1. Introduction
In the total area of the Earth, the ocean area accounts for about 71%, which is rich in oil and natural gas and other resources, with a vast mining space and great mining value. Offshore oil platforms, submarine oil and gas pipelines, and other facilities have become indispensable engineering facilities for offshore oil and gas exploitation. However, due to the harsh working environment over time, after being eroded by seawater, the sea breeze, and marine organisms, the engineering facilities will have risks, such as structural strength reduction and material performance degradation. If not handled in time, this will have serious irreparable consequences. Therefore, it is necessary to carry out regular inspection and maintenance of such engineering facilities. In the past, most of these jobs were done manually, but the labor cost was high, and the risk coefficient was large. Therefore, ROVs have begun to be used for the detection and maintenance of engineering facilities, and it has achieved great development [
1,
2].
According to their operation mode, underwater vehicles are mainly divided into human occupied vehicles (HOVs), remotely operated vehicles (ROVs), and autonomous underwater vehicles (AUVs). Among them, HOVs can carry operators into the deep sea for scientific exploration and other work, but they have disadvantages of high risk and high cost. At present, many countries have the ability to independently develop HOVs and have achieved many results. For example, these include “Jiaolong” in China, “Alvin” in the United States, “Deep Sea 6500” in Japan, Russia’s “Warrior D”, and France and Norway’s jointly developed “Sea God”. Compared with HOVs, AUVs have advantages in autonomy, operation range, and economy, but their shortcomings in signal transmission, endurance time, and load capacity cannot be compensated for. Some countries have also made breakthrough progress in research on AUVs. For example, these include “Dive Dragon 3” in China, “REMUS300” in the United States, “HUGIN Endurance” in Norway, and “SeaOtter Mk2” in Germany. Compared with HOVs and AUVs, ROVs have the advantages of greater control precision, greater flexibility and adaptability, stronger power, and greater load capacity [
3,
4]. At present, research on various types of ROVs has made breakthrough progress. Avilash Sahoo et al. [
5] developed a small ROV for river exploration and observation and carried out simulation and operation experiments in the actual underwater environment, which showed good performance. Li et al. [
6] designed an ROV for underwater inspection of deep sea mining and analyzed its hydrodynamic characteristics in detail. The ROV has good hydrodynamic performance. Xu et al. [
7] developed a closed streamlined observation-level ROV, which is mainly used to observe and locate complex underwater environments. Oscar et al. [
8] developed a small observation-level ROV, which is mainly used for underwater inspection and measurement. Aleksey Kabanov et al. [
9] designed and implemented a low-cost multi-functional underwater detection ROV, which can achieve six degrees of freedom operation. The reliability of the ROV was verified by experiments and simulations. In addition to the above ROVs with underwater detection functions, at present, a water wall climbing robot has also begun to be widely used in the field of industrial detection. Du et al. [
10] proposed the design of a modular tracked robot for the detection, operation, and maintenance of paint film on the surface of an offshore wind turbine tower. Zhang et al. [
11] developed a permanent magnet adsorption wheeled robot for weld detection on the surface of a ship. Gao et al. [
12] designed a permanent magnet adsorption wall climbing robot for water-cooled wall thickness detection of electric boilers. Qiu et al. [
13] designed a wall climbing robot for automatic detection of weld defects in large storage tanks. The development of these underwater robots with cleaning, detection, and maintenance functions has also promoted the development of fluid–solid coupling theory, digital twin technology, and multi-information fusion technology [
14,
15,
16,
17].
In summary, the above-mentioned ROVs focus on the design of the ROV itself without overall consideration of the design of the ROV’s entire hardware and software system; the ROV designed can only complete single detection work, and it does not have the ability to complete work underwater and on water at the same time. To this end, this paper designs a complete set of ROV systems. Firstly, based on the idea of modularization, a new ROV is designed. The new ROV integrates the functions of traditional ROVs and the wall climbing robot. It not only has the ability of underwater detection of the above underwater observation robot but also the ability to climb the wall on the water for detection. Therefore, the new ROV has more application scenarios. The new ROV is mainly composed of the ROV buoyancy body in the upper part and the electromagnetic adsorption chassis in the lower part. The electromagnetic adsorption chassis can be disassembled, and the upper part of the ROV buoyancy body can be operated independently. The lower part of the electromagnetic adsorption chassis can walk on the ground and climb the metal wall. The installation holes are reserved on the electromagnetic adsorption site, and other equipment, such as manipulators, can be installed according to the work requirements to complete the expansion of ROV functions. Secondly, the structure design of a portable ground control box for real-time control of the ROV is completed. The control box integrates the operation, monitoring, and communication functions of ROVs and adopts industrial-grade hardware and redundant design. In addition, a large-capacity rechargeable lithium battery is installed inside of the control box, which can supply power to the entire ROV system and meet the use requirements of the entire system without a power supply. Finally, a set of control systems is designed independently, including upper computer control software and a lower computer control program. The control system can realize all of the functional requirements of the ROV and realize the integrated design of a high-efficiency, real-time, interactive, and reliable control system.
The underwater motion ability of the detection ROV is key to the design. Therefore, it is necessary to study the thrust allocation and use corresponding methods to optimize it so as to ensure the rationality of its thrust allocation and the stability of its motion control. At present, common thrust allocation methods include the direct logic method, the pseudo-inverse method, the sequential quadratic programming method, the intelligent optimization algorithm, and so on. The advantages of the direct logic method and the pseudo-inverse method are simple in principle, and they are fast in finding solutions, but the two methods cannot solve the problem of over-saturation of thrust output when applied to some special thruster layouts. The advantage of the sequential quadratic programming method is that the operation speed is fast, which can improve the control efficiency of the propeller. Intelligent algorithms can now be used for thrust distribution, including neural networks, particle swarm optimization, genetic algorithms, etc. The algorithm principle is more complex, and the calculation amount is large [
18,
19,
20]. Li et al. [
21] proposed a thrust allocation method combining six degrees of freedom control normalization and the pseudo-inverse method. The simulation results show that this method can effectively solve the thruster saturation problem caused by the direct pseudo-inverse method, and it can be directly applied to solve the engineering problem of vector propulsion underwater vehicle motion control. In order to study the influence of the installation position and the installation angle of the horizontal propeller of the remote-controlled unmanned submersible in the three motions of ROV surge, sway, and yaw, Chen et al. [
22] determined the installation angle of the propeller according to the specific working environment of the small ROV and proposed a horizontal propeller thrust distribution method combining power normalization and sequential quadratic programming. The rationality and effectiveness of this method for thrust distribution were verified through simulation. Vishakh et al. [
23] designed and implemented an adaptive thrust allocation algorithm in an already powerful control system to maximize the operational efficiency of the continuous split hull underwater vehicle. Katherine et al. [
24] used a genetic algorithm to distribute the thrust of the thruster according to the vector arrangement of the thruster of the designed ROV and achieved reasonable thrust distribution. In order to reduce the power consumption and hardware wear of ship dynamic positioning, Liu Ming et al. [
25] proposed an improved dung beetle thrust allocation algorithm (IDBO) to solve the problems of low accuracy and ease of falling into local extremum points in the traditional thrust allocation algorithm. The simulation results show that the convergence speed of the algorithm is better than that of the contrast swarm intelligence algorithm, and the thrust allocation’s accuracy and energy consumption are also significantly better than those of all of the comparison algorithms. In the above research, the thrusters of the underwater vehicle are arranged in a relatively simple horizontal and vertical arrangement. The thrust component and the torque generated by each thruster are less coupled. The thruster arrangement adopted in this paper means that the thrust and the torque generated by each thruster have greater coupling. Because the designed ROV has a chassis structure and the structure is more complex, it is more important to solve the thrust distribution problem. In this paper, the direct logic method and the sequential quadratic programming method are used to compare the thrust allocation, and the mathematical model of the propulsion system is established. The thrust allocation simulation model is established in MATLAB and Unity 3D, and the simulation and analysis are carried out. Finally, the underwater attitude control experiment based on thrust allocation and the underwater practical scene application experiment are carried out. Through various simulations and experiments, the feasibility of the sequential quadratic programming method for thrust distribution optimization is verified, and the entire ROV system can meet the expected design requirements.
2. System Composition and Principle
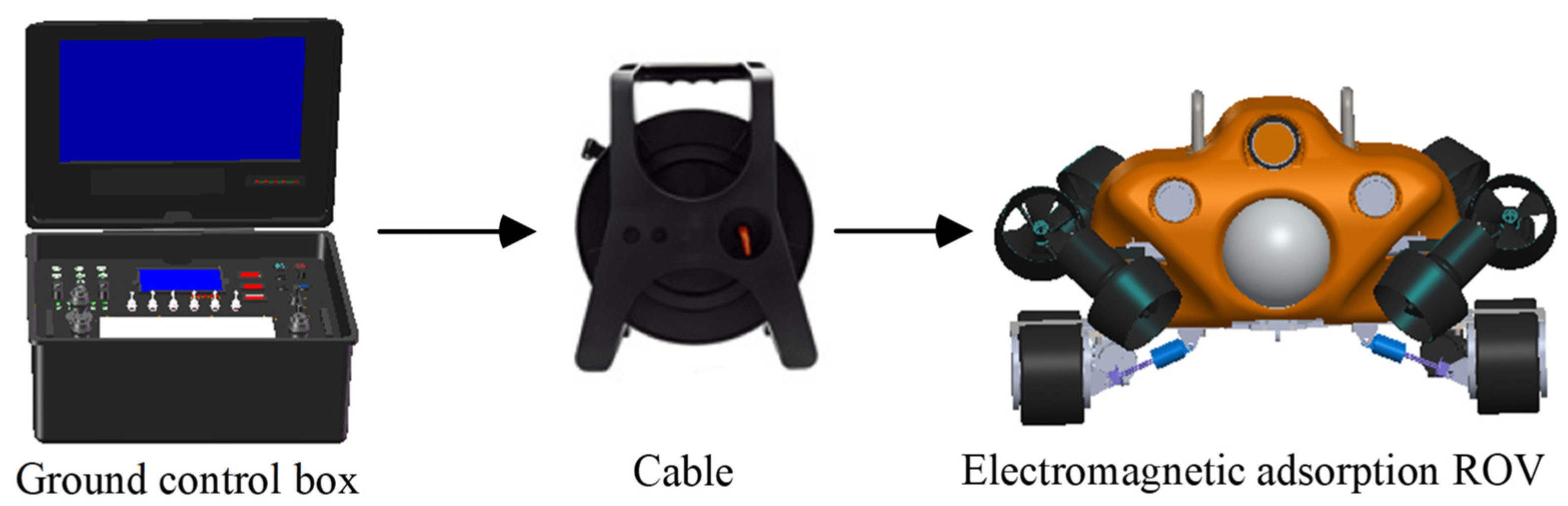
The new ROV system mainly includes the structural system, composed of the ROV and the control box, the control system, composed of the lower computer control program, and the upper computer software. The overall structure of the new ROV system is shown in
Figure 1.
The new ROV is mainly composed of the ROV’s buoyancy body in the upper part and the electromagnetic adsorption chassis in the lower part. Because of the special structural design of this ROV, it can complete the conversion of different motion forms. When it is on the ground, the motor on the chassis can be controlled to drive the tire to complete forward, backward, turning, and other actions or the electromagnetic adsorption force on the chassis can be controlled to complete the wall climbing motion on the metal wall. The electromagnetic adsorption chassis of the ROV can be disassembled, and the ROV’s buoyancy body after disassembly can operate independently underwater. The portable ground control box is mainly composed of a control panel, a display screen, an embedded computer, a lithium battery, and other modules. It is connected to the ROV through an umbilical cable to realize power supply and control of the ROV.
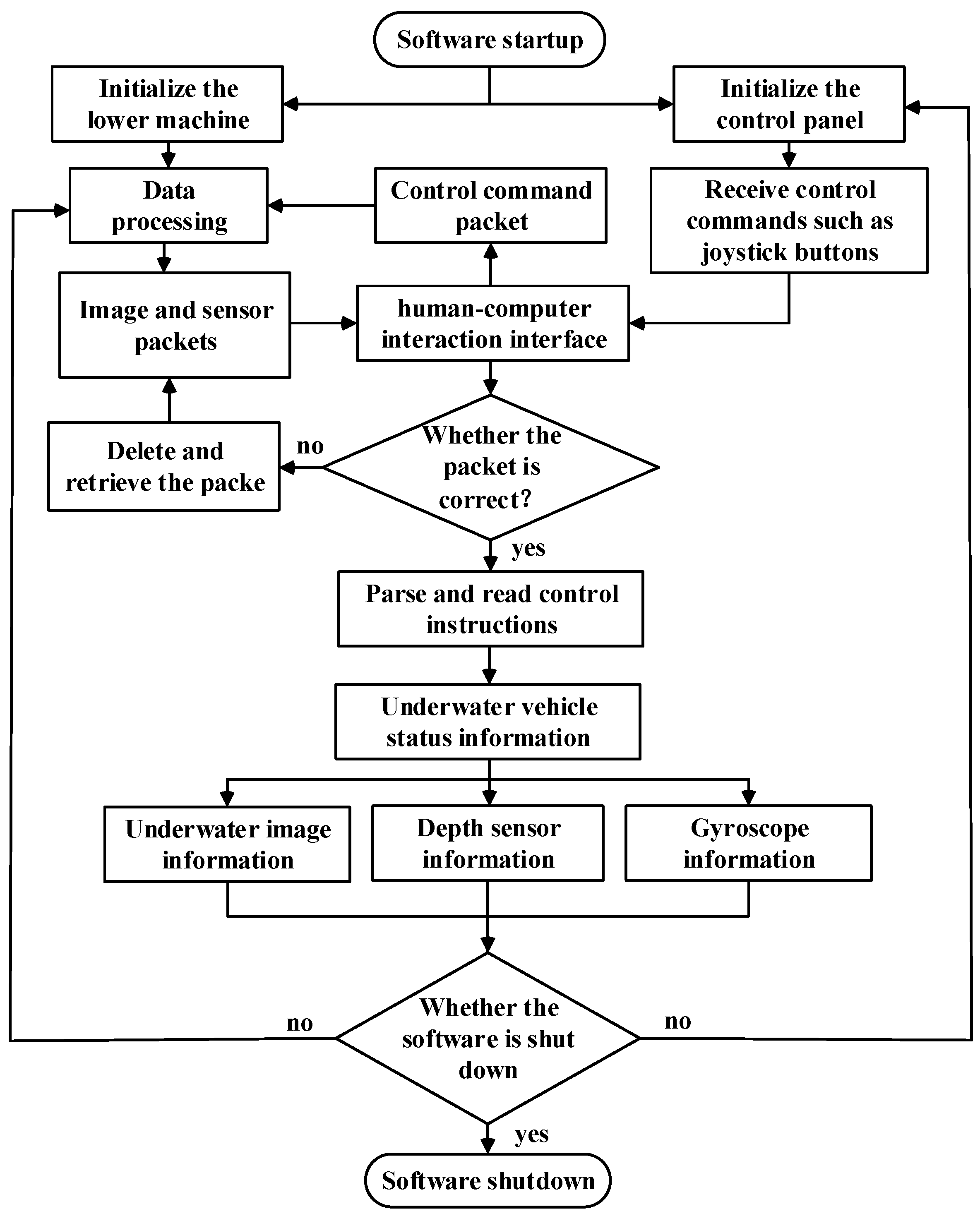
In the control system, the upper computer software visualization window in the portable ground control box can observe the ROV’s video, depth, angle, and other information fed back by the lower computer in real time. The lower computer program is mainly used to analyze and execute various instructions of the upper computer and transmit the instructions to the thrusters, lighting, and other equipment. The upper computer and the lower computer communicate through the power carrier.
3. Structured System Design
3.1. New ROV Structure Design
The new ROV is mainly composed of a buoyancy body and an electromagnetic adsorption chassis. The buoyancy body is mainly composed of an electronic cabin, an installation frame, and buoyancy material.
The electronic cabin mainly plays a protective role for its internal electronic equipment. In this paper, the electronic cabin adopts a cylindrical design; the transparent part of the top is acrylic material, and the rest is made of aluminum alloy material. There are two circles of o-shaped grooves at the bottom of the sealing flange and one o-shaped groove at the top. Installation with a sealing ring can achieve better pressure resistance. The interior is equipped with a three-layer circuit board, multiple sensors, and a single degree of freedom pan–tilt camera that can adjust the pitch angle.
The installation framework is the bearing module of the ROV. As shown in
Figure 2, the installation frame is made of aluminum alloy, and modules, such as the propeller, the buoyancy material, the electronic cabin, and the electromagnetic adsorption chassis, are fixed onto the aluminum alloy frame. This installation method will make the structure of the ROV more compact and stable. It also gives the whole ROV characteristics of modularization, and the other modules on the ROV can be redesigned according to the relevant requirements. If the size of the original installation hole is retained, the newly designed module can still be installed onto this framework. This design gives the ROV’s structure potential for further optimization.
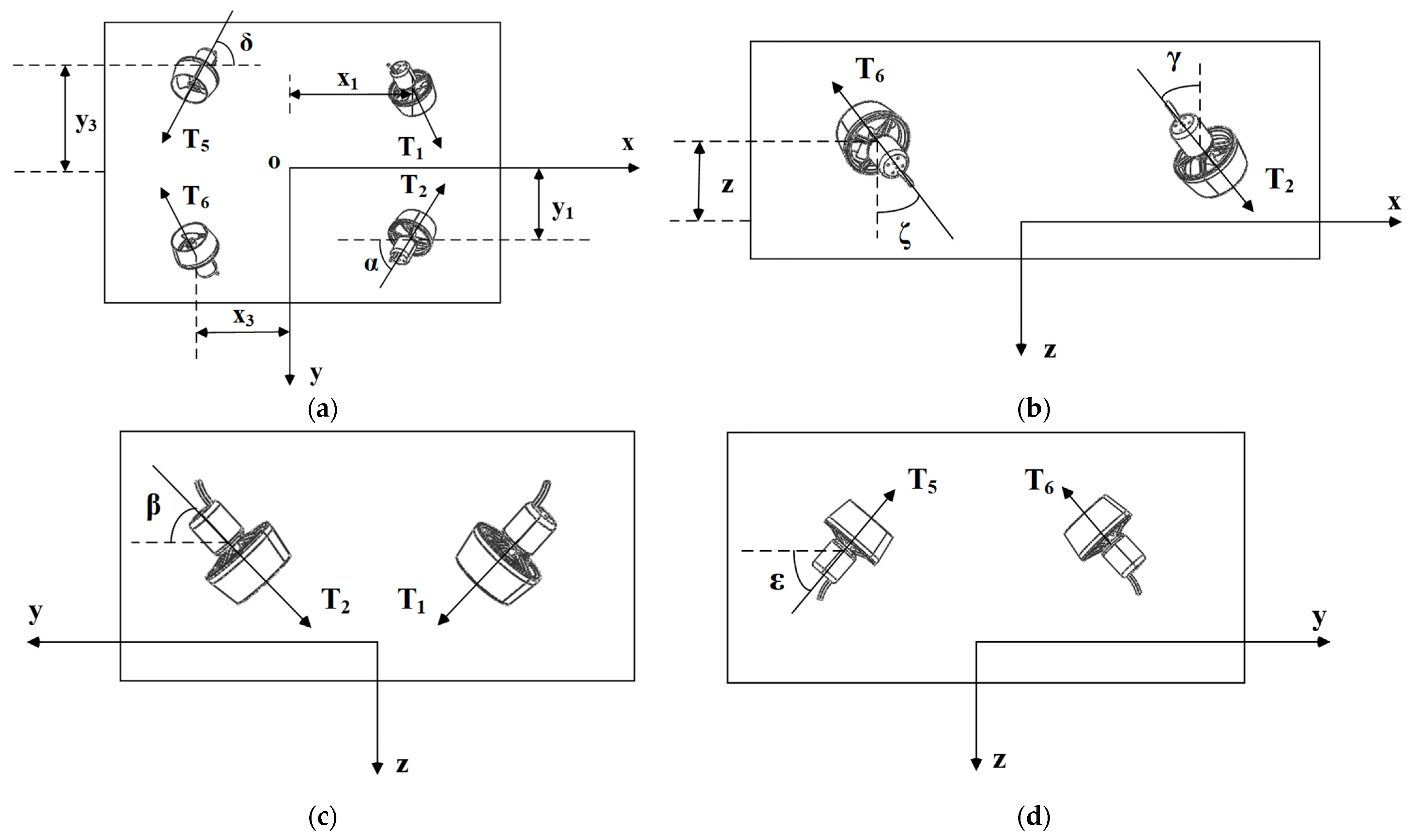
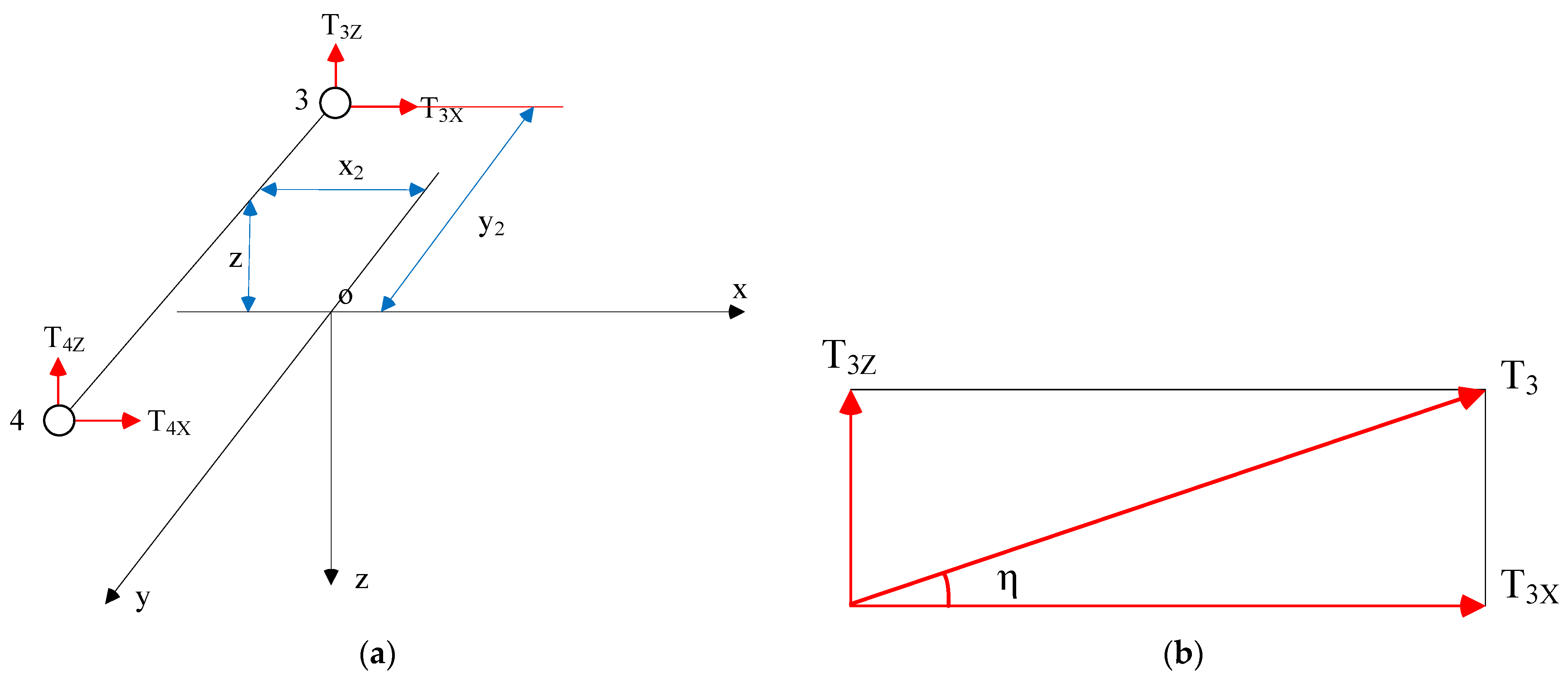
The propeller mainly plays a role in providing power to the ROV. The newly designed ROV is equipped with six propellers. The propeller adopts a more flexible arrangement. The thrust has sufficient force in three degrees of freedom in the longitudinal, transverse, and vertical directions so that the ROV can complete movement in these three directions. The thrust component can produce torque on each axis so that it has enough torque on the other three degrees of freedom to complete rolling, pitching, and yawing motions. The thruster used in the ROV designed in this paper has the advantages of small size, light weight, good sealing, large thrust, low power consumption, and high efficiency. The main performance parameters of the propeller are shown in
Table 1.
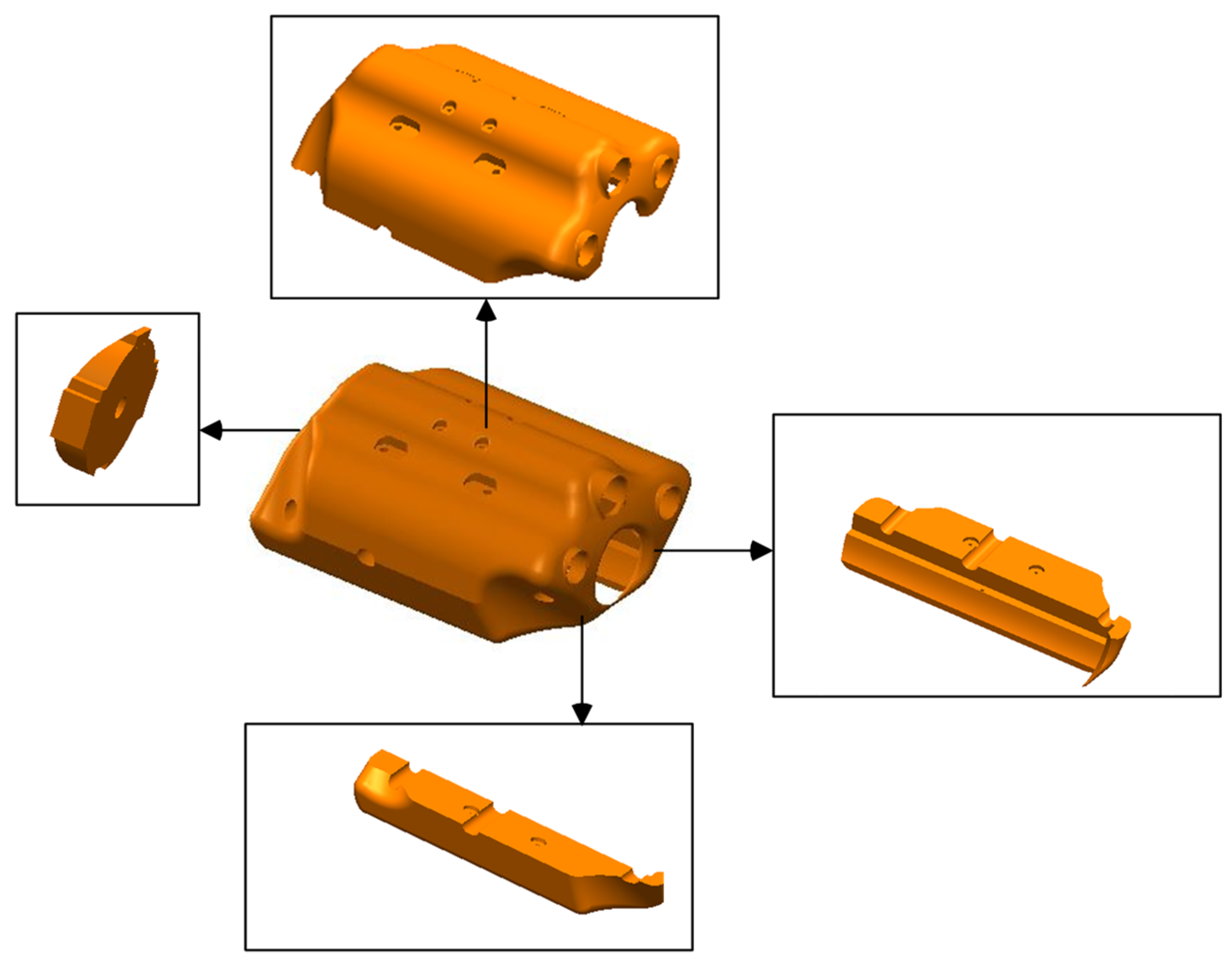
The ROV uses a buoyancy material with a density of 0.25
. While meeting the basic buoyancy requirements of the ROV underwater, the shape of the buoyancy material is designed to be streamlined as much as possible to reduce the resistance of the ROV during operation. As shown in
Figure 3, the buoyancy material is composed of four parts, which are fixed on the mounting bracket during installation. The large hole in the middle of the front end of the buoyancy material is used to install the aluminum alloy frame and the electronic cabin. The two symmetrical holes above are used to install the waterproof lighting. The top hole is installed with a monocular camera for underwater visual auxiliary observation.
In the past, most magnetic adsorption chassis adopted the track structure, and the permanent magnet was installed on the track to give the ROV the function of climbing the wall. However, this scheme has obvious disadvantages. First, the track may be loosened during long-term operation, affecting its overall adsorption capacity. Secondly, the permanent magnet is installed on the track, and its magnetic force cannot be changed in the operation of the ROV. If you want to change the size of the adsorption force, you can only change the model of the magnet or change the arrangement density of the magnet on the track, which undoubtedly brings trouble to installation and disassembly. Therefore, this paper designs a structure of a wheeled electromagnetic adsorption chassis, as shown in
Figure 4. Five electromagnets with a maximum adsorption force of 150
are installed at each end of the chassis. The magnetic force of the electromagnet can be adjusted based on the current size. It can also change the gap between the electromagnet and the contact surface of the chassis by twisting the nut at the upper end of the magnet, thereby changing the magnetic force. The horizontal connection mounting plate is mainly connected by the hinge and the side vertical baffle, and two spring shock absorbers are installed at each end. Under the action of the spring shock absorber, the vertical modules on both sides can bend inward at a certain angle so that they can move on the metal wall with different curvatures. The entire electromagnetic adsorption chassis is equipped with two DC motors to drive the tires [
26,
27,
28].
After assembling each module, the overall structure of the new ROV is shown in
Figure 5, and its related design parameters are shown in
Table 2.
3.2. Portable Ground Control Box Structure’s Design
In order to realize control of the new ROV, a portable ground control box integrating control and monitoring is designed. It mainly controls the ROV’s motion through the rocker, knob, and button on the control panel, and it obtains the ROV’s operation information in real time through the visual window of the host computer software. The design of the control box can be divided into three parts, which are the design of the control panel, the design of the hardware installation in the lower box, and the installation design of the upper box’s cover display.
The control panel integrates all rockers, knobs, buttons, etc. that can directly control the ROV. As shown in
Figure 6, nine metal waterproof buttons are installed on it for the selection of ROV control modes, such as forward and backward, automatic depth determination, and automatic bow determination mode switching. Six simulation knobs are used to adjust the target depth and angle when the ROV is fixed in depth and heading. Six green LED lights mainly play a role in indicating the rocker switch. Six 2-gear, 2-leg button switches are mainly used to control the opening and closing of the ROV’s lights. Of the two power switches, one is used to control the on–off mode of the overall power supply, and the other is used to control the on–off mode of the ROV’s power supply. In the power supply circuit of the ROV, the maximum fuse current of the fuse is 10 A, which effectively ensures the safety of the ROV’s power supply circuit. The USB 3.0 interface and the network port can be directly connected to the embedded computer without opening the control panel for data transmission and software updates. Three LED digital tube display screens are used for current and voltage display. The embedded metal keyboard is used as the input of the computer in the control box. Three analog rockers are used to control the underwater motion of the ROV. Two digital joysticks are used for control of the ROV’s chassis motor. Two handles are installed on both sides of the control panel, which facilitates the installation and disassembly of the control panel. The parts on the ROV’s control panel are designed with redundancy. When the ROV’s function is expanded, the connection between the control hardware on the panel and the ROV’s expansion function can be established by updating the host computer software to realize control of the ROV’s expansion function.
The lower box is mainly used as the installation space for hardware equipment, such as the control panel, the embedded computer, the switching power supply, the power carrier module, the DC contactor, and the lithium battery. Firstly, the fixed frame is designed and installed inside of the box, and the guide rail is installed on the frame so that other equipment can be fixed on the frame through the guide rail buckle. The embedded computer has the basic functions of all computers, but it has a smaller body and a lighter weight than a desktop computer or a laptop, so it is more conducive to assembly in the control box. Two rail-type switching power supplies are used for converting the introduced alternating current into the voltage or current required in the control box. One end of the power carrier module is connected to the embedded computer through the network port, and the other end is connected to the ROV’s electronic cabin through the cable to realize real-time, high-speed communication between the upper computer and the lower computer. The on–off mode of the DC contactor is controlled by the button switch on the control panel, and the output end is connected to the ROV through the cable, which mainly plays the role of protecting the ROV’s power supply line. The control box can supply power to the overall equipment and the ROV by connecting AC power, and a lithium battery can also be installed inside, which can meet the use requirements of the system without an external power supply.
An aluminum alloy mounting plate was designed. The display screen and related electronic drive accessories and adjustment buttons are fixed on the mounting plate through the angular code, and the mounting plate is fixed inside of the upper cover of the control box. The screen and related components are covered and protected by a hard sponge lining.
Finally, each module of the control box is assembled and connected. The internal wiring diagram and the physical diagram of the control box are shown in
Figure 7.
6. Simulation Analysis of Thrust Allocation
6.1. Direct Logic Method
Assuming that the ROV is affected by the longitudinal thrust, the lateral thrust, and the pitching moment, it presents a compound motion state. According to the characteristics of the vector arrangement of the ROV thrusters, the longitudinal thrust, the lateral thrust, and the pitching moment can be distributed according to the following formula, such that the expected thrust , , , , , and of each thruster is as follows:
The expected distribution thrust of the No. 1 thruster:
The expected distribution thrust of the No. 2 thruster:
The expected distribution thrust of the No. 3 thruster:
The expected distribution thrust of the No. 4 thruster:
The expected distribution thrust of the No. 5 thruster:
The expected distribution thrust of the No. 6 thruster:
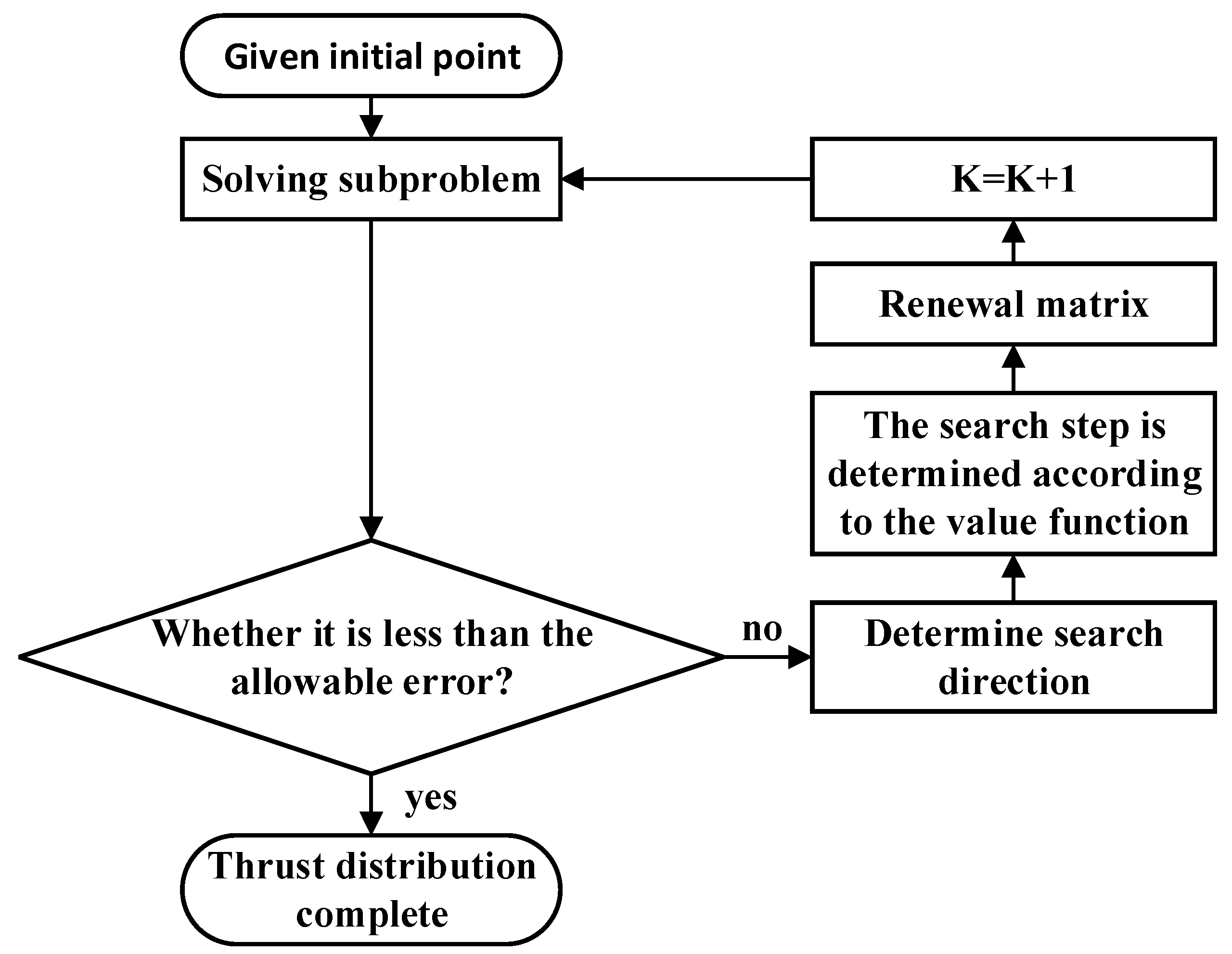
6.2. Sequential Quadratic Programming Method
The essence of using SQP to solve the optimal solution is to solve a series of quadratic programming subproblems. For nonlinear constrained optimization problems [
33,
34,
35],
In the formula, is a variable, is an objective function, is a nonlinear equality constraint, and is a nonlinear inequality constraint.
Let be the sequence set of equality constraints and let be the sequence set of inequality constraints.
The equation constraint can be written as
The inequality constraint is notated as
Nonlinear constrained optimization can be written as
Then, the Lagrangian function of the above equation is
where
and
are Lagrangian ordinary numbers.
and
are the Jacobi matrices:
Then, the gradient vector of the Lagrangian function is
where
is the gradient of
.
The Jacobi matrices with respect to
,
, and
are
In the formula,
is the Hessian matrix of
.
Then, the Karush–Kuhn–Tucker (derivative with respect to the Lagrangian) condition for the above equation is
The Taylor expansion of the above equation is equivalent to finding an optimal solution to a quadratic programming problem:
The basic process of the sequential quadratic programming method is shown in
Figure 17.
6.3. Objective Function and Constraint Conditions of Thrust Allocation
The objective function of thrust allocation can be set to [
36,
37,
38]
In the formula, is the azimuth angle of each propeller; is the thrust generated by each propeller; and, as a relaxation variable, is a column matrix, which represents the difference between the thrust input by the controller and the thrust after the thrust synthesis output so as to ensure that the thrust allocation problem always has a feasible solution.
The definition of the right end of the above equation is as follows:
The first term is used to optimize energy consumption. is the energy consumption weight matrix, which is a diagonal matrix. The weight of energy consumption in each optimization objective can be changed by changing its size. Optimizing this item can also reduce the wear degree of the propeller and make the propeller work more safely and stably.
The second term belongs to the penalty term. is also a diagonal matrix, which can determine the weight of the error value of input and output in the objective function by changing the value of .
The third item is set to avoid the singular structure of the thruster, where is the number greater than 0 and a is the weight of the optimization item in order to avoid the denominator being 0.
According to the analysis of the actual situation of the ROV, the constraints of thrust distribution are divided into equality constraints and inequality constraints.
The equality constraint is
In the formula, is the input thrust of the controller and is the vector layout matrix of the propulsion system.
The constraint condition represents the relationship between the error between the input of the controller and the output of the thrust synthesis and the relaxation variable, allowing the existence of the error, in order to better complete the task of thrust distribution.
The inequality constraint is
In the formula, is the minimum thrust of the propeller, is the maximum thrust of the propeller, and is the thrust at the previous moment.
This constraint limits the output range of the propeller, which can prevent the loss of the propeller and the low efficiency of the underwater operation caused by exceeding the maximum thrust.
6.4. Establishment of the Simulation Model
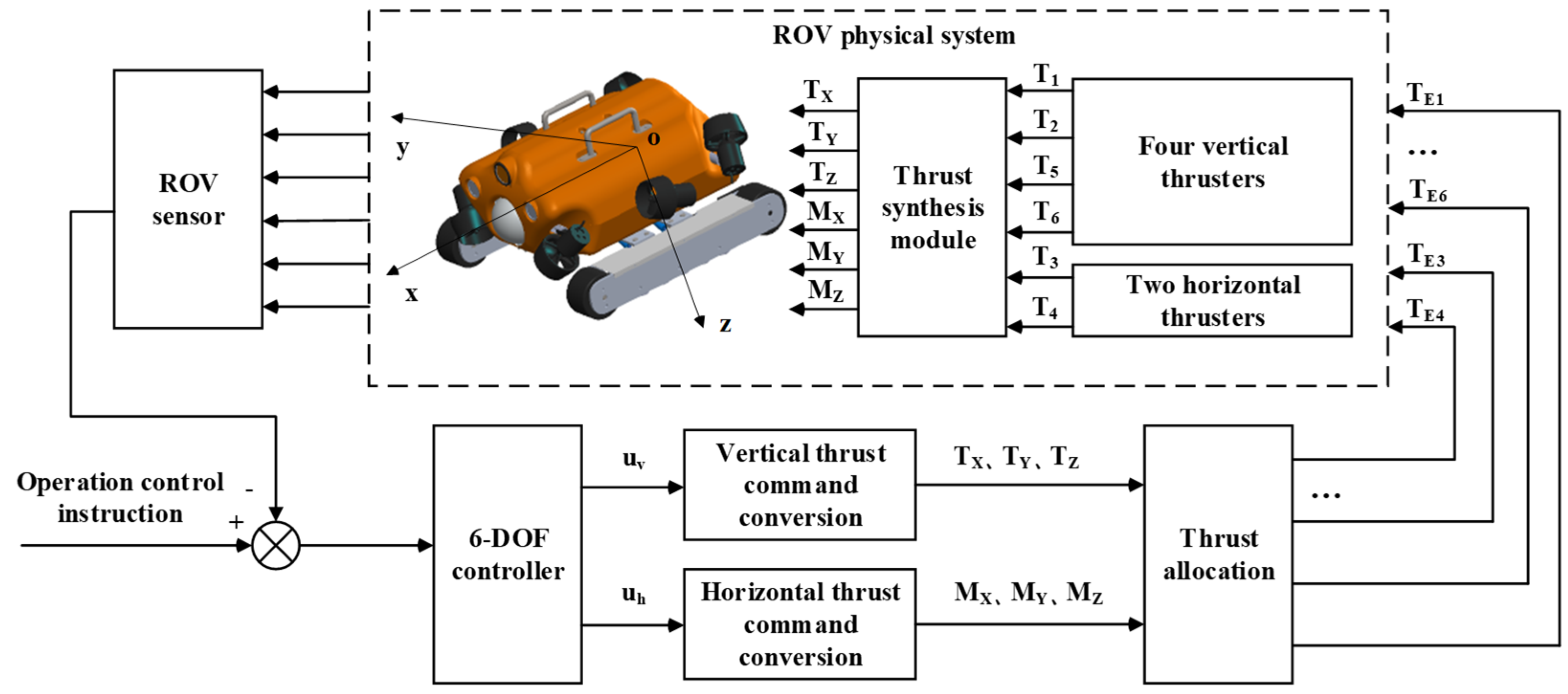
According to the principle of ROV motion control and the needs of practical work, the composition and the working principle of the motion control system are shown in
Figure 18 [
39,
40].
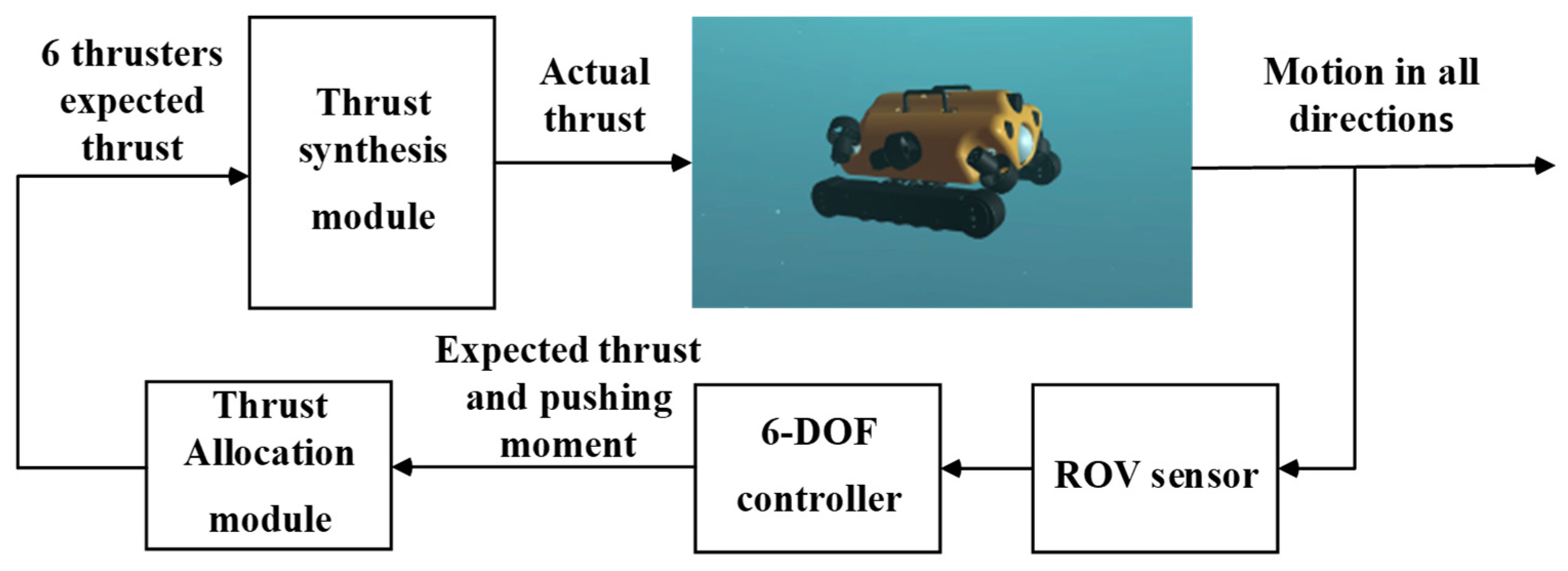
According to the composition and working principle of the above control system, in the process of simulation, the basic model of simulation is shown in
Figure 19.
The simulation model of the ROV control system is mainly composed of several modules in the above figure. The 6 degrees of freedom controller reads the control input of the rocker to obtain the expected thrust and torque of a certain degree of freedom. The thrust distribution module calculates the thrust and the thrust required for each thruster. The thrust synthesis module synthesizes the components of the six thrusters to determine the actual thrust and the thrust torque required for the ROV’s motion, and then it drives the ROV’s motion. Because the control system is a closed-loop system, the actual motion of the ROV can be returned to the 6 degrees of freedom controller through the sensor module, and real-time adjustment of the ROV’s motion can be completed.
6.5. Thrust Distribution Simulation Analysis
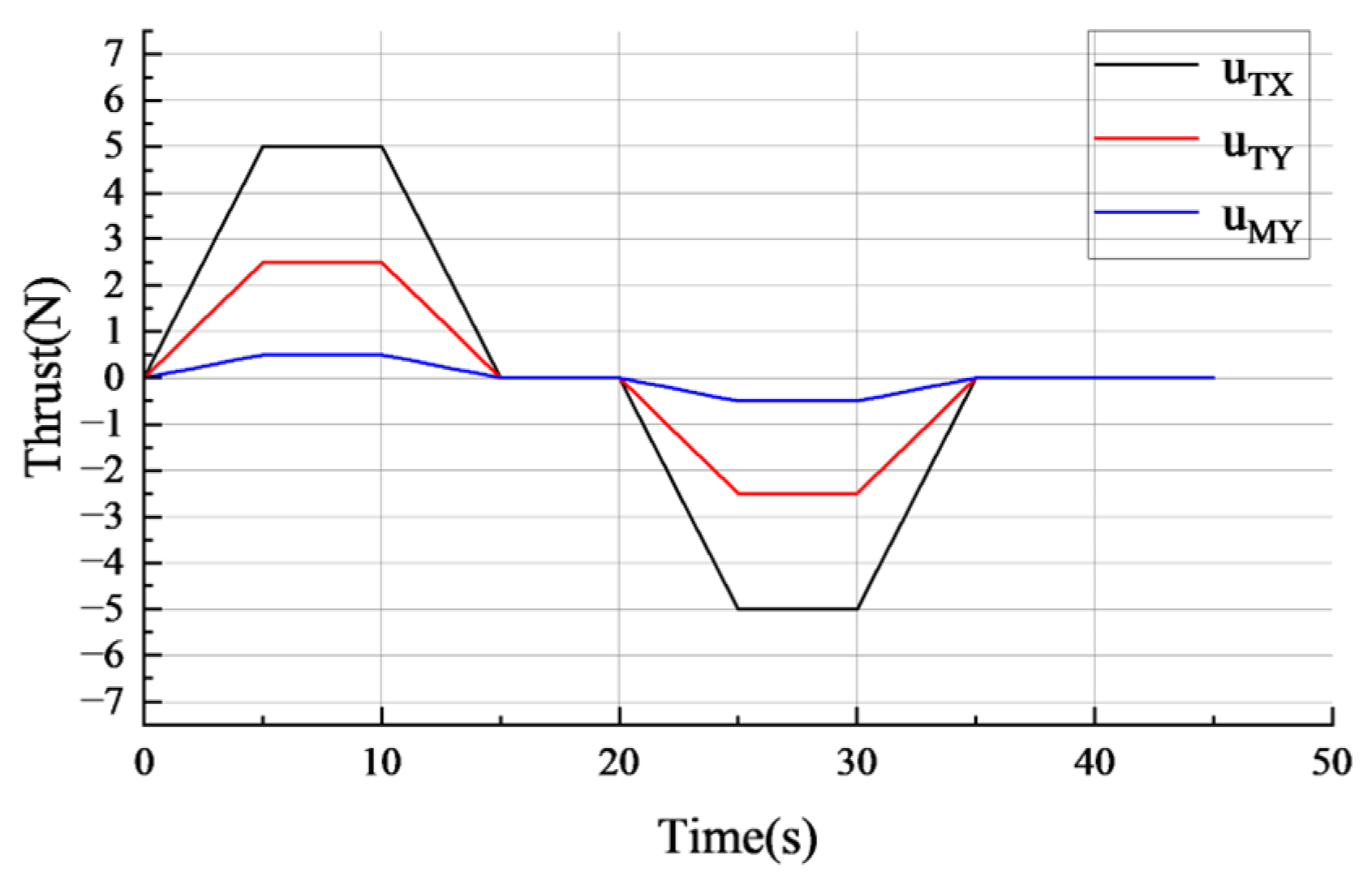
The simulation model of the new ROV’s motion control and thrust allocation is established in MATLAB, and thrust allocation is carried out using a direct logic method and a sequential quadratic programming method. The rocker is used to randomly input the voltage of three degrees of freedom of longitudinal, transverse, and pitch output. Firstly, the rocker is slowly moved to slowly increase the output voltage. When the output value reaches a certain output value, the rocker is stopped and kept in this state for a period of time. After that, the rocker is slowly released to slowly reduce the output. After reaching the zero input state for a period of time, the rocker is moved backward to obtain the curve of the output voltage of the rocker with time.
It is known that the maximum thrust of each propeller is 35
at forward rotation and 26
at reverse rotation. As shown in
Figure 20,
,
, and
represent the voltage corresponding to the longitudinal, transverse, and rolling output of the rocker, respectively. Where
and when
, the corresponding maximum longitudinal thrust is 128
; where
and when
, the corresponding maximum lateral thrust is 62
; among them, for
, when
, the corresponding maximum rolling moment is 17
.
It can be seen from
Figure 21 that after thrust distribution using the direct logic method and the sequential quadratic programming method, under the direct logic method, the six thrusters, whether forward or reverse, exceed the maximum thrust that may occur in their thrusters to varying degrees, that is, the phenomenon of thrust saturation. This shows that although the direct logic method is simple, it does not consider the maximum thrust limit of the thruster. When running in this state, there will be problems, such as thruster overload, hardware damage, control performance degradation, and increased ROV power consumption. However, under the sequential quadratic programming method, the six thrusters do not exceed their maximum values during forward and reverse rotation, indicating that the sequential quadratic programming method can optimize the thrust distribution of the thruster and avoid oversaturation of the thrust output.
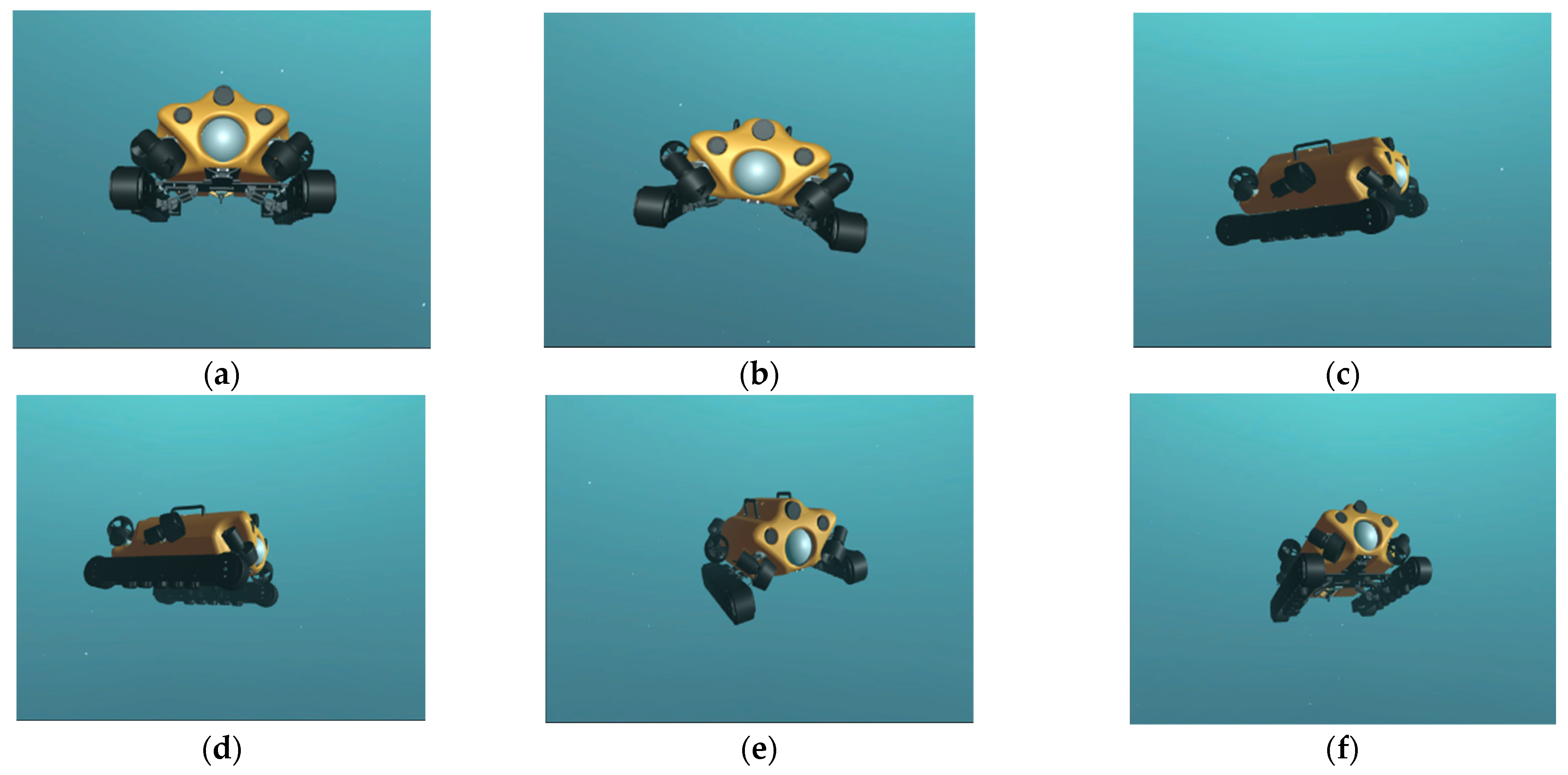
The Unity 3D simulation experiment platform is developed using C# language. The related code for the thrust distribution control algorithm based on sequential quadratic programming is written into a script file in C# language, which is imported into the simulation system and mounted onto the ROV model. This platform simulates the approximate real environment of an ROV working underwater, and the results are more general than those of a MATLAB simulation. By connecting the rocker, different forces or torques are input to the different degrees of freedom of the ROV, and the running attitude of the ROV is observed through the visual window.
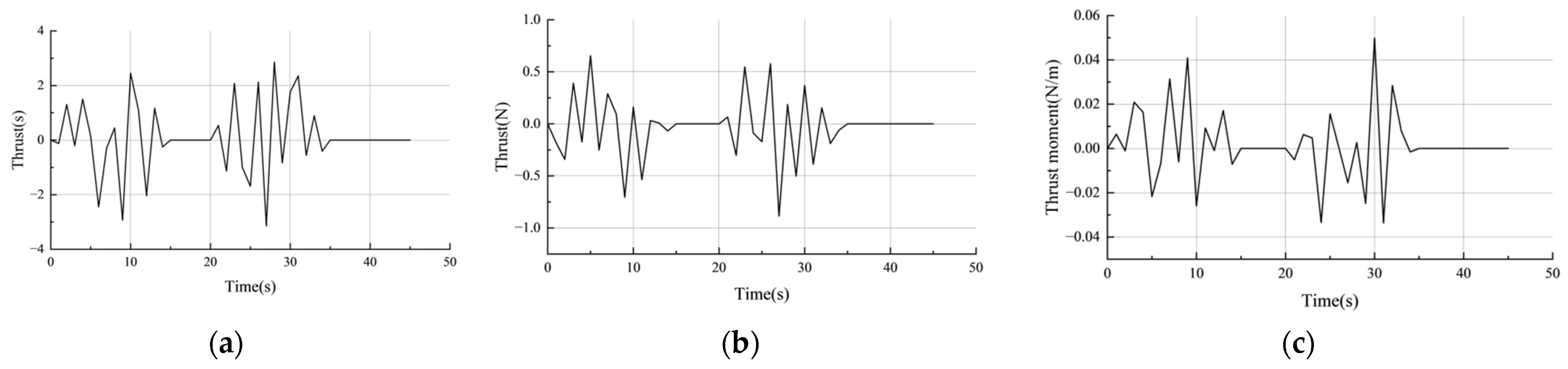
As shown in
Figure 22, the thrust of one degree of freedom, the thrust and torque of two degrees of freedom, and the thrust and torque of three degrees of freedom are input into the Unity 3D platform. The attitude of the ROV in the simulated state can meet the expected control requirements. This simulation further verifies the feasibility of the sequential quadratic programming method to optimize the thrust distribution of the developed ROV.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}