
Research on Decision-Making Methods for Autonomous Navigation in Inland Tributary Waterways



Abstract
1. Introduction
1.1. Literature Review
1.2. Motivation and Contribution
- A methodology integrating RPRCIRCA compliance and good seamanship for collision risk identification in inland tributaries remains absent. The complexity and variability of inland navigation environments (e.g., channel dynamics, hydrographic conditions, and traffic patterns) render conventional indicator-based risk identification methods inadequate.
- Adaptive optimization frameworks for autonomous navigation decisions are underdeveloped. In dynamic inland river environments, incomplete or inaccurate information may lead to prediction errors in ship maneuvering processes and target vessel trajectories. Furthermore, existing methods lack mechanisms to adaptively adjust decision-making based on real-time error feedback.
- Current autonomous navigation decision-making methods insufficiently address the interplay between ship maneuvering dynamics and environmental constraints. Specifically, the nonlinear maneuvering characteristics of underactuated ships and time-varying traffic environments—critical factors influencing collision avoidance decisions—are not yet fully quantified.
2. Analysis of the Autonomous Navigation Process
2.1. Autonomous Route Tracking Without the Risk of Collision
2.1.1. Ship Motion Model
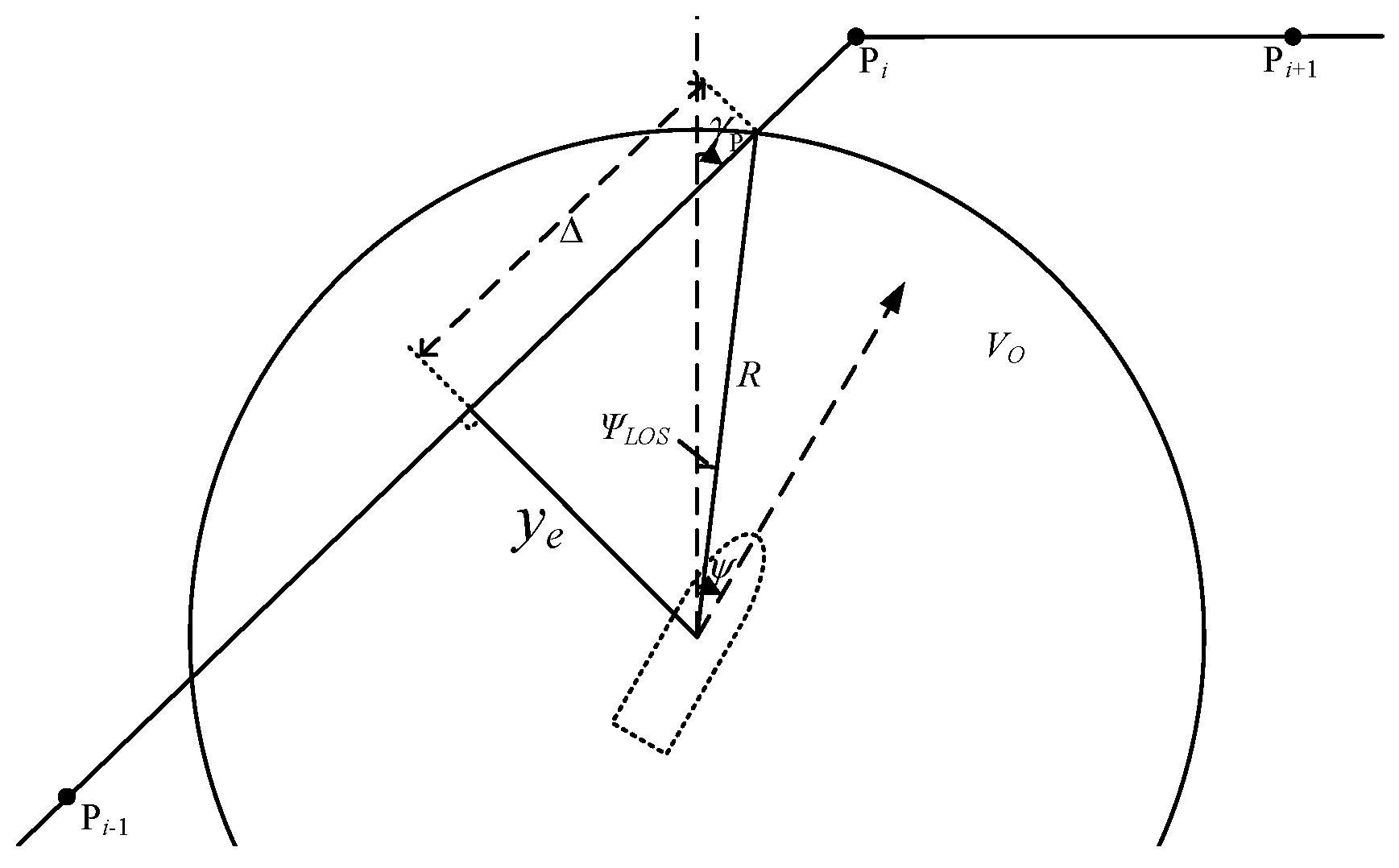
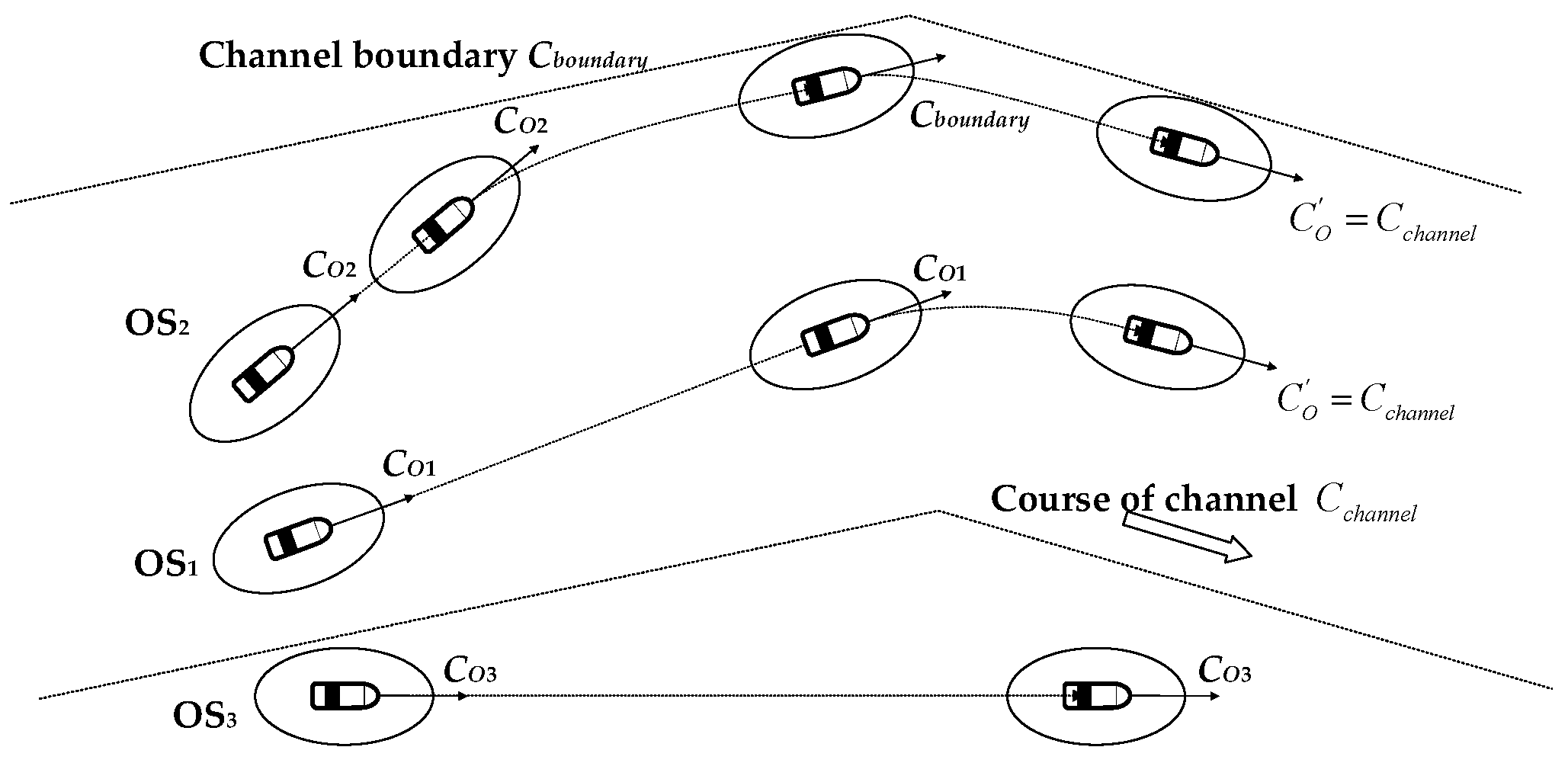
2.1.2. Route Tracking Model
2.2. Autonomous Collision Avoidance Under the Risk of Collision
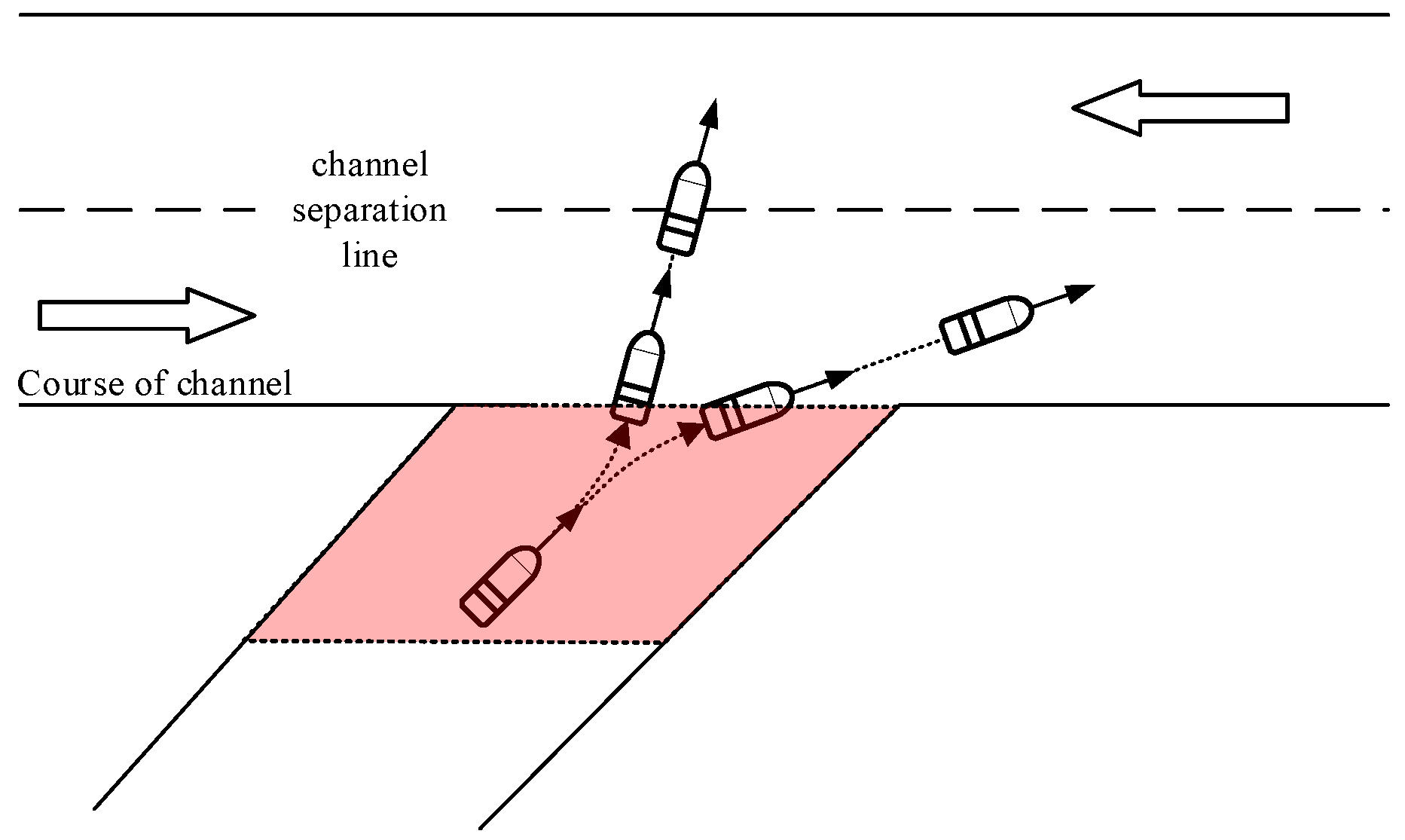
2.2.1. Navigation Rules for Inland Tributary Waterways
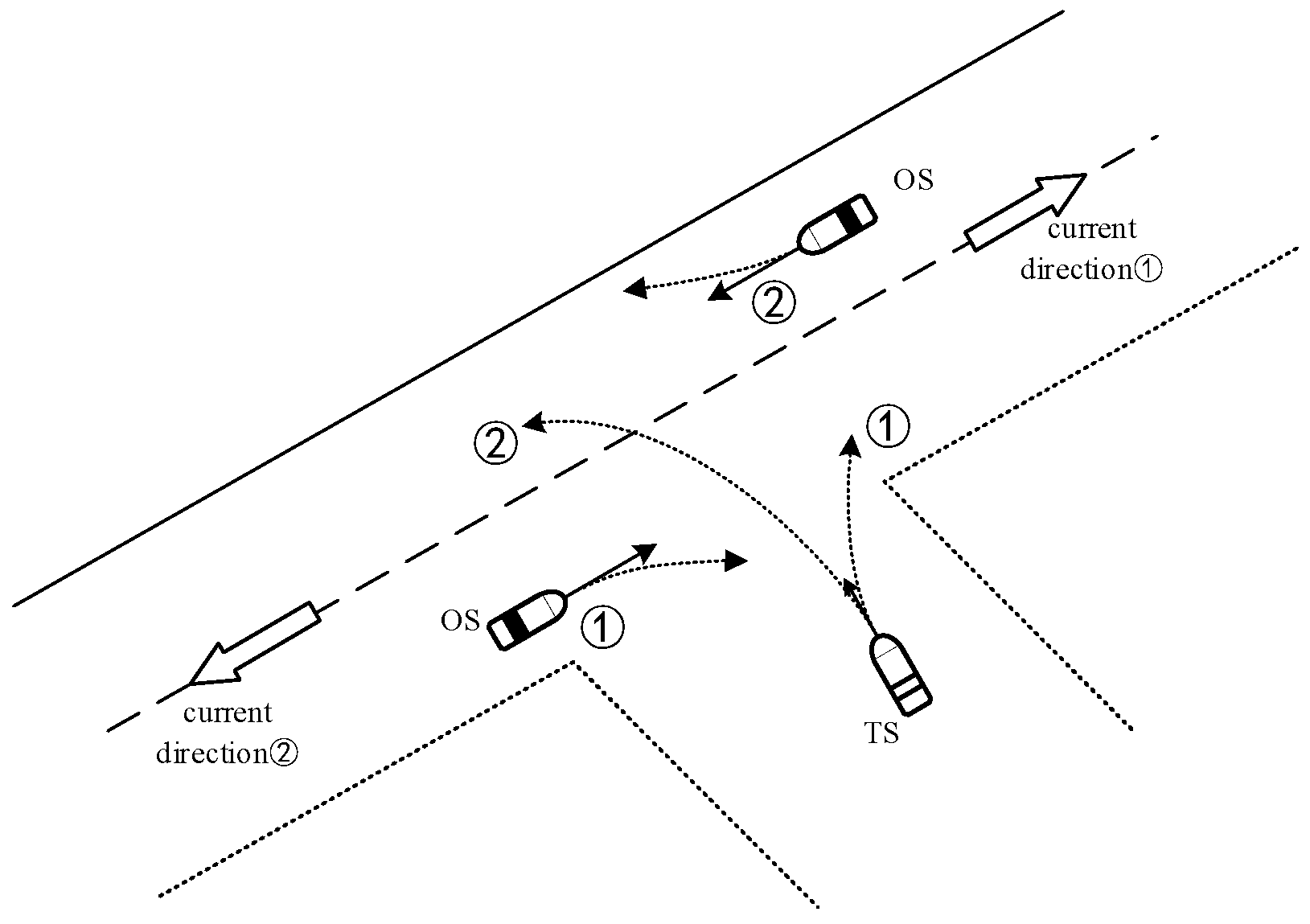
- Same-direction navigation: If a mainstream ship and a tributary ship are sailing in the same direction, the mainstream vessel shall give way to the tributary vessel.
- Opposite-direction navigation: If the mainstream ship and the tributary ship are sailing in opposite directions, the upstream vessel (regardless of mainstream/tributary status) shall give way to the downstream vessel.
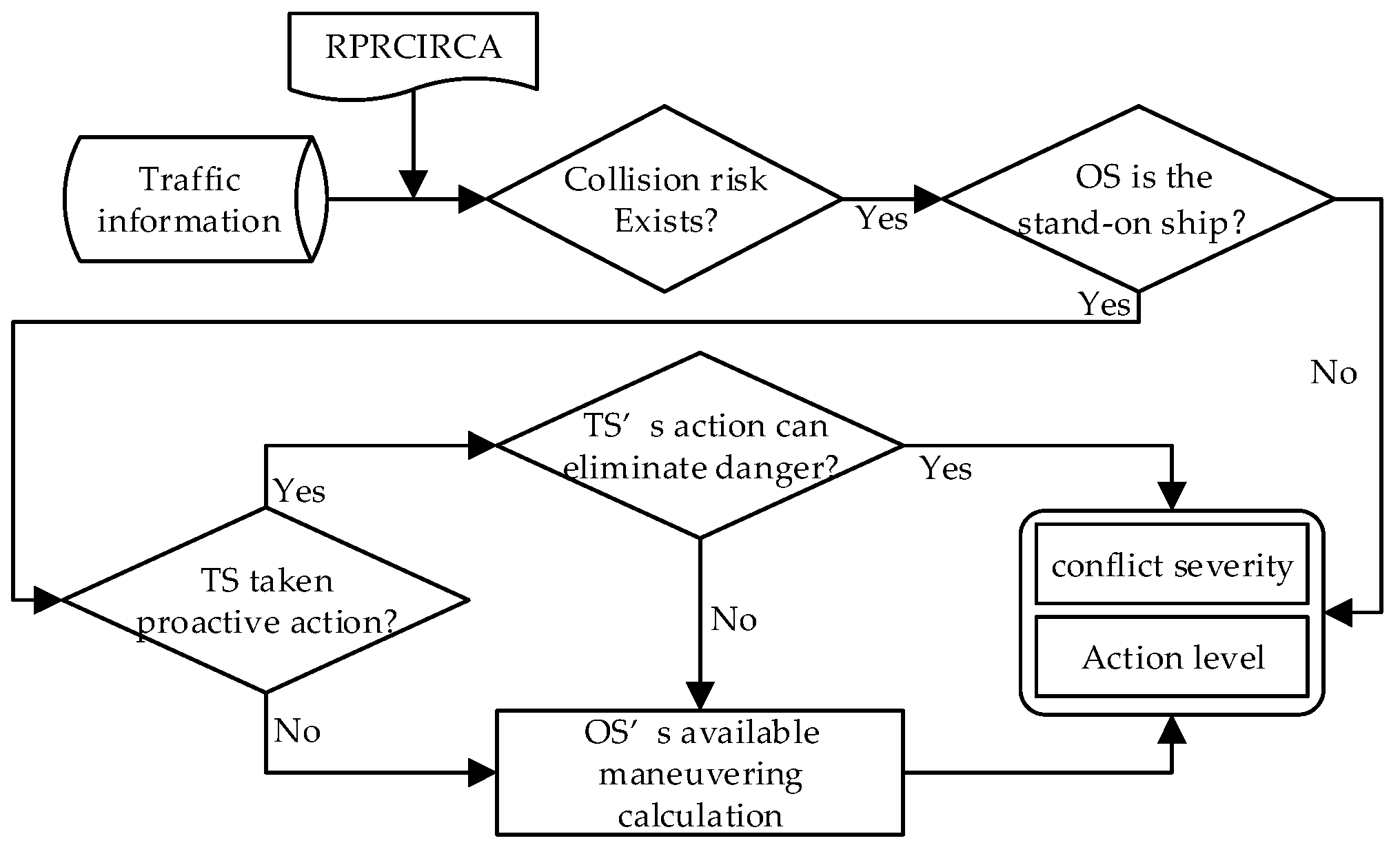
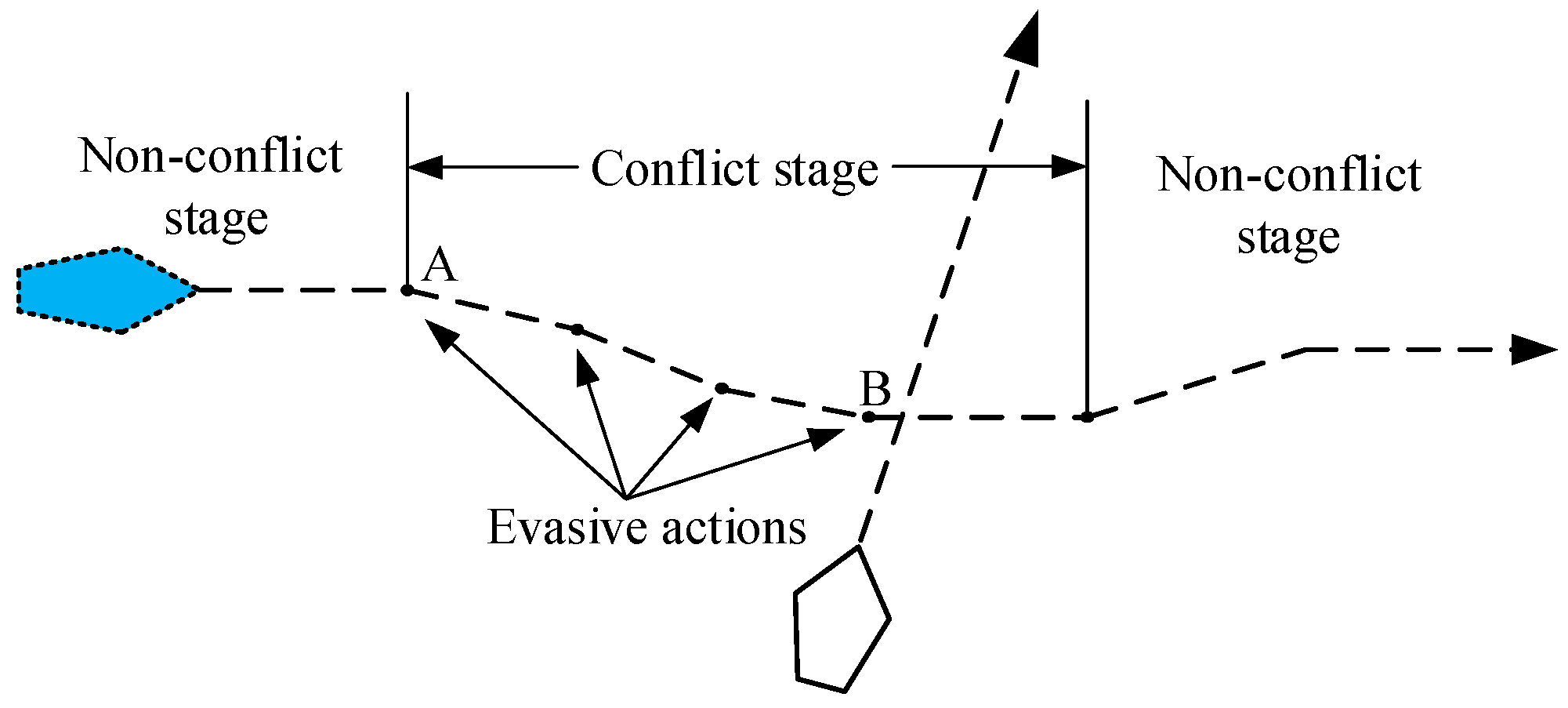
2.2.2. The Principle of Collision Avoidance Action
- As the give-way ship: The OS must execute appropriate evasive maneuvers.
- As the stand-on ship: The OS evaluates the timeliness and adequacy of the TS’s actions. If the TS’s maneuvers are sufficient and timely, the OS maintains course and speed. If the TS’s actions are inadequate, the OS implements corrective measures to ensure the TS passes safely outside the OS’s ship domain.
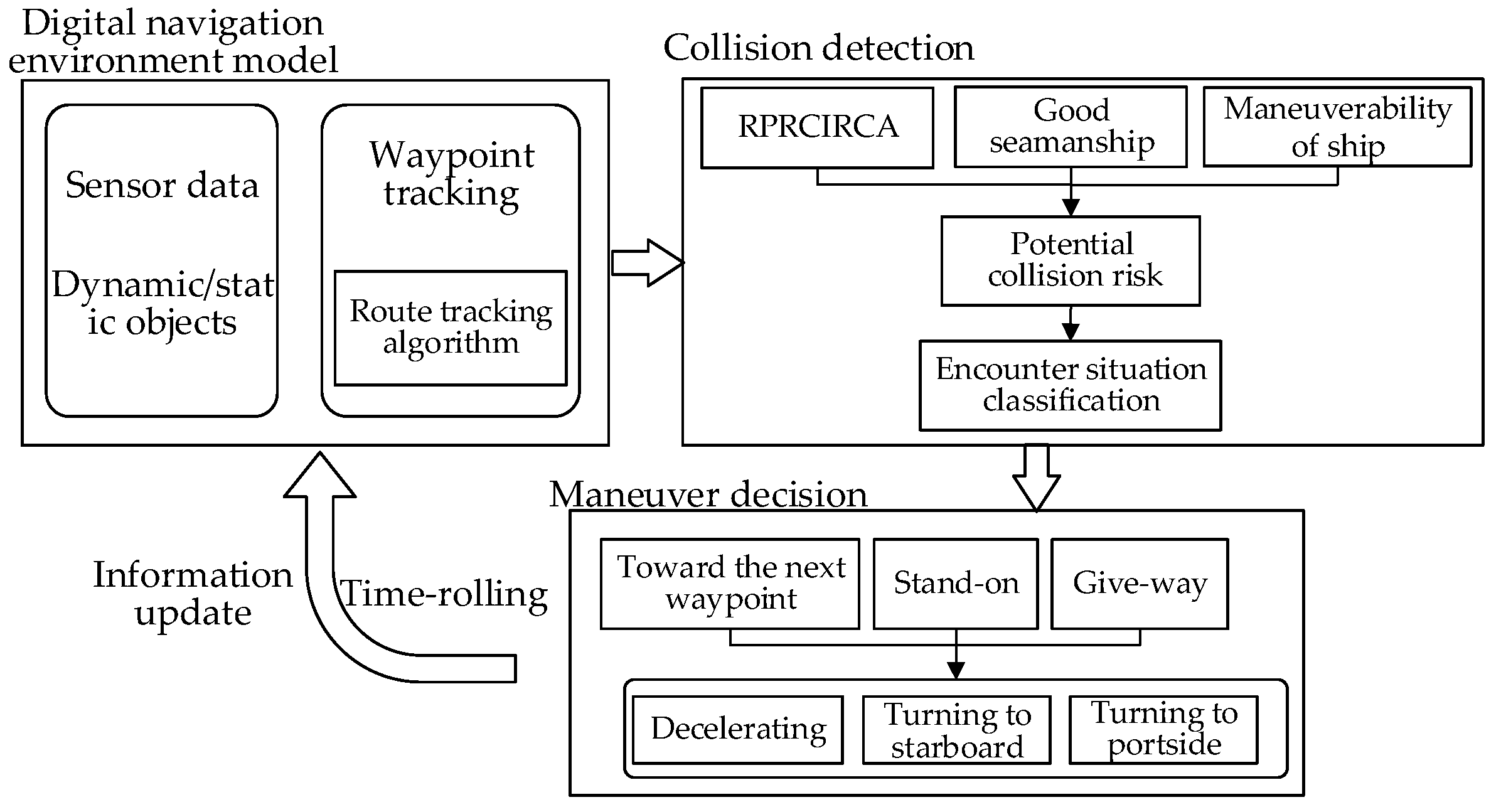
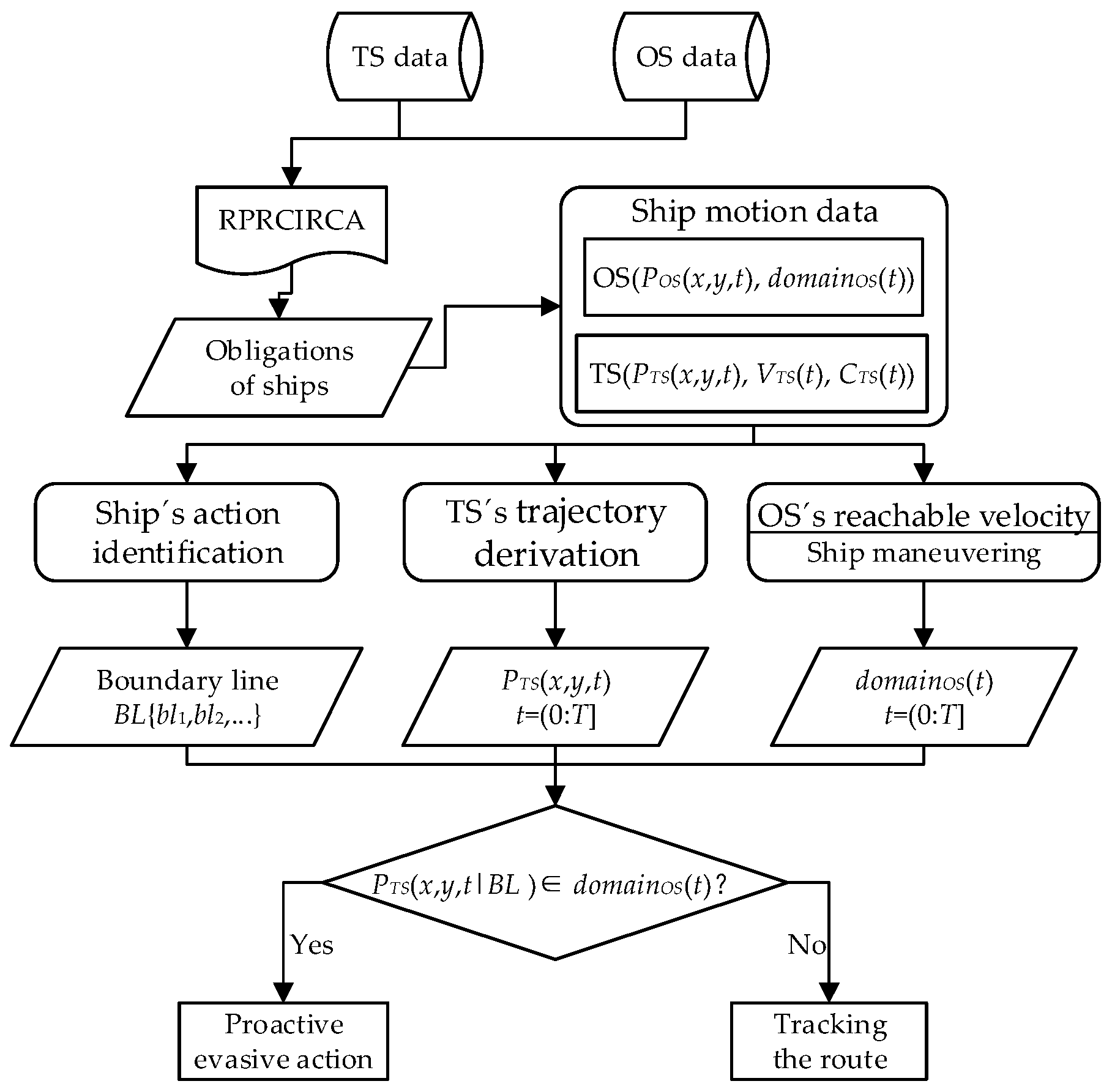
2.3. Autonomous Navigation Decision-Making Framework for Tributary Waterways
3. Methodology
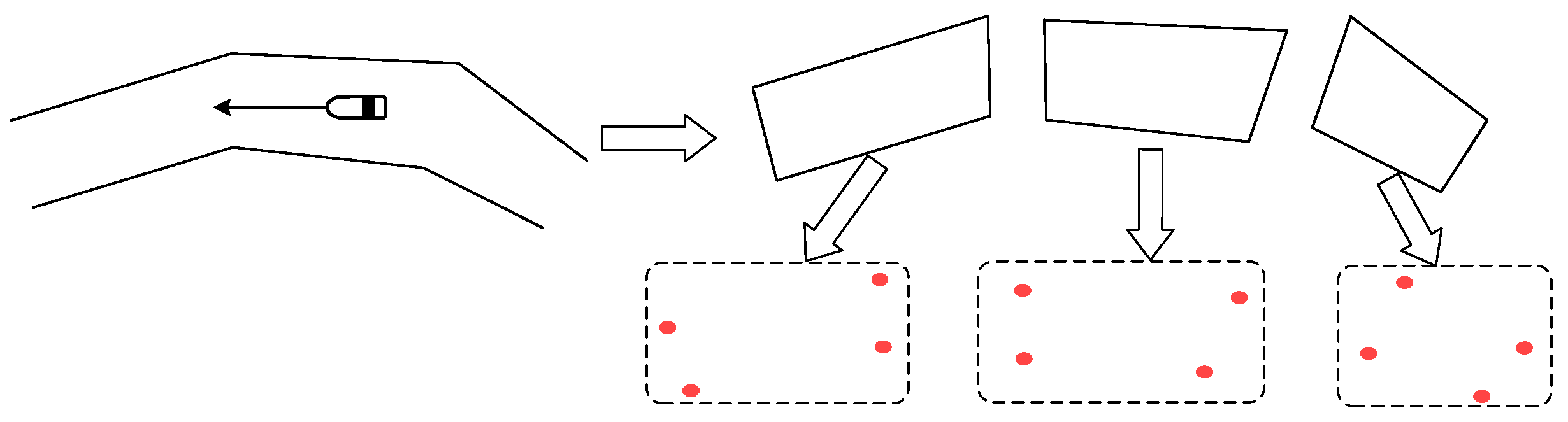
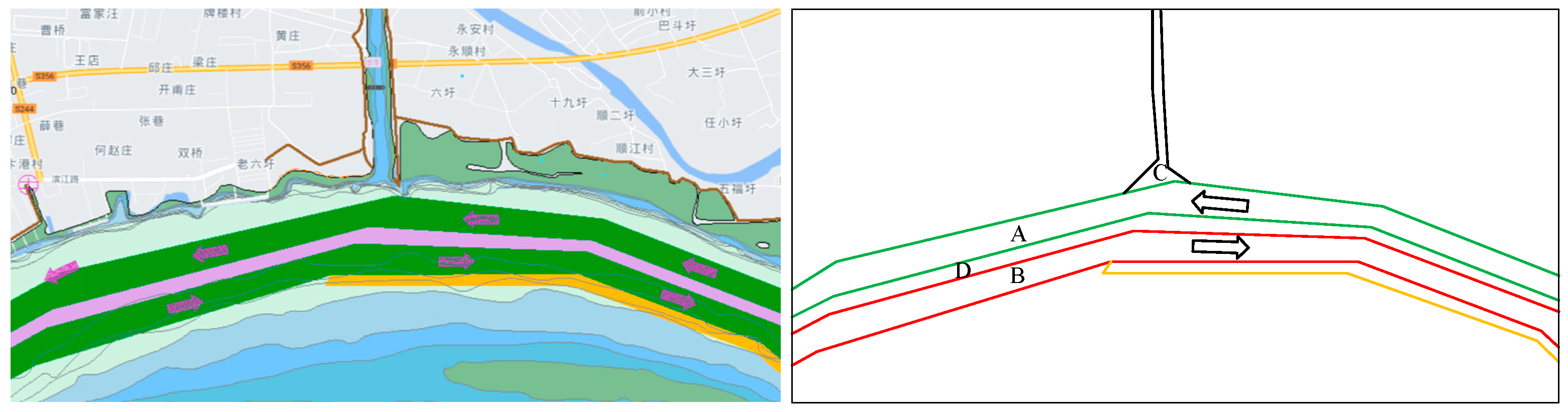
3.1. Digitalization of Transportation Environment
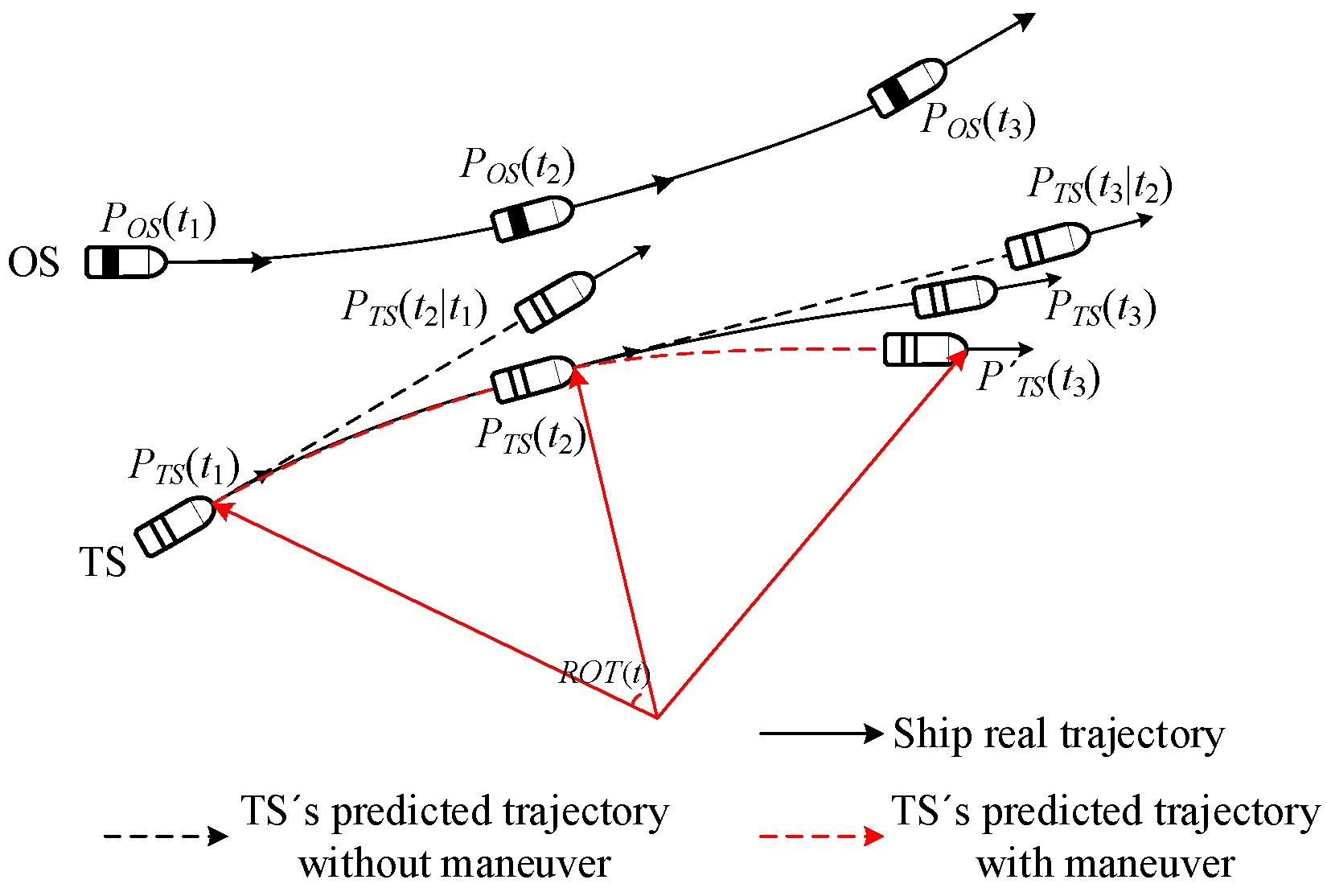
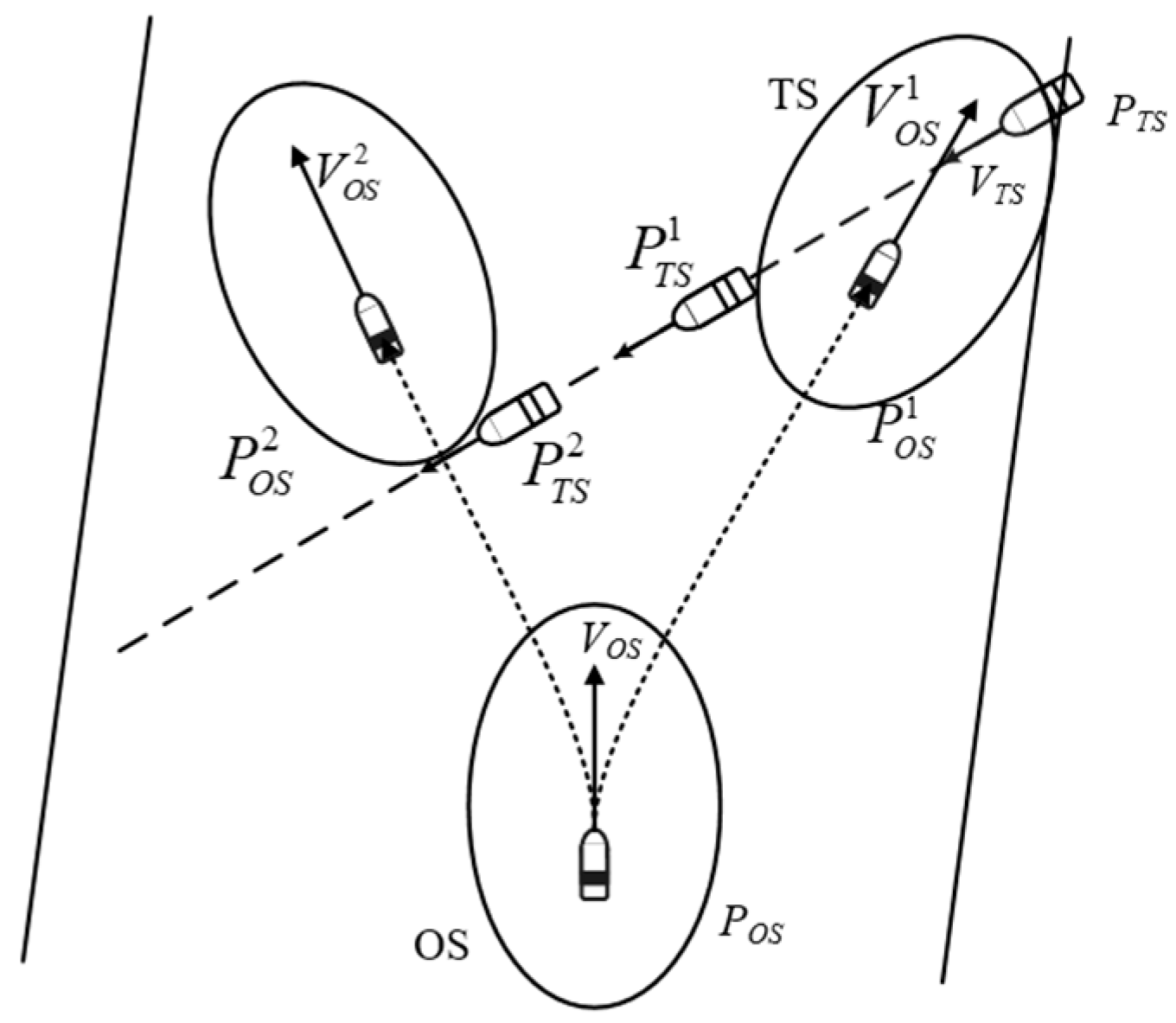
3.2. Collision Risk Model Based on Ship Trajectory Projection
3.3. Encounter Situation Identification Model
3.4. Collision Avoidance Decision-Making Model
4. Case Study
4.1. The Verification of the Route Tracking Model
4.2. The Verification of the Autonomous Navigation Decision-Making
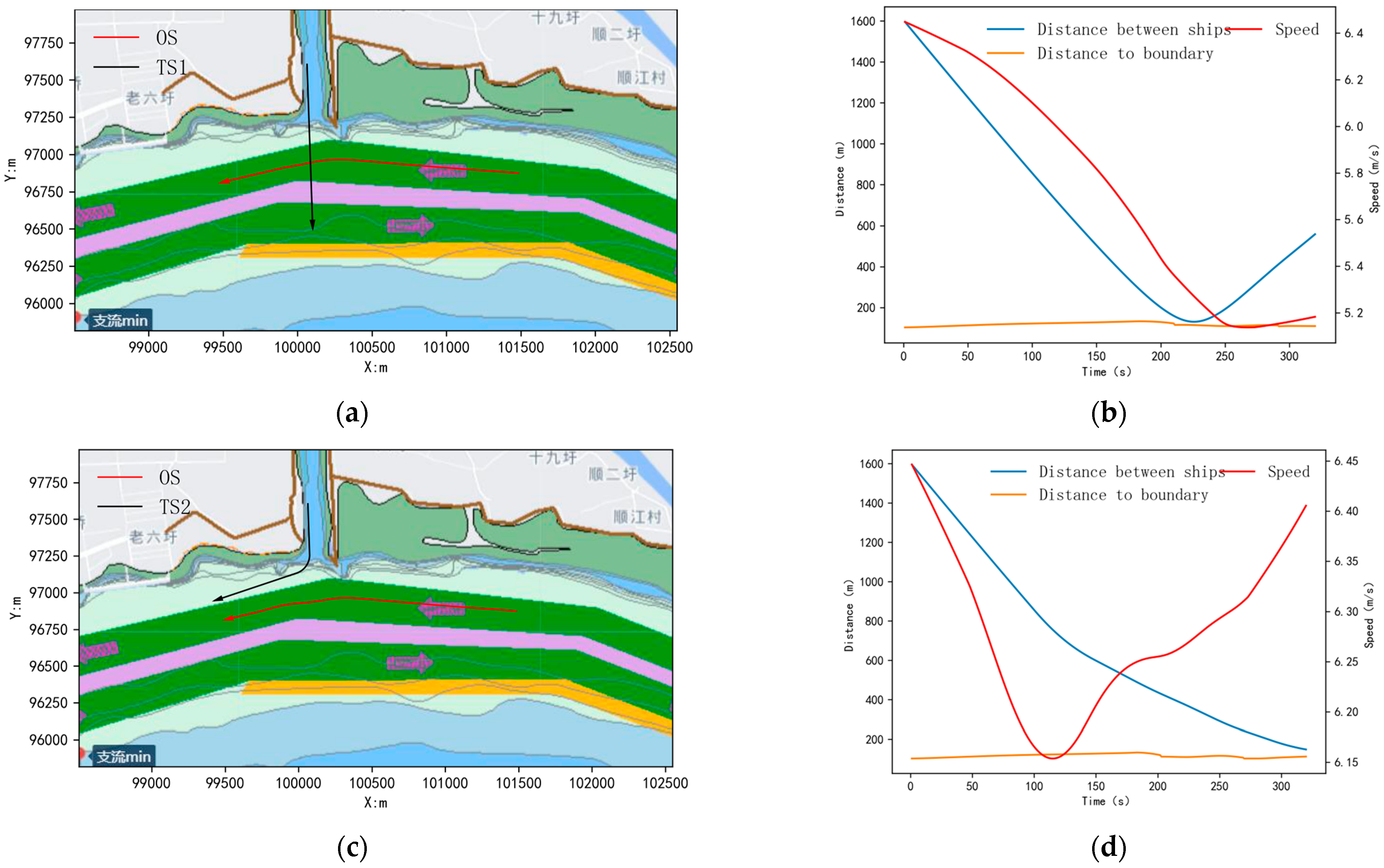
4.2.1. Single-Ship Encounter Scenario 1
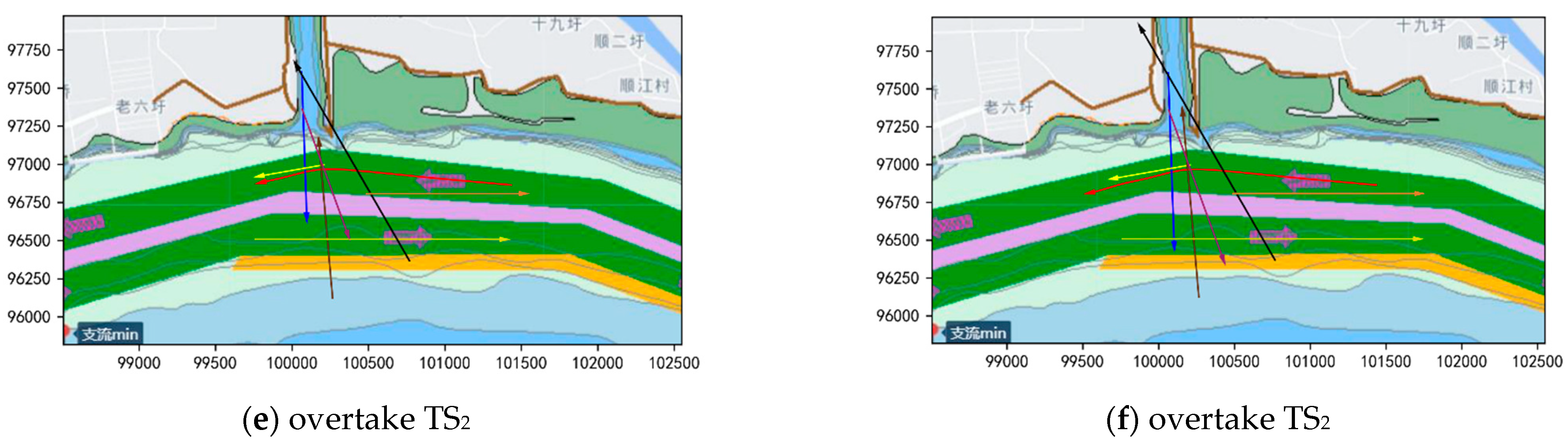
4.2.2. Multi-Ship Encounter Scenario 2
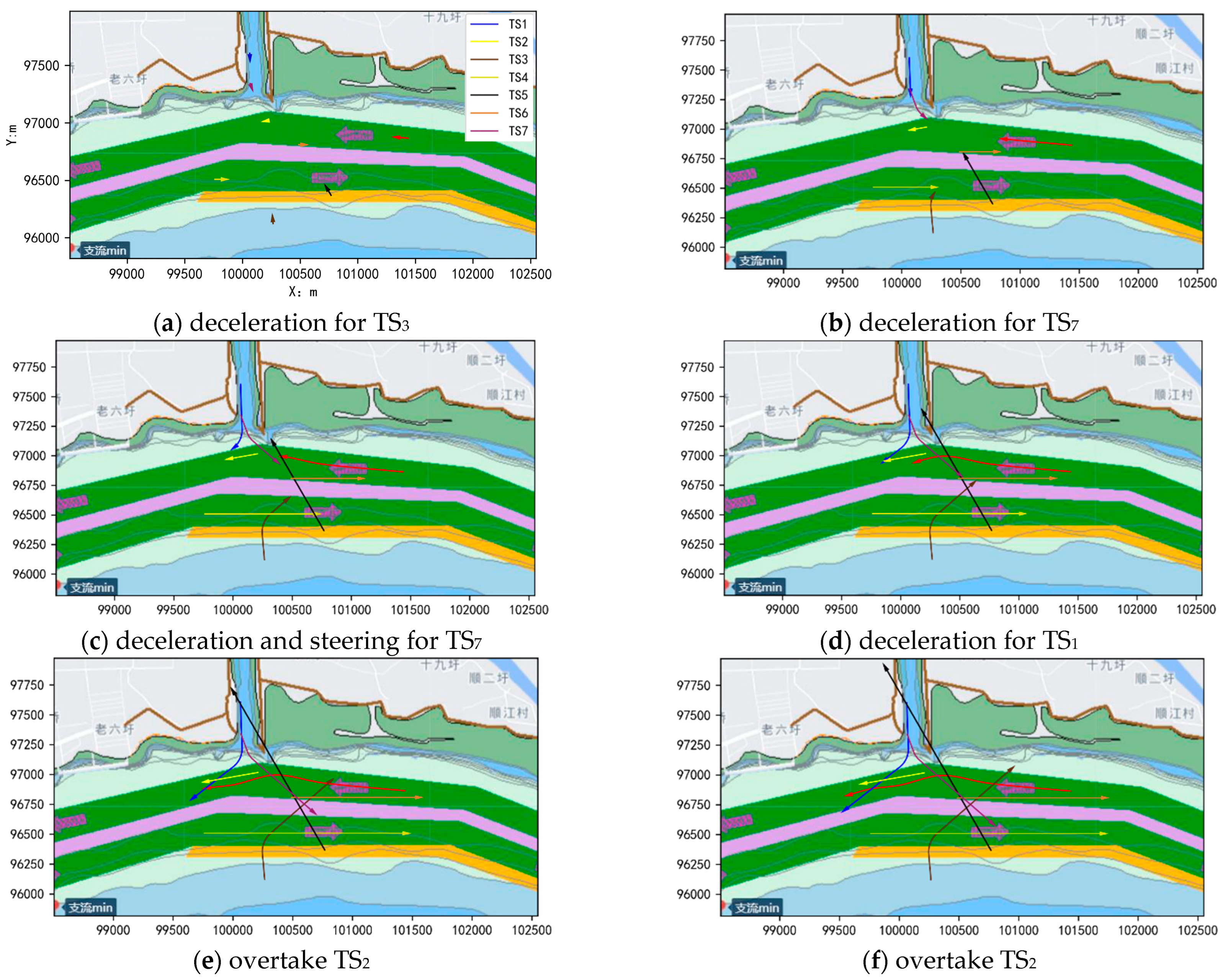
4.2.3. Multi-Ship Encounter Scenario 3
5. Discussion
5.1. Result and Discussion
5.2. Comparison Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RPRCIRCA | Rules of the People’s Republic of China for Inland River Collision Avoidance |
| CRI | Collision Risk Index |
| DCPA | Distance to the Closest Point of Approach |
| TCPA | Time to the Closest Point of Approach |
| MMG | Maneuvering Modeling Group |
| SVM | Support Vector Machine |
| VO | Velocity Obstacle |
| RVO | Reciprocal Velocity Obstacle |
| UAVs | unmanned aerial vehicles |
| MMG | mathematical model group |
| LOS | Line-of-Sight guidance algorithm |
| SOG | speed over ground |
| COG | course over ground |
| Nomenclature | |
| Symbols | Definition |
| m | the total mass of the vessel |
| mx | additional vertical mass |
| my | additional horizontal mass |
| u | lateral velocity |
| v | longitudinal velocity |
| r | yaw angular velocity |
| lateral acceleration | |
| longitudinal acceleration | |
| angular acceleration | |
| T | propeller thrust |
| the thrust deduction coefficient | |
| βR | the drift angle |
| B | beam |
| d | ship draft |
| L | ship length |
| xc | longitudinal coordinate of the center of flotation |
| kt | thrust correction factor |
| γA | hull wake correction factor |
| Cb | square coefficient |
| lcb | longitudinal center of buoyancy |
| lR | rudder drift angle coefficient |
| γp | the course of the recommended route |
| ye(t) | transverse distance error |
| Δ | the longitudinal tracking error |
| CTS | course of target ship |
| Cchannel | the direction of the channel |
| vTS | speed of target ship |
| θO | the angle between the course of the OS and the channel |
| θT | the angle between the course of the TS and the channel |
| Dp | propeller diameter |
References
- Chen, P.; Huang, Y.; Mou, J.; van Gelder, P.H.A.J.M. Ship Collision Candidate Detection Method: A Velocity Obstacle Approach. Ocean Eng. 2018, 170, 186–198. [Google Scholar]
- Eleftheria, E.; Apostolos, P.; Markos, V. Statistical Analysis of Ship Accidents and Review of Safety Level. Saf. Sci. 2016, 85, 282–292. [Google Scholar]
- Teixeira, P.; Yan, X.; Jiang, J. An Inland Waterway Traffic Complexity Evaluation Method Using Radar Sequential Images. Ocean. Eng. 2025, 315, 119842. [Google Scholar] [CrossRef]
- Chen, J.; Huang, L.; Zhang, K.; Hao, G.; Zhao, X.; He, Y. Research of Methods of Collision Warning and Avoidance Assistant Decision Making for the Ship in Typical Inland TSS Waters. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2024, 10, 04024023. [Google Scholar]
- Liu, C.; Chu, X.; Wu, W.; Li, S.; He, Z.; Zheng, M.; Zhou, H.; Li, Z. Human–Machine Cooperation Research for Navigation of Maritime Autonomous Surface Ships: A Review and Consideration. Ocean Eng. 2022, 246, 110555. [Google Scholar]
- He, Y.; Jin, Y.; Huang, L.; Xiong, Y.; Chen, P.; Mou, J. Quantitative Analysis of COLREG Rules and Seamanship for Autonomous Collision Avoidance at Open Sea. Ocean Eng. 2017, 140, 281–291. [Google Scholar] [CrossRef]
- Karahalios, H. The Contribution of Risk Management in Ship Management: The Case of Ship Collision. Saf. Sci. 2014, 63, 104–114. [Google Scholar] [CrossRef]
- Bukhari, A.C.; Tusseyeva, I.; Lee, B.G.; Kim, Y.G. An Intelligent Real-Time Multi-Vessel Collision Risk Assessment System from VTS View Point Based on Fuzzy Inference System. Expert Syst. Appl. 2013, 40, 1220–1230. [Google Scholar] [CrossRef]
- Park, G.K.; Kim, D.Y. Building an Intelligent Supporting System for Safe Navigation Using Fuzzy Theory. In Proceedings of the 2012 International Conference on Fuzzy Theory and Its Applications (iFUZZY2012), Taichung, Taiwan, 16–18 November 2012. [Google Scholar] [CrossRef]
- Chin, H.C.; Debnath, A.K. Modeling Perceived Collision Risk in Port Water Navigation. Saf. Sci. 2009, 47, 1410–1416. [Google Scholar] [CrossRef]
- Kearon, J. Computer Programs for Collision Avoidance and Traffic Keeping; Academic Press: London, UK, 1977; pp. 229–242. [Google Scholar]
- Yu, D.; He, Y.; Zhao, X.; Chen, J.; Liu, J.; Huang, L. Dynamic Adaptive Autonomous Navigation Decision-Making Method in Traffic Separation Scheme Waters: A Case Study for Chengshanjiao Waters. Ocean Eng. 2023, 285, 115448. [Google Scholar]
- Li, W.; Yang, J.; Gao, X.; Yu, J. Modelling and Simulation of Intelligent Collision Avoidance Based on Ship Domain. Int. J. Simul. Process Model. 2020, 15, 64–75. [Google Scholar] [CrossRef]
- Shaobo, W.; Yingjun, Z.; Lianbo, L. A Collision Avoidance Decision-Making System for Autonomous Ship Based on Modified Velocity Obstacle Method. Ocean Eng. 2020, 215, 107910. [Google Scholar]
- Fiskin, R.; Nasiboglu, E.; Yardimci, M.O. A Knowledge-Based Framework for Two-Dimensional (2D) Asymmetrical Polygonal Ship Domain. Ocean Eng. 2020, 202, 107187. [Google Scholar]
- Zheng, K.; Chen, Y.; Jiang, Y.; Qiao, S. A SVM Based Ship Collision Risk Assessment Algorithm. Ocean Eng. 2020, 202, 107062. [Google Scholar]
- Li, B. Navigation Risk Assessment Scheme Based on Fuzzy Dempster–Shafer Evidence Theory. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418799572. [Google Scholar]
- Nieh, C.Y.; Lee, M.C.; Huang, J.C.; Kuo, H.C. Risk Assessment and Traffic Behaviour Evaluation of Inbound Ships in Keelung Harbour Based on Ais Data. J. Mar. Sci. Technol. 2019, 27, 311–325. [Google Scholar]
- Fang, Z.; Yu, H.; Ke, R.; Shaw, S.L.; Peng, G. Automatic Identification System-Based Approach for Assessing the Near-Miss Collision Risk Dynamics of Ships in Ports. IEEE Trans. Intell. Transp. Syst. 2018, 20, 534–543. [Google Scholar] [CrossRef]
- Huang, Y.; van Gelder, P.H.A.J.M. Time-Varying Risk Measurement for Ship Collision Prevention. Risk Anal. 2020, 40, 24–42. [Google Scholar]
- Ma, Y.; Zhao, Y.; Incecik, A.; Yan, X.; Wang, Y.; Li, Z. A Collision Avoidance Approach via Negotiation Protocol for a Swarm of USVs. Ocean Eng. 2021, 224, 108713. [Google Scholar]
- Zheng, J.; Liu, B.; Li, Y.; Huang, C. Unmanned Ship Collision Avoidance Action Plan Deduction Method under Man–Machine Interactive Negotiation in Collision Avoidance Scenarios. J. Mar. Sci. Eng. 2024, 12, 1842. [Google Scholar] [CrossRef]
- Coenen, F.P.; Smeaton, G.P.; Bole, A.G. Knowledge-Based Collision Avoidance. J. Navig. 1989, 42, 107–116. [Google Scholar]
- Sun, M.; Zheng, Z. Uncertainty Analysis Method Based on Fuzzy Random Variables and Time Window Selection. IOP Conf. Ser. Mater. Sci. Eng. 2018, 382, 052015. [Google Scholar]
- Zhou, D.; Zheng, Z. Dynamic Fuzzy Ship Domain Considering the Factors of Own Ship and Other Ships. J. Navig. 2019, 72, 467–482. [Google Scholar]
- Ni, S.; Liu, Z.; Cai, Y.; Wang, X. Modelling of Ship’s Trajectory Planning in Collision Situations by Hybrid Genetic Algorithm. Pol. Marit. Res. 2018, 25, 14–25. [Google Scholar]
- Ma, J.; Jia, C.; Shu, Y.; Liu, K.; Zhang, Y.; Hu, Y. Intent Prediction of Vessels in Intersection Waterway Based on Learning Vessel Motion Patterns with Early Observations. Ocean Eng. 2021, 232, 109154. [Google Scholar]
- Szlapczynski, R.; Szlapczynska, J. A Method of Determining and Visualizing Safe Motion Parameters of a Ship Navigating in Restricted Waters. Ocean Eng. 2017, 129, 363–373. [Google Scholar]
- Candeloro, M.; Lekkas, A.M.; Sørensen, A.J. A Voronoi-Diagram-Based Dynamic Path-Planning System for Underactuated Marine Vessels. Control Eng. Pract. 2017, 61, 41–54. [Google Scholar]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. Collision Avoidance Using Finite Control Set Model Predictive Control for Unmanned Surface Vehicle. Appl. Sci. 2018, 8, 926. [Google Scholar] [CrossRef]
- Degre, T.; Lefevre, X. A Collision Avoidance System. J. Navig. 1981, 34, 294–302. [Google Scholar]
- Wilson, P.A.; Harris, C.J.; Hong, X. A Line of Sight Counteraction Navigation Algorithm for Ship Encounter Collision Avoidance. J. Navig. 2003, 56, 111–121. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Rob. Res. 1998, 17, 760–772. [Google Scholar]
- Kufoalor, D.K.M.; Brekke, E.F.; Johansen, T.A. Proactive Collision Avoidance for ASVs Using A Dynamic Reciprocal Velocity Obstacles Method. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2402–2409. [Google Scholar]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P. Global Path Planning for Autonomous Ship: A Hybrid Approach of Fast Marching Square and Velocity Obstacles Methods. Ocean Eng. 2020, 214, 107793. [Google Scholar]
- Huang, Y.; van Gelder, P.H.A.J.M.; Wen, Y. Velocity Obstacle Algorithms for Collision Prevention at Sea. Ocean Eng. 2018, 151, 308–321. [Google Scholar]
- Praczyk, T. Neural Collision Avoidance System for Biomimetic Autonomous Underwater Vehicle. Soft Comput. 2020, 24, 1315–1333. [Google Scholar]
- Cheng, X.; Li, G.; Skulstad, R.; Chen, S.; Hildre, H.P.; Zhang, H. A Neural-Network-Based Sensitivity Analysis Approach for Data-Driven Modeling of Ship Motion. IEEE J. Ocean. Eng. 2019, 45, 451–461. [Google Scholar]
- Zeng, X.M.; Ito, M. Planning a Collision Avoidance Model for Ship Using Genetic Algorithm. In Proceedings of the 2001 IEEE International Conference on Systems, Man and Cybernetics. e-Systems and e-Man for Cybernetics in Cyberspace (Cat.No.01CH37236), Tucson, AZ, USA, 7–10 October 2001; Volume 4, pp. 2355–2360. [Google Scholar]
- Tsou, M.C. Multi-Target Collision Avoidance Route Planning under an ECDIS Framework. Ocean Eng. 2016, 121, 268–278. [Google Scholar]
- Xie, S.; Chu, X.; Zheng, M.; Liu, C. Ship Predictive Collision Avoidance Method Based on an Improved Beetle Antennae Search Algorithm. Ocean Eng. 2019, 192, 106542. [Google Scholar] [CrossRef]
- Ni, S.; Liu, Z.; Cai, Y.; Gao, S. Coordinated Anti-Collision Path Planning Algorithm for Marine Surface Vessels. IEEE Access 2020, 8, 160825–160839. [Google Scholar] [CrossRef]
- Ni, S.; Liu, Z.; Cai, Y. Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations. J. Mar. Sci. Eng. 2019, 7, 90. [Google Scholar] [CrossRef]
- Zhao, X.; He, Y.; Huang, L.; Mou, J.; Zhang, K.; Liu, X. Intelligent Collision Avoidance Method for Ships Based on COLRGEs and Improved Velocity Obstacle Algorithm. Appl. Sci. 2022, 12, 8926. [Google Scholar] [CrossRef]
- He, Y.; Liu, X.; Zhang, K.; Mou, J.; Liang, Y.; Zhao, X.; Wang, B.; Huang, L. Dynamic Adaptive Intelligent Navigation Decision Making Method for Multi-Object Situation in Open Water. Ocean Eng. 2022, 253, 111238. [Google Scholar] [CrossRef]
- Zhang, K.; Huang, L.; Liu, X.; Chen, J.; Zhao, X.; Huang, W.; He, Y. A Novel Decision Support Methodology for Autonomous Collision Avoidance Based on Deduction of Manoeuvring Process. J. Mar. Sci. Eng. 2022, 10, 765. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meeting Situation | Navigation Situation | |
|---|---|---|
| Risk of collision exists | Head-on situation | θO ≤ 5° and θT ≤ 5° |
| Overtaking situation | θO ≤ 5° and θT ≤ 5° | |
| Retrograde ship | θO ≤ 5° and θT > 175° | |
| Transiting ship | θO ≤ 5° and 5° < θT ≤ 175° or TS is outside the channel | |
| Crossing situation | θO ≥ 5° |
| Flow Direction | OS | TS | Encounter Situation |
|---|---|---|---|
| ② | ① | ① | OS gives way to TS |
| ② | ② | OS gives way to TS | |
| ① | ② | OS gives way to TS | |
| ① | ① | ① | OS gives way to TS |
| ② | ② | OS gives way to TS | |
| ① | ② | TS gives way to OS |
| Ship List | Position | Velocity (kn) | Course (°) | Turning Rate (°/s) | Turning Angle (°) |
|---|---|---|---|---|---|
| OS | 119°28.812′ E, 32°16.308′ N | 12.5 | 275 | / | / |
| TS1 | 119°27.906′ E, 32°16.704′ N | 7 | 178 | 0 | 0 |
| TS2 | 119°27.906′ E, 32°16.704′ N | 7 | 178 | 1 | 75 |
| Ship List | Position | Velocity (kn) | Course (°) | Turning Rate (°/s) |
|---|---|---|---|---|
| OS | 119°28.782′ E, 32°16.302′ N | 12.5 | 275 | 0 |
| TS1 | 119°27.906′ E, 32°16.704′ N | 6.5 | 180 | 0 |
| TS2 | 119°27.996′ E, 32°16.374′ N | 3 | 260 | 0 |
| TS3 | 119°28.026′ E, 32°15.9′ N | 7 | 355 | 0 |
| TS4 | 119°27.702′ E, 32°16.11′ N | 11 | 090 | 0 |
| TS5 | 119°28.35′ E, 32°16.0.32′ N | 10 | 330 | 0 |
| TS6 | 119°28.17′ E, 32°16.272′ N | 7 | 090 | 0 |
| TS7 | 119°27.906′ E, 32°16.572′ N | 6 | 160 | 0 |
| Ship List | Position | Velocity (kn) | Course (°) | Turning Rate (°/s) | Turning Angle (°) |
|---|---|---|---|---|---|
| OS | 119°28.782′ E, 32°16.302′ N | 12.5 | 275 | — | — |
| TS1 | 119°27.906′ E, 32°16.704′ N | 6.5 | 180 | 1 | 55 |
| TS2 | 119°27.996′ E, 32°16.374′ N | 3 | 260 | 0 | 0 |
| TS3 | 119°28.026′ E, 32°15.9′ N | 7 | 355 | 1 | 55 |
| TS4 | 119°27.702′ E, 32°16.11′ N | 11 | 090 | 0 | 0 |
| TS5 | 119°28.35′ E, 32°16.0.32′ N | 10 | 330 | 0 | 0 |
| TS6 | 119°28.17′ E, 32°16.272′ N | 7 | 090 | 0 | 0 |
| TS7 | 119°27.906′ E, 32°16.572′ N | 6 | 160 | −1 | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Chen, J.; Xu, L.; Li, H.; Hao, G.; He, Y. Research on Decision-Making Methods for Autonomous Navigation in Inland Tributary Waterways. Appl. Sci. 2025, 15, 3823. https://doi.org/10.3390/app15073823
Huang L, Chen J, Xu L, Li H, Hao G, He Y. Research on Decision-Making Methods for Autonomous Navigation in Inland Tributary Waterways. Applied Sciences. 2025; 15(7):3823. https://doi.org/10.3390/app15073823
Chicago/Turabian StyleHuang, Liwen, Jiahao Chen, Luping Xu, Haoyu Li, Guozhu Hao, and Yixiong He. 2025. "Research on Decision-Making Methods for Autonomous Navigation in Inland Tributary Waterways" Applied Sciences 15, no. 7: 3823. https://doi.org/10.3390/app15073823
APA StyleHuang, L., Chen, J., Xu, L., Li, H., Hao, G., & He, Y. (2025). Research on Decision-Making Methods for Autonomous Navigation in Inland Tributary Waterways. Applied Sciences, 15(7), 3823. https://doi.org/10.3390/app15073823