
Valve Internal Leakage Signal Enhancement Method Based on the Search and Rescue Team–Coupled Multi-Stable Stochastic Resonance Algorithm


Abstract
1. Introduction
2. Theoretical Model
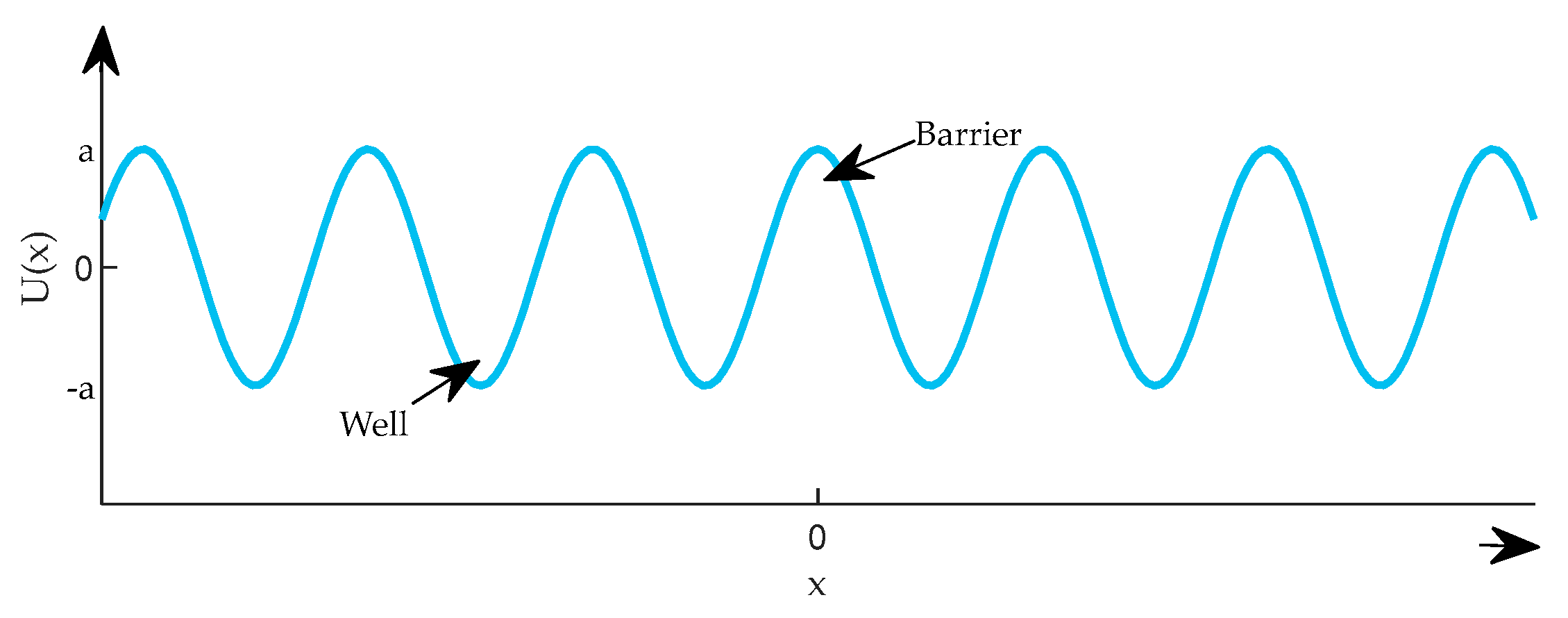
2.1. Coupled Multi-Stable System Model
2.2. System Optimization Evaluation Indicators
2.3. SaRT Optimization Algorithm
3. SaRT-CMSR-Based Signal Enhancement Method
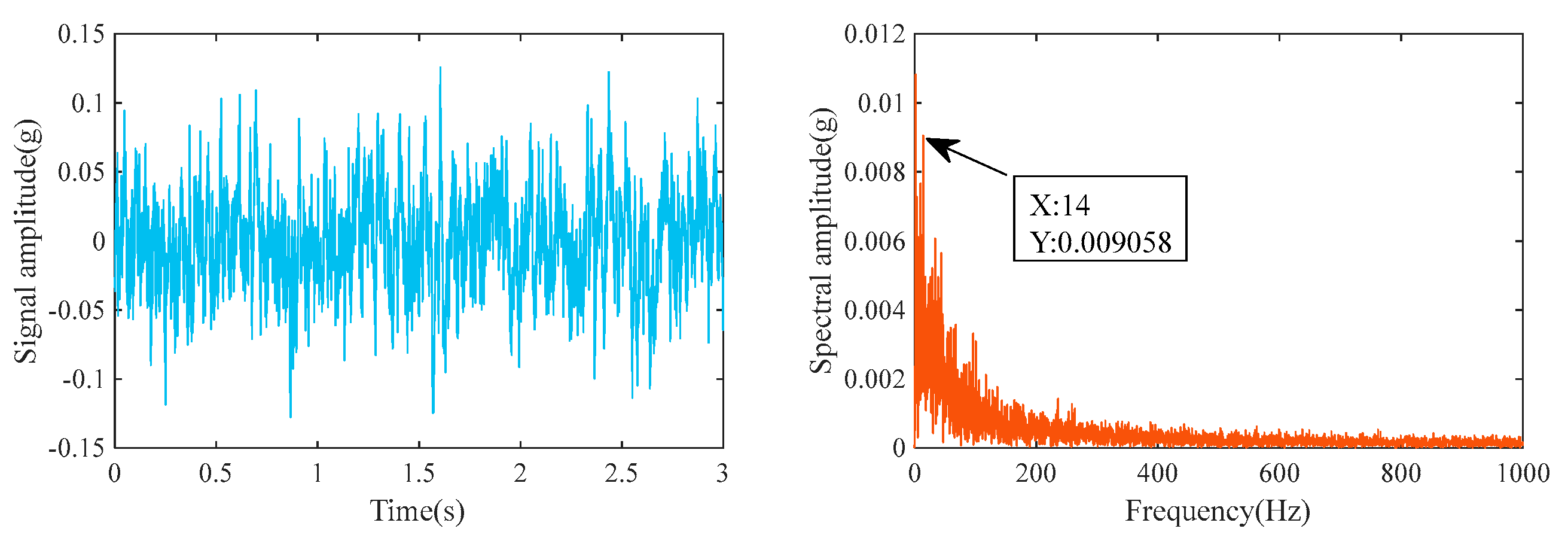
- Spectral Analysis: The Fourier transform is performed on the leakage vibration signal inside the valve to observe the frequency domain characteristics of the original signal;
- Signal Preprocessing: Signal conditioning is implemented through a rescaling transformation, converting the leakage fault signals into small-parameter signals via secondary sampling to facilitate the subsequent processing;
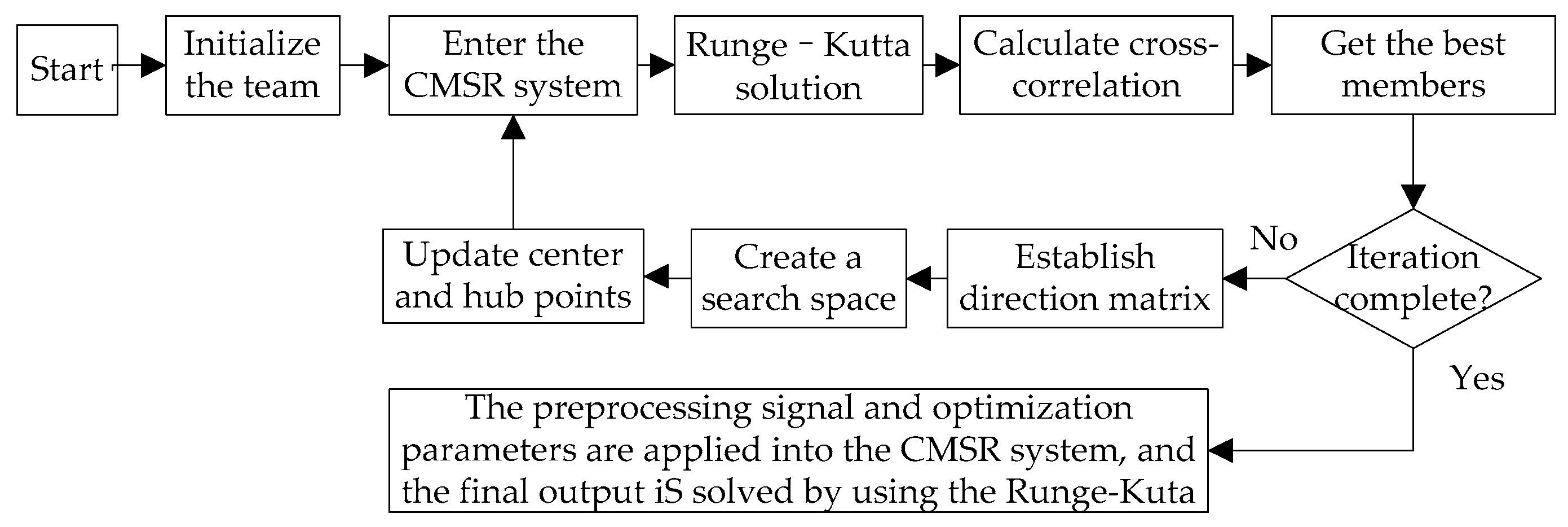
- SaRT Algorithm Initialization: The optimization team parameters are configured, where each member’s parameters are evaluated through the CMSR system. The system output is computed using the fourth-order Runge–Kutta method, with correlation coefficients calculated to identify optimal team members;
- Iterative Optimization: Direction matrices are constructed and search spaces are defined for systematic optimization, providing continuous updates to team members and updating the center points through iterative refinement;
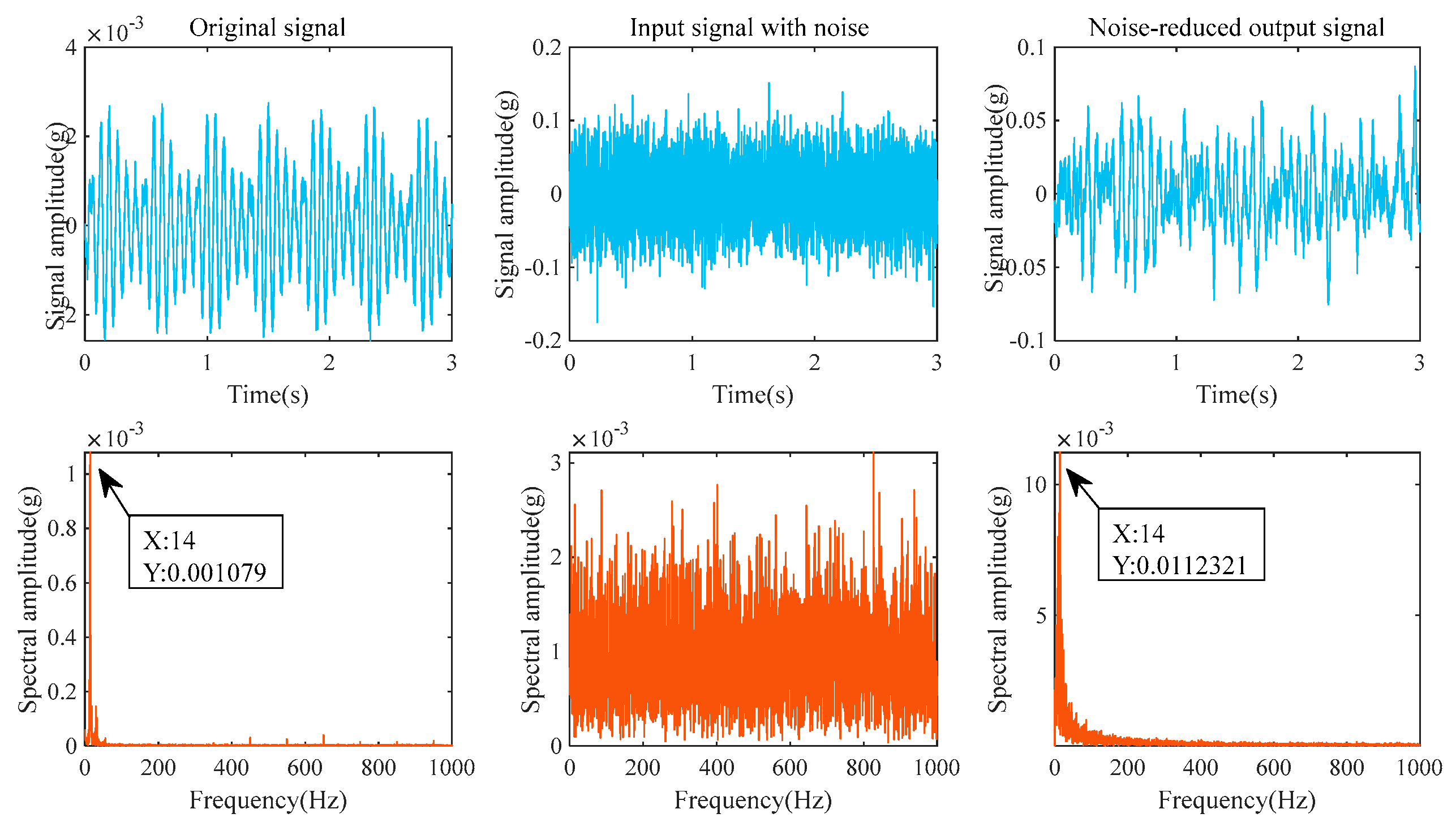
- Final Signal Processing: The optimization parameters obtained in step (4) and the pre-processing signal in step (2) are input into the CMSR system. The fourth-order Runge–Kutta method is used to solve the final output signal, and the noise reduction and feature enhancement of the noisy signal are realized.
4. System Parameter Analysis
5. Verification Based on Leakage Signal in Check Valve
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hou, J.; Li, S.; Yang, L.; Zhang, X.; Zhao, Q. Multi-leakage source localization of safety valve based on improved KDE algorithm. Process Saf. Environ. Prot. 2023, 171, 493–506. [Google Scholar]
- Shen, K.; Zhao, D. An EMD-LSTM Deep Learning Method for Aircraft Hydraulic System Fault Diagnosis under Different Environmental Noises. Aerospace 2023, 10, 55. [Google Scholar] [CrossRef]
- Jegadeeshwaran, R.; Sugumaran, V. Vibration based fault diagnosis of a hydraulic brake system using Variational Mode Decomposition (VMD). Struct. Durab. Health Monit. 2014, 10, 81–97. [Google Scholar]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A 1999, 14, L453. [Google Scholar]
- Gammaitoni, L.; Hänggi, P.; Jung, P.; Marchesoni, F. Stochastic resonance. Rev. Mod. Phys. 1998, 70, 223. [Google Scholar]
- Wang, H.; Xuan, F. Structural damage detection of adaptive tangent-based unsaturated bistable stochastic resonance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 237, 732–747. [Google Scholar]
- Qiao, Z.; Elhattab, A.; Shu, X.; He, C. A second-order stochastic resonance method enhanced by fractional-order derivative for mechanical fault detection. Nonlinear Dyn. 2021, 106, 707–723. [Google Scholar]
- Wang, S.; Niu, P.; Li, Y.; Jia, J.; Wang, S.; Li, H.; Sun, B.; Zheng, B.; Ximin, S. Image denoising using adaptive bi-dimensional stochastic resonance system. Ferroelectrics 2023, 609, 148–157. [Google Scholar]
- Zhou, Z.; Yu, W.; Wang, J.; Liu, M. A high dimensional stochastic resonance system and its application in signal processing. Chaos Solitons Fractals 2022, 154, 111642. [Google Scholar]
- Qin, T.; Zhou, L.; Chen, S.; Chen, Z. The novel method of magnetic anomaly recognition based on the fourth order aperiodic stochastic resonance. IEEE Sens. J. 2022, 22, 17043–17053. [Google Scholar]
- Huang, J.; Zheng, Z.; Zhou, Y.; Tan, Y.; Wang, C.; Xu, G.; Zha, B. Magnetic Anomaly Detection Based on a Compound Tri-Stable Stochastic Resonance System. Sensors 2023, 23, 9293. [Google Scholar] [CrossRef]
- Achim, S.; William, S.; Richard, G.; Claus, M.; Konstantin, T.; Andreas, M.; Holger, S.; Fan-Gang, Z.; Friston, K.J.; Patrick, K. Predictive coding and stochastic resonance as fundamental principles of auditory phantom perception. Brain J. Neurol. 2023, 146, 4809–4825. [Google Scholar]
- Shi, P.; Li, J.; Zhang, W.; Li, M.; Han, D. Characteristic frequency detection of steady-state visual evoked potentials based on filter bank second-order underdamped tristable stochastic resonance. Biomed. Signal Process. Control 2023, 84, 104817. [Google Scholar] [CrossRef]
- Liang, C.; Dou, Z.; Li, L.; Wang, X. An adaptive stochastic resonance detection method based on a fast artificial fish swarm algorithm. J. Phys. Conf. Ser. IOP Publ. 2023, 2517, 012013. [Google Scholar] [CrossRef]
- Hao, J.; Huang, F.; Shen, X.; Jiang, C.; Lin, X. An adaptive stochastic resonance detection method with a knowledge-based improved artificial fish swarm algorithm. Multimed. Tools Appl. 2022, 81, 11773–11794. [Google Scholar] [CrossRef]
- Cong, H.; Yu, M.; Gao, Y.; Fang, M. A new method for rubbing fault identification based on the combination of improved particle swarm optimization with self-adaptive stochastic resonance. J. Fail. Anal. Prev. 2022, 22, 690–703. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, G. Bearing fault-detection method based on improved grey wolf algorithm to optimize parameters of multistable stochastic resonance. Sensors 2023, 23, 6529. [Google Scholar] [CrossRef]
- Zhang, G.; Jiang, C.; Zhang, T.Q. A Novel Adaptive Stochastic Resonance Method Based on Tristable System and its Applications. Fluct. Noise Lett. 2021, 20, 2150004. [Google Scholar] [CrossRef]
- Zhang, G.; Huang, X.; Xu, J.; Li, Z. Adaptive detection of impact signals with two-dimensional piecewise tri-stable stochastic resonance and its application in bearing fault diagnosis. Appl. Acoust. 2023, 214, 109702. [Google Scholar] [CrossRef]
- Suo, J.; Wang, H.; Shen, X.; Yan, Y.; Dong, H. Mutual information-assisted feed-forward cascaded stochastic resonance for large parameter. Nonlinear Dyn. 2023, 111, 19225–19247. [Google Scholar]
- Zhang, J.; Lin, M. Detection of bearing fault signals based on coupled Bistable system stochastic resonance. J. China Univ. Metrol. 2014, 25, 51–56. [Google Scholar]
- Li, M.; Shi, P.; Zhang, W.; Han, D. Stochastic resonance in a high-dimensional space coupled bistable system and its application. Appl. Math. Model. 2023, 113, 160–174. [Google Scholar]
- He, L.; Jiang, Z.; Chen, Y. Unveiling the principles of stochastic resonance and complex potential functions for bearing fault diagnosis. Chaos Solitons Fractals 2024, 180, 114484. [Google Scholar]
- Cui, H.; Guan, Y.; Chen, H.; Deng, W. A novel advancing signal processing method based on coupled multi-stable stochastic resonance for fault detection. Appl. Sci. 2021, 11, 5385. [Google Scholar] [CrossRef]
- Xia, P.; Lei, M.; Xu, H.; Gao, L. Fault diagnosis of rolling bearing based on the three-dimensional coupled periodic potential-induced stochastic resonance. Meas. Sci. Technol. 2024, 35, 046103. [Google Scholar]
- Meng, Z.; Quan, S.; Li, J.; Cao, L.; Fan, F. A novel coupled array of multi-stable stochastic resonance under asymmetric trichotomous noise and its application in rolling bearing compound fault diagnosis. Appl. Acoust. 2023, 209, 109405. [Google Scholar]
- Ai, H.; Yang, G.J.; Liu, W.; Wang, Q. A fast search method for optimal parameters of stochastic resonance based on stochastic bifurcation and its application in fault diagnosis of rolling bearings. Chaos Solitons Fractals 2023, 168, 113211. [Google Scholar] [CrossRef]
- Fauve, S.; Heslot, F. Stochastic resonance in a bistable system. Phys. Lett. A 1983, 97, 5–7. [Google Scholar] [CrossRef]
- Qiao, Z.; Shu, X.D. Coupled neurons with multi-objective optimization benefit incipient fault identification of machinery. Chaos Solitons Fractals 2021, 145, 110813. [Google Scholar]
- Tong, C.; Sepehri, N. Principle and performance validation of search and rescue team algorithm. J. Mech. Sci. Technol. 2024, 38, 6701–6717. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Valve Core | The Number of Relationships Between the Noisy Input Signal and the Original Signal | The Number of Relationships Between the Noise-Canceled Output Signal and the Original Signal | Cross-Correlation Gain |
|---|---|---|---|
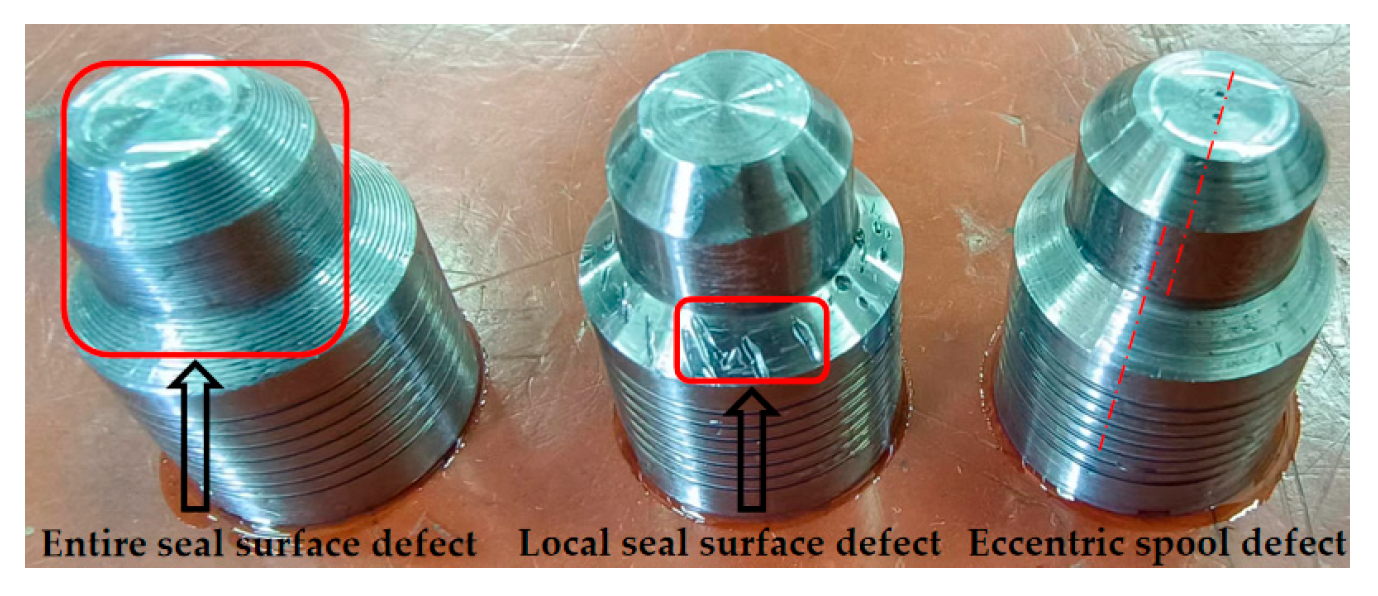
| Entire seal surface defect | 0.0453 | 0.3151 | 6.9569 |
| Local seal surface defect | 0.0436 | 0.1924 | 4.4128 |
| Eccentric spool defect | 0.0691 | 0.3977 | 5.7554 |
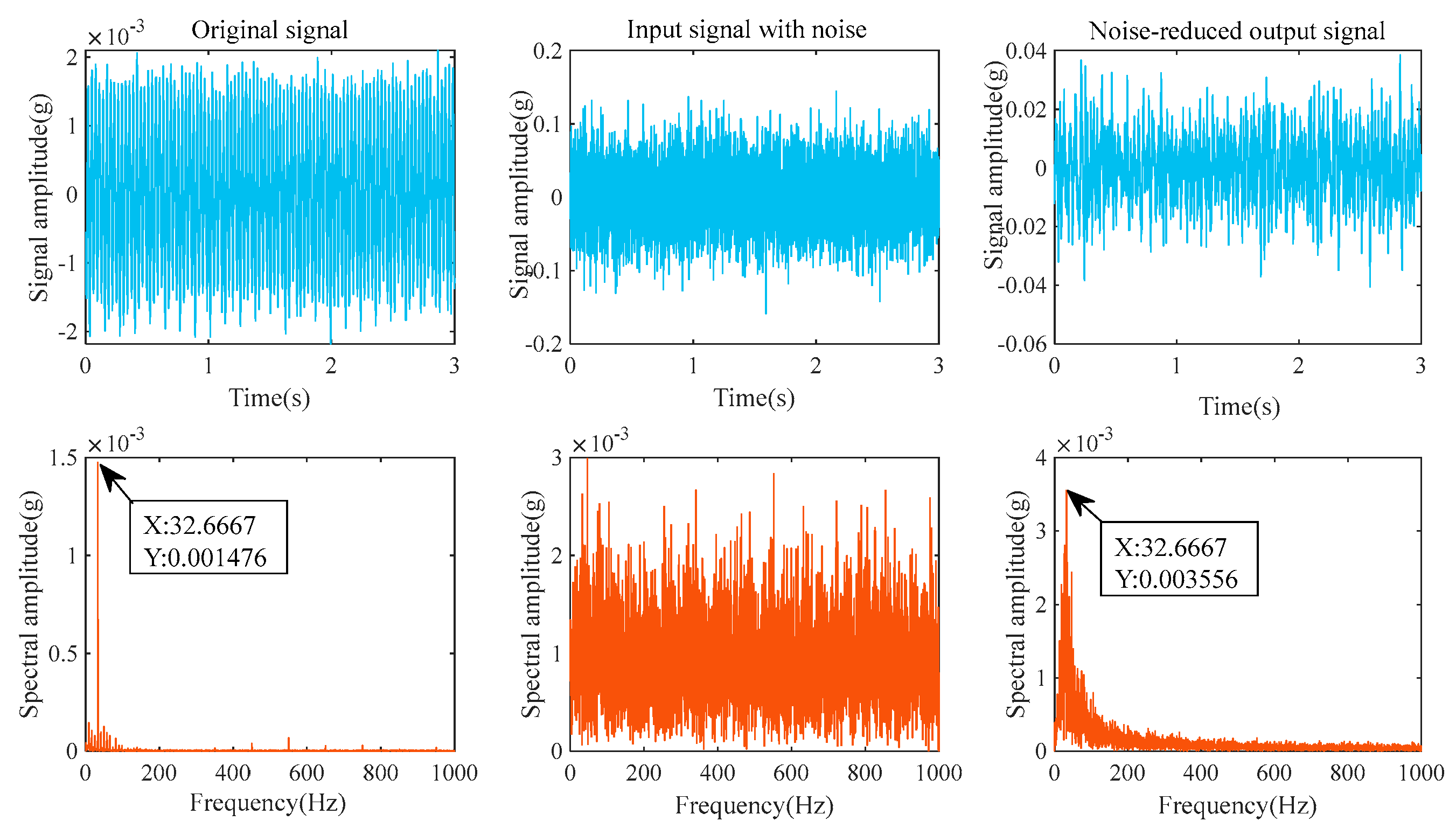
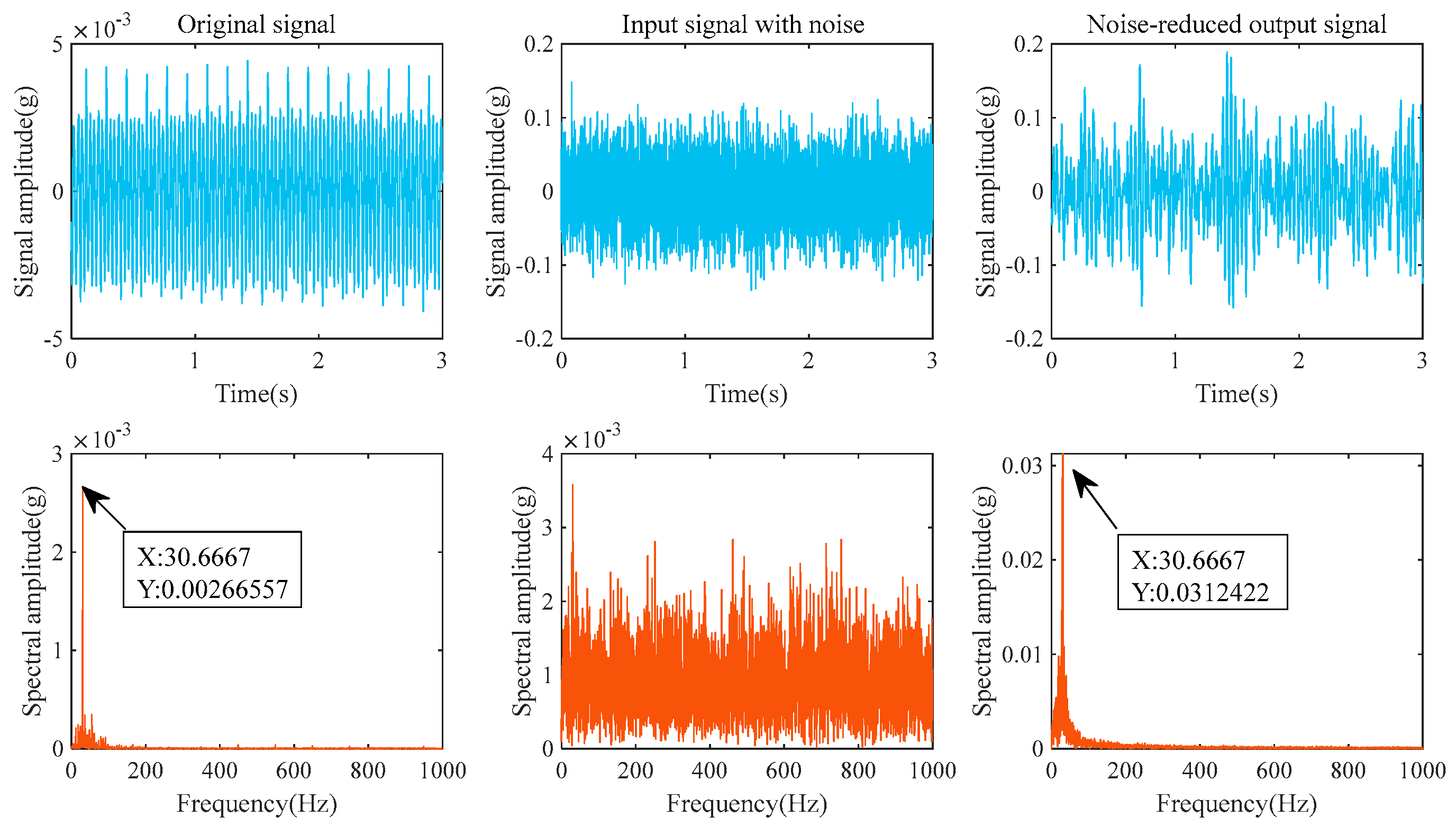
| Valve Core | Original Signal Spectral Amplitude | Output Signal Spectral Amplitude | Is the Peak Frequency Equal | Amplitude Ratio |
|---|---|---|---|---|
| Entire seal surface defect | 0.00108 | 0.01123 | Yes | 10.3981 |
| Local seal surface defect | 0.00148 | 0.00356 | Yes | 2.4054 |
| Eccentric spool defect | 0.00267 | 0.03124 | Yes | 11.7004 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, C.; Zhao, Y.; Xu, X. Valve Internal Leakage Signal Enhancement Method Based on the Search and Rescue Team–Coupled Multi-Stable Stochastic Resonance Algorithm. Appl. Sci. 2025, 15, 3865. https://doi.org/10.3390/app15073865
Tong C, Zhao Y, Xu X. Valve Internal Leakage Signal Enhancement Method Based on the Search and Rescue Team–Coupled Multi-Stable Stochastic Resonance Algorithm. Applied Sciences. 2025; 15(7):3865. https://doi.org/10.3390/app15073865
Chicago/Turabian StyleTong, Chengbiao, Yuehong Zhao, and Xinming Xu. 2025. "Valve Internal Leakage Signal Enhancement Method Based on the Search and Rescue Team–Coupled Multi-Stable Stochastic Resonance Algorithm" Applied Sciences 15, no. 7: 3865. https://doi.org/10.3390/app15073865
APA StyleTong, C., Zhao, Y., & Xu, X. (2025). Valve Internal Leakage Signal Enhancement Method Based on the Search and Rescue Team–Coupled Multi-Stable Stochastic Resonance Algorithm. Applied Sciences, 15(7), 3865. https://doi.org/10.3390/app15073865