
UAV-BS Site Planning Based on Circular Coverage Strategy


Abstract
1. Introduction
2. Background and Related Work
2.1. UAV Air Subscriber
2.2. UAV Wireless Relay
2.3. UAV Aerial Base Station
2.3.1. Research on UAV-BS Flight Path Planning
2.3.2. Research on UAV-BS Autonomous Control
2.3.3. Research on UAV-BS Network Topology
3. Theory
3.1. Basic Concepts
3.2. Optimization Problem
3.3. Optimality Conditions
- The inequality constraints of the original problem must be satisfied: .
- The equality constraints of the original problem must be satisfied: ,.
- The Lagrange multipliers must be non-negative: .
- KKT Conditions: , meaning that the corresponding Lagrange multipliers are non-zero only when the constraints are active.
3.4. Optimization Algorithms
4. Methodology
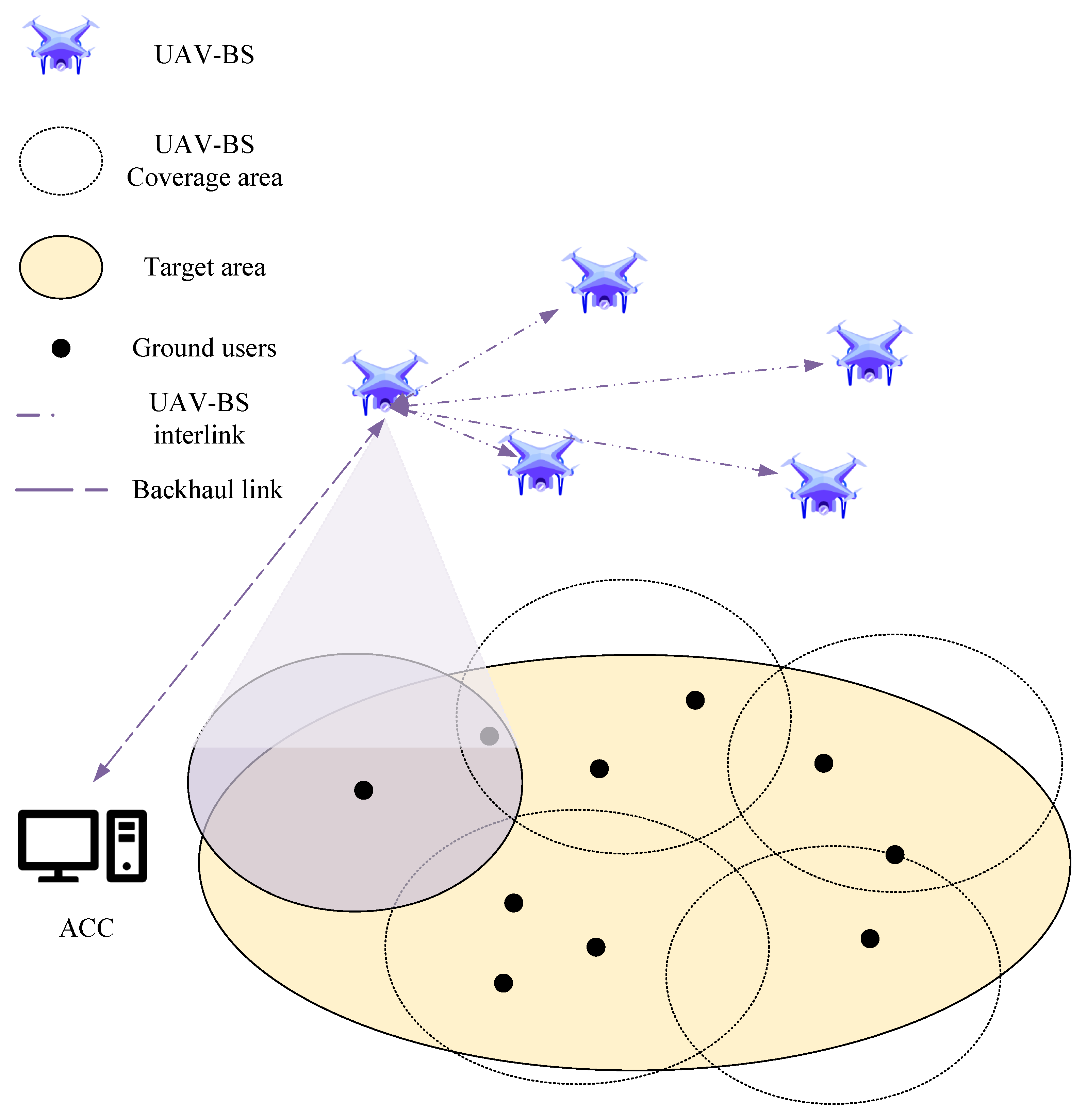
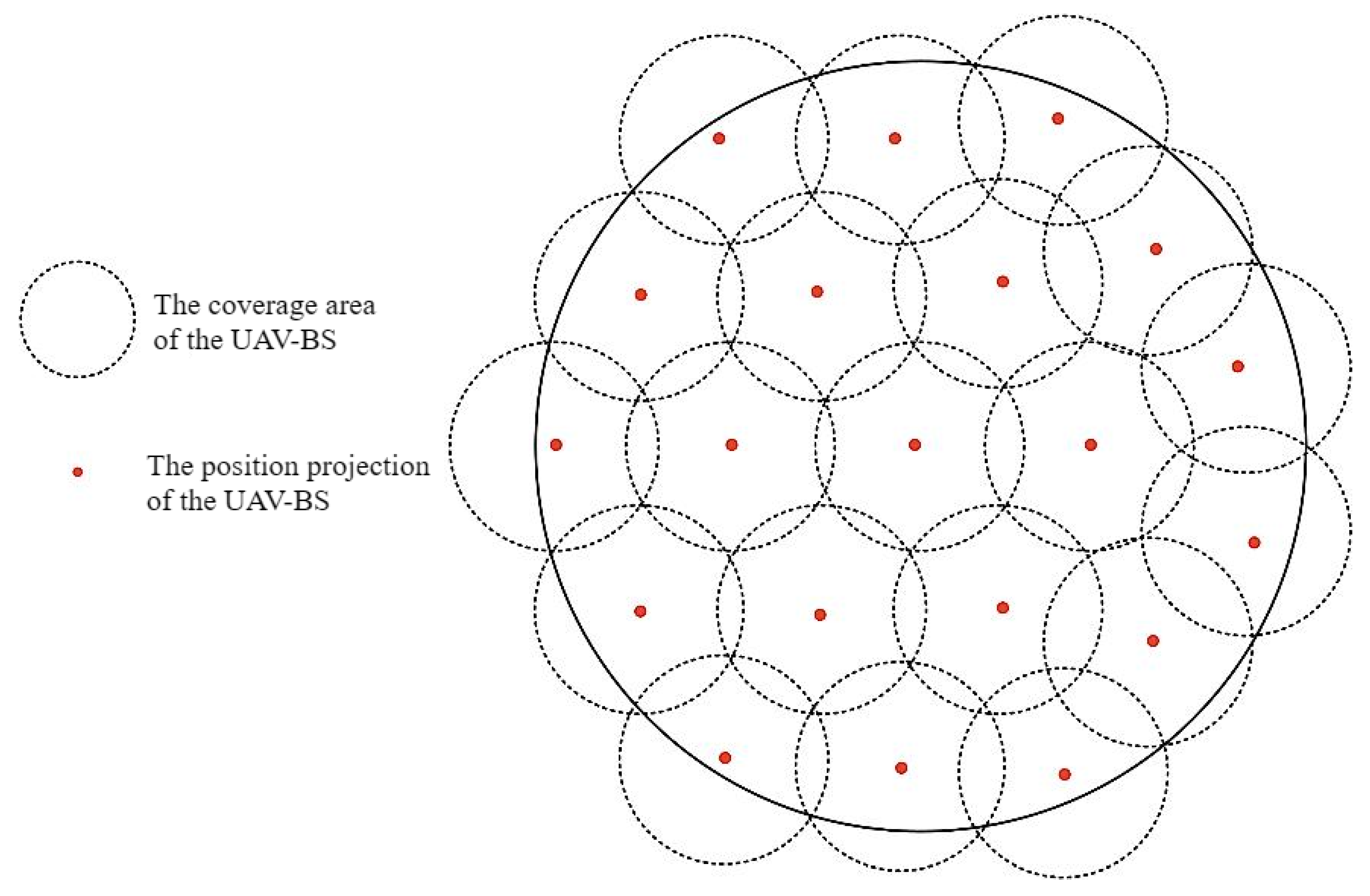
4.1. UAV-BS Full Coverage Network Model
4.2. Air-to-Ground Channel Model
4.3. UAV-BS Full Coverage Network Energy Consumption Model
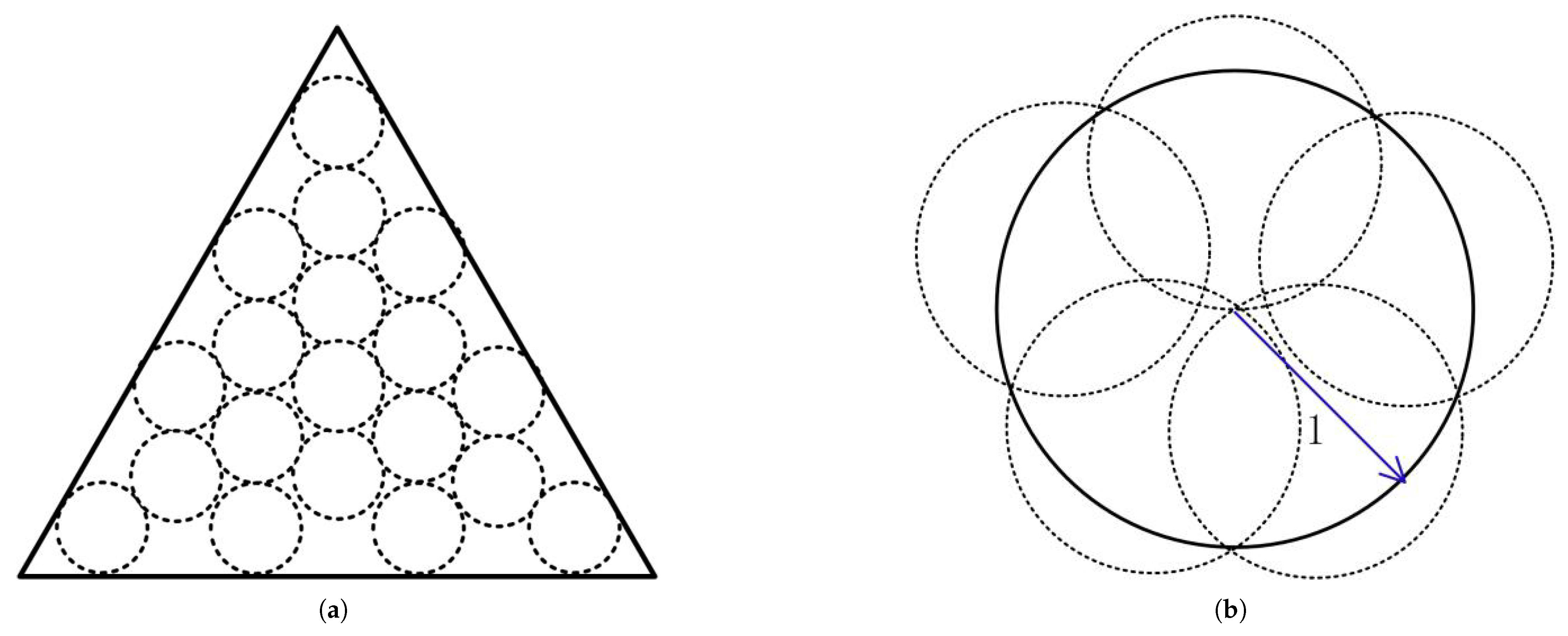
4.4. Circle Coverage Power Optimization Strategy
| Algorithm 1: Circular Coverage Power Optimization Strategy |
|
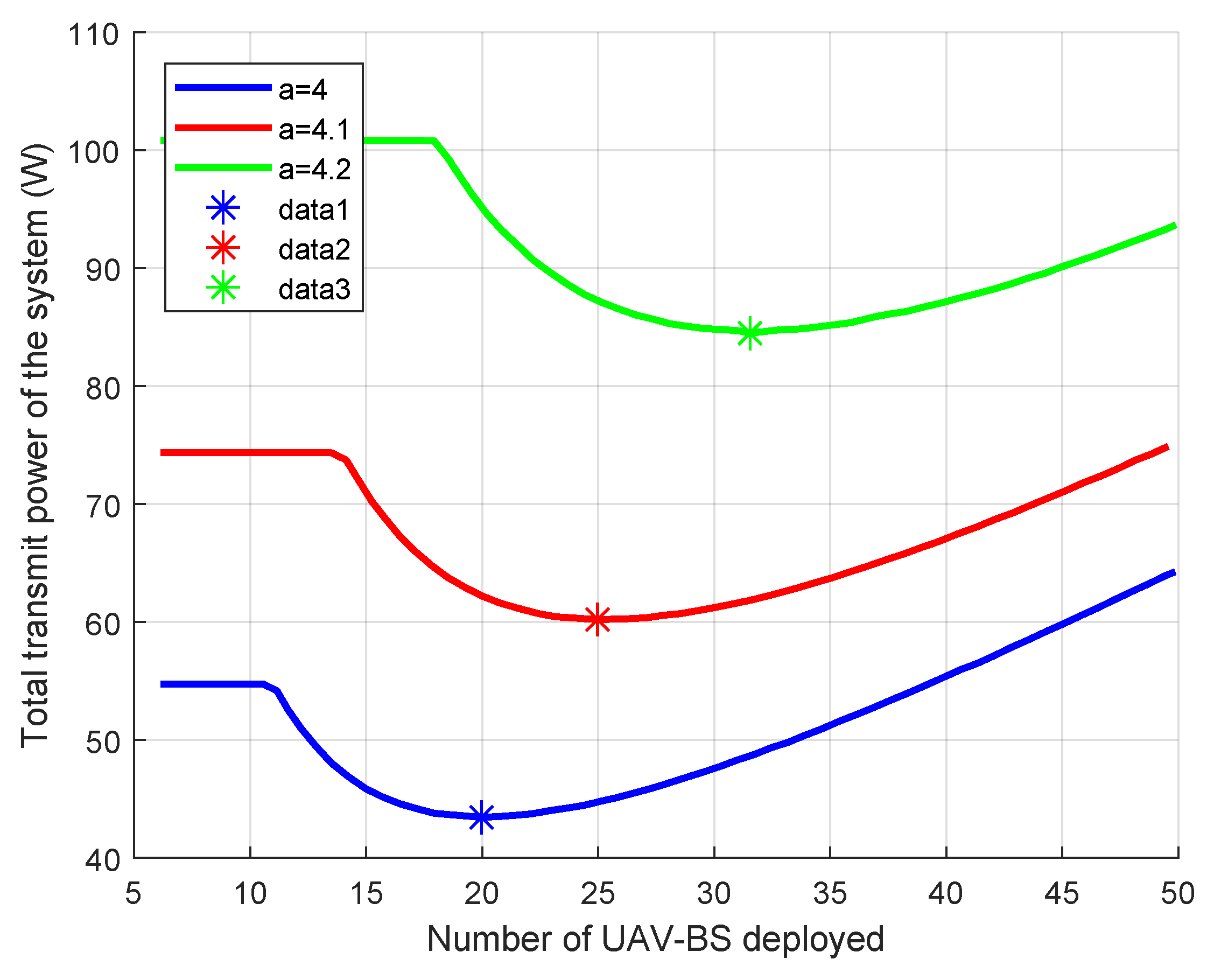
5. Experimental Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bajracharya, R.; Shrestha, R.; Kim, S.; Jung, H. 6G NR-U based wireless infrastructure UAV: Standardization, opportunities, challenges and future scopes. IEEE Access 2022, 10, 30536–30555. [Google Scholar] [CrossRef]
- Yastrebova, A.; Kirichek, R.; Koucheryavy, Y.; Borodin, A.; Koucheryavy, A. Future networks 2030: Architecture & requirements. In Proceedings of the 2018 10th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Moscow, Russia, 5–9 November 2018; pp. 1–8. [Google Scholar]
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G networks: Use cases and technologies. IEEE Commun. Mag. 2020, 58, 55–61. [Google Scholar] [CrossRef]
- Ray, P.P. A review on 6G for space-air-ground integrated network: Key enablers, open challenges, and future direction. J. King Saud-Univ.-Comput. Inf. Sci. 2022, 34, 6949–6976. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Ding, G.; Chen, J.; Gao, F.; Han, Z. Completion time minimization with path planning for fixed-wing UAV communications. IEEE Trans. Wirel. Commun. 2019, 18, 3485–3499. [Google Scholar] [CrossRef]
- Alsuhli, G.; Fahim, A.; Gadallah, Y. A survey on the role of UAVs in the communication process: A technological perspective. Comput. Commun. 2022, 194, 86–123. [Google Scholar] [CrossRef]
- Jiang, Y.; Ma, Y.; Liu, J.; Hu, L.; Chen, M.; Humar, I. MER-WearNet: Medical-emergency response wearable networking powered by UAV-assisted computing offloading and WPT. IEEE Trans. Netw. Sci. Eng. 2021, 9, 299–309. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Jiang, D. Application of unmanned aerial vehicles in logistics: A literature review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Cheng, N.; Wu, S.; Wang, X.; Yin, Z.; Li, C.; Chen, W.; Chen, F. AI for UAV-assisted IoT applications: A comprehensive review. IEEE Internet Things J. 2023, 10, 14438–14461. [Google Scholar] [CrossRef]
- Rachmawati, T.S.N.; Kim, S. Unmanned Aerial Vehicles (UAV) integration with digital technologies toward construction 4.0: A systematic literature review. Sustainability 2022, 14, 5708. [Google Scholar] [CrossRef]
- Bertacchi, A. UAVs technology as a complementary tool in post-fire vegetation recovery surveys in Mediterranean fire-prone forests. Forests 2022, 13, 1009. [Google Scholar] [CrossRef]
- Naveed, M.; Baig, S.A. UAVs as Relays, opportunities and challenges. In Proceedings of the 2022 Third International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 16–17 November 2022; pp. 1–7. [Google Scholar]
- Jin, H.; Han, C.Z.; Fu, Y.; Yang, H. A Low-Profile Dual-Band Directional Antenna for Unmanned Aerial Vehicle Applications. Int. J. Antennas Propag. 2022, 2022, 4765008. [Google Scholar] [CrossRef]
- Maeng, S.J.; Yapıcı, Y.; Güvenç, İ.; Bhuyan, A.; Dai, H. Precoder design for physical-layer security and authentication in massive MIMO UAV communications. IEEE Trans. Veh. Technol. 2022, 71, 2949–2964. [Google Scholar] [CrossRef]
- Johannsen, N.L.; Almasri, S.A.; Hoeher, P.A. Geometry-based UAV MIMO channel modeling and pattern optimization for multimode antennas. IEEE Trans. Antennas Propag. 2022, 70, 11024–11032. [Google Scholar] [CrossRef]
- Xiao, Z.; Zhu, L.; Liu, Y.; Yi, P.; Zhang, R.; Xia, X.G.; Schober, R. A survey on millimeter-wave beamforming enabled UAV communications and networking. IEEE Commun. Surv. Tutor. 2021, 24, 557–610. [Google Scholar] [CrossRef]
- Zeng, F.; Hu, Z.; Xiao, Z.; Jiang, H.; Zhou, S.; Liu, W.; Liu, D. Resource allocation and trajectory optimization for QoE provisioning in energy-efficient UAV-enabled wireless networks. IEEE Trans. Veh. Technol. 2020, 69, 7634–7647. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint task offloading and resource allocation in UAV-enabled mobile edge computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Nguyen, K.K.; Duong, T.Q.; Do-Duy, T.; Claussen, H.; Hanzo, L. 3D UAV trajectory and data collection optimisation via deep reinforcement learning. IEEE Trans. Commun. 2022, 70, 2358–2371. [Google Scholar] [CrossRef]
- Guo, Y.; You, C.; Yin, C.; Zhang, R. UAV trajectory and communication co-design: Flexible path discretization and path compression. IEEE J. Sel. Areas Commun. 2021, 39, 3506–3523. [Google Scholar] [CrossRef]
- Dou, L.; Cai, S.; Zhang, X.; Su, X.; Zhang, R. Event-triggered-based adaptive dynamic programming for distributed formation control of multi-UAV. J. Frankl. Inst. 2022, 359, 3671–3691. [Google Scholar] [CrossRef]
- Sergeev, A.; Filimonov, A.; Filimonov, N. Algorithmization of Autonomous Landing of Unmanned Aerial Vehicles by “Flexible” Kinematic Trajectories. In Proceedings of the International Conference on High-Performance Computing Systems and Technologies in Scientific Research, Automation of Control and Production, Barnaul, Russia, 15–16 May 2020; pp. 181–200. [Google Scholar]
- Zhang, Y.; Chen, Z.; Sun, M.; Zhang, X. Trajectory tracking control of a quadrotor UAV based on sliding mode active disturbance rejection control. Nonlinear Anal. Model. Control 2019, 24, 545–560. [Google Scholar] [CrossRef]
- Hu, H.; Chen, Y.; Peng, B.; Li, Z.; Wu, Q.; Lin, Z.; Wang, X. Cooperative positioning of UAV internet of things based on optimization algorithm. Wirel. Netw. 2024, 30, 4495–4505. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A review of unmanned aerial vehicle low-altitude remote sensing (UAV-LARS) use in agricultural monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Kershner, R. The number of circles covering a set. Am. J. Math. 1939, 61, 665–671. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Role in UAVCN | Effect | Application Scenario | Research Progress |
|---|---|---|---|
| Air subscriber | Directly connected to the ground network to communicate with other users and accessible worldwide; operators can remotely direct UAV behavior, thereby reducing human resource investment and improving network efficiency. | Emergency communications, agricultural environmental protection, logistics, urban security, construction engineering, military reconnaissance | [9,10,11,12] |
| Wireless relay | The UAV acts as an intermediate node to transmit communication signals from the sender to the receiver to expand the range and improve the quality of communication. | Emergency communications, battlefield communications, traffic monitoring, large public events, urban peak hours, crowded places | [13] |
| Aerial base station | It undertakes the communication function of the space-based network layer and provides communication services to ground users and air users. Interconnection with satellite constellations and sea-based networks to achieve global coverage is an important link in the future network. | Emergency communication, earthquake mitigation, field exploration, Marine QoS guarantee, logistics distribution, ground network supplement | [14,15,16,17,18,19,20,21,22,23,24,25] |
| Number of Small Circles (n) | Radius of Small Circle () | Number of Small Circles (n) | Radius of Small Circle () |
|---|---|---|---|
| 1 | 0.3318 | ||
| 0.3182 | |||
| 0.3083 | |||
| 0.61 | 0.2986 | ||
| 0.556 | 0.2902 | ||
| 0.5 | 0.2774 | ||
| 0.437 | 0.2709 | ||
| 0.422 | 0.2629 | ||
| 0.398 | 0.2533 | ||
| 0.38 | 0.2500 | ||
| 0.361 | 0.2453 | ||
| 0.3467 | 0.2392 |
| Parameter | Value |
|---|---|
| Target area radius R | 1000 m |
| UAV-BS deployment height H | 100 m |
| Number of UAVs in control center N | 50 |
| Noise spectral density | −174 dBm/Hz |
| A2G channel attenuation exponent | 2 |
| Maximum transmission power of single UAV-BS | 5 W |
| Reception SNR threshold | 5 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Tang, Z.; Liu, X.; Shen, Y.; Zheng, Y. UAV-BS Site Planning Based on Circular Coverage Strategy. Appl. Sci. 2025, 15, 1971. https://doi.org/10.3390/app15041971
Zhang J, Tang Z, Liu X, Shen Y, Zheng Y. UAV-BS Site Planning Based on Circular Coverage Strategy. Applied Sciences. 2025; 15(4):1971. https://doi.org/10.3390/app15041971
Chicago/Turabian StyleZhang, Jingshuai, Zhaoxiao Tang, Xinyi Liu, Yujie Shen, and Yongxing Zheng. 2025. "UAV-BS Site Planning Based on Circular Coverage Strategy" Applied Sciences 15, no. 4: 1971. https://doi.org/10.3390/app15041971
APA StyleZhang, J., Tang, Z., Liu, X., Shen, Y., & Zheng, Y. (2025). UAV-BS Site Planning Based on Circular Coverage Strategy. Applied Sciences, 15(4), 1971. https://doi.org/10.3390/app15041971