
Real-Time State Evaluation System of Antenna Structures in Radio Telescopes Based on a Digital Twin

 , ,
, , 
Abstract
1. Introduction
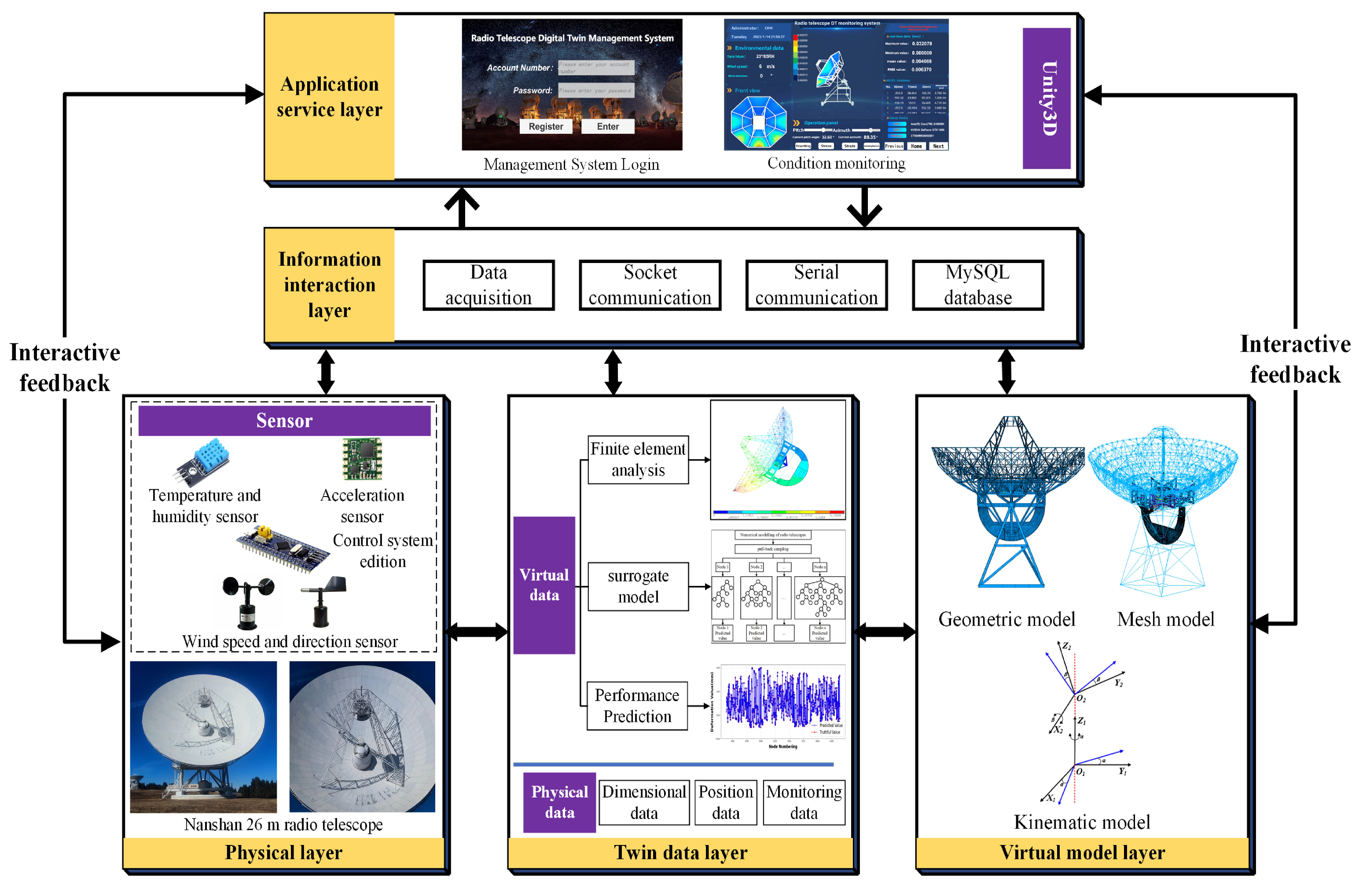
2. DTs Framework of the Radio Telescope
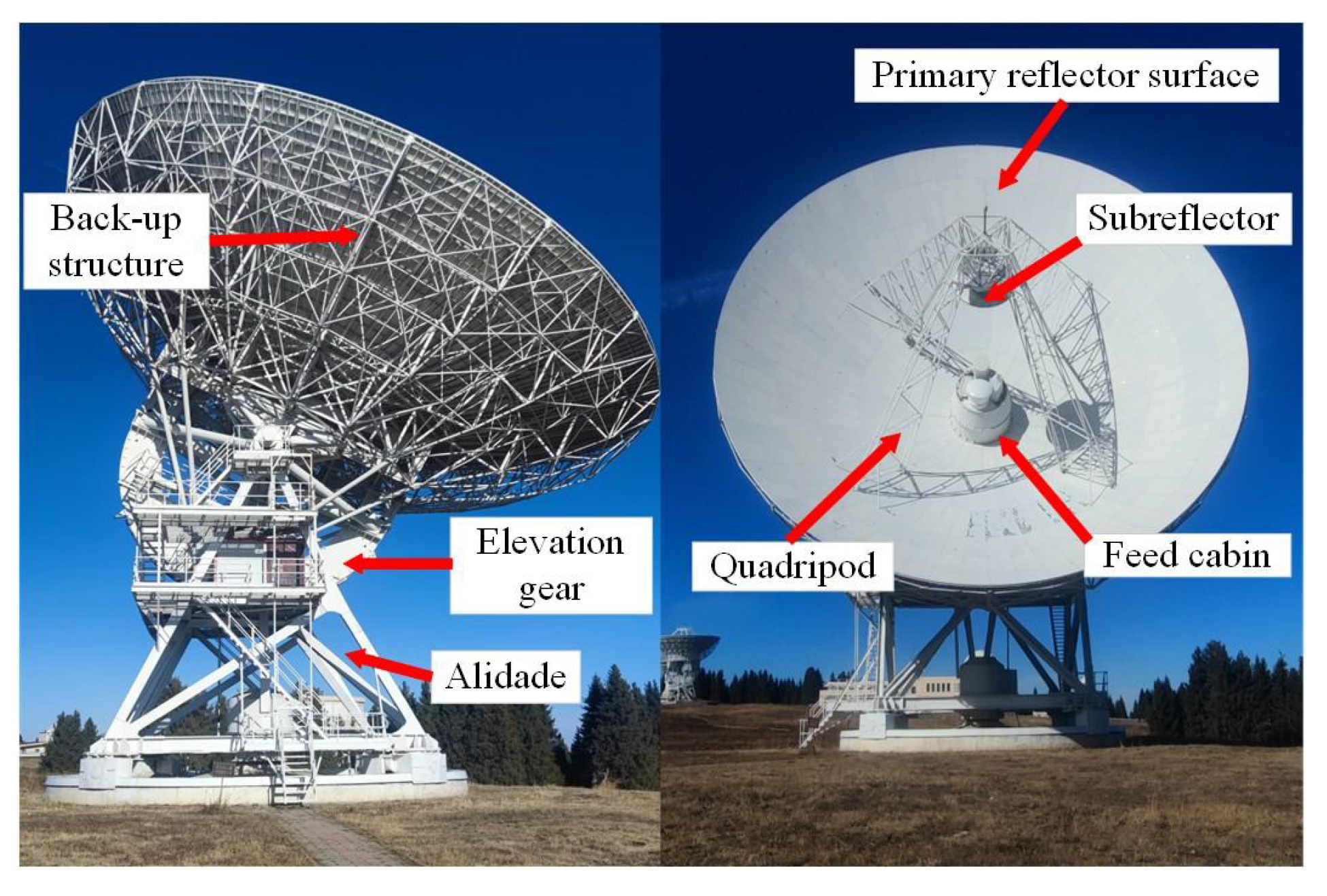
- Physical entity layerThe physical entity layer is the foundation of the DTs, which mainly includes the radio telescope entity, sensor, and control system. The entity is mainly composed of the primary reflector, the subreflector, the backup structure, the panel, the elevation gear, the center body, the alidade, and so on. The sensor includes an acceleration sensor, wind speed and direction sensor, temperature and humidity sensor, etc. The control system includes servo motors and control algorithms that drive the elevation and azimuth motion of the antenna.
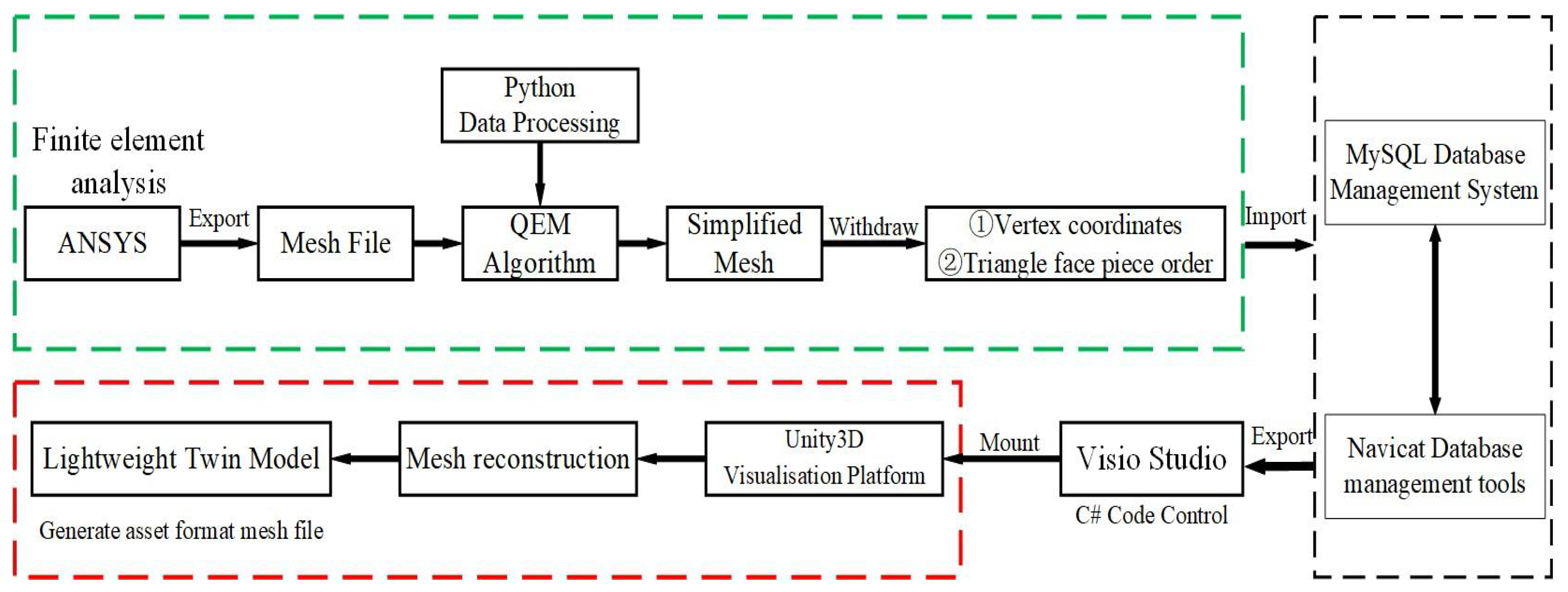
- Twin model layerThe twin model layer is the mapping of physical entities in the virtual space, which mainly includes the geometric model, kinematics model, and mechanism model of the radio telescope. The geometric model is obtained by modeling the real size of the entity in equal proportion, and the lightweight twin model is constructed by mesh simplification technology and mesh reconstruction algorithm. The kinematics model reflects the position, attitude, trajectory, and other motion state information of the radio telescope during operation, as well as the internal constraints of the system. The mechanism model contains the mechanical behavior and state information of the radio telescope in the coupled physical field.
- Twin data layerThe data layer is the key to ensuring the stable operation of the entire DT, including physical data and virtual data. Physical data comprise to the static attribute data and dynamic pose data of the radio telescope, sensor monitoring data, environmental data, etc. Virtual data comprise finite element simulation data, surrogate model prediction data, etc.
- Information interaction layerThe information interaction layer aims to realize efficient and accurate data interaction between physical entities and twin models. It mainly includes a communication module and database management module, which can realize the functions of data collection, processing, analysis, and storage in the system.
- Application service layerThe application service layer is the integration of various functions of the DTs. Based on the Unity3D visualization engine, this layer can realize core functions such as monitoring, evaluation, and human-computer interaction of the motion state and structural state in the DTs of the radio telescope.
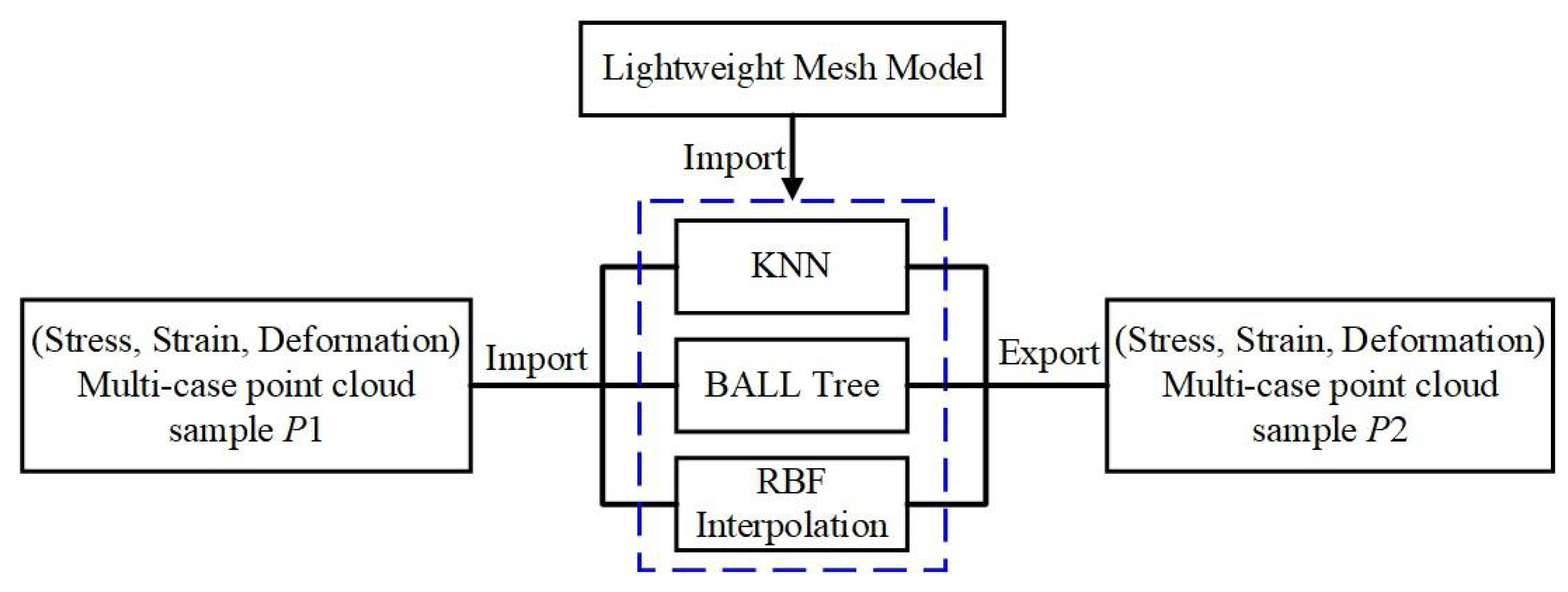
3. Construction of a Lightweight Twin Model
4. Real-Time Simulation Construction of Antenna Physical Field
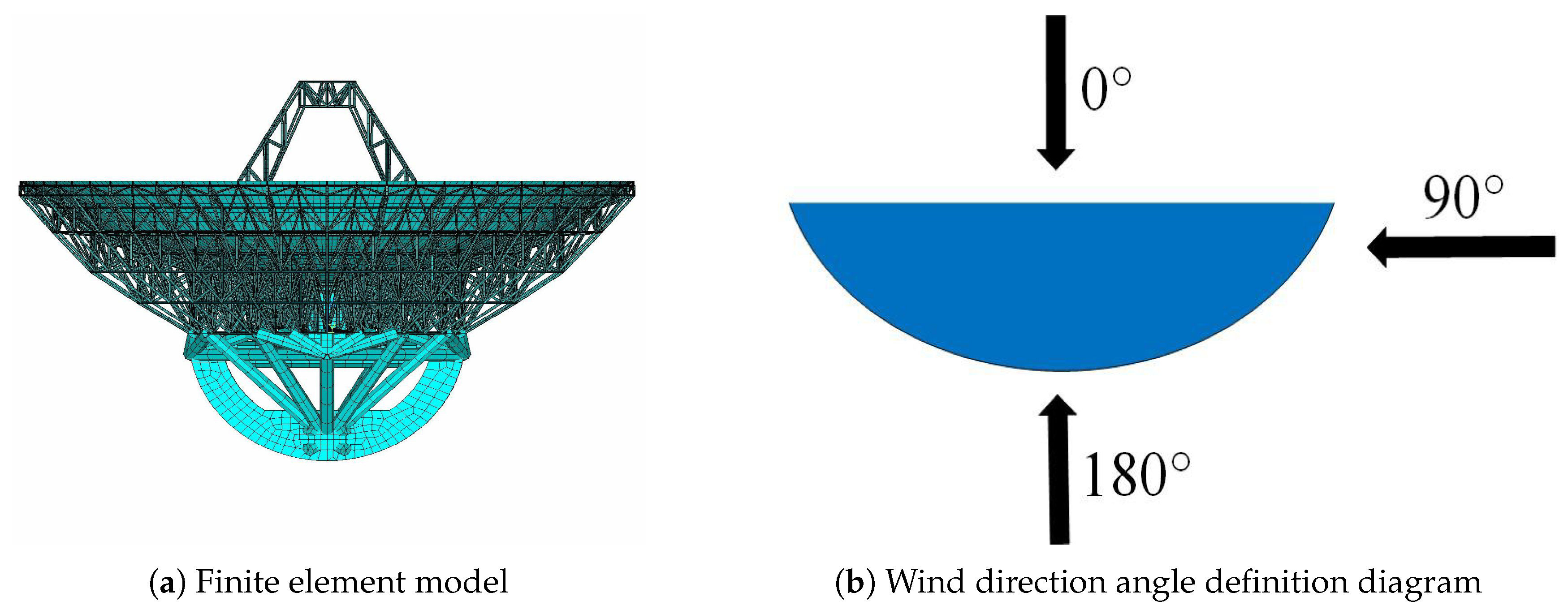
4.1. Finite Element Simulation
4.2. Training Sample Construction
4.3. Surrogate Model Training
5. Virtual and Real Mapping
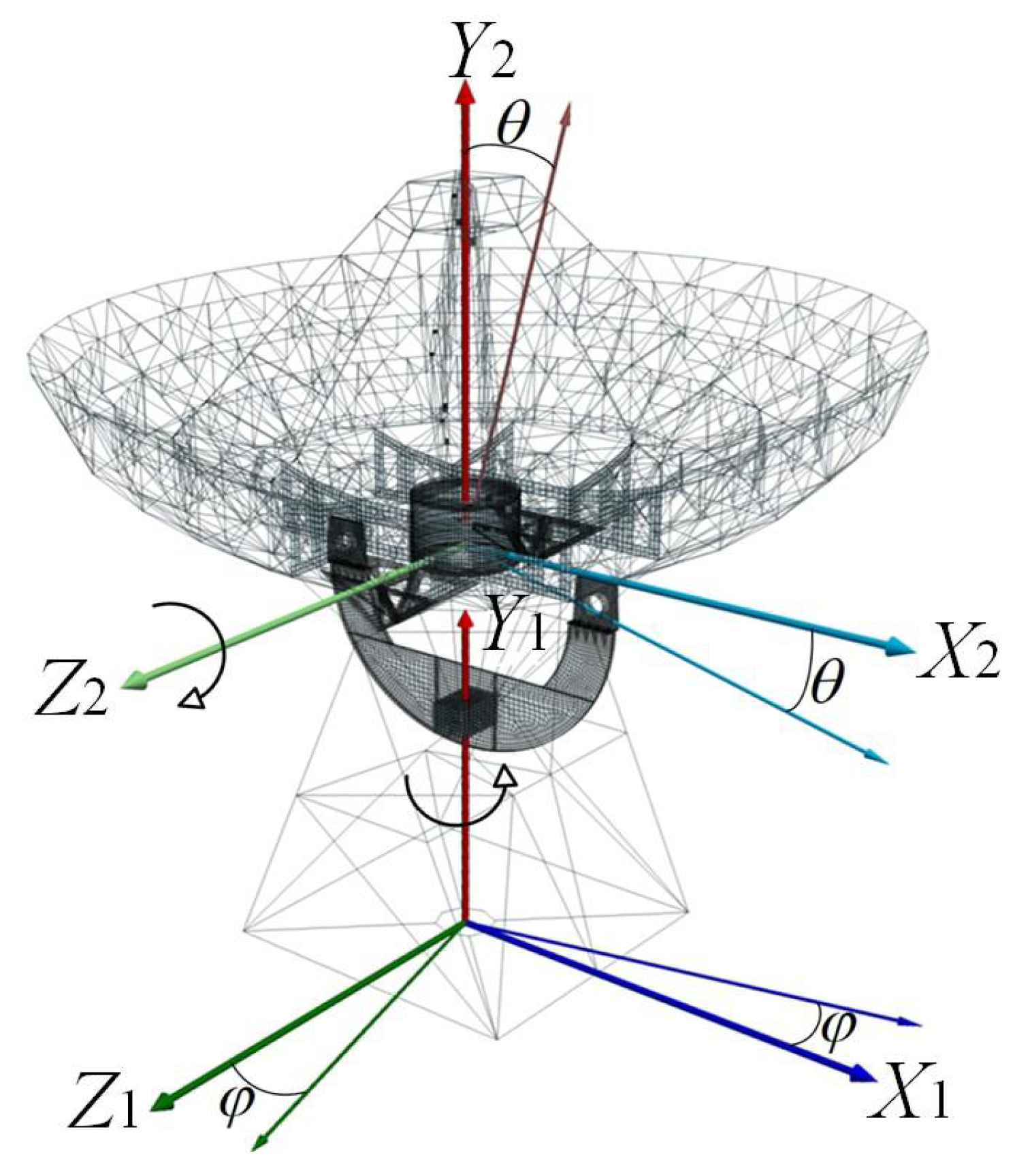
5.1. Motion Behavior Mapping
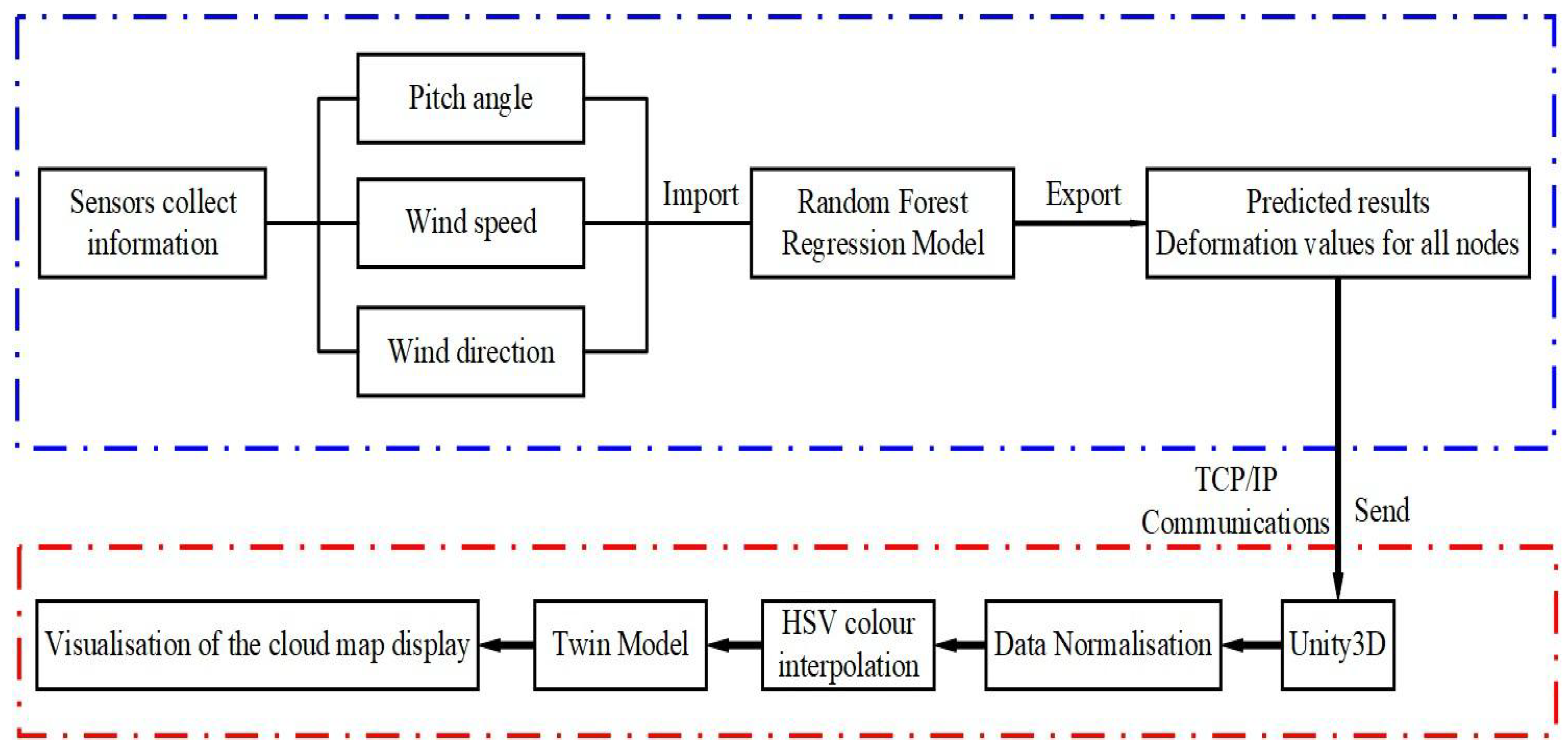
5.2. Mechanical State Mapping
6. Example Analysis and Results
6.1. Experimental Prototype and Interface Construction
6.2. Operating Pesult
6.2.1. Lightweight Model Results
6.2.2. The Training Results of the Surrogate Model
6.2.3. Interface Operation Results
6.2.4. Real-Time Analysis Results of DTs
7. Conclusions
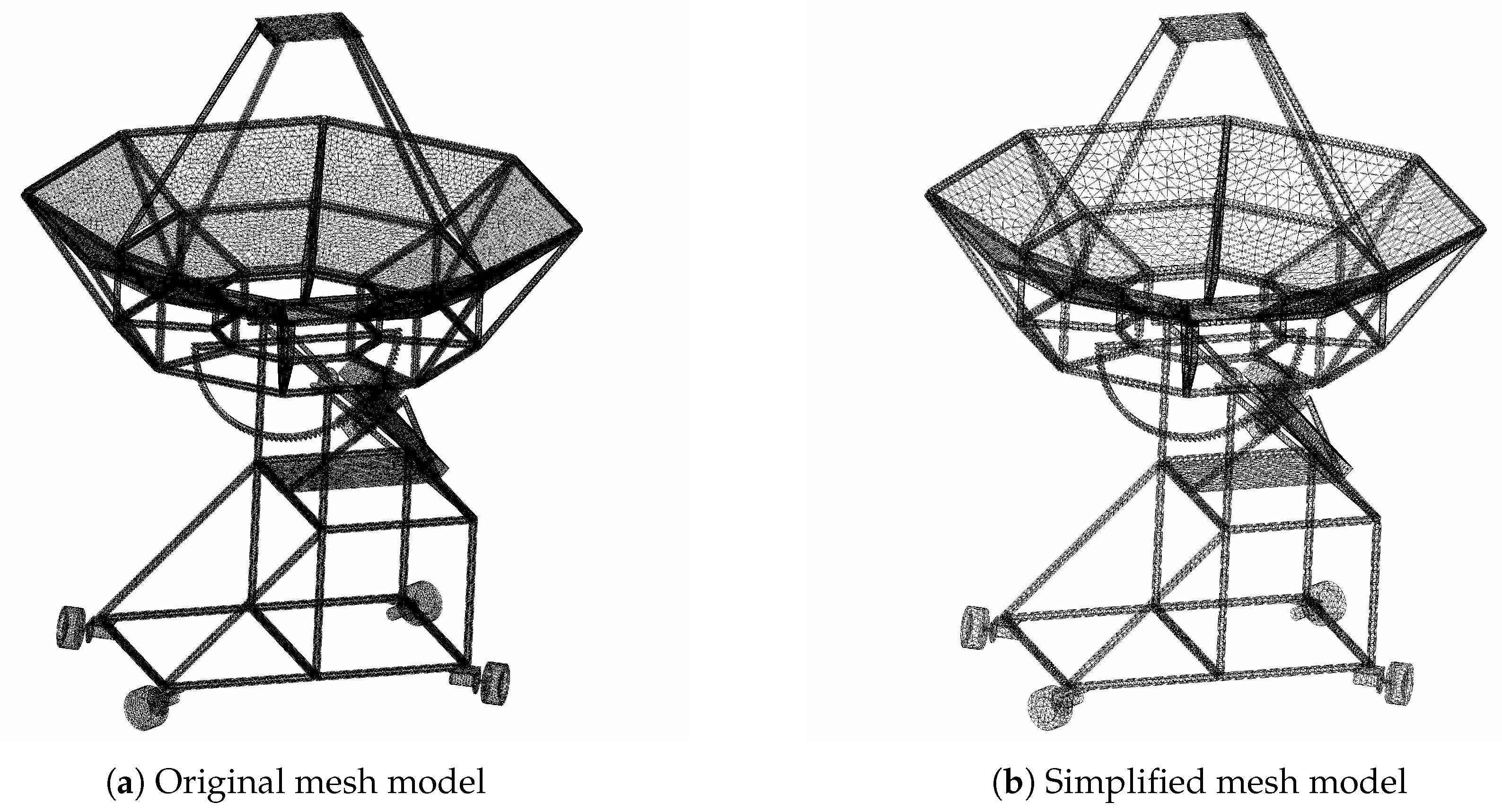
- Based on the improved QEM mesh simplification algorithm, a lightweight twin model of the antenna is established. Under the premise of ensuring a high degree of consistency with the physical entity, the mesh is simplified by about 47.9%, which effectively reduces the calculation amount of structural performance data.
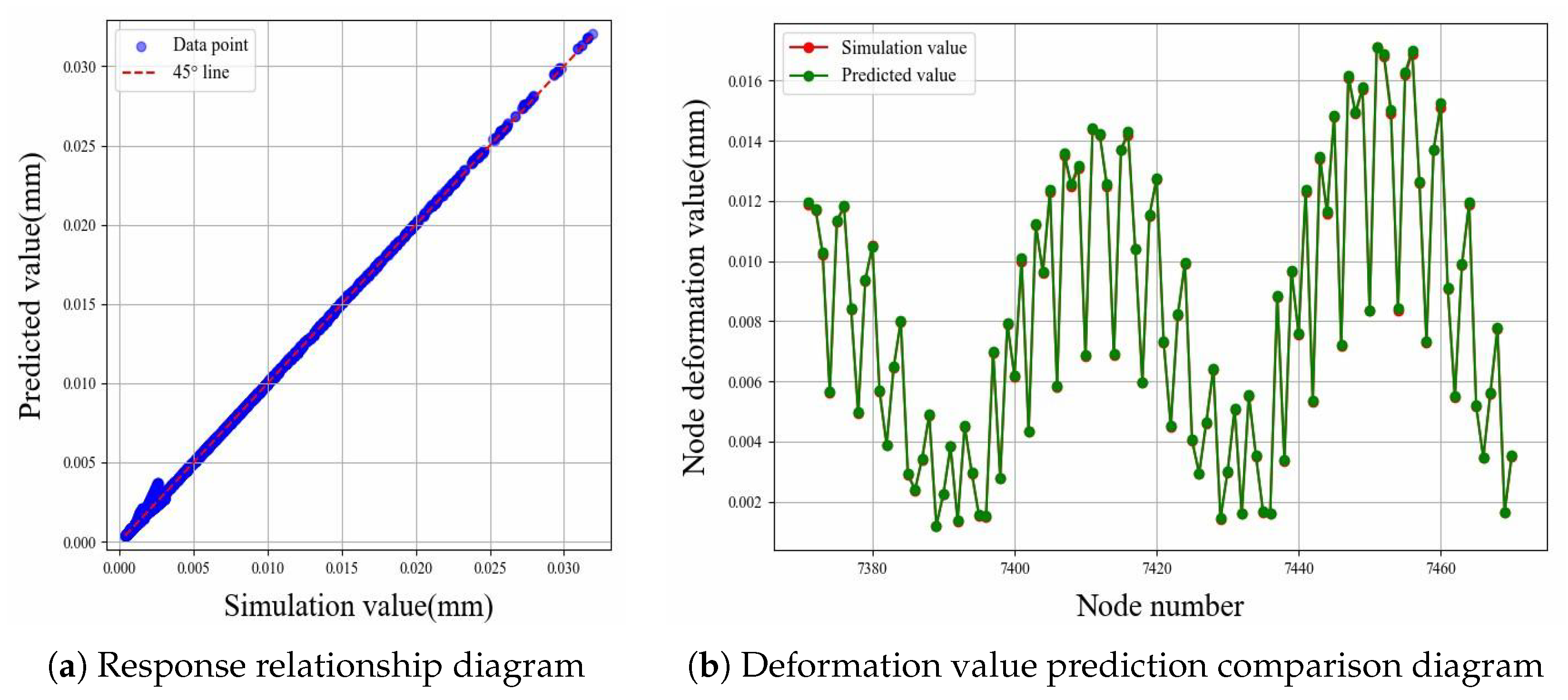
- Based on the RF regression algorithm, the surrogate model of the structural performance of the antenna primary reflector is established. Through the example verification, the average prediction accuracy of the model is 0.98, and the root average square error value is at a low level, which has high prediction accuracy. At the same time, compared with the finite element model, its one-time calculation time is about 0.4 s, the efficiency is optimized by 98.3%, and the time cost is greatly reduced.
- Based on the Unity3D engine, a human–machine interaction visualization operating system was built. By using data communication, the monitoring data from sensors and the predicted data from proxy models were mapped in real time to the twin model. This achieved a DT intelligent monitoring and evaluation system for radio telescopes that integrates real-time simulation and prediction assessment of the structural status, monitoring, and assessment of motion status, status visualization, and a human–machine interaction interface. Finally, through experiments with a prototype antenna, it was verified that the DT method described in this paper is feasible and effective.
- The working conditions studied in this paper are based on gravity and steady-state wind loads; however, in actual operation, the antenna will be subject to dynamic loads such as pulsating winds, sunshine temperature difference loads, and inertia loads. Therefore, the subsequent research will explore the structural mechanics of the antenna under multi-field coupling conditions with more comprehensive influencing factors and integrate the actual measurement data to establish a more accurate finite element model and high-fidelity predictive surrogate model so as to realize the accurate prediction and evaluation of antenna’s mechanical state, and truly realize the intelligent monitoring and operation and maintenance of the antenna.
- The current study mainly focuses on establishing the theoretical framework of DTs and simulation verification. Future work will further expand the application scope of this technology, especially for the practical application of the Nanshan 26 m radio telescope and larger aperture antennas.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rahmat-Samii, Y.; Haupt, R. Reflector antenna developments: A perspective on the past, present and future. Antennas Propag. Mag. 2015, 57, 85–95. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, L.; Xiang, B. Development of active surface technology of large radio telescope antennas. Sci. Sin.-Phys. Mech. Astron. 2017, 47, 059503. (In Chinese) [Google Scholar] [CrossRef]
- Gasparetto, V.E.; Reid, J.; ElSayed, M.S. Passive-tuned mass dampers for the pointing accuracy mitigation of VLBI earth-based antennae subject to aerodynamic gust. Appl. Mech. 2023, 4, 816–840. [Google Scholar] [CrossRef]
- Taljaard, C. Engineering performance management: Design to operation. In Observatory Operations: Strategies, Processes, and Systems X; SPIE: Bellingham, WA, USA, 2024; Volume 13098, pp. 264–276. [Google Scholar] [CrossRef]
- Artz, T.; Springer, A.; Nothnagel, A. A complete VLBI delay model for deforming radio telescopes: The Effelsberg case. J. Geod. 2014, 88, 1145–1161. [Google Scholar] [CrossRef]
- Madanayake, A.; Wijenayake, C.; Dansereau, D.G. Multidimensional (MD) Circuits and Systems for Emerging Applications Including Cognitive Radio, Radio Astronomy, Robot Vision and Imaging. Circuits Syst. Mag. IEEE 2013, 13, 10–43. [Google Scholar] [CrossRef]
- Prandoni, I.; Murgia, M.; Tarchi, A. The Sardinia Radio Telescope: From a Technological Project to a Radio Observatory. Astron. Astrophys. 2017, 608, A40. [Google Scholar] [CrossRef]
- Tofani, G.; Alvito, G.; Ambrosini, R. Status of the sardinia radio telescope project. In Ground-Based and Airborne Telescopes II; SPIE: Bellingham, WA, USA, 2017; Volume 7012, pp. 162–173. [Google Scholar] [CrossRef]
- Guo, W.; Zhang, B. Design and realisation of lightning protection and online monitoring system for large fully movable radio telescope. China Equip. Eng. 2023, 24, 103–105. (In Chinese) [Google Scholar]
- Barbie, A.; Hasselbring, W. From Digital Twins to Digital Twin Prototypes: Concepts, Formalization, and Applications. IEEE Access 2024, 12, 75337–75365. [Google Scholar] [CrossRef]
- Guerra-Zubiaga, D.; Santos, M.C.D.; Voicu, R.C. A digital twin approach to support a multi-task industrial robot operation using design of experiments. J. Braz. Soc. Mech. Sci. Eng. 2024, 46, 516. [Google Scholar] [CrossRef]
- Hartwell, A.; Montana, F.; Jacobs, W. Distributed digital twins for health monitoring: Resource constrained aero-engine fleet management. Aeronaut. J. 2024, 315, 1556–1575. [Google Scholar] [CrossRef]
- Tripathi, V.; Caizzone, S. Virtual Validation of In-Flight GNSS Signal Reception during Jamming for Aeronautics Applications. Aerospace 2024, 11, 204. [Google Scholar] [CrossRef]
- Zhang, Q.; Wu, P.; Zhao, Z. Design and application of digital twin system architecture for large radio telescope. Comput. Integr. Manuf. Syst. 2021, 27, 364–373. (In Chinese) [Google Scholar] [CrossRef]
- Taljaard, C.; Chrysostomou, A. Sculpting a maintenance twin for SKA. In Modeling, Systems Engineering, and Project Management for Astronomy IX; SPIE: Bellingham, WA, USA, 2020; Volume 11450, pp. 79–91. [Google Scholar] [CrossRef]
- Li, Q.; Jiang, P.; Li, H. Prognostics and health management of FAST cable-net structure based on digital twin technology. Res. Astron. Astrophys. 2020, 20, 67. [Google Scholar] [CrossRef]
- Pelham, T. Rapid antenna and array analysis for virtual prototyping. Int. Conf. Radar Syst. 2022, 2022, 278–282. [Google Scholar] [CrossRef]
- Bazaz, S.M.; Lohtander, M.; Varis, J. 5-Dimensional Definition for a Manufacturing Digital Twin. Procedia Manuf. 2019, 38, 1705–1712. [Google Scholar] [CrossRef]
- Liu, H.; Gillespie, M.; Chislett, B. Surface Simplification using Intrinsic Error Metrics. ACM Trans. Graph. (TOG) 2023, 42, 1–17. [Google Scholar] [CrossRef]
- Sidibe, F.M.; Lesnaya, L.; Streknev, D. Antenna Design and Maximum Operation Range of the Wind Profiler. In Proceedings of the 2023 IEEE Ural-Siberian Conference on Biomedical Engineering, Radioelectronics and Information Technology, Yekaterinburg, Russia, 15–17 May 2023; pp. 96–99. [Google Scholar] [CrossRef]
- Li, S.; Han, B.; Liu, S. Simulation-driven Wind Load Analysis and Prediction for Large Steerable Radio Telescopes. Res. Astron. Astrophys. 2023, 23, 024001. [Google Scholar] [CrossRef]
- Chai, X.; Eisenbart, B.; Nikzad, M. Application of KNN and ANN Metamodeling for RTM Filling Process Prediction. Materials 2023, 16, 6115. [Google Scholar] [CrossRef] [PubMed]
- Wu, D.; Jennings, C.; Terpenny, J. A Comparative Study on Machine Learning Algorithms for Smart Manufacturing: Tool Wear Prediction Using Random Forests. J. Manuf. Sci. Eng. 2017, 139, 071018. [Google Scholar] [CrossRef]
- Guillory, J.; Truong, D.; Wallerand, J.P. Determination of the reference point of a radio telescope using a multilateration-based coordinate measurement prototype. Precis. Eng. 2023, 83, 69–81. [Google Scholar] [CrossRef]
- Alremeithi, K.; Sealy, W. The use of digital twin for mobile robot swarm task allocation. Manuf. Lett. 2017, 41, 1200–1208. [Google Scholar] [CrossRef]
- Rasinta, I. Identification of tomato ripeness levels (Lycopersicum esculentum Miil) using android-based digital image processing. IOP Conf. Ser. Earth Environ. Sci. 2023, 1182, 012003. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Before Simplification | After Simplification | Simplification Rate |
|---|---|---|---|
| Panel | 27,322 | 14,976 | 45.2% |
| Back-up structure | 41,786 | 22,464 | 46.3% |
| Alidade | 51,522 | 24,224 | 53.0% |
| Subsurface | 12,872 | 6296 | 51.1% |
| Elevation gear | 21,010 | 11,792 | 43.9% |
| Working Condition | (mm) | |
|---|---|---|
| working condition 1 | 1.20 × 10−4 | 0.982 |
| working condition 2 | 1.47 × 10−4 | 0.977 |
| Predicted Value (mm) | Simulative Value (mm) | Relative Error (%) | |
|---|---|---|---|
| Maximum | 0.032078 | 0.031589 | 1.54% |
| 0.986 | |||
| 1.16 × 10−4 |
| Model | Average Solution Time (s) |
|---|---|
| Finite element model | 24 |
| RF model | 0.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, H.; Xiang, B.; Mo, S.; Wang, W.; Lin, S.; Lian, P.; Wang, W.; Wang, C. Real-Time State Evaluation System of Antenna Structures in Radio Telescopes Based on a Digital Twin. Appl. Sci. 2025, 15, 3325. https://doi.org/10.3390/app15063325
Cui H, Xiang B, Mo S, Wang W, Lin S, Lian P, Wang W, Wang C. Real-Time State Evaluation System of Antenna Structures in Radio Telescopes Based on a Digital Twin. Applied Sciences. 2025; 15(6):3325. https://doi.org/10.3390/app15063325
Chicago/Turabian StyleCui, Hanwei, Binbin Xiang, Shike Mo, Wei Wang, Shangmin Lin, Peiyuan Lian, Wei Wang, and Congsi Wang. 2025. "Real-Time State Evaluation System of Antenna Structures in Radio Telescopes Based on a Digital Twin" Applied Sciences 15, no. 6: 3325. https://doi.org/10.3390/app15063325
APA StyleCui, H., Xiang, B., Mo, S., Wang, W., Lin, S., Lian, P., Wang, W., & Wang, C. (2025). Real-Time State Evaluation System of Antenna Structures in Radio Telescopes Based on a Digital Twin. Applied Sciences, 15(6), 3325. https://doi.org/10.3390/app15063325