
GIS-Based Approach for Estimating Olive Tree Heights Using High-Resolution Satellite Imagery and Shadow Analysis

 ,
,  , , ,
, , ,  ,
,  ,
,  and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. WorldView-3 Satellite Image
- the positions of 20 Ground Control Points (GCPs) distributed across the scene were obtained through an NRTK (Network Real Time Kinematic) GNSS (Global Navigation Satellite System) survey. The GPSUmbria network [31] was used to determine the GCP positions using the Virtual Reference Station (VRS) mode (Figure 4);
- a Digital Elevation Model (DEM) was derived from the regional vectorial cartography [32] (scale 1:5000) with a resolution of 2 m.
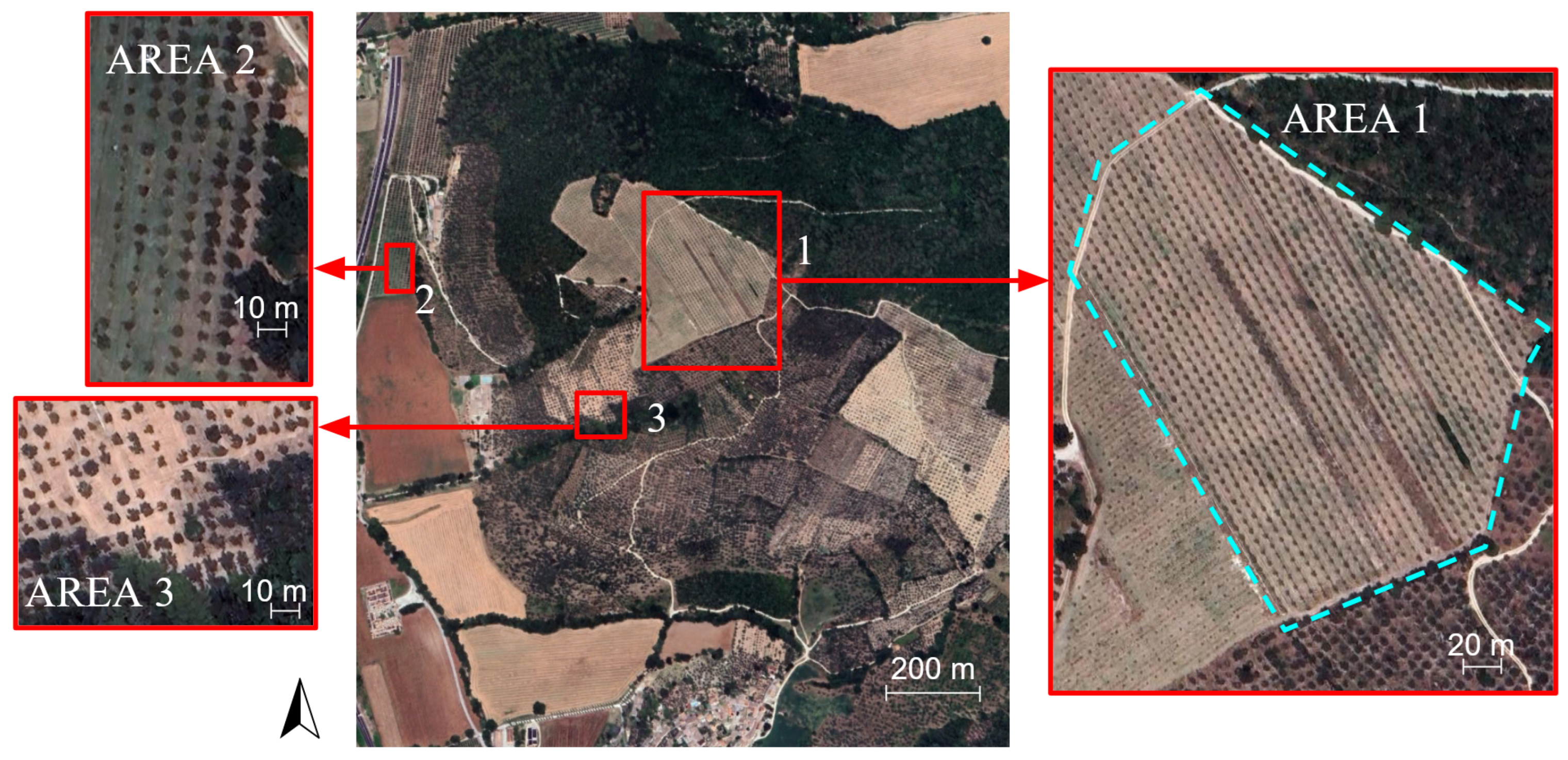
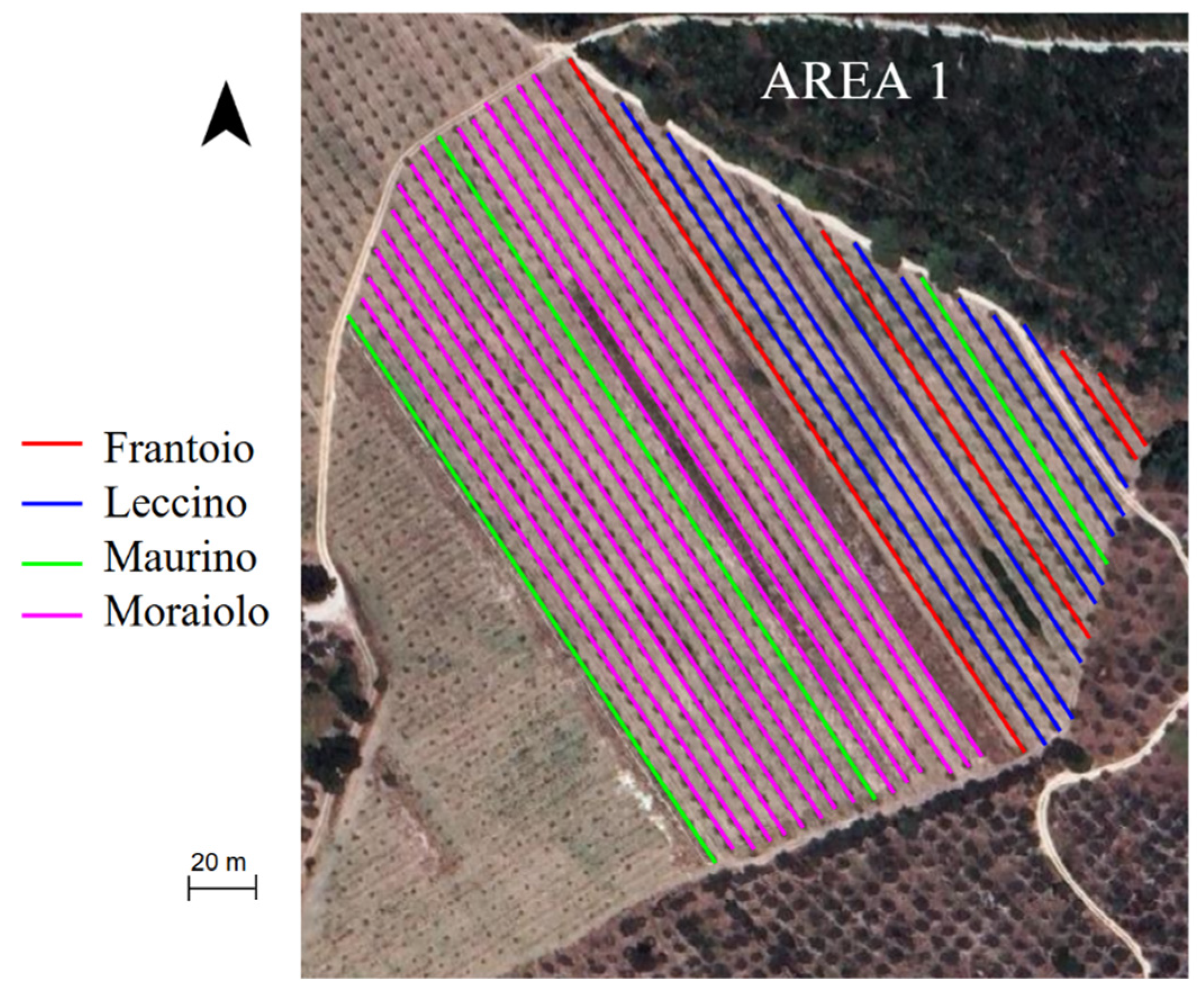
2.2. Study Area and Surveying Methods
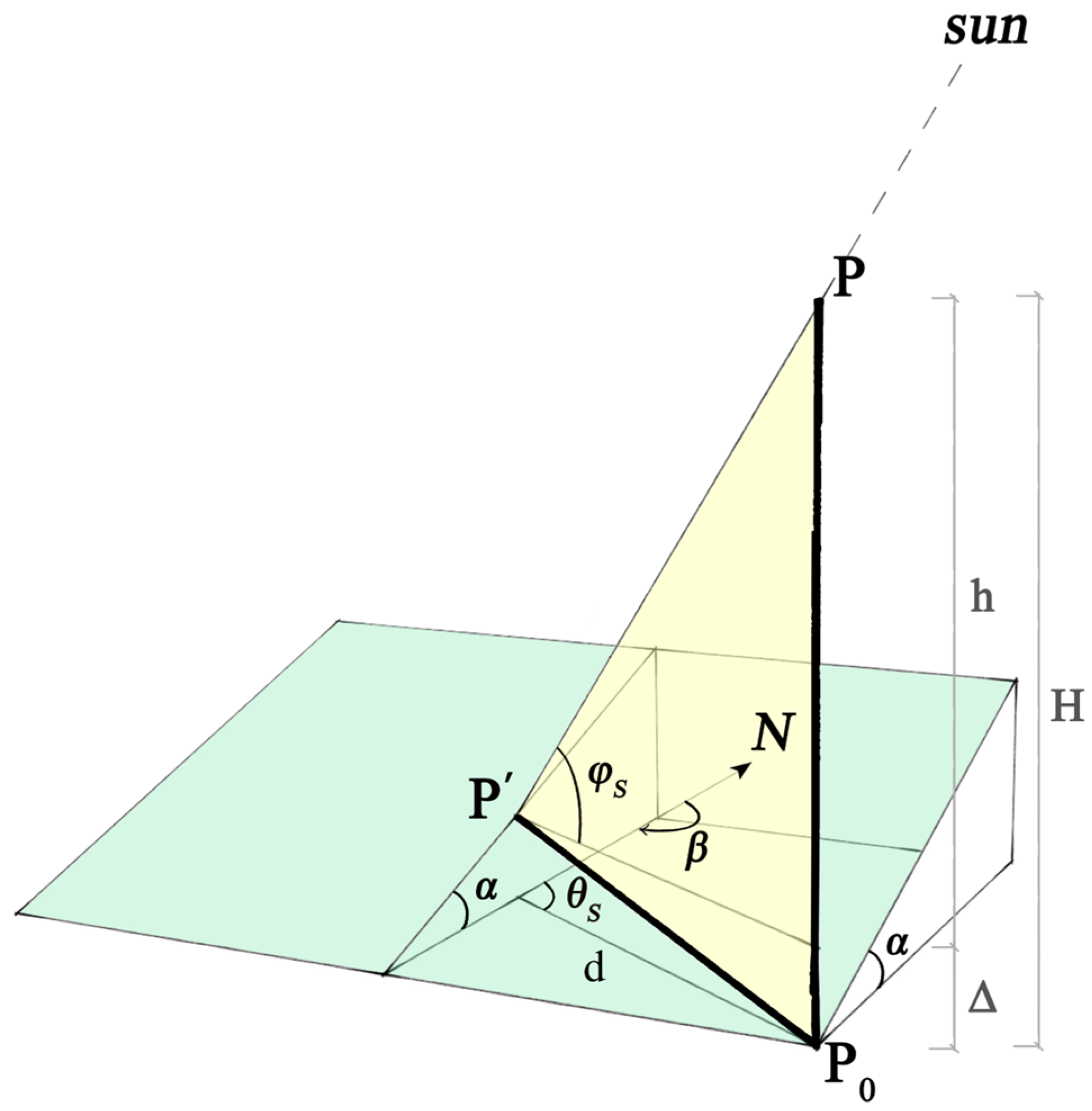
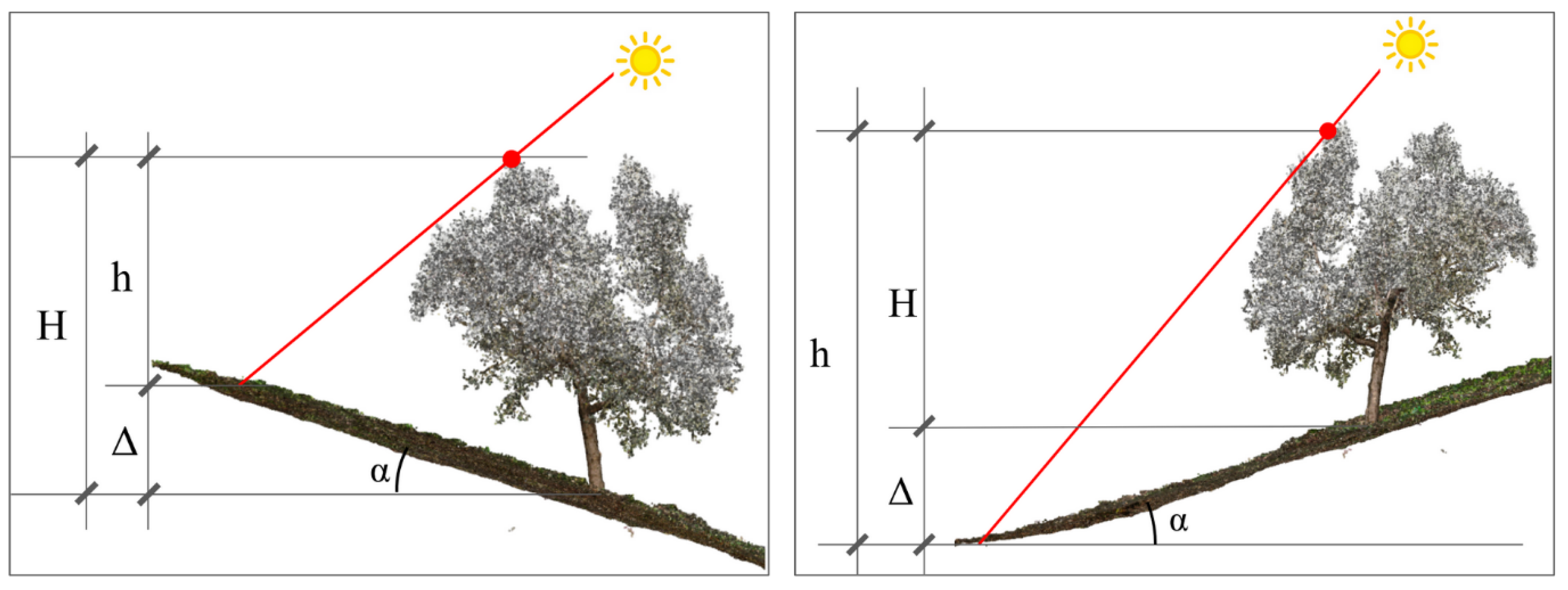
2.3. Geometric Model for Tree Height Measurement
- Sun’s azimuth (θS): the angle between the north direction and the Sun’s direction projected onto a horizontal plane (143.7° for this specific acquisition);
- Sun’s elevation (φS): the angle between the horizontal plane and the direction of the Sun (62.2° for this specific acquisition).

- The shadow length was estimated directly on the orthophoto along the Sun’s azimuth direction by creating a shape file containing a segment with an inclination of 143.7° from the shadow’s endpoint to the corresponding point on the canopy (Figure 9b);
- The segment length was measured using the “Add geometry attributes” tool;
- The two extreme points of the segment were then extracted using the “Extract vertices” tool of the vector menu (Figure 9c);
- The first point of the segment (ground point) was used to measure the terrain’s aspect and slope using the “Extract value by point” tool;
- The second point of the segment (canopy point) was used to identify the elevation of the corresponding point on the canopy from the UAV point cloud, which was later used to validate the tree height measured by the model.

- d represents the shadow length measured along the Sun’s azimuth direction;
- φS represents the Sun’s elevation angle;
- θS represents the Sun’s azimuth angle;
- α represents the terrain’s slope;
- β represents the terrain’s aspect.
3. Results and Validation of Tree Height Estimation
4. Discussion
- The satellite image was orthorectified using a photogrammetrically rigorous model [40], 20 ground control points (GCPs) measured with GNSS RTK receivers, and a digital elevation model (DEM) derived from 1:5000 scale vector cartography. The estimated planimetric accuracy of this orthorectification, based on independent check points (CPs), is approximately 20 cm. It should be noted that such planimetric accuracy cannot be achieved with raw satellite images or without the use of GCPs acquired via differential GPS/GNSS;
- The two drones used are equipped with GNSS/GPS RTK receivers, enabling a planimetric accuracy of a few centimeters and an altimetric accuracy of about one decimeter. Most drones currently in use do not employ RTK technology but rely solely on autonomous GNSS positioning, with accuracies of approximately 10 m planimetrically and 15 m in height. The accuracy of the drone-derived models was anyway further validated through comparisons with additional GCPs;
- The coordinates of the two surveys are compatible and comparable, as both are referenced to the same realization of the WGS84 datum (EPSG:6708 RDN2008/UTM zone 33N (N-E)) materialized by the same Continuously Operating Reference Station Network (CORSN) managed by the Umbria region [31];
- The respective planimetric accuracies of the two methods, with expected maximum deviations of a few decimeters, ensure the consistency of the comparative test, as they prevent the possibility of confusing one olive tree with another within the same row. The use of differential GNSS positioning technologies (here employed in RTK mode) is crucial for avoiding such misidentifications.
- The difference between measurements at the tree’s apex and those at the most easily recognizable point on its shadow;
- The influence of the recognizability of the measured points on the shadow and the corresponding olive tree canopy image;
- The impact of terrain slope, which, for simplicity, is considered constant over the length of the shadow. For this purpose, an average value derived from the reference DEM is used.
4.1. Statistical Results
4.2. Cost–Benefit Analysis
4.3. Limitations of the Proposed Methodology
5. Conclusions and Future Prospects
- The ease or difficulty of identifying specific points on the canopy and shadow;
- The choice of measuring from the canopy’s apex or the most recognizable point;
- The effect of terrain morphology by comparing flat and sloped areas.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test 1a | H_UAV | H_Eq1 |
|---|---|---|
| Mean | 2.106232026 | 2.11813773 |
| Variance | 0.206459206 | 0.184138669 |
| Observations | 612 | 612 |
| Total Variance | 0.195298938 | |
| Hypothesized Difference for Means | 0 | |
| Degrees of Freedom | 1222 | |
| t Statistic | −0.471265718 | |
| P(T ≤ t) One-Tailed | 0.318767557 | |
| t Critical One-Tailed | 1.646101525 | |
| P(T ≤ t) Two-Tailed | 0.637535113 | |
| t Critical Two-Tailed | 1.961907178 |
| Test 1b | H_UAV | H_Eq1 |
|---|---|---|
| Mean | 2.729218636 | 2.704842175 |
| Variance | 0.218173587 | 0.21410717 |
| Observations | 626 | 626 |
| Total Variance | 0.216140378 | |
| Hypothesized Difference for Means | 0 | |
| Degrees of Freedom | 1250 | |
| t Statistic | 0.927630189 | |
| P(T ≤ t) One-Tailed | 0.176889254 | |
| t Critical One-Tailed | 1.646073552 | |
| P(T ≤ t) Two-Tailed | 0.353778508 | |
| t Critical Two-Tailed | 1.961863609 |
| Test 2 | H_UAV | H_Eq1 |
|---|---|---|
| Mean | 3,3134 | 3.351447175 |
| Variance | 0.237838568 | 0.235708219 |
| Observations | 20 | 20 |
| Total Variance | 0.236773394 | |
| Hypothesized Difference for Means | 0 | |
| Degrees of Freedom | 38 | |
| t Statistic | −0.247261197 | |
| P(T ≤ t) One-Tailed | 0.403018587 | |
| t Critical One-Tailed | 1.68595446 | |
| P(T ≤ t) Two-Tailed | 0.806037174 | |
| t Critical Two-Tailed | 2.024394164 |
| Test 3 | H_UAV | H_Eq1 |
|---|---|---|
| Mean | 3.499627756 | 3.4565 |
| Variance | 0.411250197 | 0.387079737 |
| Observations | 20 | 20 |
| Total Variance | 0.399164967 | |
| Hypothesized Difference for Means | 0 | |
| Degrees of Freedom | 38 | |
| t Statistic | 0.215864214 | |
| P(T ≤ t) One-Tailed | 0.415124071 | |
| t Critical One-Tailed | 1.68595446 | |
| P(T ≤ t) Two-Tailed | 0.830248143 | |
| t Critical Two-Tailed | 2.024394164 |
References
- Parra, L. Remote Sensing and GIS in Environmental Monitoring. Appl. Sci. 2022, 12, 8045. [Google Scholar] [CrossRef]
- Sahu, B.; Chatterjee, S.; Mukherjee, S.; Sharma, C. Tools of precision agriculture: A review. Int. J. Chem. Stud. 2019, 7, 2692–2697. [Google Scholar]
- Manfré, L.A.; Hirata, E.; Silva, J.B.; Shinohara, E.J.; Giannotti, M.A.; Larocca, A.P.C.; Quintanilha, J.A. An Analysis of Geospatial Technologies for Risk and Natural Disaster Management. ISPRS Int. J. Geo-Inf. 2012, 1, 166–185. [Google Scholar] [CrossRef]
- Masser, I. Managing our urban future: The role of remote sensing and geographic information systems. Habitat Int. 2001, 25, 503–512. [Google Scholar] [CrossRef]
- Mundia, C.N.; Aniya, M. Analysis of land use/cover changes and urban expansion of Nairobi city using remote sensing and GIS. Int. J. Remote Sens. 2005, 26, 2831–2849. [Google Scholar] [CrossRef]
- Jiang, S.; Jiang, C.; Jiang, W. Efficient structure from motion for large-scale UAV images: A review and a comparison of SfM tools. ISPRS J. Photogramm. Remote Sens. 2020, 167, 230–251. [Google Scholar] [CrossRef]
- Liu, C.-J.; Krylov, V.A.; Kane, P.; Kavanagh, G.; Dahyot, R. IM2ELEVATION: Building Height Estimation from Single-View Aerial Imagery. Remote Sens. 2020, 12, 2719. [Google Scholar] [CrossRef]
- Xu, W.; Feng, Z.; Wan, Q.; Xie, Y.; Feng, D.; Zhu, J.; Liu, Y. Building Height Extraction From High-Resolution Single-View Remote Sensing Images Using Shadow and Side Information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 6514–6528. [Google Scholar] [CrossRef]
- Gavankar, N.L.; Rathod, R.R.; Waghmare, V.N. Estimation of Building Height Using High-Resolution Satellite Imagery. In Proceedings of the 10th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2024), Angers, France, 2–4 May 2024; pp. 83–93. [Google Scholar]
- Izadi, M.H.; Saeedi, P. Three-Dimensional Polygonal Building Model Estimation From Single Satellite Images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2254–2272. [Google Scholar] [CrossRef]
- Liasis, G.; Stavrou, S. Satellite Image Analysis for Shadow Detection and Building Height Estimation. ISPRS J. Photogramm. Remote Sens. 2016, 119, 437–450. [Google Scholar] [CrossRef]
- Xie, Y.; Feng, D.; Xiong, S.; Zhu, J.; Liu, Y. Multi-Scene Building Height Estimation Method Based on Shadow in High Resolution Imagery. Remote Sens. 2021, 13, 2862. [Google Scholar] [CrossRef]
- Rada Giacaman, C.A. High-Precision Measurement of Height Differences from Shadows in Non-Stereo Imagery: New Methodology and Accuracy Assessment. Remote Sens. 2022, 14, 1702. [Google Scholar] [CrossRef]
- Shettigara, V.K.; Sumerling, G.M. Height Determination of Extended Objects Using Shadows in SPOT Images. Photogramm. Eng. Remote Sens. 1998, 64, 35–44. [Google Scholar]
- Verma, N.K. Estimating Trunk Diameter at Breast Height for Scattered Eucalyptus Trees: A Comparison of Remote Sensing Systems and Analysis Techniques. Ph.D. Thesis, University of New England, Armidale, Australia, 2015. [Google Scholar]
- WorldView3. Available online: https://earth.esa.int/eogateway/missions/worldview-3 (accessed on 10 December 2024).
- Lelong, C.C.D.; Tshingomba, U.K.; Soti, V. Assessing Worldview-3 Multispectral Imaging Abilities to Map the Tree Diversity in Semi-Arid Parklands. Int. J. Appl. Earth Obs. Geoinf. 2020, 93, 102211. [Google Scholar] [CrossRef]
- Liu, X.; Frey, J.; Denter, M.; Zielewska-Büttner, K.; Still, N.; Koch, B. Mapping Standing Dead Trees in Temperate Montane Forests Using a Pixel- and Object-Based Image Fusion Method and Stereo WorldView-3 Imagery. Ecol. Indic. 2021, 133, 108438. [Google Scholar] [CrossRef]
- Tong, F.; Tong, H.; Mishra, R.; Zhang, Y. Delineation of Individual Tree Crowns Using High Spatial Resolution Multispectral WorldView-3 Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7751–7776. [Google Scholar] [CrossRef]
- Vermote, E.F.; Skakun, S.; Becker-Reshef, I.; Saito, K. Remote Sensing of Coconut Trees in Tonga Using Very High Spatial Resolution WorldView-3 Data. Remote Sens. 2020, 12, 3113. [Google Scholar] [CrossRef]
- Ferreira, M.P.; Lotte, R.G.; D’Elia, F.V.; Stamatopoulos, C.; Kim, D.-H.; Benjamin, A.D. Accurate Mapping of Brazil Nut Trees (Bertholletia excelsa) in Amazonian Forests Using WorldView-3 Satellite Images and Convolutional Neural Networks. Ecol. Inform. 2021, 63, 101302. [Google Scholar] [CrossRef]
- Rahman, M.M.; Robson, A.; Bristow, M. Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango. Remote Sens. 2018, 10, 1866. [Google Scholar] [CrossRef]
- Li, D.; Ke, Y.; Gong, H.; Li, X. Object-Based Urban Tree Species Classification Using Bi-Temporal WorldView-2 and WorldView-3 Images. Remote Sens. 2015, 7, 16917–16937. [Google Scholar] [CrossRef]
- Johansena, K.; Duanb, Q.; Tua, Y.-H.; Searled, C.; Wuc, D.; Phinn, S.; Robsone, A.; McCabe, M.F. Mapping the Condition of Macadamia Tree Crops Using Multi-Spectral UAV and WorldView-3 Imagery. ISPRS J. Photogramm. Remote Sens. 2020, 165, 28–40. [Google Scholar] [CrossRef]
- Ferreira, M.P.; Wagner, F.H.; Aragão, L.E.; Shimabukuro, Y.E.; de Souza Filho, C.R. Tree species classification in tropical forests using visible to shortwave infrared WorldView-3 images and texture analysis. ISPRS J. Photogramm. Remote Sens. 2019, 149, 119–131. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, H.; Lin, H.; Fang, C. Textural–Spectral Feature-Based Species Classification of Mangroves in Mai Po Nature Reserve from Worldview-3 Imagery. Remote Sens. 2016, 8, 24. [Google Scholar] [CrossRef]
- Solano, F.; Di Fazio, s.; Modica, G. A Methodology Based on GEOBIA and WorldView-3 Imagery to Derive Vegetation Indices at Tree Crown Detail in Olive Orchards. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101912. [Google Scholar] [CrossRef]
- Hively, W.D.; Lamb, B.T.; Daughtry, C.S.T.; Shermeyer, J.; McCarty, G.W.; Quemada, M. Mapping Crop Residue and Tillage Intensity Using WorldView-3 Satellite Shortwave Infrared Residue Indices. Remote Sens. 2018, 10, 1657. [Google Scholar] [CrossRef]
- Ab Majid, I.; Abd Latif, Z.; Adnan, N.A. Tree species classification using worldview-3 data. In Proceedings of the 2016 7th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2016; pp. 73–76. [Google Scholar]
- Catalyst Earth. Available online: https://catalyst.earth/ (accessed on 10 December 2024).
- Radicioni, F.; Stoppini, A.; Tosi, G.; Marconi, L. Multi-constellation Network RTK for Automatic Guidance in Precision Agriculture. In Proceedings of the 2022 IEEE Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Perugia, Italy, 3–5 November 2022; pp. 260–265. [Google Scholar] [CrossRef]
- WebGIS CTRonWeb 3.0. Available online: https://siat.regione.umbria.it/webgisctr/ (accessed on 10 December 2024).
- Tombesi, A.; Proietti, P.; Iacovelli, G.; Tombesi, S.; Farinelli, D. Vegetative and productive behaviour of four olive italian cultivars and ‘arbequina’ according to super intensive olive training system in central Italy. In Proceedings of the XXVIII International Horticultural Congress on Science and Horticulture for People (IHC2010): Olive Trends Symposium—From the Olive Tree to Olive Oil: New Trends and Future Challenges, Lisbon, Portugal, 22–27 August 2011. [Google Scholar]
- dji P4 Multispectral. Available online: https://www.dji.com/it/p4-multispectral/specs (accessed on 10 December 2024).
- dji D-RTK 2. Available online: https://www.dji.com/it/d-rtk-2/info#specs (accessed on 10 December 2024).
- dji PHANTOM 4 RTK. Available online: https://www.dji.com/it/phantom-4-rtk/info#specs (accessed on 10 December 2024).
- Agisoft. Available online: https://www.agisoft.com/features/professional-edition/ (accessed on 10 December 2024).
- Brigante, R.; Calisti, R.; Marconi, L.; Proietti, P.; Radicioni, F.; Vinci, A. GNSS NRTK-UAV photogrammetry and LiDAR point clouds for geometric features extraction of olive orchard. In Proceedings of the 2024 IEEE International Workshop on Metrology for Agriculture and Forestry—MetroAgriFor), Padova, Italy, 29–31 October 2024. [Google Scholar]
- QGis. Available online: https://www.qgis.org/ (accessed on 10 December 2024).
- Baiocchi, V.; Giannone, F.; Monti, F. How to Orient and Orthorectify PRISMA Images and Related Issues. Remote Sens. 2022, 14, 1991. [Google Scholar] [CrossRef]
- Baiocchi, V.; Fortunato, S.; Giannone, F.; Marzaioli, V.; Monti, F.; Onori, R.; Ruzzi, L.; Vatore, F. LiDAR RTK Unmanned Aerial Vehicles for security purposes. Geogr. Tech. 2023, 19, 34–42. [Google Scholar] [CrossRef]








| Type of Point | Residual Error—Ground (m) | Residual Error—Image (px) | |||
|---|---|---|---|---|---|
| East | North | Elevation | X | Y | |
| GCPs | 0.099 | 0.103 | 0.025 | 0.33 | 0.36 |
| CPs | 0.168 | 0.145 | 0.035 | 0.56 | 0.51 |
| Test | Number of Trees | Mean Error (m) | Standard Deviation (m) | Mean Error Absolute Value (m) | |
|---|---|---|---|---|---|
| 1a | Total | 612 | 0.015 | 0.190 | 0.140 |
| “1” class | 494 (80.7%) | 0.014 | 0.195 | 0.144 | |
| “0” class | 118 (19.3%) | 0.021 | 0.169 | 0.127 | |
| 1b | Total | 612 | −0.024 | 0.288 | 0.175 |
| 2 | Total | 20 | 0.043 | 0.135 | 0.115 |
| 3 | Total | 20 | 0.038 | 0.121 | 0.101 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brigante, R.; Baiocchi, V.; Calisti, R.; Marconi, L.; Proietti, P.; Radicioni, F.; Regni, L.; Vinci, A. GIS-Based Approach for Estimating Olive Tree Heights Using High-Resolution Satellite Imagery and Shadow Analysis. Appl. Sci. 2025, 15, 3066. https://doi.org/10.3390/app15063066
Brigante R, Baiocchi V, Calisti R, Marconi L, Proietti P, Radicioni F, Regni L, Vinci A. GIS-Based Approach for Estimating Olive Tree Heights Using High-Resolution Satellite Imagery and Shadow Analysis. Applied Sciences. 2025; 15(6):3066. https://doi.org/10.3390/app15063066
Chicago/Turabian StyleBrigante, Raffaella, Valerio Baiocchi, Roberto Calisti, Laura Marconi, Primo Proietti, Fabio Radicioni, Luca Regni, and Alessandra Vinci. 2025. "GIS-Based Approach for Estimating Olive Tree Heights Using High-Resolution Satellite Imagery and Shadow Analysis" Applied Sciences 15, no. 6: 3066. https://doi.org/10.3390/app15063066
APA StyleBrigante, R., Baiocchi, V., Calisti, R., Marconi, L., Proietti, P., Radicioni, F., Regni, L., & Vinci, A. (2025). GIS-Based Approach for Estimating Olive Tree Heights Using High-Resolution Satellite Imagery and Shadow Analysis. Applied Sciences, 15(6), 3066. https://doi.org/10.3390/app15063066