1. Introduction
Interior permanent magnet synchronous motors (IPMSMs) are widely used in electric vehicle (EV) traction and industrial servo systems due to their high power density, high speed range and high efficiency [
1]. It is still significant to optimize motor average output torque, efficiency while reducing torque fluctuations in order to enhance motor performance, improve motor energy consumption, suppress motor noise and stabilize output power [
2].
Traditional multi-objective optimization of IPMSMs relies on large scale finite elements simulations, but the cost of computation increases significantly for a contradiction between high-dimensional design parameters and limited sample capacity [
3]. To reduce computational consumption, the surrogate-assisted multi-objective optimization method has wide applications in the field of multi-objective optimization of motors. Ref. [
4] proposed a surrogate-based model optimization process for permanent magnet synchronous motors (PMSMs), which uses a comprehensive criterion for model evaluation and selection that takes into account both prediction accuracy and time consumption, and compares the prediction performance of four algorithms, namely Multi-Layer Perceptron (MLP), Generalized Regression Neural Network (GRNN), Support Vector Regression (SVR) and Kriging. In the arithmetic example, the MLP had a better prediction performance for all optimization objectives. Ref. [
5] proposed a data-driven-based multi-objective optimization framework of a PMSM with a limited sample size that uses 200 sample points to train an SVR model. Both root mean square error (RMSE) and
score achieved the demand of prediction precision. Ref. [
6] proposed a fast multi-objective optimization algorithm for electromagnetic components based on an Adaptive Neural Network (Adaptive NN) that updates the weights during the optimization process, which effectively accelerates the optimization computation time without losing the optimization quality. Ref. [
7] compared 11 surrogate models based on RMSE during the process of multi-objective optimization of an EV’s traction motor. Kriging, Gradient Boosting Decision Tree (GBDT), MLP and Radial Basis Function (RBF) methods were chosen for different optimization objectives to build the surrogate model to minimize the RMSE for each objective, and the optimization results predicted by the surrogate model were very close to the validation results of finite elements.
In the process of building surrogate models, a series of experimental design methods are introduced to achieve modeling under finite samples of motors. Under high-dimensional limited samples, the parameters of the model may be biased, thus leading to a decrease in prediction accuracy [
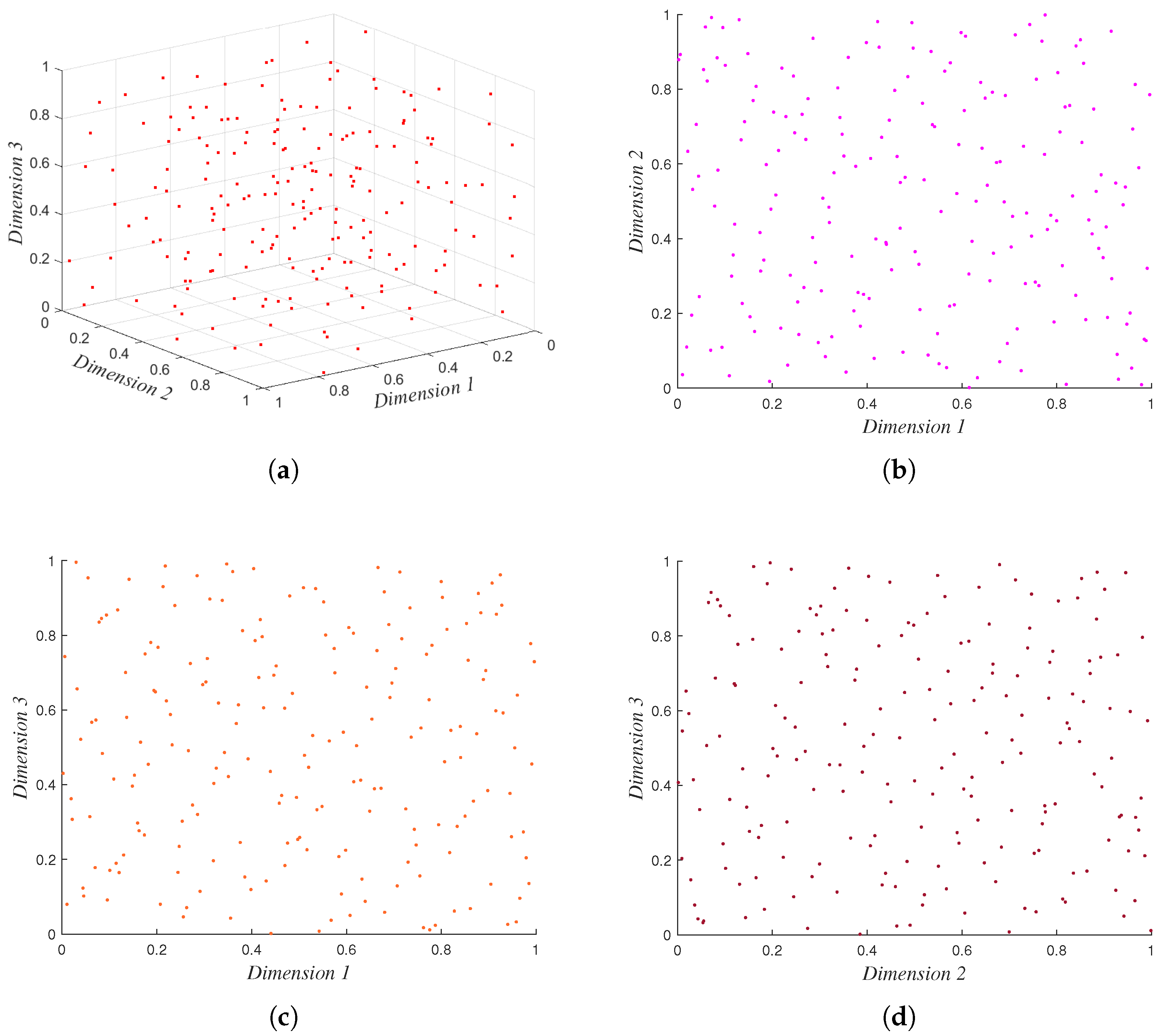
8], so it is important to choose a suitable way to fill the experimental space. Among the experimental space-filling designs, Latin hypercube sampling (LHS) is widely used in motor optimization, which seeks to maximize the acquisition of information about the unknown design space while minimizing the number of samples by optimizing the sample point selection strategy [
9,
10,
11,
12].
It is obvious that selecting key design parameters that have significant impacts while eliminating unnecessary or redundant parameters could lead to a lower model complexity. There are various approaches to selecting key variables. Here, they are simply grouped into two categories: statistically based analysis methods, which are often described as sensitivity or correlation analysis, and machine learning-based analysis methods, which are usually described as feature selection. Commonly used statistically based analysis methods are Pearson correlation analysis [
13,
14], Spearman correlation analysis [
15], analysis of variance (ANOVA) [
5], signal-to-noise ratio analysis [
5,
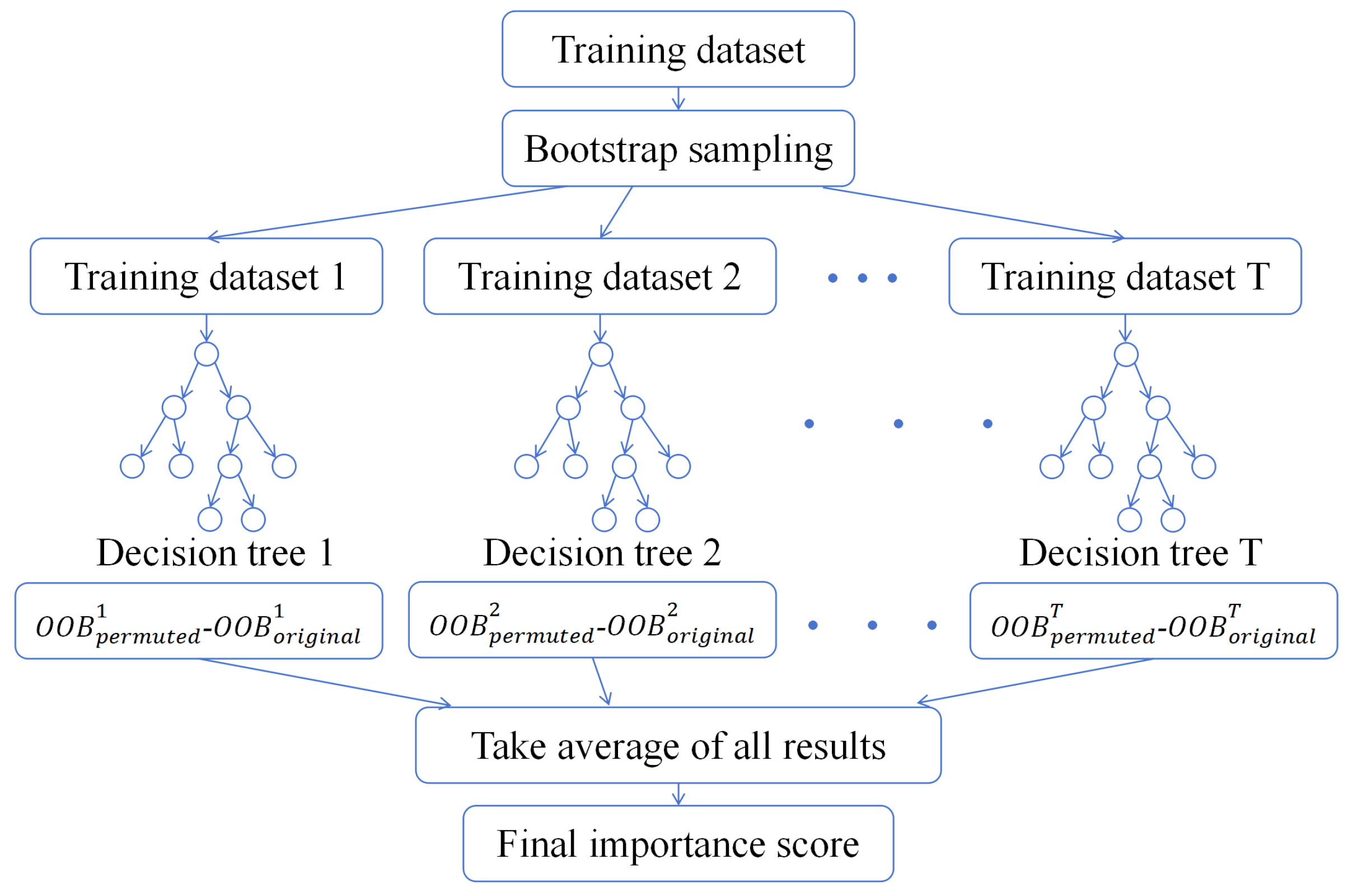
16], etc. Among the commonly used machine learning-based analysis methods, random forest (RF)-based feature selection methods stand out in motor optimization. Ref. [
17] obtained VI values to represent the relative importance of the design variables based on the errors before and after performing variable substitution during random forest training. Ref. [
18] considered the relative importance of the input variables as the default output when calling the random forest algorithm in the Python sklearn package, so it was directly adopted as the basis for selecting the key design variables. The main difference between the two approaches is that the statistically based analysis methods focused only on the significance of the effect of the design variables on the objective variables under statistical significance, while the machine learning-based analysis methods are more inclined to focus on the effect of the design variables on the predictive performance of the model. However, we note that few studies combining the two have been reported.
Factors such as strong coupling between motor parameters and nonlinearity of the objective function cause multi-objective optimization to fall into local optimums and the optimization objectives are difficult to be weighed, so a variety of intelligent optimization algorithms have been introduced to solve the problem [
19]. Ref. [
20] built a surrogate model with a pyramidal neural network (PNN) and used the Quantum Bat Algorithm (QBA) to optimize IPMSMs, which obtained higher output power and lower loss. Ref. [
7] built a surrogate model with the Kringing method and used the Non-dominated Sorting Genetic Algorithm II (NSGA-II) multi-objective optimization algorithm to optimize the efficiency and torque fluctuation of a permanent magnet-assisted synchronous reluctance motor (PMASRM). After optimization, the PMASRM gained higher efficiency and less torque fluctuation. The results were well verified. Swarm intelligent optimization algorithm has stronger robustness, simple structure, less overhead, and self-organization; thus, the multi-objective particle swarm optimization (MOPSO) algorithm is widely used. Based on PSO for the PMSM’s electromagnetic performance of multi-objective optimization, the results of [
21] show that the cogging torque has been effectively reduced, the magnitude of the reverse electromotive force has been reduced, the flux density is in a reasonable range, and the electromagnetic performance of the motor has been improved. Ref. [
22] used the Taguchi method and PSO to optimize an 8-pole, 48-slot IPMSM’s average output torque, torque fluctuation, and iron loss. The results show that the average output torque is improved, the torque fluctuation and iron loss are suppressed, and the effectiveness of the Taguchi method-PSO hybrid algorithm is verified. Ref. [
23] improved the weight coefficients of the PSO algorithm and used it to carry out multi-objective optimization of the Yokeless And Segmented Armature (YASA) motor in order to optimize the average output torque, the torque fluctuation, and the motor output power. The results showed that the motor output power and average output torque are improved, while torque fluctuation is effectively suppressed, and the effectiveness of the optimization was proven through experiments. Ref. [
24] used the PSO based on adaptive inertia weights to carry out multi-objective optimization of the rotor pole–parallel hybrid excitation synchronous marine motors, which results in the improvement of the motor’s torque, suppression of torque fluctuation and optimization of the no-load electromotive force.
The multi-objective optimization algorithm gives a series of Pareto non-dominant solutions in which the final optimization result will be selected. For the selection of the Pareto optimal solution, practical feasibility and cost-effectiveness need to be considered, and the selection in engineering often relies on practical experience and skills [
25], which is somewhat subjective. However, the objective selection method of Pareto’s optimal solution has also gained attention. In ref. [
26], a Pareto optimal solution ranking approach based on the R-method is proposed. The Technique for Order Preference by Similarity to Ideal Solution (TOPSIS) method was used in the study [
27] to select the Pareto optimal solution by measuring the distance between the solution and the optimal worst-case point. The gray relation analysis (GRA) was used as a basis for ranking the Pareto solution set in ref. [
28]. Selection methods based on information entropy have received much attention. The information entropy (Shannon entropy) was firstly proposed by C.E. Shannon in [
29]. On this basis, various types of algorithms based on Shannon entropy have gained wide extension and application. Ref. [
30] proposed a differential entropy-based compactness index to measure compactness in scenarios such as transportation systems. Based on a large amount of data and theoretical analysis, ref. [
31] analyzes the effect of entropy weight on TOPSIS and proposes an entropy-based TOPSIS with adjustable weight coefficients.
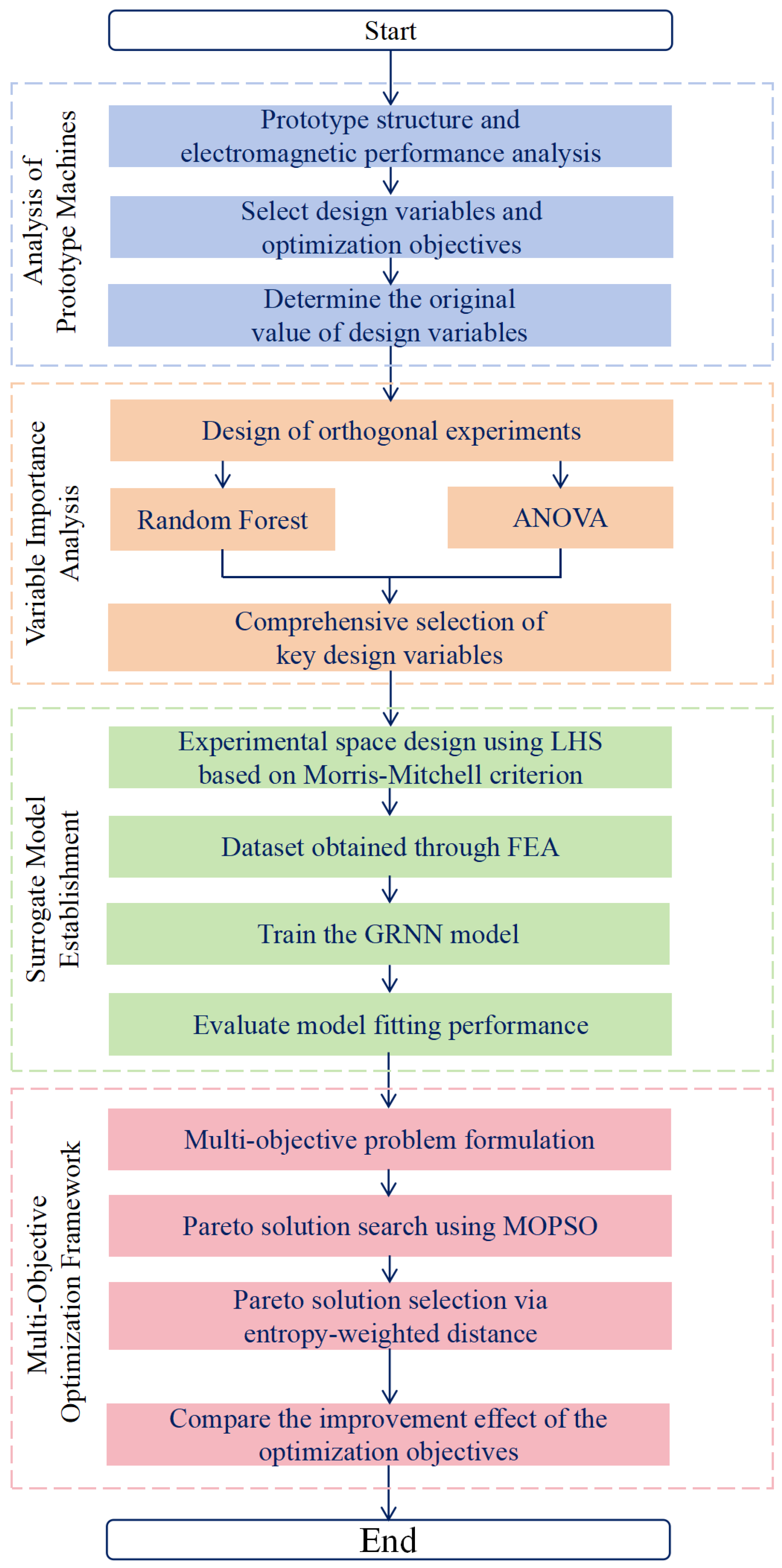
This article proposes a surrogate assisted multi-objective optimization framework with limited sample size, and the core work includes the following:
Variable importance analysis using RF + ANOVA, which focuses on both the contribution of design variables on model prediction and the sensitivity of each design variable on optimization objectives, has combined machine learning and statistical methods. Variables selected in this way possess both model predictive utility and high sensitivity.
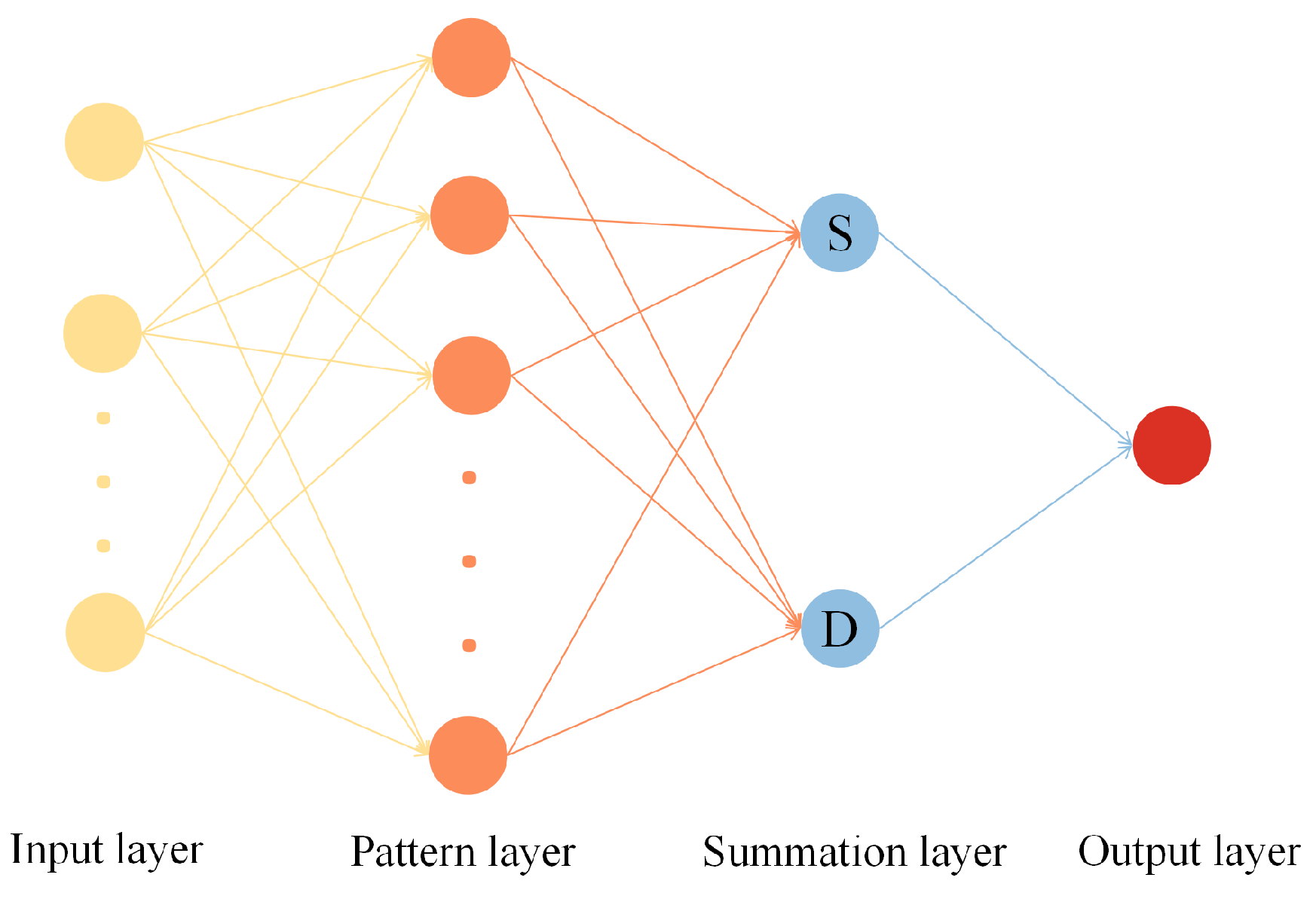
A surrogate model is established using a GRNN with excellent results under limited samples, whose mathematical foundation has a fixed architecture and is controlled by a single hyperparameter, simplifying parameter adjustment.
An objective selection method of Pareto’s optimal solution based on “entropy weight distance” is proposed, which distinguishes the weights of different performance indexes and avoids the dependence on experts’ experience in the selection.
In this paper,
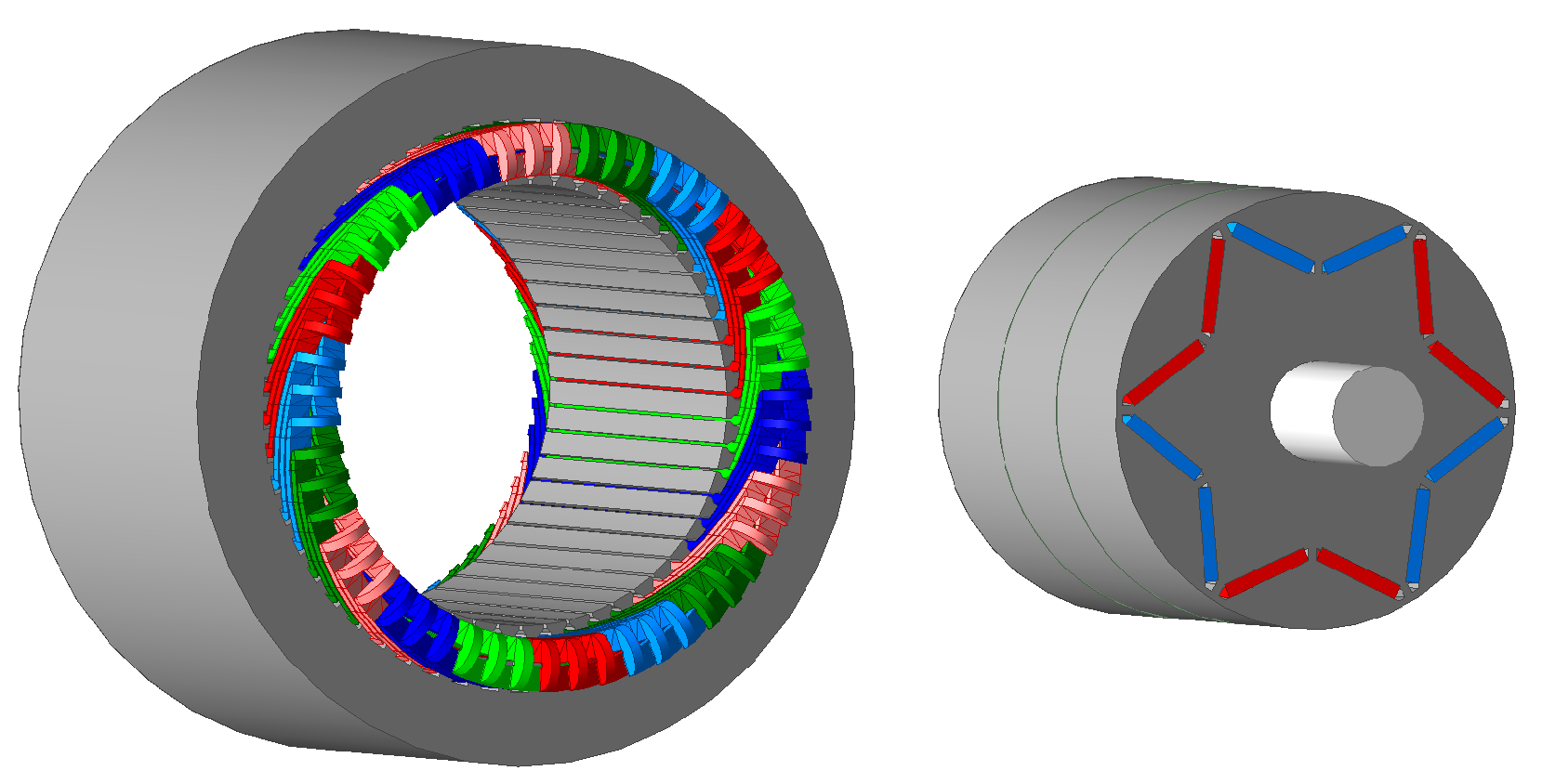
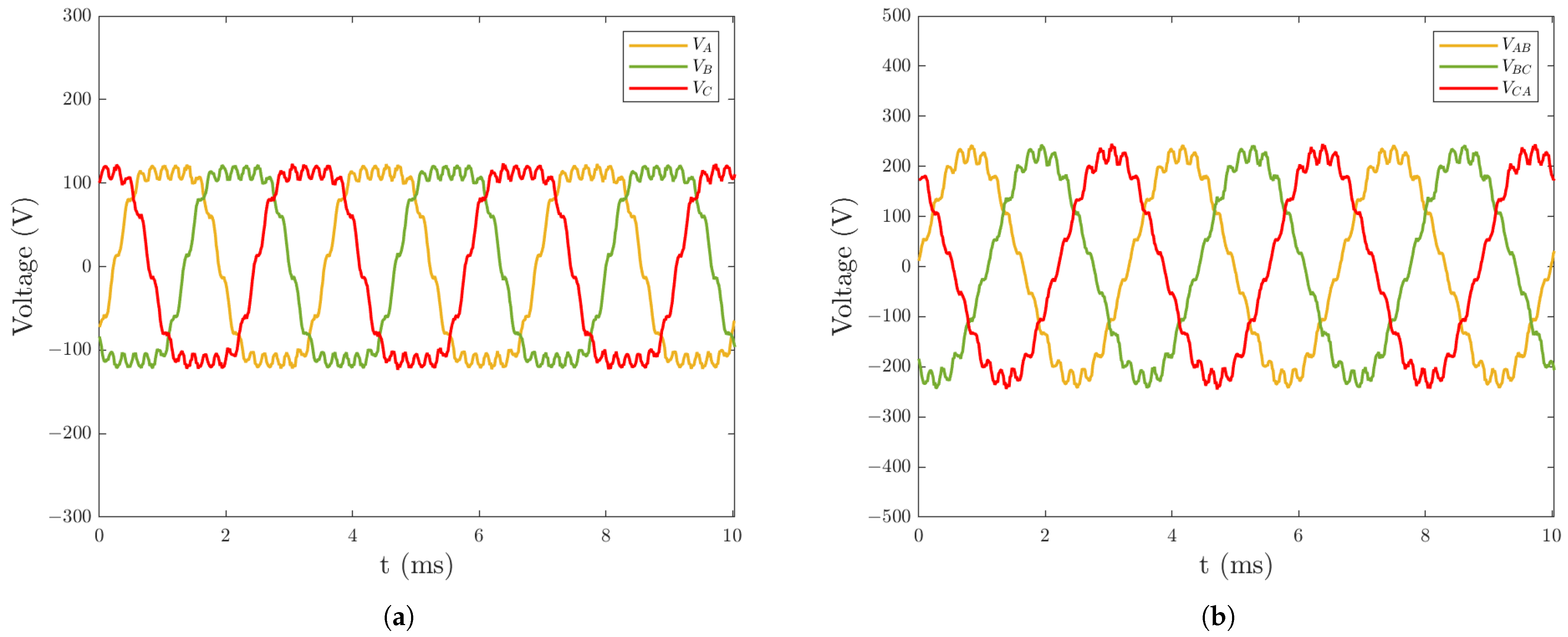
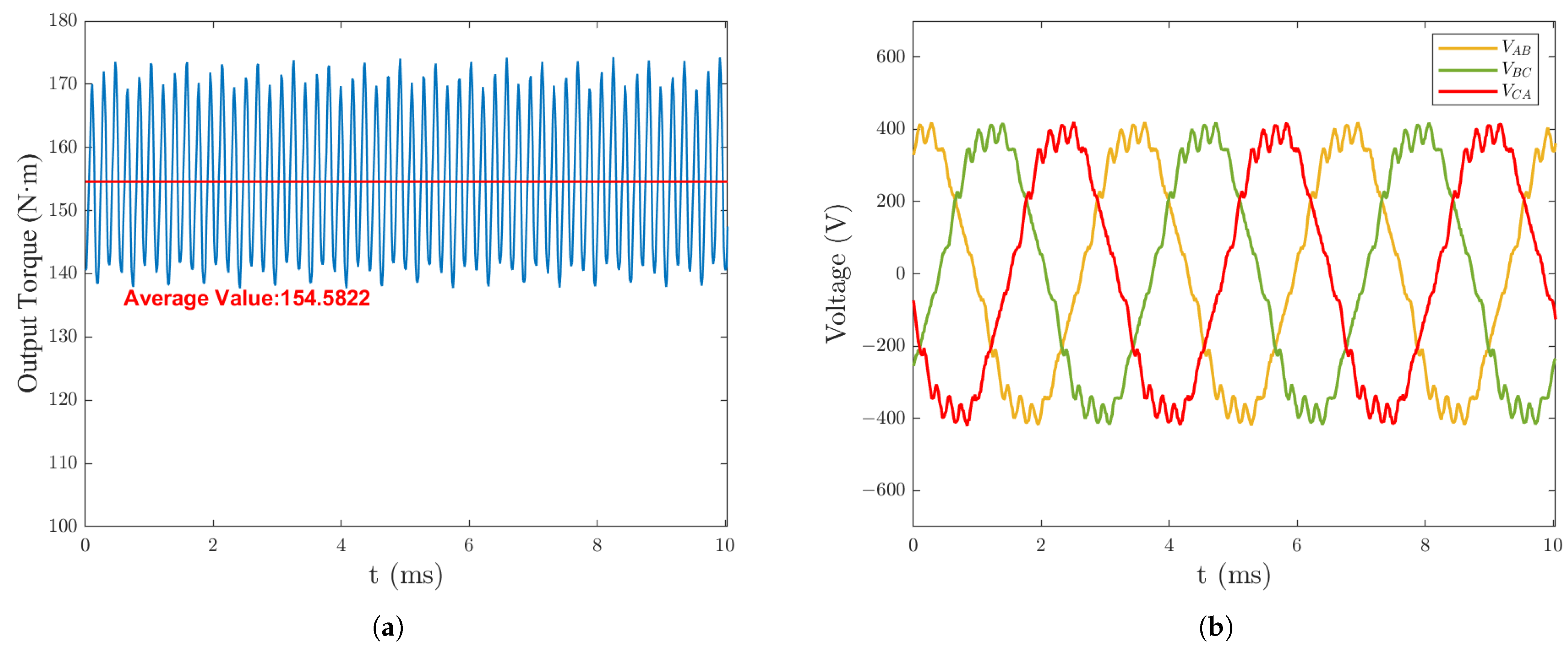
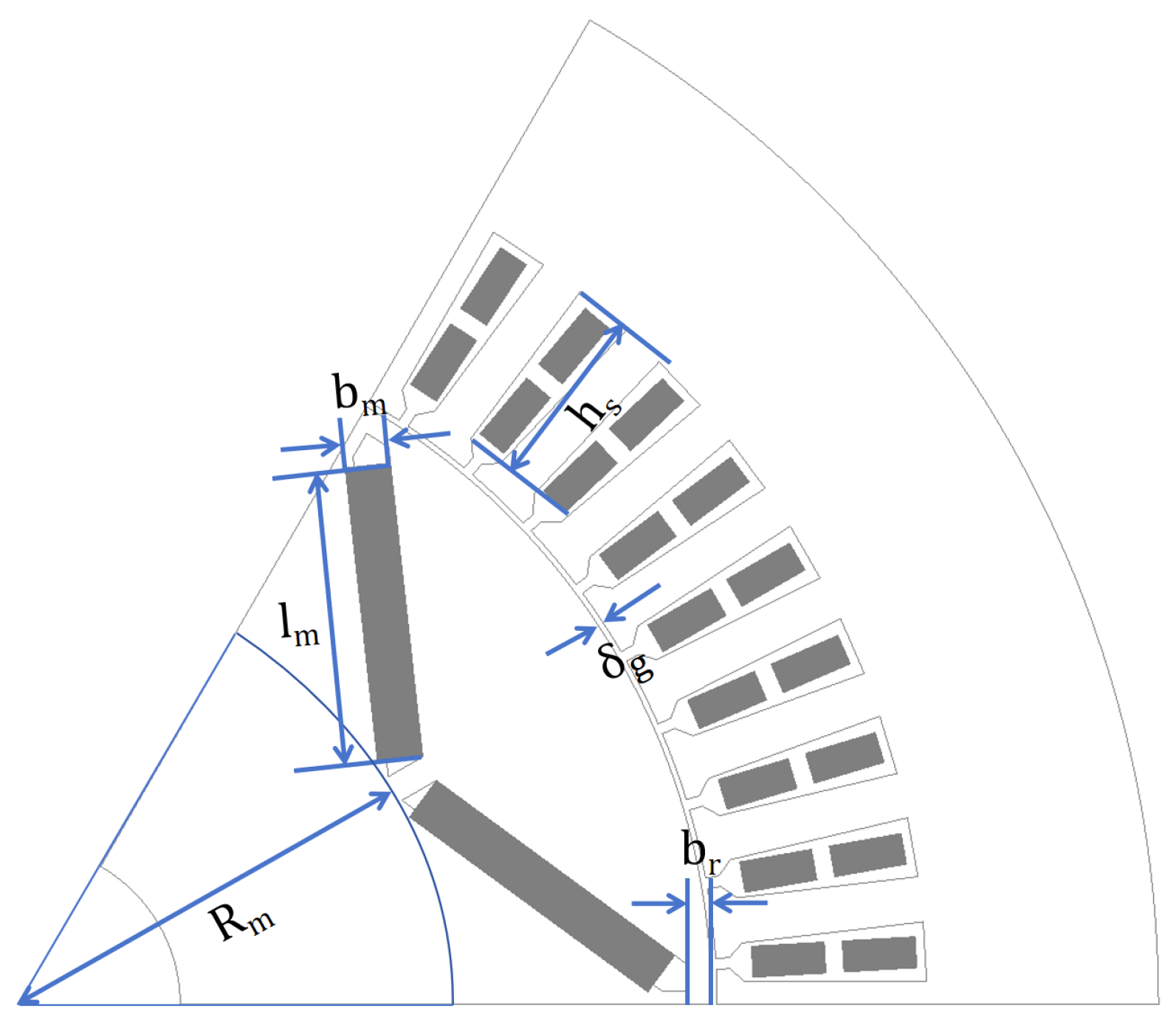
Section 2 describes the structure, electromagnetic performance, design variables and optimization variables of the IPMSM prototype;
Section 3 carries out the importance analysis of each design variable;
Section 4 describes the multi-objective optimization problem and constructs the surrogate model by a GRNN;
Section 5 obtains the Pareto frontier through the MOPSO algorithm, and selects the Pareto optimal solution by the “entropy weight distance” method to select the Pareto optimal solution; and
Section 6 concludes this article. The flowchart of this study is delineated in
Figure 1.
6. Conclusions
This study presents a surrogate-assisted multi-objective optimization framework for IPMSMs under limited sample constraints, addressing critical challenges in computational efficiency, variable selection, and Pareto solution prioritization.
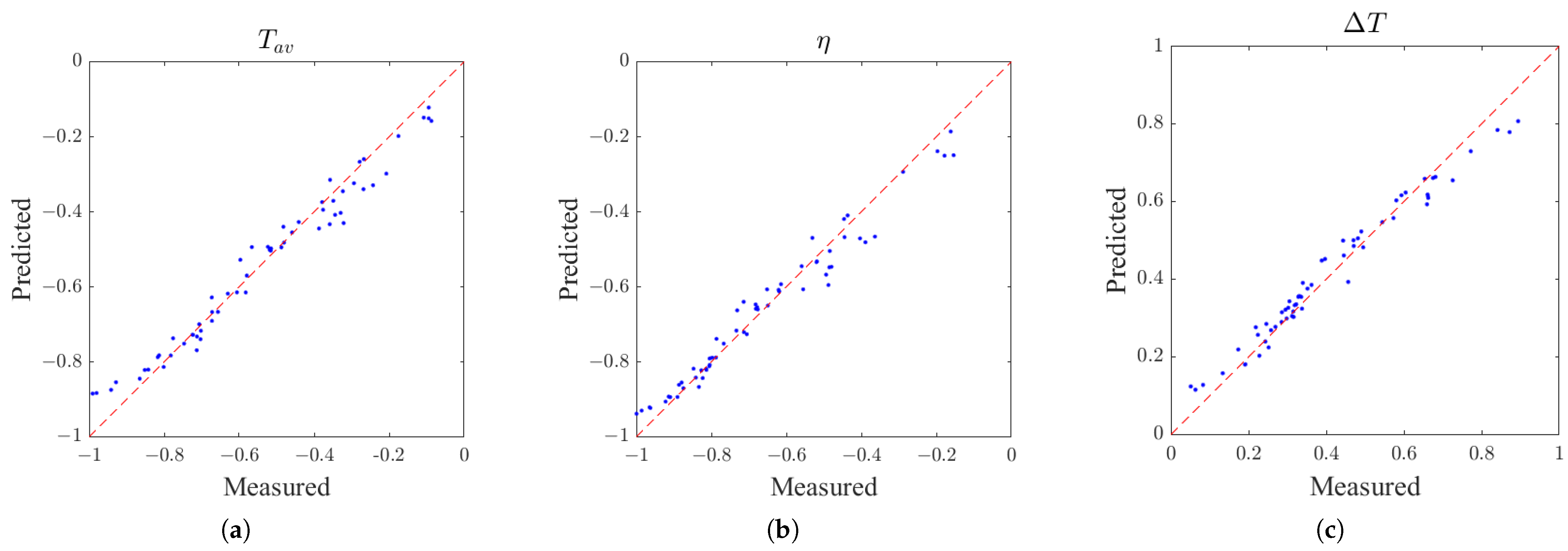
The proposed framework integrates three core components to systematically optimize IPMSM performance. First, a dual-strategy variable importance analysis combining RF and ANOVA is employed to identify key design parameters. RF focuses on the contribution of design variables to the model’s predictions, while ANOVA examines the sensitivity of design variables to optimization objectives, ensuring that the selected variables (flux barrier thickness , PM thickness , and PM width ) possess both predictive utility and high sensitivity. Next, a GRNN surrogate model is constructed using LHS optimized by the Morris–Mitchell criterion. GRNN’s single hyperparameter architecture simplifies training and enhances efficiency under limited samples, achieving high prediction accuracy ( > 0.96). Finally, an MOPSO algorithm generates Pareto-optimal solutions, and an entropy-weighted distance metric objectively selects the final design by quantifying trade-offs between normalized objectives, eliminating reliance on subjective expert judgment.
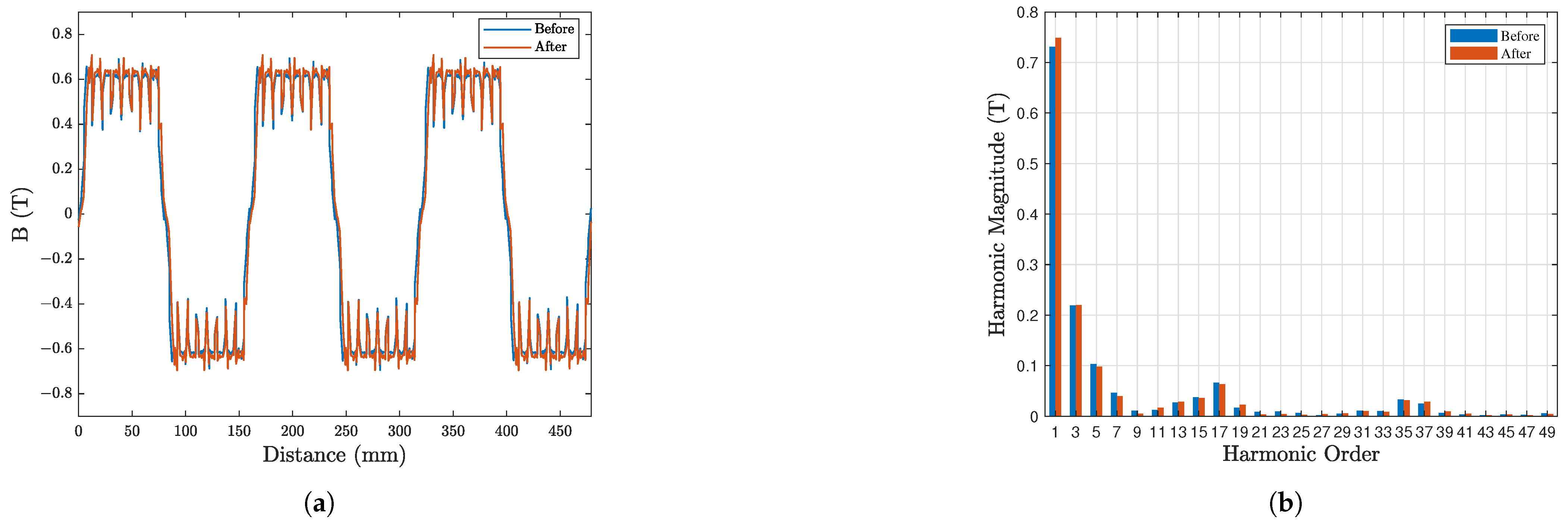
The optimized IPMSM demonstrates significant performance improvements over the prototype. Finite element analysis validates a 4.62% increase in average output torque (from 154.96 N·m to 162.12 N·m), a 0.15% enhancement in efficiency (from 98.05% to 98.20%), and a 10.48% reduction in torque ripple (from 36.13 N·m to 32.35 N·m). The surrogate model predictions align closely with simulation results, exhibiting relative errors below 2.92%, confirming the framework’s robustness. These enhancements are attributed to optimized magnetic flux concentration and reduced leakage through strategic adjustments to , and , validated by increased air gap flux density and improved pole-arc characteristics.
In conclusion, this study advances surrogate-assisted optimization for IPMSMs, providing a systematic, data-driven framework that balances computational efficiency, predictive accuracy and engineering practicality.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}