
Power Quality Disturbance Classification Method Based on Unscented Kalman Filter and Kernel Extreme Learning Machine

Abstract
1. Introduction
2. The UKF Detection of PQDs
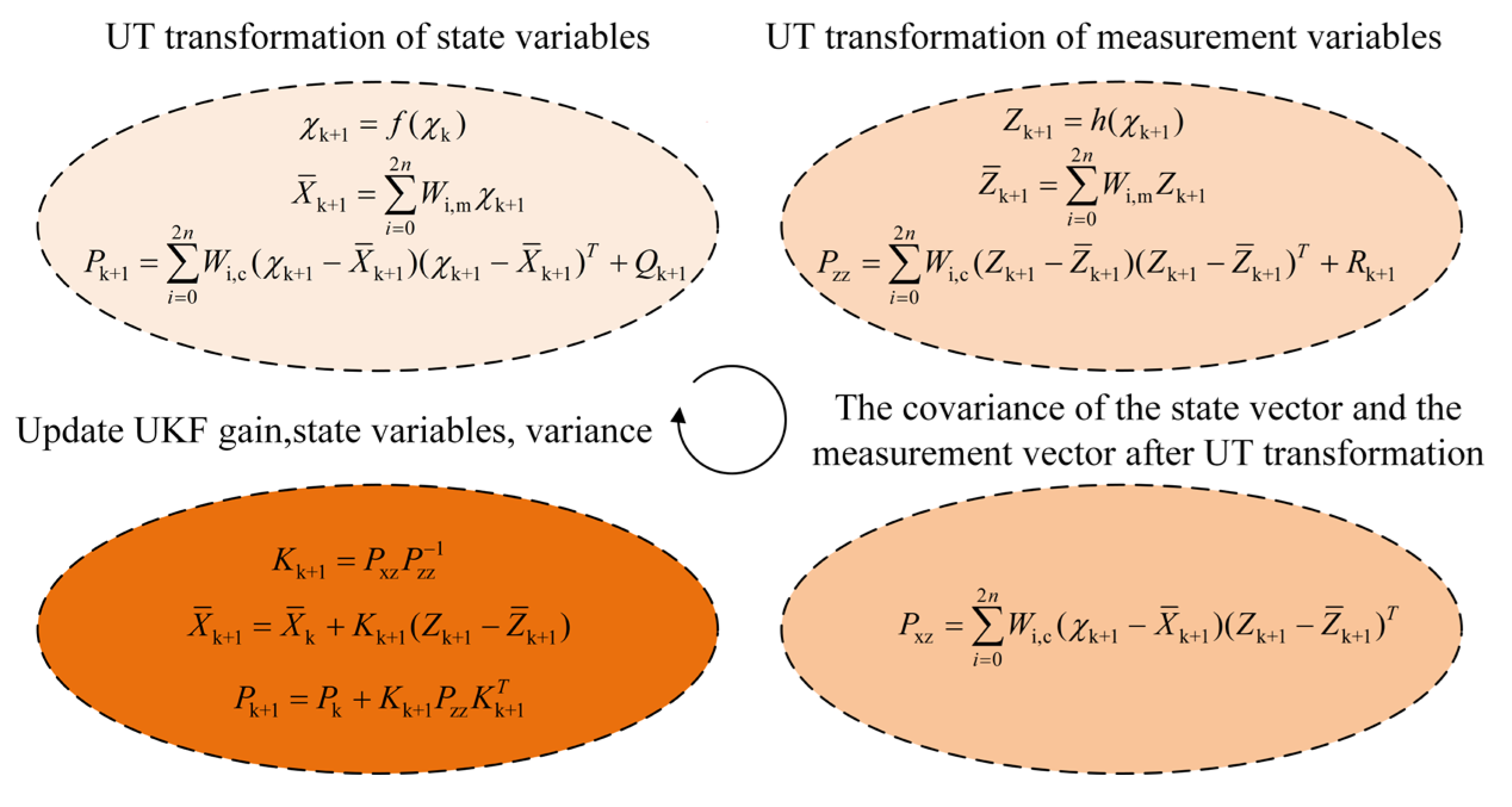
2.1. Unscented Kalman Filter
- Step 1: Define initialization state
- Step 2: Sigma Point Sampling for State Variables
- Step 3: Complete the sigma sampling point nonlinear conversion of state variables using the following equation:
- Step 4: Complete nonlinear conversion of sigma sampling points for measurement using the following equation:
- Step 5: The covariance between the state vector and the measurement vector is described as follows:
- Step 6: The UKF gain is calculated, the state vector and variance are updated by the following:
2.2. Analysis of Anti-Noise Detection Performance
3. Feature Extraction of PQDs
4. Kernel Extreme Learning Machine Method for PQDs Classification
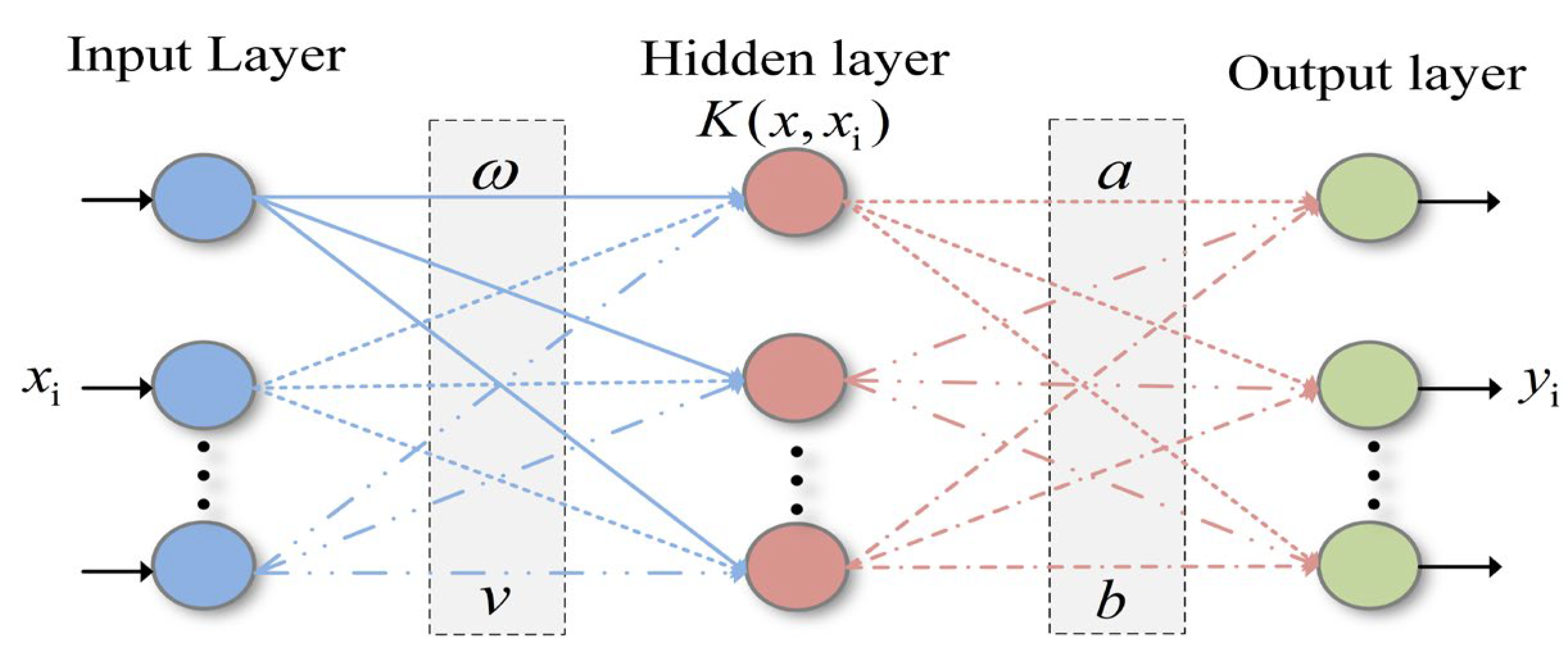
4.1. Kernel Extreme Learning Machine
4.2. Comparison of Algorithm Classification Results
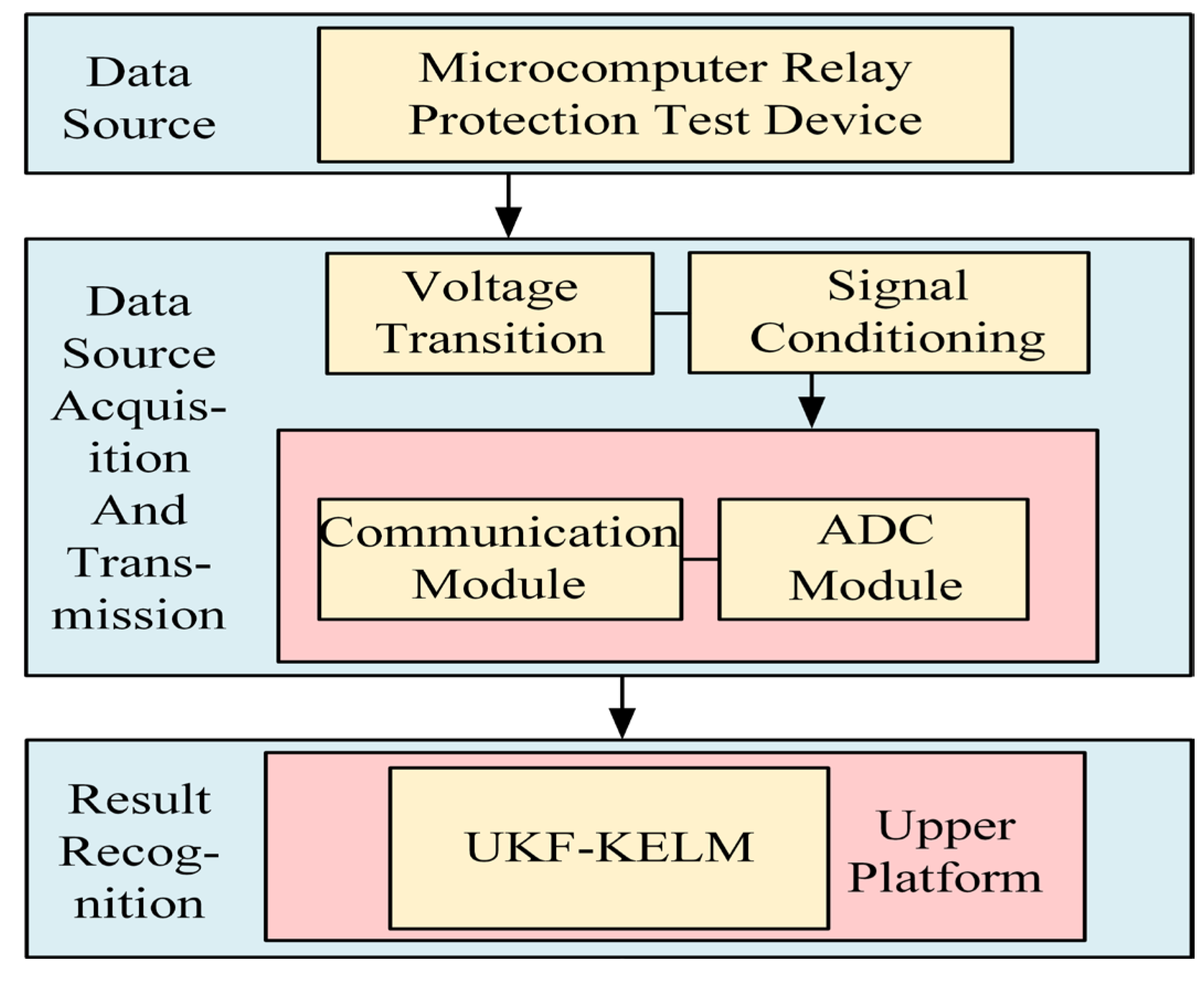
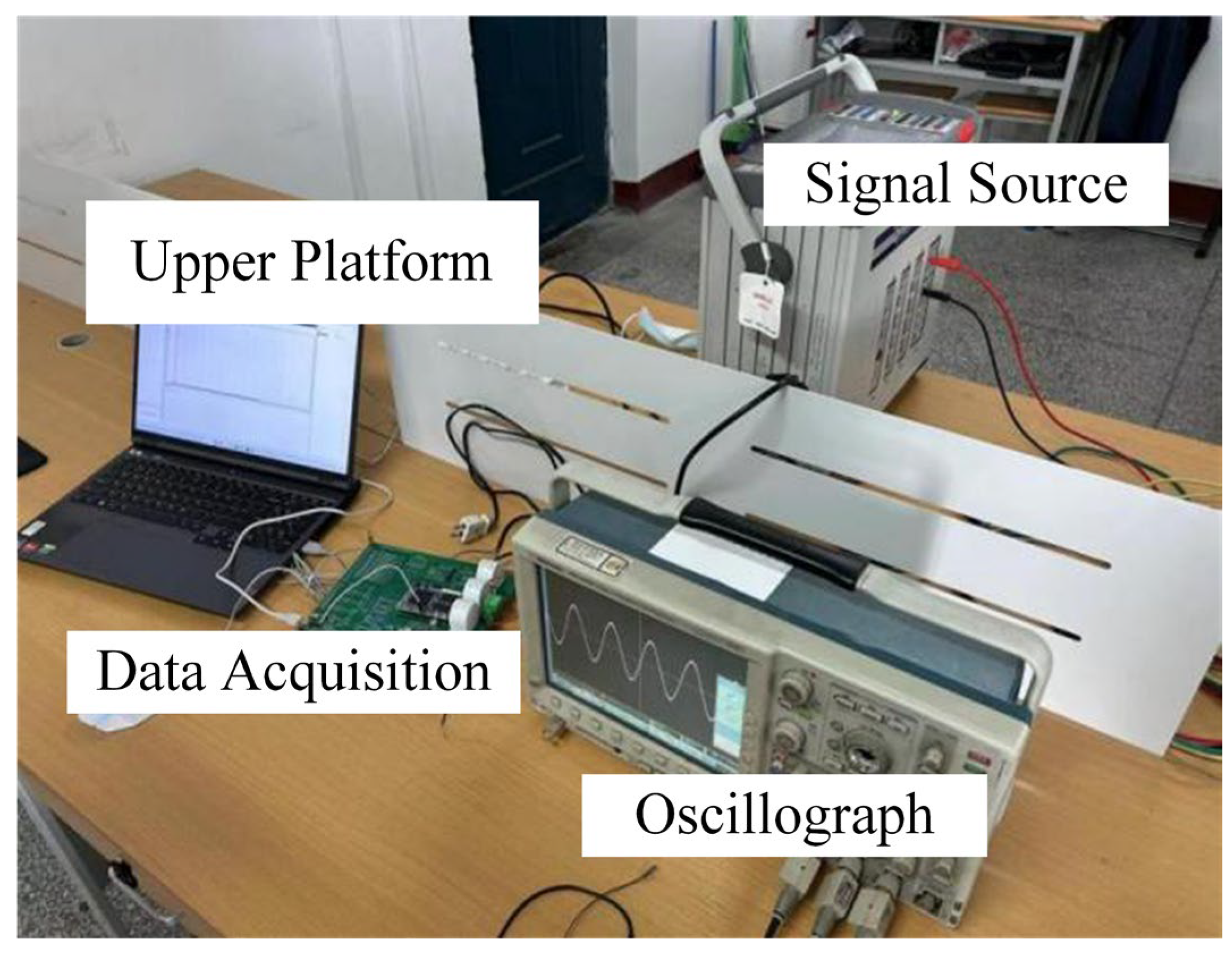
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, L.Q.; Jin, Y.; Li, H.X.; Li, Y.; Li, Y.C.; Zhang, K.J.; Liu, H.; Cheng, L. An advanced quantum support vector machine for power quality disturbance detection and identification. EPJ Quantum Technol. 2024, 11, 70. [Google Scholar] [CrossRef]
- Wang, J.; Xu, Z.; Che, Y. Power Quality Disturbance Classification Based on DWT and Multilayer Perceptron Extreme Learning Machine. Appl. Sci. 2019, 9, 2315. [Google Scholar] [CrossRef]
- Lin, W.-M.; Wu, C.-H. Fast Support Vector Machine for Power Quality Disturbance Classification. Appl. Sci. 2022, 12, 11649. [Google Scholar] [CrossRef]
- Rao, X.J.; Zhou, K.; Wang, X.J.; Li, M.Z.; Huang, Y.L.; Xie, M. Suppression of narrow-band noise of partial discharge based on improved SVD algorithm. High Volt. Eng. 2021, 47, 705–713. [Google Scholar]
- Cheng, J.; Zhang, Z.; Yan, R.; Li, X.; Xie, Z.; Hu, Z. Transient power quality disturbance localization and detection method based on SVD-ILMD. Zhejiang Electr. Power 2024, 43, 1–11. [Google Scholar]
- Huang, J.; Li, X. Detection of harmonic in power system based on short-time Fourier transform and spectral kurtosis. Power Syst. Prot. Control 2017, 45, 43–50. [Google Scholar]
- Chen, Z.; Wang, L.; Yi, Y. Computation of radio interference excitation current of DC corona based on short-time Fourier transform. High Volt. Eng. 2019, 45, 1866–1872. [Google Scholar]
- Jia, R.; Zhao, J.; Wu, H.; Ma, X.; Dang, J. Application of correlated probabilistic wavelet transform in partial discharge detection. High Volt. Eng. 2017, 43, 2896–2902. [Google Scholar]
- Khetarpal, P.; Nagpal, N.; Alhelou, H.H.; Siano, P.; Al-Numay, M. Noisy and non-stationary power quality disturbance classification based on adaptive segmentation empirical wavelet transform and support vector machine. Comput. Electr. Eng. 2024, 118, 109346. [Google Scholar] [CrossRef]
- Ke, Z.; Qingren, J.; Zhiyue, M. Power quality disturbance detection based on partitioning-improved empirical wavelet transform. J. Phys. Conf. Ser. 2023, 2659, 012023. [Google Scholar]
- Cui, Y.; Xi, Y.; Zhang, X. Detection of harmonic based on residual analysis using adaptive Kalman filter. Power Syst. Prot. Control 2019, 47, 92–100. [Google Scholar]
- Xu, H.; Guo, G.; Yu, L.; Qin, F.; Chen, J. Nonnegative definite adaptive Kalman filter based detection. Sci. Technol. Eng. 2020, 20, 3611–3616. [Google Scholar]
- Liu, Y.; Wu, Z.; Li, T.; Han, W.; Fang, M. Implementation of Power Quality Detection Technology Based on Kalman Filtering Algorithm. Autom. Instrum. 2023, 7, 294–298. [Google Scholar]
- Rodriguez, M.A.; Sotomonte, J.F.; Cifuentes, J.; Bueno-López, M. A classification method for power-quality disturbances using Hilbert–Huang transform and LSTM recurrent neural networks. J. Electr. Eng. Technol. 2021, 16, 249–266. [Google Scholar] [CrossRef]
- Wang, J.; Xu, Z.; Che, Y. Power quality disturbance classification based on compressed sensing and deep convolution neural networks. IEEE Access 2019, 7, 78336–78346. [Google Scholar] [CrossRef]
- Cai, K.; Hu, T.; Cao, W.; Li, G. Classifying power quality disturbances based on phase space reconstruction and a convolutional neural network. Appl. Sci. 2019, 9, 3681. [Google Scholar] [CrossRef]
- Qu, H.; Liu, H.; Li, X.; Huang, J. Recognition of multiple power quality disturbances using multi-label random forest. Power Syst. Prot. Control. 2017, 45, 1–7. [Google Scholar]
- Chen, H.; Yu, Z. Overview of power quality analysis. China Insp. Body Lab. 2022, 30, 11–14. [Google Scholar]
- Samanta, S.I.; Mohanty, S.; Parida, M.S.; Rout, P.K.; Panda, S.; Bajaj, M.; Blazek, V.; Prokop, L.; Misak, S. Artificial intelligence and machine learning techniques for power quality event classification: A focused review and future insights. Results Eng. 2025, 25, 103873. [Google Scholar] [CrossRef]
- Indragandhi, V.; Kumar, S.R.; Saranya, R. Hilbert-Huang Transform and machine learning based electromechanical analysis of induction machine under power quality disturbances. Results Eng. 2024, 24, 103075. [Google Scholar] [CrossRef]
- He, H.; Xin, Z.; Wang, L.; Tan, F.; Kong, C. Detection method of power quality disturbance based on feature vector selection and double-layer BPNN. High Volt. Eng. 2022, 48, 1237–1250. [Google Scholar]
- Cheng, X.; Wang, A.; Hua, R.; Meng, G. Research on the performance of 24 feature indicators for bearing state recognition. J. Vib. Meas. Diagn. 2016, 36, 351–358. [Google Scholar]
- Li, C.; Xu, M. Concept, properties, and construction methods of kernel functions. Comput. Knowl. Technol. 2015, 11, 171–173. [Google Scholar]
- Wu, S.; Jiang, J.; Yan, Y.; Bao, W. Short-term load forecasting based on VMD-PSO-MKELM method. Proc. Chin. Soc. Univ. Electr. Autom. Electr. Power Syst. 2022, 34, 18–25. [Google Scholar]
- Yi, H.; Gao, Y.; Zhu, Y.; Huang, R.; Huang, C. Recognition of composite power quality disturbance based on improved incomplete S transform and LOO-KELM algorithm. Electr. Power Autom. Equip. 2022, 42, 199–205. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | SNR | ||
|---|---|---|---|
| KF | 15 | 0.0206 | 0.0809 |
| 25 | 0.0100 | 0.0404 | |
| 35 | 0.0087 | 0.0280 | |
| UKF | 15 | 0.0149 | 0.0765 |
| 25 | 0.0092 | 0.0387 | |
| 35 | 0.0085 | 0.0274 |
| Label | Events | Mathematical Equations | Parameters Limits |
|---|---|---|---|
| C1 | Swell | ||
| C2 | Sag | ||
| C3 | Interruption | ||
| C4 | Fluctuations | ||
| C5 | Pulse | ||
| C6 | Oscillatory | ||
| C7 | Harmonics | ||
| C8 | Harmonics + Swell | ||
| C9 | Harmonics + Sag | ||
| C10 | Oscillatory + Sag | ||
| C11 | Oscillatory + Interruption | ||
| C12 | Harmonics + Oscillatory | ||
| C13 | Harmonic + Swell + Fluctuations | ||
| C14 | Harmonic + Oscillatory + Sag |
| Eigenvalue | Swell | Sag | Interruption | Fluctuations | Pulse | Harmonics | Oscillatory |
|---|---|---|---|---|---|---|---|
| Maximum Value | √ | — | — | √ | √ | — | — |
| Minimum Value | √ | — | √ | √ | — | — | — |
| Coefficient of Variation | — | √ | √ | √ | — | √ | — |
| Waveform Index | √ | √ | √ | — | — | — | — |
| Peak Index | — | √ | √ | — | √ | √ | √ |
| Margin Index | — | — | √ | — | √ | √ | √ |
| Root MeanSquare Amplitude | √ | √ | √ | — | — | — | — |
| Label | Success Rate of Different Methods | |||
|---|---|---|---|---|
| KF-ELM | KF-KELM | UFK-ELM | UKF-KELM | |
| C1 | 97 | 95 | 96 | 95 |
| C2 | 95 | 96 | 94 | 98 |
| C3 | 96 | 99 | 100 | 100 |
| C4 | 98 | 97 | 99 | 96 |
| C5 | 100 | 98 | 96 | 98 |
| C6 | 95 | 100 | 100 | 100 |
| C7 | 98 | 100 | 98 | 100 |
| C8 | 100 | 99 | 96 | 99 |
| C9 | 95 | 98 | 100 | 98 |
| C10 | 97 | 100 | 97 | 96 |
| C11 | 98 | 97 | 96 | 98 |
| C12 | 100 | 96 | 100 | 100 |
| C13 | 99 | 98 | 96 | 97 |
| C14 | 97 | 100 | 100 | 99 |
| Average rate | 97.5 | 98.07 | 97.71 | 98.14 |
| UKF-ELM | UKF-KELM | |
|---|---|---|
| Training time/s | 0.0015 | 0.0026 |
| Test time/s | 0.0018 | 0.0401 |
| Experiment Equipment | Number | Equipment Type |
|---|---|---|
| Upper Platform | 1 | Matlab2020 |
| Data Acquisition | 1 | STM32H743IIT6 |
| Oscillograph | 1 | - |
| Microcomputer relay protection test device | 1 | ONLLY-AD461 |
| Label | UKF-KELM/% |
|---|---|
| C1 | 97 |
| C2 | 98 |
| C5 | 97 |
| C7 | 100 |
| C1 + C7 | 96 |
| C2 + C7 | 100 |
| C5 + C7 | 98 |
| Average rate | 98.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Y.; Cao, H.; Wang, L.; Wei, J.; Zhu, Y.; He, H. Power Quality Disturbance Classification Method Based on Unscented Kalman Filter and Kernel Extreme Learning Machine. Appl. Sci. 2025, 15, 2721. https://doi.org/10.3390/app15052721
Jiao Y, Cao H, Wang L, Wei J, Zhu Y, He H. Power Quality Disturbance Classification Method Based on Unscented Kalman Filter and Kernel Extreme Learning Machine. Applied Sciences. 2025; 15(5):2721. https://doi.org/10.3390/app15052721
Chicago/Turabian StyleJiao, Yanjun, Haoyu Cao, Linke Wang, Jiahui Wei, Yansong Zhu, and Hucheng He. 2025. "Power Quality Disturbance Classification Method Based on Unscented Kalman Filter and Kernel Extreme Learning Machine" Applied Sciences 15, no. 5: 2721. https://doi.org/10.3390/app15052721
APA StyleJiao, Y., Cao, H., Wang, L., Wei, J., Zhu, Y., & He, H. (2025). Power Quality Disturbance Classification Method Based on Unscented Kalman Filter and Kernel Extreme Learning Machine. Applied Sciences, 15(5), 2721. https://doi.org/10.3390/app15052721