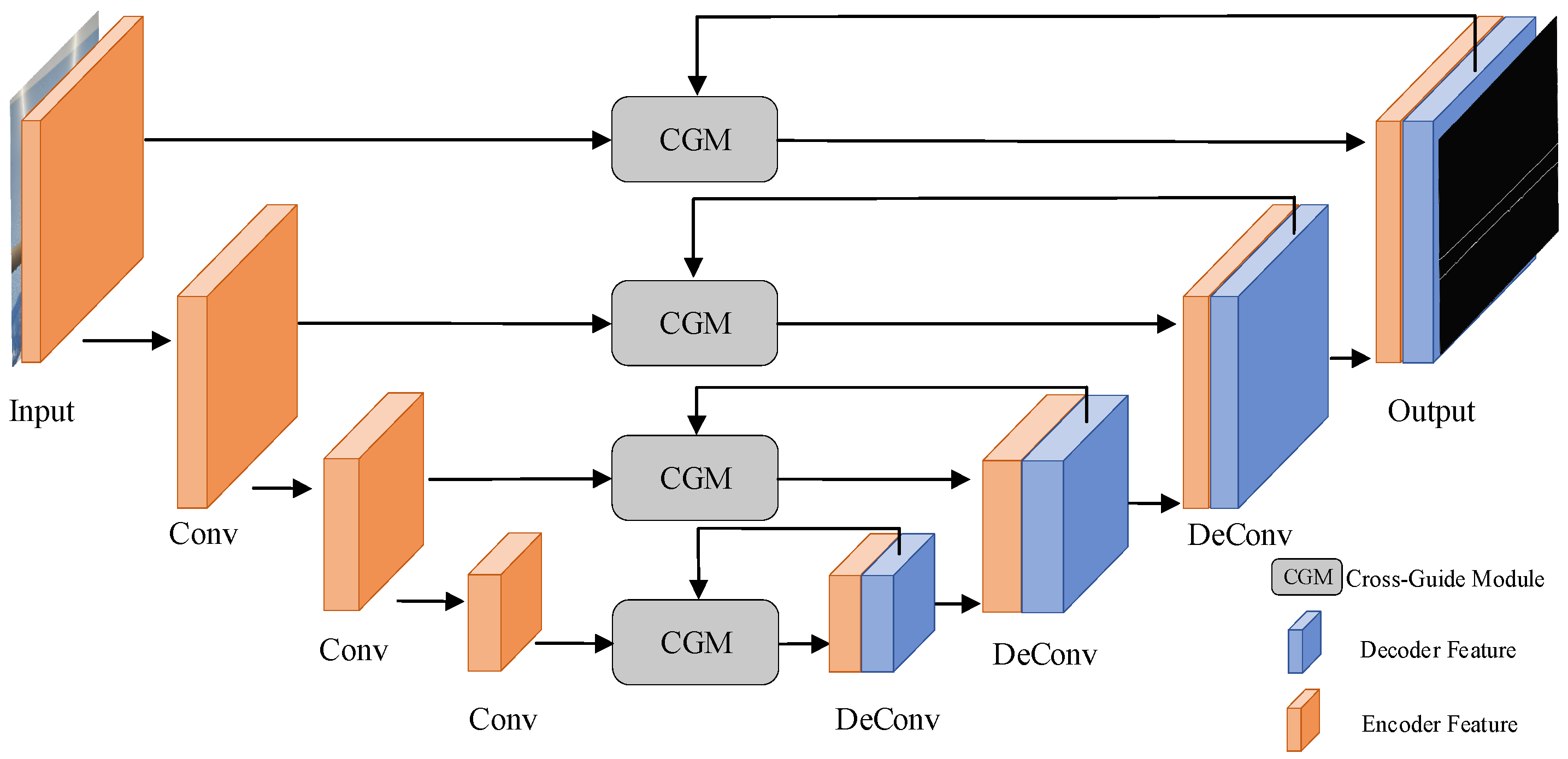
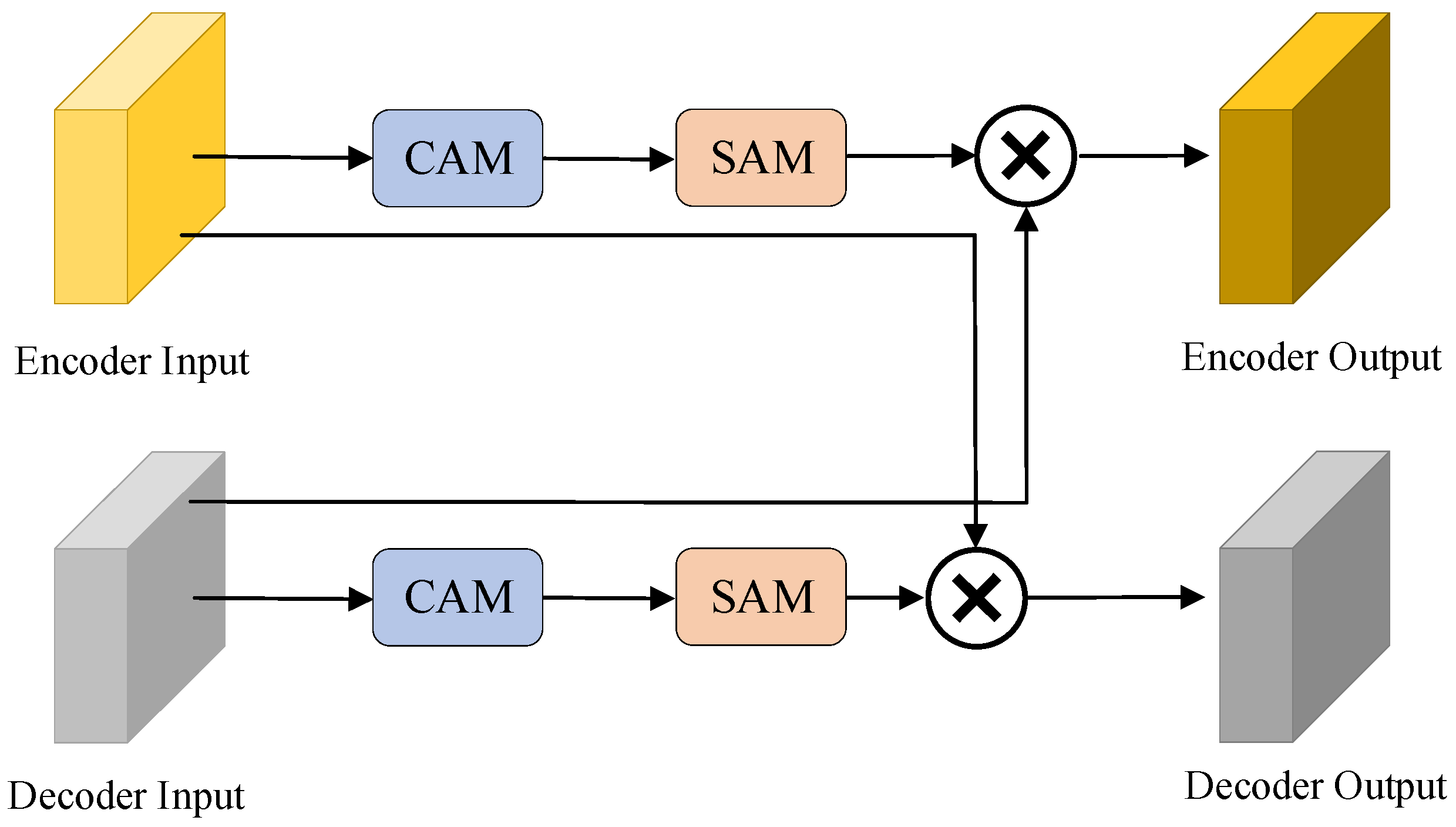
- Cross-guide module (CGM): In the CG-UNet algorithm, we innovatively introduced the cross-guide module. This module optimizes the upsampling process of images by introducing guidance information in the crosslayer connection between the encoder and decoder, thereby achieving high-precision edge restoration.
- Joint loss function: We designed a novel joint loss function that combines local and global information, significantly improving the model’s ability to discriminate pixels near edges. The design of this loss function makes our model more robust when dealing with easily confused pixels.
- Edge detection network with encoding and decoding structure: We designed an efficient encoding and decoding structure network for detecting ice thickness. The experimental results for the ice cover dataset show that the network can achieve an edge detection accuracy (ODS) of 0.934 and an edge recognition accuracy (OIS) of 0.938, with a thickness detection error controlled within 7.2%.
2. Related Works
3. Cross-Guide-UNet (CG-UNet)
3.1. Cross-Guide Module
3.1.1. Channel Attention
3.1.2. Spatial Attention
3.1.3. CGM
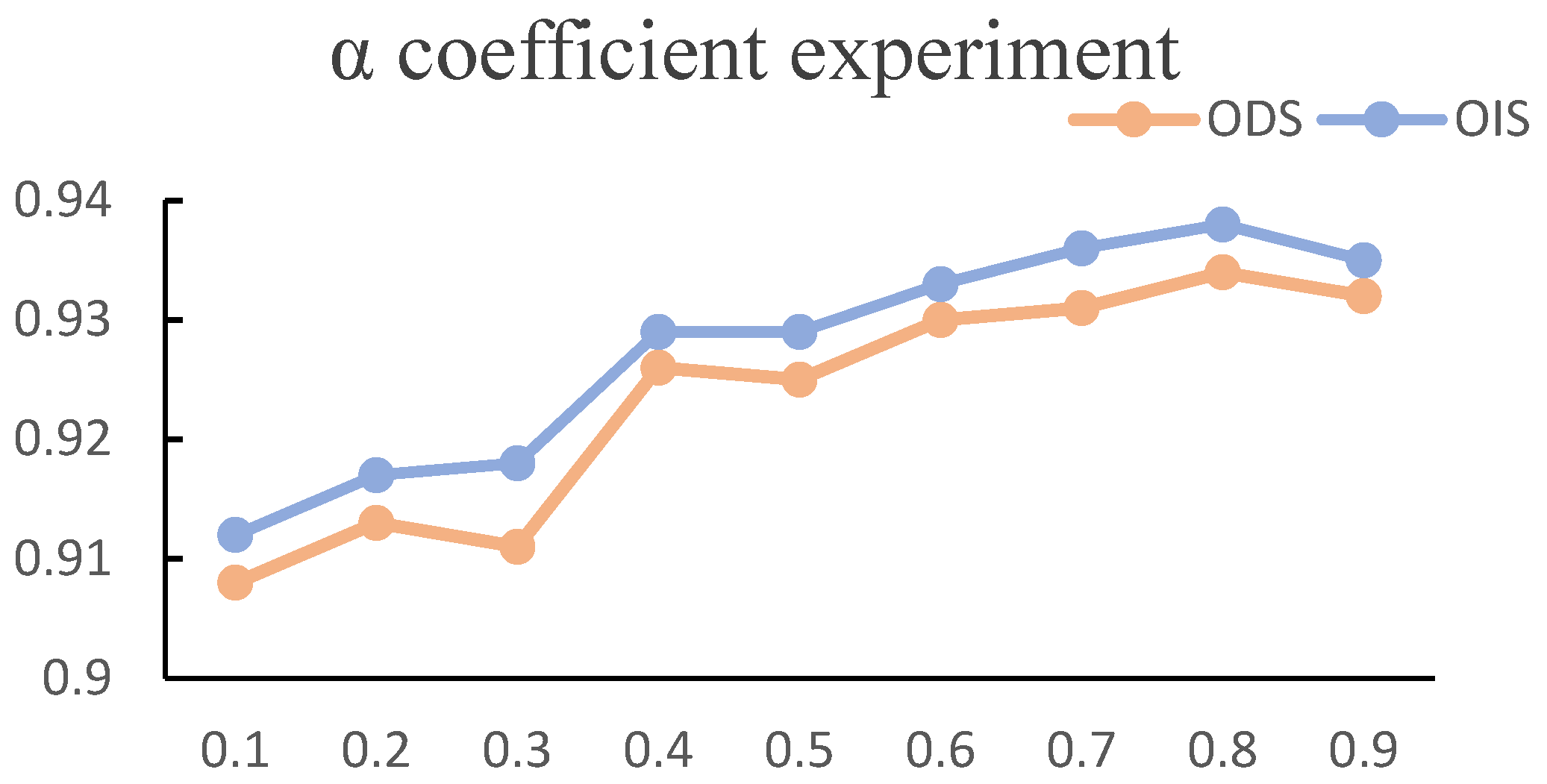
3.2. Joint Loss Function
4. Experimental Results and Analysis
4.1. Image Dataset
4.2. Ablation Experiment
4.3. DoU Loss Function Parameter Experiment
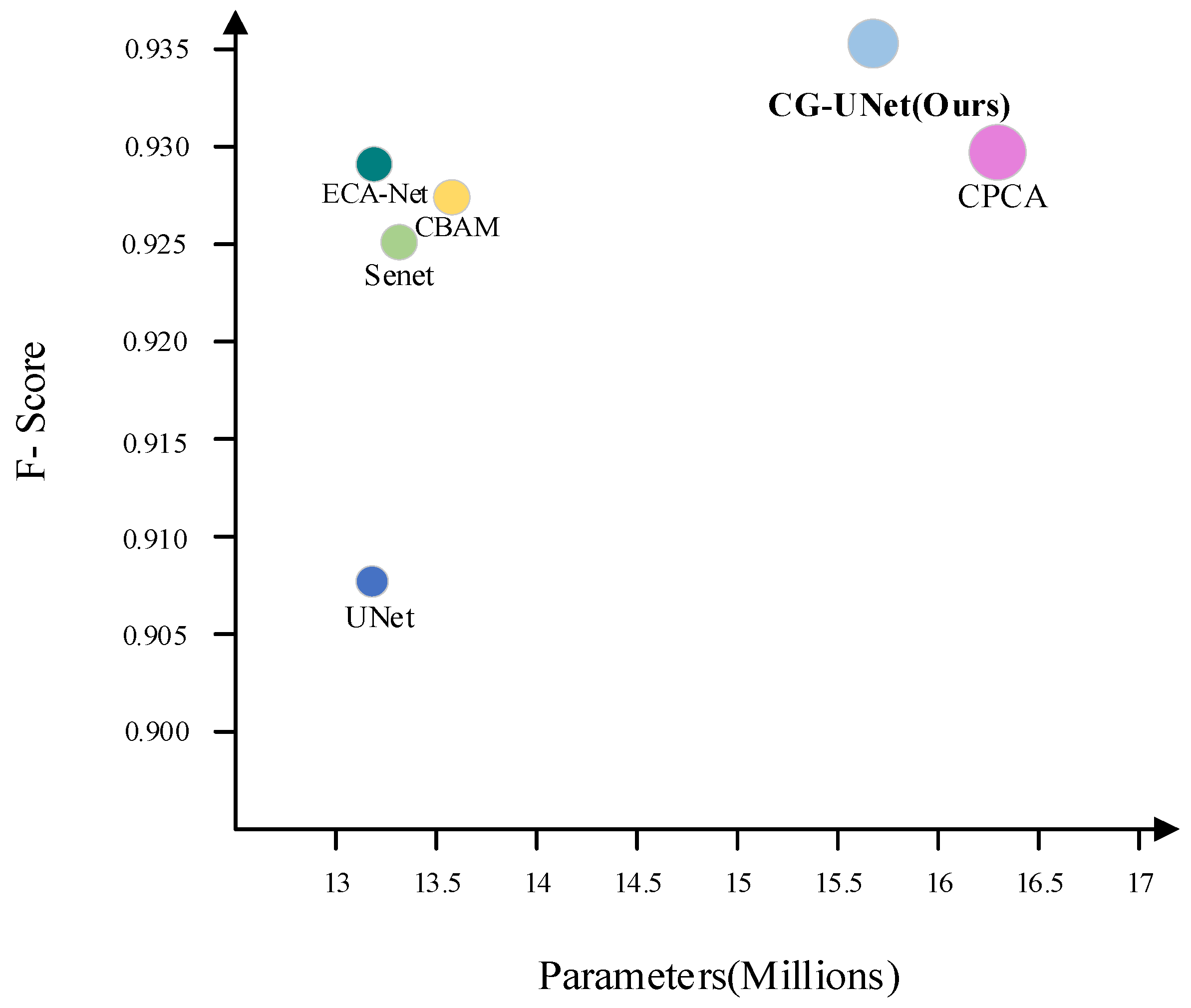
4.4. Attention Comparison Experiment
4.5. Comparison with Other Algorithms
4.6. Calculation of Ice Thickness
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, L.; Chen, J.; Hao, Y.; Li, L.; Lin, X.; Yu, L.; Li, Y.; Yuan, Z. Experimental study on ultrasonic detection method of ice thickness for 10 kV overhead transmission lines. IEEE Trans. Instrum. Meas. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Zhang, C.; Gong, Q.; Koyamada, K. Visual analytics and prediction system based on deep belief networks for icing monitoring data of overhead power transmission lines. J. Vis. 2020, 23, 1087–1100. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, X. Study on transmission line icing prediction based on micro-topographic correction. AIP Adv. 2022, 12, 085103. [Google Scholar] [CrossRef]
- Yang, G.; Jiang, X.; Liao, Y.; Li, T.; Deng, Y.; Wang, M.; Hu, J.; Ren, X.; Zhang, Z. Research on load transfer melt-icing technology of transmission lines: Its critical melt-icing thickness and experimental validation. Electr. Power Syst. Res. 2023, 221, 109409. [Google Scholar] [CrossRef]
- Zhu, Y.; Tan, Y.; Huang, Q.; Huang, F.; Zhu, S.; Mao, X. Research on melting and de-icing methods of lines in distribution network 3rd Conference on Energy Internet and Energy System Integration. In Proceedings of the 2019 IEEE 3rd Conference on Energy Internet and Energy System Integration (EI2), Changsha, China, 8–10 November 2019; IEEE: Piscataway, NJ, USA, 2020; pp. 2370–2373. [Google Scholar] [CrossRef]
- Ma, T.; Fu, W.G.; Ma, J. Popliteal vein external banding at the valve-free segment to treat severe chronic venous insufficiency. J. Vasc. Surg. 2016, 64, 438–445.e1. [Google Scholar] [CrossRef]
- Fikke, S.M.; Kristjánsson, J.E.; Kringlebotn Nygaard, B.E. Modern Meteorology and Atmospheric Icing Atmospheric Icing of Power Networks; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–29. [Google Scholar] [CrossRef]
- Zhong, J.; Jiang, X.; Zhang, Z.; Zhu, Z.; Wu, Z.; Liu, X. Equivalent measurement method for ice thickness of transmission lines. J. Phys. Conf. Ser. 2024, 2896, 012033. [Google Scholar] [CrossRef]
- Yang, L.; Chen, Y.; Hao, Y.; Li, L.; Li, H.; Huang, Z. Detection method for equivalent ice thickness of 500-kV overhead lines based on axial tension measurement and its application. IEEE Trans. Instrum. Meas. 2023, 72, 1–11. [Google Scholar] [CrossRef]
- Yao, C.G.; Zhang, L.; Li, C.X. Measurement method of conductor ice covered thickness based on analysis of mechanical and sag measurement. High Volt. Eng. 2013, 39, 1204–1209. [Google Scholar] [CrossRef]
- Berlijn, S.M.; Gutman, I. Laboratory tests and web based surveillance to determine the ice-and snow performance of insulators. IEEE Trans. Dielectr. Electr. Insul. 2007, 14, 1373–1380. [Google Scholar] [CrossRef]
- Wang, J.; Wang, J.; Shao, J.; Li, J. Image recognition of icing thickness on power transmission lines based on a least squares Hough transform. Energies 2017, 10, 415. [Google Scholar] [CrossRef]
- Verma, R.; Kumar, N.; Patil, A. MoNuSAC2020: A multi-organ nuclei segmentation and classification challenge. IEEE Trans. Med. Imaging 2021, 40, 3413–3423. [Google Scholar] [CrossRef] [PubMed]
- Zunair, H.; Hamza, A.B. Sharp U-Net: Depthwise convolutional network for biomedical image segmentation. Comput. Biol. Med. 2021, 136, 104699. [Google Scholar] [CrossRef] [PubMed]
- Zunair, H.; Hamza, A.B. Masked supervised learning for semantic segmentation. arXiv 2022, arXiv:2210.00923. [Google Scholar] [CrossRef]
- Varshney, D.; Rahnemoonfar, M.; Yari, M.; Paden, J. Deep ice layer tracking and thickness estimation using fully convolutional networks. In Proceedings of the 2020 IEEE International Conference on Big Data (Big Data), Atlanta, GA, USA, 10–13 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 3943–3952. [Google Scholar] [CrossRef]
- Wang, B.; Ma, F.; Ge, L.; Ma, H.; Wang, H.; Mohamed, M.A. Icing-EdgeNet: A pruning lightweight edge intelligent method of discriminative driving channel for ice thickness of transmission lines. IEEE Trans. Instrum. Meas. 2020, 70, 1–12. [Google Scholar] [CrossRef]
- Nusantika, N.R.; Hu, X.; Xiao, J. Newly designed identification scheme for monitoring ice thickness on power transmission lines. Appl. Sci. 2023, 13, 9862. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhou, J. Overview of image edge detection. Comput. Eng. Appl. 2023, 59, 40–54. [Google Scholar] [CrossRef]
- Kittler, J. On the accuracy of the Sobel edge detector. Image Vis. Comput. 1983, 1, 37–42. [Google Scholar] [CrossRef]
- Roberts, L.G. Machine Perception of Three-Dimensional Solids. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1963. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef]
- Xie, S.; Tu, Z. Holistically-nested edge detection. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1395–1403. [Google Scholar] [CrossRef]
- Liu, Y.; Cheng, M.M.; Hu, X.; Wang, K.; Bai, X. Richer convolutional features for edge detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3000–3009. [Google Scholar] [CrossRef]
- Deng, R.; Shen, C.; Liu, S. Learning to predict crisp boundaries. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 562–578. [Google Scholar] [CrossRef]
- Milletari, F.; Navab, N.; Ahmadi, S.A. V-net: Fully convolutional neural networks for volumetric medical image segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 565–571. [Google Scholar] [CrossRef]
- He, J.; Zhang, S.; Yang, M.; Shan, Y.; Huang, T. Bi-directional cascade network for perceptual edge detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3823–3832. [Google Scholar] [CrossRef]
- Poma, X.S.; Riba, E.; Sappa, A. Dense extreme inception network: Towards a robust cnn model for edge detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Village, CO, USA, 1–5 March 2020; pp. 1923–1932. [Google Scholar] [CrossRef]
- Chollet, F.; Xception, C.F. Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar] [CrossRef]
- Su, Z.; Liu, W.; Yu, Z.; Hu, D.; Liao, Q.; Tian, Q.; Pietikainen, M.; Liu, L. Pixel difference networks for efficient edge detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5097–5107. [Google Scholar] [CrossRef]
- Zhou, C.; Huang, Y.; Pu, M. The treasure beneath multiple annotations: An uncertainty-aware edge detector. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 15507–15517. [Google Scholar] [CrossRef]
- Liu, Y.; Tang, Z.; Xu, Y. Detection of ice thickness of high voltage transmission line by image processing. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 2191–2194. [Google Scholar] [CrossRef]
- Chang, Y.; Yu, H.; Kong, L. Study on the calculation method of ice thickness calculation and wire extraction based on infrared image. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 381–386. [Google Scholar] [CrossRef]
- Nusantika, N.R.; Hu, X.; Xiao, J. Improvement canny edge detection for the UAV icing monitoring of transmission line icing. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Liang, S.; Wang, J.; Chen, P.; Yan, S.; Huang, J. Research on image recognition technology of transmission line icing thickness based on LSD Algorithm. In International Conference in Communications, Signal Processing, and Systems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 100–110. [Google Scholar] [CrossRef]
- Lin, G.; Wang, B.; Yang, Z. Identification of icing thickness of transmission line based on strongly generalized convolutional neural network. In Proceedings of the 2018 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Singapore, 22–25 May 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Hu, T.; Shen, L.; Wu, D.; Duan, Y.; Song, Y. Research on transmission line ice-cover segmentation based on improved U-Net and GAN. Electr. Power Syst. Res. 2023, 221, 109405. [Google Scholar] [CrossRef]
- Ma, F.; Wang, B.; Li, M.; Dong, X.; Mao, Y.; Zhou, Y.; Ma, H. An Edge Intelligence Approach for Power Grid Icing Condition Detection through Multi-Scale Feature Fusion and Model Quantization. Front. Energy Res. 2021, 9, 754335. [Google Scholar] [CrossRef]
- Ma, T.; Yuan, X.; Liu, R.; Wang, Z.; Liu, X. A deep learning-based method for extracting ice cover on power transmission lines. In Proceedings of the Fifth International Conference on Computer Vision and Data Mining (ICCVDM 2024), Changchun, China, 19–21 July 2024; SPIE: Bellingham, WA, USA, 2024; Volume 13272, pp. 707–713. [Google Scholar]
- Nusantika, N.R.; Xiao, J.; Hu, X. Precision Ice Detection on Power Transmission Lines: A Novel Approach with Multi-Scale Retinex and Advanced Morphological Edge Detection Monitoring. J. Imaging 2024, 10, 287. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; IEEE Press: Piscataway, NJ, USA, 2020; pp. 11531–11539. [Google Scholar] [CrossRef]
- Huang, H.; Chen, Z.; Zou, Y. Channel prior convolutional attention for medical image segmentation. arXiv 2023, arXiv:2306.05196. [Google Scholar] [CrossRef]
- Sun, F.; Luo, Z.; Li, S. Boundary difference over union loss for medical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer Nature: Cham, Switzerland, 2023; pp. 292–301. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.Y. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Algorithm | Advantages and Disadvantages |
|---|---|---|
| Traditional edge detection algorithms | Canny | It can recognize simple edge information, but the overall detection accuracy is not high. |
| Ratio | Capable of detecting multi-scale and multi-directional edge information, sensitive to noise. | |
| Improvement Canny | Improved the detection accuracy of the Canny operator, but the calculation process is more complex. | |
| LSD | The LSD algorithm is used for linear detection, but it performs poorly in complex backgrounds. | |
| Deep learning detection algorithms | IBP | The use of IBP algorithm to determine the parameters of convolutional layers is a complex training process and difficult to optimize parameters. |
| S_UNet | The use of transfer learning and attention mechanisms for ice-covered area segmentation is not precise enough for edge detail processing. | |
| Mask RCNN | The use of object detection technology for ice thickness recognition can only determine whether the ice thickness is within a certain range. |
| DoU Loss | Attention | CGM | ODS | OIS | |
|---|---|---|---|---|---|
| Baseline | 0.907 | 0.917 | |||
| CG-UNet | ✓ | 0.924 | 0.929 | ||
| ✓ | 0.922 | 0.928 | |||
| ✓ | ✓ | 0.926 | 0.930 | ||
| ✓ | ✓ | ✓ | 0.934 | 0.938 |
| Method | ODS | OIS | Parameter/M | GFLOPS | FPS |
|---|---|---|---|---|---|
| Canny | 0.323 | 0.323 | - | - | - |
| HED | 0.858 | 0.867 | 14.7 | 93.5 | 34.8 |
| RCF | 0.873 | 0.883 | 14.8 | 102.6 | 33.4 |
| BDCN | 0.900 | 0.905 | 16.3 | 143.6 | 25.6 |
| DexiNed | 0.901 | 0.912 | 35.1 | 140.4 | 21.2 |
| PidiNet | 0.912 | 0.920 | 11.4 | 78.2 | 38 |
| UAED | 0.924 | 0.927 | 9.1 | 97.3 | 26.3 |
| CG-UNet | 0.934 | 0.938 | 15.8 | 156.7 | 24.5 |
| Actual Thickness/mm | Test Method | Predicted Thickness/mm | Error |
|---|---|---|---|
| 5.0 | CG-UNet | 4.64 | 0.072 |
| UAED | 4.53 | 0.094 | |
| S-UNet | 5.76 | 0.152 | |
| 11.0 | CG-UNet | 11.52 | 0.047 |
| UAED | 10.33 | 0.061 | |
| S-UNet | 11.86 | 0.078 | |
| 17.5 | CG-UNet | 16.90 | 0.034 |
| UAED | 18.34 | 0.048 | |
| S-UNet | 16.62 | 0.050 | |
| 20.5 | CG-UNet | 21.96 | 0.071 |
| UAED | 22.34 | 0.089 | |
| S-UNet | 18.73 | 0.086 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Jiao, Y.; Dou, Y.; Zhao, L.; Liu, Q.; Liu, Y. Ice Thickness Detection of Transmission Lines Based on Cross-Guide-UNet. Appl. Sci. 2025, 15, 4264. https://doi.org/10.3390/app15084264
Zhang Y, Jiao Y, Dou Y, Zhao L, Liu Q, Liu Y. Ice Thickness Detection of Transmission Lines Based on Cross-Guide-UNet. Applied Sciences. 2025; 15(8):4264. https://doi.org/10.3390/app15084264
Chicago/Turabian StyleZhang, Yu, Yangyang Jiao, Yinke Dou, Liangliang Zhao, Qiang Liu, and Yang Liu. 2025. "Ice Thickness Detection of Transmission Lines Based on Cross-Guide-UNet" Applied Sciences 15, no. 8: 4264. https://doi.org/10.3390/app15084264
APA StyleZhang, Y., Jiao, Y., Dou, Y., Zhao, L., Liu, Q., & Liu, Y. (2025). Ice Thickness Detection of Transmission Lines Based on Cross-Guide-UNet. Applied Sciences, 15(8), 4264. https://doi.org/10.3390/app15084264