
A Comparative Analysis of IMUs and Optical Systems in Layup Shot Biomechanics


Abstract
1. Introduction
2. Materials and Methods
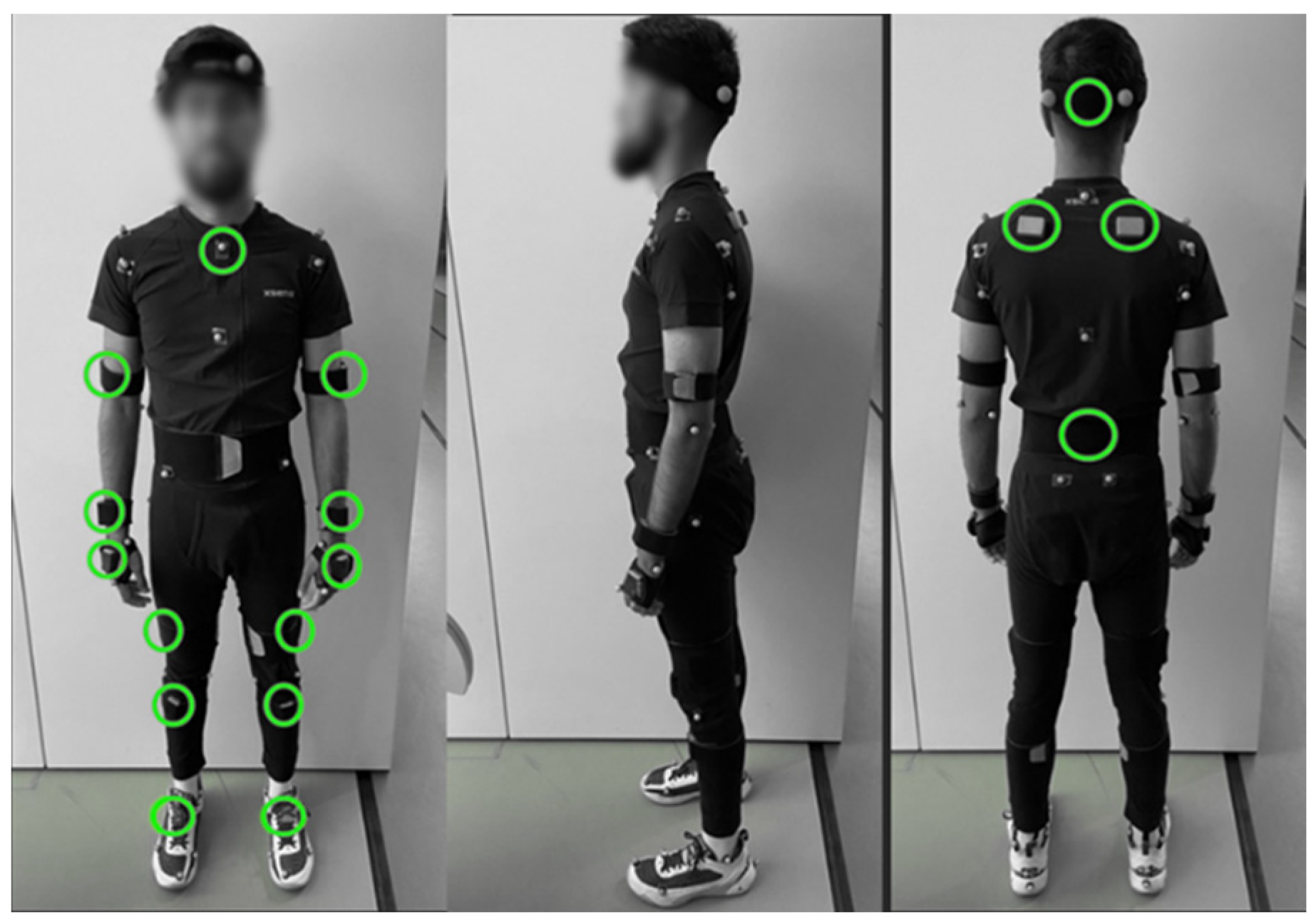
2.1. Participant and Equipment
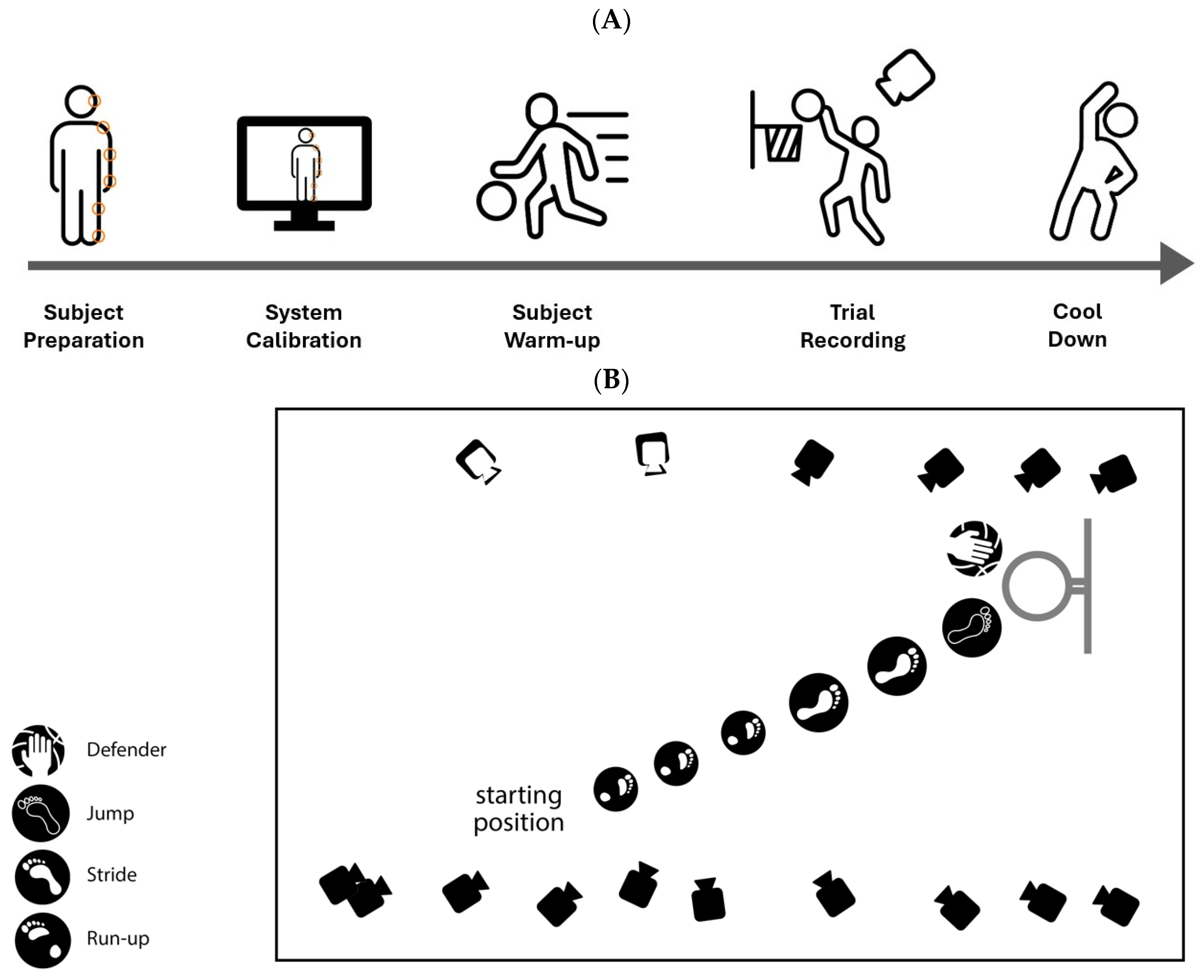
2.2. Testing Protocol
2.3. Data Processing and Analysis
2.4. Statistical Analysis
3. Results
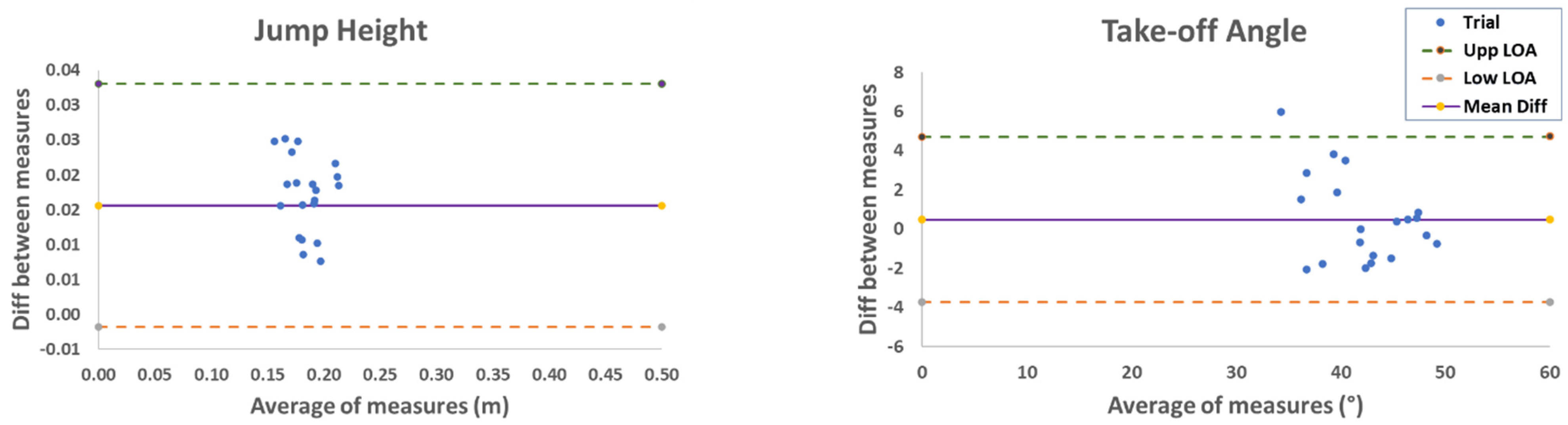
3.1. Discrete Measures
3.2. Continuous Measures
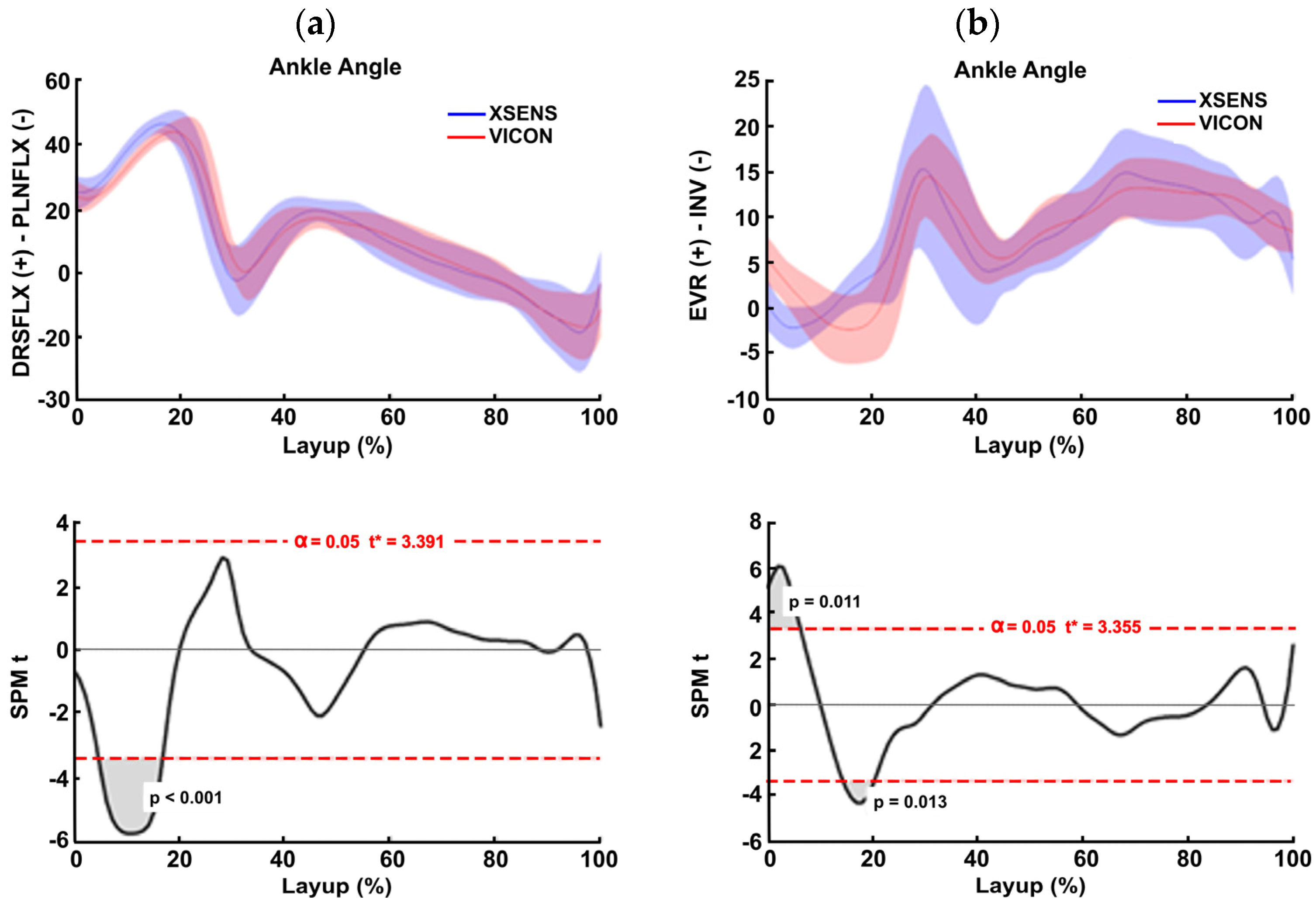
3.3. Statistical Parametric Mapping (SPM) Analysis
4. Discussion
4.1. Between-System Analysis
4.2. Between-Condition Analysis
5. Implications
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nijmeijer, E.M.; Heuvelmans, P.; Bolt, R.; Gokeler, A.; Otten, E.; Benjaminse, A. Concurrent validation of the Xsens IMU system of lower-body kinematics in jump-landing and change-of-direction tasks. J. Biomech. 2023, 154, 111637. [Google Scholar]
- Benjaminse, A.; Bolt, R.; Gokeler, A.; Otten, B. A validity study comparing Xsens with vicon. ISBS Proc. Arch. 2020, 38, 752. [Google Scholar]
- Poitras, I.; Dupuis, F.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.J.; Roy, J.S. Validity and reliability of wearable sensors for joint angle estimation: A systematic review. Sensors 2019, 19, 1555. [Google Scholar] [CrossRef] [PubMed]
- Godfrey, A.C.R.M.D.O.G.; Conway, R.; Meagher, D.; ÓLaighin, G. Direct measurement of human movement by accelerometry. Med. Eng. Phys. 2008, 30, 1364–1386. [Google Scholar]
- Ceseracciu, E.; Sawacha, Z.; Cobelli, C. Comparison of markerless and marker-based motion capture technologies through simultaneous data collection during gait: Proof of concept. PLoS ONE 2014, 9, e87640. [Google Scholar]
- Marin, F. Human and animal motion tracking using inertial sensors. Sensors 2020, 20, 6074. [Google Scholar] [CrossRef]
- Arlotti, J.S.; Carroll, W.O.; Afifi, Y.; Talegaonkar, P.; Albuquerque, L.; Ball, J.E.; Chander, H.; Petway, A. Benefits of IMU-based wearables in sports medicine: Narrative review. Int. J. Kinesiol. Sports Sci. 2022, 10, 36–43. [Google Scholar]
- Schepers, M.; Giuberti, M.; Bellusci, G. Xsens MVN: Consistent Tracking of Human Motion Using Inertial Sensing. Xsens Technol. 2018, 1, 1–8. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar]
- Benedetti, M.G.; Merlo, A.; Leardini, A. Inter-laboratory consistency of gait analysis measurements. Gait Posture 2013, 38, 934–939. [Google Scholar]
- Morrow, M.M.; Lowndes, B.; Fortune, E.; Kaufman, K.R.; Hallbeck, M.S. Validation of inertial measurement units for upper body kinematics. J. Appl. Biomech. 2017, 33, 227–232. [Google Scholar] [PubMed]
- McGrath, J.; Neville, J.; Stewart, T.; Cronin, J. Upper body activity classification using an inertial measurement unit in court and field-based sports: A systematic review. Proc. Inst. Mech. Eng. Part P J. Sports Eng. Technol. 2021, 235, 83–95. [Google Scholar]
- Eggert, B.; Mundt, M.; Markert, B. IMU-based activity recognition of the basketball jump shot. ISBS Proc. Arch. 2020, 38, 344. [Google Scholar]
- Chow, J.Y.; Davids, K.; Button, C.; Renshaw, I. Nonlinear Pedagogy in Skill Acquisition: An Introduction; Routledge: London, UK, 2021. [Google Scholar]
- Travassos, B.; Araújo, D.; Duarte, R.; McGarry, T. Spatiotemporal coordination behaviors in futsal (indoor football) are guided by informational game constraints. Hum. Mov. Sci. 2012, 31, 932–945. [Google Scholar] [CrossRef]
- Button, C.; Macleod, M.; Sanders, R.; Coleman, S. Examining movement variability in the basketball free-throw action at different skill levels. Res. Q. Exerc. Sport 2003, 74, 257–269. [Google Scholar]
- Esteves, P.T.; de Oliveira, R.F.; Araújo, D. Posture-related affordances guide attacks in basketball. Psychol. Sport Exerc. 2011, 12, 639–644. [Google Scholar] [CrossRef]
- Pinder, R.A.; Davids, K.; Renshaw, I.; Araújo, D. Representative learning design and functionality of research and practice in sport. J. Sport Exerc. Psychol. 2011, 33, 146–155. [Google Scholar] [CrossRef]
- Benjaminse, A.; Otten, B.; Gokeler, A.; Diercks, R.L.; Lemmink, K.A. Motor learning strategies in basketball players and its implications for ACL injury prevention: A randomized controlled trial. Knee Surg. Sports Traumatol. Arthrosc. 2017, 25, 2365–2376. [Google Scholar] [CrossRef]
- Lambrecht, S.; Harutyunyan, A.; Tanghe, K.; Afschrift, M.; De Schutter, J.; Jonkers, I. Real-time gait event detection based on kinematic data coupled to a biomechanical model. Sensors 2017, 17, 671. [Google Scholar] [CrossRef]
- De Leva, P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef]
- Di Paolo, S.; Lopomo, N.F.; Della Villa, F.; Paolini, G.; Figari, G.; Bragonzoni, L.; Grassi, A.; Zaffagnini, S. Rehabilitation and return to sport assessment after anterior cruciate ligament injury: Quantifying joint kinematics during complex high-speed tasks through wearable sensors. Sensors 2021, 21, 2331. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?—Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Validation of inertial measurement units with an optoelectronic system for whole-body motion analysis. Med. Biol. Eng. Comput. 2017, 55, 609–619. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63. [Google Scholar] [CrossRef]
- Shrout, P.E.; Fleiss, J.L. Intraclass correlations: Uses in assessing rater reliability. Psychol. Bull. 1979, 86, 420. [Google Scholar] [CrossRef]
- Bland, J.M. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 1, 307–310. [Google Scholar] [CrossRef]
- Pataky, T.C. Generalized n-dimensional biomechanical field analysis using statistical parametric mapping. J. Biomech. 2010, 43, 1976–1982. [Google Scholar] [CrossRef]
- Chia, L.; Andersen, J.T.; McKay, M.J.; Sullivan, J.; Megalaa, T.; Pappas, E. Evaluating the validity and reliability of inertial measurement units for determining knee and trunk kinematics during athletic landing and cutting movements. J. Electromyogr. Kinesiol. 2021, 60, 102589. [Google Scholar] [CrossRef]
- Fathian, R.; Khandan, A.; Chiu, L.Z.; Rouhani, H. Assessment of countermovement jump with and without arm swing using a single inertial measurement unit. Sports Biomech. 2024, 23, 2390–2407. [Google Scholar] [CrossRef]
- Villarejo-García, D.H.; Moreno-Villanueva, A.; Soler-López, A.; Reche-Soto, P.; Pino-Ortega, J. Use, validity and reliability of inertial movement units in volleyball: Systematic review of the scientific literature. Sensors 2023, 23, 3960. [Google Scholar] [CrossRef]
- Bouvier, B.; Duprey, S.; Claudon, L.; Dumas, R.; Savescu, A. Upper limb kinematics using inertial and magnetic sensors: Comparison of sensor-to-segment calibrations. Sensors 2015, 15, 18813–18833. [Google Scholar] [CrossRef] [PubMed]
- Leardini, A.; Chiari, L.; Della Croce, U.; Cappozzo, A. Human movement analysis using stereophotogrammetry. Part 3. Soft tissue artifact assessment and compensation. Gait Posture 2005, 21, 212–225. [Google Scholar] [PubMed]
- De Vries, W.H.K.; Veeger, H.E.J.; Cutti, A.G.; Baten, C.; Van Der Helm, F.C.T. Functionally interpretable local coordinate systems for the upper extremity using inertial & magnetic measurement systems. J. Biomech. 2010, 43, 1983–1988. [Google Scholar] [PubMed]
- Parel, I.; Cutti, A.; Fiumana, G.; Porcellini, G.; Verni, G.; Accardo, A. Ambulatory measurement of the scapulohumeral rhythm: Intra-and inter-operator agreement of a protocol based on inertial and magnetic sensors. Gait Posture 2012, 35, 636–640. [Google Scholar] [PubMed]
- Godwin, A.; Agnew, M.; Stevenson, J. Accuracy of inertial motion sensors in static, quasistatic, and complex dynamic motion. J. Biomech. Eng. 2009, 131, 114501. [Google Scholar]
- Fantozzi, S.; Giovanardi, A.; Magalhães, F.A.; Di Michele, R.; Cortesi, M.; Gatta, G. Assessment of three-dimensional joint kinematics of the upper limb during simulated swimming using wearable inertial-magnetic measurement units. J. Sports Sci. 2016, 34, 1073–1080. [Google Scholar]
- Ertzgaard, P.; Öhberg, F.; Gerdle, B.; Grip, H. A new way of assessing arm function in activity using kinematic Exposure Variation Analysis and portable inertial sensors–A validity study. Man. Ther. 2016, 21, 241–249. [Google Scholar]
- Cuesta-Vargas, A.I.; Galán-Mercant, A.; Williams, J.M. The use of inertial sensors system for human motion analysis. Phys. Ther. Rev. 2010, 15, 462–473. [Google Scholar]
- Šenk, M.; Cheze, L. Rotation sequence as an important factor in shoulder kinematics. Clin. Biomech. 2006, 21, S3–S8. [Google Scholar]
- Mok, K.M.; Kristianslund, E.K.; Krosshaug, T. The effect of thigh marker placement on knee valgus angles in vertical drop jumps and sidestep cutting. J. Appl. Biomech. 2015, 31, 269–274. [Google Scholar]
- Zhu, K.; Li, J.; Li, D.; Fan, B.; Shull, P.B. IMU shoulder angle estimation: Effects of sensor-to-segment misalignment and sensor orientation error. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 4481–4491. [Google Scholar] [PubMed]
- Dejnabadi, H.; Jolles, B.M.; Casanova, E.; Fua, P.; Aminian, K. Estimation and visualization of sagittal kinematics of lower limbs orientation using body-fixed sensors. IEEE Trans. Biomed. Eng. 2006, 53, 1385–1393. [Google Scholar] [PubMed]
- Cloete, T.; Scheffer, C. Benchmarking of a full-body inertial motion capture system for clinical gait analysis. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 4579–4582. [Google Scholar]
- Buganè, F.; Benedetti, M.G.; D’Angeli, V.; Leardini, A. Estimation of pelvis kinematics in level walking based on a single inertial sensor positioned close to the sacrum: Validation on healthy subjects with stereophotogrammetric system. Biomed. Eng. Online 2014, 13, 1–15. [Google Scholar]
- Lebel, K.; Boissy, P.; Nguyen, H.; Duval, C. Inertial measurement systems for segments and joints kinematics assessment: Towards an understanding of the variations in sensors accuracy. Biomed. Eng. Online 2017, 16, 1–16. [Google Scholar]
- Al-Amri, M.; Nicholas, K.; Button, K.; Sparkes, V.; Sheeran, L.; Davies, J.L. Inertial measurement units for clinical movement analysis: Reliability and concurrent validity. Sensors 2018, 18, 719. [Google Scholar] [CrossRef]
- Heuvelmans, P.; Benjaminse, A.; Bolt, R.; Baumeister, J.; Otten, E.; Gokeler, A. Concurrent validation of the Noraxon MyoMotion wearable inertial sensors in change-of-direction and jump-landing tasks. Sports Biomech. 2022, 1–16. [Google Scholar] [CrossRef]
- Teufl, W.; Miezal, M.; Taetz, B.; Fröhlich, M.; Bleser, G. Validity of inertial sensor based 3D joint kinematics of static and dynamic sport and physiotherapy specific movements. PLoS ONE 2019, 14, e0213064. [Google Scholar]
- Choo, C.Z.Y.; Chow, J.Y.; Komar, J. Validation of the Perception Neuron system for full-body motion capture. PLoS ONE 2022, 17, e0262730. [Google Scholar]
- Brice, S.M.; Phillips, E.J.; Millett, E.L.; Hunter, A.; Philippa, B. Comparing inertial measurement units and marker-based biomechanical models during dynamic rotation of the torso. Eur. J. Sport Sci. 2020, 20, 767–775. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Between-System RMSD (°) | Between-Condition RMSD (°) | |||||
|---|---|---|---|---|---|---|
| Joint Angle | Right Limb | Left Limb | XSENS | VICON | Offset * | |
| Shoulder | Flexion-extension | 9.3 (0.79) | 9.3 (3.88) | 21.4 | 23.5 | 2.1 |
| Abduction-adduction | 11.2 (1.22) | 6.9 (1.13) | 11.2 | 10.9 | 0.3 | |
| External-internal | 12.8 (0.70) | 10.2 (2.81) | 17.8 | 22.7 | 4.9 | |
| Elbow | Flexion-extension | 7.1 (0.74) | 5.5 (4.71) | 17.6 | 17.3 | 0.3 |
| Supination-pronation | 9.9 (0.95) | 6.9 (1.60) | 17.2 | 20.7 | 3.5 | |
| Wrist | Flexion-extension | 4.9 (0.98) | 5.1 (3.56) | 17.5 | 17.2 | 0.3 |
| Ulnar-Radial Deviation | 5.4 (0.56) | 4.3 (1.23) | 8.3 | 7.6 | 0.7 | |
| Hip | Flexion-extension | 9.2 (0.81) | 9.4 (0.60) | 12.9 | 12.1 | 0.8 |
| Abduction-adduction | 7.6 (1.46) | 7.26 (0.54) | 6.8 | 5.9 | 0.8 | |
| External-internal | 7.7 (0.70) | 7.6 (0.77) | 9.2 | 7.5 | 1.6 | |
| Knee | Flexion-extension | 6.7 (0.74) | 7.3 (2.95) | 12.9 | 12.9 | 0.0 |
| Ankle | Flexion-extension | 5.6 (0.52) | 6.4 (1.37) | 9.4 | 8.9 | 0.5 |
| External-internal | 4.9 (0.48) | 6.7 (0.59) | 4.9 | 4.1 | 0.8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alkhalaf, N.; Pain, M.T.G.; Hiley, M.J. A Comparative Analysis of IMUs and Optical Systems in Layup Shot Biomechanics. Appl. Sci. 2025, 15, 3847. https://doi.org/10.3390/app15073847
Alkhalaf N, Pain MTG, Hiley MJ. A Comparative Analysis of IMUs and Optical Systems in Layup Shot Biomechanics. Applied Sciences. 2025; 15(7):3847. https://doi.org/10.3390/app15073847
Chicago/Turabian StyleAlkhalaf, Nuha, Matthew T. G. Pain, and Michael J. Hiley. 2025. "A Comparative Analysis of IMUs and Optical Systems in Layup Shot Biomechanics" Applied Sciences 15, no. 7: 3847. https://doi.org/10.3390/app15073847
APA StyleAlkhalaf, N., Pain, M. T. G., & Hiley, M. J. (2025). A Comparative Analysis of IMUs and Optical Systems in Layup Shot Biomechanics. Applied Sciences, 15(7), 3847. https://doi.org/10.3390/app15073847