
Controlled Fault Current Interruption Scheme for Improved Fault Prediction Accuracy

Abstract
1. Introduction
2. Short-Circuit Current Prediction Algorithm
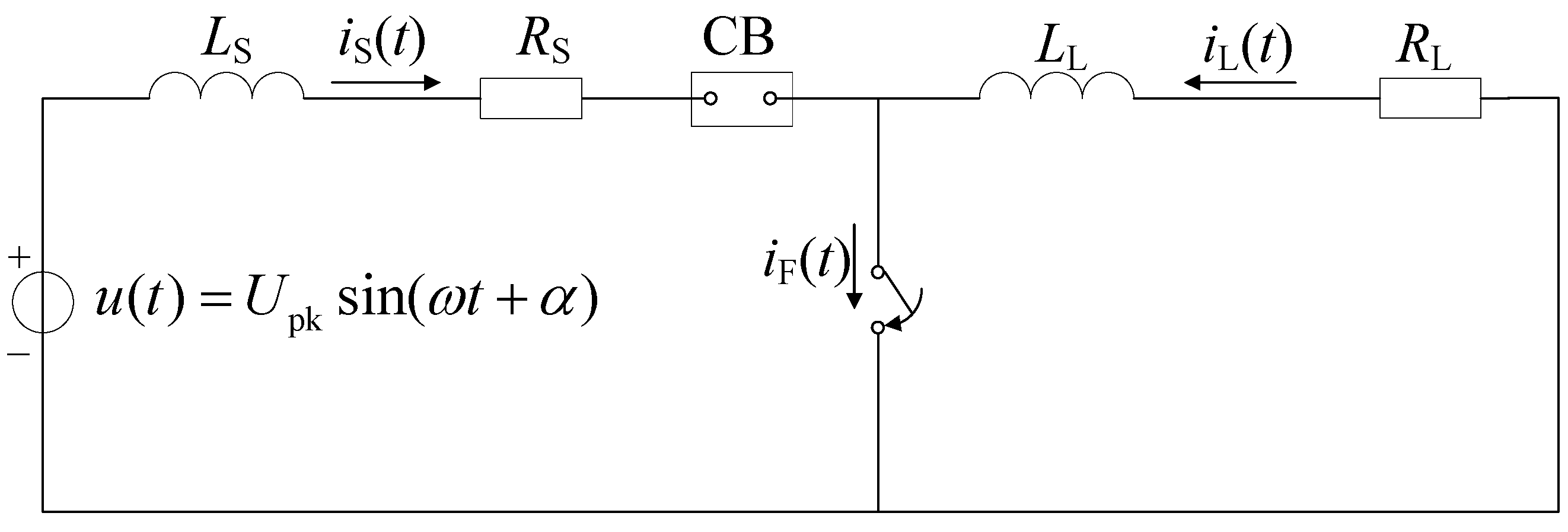
2.1. Short-Circuit Current Model
2.2. Half-Cycle Elimination Method
3. Validation of Half-Cycle Elimination Prediction Algorithm
3.1. Simulation Verification of Over-Zero Prediction Accuracy
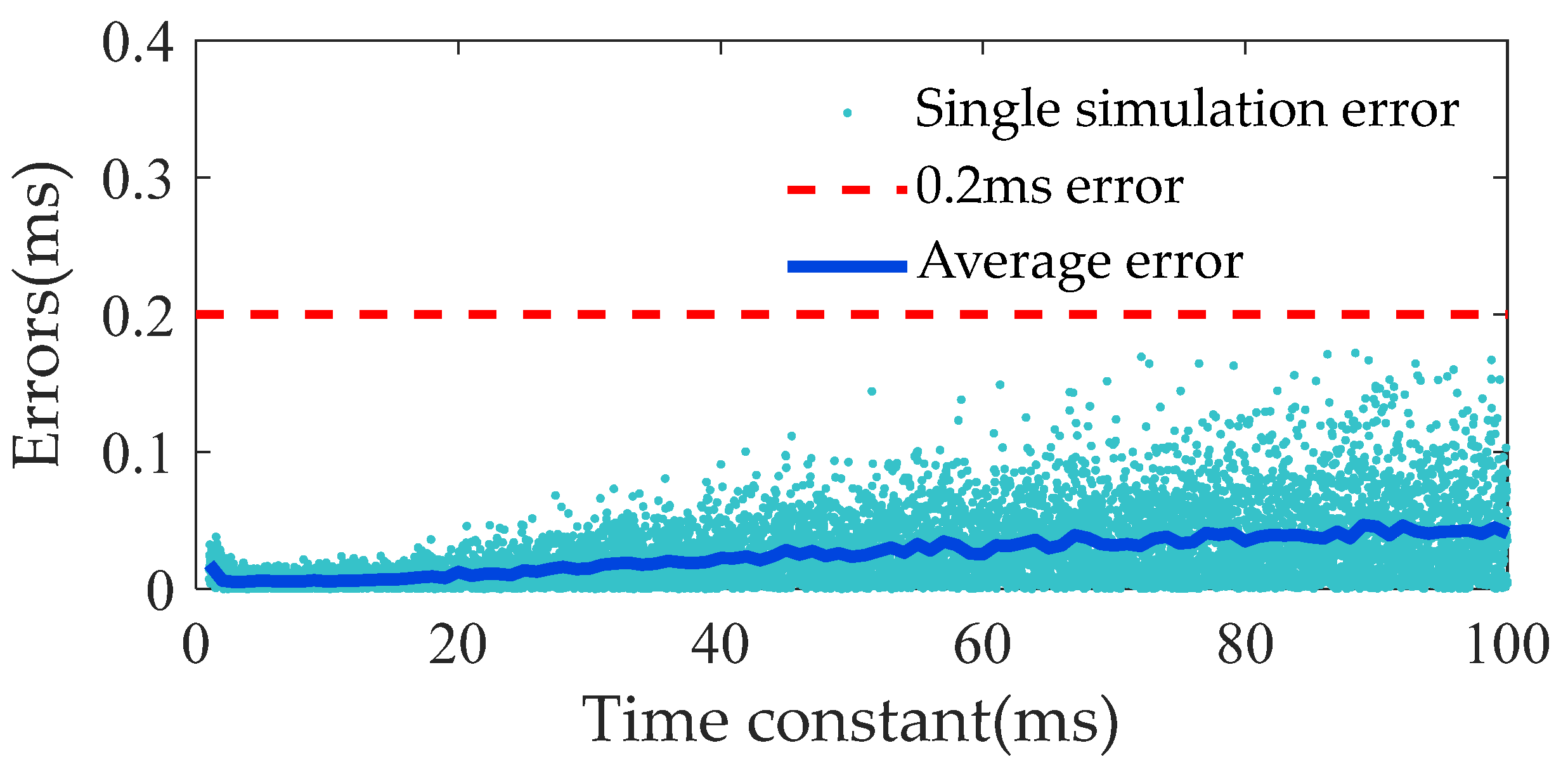
- The effect of the time constant on prediction error: The test shows that the prediction error increases gradually with the increase in time constant, but the error remains within 0.2 ms in the range of 100 ms.
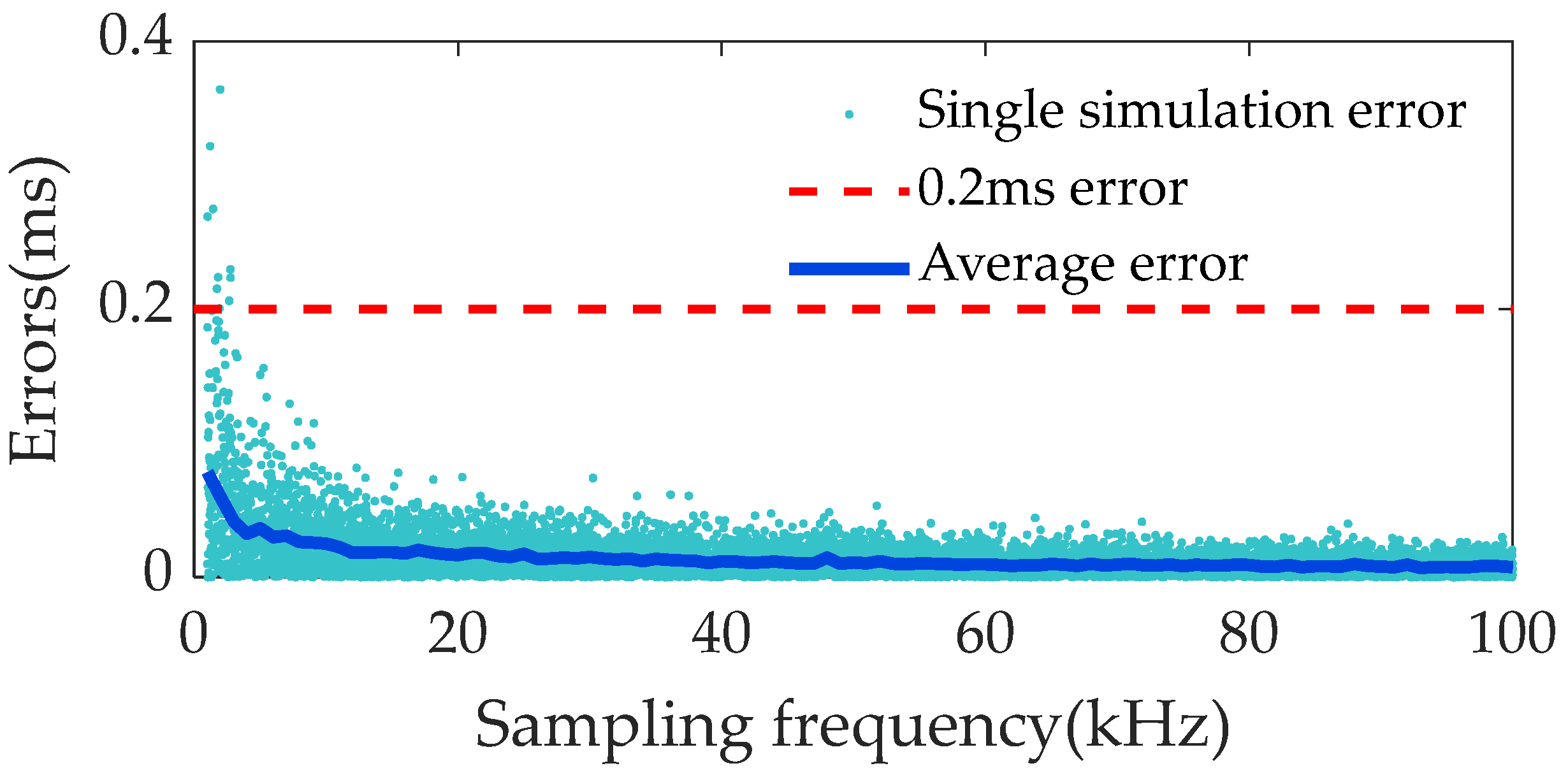
- Sampling frequency on prediction accuracy: Sampling frequency significantly affects the prediction accuracy. When the frequency is increased from 10 kHz to higher, the error is further reduced, and the improvement in accuracy tends to level off above 40 kHz, which verifies the positive effect of high frequency sampling on the accuracy of the algorithm.
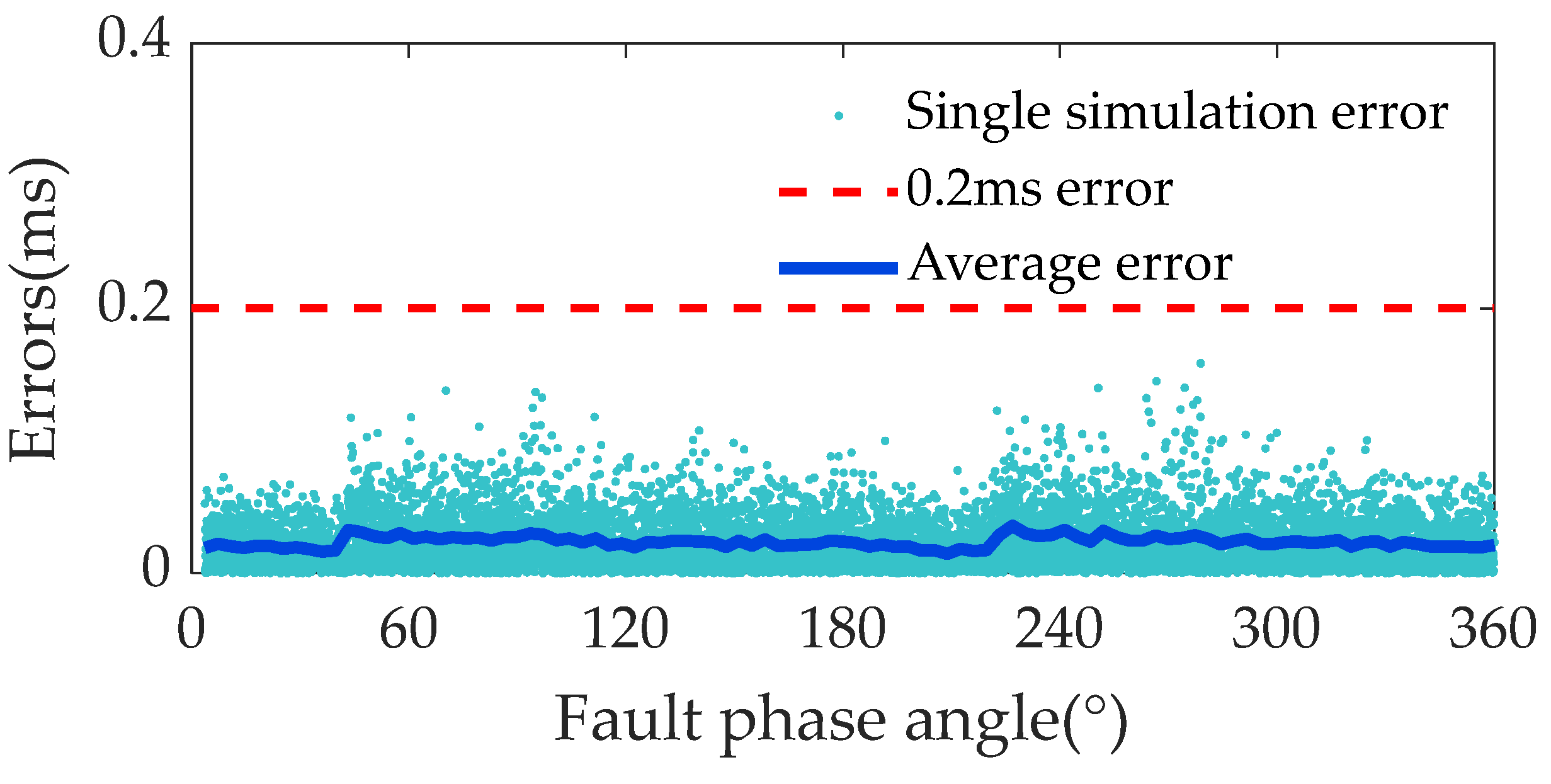
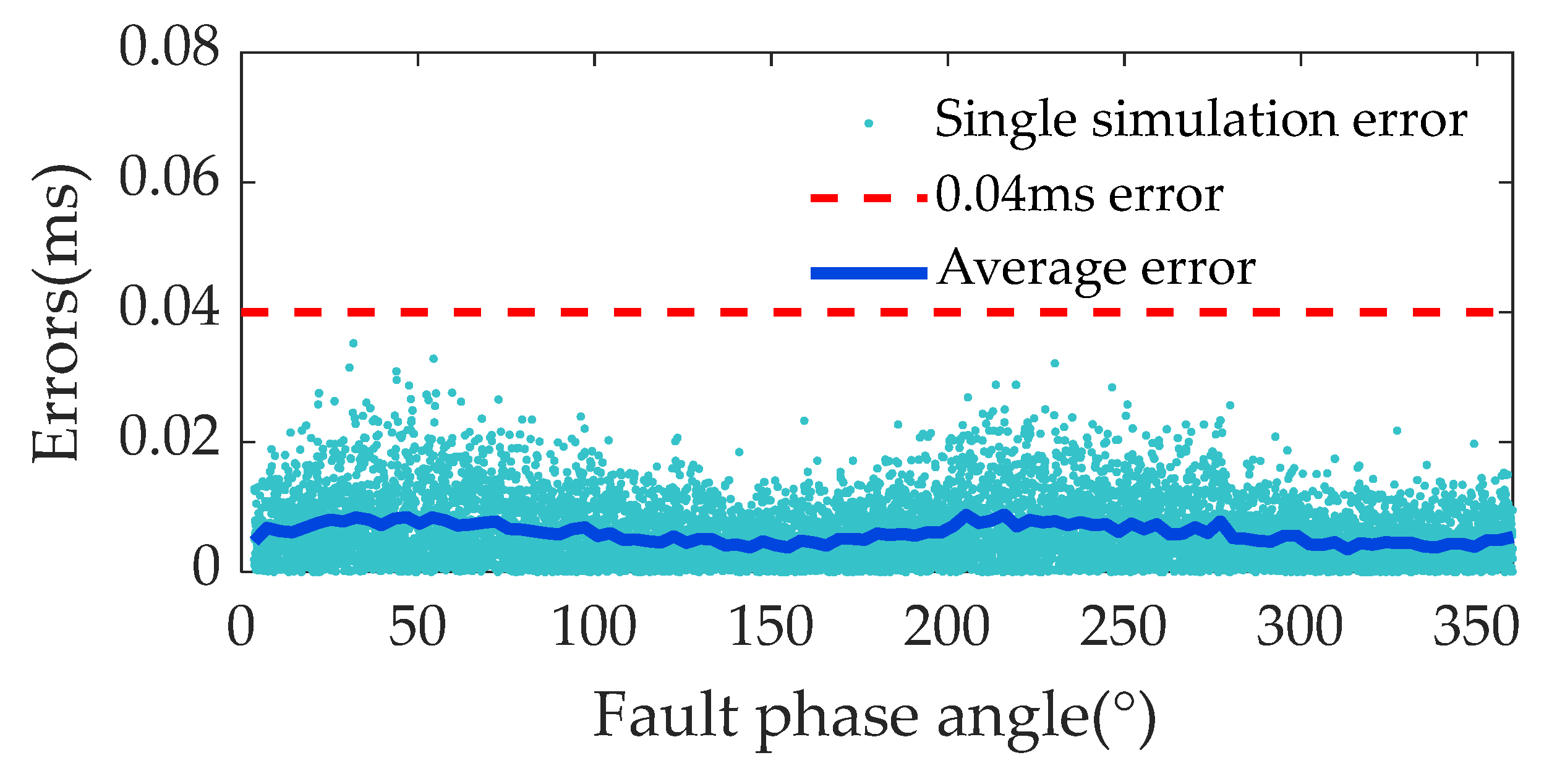
- Influence of fault phase angle: The test covers a range of fault phase angles from 1° to 360°, and the prediction errors fluctuate at specific phase angles; however, they are all within 0.2 ms, which indicates that the algorithm has a strong adaptability in dealing with different phase angles.
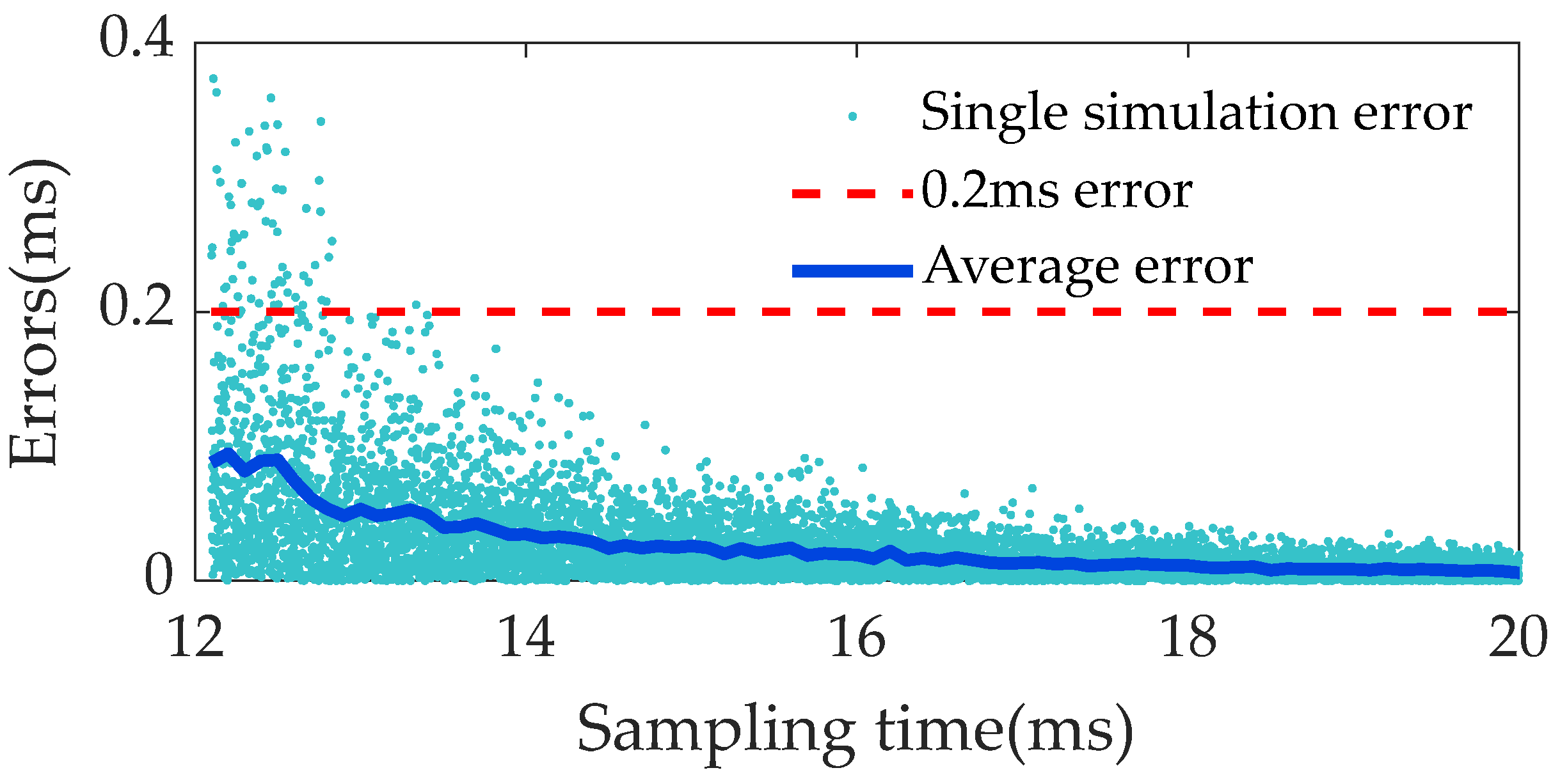
- Sampling time constraints: Too short a sampling time affects the algorithm’s accuracy, but when the sampling time exceeds 17 ms, the error stabilizes and is sufficient to meet the needs of engineering applications at 15 ms.
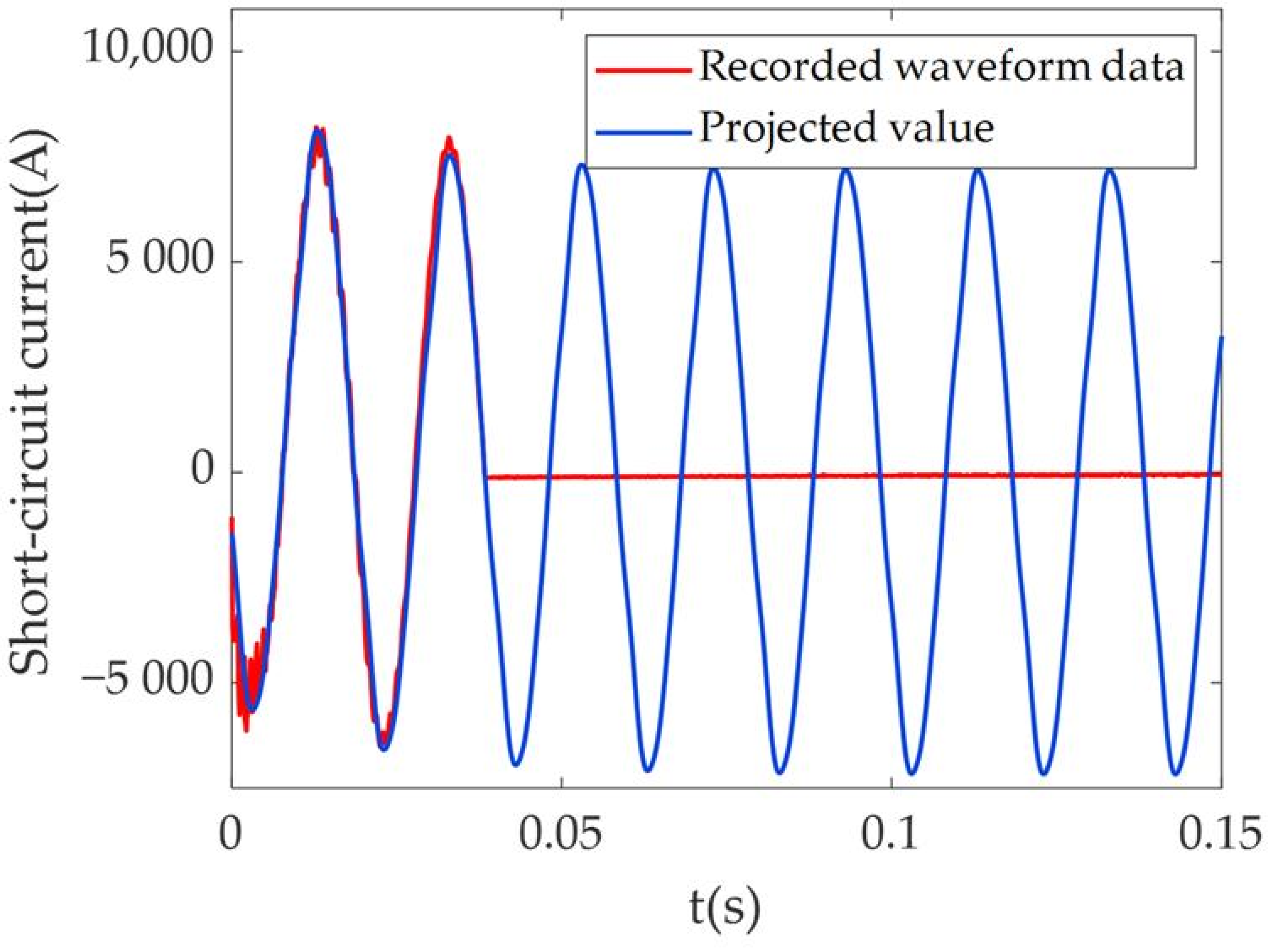
3.2. Validation of Recorded Waveform Data
4. Controlled Fault Current Interruption Sequence
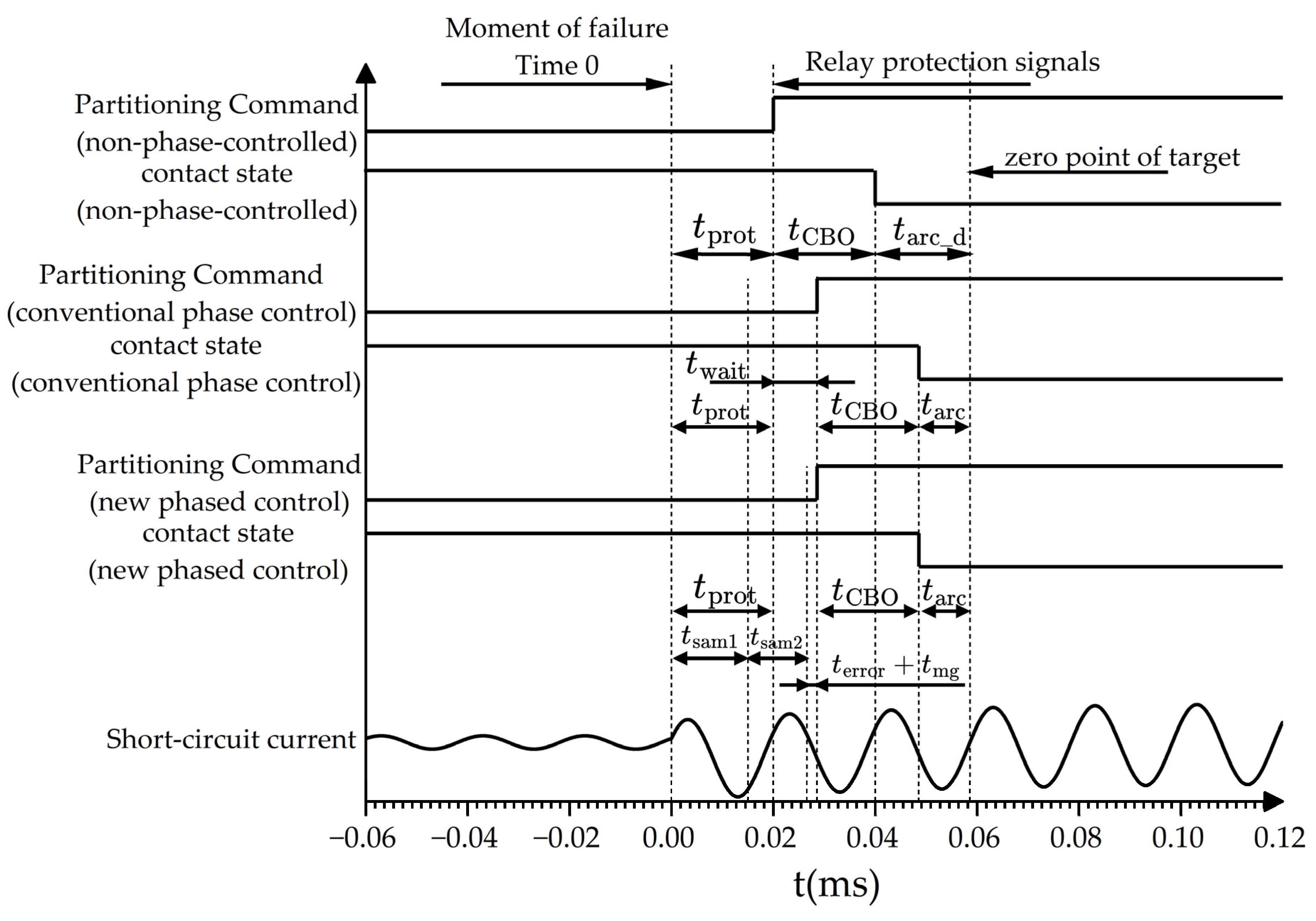
4.1. Double-Sample Time Interruption Sequence
- Set the first sampling time within the response time of the relay protection, and use the data during this time to complete the calculation of the first target zero-crossing point .
- In order that the second calculation will not result in a negative waiting time, combine the results of the batch simulation to obtain the maximum error of the first target zero-crossing point calculation, while considering the algorithm’s time margin , to calculate the time interval of the supplementary data required for the second calculation.
- Based on the results of the first calculation, use the supplementary data to complete the second calculation before the calculation time threshold , to obtain the final confirmation of the target over-zero point . The upper limit of the time interval of the supplementary data to the second waiting time between the signals issued by the controlled switching device improves the accuracy of the calculation of the target over-zero point.
- If the first calculation fails, use the supplementary data to calculate the maximum error of the first target over-zero point calculation.
- If the first calculation fails, issue a switching command at the end of the relay protection response time. If the second calculation fails, input to the controlled switching device to realize controlled switching.
4.2. Analysis of the Integrated Application of the Half-Cycle Elimination Method with Double-Sampling Time Interruption Sequences
5. Conclusions
- A half-period elimination method is innovatively proposed in this paper to accurately predict the zero-crossing point of short-circuit currents. The periodic and non-periodic components are separated, and the recursive least squares method combined with fast Fourier transform is applied to enable the real-time and precise prediction of short-circuit currents.
- Simulation and recording tests are carried out for the half-period elimination method, and the results show that the prediction error of the sixth zero-crossing point of the algorithm is less than 0.2 ms under the conditions of adding 40 dB noise, a sampling frequency of more than 10 kHz, and a sampling time of more than 15 ms, which is of practical value.
- In order to solve the time-wasting problem that may occur in the traditional controlled fault current interruption sequence, this paper further develops a double-sampling controlled fault current interruption sequence. The sequence optimizes the calculation process of the target over-zero point and improves the accuracy and timeliness of prediction through two-stage sampling and calculation. Experimental results show that the sequence can significantly improve the accuracy of over-zero point prediction and effectively reduce the waiting time of the system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Short-circuit current flowing through the circuit breaker | |
| Base wave amplitude of steady-state short-circuit current | |
| Voltage initial phase angle | |
| Phase angle between steady-state short-circuit current and supply voltage | |
| Initial phase of the fundamental wave in the periodic component of the short-circuit current (the difference between and ) | |
| Starting value of DC component | |
| Decay time constant | |
| Third harmonic amplitude of steady-state short-circuit current | |
| Initial phase of the third harmonic in the periodic component of the short-circuit current | |
| The fifth harmonic amplitude of the steady-state short-circuit current | |
| Initial phase of the fifth harmonic in the periodic component of the short-circuit current | |
| Fundamental wave period | |
| Superposition of short-circuit currents half a fundamental wave period apart | |
| Relay protection response time | |
| Circuit breaker opening time | |
| Arcing time for randomized opening | |
| Minimum arcing time | |
| First sampling time | |
| Second sampling time | |
| Algorithmic error time | |
| Algorithmic time margin |
References
- Kasikci, I. Short Circuits in Power Systems: A Practical Guide to IEC 60909-0; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Tleis, N.D. Power Systems Modelling and Fault Analysis: Theory and Practice; Newnes: New South Wales, Australia, 2008. [Google Scholar]
- Yadav, S.; Suman, G.K.; Mehta, R.K. Study of electromagnetic forces on windings of high voltage transformer during short circuit fault. In Proceedings of the 2020 3rd International Conference on Energy, Power and Environment: Towards Clean Energy Technologies, Sydney, Australia, 20–22 April 2021; pp. 1–5. [Google Scholar]
- Kothavade, J.U.; Kundu, P. Investigation of electromagnetic forces in converter transformer. In Proceedings of the 2021 IEEE 2nd International Conference on Smart Technologies for Power, Energy and Control (STPEC), Noida, India, 29–31 July 2021; pp. 1–6. [Google Scholar]
- Kodama, Y.; Otani, K. Short-Circuit Point Estimation Method for Distribution Lines Using Smart-Meters. IEEJ Trans. Electr. Electron. Eng. 2024, 19, 1976–1986. [Google Scholar] [CrossRef]
- Zhang, Y.; Pei, X.; Li, Z.; Zhou, P. Short-circuit current limiting control strategy for single-phase inverter based on adaptive reference feedforward and third harmonic elimination. IEEE Trans. Power Electron. 2021, 37, 5320–5332. [Google Scholar] [CrossRef]
- Zhang, T.; Zhou, Q.; Bian, X. Research on Electromagnetic Characteristics of Interturn Short Circuit in Three Phase Transformers. In Proceedings of the 2024 3rd International Conference on Energy, Power and Electrical Technology (ICEPET), Beijing, China, 26–28 April 2024; pp. 1039–1043. [Google Scholar]
- Glover, J.D.; Overbye, T.J.; Sarma, M.S. Power System Analysis & Design; Cengage Learning: Boston, MA, USA, 2017. [Google Scholar]
- Jyothi, M.N.; Upadhayay, P.; Reddy, M.D.K.; Rishitha, N. Comparison of Restricted Earth Fault Current Devices for Various Earthing Systems Using ETAP Software. In Proceedings of the 2024 10th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 19–21 January 2024; pp. 535–540. [Google Scholar]
- Xingjian, W.; Jing, S.; Hongkun, C. Short Fault Current Zero Point Drift and Phase-Controlled Interruption Strategy in Three-Phase Power Transmission Lines. In Proceedings of the Annual Conference of China Electrotechnical Society, Chengdu, China, 8–10 December 2023; pp. 46–55. [Google Scholar]
- Li, L.; Wang, D.; Yang, H.; Xiang, B.; Ma, F.; Yu, J.; Li, Y.; Liu, Z. Short-Circuit Fault Current Phase-Controlled Switching Method Based on Fast Vacuum Circuit Breaker. In Proceedings of the 2024 7th International Conference on Electric Power Equipment-Switching Technology (ICEPE-ST), Shenzhen, China, 19–21 April 2024; pp. 228–231. [Google Scholar]
- Wen, H.; Zhang, J.; Yao, W.; Tang, L. FFT-based amplitude estimation of power distribution systems signal distorted by harmonics and noise. IEEE Trans. Ind. Inform. 2017, 14, 1447–1455. [Google Scholar] [CrossRef]
- Peng, H.; Zhu, L.; Mo, W.; Wang, Y.; He, Q.; Wu, X. Zero-crossing Prediction of Short-circuit Current Using Recursive Least Square Algorithm. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Bangkok, Thailand, 16–18 March 2020; pp. 1360–1364. [Google Scholar]
- Chen, Q.; Zhang, G.; Liu, J.; Geng, Y.; Wang, J. Study on fast early detecting and rapid accurate fault parameters estimation method for short-circuit fault. In Proceedings of the 2017 4th International Conference on Electric Power Equipment-Switching Technology (ICEPE-ST), Shenzhen, China, 3–5 November 2017; pp. 509–513. [Google Scholar]
- Cao, J.; Zhao, Y.; Zhang, N.; Wang, W.; Wang, D. A research on zero-cross point forecast method of short circuit current. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 24-26 November 2017; pp. 2385–2389. [Google Scholar]
- Poltl, A.; Frohlich, K. A new algorithm enabling controlled short circuit interruption. IEEE Trans. Power Deliv. 2003, 18, 802–808. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, L.; Hu, Y.; Yang, H.; Xiang, B.; Yao, X. Fast prediction method of short-circuit current zero based on an algorithm of long short term memory [J/OL]. High Volt. Eng. 2023, 12, 1–10. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, D.; Zou, J.; Dong, W. Design of control system for controlled fault interruption based on adaptive RLS algorithm. High Volt. Eng. 2016, 42, 3214–3220. [Google Scholar] [CrossRef]
- Xiongying, D.; Zhihui, H.; Rui, L. Comparison between two methods of zero-cross point prediction for controlled fault current interruption. High Volt. Electr. Appl. 2011, 47, 5–9. [Google Scholar] [CrossRef]
- de Metz-Noblat, B.; Dumas, F.; Poulain, C. Calculation of short-circuit currents. Cah. Tech. 2005, 158, 1–32. [Google Scholar]
- Benesty, J.; Paleologu, C.; Gänsler, T.; Ciochină, S.; Benesty, J.; Paleologu, C.; Gänsler, T.; Ciochină, S. Recursive least-squares algorithms. In A Perspective on Stereophonic Acoustic Echo Cancellation; Springer: Berlin/Heidelberg, Germany, 2011; pp. 63–69. [Google Scholar] [CrossRef]
- Bai, Y.; Li, S.; Chen, W.; Wu, T.; Zhou, L. Study on the time constant of DC component and its influence on short-circuit breaking capacity of circuit breaker. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), Chengdu, China, 14–16 December 2018; pp. 1929–1932. [Google Scholar]
- Luo, C.-j.; Yuan, Z.; Yin, X.-G.; He, J.-J.; Chen, X.-S.; Pan, Y. Zero-cross point prediction of short circuit current for phase controlled interruption based on improved half-wave Fourier algorithm. High Volt. Appar. 2012, 48, 1–6. [Google Scholar] [CrossRef]
- Fang, C.; Lin, M.; Li, W. Investigation on controlled fault current interruption of high voltage circuit breaker based on WLMS algorithm. High Volt. Appar. 2009, 45, 40–43. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Items | Test Scope |
|---|---|
| Time constant | 1~100 ms |
| Sampling frequency | 1~100 kHz |
| Fault phase angle | 1~360° |
| Sampling time | 12~20 ms |
| Method Name | Sampling Time | Inaccuracies |
|---|---|---|
| Adaptive RLS Algorithm [18] | 15 ms | 0.4 ms |
| Improved Half-wave Fourier Algorithm [23] | 10 ms + 2 sampling points | 1 ms |
| WLMS Algorithm [24] | 10 ms | 1 ms |
| Half-cycle elimination method | 15 ms | 0.2 ms |
| Half-cycle elimination method with double-sampling sequence | 15 ms | 0.04 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Long, Q.; Li, H.; Huang, D.; Xue, S.; Huang, J.; Liang, H.; Duan, X. Controlled Fault Current Interruption Scheme for Improved Fault Prediction Accuracy. Appl. Sci. 2025, 15, 3106. https://doi.org/10.3390/app15063106
Yang X, Long Q, Li H, Huang D, Xue S, Huang J, Liang H, Duan X. Controlled Fault Current Interruption Scheme for Improved Fault Prediction Accuracy. Applied Sciences. 2025; 15(6):3106. https://doi.org/10.3390/app15063106
Chicago/Turabian StyleYang, Xu, Qi Long, Hao Li, Dachao Huang, Shupeng Xue, Jiajie Huang, Hongzhang Liang, and Xiongying Duan. 2025. "Controlled Fault Current Interruption Scheme for Improved Fault Prediction Accuracy" Applied Sciences 15, no. 6: 3106. https://doi.org/10.3390/app15063106
APA StyleYang, X., Long, Q., Li, H., Huang, D., Xue, S., Huang, J., Liang, H., & Duan, X. (2025). Controlled Fault Current Interruption Scheme for Improved Fault Prediction Accuracy. Applied Sciences, 15(6), 3106. https://doi.org/10.3390/app15063106