



Advancing Fault Detection in Distribution Networks with a Real-Time Approach Using Robust RVFLN



Abstract
1. Introduction
- 1
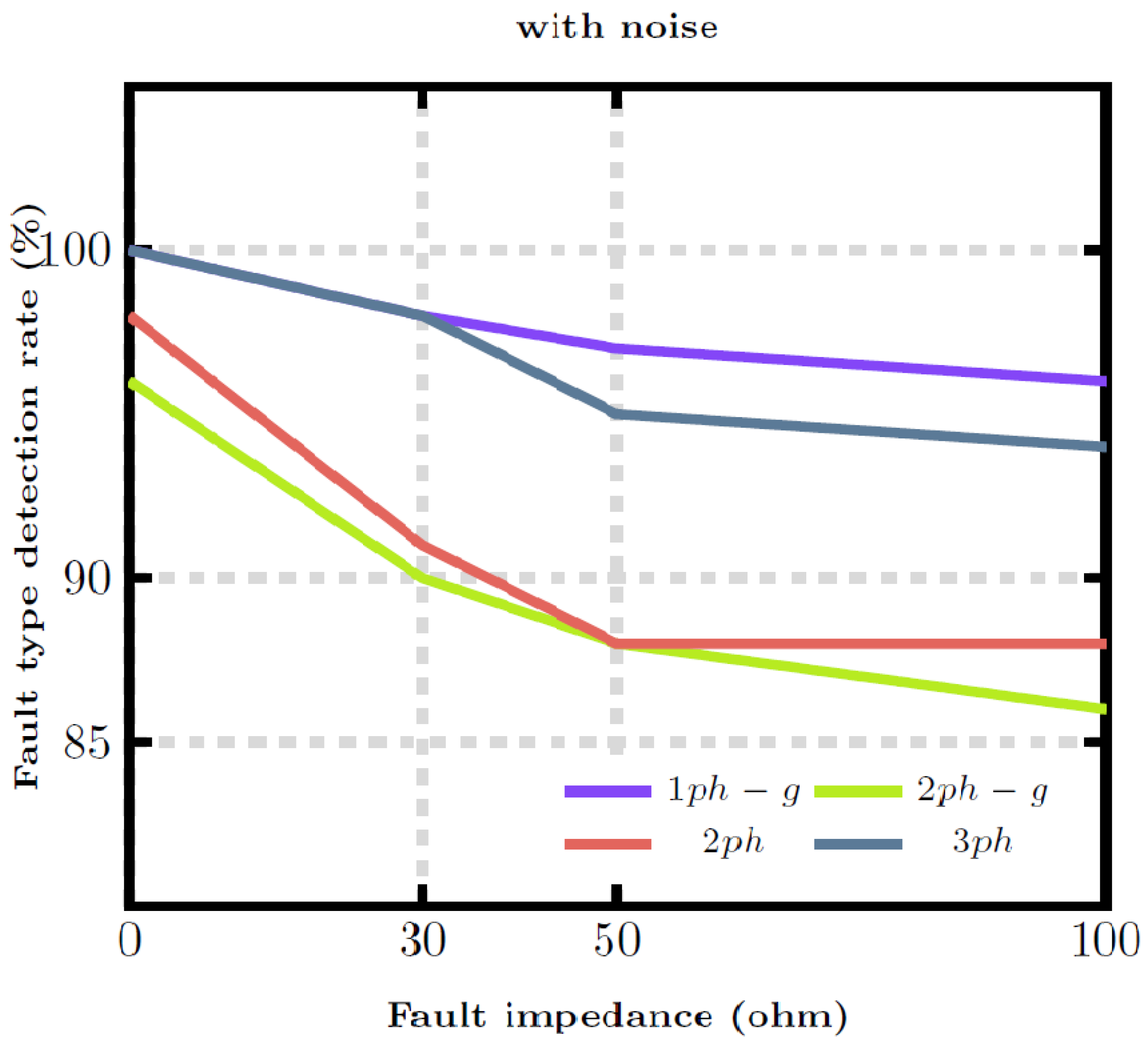
- When noise from sensors is not taken into account in real-time operations, various problems occur in both signal processing and machine learning applications. The main problems are misclassification and low accuracy. However, in this study, noise and outlier effects are taken into account for fault detection.
- 2
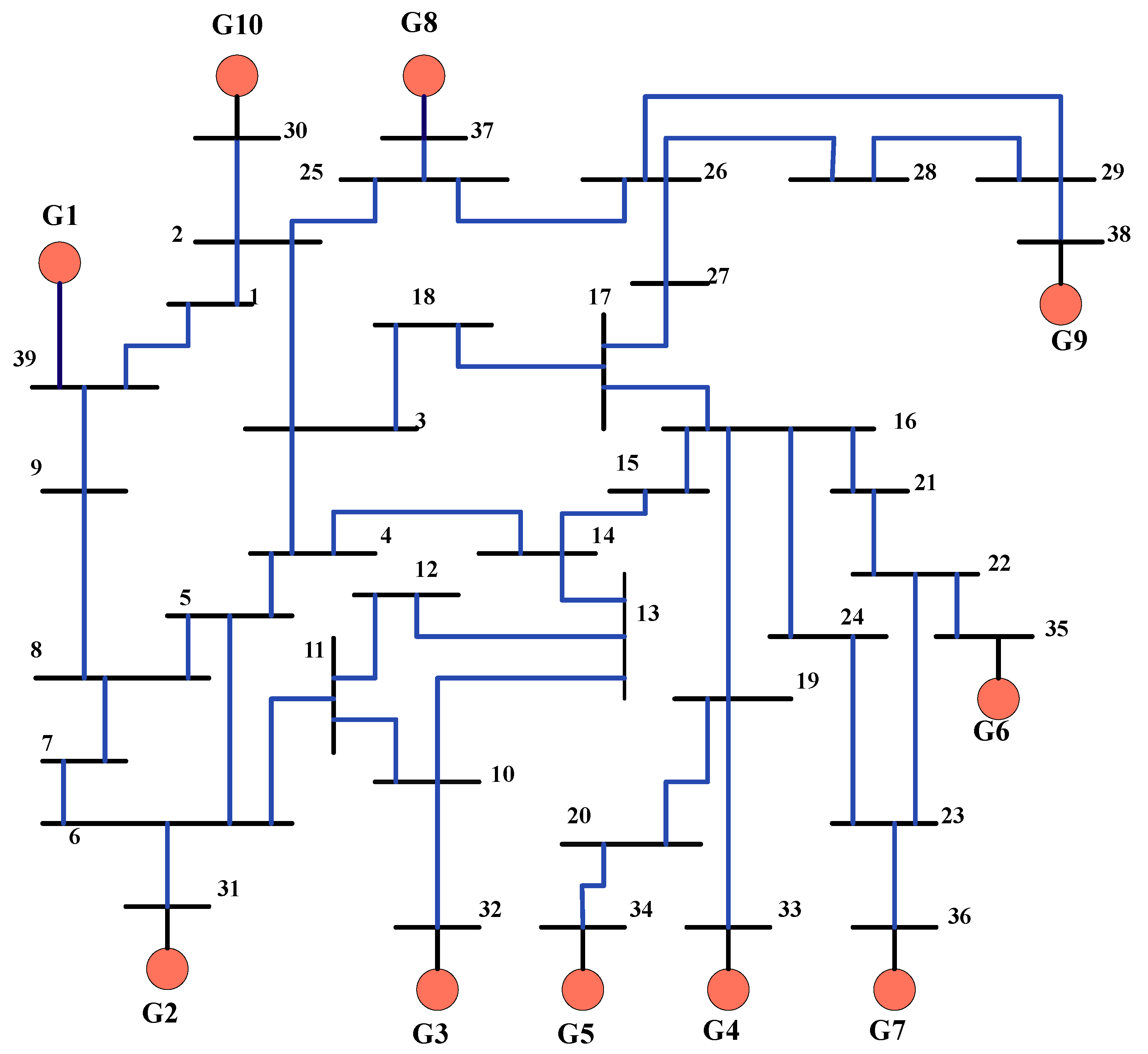
- When the studies in the research are examined, Matlab is generally used for the realization of fault type and location detection in single-bus transmission systems. However, the work done in Matlab needs to be compared with real-time systems. In this study, the IEEE 39-bus system, which is a small model of a distribution network, is realized using the RTDS simulator and a real-time study is performed.
- 3
- When refs. [18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40] are analyzed, it is found that six new attribute vectors that were not previously used in fault type data detection in distribution networks have been created. Thanks to these feature vectors, the accuracy of fault type and location detection in high-impedance short-circuit faults is improved by 10%.
- 4
2. Fault Detection Method
2.1. Feature Construction
2.1.1. Fundamental Electrical Features (U1–U4)
- U1—Represents the absolute magnitude of the current waveform in each phase. Changes in this value can indicate the presence of a fault.
- U2—Represents the absolute magnitude of the voltage waveform in each phase. A significant drop in voltage is often a sign of a fault.
- U3—The phase angle of the current relative to a reference point, providing insights into power flow and fault-induced distortions.
- U4—The phase angle of the voltage, which can shift significantly during a fault event, particularly in unbalanced conditions.
2.1.2. Derivative-Based Features (U5–U8)
- U5—Measures the rate of change in the current, highlighting rapid variations indicative of fault inception.
- U6—Captures sudden voltage drops or fluctuations caused by fault conditions.
- U7—Provides insights into frequency variations and phase shifts due to faults.
- U8—Tracks dynamic phase shifts in voltage waveforms, particularly useful in detecting unbalanced faults.
2.1.3. Norm-Based Statistical Features (U9–U14)
- U9—Represents the sum of the absolute values of voltage samples over a defined window, effectively capturing the total signal intensity.
- U10—Reflects the root mean square (RMS) value of the voltage signal, emphasizing the dominant frequency components.
- U11—Extracts the maximum absolute value in the voltage signal, highlighting peak disturbances.
- U12—Represents the sum of the absolute values of current samples, useful in quantifying the total current deviation.
- U13—Provides an RMS-like measurement for the current, emphasizing significant fluctuations.
- U114—Extracts the maximum absolute value in the current signal, useful in detecting extreme deviations due to faults.
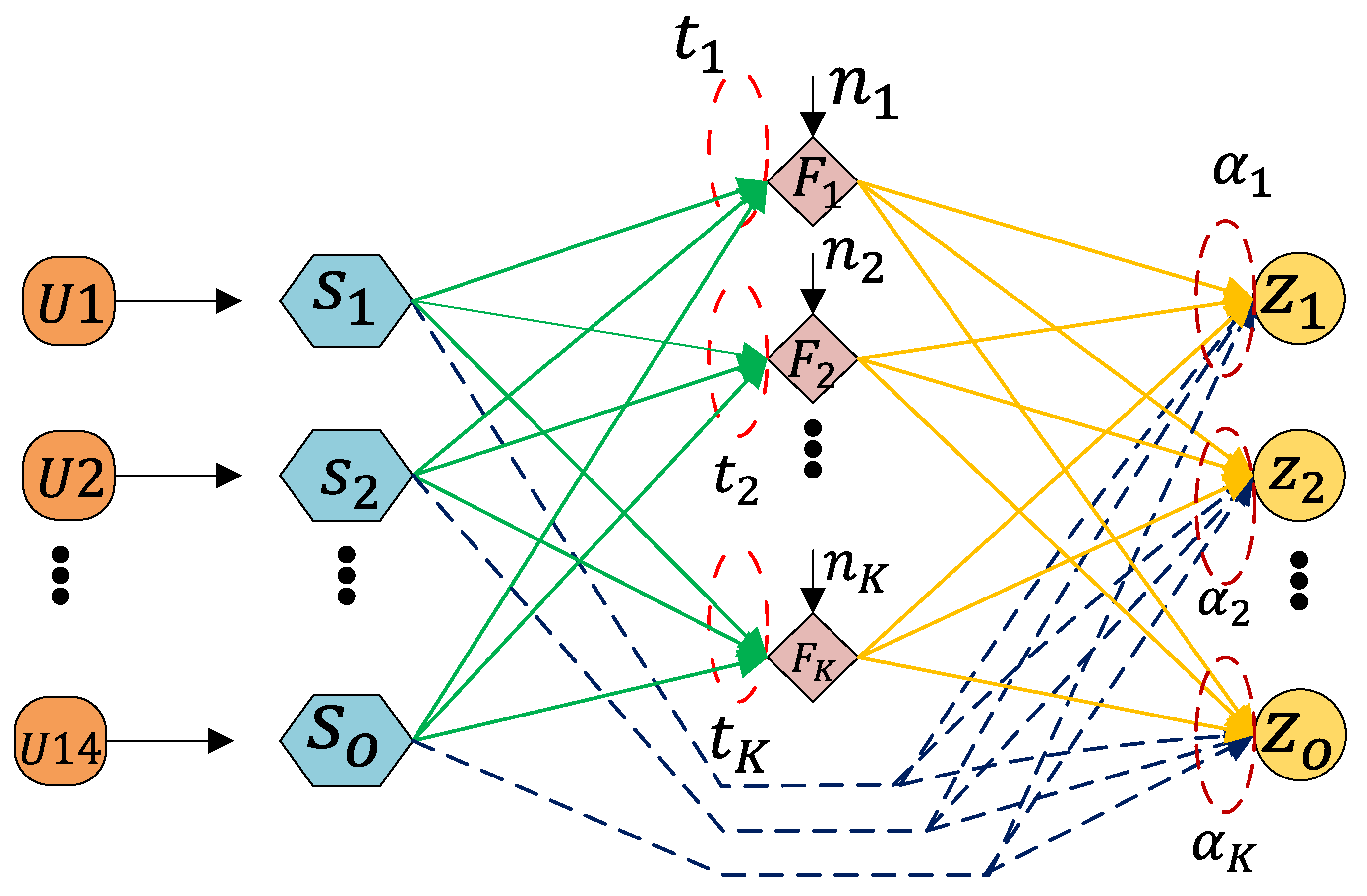
2.2. RVFLN Algorithm
2.3. R-RVFLN
2.4. RR-RVFLN
2.5. ORR-RVFLN
2.5.1.
2.5.2.
3. Case Study
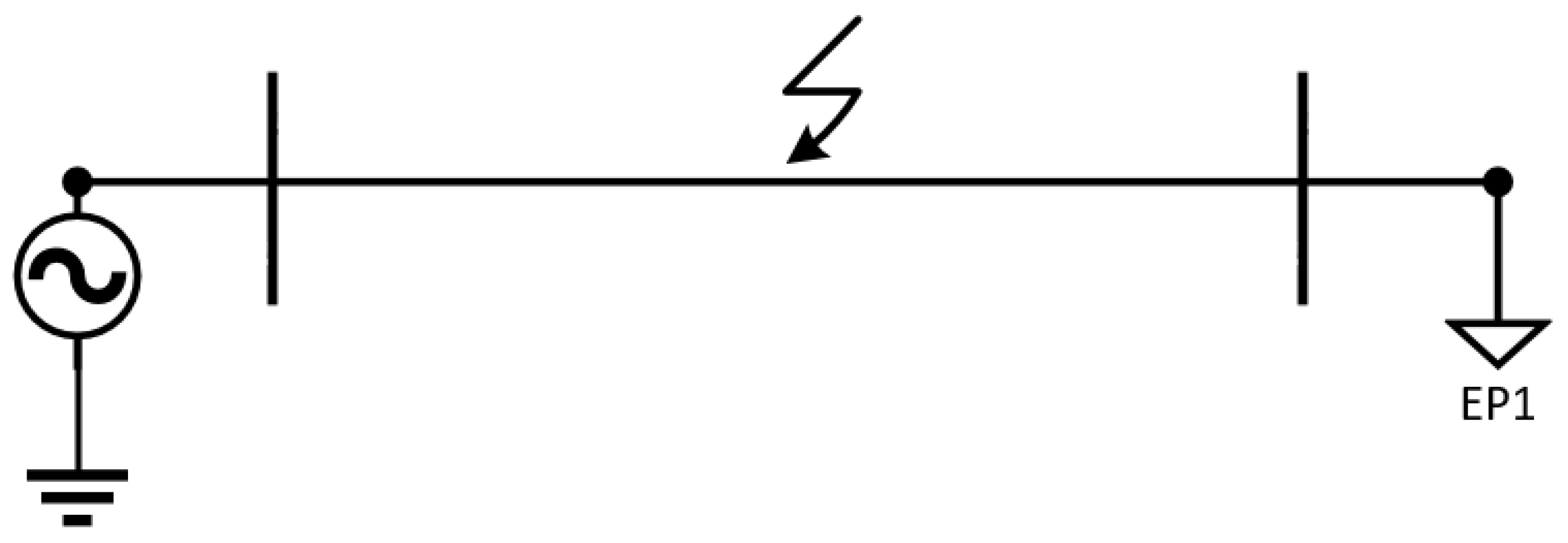
3.1. Single-Bus Transmission System
3.2. IEEE 39-Busbar System
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jordehi, A.R. Optimisation of electric distribution systems: A review. Renew. Sustain. Energy Rev. 2015, 51, 1088–1100. [Google Scholar] [CrossRef]
- Rezapour, H.; Jamali, S.; Siano, P. Wide-Area Protection System for Radial Smart Distribution Networks. Appl. Sci. 2024, 14, 4862. [Google Scholar] [CrossRef]
- Silos-Sanchez, A.; Villafafila-Robles, R.; Lloret-Gallego, P. Novel fault location algorithm for meshed distribution networks with DERs. Electr. Power Syst. Res. 2020, 181, 106182. [Google Scholar] [CrossRef]
- Nsaif, Y.M.; Lipu, M.H.; Ayob, A.; Yusof, Y.; Hussain, A. Fault detection and protection schemes for distributed generation integrated to distribution network: Challenges and suggestions. IEEE Access 2021, 9, 142693–142717. [Google Scholar] [CrossRef]
- Zeng, Y.; Jiang, S.; Konstantinou, G.; Pou, J.; Zou, G.; Zhang, X. Multi-Objective Controller Design for Grid-Following Converters with Easy Transfer Reinforcement Learning. IEEE Trans. Power Electron. 2025, in press. [Google Scholar] [CrossRef]
- Zeng, Y.; Xiao, Z.; Liu, Q.; Liang, G.; Rodriguez, E.; Zou, G.; Zhang, X.; Pou, J. Physics-informed deep transfer reinforcement learning method for the input-series output-parallel dual active bridge-based auxiliary power modules in electrical aircraft. IEEE Trans. Transp. Electrif. 2024, in press. [Google Scholar] [CrossRef]
- Haydaroğlu, C.; Yıldırım, B.; Kılıç, H.; Özdemir, M.T. The Effect of Local and Interarea Oscillations of Wind Turbine Generators Based on Permanent Magnet Synchronous Generators Connected to a Power System. Turk. J. Electr. Power Energy Syst. 2024. [Google Scholar] [CrossRef]
- Gholami, M.; Abbaspour, A.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M.; Lehtonen, M. Detecting the location of short-circuit faults in active distribution network using PMU-based state estimation. IEEE Trans. Smart Grid 2019, 11, 1396–1406. [Google Scholar] [CrossRef]
- Çetin, M.S.; Gençoğlu, M.T.; Şahin, H. A Review of Electric Vehicles: Their Impact on The Electricity Grid and Artificial Intelligence-Based Approaches for Charging Load Management. Int. J. Energy Smart Grid 2024, 9, 51–59. [Google Scholar] [CrossRef]
- Regional Group Nordic. Nordic and Baltic Grid Disturbance Statistics 2020; Regional Group Nordic: Copenhagen, Denmark, 2020. [Google Scholar]
- Lale, T.; Yüksek, G. Identification and Classification of Turn ShortCircuit and Demagnetization Failures in PMSM Using LSTM and GRU Methods. Bull. Pol. Acad. Sci. Tech. Sci. 2024, e15158. [Google Scholar]
- Zeng, X.; Gao, W.; Yang, G. High impedance fault detection in distribution network based on S-transform and average singular entropy. Glob. Energy Interconnect. 2023, 6, 64–80. [Google Scholar] [CrossRef]
- Gururajapathy, S.S.; Mokhlis, H.; Illias, H.A. Fault location and detection techniques in power distribution systems with distributed generation: A review. Renew. Sustain. Energy Rev. 2017, 74, 949–958. [Google Scholar] [CrossRef]
- Aleem, S.A.; Shahid, N.; Naqvi, I.H. Methodologies in power systems fault detection and diagnosis. Energy Syst. 2015, 6, 85–108. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Fink, O.; Sansavini, G. Combined fault location and classification for power transmission lines fault diagnosis with integrated feature extraction. IEEE Trans. Ind. Electron. 2017, 65, 561–569. [Google Scholar] [CrossRef]
- Mohammadi, A.; Jannati, M.; Shams, M. Using deep transfer learning technique to protect electrical distribution systems against high-impedance faults. IEEE Syst. J. 2023, 17, 3160–3171. [Google Scholar] [CrossRef]
- Sangeeth, B.K.; Vinod, V. High impedance fault detection using multi-domain feature with artificial neural network. Electr. Power Components Syst. 2023, 51, 366–379. [Google Scholar] [CrossRef]
- Baharozu, E.; Ilhan, S.; Soykan, G. High impedance fault localization: A comprehensive review. Electr. Power Syst. Res. 2023, 214, 108892. [Google Scholar] [CrossRef]
- Lopes, G.N.; Menezes, T.S.; Gomes, D.P.; Vieira, J.C.M. High Impedance Fault Location Methods: Review and Harmonic Selection-based Analysis. IEEE Open Access J. Power Energy 2023, 10, 438–449. [Google Scholar] [CrossRef]
- Hamatwi, E.; Imoru, O.; Kanime, M.M.; Kanelombe, H.S. Comparative Analysis of High Impedance Fault Detection Techniques on Distribution Networks. IEEE Access 2023, 11, 25817–25834. [Google Scholar] [CrossRef]
- Thomas, J.B.; Chaudhari, S.G.; Shihabudheen, K.; Verma, N.K. CNN-based transformer model for fault detection in power system networks. IEEE Trans. Instrum. Meas. 2023, 72, 2504210. [Google Scholar] [CrossRef]
- Lingampalli, B.R.; Rao, K.S. Validation of Passive Islanding Detection Methods for Double Line-to-Ground Unsymmetrical Fault in a Three-Phase Microgrid System. Turk. J. Electr. Power Energy Syst. 2022, 2, 11–20. [Google Scholar] [CrossRef]
- Ola, S.R.; Saraswat, A.; Goyal, S.K.; Jhajharia, S.; Rathore, B.; Mahela, O.P. Wigner distribution function and alienation coefficient-based transmission line protection scheme. IET Gener. Transm. Distrib. 2020, 14, 1842–1853. [Google Scholar] [CrossRef]
- Abasi, M.; Sadeghian, O. A ground fault location algorithm in double-circuit transmission lines with T-off connection to an industrial microgrid by using current and voltage phasors information of a single terminal. IET Gener. Transm. Distrib. 2024, 18, 1714–1741. [Google Scholar] [CrossRef]
- Mamuya, Y.D.; Lee, Y.D.; Shen, J.W.; Shafiullah, M.; Kuo, C.C. Application of machine learning for fault classification and location in a radial distribution grid. Appl. Sci. 2020, 10, 4965. [Google Scholar] [CrossRef]
- Sowah, R.A.; Dzabeng, N.A.; Ofoli, A.R.; Acakpovi, A.; Koumadi, K.M.; Ocrah, J.; Martin, D. Design of power distribution network fault data collector for fault detection, location and classification using machine learning. In Proceedings of the 2018 IEEE 7th International Conference on Adaptive Science &Technology (ICAST), Accra, Ghana, 22–24 August 2018; pp. 1–8. [Google Scholar]
- Rathore, B.; Mahela, O.P.; Khan, B.; Alhelou, H.H.; Siano, P. Wavelet-alienation-neural-based protection scheme for STATCOM compensated transmission line. IEEE Trans. Ind. Informatics 2020, 17, 2557–2565. [Google Scholar] [CrossRef]
- Rathore, B.; Shaik, A.G. Wavelet-alienation based transmission line protection scheme. IET Gener. Transm. Distrib. 2017, 11, 995–1003. [Google Scholar] [CrossRef]
- Yadav, A.; Swetapadma, A. Enhancing the performance of transmission line directional relaying, fault classification and fault location schemes using fuzzy inference system. IET Gener. Transm. Distrib. 2015, 9, 580–591. [Google Scholar] [CrossRef]
- Ravesh, N.R.; Ramezani, N.; Ahmadi, I.; Nouri, H. A hybrid artificial neural network and wavelet packet transform approach for fault location in hybrid transmission lines. Electr. Power Syst. Res. 2022, 204, 107721. [Google Scholar] [CrossRef]
- Gopakumar, P.; Reddy, M.J.B.; Mohanta, D.K. Adaptive fault identification and classification methodology for smart power grids using synchronous phasor angle measurements. IET Gener. Transm. Distrib. 2015, 9, 133–145. [Google Scholar] [CrossRef]
- Shi, S.; Zhu, B.; Mirsaeidi, S.; Dong, X. Fault classification for transmission lines based on group sparse representation. IEEE Trans. Smart Grid 2018, 10, 4673–4682. [Google Scholar] [CrossRef]
- Ghaemi, A.; Safari, A.; Afsharirad, H.; Shayeghi, H. Accuracy enhance of fault classification and location in a smart distribution network based on stacked ensemble learning. Electr. Power Syst. Res. 2022, 205, 107766. [Google Scholar] [CrossRef]
- Gangwar, A.K.; Mahela, O.P.; Rathore, B.; Khan, B.; Alhelou, H.H.; Siano, P. A Novel k-Means Clustering and Weighted k-NN-Regression-Based Fast Transmission Line Protection. IEEE Trans. Ind. Informatics 2020, 17, 6034–6043. [Google Scholar] [CrossRef]
- Ananthan, S.N.; Padmanabhan, R.; Meyur, R.; Mallikarjuna, B.; Reddy, M.J.B.; Mohanta, D.K. Real-time fault analysis of transmission lines using wavelet multi-resolution analysis based frequency-domain approach. IET Sci. Meas. Technol. 2016, 10, 693–703. [Google Scholar] [CrossRef]
- Salehi, M.; Namdari, F. Fault classification and faulted phase selection for transmission line using morphological edge detection filter. IET Gener. Transm. Distrib. 2018, 12, 1595–1605. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Xie, Y.Z.; Yi, T.Q.; Kong, X.; Cheng, L.; Liu, H.J. Fault Detection for High-Voltage Circuit Breakers Based on Time–Frequency Analysis of Switching Transient E-Fields. IEEE Trans. Instrum. Meas. 2019, 69, 1620–1631. [Google Scholar] [CrossRef]
- Taheri, B.; Salehimehr, S.; Sedighizadeh, M. A novel strategy for fault location in shunt-compensated double circuit transmission lines equipped by wind farms based on long short-term memory. Clean. Eng. Technol. 2022, 6, 100406. [Google Scholar] [CrossRef]
- Hu, J.; Hu, W.; Chen, J.; Cao, D.; Zhang, Z.; Liu, Z.; Chen, Z.; Blaabjerg, F. Fault Location and Classification for Distribution Systems Based on Deep Graph Learning Methods. J. Mod. Power Syst. Clean Energy 2022, 11, 35–51. [Google Scholar] [CrossRef]
- Ding, C.; Ma, P.; Jiang, C.; Wang, F. Fast Fault Line Selection Technology of Distribution Network Based on MCECA-CloFormer. Appl. Sci. 2024, 14, 8270. [Google Scholar] [CrossRef]
- Sodin, D.; Rudež, U.; Mihelin, M.; Smolnikar, M.; Čampa, A. Advanced edge-cloud computing framework for automated pmu-based fault localization in distribution networks. Appl. Sci. 2021, 11, 3100. [Google Scholar] [CrossRef]
- Wan, Q.; Li, Y.; Yuan, R.; Meng, Q.; Li, X. Fault Identification and Localization of a Time- Frequency Domain Joint Impedance Spectrum of Cables Based on Deep Belief Networks. Sensors 2023, 23, 684. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Ouyang, J.; Chen, J.; Xiong, X. A Section Location Method of Single-Phase Short-Circuit Faults for Distribution Networks Containing Distributed Generators Based on Fusion Fault Confidence of Short-Circuit Current Vectors. Electronics 2024, 13, 1741. [Google Scholar] [CrossRef]
- Majidi, M.; Fadali, M.S.; Etezadi-Amoli, M.; Oskuoee, M. Partial discharge pattern recognition via sparse representation and ANN. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 1061–1070. [Google Scholar] [CrossRef]
- Pao, Y.H.; Takefuji, Y. Functional-link net computing: Theory, system architecture, and functionalities. Computer 1992, 25, 76–79. [Google Scholar] [CrossRef]
- Pao, Y.H.; Park, G.H.; Sobajic, D.J. Learning and generalization characteristics of the random vector functional-link net. Neurocomputing 1994, 6, 163–180. [Google Scholar] [CrossRef]
- Igelnik, B.; Pao, Y.H. Stochastic choice of basis functions in adaptive function approximation and the functional-link net. IEEE Trans. Neural Netw. 1995, 6, 1320–1329. [Google Scholar] [CrossRef]
- Zhou, P.; Lv, Y.; Wang, H.; Chai, T. Data-driven robust RVFLNs modeling of a blast furnace iron-making process using Cauchy distribution weighted M-estimation. IEEE Trans. Ind. Electron. 2017, 64, 7141–7151. [Google Scholar] [CrossRef]
- Haydaroğlu, C.; Gümüş, B. Fault Detection in Distribution Network with the Cauchy-M Estimate—RVFLN Method. Energies 2022, 16, 252. [Google Scholar] [CrossRef]
- Kilic, H.; Gumus, B.; Yilmaz, M. Fault detection in photovoltaic arrays: A robust regularized machine learning approach. DYNA-Ing. E Ind. 2020, 95, 622–628. [Google Scholar] [CrossRef] [PubMed]
- Kiliç, H.; Gumus, B.; Khaki, B.; Yilmaz, M.; Palensky, P.; Authority, P. A Robust Data-Driven Approach for Fault Detection in Photovoltaic Arrays. In Proceedings of the 10th IEEE PES Innovative Smart Grid Technologies Europe, ISGT-Europe, Virtual, 26–28 October 2020. [Google Scholar]
- Eryılmaz, B.; Kılıç, H.; Koçyiğit, F. Makine Öğrenimi Tabanlı Kısa Vadeli Fotovoltaik Çıkış Gücü Tahminlemesi. EMO Bilimsel Dergi 2023, 13, 57–69. [Google Scholar]
- Dai, W.; Chen, Q.; Chu, F.; Ma, X.; Chai, T. Robust regularized random vector functional link network and its industrial application. IEEE Access 2017, 5, 16162–16172. [Google Scholar] [CrossRef]
- Li, M.; Wang, D. Insights into randomized algorithms for neural networks: Practical issues and common pitfalls. Inf. Sci. 2017, 382, 170–178. [Google Scholar] [CrossRef]
- Hoerl, A.E.; Kennard, R.W. Ridge regression: Biased estimation for nonorthogonal problems. Technometrics 1970, 12, 55–67. [Google Scholar] [CrossRef]
- Huynh, H.T.; Won, Y. Regularized online sequential learning algorithm for single-hidden layer feedforward neural networks. Pattern Recognit. Lett. 2011, 32, 1930–1935. [Google Scholar] [CrossRef]
- Scott, D.W. Multivariate Density Estimation: Theory, Practice, and Visualization; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Hansen, P.C. Rank-Deficient and Discrete Ill-Posed Problems: Numerical Aspects of Linear Inversion; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Gümüs, B.; Kılıç, H.; Haydaroglu, C.; Butakın, U.Y. Fault type and fault location detection in transmission lines with 6-convolutional layered CNN. Bull. Pol. Acad. Sci. Tech. Sci. 2024, 72. [Google Scholar] [CrossRef]
- Nascimento, A.L.; Yahyaoui, I.; Fardin, J.F.; Encarnação, L.F.; Tadeo, F. Modeling and experimental validation of a PEM fuel cell in steady and transient regimes using PSCAD/EMTDC software. Int. J. Hydrog. Energy 2020, 45, 30870–30881. [Google Scholar] [CrossRef]
- Athay, T.; Podmore, R.; Virmani, S. A Practical Method for the Direct Analysis of Transient Stability. IEEE Trans. Power Appar. Syst. 1979, PAS-98, 573–584. [Google Scholar] [CrossRef]
- Cupelli, M.; Doig Cardet, C.; Monti, A. Voltage stability indices comparison on the IEEE-39 bus system using RTDS. In Proceedings of the 2012 IEEE International Conference on Power System Technology (POWERCON), Auckland, New Zealand, 30 October–2 November 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Montoya, J.; Brandl, R.; Vishwanath, K.; Johnson, J.; Darbali-Zamora, R.; Summers, A.; Hashimoto, J.; Kikusato, H.; Ustun, T.S.; Ninad, N.; et al. Advanced laboratory testing methods using real-time simulation and hardware-in-the-loop techniques: A survey of smart grid international research facility network activities. Energies 2020, 13, 3267. [Google Scholar] [CrossRef]
- Sidwall, K.; Forsyth, P. Advancements in real-time simulation for the validation of grid modernization technologies. Energies 2020, 13, 4036. [Google Scholar] [CrossRef]
- Dash, P.K.; Das, S.; Moirangthem, J. Distance protection of shunt compensated transmission line using a sparse S-transform. IET Gener. Transm. Distrib. 2015, 9, 1264–1274. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Notation | Formulation |
|---|---|---|
| U1 | current magnitude | |
| U2 | voltage magnitude | |
| U3 | current angle | |
| U4 | voltage angle | |
| U5 | derivative of current magnitude | |
| U6 | derivative of voltage magnitude | |
| U7 | derivative of current angle | |
| U8 | derivative of voltage angle | |
| U9 | ||
| U10 | ||
| U11 | ||
| U12 | ||
| U13 | ||
| U14 |
| With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | |
|---|---|---|---|---|---|---|---|---|
| ORR-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 61 | 59 | 63 | 60 | 66 | 62 | 69 | 65 |
| >400 m | 0 | 1 | 4 | 5 | 7 | 9 | 10 | 14 |
| Cauchy-M-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 64 | 62 | 66 | 63 | 69 | 65 | 72 | 68 |
| >400 m | 3 | 4 | 6 | 7 | 9 | 11 | 12 | 16 |
| RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 66 | 64 | 68 | 65 | 71 | 67 | 73 | 69 |
| >400 m | 5 | 5 | 8 | 9 | 11 | 13 | 14 | 18 |
| CNN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 69 | 67 | 71 | 68 | 74 | 70 | 76 | 72 |
| >400 m | 6 | 7 | 9 | 10 | 12 | 14 | 15 | 19 |
| LSTM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 70 | 67 | 71 | 68 | 74 | 70 | 77 | 73 |
| >400 m | 7 | 7 | 10 | 11 | 13 | 15 | 16 | 20 |
| SVM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 70 | 68 | 72 | 69 | 75 | 71 | 78 | 73 |
| >400 m | 8 | 8 | 11 | 12 | 14 | 16 | 17 | 21 |
| ELM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 72 | 70 | 73 | 70 | 76 | 72 | 79 | 75 |
| >400 m | 10 | 11 | 14 | 15 | 17 | 19 | 20 | 24 |
| With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | |
|---|---|---|---|---|---|---|---|---|
| ORR-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 51 | 49 | 54 | 50 | 57 | 53 | 49 | 56 |
| >400 m | 0 | 0 | 1 | 2 | 2 | 4 | 5 | 6 |
| Cauchy- M-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 52 | 53 | 58 | 51 | 58 | 54 | 50 | 56 |
| >400 m | 1 | 1 | 2 | 3 | 3 | 5 | 6 | 7 |
| RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 53 | 51 | 56 | 52 | 59 | 55 | 51 | 57 |
| >400 m | 2 | 2 | 3 | 4 | 4 | 6 | 7 | 7 |
| CNN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 57 | 55 | 59 | 55 | 62 | 58 | 54 | 61 |
| >400 m | 3 | 3 | 4 | 5 | 5 | 6 | 7 | 8 |
| LSTM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 57 | 55 | 60 | 56 | 63 | 59 | 55 | 61 |
| >400 m | 4 | 4 | 5 | 6 | 6 | 8 | 8 | 9 |
| SVM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 58 | 56 | 61 | 56 | 63 | 59 | 55 | 61 |
| >400 m | 8 | 8 | 9 | 10 | 10 | 12 | 13 | 14 |
| ELM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 59 | 57 | 62 | 58 | 65 | 61 | 57 | 64 |
| >400 m | 7 | 7 | 8 | 9 | 9 | 11 | 12 | 12 |
| With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | |
|---|---|---|---|---|---|---|---|---|
| ORR-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 55 | 53 | 58 | 56 | 61 | 58 | 63 | 59 |
| >400 m | 0 | 0 | 2 | 3 | 4 | 6 | 8 | 9 |
| Cauchy-M-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 57 | 55 | 60 | 58 | 63 | 59 | 64 | 60 |
| >400 m | 2 | 2 | 4 | 5 | 6 | 8 | 9 | 10 |
| RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 58 | 56 | 61 | 59 | 64 | 61 | 66 | 62 |
| >400 m | 3 | 3 | 5 | 6 | 6 | 8 | 10 | 11 |
| CNN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 61 | 59 | 64 | 62 | 67 | 64 | 69 | 65 |
| >400 m | 4 | 4 | 6 | 7 | 8 | 9 | 11 | 12 |
| LSTM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 62 | 60 | 65 | 63 | 68 | 64 | 69 | 65 |
| 400 m | 5 | 5 | 7 | 8 | 9 | 10 | 12 | 13 |
| SVM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 63 | 60 | 65 | 63 | 68 | 65 | 70 | 66 |
| >400 m | 6 | 6 | 8 | 9 | 10 | 11 | 13 | 14 |
| ELM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 64 | 62 | 67 | 65 | 70 | 66 | 71 | 67 |
| >400 m | 8 | 8 | 10 | 11 | 12 | 14 | 16 | 17 |
| With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | With Noise | Without Noise | |
|---|---|---|---|---|---|---|---|---|
| ORR-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 58 | 57 | 60 | 59 | 62 | 60 | 65 | 61 |
| >400 m | 0 | 1 | 3 | 4 | 5 | 8 | 9 | 12 |
| Cauchy-M-RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 61 | 60 | 63 | 61 | 64 | 62 | 67 | 63 |
| >400 m | 2 | 3 | 5 | 6 | 7 | 10 | 11 | 14 |
| RVFLN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 62 | 61 | 64 | 63 | 66 | 64 | 68 | 64 |
| >400 m | 4 | 5 | 7 | 7 | 8 | 11 | 12 | 15 |
| CNN | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 65 | 64 | 67 | 66 | 69 | 67 | 72 | 68 |
| >400 m | 5 | 6 | 8 | 8 | 9 | 12 | 13 | 16 |
| LSTM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 66 | 65 | 68 | 66 | 69 | 67 | 72 | 68 |
| >400 m | 6 | 7 | 9 | 9 | 10 | 13 | 14 | 17 |
| SVM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 66 | 65 | 68 | 67 | 70 | 68 | 73 | 69 |
| >400 m | 7 | 8 | 10 | 10 | 11 | 14 | 15 | 18 |
| ELM | 0 ohm | 30 ohm | 50 ohm | 100 ohm | ||||
| 0–50 m | 68 | 67 | 70 | 69 | 71 | 69 | 74 | 70 |
| >400 m | 9 | 10 | 12 | 13 | 14 | 17 | 18 | 21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haydaroğlu, C.; Kılıç, H.; Gümüş, B.; Özdemir, M.T. Advancing Fault Detection in Distribution Networks with a Real-Time Approach Using Robust RVFLN. Appl. Sci. 2025, 15, 1908. https://doi.org/10.3390/app15041908
Haydaroğlu C, Kılıç H, Gümüş B, Özdemir MT. Advancing Fault Detection in Distribution Networks with a Real-Time Approach Using Robust RVFLN. Applied Sciences. 2025; 15(4):1908. https://doi.org/10.3390/app15041908
Chicago/Turabian StyleHaydaroğlu, Cem, Heybet Kılıç, Bilal Gümüş, and Mahmut Temel Özdemir. 2025. "Advancing Fault Detection in Distribution Networks with a Real-Time Approach Using Robust RVFLN" Applied Sciences 15, no. 4: 1908. https://doi.org/10.3390/app15041908
APA StyleHaydaroğlu, C., Kılıç, H., Gümüş, B., & Özdemir, M. T. (2025). Advancing Fault Detection in Distribution Networks with a Real-Time Approach Using Robust RVFLN. Applied Sciences, 15(4), 1908. https://doi.org/10.3390/app15041908